Discrete Partitioning and Coverage Control for Gossiping Robots
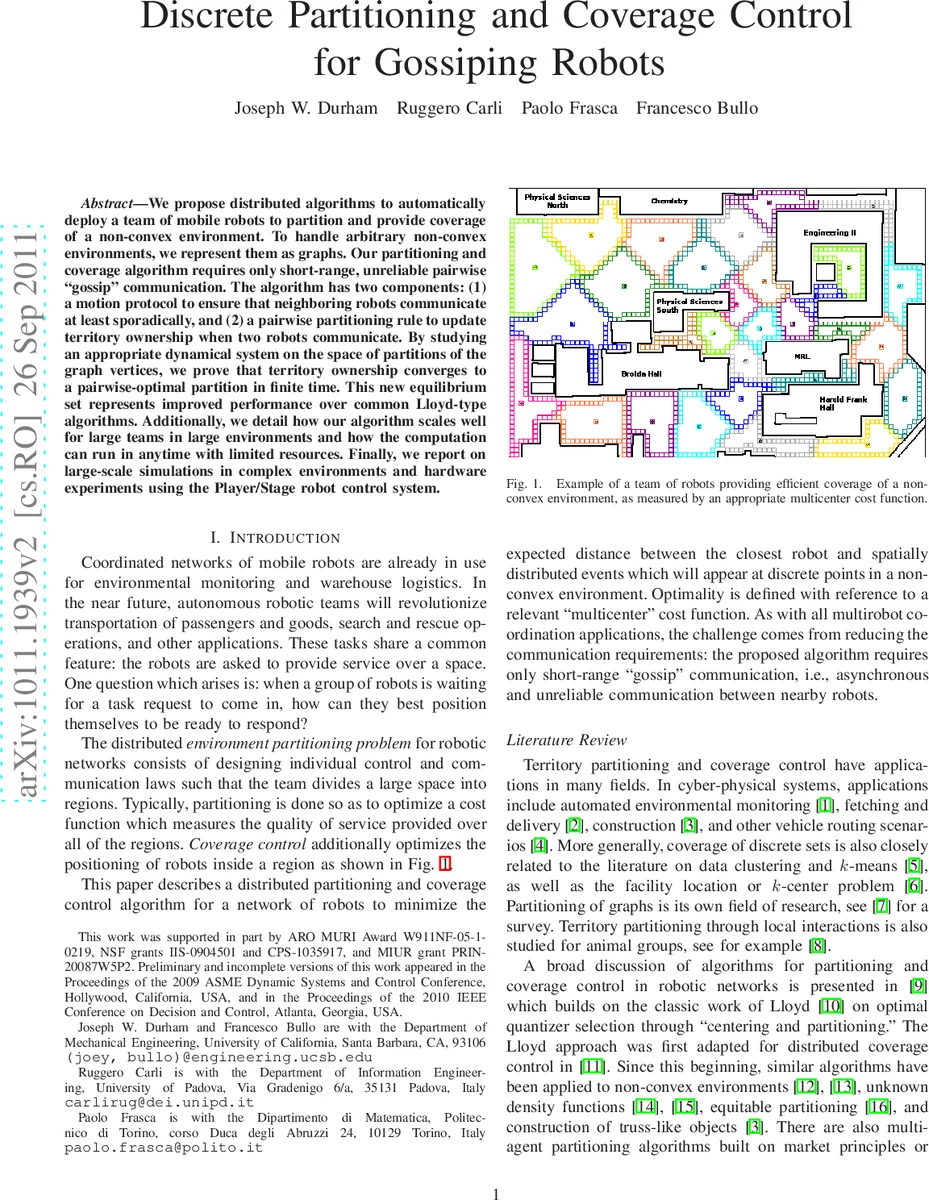
We propose distributed algorithms to automatically deploy a team of mobile robots to partition and provide coverage of a non-convex environment. To handle arbitrary non-convex environments, we represent them as graphs. Our partitioning and coverage algorithm requires only short-range, unreliable pairwise “gossip” communication. The algorithm has two components: (1) a motion protocol to ensure that neighboring robots communicate at least sporadically, and (2) a pairwise partitioning rule to update territory ownership when two robots communicate. By studying an appropriate dynamical system on the space of partitions of the graph vertices, we prove that territory ownership converges to a pairwise-optimal partition in finite time. This new equilibrium set represents improved performance over common Lloyd-type algorithms. Additionally, we detail how our algorithm scales well for large teams in large environments and how the computation can run in anytime with limited resources. Finally, we report on large-scale simulations in complex environments and hardware experiments using the Player/Stage robot control system.
