Approximation algorithms for the two-center problem of convex polygon
Given a convex polygon $P$ with $n$ vertices, the two-center problem is to find two congruent closed disks of minimum radius such that they completely cover $P$. We propose an algorithm for this problem in the streaming setup, where the input stream is the vertices of the polygon in clockwise order. It produces a radius $r$ satisfying $r\leq2r_{opt}$ using $O(1)$ space, where $r_{opt}$ is the optimum solution. Next, we show that in non-streaming setup, we can improve the approximation factor by $r\leq 1.84 r_{opt}$, maintaining the time complexity of the algorithm to $O(n)$, and using $O(1)$ extra space in addition to the space required for storing the input.
💡 Research Summary
The paper addresses the two‑center problem for a convex polygon P with n vertices: find two congruent closed disks of minimum radius that together cover the entire polygon. The authors propose algorithms for both a streaming setting, where the polygon’s vertices arrive one by one in clockwise order, and a non‑streaming (offline) setting, where the whole input can be stored.
In the streaming model the algorithm maintains only four extreme points: the vertices with minimum x, maximum x, minimum y and maximum y. These four points define an axis‑aligned bounding rectangle R that exactly encloses P. The rectangle is split vertically into two equal halves R₁ and R₂. For each half the algorithm computes the smallest enclosing circle; because the halves are congruent the two circles have the same radius
r = √(L² + 4W²) / 4,
where L and W are the length and width of R (L ≥ W). The algorithm outputs r as the radius of the two disks. The authors prove a lower bound ρ on the optimal radius r_opt using two geometric arguments: (i) any covering pair of disks must also cover the longest line segment inside P, giving ρ ≥ L/4; (ii) any covering pair must also cover a triangle inside P, giving ρ ≥ ℓ/2 where ℓ is the smallest edge of that triangle. Since r/ρ ≤ 2 in both cases, the streaming algorithm is a 2‑approximation. The algorithm runs in O(n) time (a single pass) and uses O(1) additional space, which is optimal for a streaming solution.
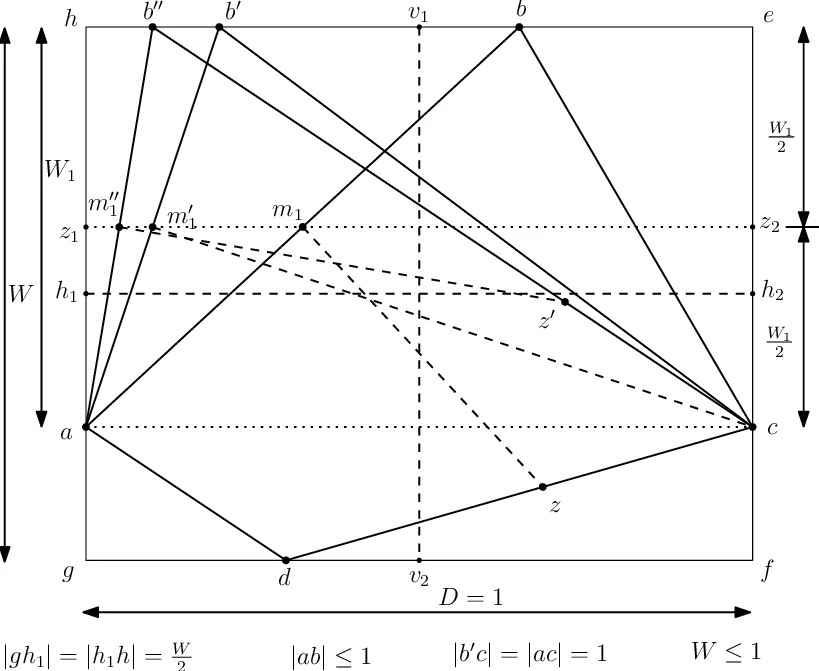
When the streaming restriction is lifted, the authors refine the analysis to obtain a better approximation factor. They still compute the same bounding rectangle R, but now they consider the “worst‑case” convex sub‑polygon Π that is exactly covered by R. Any convex polygon covered by R contains a minimal convex sub‑polygon that is either a quadrilateral, a triangle, or a degenerate diagonal of R. The authors perform a case‑by‑case geometric analysis of these possibilities.
If the aspect ratio satisfies 0 < W/L ≤ √3/2, the longest diagonal of the quadrilateral is at least L, so ρ ≥ L/4 and the approximation factor remains ≤ 2. For the more challenging range √3/2 < W/L ≤ 1, they identify an inscribed triangle whose smallest side ℓ can be expressed in terms of L and W, and they show that ℓ/2 provides a tighter lower bound. By carefully bounding ℓ they prove that r/ρ ≤ 1.84 in this regime. The degenerate cases (Π being a triangle or a diagonal) are shown to be covered by the same analysis.
Thus, in the offline setting the algorithm still runs in O(n) time, uses only O(1) extra memory beyond the input storage, and guarantees a 1.84‑approximation to the optimal radius.
The paper’s contributions are threefold: (1) it introduces the first streaming algorithm for the two‑center problem on convex polygons with a provable 2‑approximation; (2) it improves the approximation factor to 1.84 in the offline setting while preserving linear time and constant extra space; (3) it provides a systematic geometric framework that reduces the analysis of arbitrary convex polygons to a finite set of extremal quadrilaterals and triangles inside a bounding rectangle.
The authors also discuss related work, noting that previous results focused on point sets rather than polygonal regions, and that exact algorithms for polygons have higher polynomial or logarithmic factors. Their work therefore fills a gap by offering fast, memory‑efficient approximations for a geometric covering problem with direct applications in facility location, sensor placement, and network design. Future directions suggested include extending the approach to k ≥ 3 centers, handling non‑convex polygons, and empirical evaluation on real‑world datasets.
Comments & Academic Discussion
Loading comments...
Leave a Comment