Distributed Opportunistic Scheduling For Ad-Hoc Communications Under Noisy Channel Estimation
Distributed opportunistic scheduling is studied for wireless ad-hoc networks, where many links contend for one channel using random access. In such networks, distributed opportunistic scheduling (DOS) involves a process of joint channel probing and d…
Authors: Dong Zheng, Man-On Pun, Weiyan Ge
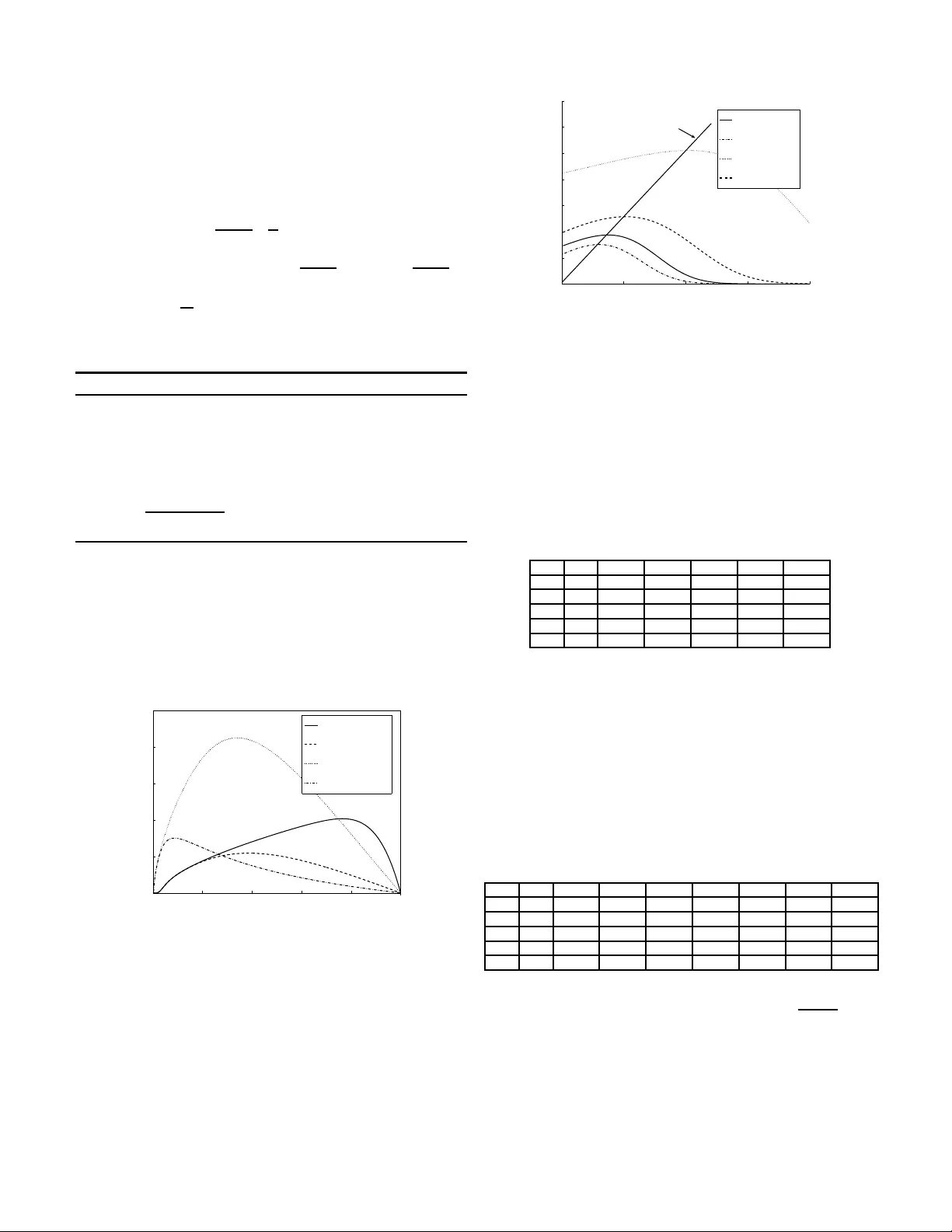
Distrib uted Opportunistic Scheduling F or Ad-Hoc Communications Under Noisy Channel Estimation Dong Zheng, Man-On Pun, W eiyan Ge, Junsha n Zhang and H. V inc ent Poor Abstract — Distributed opportunistic scheduling is studi ed for wireless ad-hoc networks, where many li nks contend fo r one channel using random access. In such networks, distributed op- portunistic scheduling (DOS) invo lves a process of joint channel probing and distributed schedulin g. It has b een shown that u nder perfect channel estima tion, the optimal DOS f or maximizing the network throughput i s a pure threshold policy . In this paper , thi s fo rmalism is generalized to explore DOS under noisy channel estimation, wh ere the transmission rate needs to be b acked off from th e estimated rate to reduce t he outage. It is shown that the optimal scheduling policy r emains to be threshold-based, and that the rate threshold turns out to be a function of t he variance of t he estimation error and be a functional of the backoff rate f unction. Since the opt imal backoff rate is intractable, a suboptimal linear backoff scheme that backs off the estimated signal-to-noise ratio (SNR) and hence the rate is proposed. The corresponding optimal backoff ratio and rate threshold can be obtain ed via an iterative algorithm. Finally , simulation r esults a re pro vided to illustrate the tradeoff caused by i ncreasing training time to imp ro ve channel estimation at the cost of probing efficiency . I . I N T R O D U C T I O N Channel-aware schedulin g fo r achieving rich diversities inherent in wireless communicatio ns has recently emerged as a promising techniqu e for improving spectr al ef ficiency in wireless networks. Most existing studies along this line requir e centralized schedu ling (see [ 5] and th e refere nces therein), and little work has been do ne on developing distrib uted algorithms to harvest d iv ersity gains for ad hoc com municatio ns. Unlike centralized cases, in ad ho c co mmunic ation networks, each link has no knowledge of other links’ channel conditions, mak- ing it very challengin g to carry o ut channel-aware distributed scheduling . Some initial steps have been taken by sev eral of the auth ors to develop distributed op portun istic scheduling (DOS) to rea p multiuser diversity an d time di versity in wirele ss ad hoc networks [7]. In DOS, a successful link pro ceeds to data transmission o nly if the observed chan nel cond ition is “good” ; otherwise, it m ay skip th e transmission, and let all the link s re- contend for the chann el. Intuiti vely speaking, because dif feren t Dong Zheng is with NextW ave Wi reless Inc., San