Edge N-Level Sparse Visibility Graphs: Fast Optimal Any-Angle Pathfinding Using Hierarchical Taut Paths
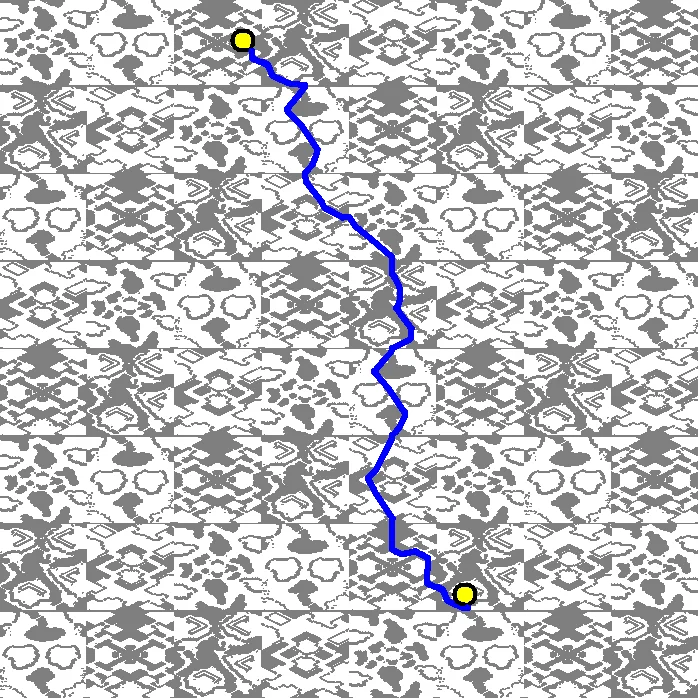
In the Any-Angle Pathfinding problem, the goal is to find the shortest path between a pair of vertices on a uniform square grid, that is not constrained to any fixed number of possible directions over the grid. Visibility Graphs are a known optimal algorithm for solving the problem with the use of pre-processing. However, Visibility Graphs are known to perform poorly in terms of running time, especially on large, complex maps. In this paper, we introduce two improvements over the Visibility Graph Algorithm to compute optimal paths. Sparse Visibility Graphs (SVGs) are constructed by pruning unnecessary edges from the original Visibility Graph. Edge N-Level Sparse Visibility Graphs (ENLSVGs) is a hierarchical SVG built by iteratively pruning non-taut paths. We also introduce Line-of-Sight Scans, a faster algorithm for building Visibility Graphs over a grid. SVGs run much faster than Visibility Graphs by reducing the average vertex degree. ENLSVGs, a hierarchical algorithm, improves this further, especially on larger maps. On large maps, with the use of pre-processing, these algorithms are orders of magnitude faster than existing algorithms like Visibility Graphs and Theta*.
💡 Research Summary
The paper addresses the Any‑Angle path‑finding problem, where the goal is to compute the Euclidean‑shortest path between two grid cells without restricting movement to a fixed set of directions. The classic optimal solution is A* on a Visibility Graph (VG), which connects every obstacle corner (and the start/goal) with line‑of‑sight (LOS) edges. While optimal, VG suffers from two major drawbacks: (1) building the graph requires O(V²) LOS checks, which becomes prohibitive on large maps, and (2) the resulting graph has a high average vertex degree, causing A* to expand many nodes during search.
To overcome these issues, the authors propose two successive improvements: Sparse Visibility Graphs (SVG) and Edge N‑Level Sparse Visibility Graphs (ENLSVG), together with a new construction technique called Line‑of‑Sight Scans.
Sparse Visibility Graph (SVG)
The key insight is that every optimal any‑angle path is a “taut” path – a path that cannot be locally tightened because each turn wraps tightly around an obstacle. Using this property, the authors define a “taut region” around each vertex: the set of directions from which a continuation can remain taut. An edge uv is kept only if each endpoint lies within the other’s taut region; otherwise it is pruned. This eliminates edges that could never appear in a taut (hence optimal) path unless they are incident to the start or goal, which are added later anyway. The authors also handle collinear vertices by linking each point only to its immediate neighbours, preventing the formation of large cliques. The resulting SVG has a dramatically lower average degree (about 2.5× less than VG on random maps) while preserving optimality.
Line‑of‑Sight Scans
Instead of performing pairwise LOS checks, the authors introduce a scan‑based method that computes all visible neighbours of a given vertex in one pass. The scan radiates outward from the source, stops when it hits an obstacle, and can be implemented using interval propagation similar to the Anya algorithm. Two variants are described: an “All‑Direction” scan for full visibility and a “Taut‑Direction” scan that restricts the search to the previously computed taut regions. Pre‑computing left/right extents for each grid cell further accelerates the scans. This local approach reduces construction time from quadratic to near‑linear in the number of visible vertices.
Edge N‑Level Sparse Visibility Graph (ENLSVG)
While SVG prunes edges that lack a taut exit after a single hop, many remaining edges are useful only for a very limited set of start‑goal pairs. ENLSVG introduces an edge‑level hierarchy to prune further. An edge is assigned level k (≥0) if at one endpoint it has no taut neighbour of level > k‑1, but does have at least one taut neighbour of level k‑1; edges that do not satisfy any finite level receive level ∞ (called Level‑W). The authors provide an iterative algorithm that repeatedly removes edges of increasing level until no more can be removed.
Two theoretical results are proved: (1) any taut path’s edge‑level sequence first strictly increases to a peak and then strictly decreases; (2) Level‑W edges are exactly those belonging to taut cycles (similar to tangent graphs around obstacle convex hulls). Consequently, during a query the search can be restricted to edges whose levels increase from the start, then traverse Level‑W edges, and finally follow decreasing‑level edges toward the goal. This “edge marking” strategy guarantees that the optimal path is still explored while dramatically shrinking the search space.
Experimental Evaluation
The authors evaluate SVG and ENLSVG on randomly generated maps with obstacle densities from 6 % to 40 % and on real game maps (e.g., EbonLakes). Results show:
- SVG reduces average vertex degree by roughly a factor of 2.5 compared with VG.
- Construction time using LOS scans is an order of magnitude faster than naïve VG construction.
- ENLSVG, after preprocessing, answers shortest‑path queries up to 100 × faster than Theta* and many times faster than the original VG, while still returning optimal paths.
- Memory consumption is also lower because fewer edges are stored.
Limitations and Future Work
ENLSVG requires offline preprocessing; any change to the map forces a recomputation of the hierarchy. The authors suggest investigating incremental updates for dynamic environments. Additionally, Level‑W edges, while necessary for handling cycles, still incur some overhead; further compression or heuristic pruning of these cycles could improve performance. Extending the approach to 3‑D environments or non‑uniform grids is identified as an open direction.
Conclusion
By exploiting the taut‑path property and introducing a hierarchical edge‑level pruning scheme, the paper delivers a practical, optimal any‑angle path‑finding framework that outperforms existing optimal (VG) and heuristic (Theta*, Anya) methods by orders of magnitude on large maps. The combination of Sparse Visibility Graphs, Edge N‑Level hierarchy, and fast LOS scans makes the approach suitable for real‑time applications such as video‑game navigation, robotics, and GIS routing where optimality and speed are both critical.
Comments & Academic Discussion
Loading comments...
Leave a Comment