Distributed Cooperative Manipulation under Timed Temporal Specifications
This paper addresses the problem of cooperative manipulation of a single object by N robotic agents under local goal specifications given as Metric Interval Temporal Logic (MITL) formulas. In particular, we propose a distributed model-free control protocol for the trajectory tracking of the cooperatively manipulated object without necessitating feedback of the contact forces/torques or inter-agent communication. This allows us to abstract the motion of the coupled object-agents system as a finite transition system and, by employing standard automata-based methodologies, we derive a hybrid control algorithm for the satisfaction of a given MITL formula. In addition, we use load sharing coefficients to represent potential differences in power capabilities among the agents. Finally, simulation studies verify the validity of the proposed scheme.
💡 Research Summary
The paper tackles the problem of cooperative manipulation of a single rigid object by N mobile manipulators under complex timed specifications expressed in Metric Interval Temporal Logic (MITL). Unlike most existing works that rely on centralized control, inter‑robot communication, or force/torque sensing, the authors propose a fully distributed, model‑free control scheme in which each robot uses only its own joint measurements and known geometric parameters to compute its end‑effector pose and velocity. No contact‑force feedback or communication is required, which significantly reduces hardware and networking demands.
The system dynamics are first modeled in detail. The kinematic relationship between each robot’s end‑effector frame and the object’s center of mass is derived, leading to a coupled Jacobian that is always invertible due to the rigid grasp assumption. The object and each robot are described by unknown but continuous Newton‑Euler dynamics. By exploiting the kineto‑static duality, the forces exerted by the robots and the resultant wrench on the object are linked through a grasp matrix, yielding a compact coupled dynamics equation.
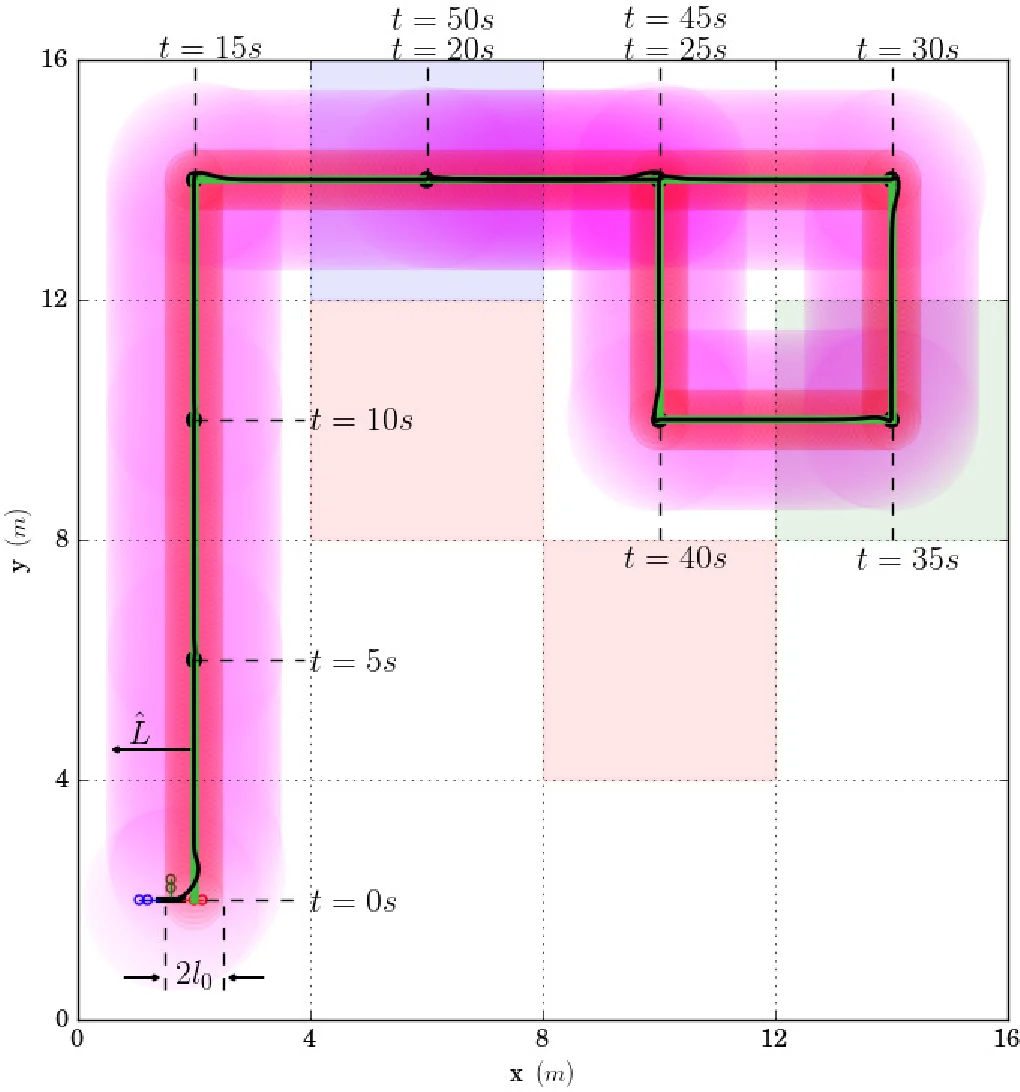
To enable formal synthesis, the workspace is partitioned into uniformly sized rectangular cells whose size accounts for the maximal extent of the robot‑object assembly (parameter (\hat L)). Definitions are given for when the coupled system resides in a cell and for a timed transition between adjacent cells, including a bound on the transition duration. A labeling function maps each cell to a set of atomic propositions (e.g., “goal”, “obstacle”), and a timed run is defined as the infinite sequence of visited cells together with the corresponding timestamps.
The control objective is to generate a trajectory that satisfies a given MITL formula, such as “reach region B within 5–10 s while always avoiding region C”. To achieve this, the authors first design a continuous‑time distributed controller based on prescribed performance control (PPC). The controller guarantees that the object’s position error evolves within a predefined funnel, thereby enforcing bounds on convergence speed and overshoot. Load‑sharing coefficients are introduced to distribute the required wrench among robots according to their power capabilities, preventing overload of weaker agents.
With the guaranteed transient performance, each transition between cells can be realized within a known time bound. Consequently, the continuous system can be abstracted as a finite transition system (FTS). Standard automata‑based synthesis techniques are then applied: the MITL specification is translated into a timed automaton, composed with the FTS, and a feasible path (product automaton) is extracted. This path dictates a sequence of cells and the timing at which the object must move from one cell to the next. The distributed controller tracks this high‑level plan by adjusting the desired velocity of the object accordingly.
Simulation results with two manipulators handling a heavy payload demonstrate the effectiveness of the approach. The robots successfully follow a trajectory that satisfies the MITL task, respect the prescribed transition times, and avoid forbidden regions, all without any force sensing or communication. The load‑sharing mechanism equalizes the control effort among the robots, confirming its practical benefit.
In summary, the contributions are: (1) a novel distributed, model‑free control law for cooperative manipulation that eliminates force/torque sensing and inter‑robot communication; (2) a rigorous abstraction of the coupled dynamics into a finite transition system enabling MITL‑based formal synthesis; (3) incorporation of load‑sharing coefficients to handle heterogeneous robot capabilities; and (4) validation through realistic simulations. The work opens avenues for extending the framework to non‑rigid grasps, dynamic obstacles, and experimental hardware implementations.
Comments & Academic Discussion
Loading comments...
Leave a Comment