Diego, CA 92130 (e- mail: dzheng@next wav e.com). Man-On Pun and H. V incent Poor are with the Department of Elec- trical E ngineer ing, Princet on Uni versity , Princeton, NJ 08544 (e-mail: mopun@princ eton.edu; poor@princ eton.edu). W e iyan Ge and Junshan Zhang are with the Department of Electri- cal Engineering, Arizona State Univ ersity , T e mpe, AZ 85287 (e-mail: W e iyan.Ge@asu.edu; Junshan.Zhang@asu.e du). This research was supported in part by the Croucher Foundatio n under a post-doct oral fello wship, in part by the U. S. National Science Foundati on under Grants AN I-02-38550, ANI-03-38807, CNS-06-25637, and CNS-07- 21820 and in part by Offic e of Nav al Research through Grant N00014-05-1- 0636. links in different time slots experience different chann el con - ditions, it is likely that after f urther prob ing, th e chan nel can be taken by a lin k with a better chann el con dition, resulting in possible high er thro ughp ut. In this way , th e mu ltiuser diversity across links and the time di versity across slots can be exploited in a jo int manner . Despite the insightfu l analy tical re sults repo rted in [ 7], its key assump tion is th at perfect chann el state inf ormation ( CSI) is known at the receiver/transmitter . Howe ver , in practical scenarios, channel conditio ns are often estimated using noisy observations. Theref ore, it is o f great interest to study DOS under noisy chan nel estimation. In c entralized schedu ling schemes, it has been shown that the estimated signal-to-noise ratio ( SNR) is always larger than the “actual SNR” [6]. Thu s, if the data w ere transmitted using the estimated rate, ther e would always be an outage. T o reduce the o utage pro bability , the transmission rate has to back off fro m the estimated rate. Therefo re, unlike the p erfect estimation ca se, the optim al scheduling policy hing es o n the b ackoff rate. In this work, we ge neralize [ 7] to the scenario with impe r- fect ch annel estimatio n and show that th e op timal sch edul- ing policy for the noisy channel e stimation case remains a threshold structure. Howe ver , the th reshold turns out to b e a function of the variance o f the chan nel estimation error, and further more, it is a function al of the backoff r ate function. Since the optimal backoff rate func tion is d ifficult to o btain, we p ropose a suboptimal linea r b ackoff scheme. W e show th at the correspon ding optima l backoff r atio and rate th reshold can be ob tained via an iterative numerical algorithm. Simulatio n results are provid ed to show that DOS achieves sign ificant throug hput gain in the p resence o f noisy channel estimation, especially in th e low SNR region. I I . S Y S T E M M O D E L A N D B AC K G RO U N D W e consid er a single-hop a d h oc network with M lin ks, where link m contend s f or the channel with p robab ility p m , m = 1 , . . . , M . A co llision model is assumed for rando m access, wh ere ch annel conten tion of a link is said to be suc- cessful if n o other link s transmit at the s ame time. Accordingly , the overall