Evaluating Impact of Mobility on Wireless Routing Protocols
In this paper, we evaluate, analyze, and compare the impact of mobility on the behavior of three reactive protocols (AODV, DSR, DYMO) and three proactive protocols (DSDV, FSR, OLSR) in multi-hop wireless networks. We take into account throughput, end…
Authors: N. Javaid, M. Yousaf, A. Ahmad
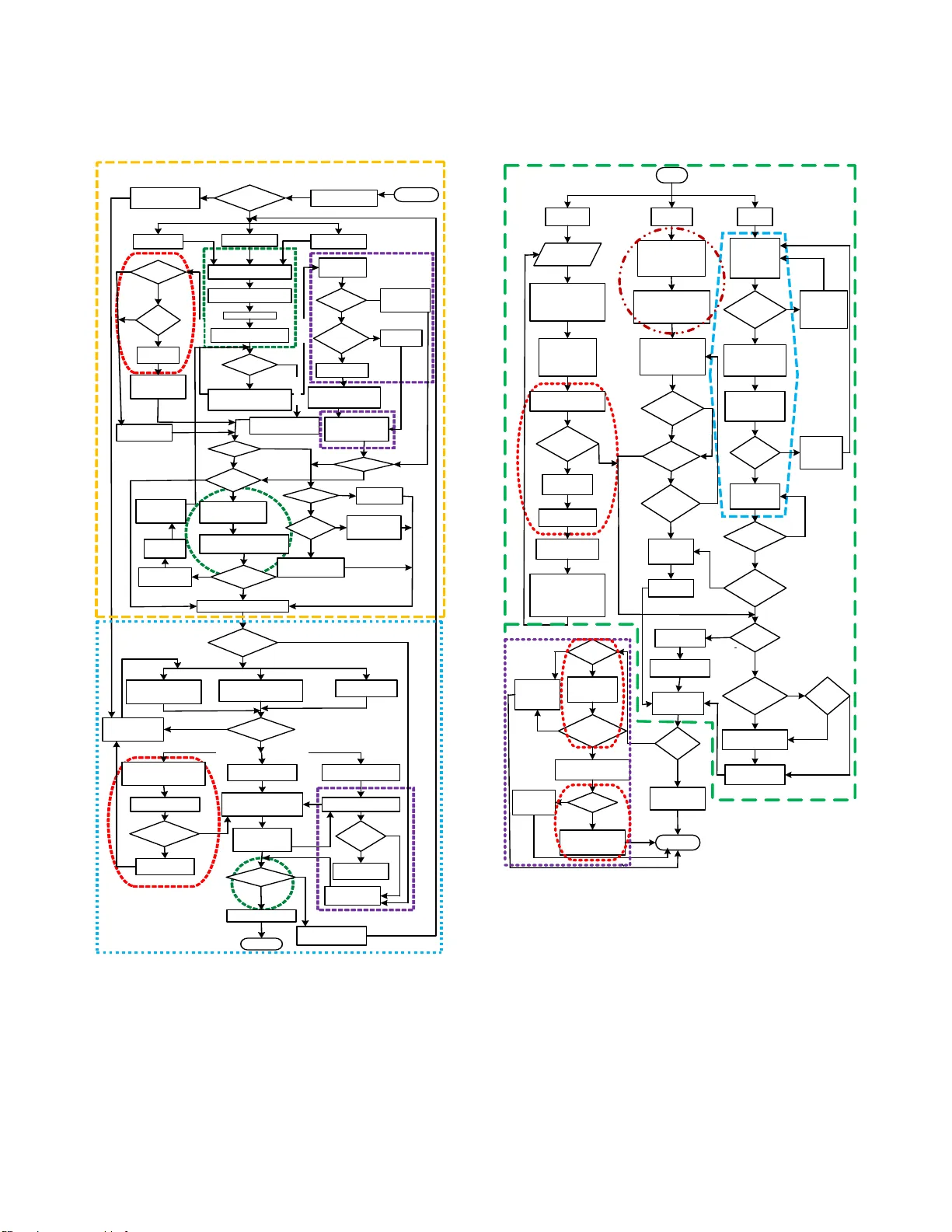
1 Ev aluating Impact of Mob ility on W ireless Routing Protocols N. Jav a id † , $ , M. Y ousaf $ , A. Ahmad ‡ , A. Na veed ‡ , K. Djouani † , § † LISSI, Uni versit ´ e Paris-Est Cr ´ eteil (UPEC), Franc e. { nade em.jav aid,d jouani@univ-paris12.fr } $ Dept. of E lectrical Engineering, COMSA TS, Islamab ad, Pakistan. { nadeemjavaid@comsats.edu.pk } ‡ Institute of Co mputing and Information T echnolog y , Goma l University , D.I.Kha n, Pakistan. § French South African Institute o f T echn ology , Pretoria, S outh Africa. { djouanik@tut.ac.za } Abstract —In this paper , we ev aluate, analyze, and compare the impact of mobility on the behavior of t hree reactiv e protocols (A ODV , DSR, D YMO) and three proa ctive protocols (DSD V , FSR, OLSR) in multi-h op wir eless networks. W e take into account throughput, end-to-end delay , an d normalized routing load as perfo rmance parameters. Based upon th e extensive simulation results in NS-2, we rank all of six p rotoc ols according to the perfo rmance parameter s. Besides p ro vid ing the interesting facts regar ding th e response of each protocol on varying mobilities and speeds, we also study the trade-offs, th e routing protocols hav e t o make. Such as, to achie ve throughput, a proto col has to pay some cost in th e f orm of in crease d end-to-end delay or routing overhead. Index T erms —A ODV , DSD V , DSR, DYMO, FSR, OLSR, throughput, end-to-end delay , normalized routing load, wireless multi-hop networks, mobility I . I N T RO D U C T I O N T o correctly illustrate the performance e valuation of the routing protoco ls, it is remarkab ly significant to exactly depict the movement of mobile n odes. So , Shams et al. in [1] d e- signed scenario -based m obility mod els which closely present the movement patterns of users in rea l life and th ey ha ve ev aluated two reactive ro uting p rotocols, A ODV and DSDV . The propo sed mob ility models are: Fas t Car Model (FCM), Slow Car Mo del (SCM), Hu man Running Model (HRM) an d Human W alkin g Mod el (HWM). W e follow the same models for this study . FCM states that the mobile no des are vehicles moving up to the speed s of 30m/s or 10 8km/h [2] on h ighways and motor ways. In pra ctice, vehicles do not move with this speed all th e time rath er they take pauses at dif fe rent br eak points and traffic signals. Thus ’pause-time’ intervals are also considered . L ike FCM, SCM also con siders th e vehicles but moving with th e sp eed of 15m/s or 45k m/h on the busy roads and cannot move at higher speeds. It is ob served that most of the times, wirele ss devices are carried by the huma ns. For example, sold iers in the combat zone can r un or walk, peop le jogging on different tracks, in emergency s ituations, sports and so on. I n short, 8m/s or 2 8.8km /h c an be taken as a n av e rage speed for SCM. Th e HWM is identical to the HRM model but with an average speed of 2m/s or 7 .2km/h [2]. The examples for HWM may be p eople walking in the sho pping centers, university or college