💡 Research Summary
The paper presents a fully distributed algorithm that enables a team of mobile robots to autonomously partition and cover a non‑convex environment using only short‑range, unreliable pairwise “gossip’’ communication. The environment is first discretized into a weighted undirected graph G(Q) = (Q,E,w), where vertices represent points of interest and edge weights encode distances. Each robot is assigned a connected subgraph (region) P_i and a centroid C(P_i) that minimizes the one‑center cost H_one.
The algorithm consists of two complementary components. (1) A motion protocol drives each robot toward the centroid of its current region while guaranteeing occasional encounters with neighboring robots. Encounters are stochastic but can be encouraged by random walks or goal‑directed paths, ensuring that even with asynchronous, lossy communication the network remains intermittently connected. (2) When two robots i and j meet, they exchange region information and jointly recompute an optimal two‑partition of the union P_i ∪ P_j. This is done by evaluating the one‑center cost for every vertex in the combined subgraph, selecting the vertex that minimizes the cost as the new centroid, and then splitting the union into two connected subsets that each contain one of the two centroids and achieve the minimal possible multicenter cost. The update strictly reduces the global expected coverage cost H_expected = H_multicenter(Cd(P),P).
Mathematically, the set of all connected N‑partitions Part_N(Q) is finite. The pairwise update defines a deterministic map T: Part_N(Q) → Part_N(Q) that is non‑increasing with respect to H_expected. The authors prove that repeated application of T converges in finite time to a pairwise‑optimal partition, i.e., a partition where no adjacent pair of regions can be repartitioned to obtain a lower cost. Pairwise‑optimal partitions form a strict subset of centroidal Voronoi partitions, eliminating many sub‑optimal Voronoi configurations that can trap Lloyd‑type algorithms.
Complexity analysis shows that each update requires only a shortest‑path computation and a centroid search on the combined subgraph, which can be performed with Dijkstra’s algorithm in O(|P_i∪P_j| log |Q|) time. Because the subgraph size is bounded by the local region, the algorithm is suitable for real‑time execution on resource‑constrained platforms and possesses an “anytime’’ property: partial improvements are immediately usable if computation must be halted.
The authors validate the approach through extensive simulation and hardware experiments. In simulation, 30 robots cover a campus‑scale map containing multiple rooms, corridors, and holes. The gossip‑based partitioning converges faster and yields a 15–20 % reduction in average expected distance to service events compared with a gossip‑Lloyd baseline. In a hardware‑in‑the‑loop test using the Player/Stage framework, low‑cost robots equipped with noisy odometry and lidar still achieve stable partitions and correctly move toward their region centroids despite sensor noise and communication drops.
In summary, the paper contributes (1) a graph‑based discretization that naturally handles non‑convex, multiply‑connected spaces, (2) a gossip‑only communication scheme that requires only intermittent pairwise contacts, (3) a provably convergent pairwise‑optimal partitioning rule that outperforms traditional Lloyd‑type methods, and (4) a scalable implementation demonstrated on both large‑scale simulations and real robots. The methodology is applicable beyond ground robots to any distributed system where tasks are assigned over a discrete network, such as UAV swarms, logistics routing, or sensor placement problems.
Comments & Academic Discussion
Loading comments...
Leave a Comment