successful con tention p robab ility , p s , is then given by P M m =1 ( p m Q i 6 = m (1 − p i )) . It is clear that the number of slots (deno ted as K ) for a succ essful channel conten tion is a Geometric ran dom variable (r .v .) , i. e., K ∼ Geometr ic ( p s ) . Let τ denote the dura tion o f m ini-slot for cha nnel contention , and T the data transm ission time. It follows that the random duration cor respond ing to o ne r ound of successful chan nel contention is K τ , with expectation τ /p s . Let s ( n ) d enote the successful link at the n -th successful channel contention . The correspo nding recei ved signal is gi ven by: Y s ( n ) ( n ) = √ ρh s ( n ) ( n ) X s ( n ) ( n ) + µ s ( n ) ( n ) , (1) where ρ is the no rmalized rec eiv er SNR, h s ( n ) ( n ) is the channel co efficient for link s ( n ) , X s ( n ) ( n ) is the transm itted signal with E || X s ( n ) ( n ) || 2 = 1 and µ s ( n ) ( n ) is add iti ve white noise with i.i.d. C N (0 , 1) . T o simp lify the exposition, we consider a homogen eous network in which all links have the same chan nel statistics, and are subject to Rayle igh fading, i.e., h s ( n ) ( n ) follows a complex Gaussian distribution C N (0 , 1) . I n wha t follows, we drop the subscripts to simplify the notation and use h n to stand for h s ( n ) ( n ) where it is clear from th e context. Similarly , we use Y n , X n and µ n to denote Y s ( n ) ( n ) , X s ( n ) ( n ) and µ s ( n ) ( n ) . W e consid er the continu ous rate case, assuming tha t the instantaneou s rate is giv en b y the Sh annon ch annel capacity , i.e., R n = log(1 + ρ | h n | 2 ) nats/s/Hz , provided tha t the ch annel can be p erfectly estimated. In [ 7], we have studied DOS with p erfect CSI. Specifically , we have shown that the pr oblem c an be cast as a maximal rate of return problem in optimal stopp ing theor y [3], wher e the rate o f re turn is th e av erage n etwork thro ughpu t, x , an d is determined by the sto pping time N : x = E [ R N T ] E [ T N ] , (2) where T n , P n j =1 K j τ + T is the to tal system time inclu ding the contention time an d the data transmission time. N ote that N is a stopping time if { N = n } is F n -measurab le, where F n is th e σ -field generated by { ( ρ | h j | 2 , K j ) , j = 1 , 2 , . . . , n } . W e show that the optimal DOS m aximizing the throughp ut is g iv en by the optimal stop ping rule, N ∗ , that solves the maximal rate of r eturn problem in (2), i.e., N ∗ , arg max N ∈ Q E [ R N T ] E [ T N ] , x ∗ , sup N ∈ Q E [ R N T ] E [ T N ] , (3) where Q , { N : N ≥ 1 , E [ T N ] < ∞} . (4) It h as been shown in [7] that the o ptimal stopping rule N ∗ for DOS exists, and is given b y N ∗ = min { n ≥ 1 : R n ≥ x ∗ } . (5) Furthermo re, the m aximal throug hput x ∗ is an optimal th resh- old, and is th e unique solution to E ( R − x ) + = xτ p s T , (6) where R is a r . v . having the same distribution as R n . For example, if R n = log (1 + ρ | h n | 2 ) and h n has a comp lex Gaussian distribution C N (0 , 1) , it can b e shown that x ∗ = exp 1 ρ E 1 exp( x ∗ ) ρ p s δ , (7) where