ca mpuses, etc. Being an interface between the under lying wireless n etwork and mobile users, a r outing protocol plays an impo rtant role. So, to provid e the reade r with a compreh ensiv e idea about routing and how do the ro uting p rotocols reac t to the topolo gical changes, we have cho sen th e most widely experimented an d f requen tly used protocols f or our study; three f rom reactive o r on- demand class: Ad-hoc On-dem and Distance V ector (A OD V) , Dynamic Sour ce Routing (DSR), D Ynamic M ANET On-dem and (D YMO), and thre e from proactive or table-driven class Destination Sequ enced Distance V ector (DSDV), Fish-eye State Routing (FSR), Optimized Link State Routing (OL SR). Autho rs in [ 1], h av e an alysed two p rotocols; A ODV and DSD V . Simu lations are run for fo ur pause times ( 0s, 1 s, 10s a nd 4 50s). Howe ver, routing protocols being categorized in reactiv e and pr oactive class es are yet to be analyzed. Mo reover , to per form a pr ecise and detailed analysis we ha ve simulated six protoco ls with ten pau se times (0s, 100s, 200s,. . . and 900 s). I I . R O U T I N G P RO T O C O L S A N D M O B I L I T Y This section is devoted to short descriptio n of each protoco l, stating th e ro uting tech nique work ing beh ind it, class to wh ich the protocol b elongs; i. e ., reacti ve or p roactive, the way in which it per forms r ou te discovery (RD) , r oute maintenance (RM) , r o ute table ( RT) calculation and at the end , the claims made b y e ach pro tocol to deal with the mo bility . At the en d of section , T ab le.1 sum marizes all o f the six pro tocols. A. Reactive p r otocols and mob ility A OD V [3], [ 4], DSR [3 ], [5], [6] and D YMO [7], [8] are multi-ho p on -demand routing protoco ls. Th eir on-deman d nature has a great impact on mobility because they co mpute routes o nly when nee ded m aking them suitab le f or mo bile scenarios. A ODV claims that ”it can hand le low , mo derate, and relativ ely hig h mob ility ra tes, as well as a variety o f data traffic levels” [4]. DSR c laims that ”it a dapts quickly to the top ological changes when movement of nod es is fr equent. It r equires little or no routing overhead dur ing the period s in which no des mov e less frequently o r remain at rest” [6]. D YMO states that “it ada pts to changing network topolo gy and determines un icast routes b etween nodes within the network in ’ on-dem and’ fashion” [7]. So, in this study we ev aluate and compare the perfor mance of these proto cols b ased up on their claims regardin g mobility . All of thre e protoco ls use flooding based RD for path calcu lation, as shown in Fig.1. A OD V uses 2 hop-b y-hop routing wh ile DSR and D YMO use source rou ting as pa cket forwarding sch eme. These protoco ls implement two common operation s: RD and RM . Start AODV node DYMO node Node requests for destination Start ring search RD Buffer RREQ _ID & source IP _addr Broadcast 1 st RREQ message Set TTL =1 Dest . is known Active route Time _Out Yes No Generate gratuitous RREP/ RREP RREP(s) recvd RREP (s) > 1 No Net_Traversal Time expires No Increment RREQ _RETRIES and double TTL RREQ_RETRIES <=MAX_RETRIES Generate a new RREQ Increment Seq_num Select this route No Equal Seq _num Select route with greater seq_num yes Select min_ hop_count No Yes Yes No Stop route discovery Yes Broadcast RREQ message Net _Traversal Time = 2*Net _Traversal Time Yes