Optimized Spatial Partitioning via Minimal Swarm Intelligence
Optimized spatial partitioning algorithms are the corner stone of many successful experimental designs and statistical methods. Of these algorithms, the Centroidal Voronoi Tessellation (CVT) is the most widely utilized. CVT based methods require global knowledge of spatial boundaries, do not readily allow for weighted regions, have challenging implementations, and are inefficiently extended to high dimensional spaces. We describe two simple partitioning schemes based on nearest and next nearest neighbor locations which easily incorporate these features at the slight expense of optimal placement. Several novel qualitative techniques which assess these partitioning schemes are also included. The feasibility of autonomous uninformed sensor networks utilizing these algorithms are considered. Some improvements in particle swarm optimizer results on multimodal test functions from partitioned initial positions in two space are also illustrated. Pseudo code for all of the novel algorithms depicted here-in is available in the supplementary information of this manuscript.
💡 Research Summary
The manuscript addresses a fundamental problem in many scientific and engineering domains: how to partition a spatial domain efficiently and robustly. While the Centroidal Voronoi Tessellation (CVT) is the de‑facto standard, it suffers from several practical drawbacks: it requires global knowledge of the domain boundaries, it is difficult to incorporate weighted regions, its implementation becomes cumbersome in high‑dimensional spaces, and the underlying algorithms (e.g., Lloyd’s iteration) are computationally intensive. To overcome these limitations, the authors propose two minimalist swarm‑based partitioning schemes that rely only on local nearest‑neighbor information.
The first scheme, called the Repulsive Agent Optimizer (RAO), initializes a set of agents at random positions, computes the mean L1 distance ( (\bar d) ) between each agent and its nearest neighbor (NN), and then applies a repulsive displacement whenever the actual distance (|i-j|) falls below (\bar d). The displacement vector is proportional to the distance deficit and points along the line joining the two agents. Boundary handling is achieved by an “image charge” analogy: when an agent approaches a wall, a mirror image of the agent is placed on the opposite side of the boundary, and the same repulsive rule is applied between the real and image agents, effectively keeping the agent inside the feasible region.
The second scheme, Orthogonal Nearest‑Neighbor Repulsive Agent Optimizer (ONNRAO), augments RAO with a second repulsion based on the next‑nearest neighbor (NN+1). For each agent the two nearest neighbors define a line segment; the algorithm computes the perpendicular distance from the agent to this segment. If this orthogonal distance is smaller than the global mean orthogonal distance, the agent is displaced away from the line segment by a magnitude proportional to the deficit. This extra step mitigates the tendency of agents to collapse onto collinear configurations, a known weakness of pure nearest‑neighbor repulsion.
Both algorithms iterate until the sum of squared position changes falls below a user‑defined threshold, or a maximum iteration count is reached (the latter is necessary because chaotic or Markov‑type effects can prevent strict convergence).
The authors evaluate the methods on a series of 2‑D experiments. In a square domain with 100 agents, the CVT reproduces the expected hexagonal dual (consistent with Gersho’s conjecture). RAO yields primarily quadrilateral cells, while ONNRAO produces a heterogeneous mix of polygons. Statistical analysis shows that RAO has the largest variance in nearest‑neighbor distances, ONNRAO is intermediate, and CVT has the smallest variance. Probability density functions (PDFs) derived from 1 000+ trials reveal that ONNRAO’s spatial distribution is the most diffuse for non‑square agent counts (10, 13), whereas for a square count (25) its PDF resembles that of CVT. Cumulative distribution functions (CDFs) further confirm that ONNRAO fills the domain more rapidly than RAO for irregular agent numbers, but the opposite holds for a perfect square count.
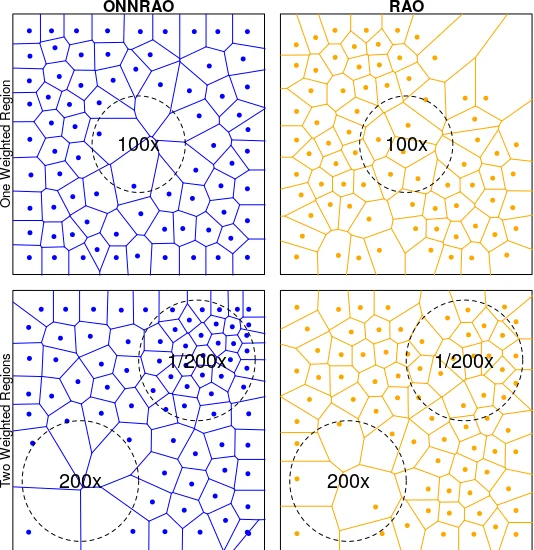
Weighted region handling is demonstrated with circular zones whose influence is scaled by factors of 100, 200, or 1/200. ONNRAO readily respects these weights, moving agents into high‑weight zones and away from low‑weight zones. RAO, however, suffers from early‑stage “over‑repulsion” when large weights are applied, leaving large voids; the authors note that applying weights only after an un‑weighted convergence stage can alleviate the problem, albeit at the cost of added complexity.
Obstacle avoidance is tested with a central square obstacle and an offset rectangle. Both algorithms use the image‑charge technique to keep agents clear of obstacles, but ONNRAO again achieves a more uniform coverage, while RAO struggles when the total number of agents drops below ten.
Higher‑dimensional scalability is explored up to five dimensions. Because neither algorithm requires construction of N‑dimensional simplices, they remain computationally tractable. The authors perform a principal component analysis (PCA) on the final agent clouds; an ideal partition would allocate equal variance (1/N) to each principal component. ONNRAO’s variance distribution is closest to this ideal across dimensions, whereas RAO’s results are comparable to random placement, indicating limited benefit from the additional orthogonal repulsion in higher dimensions.
Performance profiling shows a stark contrast in iteration counts: for 75 agents in a unit square, RAO needs roughly 8 500 iterations to converge, while ONNRAO converges in about 600 iterations. Consequently, direct runtime comparisons are difficult, but the trend suggests that the orthogonal repulsion dramatically accelerates convergence. The overall computational complexity remains O(N²) per iteration, implying that large‑scale deployments would benefit from parallelization (e.g., GPU) or approximate nearest‑neighbor data structures (k‑d trees, ball trees).
Finally, the authors illustrate a practical application: initializing a particle swarm optimizer (PSO) with positions generated by ONNRAO. On multimodal benchmark functions, the PSO exhibits faster convergence and a higher probability of locating the global optimum, demonstrating that even a sub‑optimal spatial partition can be valuable as a diverse, well‑spread initial population.
In summary, the paper contributes two lightweight, locally‑driven partitioning algorithms that sidestep the global‑knowledge requirement of CVT, naturally incorporate weighted regions and obstacles, and scale to higher dimensions without complex geometric constructions. While neither method achieves the theoretical optimality of CVT (hexagonal tilings in 2‑D), ONNRAO in particular offers a compelling trade‑off between implementation simplicity, adaptability, and empirical performance, especially for distributed sensor networks, swarm robotics, and meta‑heuristic initialization. Open challenges remain in guaranteeing convergence, tuning repulsion parameters, and improving uniformity in very high dimensions, providing fertile ground for future research.
Comments & Academic Discussion
Loading comments...
Leave a Comment