δ = τ /T , and E 1 ( x ) is the exponential inte gral function defined as E 1 ( x ) , R ∞ x exp( − t ) t dt . I I I . D O S U N D E R N O I S Y C H A N N E L E S T I M AT I O N Needless to say , in pr actical systems, h n has to b e estimated using tra ining signals (e.g. e mbedde d in the R TS p ackets). Let ˆ h n denote the estimatio n of th e chann el coefficient, and ˜ h n the estimation error . It follows that h n = ˆ h n + ˜ h n , (8) where ˆ h n and ˜ h n are zero-mean comp lex Gau ssian rand om variables. Suppo se that the chann el is estimate d usin g a mini- mum mean squ are error (MMSE)-b ased estimator . It follows, by the o rthogo nality prin ciple, th at E [ | h n | 2 ] = E [ | ˆ h n | 2 ] + E [ | ˜ h n | 2 ] . (9) Let β denote the variance of the estimation error . From (9) , we have that E [ | ˜ h n | 2 ] = β and E [ | ˆ h n | 2 ] = 1 − β . (10) T reating the estimatio n error a s n oise, the a ctual SNR at the receiver can be co mputed b y [6] λ n = ρ | ˆ h n | 2 1 + ρ | ˜ h n | 2 . (11) W e note that the n umerato r of (1 1), ρ | ˆ h n | 2 , is the esti- mated SNR. Ther efore, in contrast to the per fect CSI case where the sequence { ρ | h n | 2 , n = 1 , 2 , . . . } is u sed for dis- tributed schedu ling, in the noisy estimation case, { ρ | ˆ h n | 2 , n = 1 , 2 , . . . } serves as the b asis for distrib uted schedulin g. Follo wing [6], | ˆ h n | 2 and | ˜ h n | 2 can be normalized as ˆ λ n = | ˆ h n | 2 1 − β and z n = | ˜ h n | 2 β . (12) Note that bo th ˆ λ n and z n have the expo nential distribution with unit variance. Fu rthermo re, λ n in (11) can be rewritten as λ n = ρ ef f ˆ λ n 1 + αρ ef f z n , (13) where ρ ef f , (1 − β ) ρ and α , β 1 − β denote the “effective channel SNR” and “norm alized err or variance”, respectively . It can be shown the distribution of λ n giv en ˆ λ n is giv en by [6] f “ λ n | ˆ λ n ” = ˆ λ n αλ 2 n exp ( − 1 α ˆ λ n λ n − 1 ρ ef f !) I ˆ λ n λ n − 1 ρ ef f ! , (14) where I ( · ) is the indicator f unction . A. Op timal Stopping Ru le u nder Noisy Channel Estimation It is clear that th e actual SNR λ n is no grea ter th an the estimated SNR ρ ef f ˆ λ n . As a result, if the packet is transmitted at the estimated r ate log(1 + ρ ef f ˆ λ n ) , there would always be a chan nel o utage. Th erefore, the tran smission rate has to back off fro m th e estimate rate. Equiv alently , we can back off the estimated SNR ρ ef f ˆ λ to a “ nominated ” SNR λ c ( ˆ λ ) . According ly , the instantaneo us rate, R n , is given b y R n = log 1 + λ c ( ˆ λ n ) I λ c ( ˆ λ n ) ≤ λ n . (15) Along th e same line as in the perfect CSI case, for each giv en back- off rate function λ c ( · ) , maxim izing the average throug hput reduces to so lving the maximal rate of return problem in (2). Observe th at there ar e at least two ma jor differences b e- tween the p erfect estimation case and th e noisy ch annel esti- mation case. First, the stopping rule N is now defined over the σ -field F ′ n (instead o f F n ), generated by { ( ρ | ˆ h j | 2 , K j ) , j = 1 , 2 , . . . , n } . Second, the