DSR node First check route cache Route is available Select this route Select the best route Available multiple routes No Yes Route discovery phase Receiver of RREQ check its route cache or route table Wait for dest. RREP( s) Dest . is unknown for source Yes D S R n o d e Select this route A O D V n o d e Generate gratuitous RREP / RREP Wait for dest . RREP (s) No No Yes RREP(s) recvd Intermediate receiver cache this route (s) No Yes Route discovery successful DYMO node sends HELLO messages to active route DSR node gets passive ack . DYMO node Detect link break Link break detector node DSR node starts link repair Send RRERR message End No yes AODV node sends HELLO messages to active route AODV nodes buffer request until link repair time Route maintenance phase No yes Successful repair No Continue sending data Monitor active route yes Receiver ( s ) of RERR delete faulty route ( s) Send data on known route No Route available Salvage the packet Check route cache yes RREQ_TIME OUT Discard packet Re- initiate Rout e Discovery No Check RREQ time yes No (i) (ii) (B) (C) (a) (b ) (c ) AODV/DSR node Yes wait for dest . RREP D Y M O n o d e No Yes (A ) Fig. 1: Reactiv e proto cols, ’ rou te discovery’ and ’ ro ute main- tenance’. B. Pr oactive Pr otoco ls and Mobility DSD V [9], FSR [10], [11] a nd OLSR [12], [13], are table- driven proacti ve pro tocols. All of the se pro activ e protoc ols use hop-b y-hop r o uting scheme for pac ket forwarding. I n DSDV , distance vector p ackets are dispersed and then Distributed Bellman F o r d (DBF) algo rithm is used for path calculation, as sho wn in Fig. 2. In FSR, DBF algorithm is used fo r path calculation and link state packets are not floo ded. The no des maintain a lin k state table based o n up -to-date inform ation received from th e neighb oring nodes and they periodically exchange it with th eir local neig hbors only . Start DSDV node FSR node OLSR node Recorded routing table Node sends T _ updates Periodically broadcast distant vector information for each dest Send 1. Dest addr 2. Next hop 3. Metric For each dest Send I _update via NPDU Receiving update node r _table by deleting faulty routes and increments seq _num Send NPDU (s ) for update the r _ table Periodically with GFT period broadcast /recv RM messages RM distributes link state information via DBF method Node waits for receiving RM message from neighbor node rcev RM No time expire No For listed neighbor in r_table Yes No Delete the neighbor from r _table Yes Periodically transmit and wait to recv . HELLO Messages A node recv. HELLO message No Yes Empty link set , MPR set and MPRs Get information of link type and link code Compute MPR , MPRs , 1 st hop neighbor set Available MPR Stop TC message generation No Yes generate TC message Cover whole Topology No Yes A node Recv TC message A node recv P _update Or T _update Yes No Update the r_table Yes Neighbor link fail No Dest . is new Yes No old_seq _num AO D V > D S D V > DY M O > OLS R > F S R . DSD V sends m or e nu mber o f data pa ck ets tha n rest of the pr o tocols with th e lowest speed of 2m/s, at 0s pause time. Because, ro utes with the same sequ ence n umber are not retransmitted until the route becomes stabilized , as shown in Fig.2, step (ii) in the data r equ est phase . DSD V ’ s thr ough put decr ea ses at high mob ility when speed incr ea ses . As, simu ltaneously increasing speed and mobility increases incon sistency in RT calculation which leads to decrease in throu ghput as o bvious fro m b, c, d, in Fig.4. DSD V achieves the sam e thro ughpu t values at all spee ds and at modera te an d no mobilities because in less mob ility size of an in cr ementa l b ecomes equal to size of a NPDU to ma ke the next incremental smaller . For example, wh en a stab ilized route shows a new sequ ence number for the sam e destination but the m etric remains the same then this change is suppo sed to be non-significan t an d is dec ided to be advertised after stabilization. 20 40 60 80 100 0 50 100 150 200 No. of nodes Throughput (kb/s) 1 pack/s 2 pack/s 4 pack/s (a) Scalabi lity analysi s 0 200 400 600 800 0 50 100 150 200 250 300 Pause Time (s) Throughput (kb/s) (b) T raffic analysis Fig. 5: FSR perfo rmance analysis with varying packet rates and scalab ilities FSR’s strange beha vior : (i) Though it is pr oa ctive b ut its thr ough put is decr ea sing with dec r easing mob ility because in lo w mobilities m ultiple ro utes are av ailab le in RC . There is lack of any mechanism to dele te expired stale routes in FSR, like DSR, o r to determ ine the fr eshness of routes when multiple rou tes are av ailab le in route cac he, like A OD V . (ii) I t is showing least thr oughp ut among all pr otocols . The r easons include: firstly , for higher traffic rates (large number of packets per second) FSR works well [10]. It has been depicted in Fig.5.a. by simulating a scen ario with 50 no des moving at 20m/s speed. It is obvious f rom Fig that FSR with large number of packets achiev e s more thro ughp uts. Secon dly , FSR is best suited for large scale multi-hop wir eless networks, as the scope upd ate sc heme can ben efit in reducing the numb er of routing u pdate pac kets and a chieve high data packet to r outing packet r atio. Th is fact is demonstrated in Fig.5.b. where we have simu lated FSR with 20 m/s node speed for varying number of no des, 10, 20, . . , 100. DSR achieves maximum average th roug hput avg among all six protoco ls, as, durin g higher m obility , less RERR m essages and RREQ messages are to be sen t due to av ailability of valid routes in RC . The promiscuous mode o f DSR, as described in Fig.1, step(b) , m akes able this protoc ol to hand le th e h igh mobility . V . E N D - T O - E N D D E L AY ( E 2 E D ) It is the time a p acket takes to reach th e destination fro m the source. W e have measured it as the m ean of Round T r ip T ime taken by all packets. A. E2ED p r oduced by reactive pr otocols As dem onstrated in Fig.6, A ODV am ong reactive protoco ls attains the highest delay . Because LLR for link breaks in routes sometimes result in increa sed path lengths. D YMO prod uce the lowest E 2 E D avg among reactive p rotocols beca use it only uses the ERS for r oute fin ding that results less delay; as checkin g the RC in (DSR) and RT in (A OD V) b efore route discovery through ER S attains a some d elay . At higher spee ds, DSR suffers the higher AE 2ED. Th e r easons inclu de: for RD , it first searches the desired rou te in RC and then starts RD , if the search fails. As, DSR do es no t im plement LLR , so its AE2ED is less than A ODV but during mod erate and high mobility at h igh speed R C sear ch fails freq uently a nd results in incre ased delay . 0 200 400 600 800 0 0.05 0.1 0.15 0.2 End−to−end delay (s) (a) HWM (2 m/s) 0 200 400 600 800 0 0.05 0.1 0.15 0.2 (b) HRM (8 m/s) AODV DSR DYMO 0 200 400 600 800 0 0.05 0.1 0.15 0.2 Pause time (s) End−to−end delay (s) (c) SCM (15 m/s) 0 200 400 600 800 0 0.05 0.1 0.15 0.2 Pause time (s) (d) FCM (30 m/s) Fig. 6: End -to-end delay by reactive pr otocols B. E2ED p r oduced by pr o active pr otocols In all pro activ e p rotocols, E2 ED value is directly pro - portion al to speed an d mob ility , as depicted in Fig.7. Th e proactive pro tocols have mo re AE2ED as co mpared to the reactive o nes, as they calcu late R T befor e d ata tran smission. DSD V possess the hig hest E2ED a mong pr oactive p rotocols in m oderate an d n o mo bility situation s, as well as in all cases its E2E D is higher than O LSR. Because DSDV keep s a data packet until it receiv e s a go od route cr eating delay . Fur ther- more, ad vertisements of the routes which are n ot stabilized yet, is d elayed in ord er to reduce the n umber of rebr oadcasts of po ssible rou te entries. FSR at hig her mobilities, possess the highest AE2ED among proactive pro tocols. Due to GF mechanism when m obility increases, routes to remote destination s be come less accurate. Howe ver, when a packet ap proache s its destination, it fin ds 5 increasingly a ccurate rou ting instruction s as it enters sectors with a h igher refresh ra te. At m oderate and no mobilities at all spee ds, value of en d-to-en d d elay is the same as well as this delay is less than other proactive protocol. It is du e to retaining a ro ute entry for ea ch destinatio n, that av oid s extra work of ”finding ” the destination as in on-d emand routing. 0 200 400 600 800 0 0.05 0.1 0.15 0.2 End−to−end delay (s) (a) HWM (2 m/s) 0 200 400 600 800 0 0.05 0.1 0.15 0.2 (b) HRM (8 m/s) DSDV FSR OLSR 0 200 400 600 800 0 0.05 0.1 0.15 0.2 Pause time (s) End−to−end delay (s) (c) SCM (15 m/s) 0 200 400 600 800 0 0.05 0.1 0.15 0.2 Pause time (s) (d) FCM (30 m/s) Fig. 7: End-to- end d elay by pro activ e p rotocols C. Interes ting facts r egar ding E2 ED Generally , r eactiv e protoco ls cause more d elay as c ompared to the proac ti ve ones. E2ED gen erated b y all 6 pro tocols is: AOD V > D S R > F S R > D S D V > D Y M O > O LS R , which means that wh en ta lking about E 2ED, OLSR out perfor ms rest of the fi ve pr otocols. E2ED o f DYMO is less not only among th e r eactive pr otoco ls but also fr o m DSDV a nd FSR because it neither adapts strategy of RC like DSR (step(a) , Fig.1) nor LLR mechanism like A ODV (step(iii), Fig .1). More over , D YMO uses ERS alg orithm which is mo re effi cient for red ucing E2ED as comp ared to GF of FSR an d waiting f or the b est route mechanism in DSDV . DSR ha s the highest E2ED in FCM at moderate and high speed. Because at h igh speed, fo r unreach able destinatio ns, ERS alg orithm (step(B) of Fig.1 .) produce s delay to calculate valid routes. As DSR works well in moderate and r elati vely high rates of mobility , it has to comp romise on delay to calculate valid ro utes. A ODV suffers fr om m aximum E 2 E D avg . As, LLR mecha- nism is initiated after lin k breakag e d etection. I n RM phase, step(iii) of Fig.1 is demo nstrating that starting of LLR , som e- times r esults in increased path lengths. OLSR achieves the lowest E2ED. When comparin g with proactive protocols, OLSR genera tes per iodic HELLO and T opo logy Contr ol (TC) messages to ch eck links as well to compute the MPRs ( R T calcula tion phase step(a ) in Fig. 2.) to better reduce the delay as compar ed to per iodic exchan ge of whole table with the neighbo rs in FSR and periodic and trigger up dates in DSDV . V I . N O R M A L I Z E D R O U T I N G L O A D ( N R L ) NRL is th e numb er of routin g packets transmitted by a routing p rotocol fo r a sin gle data packet to be delivered successfully at the destination . 0 200 400 600 800 0 2 4 6 Normalized Routing Load (a) HWM (2 m/s) AODV DSR DYMO 0 200 400 600 800 0 2 4 6 (b) HRM (8 m/s) 0 200 400 600 800 0 2 4 6 Pause time (s) Normalized Routing Load (c) SCM (15 m/s) 0 200 400 600 800 0 2 4 6 Pause time (s) (d) FCM (30 m/s) Fig. 8: Routin g overhead by reactive pro tocols A. NRL generated by reactive pr otocols Due to the absence of g ratuitous RREPs, D YMO pr oduces higher ro uting overhead tha n not only reactive pro tocols b ut also DSD V and FSR. Whereas, DSR, due to the promiscu ous listening m ode has the lowest routing load . 0 200 400 600 800 0 2 4 6 Normalized Routing Load (a) HWM (2 m/s) DSDV FSR OLSR 0 200 400 600 800 0 2 4 6 (b) HRM (8 m/s) 0 200 400 600 800 0 2 4 6 Pause time (s) Normalized Routing Load (c) SCM (15 m/s) 0 200 400 600 800 0 2 4 6 Pause time (s) (d) FCM (30 m/s) Fig. 9: Routin g overhead by proactive p rotocols Although , A OD V uses gr atuitous RREPs but due to the use of HELLO messages like D YMO and lo cal link repair , it causes mor e routing load than DSR. On e comm on noticeable behavior of all reacti ve pro tocols is that at high spe eds and/or high m obilities, rou ting ov erhead is high er as comp ared to moderate an d lo w mo bilities an d/or speeds. Becau se, in response to link breakage , all o f the on -deman d pr otocols dis- seminate RERR message to inform th e ro ute r equest gene rator about the faulty lin ks an d prev ent th e u se of inv a lid ro utes. A s in high dynam ic situations, the link breakag e is f requen t, so, more RERR messages are generated r esulting in high NRL. B. Routing overhea d pr odu ced by p r oactive pr otoco ls Fig. 7 shows that OLSR due to comp utation of MPRs throug h TC an d HELLO message s results in the hig hes g en- eration r ate o f r outing packets. The lowest NRL is pro duced by DSDV , because, incr emen tal and periodic updates th rough NPDUs reduce the routin g overhead. Moreover, FSR has lower rou ting overhead tha n OL SR because it prefers p eriodic updates instead of event driven exchanges of the topology map which g reatly helps in red ucing the contro l message overhead 6 20 40 60 80 100 0 2 4 6 No. of nodes Normalized Routing Load 1 pack/s 2 pack/s 4 pack/s (a) Scalabi lity analysi s 0 200 400 600 800 0 1 2 3 4 5 6 Pause Time (s) Normalized Routing Load (b) Mobility analysis Fig. 10: FSR p erform ance analysis with different packet rates during high mob ility r ates. Also, in FSR lin k state packets are not flood ed. Instead, nod es maintain a link state table b ased on the up-to- date info rmation received from neig hbor n odes and are p eriodically exchang e it with their local neighb ors only (no flo oding) . C. Interes ting facts r egar ding r o uting lo ad Generally , both classes of pr otocols; reactive an d pr oactive have to suffer from ro uting load d uring higher m obilities and at higher speeds. Follo win g o rder depicts routing over head of six pro tocols in which OLSR suffers from the highest numb er of routing packets: O LS R > D Y M O > F S R > AO D V > D S D V > D S R . A ODV possesses mor e NRL th an DS R during all cases o f mobility , b ecause an A O D V nod e o ffers con nectivity infor ma- tion by bro adcasting local HELLO messages u nlike DSR. T ABLE II : Perf ormance trad- offs mad e by routin g protoco ls Protocol Modification to Advances achieved Price to pay routing technique AO DV Sequence number along Hi thru pt (Fig .3.d, 0s) in causes delay due to local with local link repair hiest mobility/hi est speed link repair (Fig.6) DSDV Sequence no. with hiest thrupt when mobilit y i s causes delay due to avg. avg. settling time hi and speed is lo (Fig.4.a,0s) settl ing time (Fig.7,0s) DSR Route cache technique Caches learned rout es and C auses delay when link breaks increase throug hput. (Fig .3) are frequent. (Fig.6.d, < 600s) DYM O W ithout route cache and Reduces E2ED in hi mobility Decre ases th roughput. (Fig.6.c.d) gratuitou s rout e reply and in high speed. (Fig.3) and NRL when speed and mobilit y is high. (Fig.8.c.d. < 500s) FSR Multipath routing, More thru put i n hi mobility as Less throu ghput and i ncreased Fisheye scopes with comprd to lo moblty .(Fig.4, E2ED during hi mobility and graded frequency < 400) and decrease in NRL. speed. Fig.8. > 600s and mechanism (Fig.4. < 400s) Fig.7.b.c .d < 300s Lo E2ED with more thruput OLSR MPR (Fig.4, > 300) in medium or no Highest NRL, due to MPR’s calculation mobility or when speed is lo comput ation. (Fig.7.) (Fig.9, > 300s) D YMO give s higher NRL value a mong all r eactive pr o tocols for the reason that thou gh ERS algorithm is used to red uce the routing overhead, but A ODV and DSR generate grat. RREP messages. As dem onstrated in step (iii) and in step(c) in RM pha se o f Fig.1, which possibly avoid the secon d RD . These messag es are not gener ated in D YMO causing highe r generation r ates of routing p ackets than bo th A OD V and DSR. On the oth er han d, RC strate gy fu rther r educes NRL of DSR as co mpared to A OD V . FSR’s r outin g overhead is increasing with decr ea se in mobility . The re ason is tha t availability of routes in R C is in versely p roportio nal to mob ility , i.e., in low mobilities m ore routes are available. There is lack of any mech anism to de lete the expired stale routes in FSR or to determine the freshness of routes when m ultiple routes ar e a vailable in route cach e. These mu ltiple routes no t only increase the NRL but also affect th rough put. The reason s for strange thr oughp ut of FSR are equally valid for routin g lo ad. W ith the same simulation scenarios as carrie d to justify FSR’ s strange throu ghpu t in Fig.5, we ju stify th e stran ge NRL of FSR, as shown in Fig.10. V I I . P E R F O R M A N C E T R A D E - O FF S M A D E B Y P RO T O C O L S In this section, r eferring to r outing techniques,u pon which the ro uting pro tocols are impleme nted, we co mpare the per- forman ce of the ro uting pro tocols they achiev e and price they pay . Trade-offs, th e r outing protocols have to make, are listed in the table. 2. V I I I . C O N C L U S I O N A N D F U T U R E W O R K The massive simulations dem onstrate that reac ti ve protoco ls are superior to proa cti ve ones f or mobility constrain t. A OD V nodes send data packets merely carry ing addresses of destina - tion unlike DSR that carry th e sour ce routes also. So , DSR ha s more overhea d in b ytes than A OD V . Whe reas, DSR has less overhead in terms of numb er of packets. A OD V broad casts periodic HELLO messages a nd sends more con trol me ssages than DSR to find an d repair the routes by LLR technique, so, it produ ces mo re ro uting load tha n DSR. Th is can be conc luded that A OD V an d DSR show the best perfor mance during all mobilities and at all speeds. A OD V should be chosen where the numbe r o f hops is no t a prob lem an d the no des prefer low byte overhead on the pac kets. For delay sensiti ve application s, D YMO in reactive pro tocols and OLSR in proac ti ve p rotocols are the pla usible choices. During all this ev aluation, we com e to realize that the most im portant compo nent o f a ro uting protoco l is r outing link metric, so , future we are interested to propo se and imp lement a new ETX-b ased routing link metric with A OD V an d OLSR, as discussed in [1 4], [ 15], [1 6]. R E F E R E N C E S [1] Sham-ul-Arfee n et al, ”Perfo rmance Ev aluation of MANET Rou ting Protocol s Using Scenari o Based Mobility Models”, Innova tiv e Al- gorithms and T echniques in Automation, Industr ial Electronics and T elec ommunicati ons, Springer , 2007. pp. 419-424. [2] W ikipedia. ”Orders of magnitude (speed)”. A v ailab le May 27, 2010. http:/ /en.wikip edia.or g/wiki/Orders-of-magnitude-(speed ). [3] S. Das, et al., ”Performa nce Comparison of T wo On-demand Routing Protocol s for Ad Hoc Networks, ” in INFOCOM (1), 2000, pp. 3-12. [4] C. Perkins, et al. IETF RFC3561, ”Ad hoc On-Demand Distance V ector (A OD V) Routing”. A v ailable: http://www .ietf.or g/rfc/rfc3561.txt [5] D. Johnson, et al., ”DSR: The Dynamic Source Routing Protocol for Multi-Hop Wire less Ad Hoc Networks, ” in In Ad Hoc Network ing, edite d by Charle s E. Perkins, Chapter 5, 2001, pp. 139-172. [6] D. Johnson, et al., IETF RFC, ”The Dynamic Source Routing Protocol (DSR) for Mobile Ad Hoc Networks for IPv4”, ” 2007. [7] I. Chakeres and C. E . Perkins, IET F Draft dymo-05, ”Dynamic MANE T On-demand (DYMO) Routing”, ” 2006. [8] R. E. Thorup, ” Implementing and Eval uating the D YMO Routing Protocol ”,Master Thesis, 2007. [9] C. E . Perkins and P . Bhagwat , ”Highly dynamic Destination-Se quence d Distance -V ect or routing (DSDV) for mobile compute rs, ” SIGCOMM Comput. Commun. Rev ., vol. 24, pp. 234-244, 1994. [10] G. Pei, et al., ”Fishe ye State Routing in Mobile Ad Hoc Networks, ” in ICDCS W orkshop on Wirel ess Netw orks and Mobile Computing, 2000, pp. D71-D78. [11] M. G erla, et al., IETF Draft-01, ”Fishe ye State Routing Protoco l (FS R) for Ad Hoc Netw orks”, ” 2000. [12] T . Clausen and P . Jacquet, ”Opt imized Link State Routing Prot ocol (OLSR), ” ed, 2003. [13] T . Clausen and P . Jacquet, IETF RFC-3626, ”Optimize d Link State Routing Protocol OLSR, ” The Interne t Society http://www. ietf. org/r fc/rfc36 26. txt, 2003. [14] Jav aid, N. , Jav aid, A. , Khan, I. A. and Djouani, K., ”Performance Study of ETX Based W ireless Routing Metrics, ” 2nd International Conference on Compute r, Control and Communicati on, pp. 1-7 (2009). [15] Nadeem Jav aid, A yesha Bibi, Karim Djouani , ”Interferen ce and band- width adjuste d ET X in wireless multi-hop networks” , USA, Glob e- com2010. [16] Nadeem Jav aid, Muti Ullah, Karim Djouani, ”Identifying Design Re- quirement s for W ireless Routing Link Metrics”, USA, Globecom2011.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment