Measuring the Complexity of Self-organizing Traffic Lights
We apply measures of complexity, emergence and self-organization to an abstract city traffic model for comparing a traditional traffic coordination method with a self-organizing method in two scenarios: cyclic boundaries and non-orientable boundaries. We show that the measures are useful to identify and characterize different dynamical phases. It becomes clear that different operation regimes are required for different traffic demands. Thus, not only traffic is a non-stationary problem, which requires controllers to adapt constantly. Controllers must also change drastically the complexity of their behavior depending on the demand. Based on our measures, we can say that the self-organizing method achieves an adaptability level comparable to a living system.
💡 Research Summary
The paper investigates how to quantify and compare the dynamical complexity of traffic‑signal control strategies using information‑theoretic measures of emergence (E), self‑organization (S), and complexity (C). The authors employ an abstract city‑traffic model based on elementary cellular automata (ECA) where each street is an ECA governed by rule 184 for normal motion, rule 252 for red‑light stopping, and rule 136 for preventing vehicles from entering a red‑light street. The model is deterministic, discrete in time and space, and conserves vehicle density ρ.
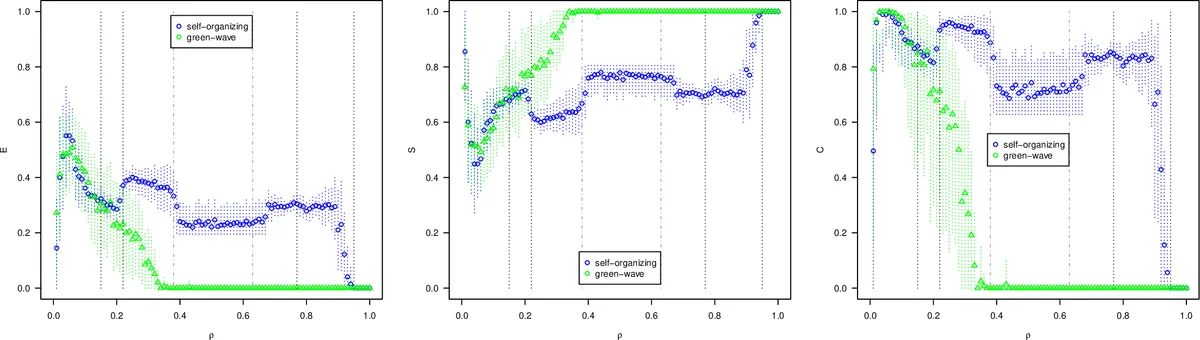
Two control methods are examined. The conventional “green‑wave” approach synchronizes all lights with a common period and phase offset; its switching pattern is perfectly periodic, yielding E = 0, S = 1, and C = 0. The alternative is a self‑organizing (SO) method previously developed by the authors. It consists of six local rules that each intersection evaluates every tick: (1) count approaching/queued vehicles within distance d and switch when a threshold n is exceeded, (2) enforce a minimum green time u, (3) keep a few vehicles close to a green light from switching, (4) give priority to a red‑light direction when the green side is empty, (5) switch to red if a stopped vehicle is detected a short distance e beyond the green light, and (6) switch both directions to red when blockages occur on both sides. Higher‑numbered rules override lower‑numbered ones, allowing the system to react to both low‑ and high‑density situations.
The authors run extensive simulations on a 10 × 10 grid (each street 800 m, cell = 5 m, time step = 1/3 s). Densities ρ range from 0.01 to 1.0 in 100 steps, with 50 random initializations per density (total 5 000 runs). Two boundary conditions are considered: (i) cyclic (standard ECA) and (ii) non‑orientable (Möbius‑strip/Klein‑bottle) where exiting vehicles re‑enter from a different direction, destroying long‑range correlations. For each run, the second half of 10 000 steps is used for statistics.
Performance is evaluated via average vehicle speed v and flux J = v·ρ. The SO method consistently outperforms the green‑wave across all densities, approaching the theoretical optimum flux (J_max = 0.25) especially in the “full‑capacity intermittent” phase. The green‑wave collapses into gridlock at moderate densities because its fixed phase cannot accommodate changes in vehicle speed.
Complexity measures are computed on three time series: (a) intervals between light switches at an intersection, (b) intervals between vehicles crossing an intersection, and (c) intervals between vehicles on a street. Emergence is defined as Shannon information I (base‑10 logarithm), self‑organization as S = 1 − I, and complexity as C = 4·I·(1 − I), which normalizes C to
Comments & Academic Discussion
Loading comments...
Leave a Comment