instantaneo us rate, R n , defined in (15), is now a ran dom variable, and is not perfectly kn own at time n . Howe ver , it can be shown that the structure of the optimal schedu ling strategy remain s th e same, except th at the random “rew ard” R n is replaced with its cond itional expec- tation, ¯ R n , E [ R n |F ′ n ] [3, Page 1.3] [1 ]. Mo re specifically , define Q ′ , { N ≥ 1 : { N = n } ∈ F ′ n , E [ T N ] < ∞} . (16) Analogou sly , define Q ′′ , { N ≥ 1 : { N = n } ∈ F ′′ n , E [ T N ] < ∞} , (17) where F ′′ n is the σ -field g enerated by { ( ¯ R j , K j ) , j = 1 , 2 , . . . , n } . W e hav e the following p roposition . Pr oposition 3 .1: sup N ∈ Q ′ E [ R N T ] E [ T N ] = sup N ∈ Q ′′ E [ ¯ R N T ] E [ T N ] . (18) The proo f f ollows from Prop ositions 2.3, 2.4, 2 .5 in [1] (with X n , Z n , W n in lieu of R n , ˆ λ n , ¯ R n ), and the pr oof in [7]. Due to space limitation, we omit the d etails h ere. As a result, Pr oposition 3 .1 indic ates that the op timal scheduling can be based solely o n ¯ R n , giv en by ¯ R n = E ˆ R n |F ′ n ˜ = log “ 1 + λ c ( ˆ λ n ) ” " 1 − ex p ( − 1 α ˆ λ n λ c ( ˆ λ n ) − 1 ρ ef f !)# , where we have used the fact that P λ c ( ˆ λ n ) ≤ λ n |F ′ n = P λ c ( ˆ λ n ) ≤ λ n | ˆ λ n due to the ind ependen ce of chan nel estimations. Based on the above discussion , we conclude that the optimal scheduling policy under noisy channel estimation is a pure threshold policy: N ∗ = min { n ≥ 1 : ¯ R n ≥ x ∗ } , (19) where the optimal th reshold x ∗ can be co mputed from (6), and hen ce, it is the un ique solution to the f ollowing fixed point equation: x = Φ( x, λ c ) , (20) where Φ( x, λ c ) , R ∞ ˆ λ ′ e − ˆ λ log (1 + λ c ) h 1 − ex p n − 1 α “ ˆ λ λ c − 1 ρ ef f ”oi d ˆ λ δ p s + e − ˆ λ ′ , (21) and ˆ λ ′ can be o btained from log “ 1 + λ c ( ˆ λ ′ ) ” " 1 − exp ( − 1 α ˆ λ ′ λ c ( ˆ λ ′ ) − 1 ρ ef f !)# = x. (22) B. Op timal Back off Rate Func tion It is clear from ( 20) that for a g iv en b ackoff rate f unction λ c ( · ) , the re is a cor respond ing op timal throug hput x ∗ . T here- fore, x ∗ is a function al o f λ c ( · ) , d enoted as x ∗ ( λ c ) . W e are interested in finding th e fu nction λ ∗ c ( · ) that max imizes x ∗ ( λ c ) , i.e., λ ∗ c = arg max λ c ∈ A x ∗ ( λ c ) , (23) where A is th e set o f the ad missible f unction s (for example, A can b e { λ c ( ˆ λ ) : λ c ( ˆ λ ) ≥ 0 , ∀ ˆ λ ≥ 0 } ) . Based o n the theory of calculu s of variations [4], prob lem (23) is a variatio nal pr oblem , an d th e fu nctions λ ∗ c ( · ) are called extr emals . However , unlike th e can onical calcu lus of variations pr oblems, in this pro blem, the function al x ∗ is no t explicitly define d on λ c . I nstead, th ey are connected through a fixed poin t equ ation. Fur thermor e, th e integral rang e in (2 1) is not fixed, but is a fun ction of λ c (cf. ( 22)). As a result, it is intractable to ch aracterize λ ∗ c . C. A Sub optimal Back off Rate Function In what f ollows, we propose a sub optimal backoff rate func- tion, which b acks off the estimated SNR b y a mu ltiplicative ratio σ , i. e., we set λ c ( ˆ λ ) = σ ρ ef f ˆ λ, (24) and 0 ≤ σ ≤ 1 . It fo llows from ( 24), ( 21) an d (22) that th e op timal th rough - put x ∗ is the solution to x = Φ( x, σ ) = » 1 − ex p − 1 αρ ef f „ 1 σ − 1 «ff– × log(1 + σ ρ ef f ˆ λ ′ ) e − ˆ λ ′ + exp “ 1 σ ρ ef f ” E 1 “ ˆ λ ′ + 1 σ ρ ef f ” δ p s + e − ˆ λ ′ , (25) where ˆ λ ′ = exp x 1 − exp − 1 αρ ef f ( 1 σ − 1 ) ff ! − 1 σ ρ ef f . (26) It is not difficult to show that x ∗ is a continuo us and differentiable function o f σ , a nd h ence, th ere exists an optimal backoff ratio σ ∗ such that σ ∗ = arg m ax σ x ∗ ( σ ) . (27) It can also b e shown that σ ∗ cannot be 0 or 1 (sin ce the correspo nding throughput is zero). Ther efore, the optimal ratio σ ∗ must satisfy the first order condition dx ∗ ( σ ∗ ) dσ = 0 . D. An Iterative Algorithm for Co mputing σ ∗ and x ∗ ( σ ∗ ) Due to the comp licated structu re of the fixed po int equation (25), it is no t feasible to character ize σ ∗ using the first or der condition . In wh at follows, we devise a n iterativ e algorith m instead using fractional o ptimization techniques [2]. Specifically , we define the following func tions: U ( σ, x ) , » 1 − ex p − 1 αρ ef f „ 1 σ − 1 «ff– × log( 1 + σ ρ ef f ˆ λ ′ ) exp( − ˆ λ ′ ) + exp „ 1 σ ρ ef f « E 1 „ ˆ λ ′ + 1 σ ρ ef f «ff , and V ( σ , x ) , δ p s + exp( − ˆ λ ′ ) , where ˆ λ ′ is defined in (26). The iterativ e algorithm is outlined in Algorith m 1, an d its conv ergence is established in [8]. Algorithm 1 Iterative Algo rithm fo r Computing { σ ∗ , x ∗ ( σ ∗ ) } States: x k , σ k Procedure: while | x k − x k − 1 | > ǫ do σ k − 1 = arg m ax 0 ≤ σ ≤ 1 { U ( σ , x k − 1 ) − x k − 1 V ( σ , x k − 1 ) } x k = U ( σ k − 1 ,x k − 1 ) V ( σ k − 1 ,x k − 1 ) end while I V . N U M E R I C A L R E S U LT S In this section , we provid e numer ical examples to illustrate the above results. Unless o therwise spec ified, we assume that τ , T , p , and M are chosen such that δ = 0 . 1 and p s = exp( − 1) . 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 Backoff Factor ( σ ) Throughput Φ (x, σ ) ρ =1, α =0.1 ρ =1, α =1 ρ =10, α =0.1 ρ =10, α =1 Fig. 1. Φ( σ ) vs. σ , x = 0 . 1 . Figure 1 dep icts Φ( x, σ ) as a fu nction of the backoff ratio σ . It can be seen that the average thr oughp ut is zer o at bo th σ = 0 and σ = 1 , and is ma ximized somewhere in between. Figure 2 depic ts Φ( x, σ ∗ ) as a function of x . Note th at the o ptimal throu ghpu t x ∗ is the solution to the fixed point equation x = Φ( x, σ ∗ ) . It can be o bserved th at x ∗ is an increasing function of ρ for a given α , and is a decrea sing function of α fo r a fixed ρ . I t can also be seen that the 0 0.5 1 1.5 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 x Φ ( x, σ *) ρ =10, α =1 ρ =1, α =1 ρ =10, α =0.1 ρ =1, α =0.1 φ (x)=x Fig. 2. Φ( x, σ ∗ ) vs. x estimation accura cy plays an imp ortant role in the throug hput perfor mance: when α decr eases from 1 to 0 . 1 , the performance improves over 150% for ρ = 10 . In T able I, we examine th e co n vergence of the iterative algorithm I with α = 1 . As expected, x ( n ) appro aches to x ∗ usually within a few iterations. T ABLE I C O N V E R G E N C E B E H AV I O R O F T H E I T E R A T I V E A L G O R I T H M , α = 1 . ρ x 0 x 1 x 2 x 3 x ∗ σ ∗ 0.5 0.5 0.177 0.246 0.254 0.254 0.407 1 0 .5 0.254 0.299 0.301 0.301 0.285 2 0 .5 0.306 0.335 0.336 0.336 0.182 5 0 .5 0.344 0.363 0.364 0.364 0.090 10 0.5 0.358 0.374 0.374 0.374 0.049 T able I I compar es the conver gence behavior of the iterative algorithm with different err or variance α and ρ = 1 . When the error variance is large, the iterative alg orithm needs mor e iterations to conv erge. Mo reover , the backoff ratio σ would decrease as α increa ses. This can be further obser ved in Fig. 3. It indicates th at when the e stimation erro r is large, the transmitter would back off m ore to avoid chan nel outage. T ABLE II C O N V E R G E N C E B E H AV I O R O F T H E I T E R AT I V E A L G O R I T H M , ρ = 1 . α x 0 x 1 x 2 x 3 x 4 x 5 x ∗ σ ∗ 0 0.5 0.604 0.610 0.610 1.00 0.1 0.5 0.514 0.514 0.514 0.753 1 0.5 0.254 0.299 0.301 0.301 0.285 2 0.5 0.109 0.201 0.217 0.218 0.218 0.155 5 0.5 0.004 0.091 0.120 0.122 0.123 0.123 0.054 T able I II illustrates the th rough put g ain, g = x ∗ − x L x L , as a function of ρ , where x L = Φ(0 , σ ∗ ) is the average th roug hput obtained by the schemes without using optimal schedu ling. It can be seen th at the throu ghput gain is more sig nificant in the low SNR region, and is a decr easing fu nction of ρ . In T able IV, we illustrate the thro ughp ut gain as a f unction of α . Note that α = 1 / (1 − β ) − 1 is an increasing function of β . 0 1 2 3 4 5 0 0.2 0.4 0.6 0.8 1 Normalized Error Variance ( α ) Backoff Factor ( σ ) ρ =0.5 ρ =1 ρ =5 Fig. 3. Back off factor σ as a function of normaliz ed error v ariance α T ABLE III T H R O U G H P U T G A I N O F D O S , α = 1 . ρ 0.5 1 2 5 10 100 x ∗ 0.254 0.301 0.336 0.364 0.374 0.385 x L 0.185 0.224 0.254 0.278 0.288 0.298 g ( ρ ) 37.3% 34.3% 32.3% 30.9% 29 .8% 29.2% As expected, when the n ormalized noise variance α incr eases, the o ptimal throug hput x ∗ decreases, as well as the x L . Howe ver , it is interesting to ob serve that the th rough put g ain increases in stead. The ratio nale be hind is that the p erfor mance of th e scheme s tha t do not use optim al schedu ling “suffers” more than that of the d istributed opportu nistic schedu ling in the presence of n oisy channel estimation. T ABLE IV T H R O U G H P U T G A I N O F D O S , ρ = 0 . 5 . α 0 0.01 0.1 1 2 5 x ∗ 0.384 0.378 0.352 0.254 0.197 0.118 x L 0.284 0.279 0.259 0.186 0.143 0.085 g ( α ) 35.2% 35.5% 35.9% 36.6% 37.8% 38.8% W e also examine the perfo rmance of distributed oppor- tunistic sched uling as a fun ction of the training time τ . According to linear e stimation theory , it has been shown that the er ror variance β and th e train ing time τ have the following relationship [8]: β = 1 ρτ + 1 . (28) Using ( 28) in the simu lation, we plo t thro ughp ut perform ance of the distributed opp ortunistic sche duling as a function of the trainin g time τ in Fig . 4. It is clear that th ere exists an optimal train ing time which balan ces the tr adeoff between better estimation accuracy and lo ss of transmission time. It can also be observed that wh en th e average SNR ρ increa ses, the optimal training time d ecreases. V . C O N C L U S I O N In this paper, we h av e g eneralized the study in [7] to in vestigate distributed op portun istic schedu ling under no isy 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Probing duration ( τ ) Optimal throughput ( Φ ( x * , σ * ) ρ =1 ρ =2 ρ =5 ρ =10 β = 1 ρτ +1 Fig. 4. Throughput vs. training time τ channel estimation. For such cases, we h av e propo sed th at the transmission rate bac ks off on the estimated r ate so as to reduce t he outage probability . W e ha ve sh owed that the optimal scheduling policy has a threshold structur e, but the thresho ld turns ou t to be a fun ction of th e variance of the e stimation error, an d is a fu nctional of the b ackoff r ate func tion. Since the optimal b ackoff is analytically intractable, we have prop osed a suboptim al line ar sch eme that b acks o ff on th e estimated SNR (a nd hen ce the rate). The correspo nding optimal ba ckoff ratios and rate thr esholds can be obtain ed u sing an iterative algorithm based on fractional maximization. Simulation results indicate that DOS still achiev es sig nificant throug hput gain in the presence of no isy channel estimation, especially in the low SNR region . In addition, we h av e ob served that the p erform ance loss of DOS due to the imperfe ct channe l estimation is less th an that of the schemes that do n ot use channel- aware scheduling , indicating th at th e d evised DOS is more robust against noisy channel e stimation. R E F E R E N C E S [1] D. Assal, L. Goldstein, and E. Samuel-Ca hn, “ A statistica l version of prophet inequali ties, ” Annals of Statisti cs , vol. 26, pp. 1190–1197 , 1998. [2] D. P . Bertsekas, Nonline ar P r ogra mming . Belmont , MA: Athena Scienti fic, 1995. [3] T . Ferguson, Optimal Stoppi ng and Applicati ons . av aila ble at http:/ /www .math.ucla .edu/ ˜ tom/Stopping/Contents.html, 2006. [4] I. Gelfan d and S. Fomin, Calculus of V aria tions . Engle wo od Clif fs, NJ: Prentic e-Hall, 1963. [5] X. Qin and R. Berry , “Exploit ing multiuser div ersity for medium access control in wireless networks, ” in P r oc. IEEE INFOCOM’03 , San Fran- cisco, CA, Mar . 2003. [6] A. V akili, M. Sharif, and B. Hassibi, “The effe ct of channel estimation error on the throughput of broadca st channe ls, ” in P r oc. IEEE Int’l Conf. Acoust. Speech Signal Pr ocess , T oulouse, France, May 2006. [7] D. Zheng, W . Ge, and J. Zhang, “Distribut ed opportunisti c scheduling for ad-hoc communications: An optimal stopping approach, ” in Proc . ACM Mobihoc 2007 , Montreal, Canada, Sep. 2007. [8] D. Z heng, M.-O. Pun, W . Ge, J. Zhang, and H. V . Poor , “Distrib uted opportuni stic scheduling for ad hoc communicat ions with imperfec t channe l information, ” Submitte d to IEEE T ransacti ons on W ir ele ss Com- municati ons , 2007.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment