A Review of Neural Network Based Machine Learning Approaches for Rotor Angle Stability Control
This paper reviews the current status and challenges of Neural Networks (NNs) based machine learning approaches for modern power grid stability control including their design and implementation methodologies. NNs are widely accepted as Artificial Intelligence (AI) approaches offering an alternative way to control complex and ill-defined problems. In this paper various application of NNs for power system rotor angle stabilization and control problem is discussed. The main focus of this paper is on the use of Reinforcement Learning (RL) and Supervised Learning (SL) algorithms in power system wide-area control (WAC). Generally, these algorithms due to their capability in modeling nonlinearities and uncertainties are used for transient classification, neuro-control, wide-area monitoring and control, renewable energy management and control, and so on. The works of researchers in the field of conventional and renewable energy systems are reported and categorized. Paper concludes by presenting, comparing and evaluating various learning techniques and infrastructure configurations based on efficiency.
💡 Research Summary
This paper provides a comprehensive review of neural‑network (NN) and machine‑learning (ML) techniques applied to rotor‑angle stability control in modern power grids. It begins by outlining the challenges posed by increased renewable penetration and load growth, which introduce strong nonlinearities, time‑varying dynamics, and a high dimensionality that render traditional algebraic‑differential models and linearized controllers inadequate for many operating conditions. To address these issues, the authors focus on measurement‑based, data‑driven approaches, with a particular emphasis on supervised learning (SL) and reinforcement learning (RL) as the two dominant paradigms for wide‑area control (WAC) and transient stability assessment (TSA).
The review first clarifies the fundamentals of rotor‑angle stability, describing the swing equations of synchronous generators and distinguishing between small‑signal (linear) and transient (non‑linear) stability. It then details the hierarchical control structure of power systems: local (fast‑acting) controllers, secondary Automatic Generation Control (AGC), tertiary optimization layers, and the higher‑level WAC that coordinates geographically dispersed agents via SCADA, PMU, and communication networks. Traditional WAC designs rely on frequency‑domain methods, root‑locus criteria, and robust or optimal control theory, but they often struggle with the non‑linear inter‑area oscillations that arise in large‑scale, renewable‑rich grids.
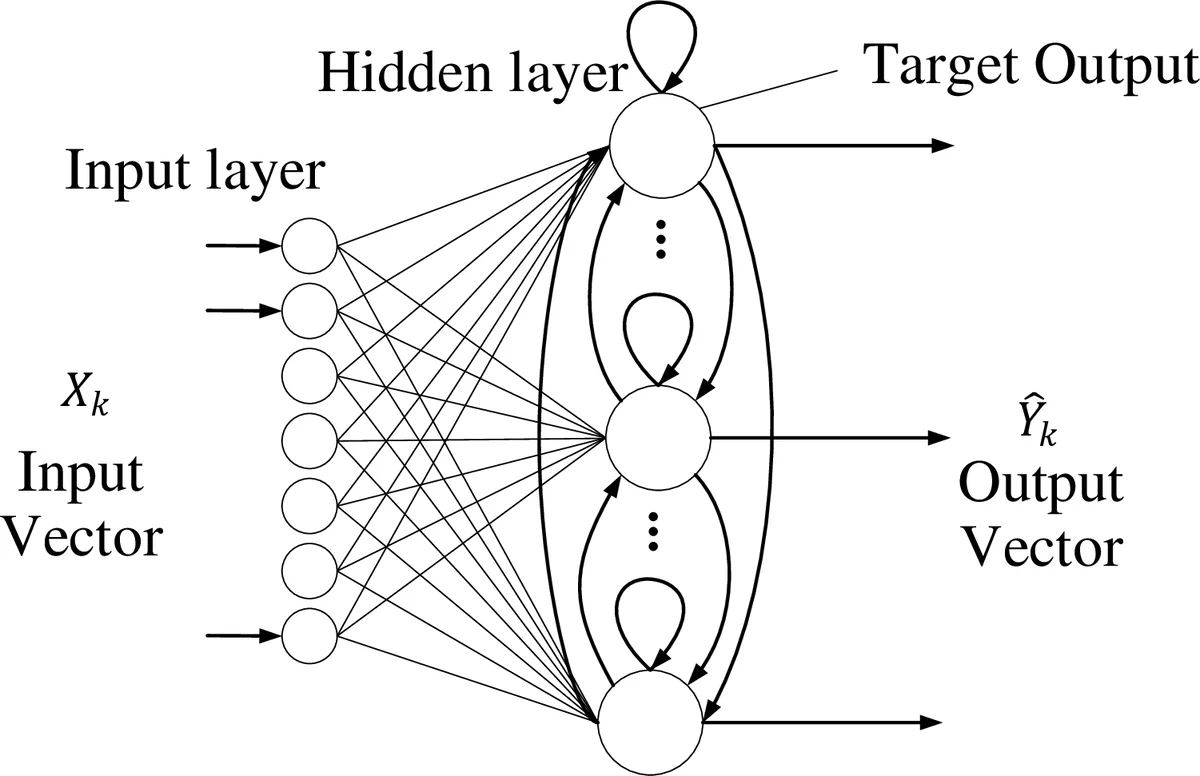
Neural networks are classified into static (MLP, RBF, functional‑link) and dynamic (RNN, SRN, time‑delay) families. Static NNs excel at mapping fixed input‑output pairs and are therefore well‑suited for offline TSA, critical clearing‑time prediction, and classification of fault types. Radial‑basis‑function networks show superior performance in pattern‑recognition tasks, while multilayer perceptrons provide efficient function approximation. Dynamic NNs incorporate internal state or memory, enabling them to capture the continuous evolution of system variables; this makes them attractive for real‑time prediction, model‑based predictive control, and online adaptation.
In the supervised‑learning segment, the paper surveys regression and classification applications that use labeled datasets derived from historical disturbances, simulation archives, or hardware‑in‑the‑loop experiments. These SL models learn static mappings such as rotor‑angle deviation versus post‑fault voltage, or they predict the stability margin based on a set of measured phasor variables. The authors note that SL benefits from relatively fast convergence and straightforward validation, but it depends heavily on the availability of high‑quality, representative training data.
Reinforcement learning is presented as the primary tool for sequential decision‑making and optimal control under uncertainty. The authors discuss actor‑critic and adaptive‑critic designs, where an “actor” generates control signals (e.g., supplementary excitation, FACTS set‑points) and a “critic” evaluates a value function that encodes system performance (voltage deviation, frequency deviation, power loss, control effort). RL agents are trained using PMU streams and can learn policies that adapt to changing operating points, renewable fluctuations, and topology reconfigurations. The review highlights several RL‑based WAC case studies that demonstrate improved damping of inter‑area modes, larger stability margins, and reduced reliance on precise system models. However, challenges such as sample efficiency, convergence guarantees, computational load for real‑time deployment, and safety‑critical verification are emphasized.
Unsupervised learning is briefly covered as a technique for extracting coherent groups of generators during faults, using clustering or dimensionality‑reduction methods to identify inter‑area oscillation patterns without labeled data. This information can feed hierarchical control schemes, enabling dynamic re‑allocation of control resources.
The paper then integrates these ML approaches into the traditional control hierarchy, proposing hybrid architectures where NN‑based modules augment local PSS, AGC, and tertiary optimizers. For example, a static NN can provide fast TSA predictions that trigger secondary control actions, while a dynamic RL controller continuously adjusts excitation to suppress emerging oscillations.
Finally, the authors discuss practical impediments: the curse of dimensionality, data quality, real‑time implementation constraints, and the lack of rigorous reliability and safety certification. They advocate for hardware acceleration (FPGA, GPU), cloud‑edge hybrid training pipelines, formal verification, and simulation‑in‑the‑loop testing to bridge the gap between research prototypes and field‑ready solutions. The review concludes that NN and ML techniques hold significant promise for enhancing rotor‑angle stability, but their successful adoption will require multidisciplinary collaboration, standardized performance metrics, and robust validation frameworks.
Comments & Academic Discussion
Loading comments...
Leave a Comment