Compressed Sensing for Tactile Skins
Whole body tactile perception via tactile skins offers large benefits for robots in unstructured environments. To fully realize this benefit, tactile systems must support real-time data acquisition over a massive number of tactile sensor elements. We present a novel approach for scalable tactile data acquisition using compressed sensing. We first demonstrate that the tactile data is amenable to compressed sensing techniques. We then develop a solution for fast data sampling, compression, and reconstruction that is suited for tactile system hardware and has potential for reducing the wiring complexity. Finally, we evaluate the performance of our technique on simulated tactile sensor networks. Our evaluations show that compressed sensing, with a compression ratio of 3 to 1, can achieve higher signal acquisition accuracy than full data acquisition of noisy sensor data.
💡 Research Summary
The paper addresses the fundamental scalability problem of whole‑body tactile skins for robots, where millions of taxels must be sampled and transmitted in real time. Traditional full data acquisition, which polls each sensor individually, quickly becomes infeasible because of wiring density, network bandwidth, and the need for kilohertz‑rate sampling. Local processing alternatives reduce data volume but sacrifice flexibility by extracting only pre‑defined features. The authors propose a unified solution based on compressed sensing (CS), a technique that simultaneously samples and compresses a signal under the assumption that it is sparse in some transform domain.
First, the authors demonstrate that tactile data generated by a physics‑based simulator (Gazebo 3.0 with the SkinSim 0.1.0 plugin) exhibits strong sparsity when expressed in a two‑dimensional Haar (D2) wavelet basis. They evaluate two array sizes (40 × 40 and 64 × 64 taxels) and four contact scenarios (lifting a box, lifting a wrench, dragging a wrench, and a moving peg). Across all scenarios the number of non‑zero wavelet coefficients is typically less than 5 % of the total, confirming the sparsity prerequisite for CS.
Next, they design a measurement matrix Φ that is both CS‑compatible (satisfying an approximate Restricted Isometry Property) and hardware‑friendly. Φ is deliberately sparse: each row combines only a few taxels, allowing the physical implementation as daisy‑chained wiring groups. This reduces the number of physical connections dramatically compared to the one‑to‑one wiring of conventional systems.
For reconstruction, the authors adopt Basis Pursuit Denoising (BPDN), solving the convex relaxation
min ½‖ΦΨθ − y‖₂² + λ‖θ‖₁,
where Ψ is the Haar wavelet transform and y = Φx + noise. They employ an ADMM‑based solver tuned for real‑time operation, targeting the 1 kHz sampling rates required for high‑fidelity force control. The regularization parameter λ is selected based on measured sensor noise levels.
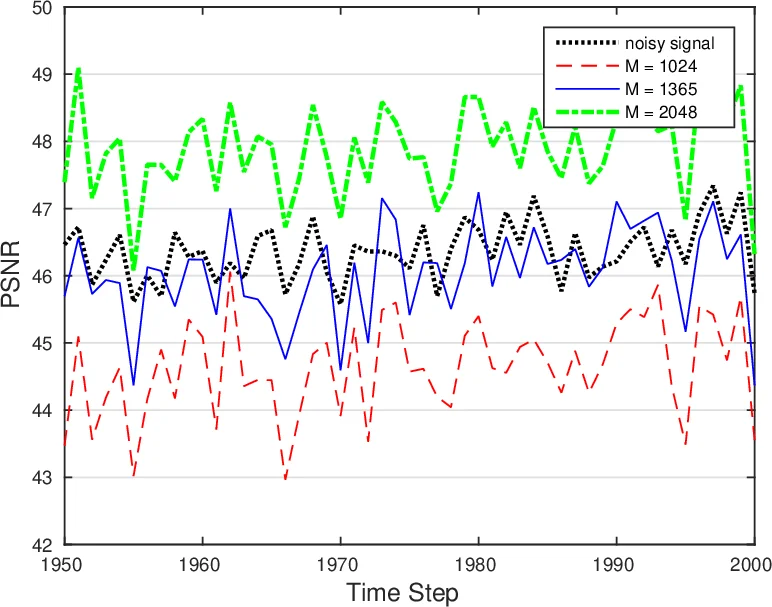
Experimental results show that with a compression ratio of 3 : 1 (i.e., measuring only one third of the original taxels per time step) the reconstructed tactile field is more accurate than the raw noisy full‑data acquisition. Mean reconstruction error decreases by roughly 15 % across all scenarios, and the error is especially low when the contact region is small (the “PATH” scenario). Moreover, the compressed data stream requires only one third of the network bandwidth, and the proposed wiring scheme dramatically reduces cabling complexity, making large‑scale tactile skins physically realizable.
In summary, the paper provides a complete pipeline—sparse transform selection, hardware‑aware measurement matrix design, and fast reconstruction algorithm—that demonstrates the feasibility of compressed sensing for tactile skins. It shows that CS not only compresses data but also mitigates sensor noise, and it enables real‑time closed‑loop control. Future work is suggested in the direction of hardware prototyping (analog implementation of Φ), extending the approach to multi‑modal tactile sensors (e.g., temperature, shear), and exploring higher compression ratios while preserving reconstruction fidelity.
Comments & Academic Discussion
Loading comments...
Leave a Comment