Quantized Multimode Precoding in Spatially Correlated Multi-Antenna Channels
Multimode precoding, where the number of independent data-streams is adapted optimally, can be used to maximize the achievable throughput in multi-antenna communication systems. Motivated by standardization efforts embraced by the industry, the focus…
Authors: Vasanthan Raghavan, Venu Veeravalli, Akbar Sayeed
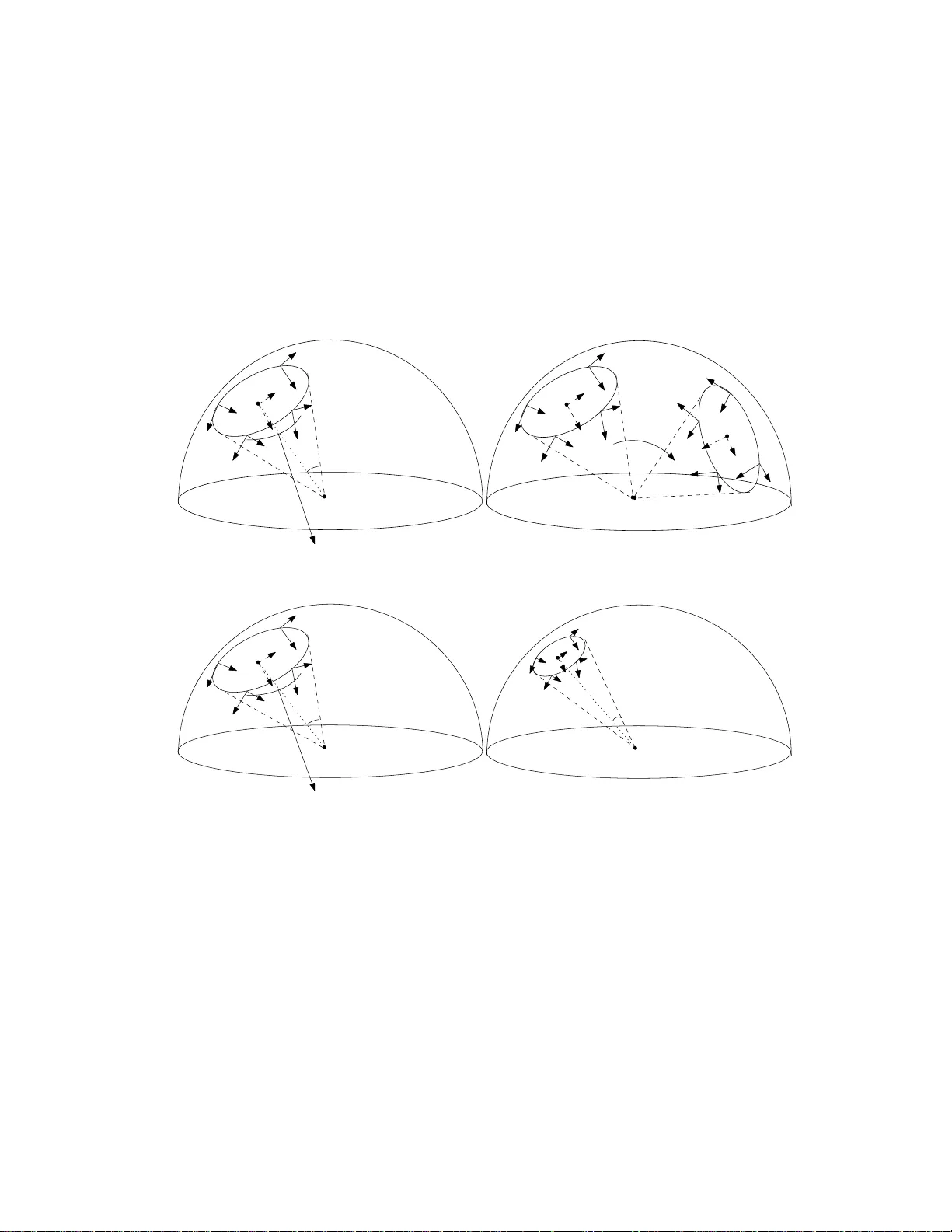
1 Quantized Multimode Precoding in Spatial ly Correlate d Multi-Antenna Channels V asanthan Ragha va n, V enugopal V . V eera v alli ∗ , Akbar M. Sayeed Abstract Multimode precod ing, where the number of independen t data-streams is adap ted op timally , can be used to maximize the achievable thr ough put in multi-antenn a co mmun ication systems. Mo tiv ated by standardizatio n efforts embraced by the ind ustry , the fo cus of this work is on systematic precod er design with realistic a ssumptions on th e spatial corr elation, channel state in formatio n (CSI) at the tra nsmitter and the receiver , and implem entation co mplexity . For spatial correla tion o f the channel matrix, we assume a general channel model, based on physical principles, that has been v erified by many recent measurement campaign s. W e also assume a coh erent receiver and knowledge of the spatial statistics at the transmitter along with the presence of an ideal, low-rate feedback lin k fro m the receiver to the transmitter . The reverse link is u sed for codebo ok-ind ex feedback and the goal of this work is to construct prec oder codebo oks, adaptable in respo nse to the statistical in forma tion, such that the achiev able throug hput is significantly enh anced over that o f a fixed, non- adaptive, i.i.d. cod ebook design. W e illustrate how a codebook of semiunitary precoder matrices localized around som e fixed center on the Grassmann manifold can be skewed in r esponse to the spatial c orrelation v ia low-complexity maps that can rotate and scale subma nifolds on the Grassmann m anifold. Th e skewed codeb ook in co mbinatio n with a low- complexity statistical p ower allocatio n schem e is then shown to brid ge the gap in p erform ance between a pe rfect CSI b enchmar k an d an i.i.d. codebo ok design . Index T erms Limited feedback communication , quantized feedback, adaptiv e codin g, lo w-comp lexity signaling, MIMO systems, chann el state informa tion at transmitter, pr ecoding , mu ltimode signaling V . Raghav an and V . V . V eeravalli are with the Coordinated Science Laboratory and the Department of Electrical and Computer Engineering, University of Illinois at Urbana-Champaign, Urbana, IL 61801 US A. A. M. S ayeed is with the Department of Electrical and Compu ter Engineering, University of W isconsin-M adison, Madison, WI 537 06 USA. Email: vasanthan raghavan@i eee.org, vvv@uiuc.edu, akbar@engr.wisc.e du. ∗ Corresponding author . This work was partly supported by the NSF under grant #CCF-0049089 through the Univ ersity of Illinois, and grant #CCF- 043108 8 through the Uni versity of Wiscon sin. This paper was presented in part at the 41st Annual Conference on Information Sciences and Systems, Baltimore, MD, 2007. 2 I . I N T RO D U C T I O N Research over the last de cade has firmly es tablished the utility o f multiple antenna s at the trans mitter and the rece i ver in providing a mecha nism to increase the reliability of signal reception [1], o r the rate of information transfer [2], o r a co mbination of the two. The focus o f this work is on ma ximizing the achiev able rate under certain c ommunication models tha t are motiv ated by wireless sys tems in practice. In particular , we a ssume a limited (or qu antized) feed back mod el [3] with pe rfect ch annel state information (CSI) at the rece i ver , p erfect statistical knowledge of the chan nel at the transmitter , a nd a low-rate feedback link from the rece i ver to the trans mitter . In this setting, the funda mental p roblem is to determine the optimal signaling / feedba ck scheme that maximizes the average mu tual information gi ven a statistical description of the chan nel, s ignal-to-noise ratio ( SNR ), the number of antennas , an d the quality of limited feedback . A low- complexity approach t o solving this problem is to first determine the r ank of the optimal precoder as a function of the statistics, SNR , a nd the quality of fee dback . The des ign of the optimal scheme is then, in principle, es sentially the same as that of a fixed ran k limited feed back prec oder whos e rank is adapted optimally . Motiv a ted by this line of rea soning, the ma in theme of this work is the c onstruction of a sy stematic, ye t low-complexity , limited fee dback preco ding sc heme (of a fixed rank) that results in significantly improved pe rformance over an ope n-loop 1 scheme . T owards this goal, we conside r a simple block f ading / narrowband setup where spatial correlation i s modeled by a mathematically tractable channel decompo sition [4]–[6], an d includes as spe cial c ases the we ll-studied i.i.d. model [2], the s eparable correlation mode l [7], and the virtua l repr esentation framework [8], [9]. Furthermore, we also as sume that the power-constrained input s ignals come from s ome discrete c onstellation se t where as the de coder is as sumed to have a simple, linear a rchitecture like the minimum mean-squa red error ( MMSE ) rec eiv er . While prec oding has been studied extensively under the i.i.d. model [10]–[18], cons iderable theoretical gaps exist in the limited feedba ck se tting. The extreme c ase of limited feedba ck bea mforming ha s b een studied in the i.i.d. s etting where the isotropicity 2 of the do minant right singular vector of the cha nnel can be le veraged to un iformly quantize the space of unit-normed be amforming vectors, a prob lem well-studied in mathematics literature as the Grass mannian line packing (GLP) problem [19], [20]. 1 There is no correlation information at the t ransmitter in an open-loop scheme. That i s, the channel i s assumed to be i.i.d. and an i.i.d. codebook design is used. 2 Isotropic means tha t the dom inant right singular v ector is equally likely to point along any direction in the ambient transmit space. This ambient space of all possible right si ngular vector(s) is referred to as the Grassmann manifold. P recise definitions are provided later in the paper . 3 Alternate constructions bas ed on V e ctor Q uantization (VQ) / Random V ector Quantization (R VQ ) a re also poss ible [21], [22]. Spatial correlation, howev er , skews the iso tropicity o f the right sing ular vector , and he nce poses a fundamen tally more challenging prob lem. While VQ code books can be constructed for the correlated chan nel case, the construction suffers from h igh computational complexity and the codebo ok has to be reconstructed from sc ratch ev ery time the statistics change , thus rendering VQ-type solutions imprac tical. Re cently , be amforming cod ebooks that can be easily adapted to statistical variation (with lo w-complexity transformations) hav e been proposed [23]–[25]. The other e xtreme, lim ited feedba ck spatial mu ltiplexing, ha s also been studied [26], [27]. In the intermediate setting 3 of rank - M p recoding, under the i.i.d. assumption, the isotropicity p roperty of the do minant right singu lar vector of the ch annel extends to the subspa ce sp anned b y the M -dominant right singula r vectors thereby allowi ng a Grassmann ian subspa ce pac king solution [28]. In the c orrelated case, the fundamental challenge on how to non -uniformly quantize t he space of M -dominant right singular vectors remains the same as in the b eamforming case . However , unlike the beamforming ca se, it is not ev en clear h ow a codebook designe d for i.i.d. ch annels can be ske wed in response to the c orrelation. In fact, us ing an i.i.d. codebo ok design in a correlated c hanne l ca n lead to a drama tic degrada tion in performance (se e F igs. 3 and 4). Our main g oal here is to cons truct a systematic semiunitary 4 precoder c odebo ok that is ta ilored to the spatial correlation, a nd is ea sily adapta ble in respon se to a cha nge in statistics. Th e heuristic be hind our construction comes from o ur previous study of the asy mptotic performance of the statistical prec oder [29]. W e showed in [29] that the performance of the statistical precoder is closes t to the optimal p recoder when the numbe r of dominant transmit e igen values is equal to the ran k o f the prec oder , these do minant eigen values a re well-cond itioned, a nd the receive c ovari ance matrix is also well-conditioned. A channe l satisfying the above conditioning prope rties is said to be matched to the commun ication s cheme. Thus , while limited (or even p erfect) feedbac k can only lead to ma r ginal performanc e improvement in matched channels , in the case of mismatched channels where the relati ve gap in performance between the s tatistical and the o ptimal precoders is usually lar ge, the potential benefits of limited feedbac k are more significant. This study [29] sug gests that sp atial c orrelation orients the d irecti vity of the M -do minant right singular vectors of the c hannel towards the statistically domina nt sub space s and hence , a n on-uniform qua ntization of the local neighbo rhood aroun d the statistically dominan t s ubspac es is necess ary . The rea lizability of 3 Here, 1 < M < min( N t , N r ) with N t and N r denoting the tr ansmit and the receiv e antenna dimensions. 4 An N t × M matrix X with M ≤ N t is said to be semiunitary i f it satisfies X H X = I M . 4 such a non-uniform quan tization with lo w-complexity , as well as its ad aptability , are ea sed by ma the- matical map s that ca n rotate a root code set (or a subma nifold) centered at some arbitrary location on the Grassmann manifold G ( N t , M ) towards an arbitrary c enter a nd scale it arbitrarily . Our design includes a statistical compone nt o f dominant M -dimensional su bspace s of the transmit covari ance ma trix, a c omponen t corresp onding to loc al quantization a round the statistical c omponen t, and an R VQ compon ent which ca n be con structed with low-complexity . In this c ontext, our co nstruction mirrors and generalizes our rec ent work in the bea mforming case [25]. By co mbining a se miunitary codebo ok (of a s mall eno ugh ca rdinality) with a low-complexity power alloca tion s cheme that is related to statistical w aterfilling, we sho w via numerical studies that significant performance gains can be achiev ed and the ga p to the perfec t CS I s cheme can be bridged considerab ly . Organization: The system setup is introduced in Section II. In Section III, we introduce the notion of mismatched cha nnels wh ere limited feedbac k precod ing res ults in significa nt p erformance improvement. In S ection IV, limited fee dback cod ebook s tha t enh ance performance are prop osed and in Se ction V, mathematical ma ps are constructed to realize the se des igns with low-complexity . Numerical studies are provided in Section VI with a discuss ion of our results and conclus ions in Section VII. Notation : The M -dimensional identity matrix is den oted by I M . W e us e X ( i, j ) and X ( i ) to d enote the i, j -th a nd i -th diagon al entries of a matrix X . In more complicate d settings ( e.g., when the ma trix X is represented a s a p roduct or sum of many matrices), we use X i,j to de note the i, j -th entry . The complex conjuga te, conjugate transpos e, regular transpose and in verse operations are denoted by ( · ) ⋆ , ( · ) H , ( · ) T and ( · ) − 1 while E [ · ] , T r ( · ) a nd det( · ) s tand for the expectation, the trace and the determinan t operators, resp ectiv ely . The t -dimen sional complex vector spa ce is den oted by C t . W e use the ordering λ 1 ( X ) ≥ · · · ≥ λ n ( X ) for the eigenv alue s of a n n × n -dimen sional Hermitian matrix X . T he notations λ max ( X ) a nd λ min ( X ) also stand for λ 1 ( X ) and λ n ( X ) , res pectively . I I . S Y S T E M S E T U P W e c onsider a communication mo del with N t transmit a nd N r receiv e anten nas where M ( 1 ≤ M ≤ min( N t , N r ) ) inde pende nt d ata-streams a re us ed in s ignaling. Tha t is, the M -dimensional inp ut vector s is precode d into an N t -dimensional vector via the N t × M precoding matrix F and transmitted over the channe l. The discrete-time base band s ignal mo del used is y = H F s + n (1) where y is the N r -dimensional recei ved vector , H is the N r × N t channe l matrix, and n is the N r - dimensional z ero mean, unit variance a dditi ve white Gaus sian noise. 5 A. Channe l Model W e assume a block fading, narrowband mo del for the c orrelation of the channe l in time and freque ncy . The main empha sis in this work is on chan nel correlation in the s patial (antenn as) domain. Th e sp atial statistics of H depe nd on the ope rating frequency , physica l propa gation en vironment which controls the angular sp reading fun ction and the path distrib ution, antenn a geometry (arrange ment a nd sp acing) etc. It is well-known that Ra yleigh fading (zero me an comp lex Gaus sian) is an accurate mode l for H in a non line-of-sight se tting, a nd henc e the complete s patial statistics are de scribed by the s econd -order momen ts. The most gen eral, mathematically tractable spatial correlation mod el is a ca nonical de composition 5 of the c hanne l a long the transmit and the re ceiv e covariance ba ses [4]–[6]. In the canonica l model, we assume that the auto- and the cross-co rrelation matrices on both the transmitter a nd the receiv er sides have the sa me eigen-ba ses, and therefore we can dec ompose H as H = U r H ind U H t (2) where H ind has inde penden t, b ut n ot ne cessa rily identically distributed entries, and U t and U r are un itary matrices. T he transmit a nd the receive covariance ma trices are g i ven by Σ t = E H H H = U t E H H ind H ind U H t = U t Λ t U H t Σ r = E HH H = U r E H ind H H ind U H r = U r Λ r U H r (3) where Λ t = E H H ind H ind and Λ r = E H ind H H ind are d iagonal. Un der certain s pecial ca ses, the mode l in (2) redu ces to s ome well-known s patial c orrelation models [4]: • T he c ase of idea l chan nel modeling a ssumes that the entries o f H ind are i.i.d. standard complex Gaussian random variables [2]. The i.i.d. mo del c orresponds to an extreme wh ere the channe l is characterized by a single independ ent p arameter , the co mmon variance. • Wh en H ind is assumed to h ave the form 1 √ ρ c · Λ 1 / 2 r H iid Λ 1 / 2 t with H iid an i.i.d. channel matrix and the chan nel power ρ c = T r( Λ t ) = T r( Λ r ) , the cano nical mode l reduc es to the often-studie d normalized separab le c orrelation framework whe re the correlation of chan nel entries is in the form of a Krone cker product o f the transmit a nd the receive covariance matrices [7]. The se parable mode l is described by no mo re than N t + N r independ ent parameters corresponding to the eige n values { Λ t ( i ) } a nd { Λ r ( i ) } . 5 This model i s referred to as the “eigenbeam / beamspac e model” in [5] and i s used in capacity analysis in [6]. 6 • Wh en uniform linear a rrays (ULAs) of anten nas are used at the transmitter a nd the receiver , U t and U r are well-approximated by discrete Fourier transform (DFT) matrices a nd the can onical mod el reduces to the virtual repres entation framewor k [8], [9], [30]. In con trast to the ge neral model in (2), the virtual represe ntation offers many a ttracti ve prope rties: a) The matrices U t and U r are fixed and independ ent of the unde rlying scattering en vironment and the spatial eigenfunc tions are beams in the virtual directions. Thus, the v irtual representation is phys ically more intuiti ve tha n the general model in (2 ), b) It is only ne cessa ry that the entries of H ind be indepe ndent, but no t necess arily Gaussian , a criterion important as antenna dimensions increase , a nd c) The case of s pecular (or line-of-sight) s cattering can b e ea sily incorporated with the virtual representation framework [30]. In contrast to the se parable mod el, the virtual representation can support up to N t N r independ ent parameters correspon ding to the variances of { H ind ( i, j ) } . While performance analysis is tractable in the i.i.d. ca se, it is u nrealistic for a pplications where large antenna spacings or a rich scattering en vironmen t a re not pos sible. E ven thoug h the sepa rable mo del may be an accu rate fit u nder certain c hanne l conditions [31], defi ciencies ac quired by the separa bility property result in misleading estimates of system p erformance [4], [32], [33]. Th e read ers are referred to [5], [32 ], [34 ] for more d etails on how the canonica l / virtual mod els fit mea sured d ata b etter . B. Channe l State Information If the fading is sufficiently slow , perfect CSI at the rec eiv er is a reas onable a ssumption for practical communication architectures that use a “ training followed by signa ling” model. Even in scena rios where this may not b e true ( e.g., a highly mo bile se tting), the p erformance with imperfect CSI at the rece i ver can be app roximated reasona bly a ccurately by the perfect CSI case a long with a n SNR -offset correspon ding to channe l es timation. Thus in this work, we will as sume a perfec t CSI (c oherent) rec eiv er architecture. Howe ver , o btaining perfec t CSI at the transmitter is us ually difficult due to the high c ost ass ociated with channe l feedbac k / rev erse-link training 6 . On the o ther hand , the statistics of the fading proc ess change over muc h longe r time-sca les a nd can be learned reliably a t both the end s. In addition, rece nt techno logical a dvances have enab led the possibility of a few bits of qua ntized cha nnel information to be fed ba ck from the recei ver to the transmitter at 6 In case of Time-Di vision Duplex ed (TDD) systems, the reciprocity of the forward and the rev erse links can be explo ited t o train the channel on the rev erse link. In case of F requenc y-Div ision Duplexed (FDD) systems, the channel i nformation acquired at the recei ver has to be fed back. 7 regular intervals. The most common form of quantized ch annel information is via a limited feedback codebo ok C of 2 B codewords known at b oth the e nds. In this setup, the receiver e stimates the chann el at the start of a coh erence block and computes the index of the optimal codeword from the co debook C for that realiza tion of the chann el a ccording to some o ptimality c riterion. It then fee ds ba ck the index of the optimal cod ew ord with B bits over the limited feedb ack link which is ass umed to have negligible delay and ess entially no errors (since B is usua lly small). Th e transmitter exploits this information to co n vey useful data over the remaining s ymbols in the c oherence bloc k. C. T ransce iver Architectur e The trans mitted vector Fs (see (1)) has a power c onstraint ρ . Ass uming that the input symbols s ( k ) have e qual energy ρ M , the precoder matrix satisfies T r( F H F ) ≤ M . Non -linear maximum lik elihood (ML) decoding o f the transmitted d ata symbols using knowledge o f H at the receiver is optimal. Howev er , ML decoding suffers from exponential co mplexity , in both an tenna dimensions and coh erence len gth. Thus in practice , a simple linea r rece i ver architecture like the M MSE receiver is preferred. W ith this rece i ver , the s ymbol corresp onding to the k -th data-stream is recovered by projecting the received signal y on to the N r × 1 vector g k = r ρ M ρ M HFF H H H + I N r − 1 Hf k (4) where f k is the k -th c olumn of F . Th at is, the recovered s ymbol is b s ( k ) = q ρ M g H k y . The sign al-to- interference-noise ratio ( SINR ) a t the output of the linear filter g k is SINR k = ρ M | g H k Hf k | 2 g H k ρ M P i 6 = k Hf i f H i H H + I N r g k = 1 I M + ρ M F H H H HF − 1 k ,k − 1 (5) where the secon d e quality follows from the Ma trix In version Lemma. The outputs b s ( k ) are p assed to the de coder a nd we ass ume separate en coders / de coders for each d ata- stream, as well as inde penden t interleav ers and de-interleavers, whic h red uces the correlation amo ng the interference terms at the outputs of the recei ver filters. The performance measure is the mutual information between s and b s . As suming that the interference plus noise at the ou tput of the linear fi lter has a Gauss ian distrib ution, wh ich is true with Gauss ian inputs an d is a good approx imation in the non-Gaus sian s etting when { M , N t , N r } a re lar ge, the mutual information is giv en by I ( s ; b s ) = M X k =1 log 2 (1 + SINR k ) = − M X k =1 log 2 I M + ρ M F H H H HF − 1 k ,k . (6) 8 When p erfect CSI is av ailable at the trans mitter a nd n o co nstraints are imposed on the structure of the precoder , the optimal preco der F perf is chan nel diago nalizing and is of the form F perf = e V H Λ 1 / 2 wf where V H Λ H V H H is an e igen-decomp osition o f H H H with the e igen values arranged in non-increas ing o rder , e V H is the N t × M principal s ubmatrix of V H , and Λ wf is an M × M matrix with n on-negativ e entries only a long the leading diagona l and these entries are obtained by waterfilling. In this setting, the mutual information is g i ven by I perf ( s ; b s ) = M X k =1 log 2 1 + ρ M Λ H ( k ) Λ wf ( k ) . (7) The optimality of F perf with o ther choices of objectiv e functions is also k nown; see [10]–[18]. D. Limited F eedb ack F ramework The focu s of this work is o n understanding the implications of pa rtial CSI a t the transmitter on the performance of the precoding sche me. In particular , there exists a c odeboo k of the form C = { F i , i = 1 , · · · , 2 B } whe re F i is an N t × M pre coder matrix with T r( F H i F i ) ≤ M . The most ge neral structure for F i is F i = V i Λ 1 / 2 i where V i is an N t × M se miunitary matrix a nd Λ i is an M × M non-negativ e definite, diag onal power a llocation matrix. While the structure of the o ptimal limited fee dback c odeboo k of B bits c ould in volve allocating some fraction of B to the power allocation compon ent of F i , numerical studies indicate that the degradation in pe rformance is minimal when Λ i is c hosen to be fixed (sa y , Λ stat with T r( Λ stat ) ≤ M ), but designed a ppropriately , as a function of SNR if ne cess ary , so that it can be easily adapted to s tatistical vari ations without recourse to Mon te Carlo method s 7 . Moti vated by this heu ristic, in this work, all the B bits in limited feedback are alloca ted to quan tize the eigenspa ce of the c hanne l. That is, the cod ebook is C = { V i : V H i V i = I M } an d the index of the codeword that is fed back is j ⋆ = arg m ax j ( − M X k =1 log 2 I M + ρ M Λ 1 / 2 stat V H i V H Λ H V H H V i Λ 1 / 2 stat − 1 k ,k ) . (8) Although computing j ⋆ is straightforward, the des ign of an op timal codeboo k to ma ximize I ( s ; b s ) s eems dif ficult. Here, we adopt a su boptimal s trategy wh ere the goal is to maximize the average projec tion of the be st c odeword from C on to e V H . T owards the precise mathema tical formulation of this problem, we need a metric to de fine dis tance between two se miunitary matrices. 7 The design of Λ stat will be dealt with in Sec. IV. 9 E. Distance Metrics and Spher ical Caps on the Gras smann Manifold W e now recall some well-known facts about the Grassma nn manifold. The unit sph ere in C N t , also k nown as the uni-dimensional 8 complex Stiefel manifold S t( N t , 1) , is defined as St( N t , 1) = x ∈ C N t : k x k = 1 . The in vari ance of any vector x to transformations of the form x 7→ e j φ x in the above defin ition is incorporated by con sidering vectors modulo the a bove map. The p artitioning of St( N t , 1) b y this equiv alence map res ults in the u ni-dimensional Gras smann manifold G ( N t , 1) . In sho rt, the Grassman n manifold c orresponds to a linear subs pace in a n Euclidean space . Similarly , the clas s o f N t × M semiun itary matrices forms the M -dimensional complex Stiefel manifold S t( N t , M ) and points on the M -dimensiona l comp lex Grassmann ma nifold G ( N t , M ) are ide ntified mo dulo the M -dimension al unitary space . A literature su rvey o f packings on G ( N t , 1) [35 ]–[37] shows that many distance metrics are eq uiv a lent to the dot p roduct metric which is the mos t natural metri c from an engineering perspective. The dot product metric is defined as d ( x 1 , x 2 ) = q 1 − | x H 1 x 2 | 2 . Using this distan ce metric, for a ny γ < 1 , we can define a sp herical cap with center o a nd radius γ (as a subman ifold on G ( N t , 1) ) as the ope n set O ( o , γ ) = { x ∈ G ( N t , 1) : d ( x , o ) < γ } . A sphe rical cap on G ( N t , 1) induces a spherical cap o n St( N t , 1) via the equ i valence pa rtitioning ge nerated by the map x 7→ e j φ x . In the more general M > 1 ca se, there is n o uniqu e distance metric extension. While various we ll- defined dis tance metrics c an be pursued , we will focus on the pr ojection 2 -norm d istance metric [36]. Here, the distance b etween two N t × M se miunitary matrices V 1 and V 2 is defined as d pro j , 2 ( V 1 , V 2 ) = λ max V 1 V H 1 − V 2 V H 2 . (9) A particular cho ice o f the distance metric is not extremely critical in precoder optimization since code - books des igned with different choices of distance metrics result in nea r -identical performance [28], [29 ]. In add ition to this fact, the follo wing lemma sho ws that the projection 2 -norm metric is a ttracti ve by being a na tural generalization o f the dot product metric. Lemma 1: In the M = 1 case , the p rojection 2 -norm metric reduces to the sta ndard d ot produ ct metric. Pr o of: Let v 1 and v 2 be two un it-normed N t × 1 vectors. T hen, the projection 2 -norm d istance between v 1 and v 2 is defined a s d pro j , 2 ( v 1 , v 2 ) = λ max v 1 v H 1 − v 2 v H 2 . W e can write the matrix within the λ max ( · ) op eration as [ v 1 v 2 ] [ v 1 − v 2 ] H . Since the non -tri via l e igen v alues o f a matrix produ ct AB 8 Uni-dimensional because i ts definition is based on the norm of an N t × 1 vector . 10 are the same as those of BA , we ne ed the largest eigen v alue of X = v H 1 − v H 2 h v 1 v 2 i = 1 v H 1 v 2 − v H 2 v 1 − 1 . (10) Expanding the characteristic e quation of X , det( X − λ I 2 ) = 0 , we have λ 2 = 1 − | v H 1 v 2 | 2 . Using the positiv e root for λ max , the lemma follows immediately . Pr o position 1: W e now state some properties of the projection 2 -norm metric: 1) 0 ≤ d pro j , 2 ( V 1 , V 2 ) ≤ 1 , 2) More precisely , d pro j , 2 ( V 1 , V 2 ) = q 1 − λ min ( V H 1 V 2 V H 2 V 1 ) , and 3) E quality in the lower b ound of 1) occ urs if and o nly if V 1 = V 2 on G ( N t , M ) wh ile e quality is possible in the upper bound if a nd only if λ min ( V H 1 V 2 V H 2 V 1 ) = 0 . Pr o of: The proof is provided in three parts. 1) Us ing the fact that V 1 V H 1 − V 2 V H 2 is He rmitian and its trace equals z ero, we see tha t λ max ( V 1 V H 1 − V 2 V H 2 ) < 0 is impossible. For the upp er bo und, no te that λ max ( V 1 V H 1 − V 2 V H 2 ) ≤ λ max ( V 1 V H 1 ) = λ max ( V H 1 V 1 ) = 1 . (11) 2) W e the nee d the following result [38] that helps in computing the determinant o f partitioned ma trices. Lemma 2: If X , Y , Z and W a re n × n ma trices a nd W is in vertible, we have det X Y Z W = det( X − YW − 1 Z ) · det( W ) . (12) Using t he above fact and t he t rick (in Lemma 1) o f r ewri ting the eigen values of AB in terms of eigen values of BA , 2 ) follows tri v ially . 3) If d pro j , 2 ( V 1 , V 2 ) = 0 , then it is easy to s ee tha t V 1 V H 1 = V 2 V H 2 from which we no te that V 1 = V 2 V H 2 V 1 . Observe that V H 2 V 1 is M × M an d u nitary , an d h ence, V 1 = V 2 on G ( N t , M ) . The other d irection of the statement follo ws tri vially . Both the directions of the up per b ound follow from the expression in 2). The trick in proving L emma 1 and statement 2) in Prop. 1 is useful and will be used aga in in the construction of the sc aling map (see Append ix B). Once a choice of distanc e metric has bee n se ttled, the definition of a spherical cap with ce nter O a nd radius γ (as a subma nifold on G ( N t , M ) ) follows naturally as the op en set O ( O , γ ) = { X ∈ G ( N t , M ) : d pro j , 2 ( X , O ) < γ } . Th e code book design problem can 11 now be simply stated as: Construct C = { V i , i = 1 , · · · , 2 B } s . t . E H min i =1 , ·· · , 2 B d pro j , 2 ( V i , e V H ) is minimized . W e n ow work towards a systematic codeb ook cons truction for this problem. I I I . M A T C H E D V E R S U S M I S M A T C H E D C H A N N E L S The case of unstructured precoding with genie -aided perfect CS I was summarized in Sec. II-C wh ich resulted in F perf = e V H Λ 1 / 2 wf . The c onstruction o f e V H , as we ll as Λ wf , necess itates the tracking of the channe l ev olution which is dif ficult. T o av oid this problem an d to reduce the complexity o f precoding , the follo wing s tructured precoding was introduce d in [29]. • Wh en the precoder is a ssumed to be structured a s F = VΛ 1 / 2 stat with V an N t × M s emiunitary matrix, and Λ stat an M × M fixed, ra nk - M power allocation matrix, the optimal choice of V under perfect CSI is e V H . T his optimality is as sured for many diff erent clas ses of ob jectiv e functions apart from the case o f max imizing mu tual information. When only statistical information is avail able a t the transmitter , the optimal c hoice of V is V stat where V stat is a se t of M d ominant e igen vectors of Σ t , the transmit covariance matrix. W e call thes e two sc hemes optimal and s tatistical s tructured pr ecoding sche mes , respec ti vely . • W e study the performance loss be tween the se two sche mes as a func tion of the chann el statistics. When one antenn a dimens ion g rows to infinity a t a rate faster than the other 9 , whic h we refer to as the relative antenna a symptotics c ase, cha nnel ha rdening leads to c on vergence o f the right singular values of the channe l to the e igen v alues of Σ t and he nce, ensu res that the statistical sc heme performs near-optimally . This conc lusion gene ralizes p rior results in the beamforming case where statistical beamforming is shown to b e near-optimal in the relati ve anten na asy mptotics setting [25]. • F urther , for any rea sonab ly large (but fixed) value of antenna dimensions, the relative performance loss between the two schemes is mi nimized by the follo wing choice of statistics: 1) The set of transmit eigen values { Λ t ( i ) } c an be partitioned into two c omponen ts: a well-conditioned compo nent of M dominant eigenv alue s, and the remaining N t − M transmit e igen values a re ill-conditioned away from the dominant set, a nd 2) The set of rec eiv e eigenv alue s { Λ r ( i ) } are we ll-conditioned. In particular , if T r( Σ t ) = T r( Σ r ) = N t N r , the structure of Λ t and Λ r that minimizes performance loss is Λ t (1) = · · · = Λ t ( M ) = N t N r M , Λ t ( M + 1) = · · · = Λ t ( N t ) = 0 , and Λ r (1) = · · · = Λ r ( N r ) = N t . 9 That is, when N t N r → 0 or ∞ as { N t , N r } → ∞ . 12 Such a chan nel is s aid to be matched to the prec oding sc heme. On the other extreme, statistical structured precoding in a n i.i.d. cha nnel leads to very high performance loss wh en c ompared with the optimal sc heme. Thus, an i.i.d. chann el is misma tched to the precod ing sc heme. More important to note is that any feedbac k (limited or otherwise) is helpful only in mismatch ed ch annels and only when the transmit and the receive dimens ions are propo rtionate. Th is c onclusion is a generalization of our earlier b eamforming result [25]. The rea ders are referred to [29] for de tails. Hen ceforth, the foc us will be on mismatche d chan nels primarily because the potential to bridge the performance ga p between the statistical and pe rfect CSI scheme s is maximum. Our goal is to co nstruct a sy stematic, s tatistics-depende nt code book (of a fixed size 2 B ) tha t e nsures this bridging. I V . Q UA N T I Z E D F E E D B AC K D E S I G N S T O B R I D G E T H E P E R F O R M A N C E G A P In c ontrast to the i.i.d. c ase where the isotropicity of the right singular subs pace o f the chann el lead s to a design [28] b ased on Gras smannian subsp ace p ackings [37], spatial c orrelation skews this isotropicity and poses fundamen tal challenge s. Th e s tudy of statistical precoding moti vates the following heu ristic in the correlated ca se. While the asy mptotic chan nel hardening (and the con seque nt nea r -optimality of statistical precoding ) do es not ca rry over wh en N t and N r are small or wh en they a re proportionate, it is expected that the d istance between V stat and e V H is small o n average. Thus, when we have the freedo m to pick more than one codeword ( B > 0 ), the cod ew ords should correspo nd to a “ local qua ntization” of V stat . The notion o f loc al quantization w ill be ma de precise shortly . W e n ow des cribe the co debook design for limited feedbac k precoding. Our design is a multi-mode generalization of the beamforming code book proposed in [25], [39]. The dif ferences between the two scheme s lie in packing subspa ces, rather tha n lines, a nd in the choice o f an appropriate distance met- ric. For this, we introduce the no tion o f generalized e igen value s of subspac es of Σ t . Cons ider the family of su bspac es spanne d by M distinct eigenv ectors of Σ t . Note that there are N t M members in this family . For each such subspac e, we as sociate a generalized eigen v alue defined as the M -fold product of the corresp onding transmit e igen v alues. For examp le, if N t = 4 and M = 2 with the columns of U t denoted by u i , i = 1 , · · · , 4 , the six subs paces correspond to the 4 × 2 matrices: [ u 1 u 2 ] , [ u 1 u 3 ] , [ u 1 u 4 ] , [ u 2 u 3 ] , [ u 2 u 4 ] and [ u 3 u 4 ] . The ge neralized eigenv a lue correspond ing to [ u 1 u 2 ] is Λ t (1) Λ t (2) etc . Note that amo ng all the M -dimens ional subspa ces of Σ t , the s ubspac e span ned by V stat results in the la r gest gene ralized eigenv a lue. 13 The propo sed cod ebook design has three compon ents: 1) a statistical c omponen t, 2) local perturbation compone nts, and 3 ) a n R VQ compone nt. The c ardinalities of the se compone nts are de noted by N stat , N loc and N rvq with the feedback rate de fined b y B = log 2 ( N stat + N loc + N rvq ) . Statistical Componen t: While the distance be tween V stat and e V H , an instantaneou s realization of the M - dominant right sing ular vectors of the c hannel is expected to be sma ll on av erage, the precise probab ility distrib ution of this distance is determined by the sepa ration (gap) be tween the gene ralized eige n values of Σ t . For exa mple, if the first two do minant gen eralized eigen v alues are close to eac h other , there is a non- negligible probab ility for the event that the bes t q uantizer is the subspa ce whose gene ralized eigenv alue is the sma ller o f the two a nd h ence, the distan ce be tween V stat and the op timal prec oder cou ld be arbitrarily close 10 to 1 . On the o ther ha nd, if the largest ge neralized eigenv a lue of Σ t is muc h larger than the other generalized eigen values, the probab ility distribution o f this distanc e is concen trated around ze ro. Th us the ga p between the lar gest ge neralized e igen value and the other gen eralized eigen values heu ristically determines the cardina lity of the statistical comp onent, N stat . In our de sign, a threshold β is c hosen a p riori for the generalize d eigenv a lues and the s tatistical co mponent con sists of all M -dimens ional subspa ces su ch that their g eneralized eige n value exce eds the thresho ld. T hat is, the statistical co mponen t is the set S = n i : µ i µ 1 > β o where µ i are the M -fold g eneralized eigen values o f Σ t and µ 1 is the largest generalized eigen value. The cardinality of S is N stat . [ u 1 u 2 ] [ u 1 u 3 ] [ u 2 u 3 ] Fig. 1. Proposed Codebook Design for N t = 3 , M = 2 , and B = 3 with only the statistical and local components. Local Components : For the i -th member of the s tatistical c omponen t, we construct N i loc codewords so 10 Note from Prop. 1 that the distance b etween the first two dominant eigen-spaces of Σ t is 1 . This is b ecause λ min ( V H 1 V 2 V H 2 V 1 ) = 0 where V 1 and V 2 denote the first two dominant eigen-spaces. 14 that they are loca lized and well-packed around the correspo nding sta tistical codeword. While these local codewords can the oretically be design ed via VQ, we p rovide low-complexity alternati ves in Sec . V w here we also elaborate on the notions of localized and well-pack ed . The choice of N i loc is in prop ortion to the g eneralized eigen value of the s ubspa ce. The heuristic beh ind this choice is as follo ws: The larger the separation of the g eneralized eige n value µ 1 (corresponding to V stat ) from the next lar gest generalized eigen value or the more matched Σ t is, the lesser the relevance of the less -dominant subspa ces in terms of prec oding a nd he nce, the smaller the values of { N i loc } , i > 1 need to be. These N loc = P N stat i =1 N i loc codewords form the local compo nent of our codebo ok design. In Fig. 1 , we illustrate the design of a co debook with statistical and local compon ents where N t = 3 , M = 2 , N stat = 3 , N 1 loc = N 2 loc = 2 and N 3 loc = 1 . If U t = [ u 1 u 2 u 3 ] , then the three s tatistical transmit eigens paces w ith M = 2 are those sp anned by [ u 1 u 2 ] , [ u 1 u 3 ] and [ u 2 u 3 ] . The “directions” correspond ing to thes e subspa ces are symbolically represented in the fi gure with da shed lines . The first local compone nt consists of two codewords arou nd [ u 1 u 2 ] and so o n. Sinc e there are eigh t c odewords in our design, this c odebo ok can be parameterized with B = 3 bits. RVQ Component: If B is suf ficiently lar ge, the re is a need to refin e the q uantization of e V H . In this setting, N rvq , 2 B − N stat − N loc random c hanne l ma trices are gene rated according to the relationship in (2) and their M -dominant right singular vectors are used as the s emiunitary prec oder codewords in the R VQ co mponent. No te that the R VQ co mponent can be g enerated with low-complexity once the statistics are k nown perfectly . A. P ower Allocation It is preferred that the p ower allocation matrix Λ stat be o nly de penden t on the chann el s tatistics and be ea sily adaptable to statistical variations. Th e optimal choic e of Λ stat needs to be cons tructed via a Monte Ca rlo algorithm which is difficult to implement as well as adapt to s tatistical v ariations with low-complexity . As an alternativ e, we co nsider three low-complexity power allocations: 1) u niform power allocation ac ross the excited modes , 2) waterfilling ba sed on Λ t ( i ) , i = 1 , · · · , M , and 3) power allocation proportional to the transmit eigenv a lues. The last two schemes ha ve near -identical performances and are nea r -optimal in the low- SNR regime while un iform power allocation is more useful in the high- SNR regime. 15 B. Codeword Selection The rece iv er acquires the cha nnel information a t the start of a coh erence block a nd it computes the index of the op timal c odeword from the c odebo ok that maximizes the instantaneo us mutual information. The receiver then communica tes to the trans mitter the index of the optimal codeword with B bits. The transmitter uses the optimal c odeword along with an app ropriate power alloca tion to commu nicate over the remaining period in the c oherenc e block. θ V 2 V 3 V 4 V 5 d proj , 2 ( V 3 , V 4 ) ≥ γ V target d proj , 2 ( V 3 , V 4 ) remains same V 1 V 1 (a) θ V 2 V 3 V 4 V 5 d proj , 2 ( V 3 , V 4 ) ≥ γ d proj , 2 ( V 1 , V i ) scaled by α θ α V 1 V 1 (b) Fig. 2. (a) Rotation of a root codeset of semiunitary precoders { V i , i = 1 , · · · , 5 } with N t = 3 and M = 2 . The root codeset satisfies the l ocalization and well-packing properties described in Sec. V. The distance between any two precoders remains unchang ed after rotation. (b) Scaling of the root codeset by α . The position of V 1 remains unchanged after scaling. V . R OTA T I N G A N D S C A L I N G S P H E R I C A L C A P S O N G ( N t , M ) W e n ow propose mathema tical maps to en sure that the code book design propose d above can be realize d with low-complexit y . For this, we n eed the no tion of a r oot codes et. Le t R = { V i , i = 1 , · · · , N } be a 16 root code set 11 of N semiunitary matrices satisfying the following properties which are cha racteristic of a ‘good’ local qu antization: 1) Localization: The root codes et is loca lized (ce ntered) aroun d V 1 . That is, there exists a θ ∈ (0 , 1) such that d pro j , 2 ( V 1 , V i ) ≤ θ for all i 6 = 1 . The smaller the value of θ , the more localized a packing. W e o ften label V 1 as the center of the r oot c odese t . This is illustrated in Fig. 2 where a set of N = 5 precode rs form the localized root code set in the N t = 3 , M = 2 setting. 2) W e ll-P acking: The codewords in R are well-packed (well-separated). Tha t is, given so me γ ∈ (0 , γ max ( N t , M , N , θ )) , the minimum d istance of the packing d min ( R ) defin ed a s d min ( R ) , min i 6 = j d pro j , 2 ( V i , V j ) is lar ger tha n γ . The larger the value of γ , the we ll-packed R is. Henc e γ can a lso b e v iewed as a meas ure of the packing density . Here, γ max ( N t , M , N , θ ) is the max imum possible packing density 12 achiev able in the Grassma nn manifold G ( N t , M ) with N co dewor ds localized in a c ap of radius θ . Note that for any fixed cho ice of N t , M a nd N , it is intuiti ve to expe ct that γ max ( N t , M , N , θ ) d ecrease s as θ de creases . In other words, the a bove two properties are in some sense con flicting with a root code set that is more loca lized n eces sarily forced to have a sma ll pa cking de nsity and vice versa . Despite this apparen t dif ficulty , it is important to note that a packing with the above properties can always be constructed, eithe r via algebraic methods or via a vector quan tization [21], [22] approac h (that is, a brute force se arch via Monte Carlo-type a lgorithms). F urthermore, R need s to be c onstructed (of fline) just once, and once this has bee n don e, C can be designe d for any statistics starting from R . For this, we now show how mathema tical operations can be constructed to p erform the following two tasks: 1) Giv en a root c odese t R of N codewords with a p acking den sity γ and a target cen ter V ta rget , how can we c enter R around V ta rget without having to resort to a VQ-type codeb ook c onstruction again ? That is, w e seek a ma p to rotate the c enter o f R to V ta rget without changing the pa cking de nsity , an d 2) Giv en a root code set R centered aroun d V 1 with a pack ing de nsity of γ and some fixed α ∈ (0 , 1) , how can we sca le R so that the pac king dens ity of the res ultant codes et is αγ ? That is , we s eek a map to reduce the minimum d istance of R without ch anging its ce nter . While we develop such maps for spherical caps / su bmanifolds, we will state the res ults as applicab le to finite elemen t sub sets of G ( N t , M ) . But prior to that, we rec all resu lts from a recent work [40 ] where 11 W e use the t erm root codeset to indicate that the construction of C is rooted in the design of a ‘good’ R . 12 While the exact characterization of γ max ( N t , M , N , θ ) r emains an open problem f or general value s of N t , M , N and θ , some bounds have been established; see [19], [24], [36], [37] and references therein. 17 rotation and scaling maps to solve 1) and 2) (as above) have be en propo sed in the be amforming case ( M = 1 ). Th e rotation map is straightforward and is effected b y an approp riately cho sen u nitary matrix. In contrast to the rotation operation, the scaling ma p requires some c are due to the c onstraints of the space . For example, an o peration of the form x 7→ α x whe re α ∈ R y ields a vector tha t is not u nit-norm. It is to be no ted tha t both rotation and scaling maps are non-uniqu e. W e summarize the map of [40] in the follo wing lemma 13 for M = 1 . Lemma 3 (See [40]): Let R = { v i , i = 1 , · · · , N } be a root co deset in G ( N t , 1) with a pa cking density γ a nd ce nter v 1 . The ma p that e f fects the rotation of v 1 to v ta rget is given by r ( v i ) = U ta rget v i with U ta rget satisfying 14 v ta rget = U ta rget v 1 . For scaling b y α , we first define a rotation map r vertex generated b y a unitary ma trix U vertex that e f fects the rotation o f the center v 1 to v vertex = [1 , 0 , · · · , 0 ] T , a vertex of the u nit c ube. Th en, de fine a vertex sca ling map s vertex : O ( v vertex , γ ) 7→ O ( v vertex , αγ ) by s vertex [ r 1 e j θ 1 , r 2 e j θ 2 , · · · , r N t e j θ N t ] T = q 1 − α 2 (1 − r 2 1 ) e j θ 1 , α r 2 e j θ 2 , · · · , α r N t e j θ N t T (13) where we have deno ted the vector in the argument on the left side of the a bove equation in its p olar form. T he map s bf ( · ) defined as a c omposition s bf = r − 1 vertex ◦ s vertex ◦ r vertex results in s bf ( v i ) = v 1 q 1 − α 2 (1 − | v H 1 v i | 2 ) e j ∠ v H 1 v i + α v ⊥ 1 v ⊥ , H 1 v i . (14) It can be chec ked that s bf ( v 1 ) = v 1 on G ( N t , 1) . F urthermore, the inner p roduct of the seco nd term with v 1 is ze ro. Hen ce, d ( s bf ( v i ) , s bf ( v 1 )) = d ( s bf ( v i ) , v 1 ) = αd ( v i , v 1 ) for all i . The rotation and scaling maps to be proposed now generalize the result of [40 ] to the precoding scena rio, M > 1 . Theorem 1 : Le t R = { V i , i = 1 , · · · , N } be a root codese t centered aroun d V 1 with a pac king density γ . Let the N t × M s emiunitary matrix V ta rget be the desired center of the rotated codes et. Then, t he rotated codese t G is given by G = { G i , i = 1 , · · · , N } whe re G i = U V target U H V 1 V i with u nitary matrices U V 1 and U V target defined as U V 1 = V 1 V null 1 and U V target = V ta rget V null ta rget . Here, V null 1 and V null ta rget are N t × ( N t − M ) -dimensiona l repres entativ es of the null-spaces of V 1 and V ta rget , respectively . Pr o of: See Appendix A. 13 The readers are referred to [ 25] for details of the proof. 14 One possible choice of U target is U target = ˆ v target v ⊥ target ˜ h v 1 v ⊥ 1 i H where v ⊥ target and v ⊥ 1 refer t o matrix representati ves from the N t × ( N t − 1) dimensional null-space of v target and v 1 , respectiv ely . That i s, v ⊥ , H 1 v ⊥ 1 = I N t − 1 and v ⊥ , H 1 v 1 = 0 N t − 1 × 1 . 18 Note that there exists more than o ne b asis for the null-space and therefore the us age of the term “represen tati ve” in the statement of the theorem. T he lack of a uniqu e repres entativ e for the null-space is responsible for the n on-uniquen ess of the rotation map tha t can eff ect a desired rotation. Before we get into the most ge neral form o f the s caling map , we illustrate a special c ase of it so as to provide ins ights into the construction. As before, let R = { V i , i = 1 , · · · , N } b e a root codese t c entered around V 1 with a pa cking dens ity γ . Let V 1 = [ v 1 · · · v M ] where v i is an N t × 1 vector a nd is the i -th column of V 1 . Define the map s ( · ) by s ( V i ) = h v 1 v 2 · · · v M − 1 β v M + δ v M +1 i (15) where β = q 1 − α 2 1 − λ min V H 1 V i V H i V 1 , δ = α q 1 − λ min V H 1 V i V H i V 1 , and v M +1 is or- thogonal to V 1 (that is, v H M +1 V 1 = 0 1 × M ). W e illustrate three prope rties s atisfied b y s ( · ) which ensure s that it can scale su bmanifolds. Noting that v i , i = 1 , · · · , M + 1 a re orthonormal vectors in C N t and that β 2 + δ 2 = 1 , it is straightforward to c heck that s ( V i ) H s ( V i ) = I M . For s ( V 1 ) , no te tha t β = 1 and δ = 0 which resu lts in s ( V 1 ) = V 1 . Pr o position 2: W e also ha ve d ( s ( V 1 ) , s ( V i )) = αd ( V 1 , V i ) for any i 6 = 1 . Thus , s ( · ) induc es the scaling of R by α . Pr o of : Note that d ( s ( V 1 ) , s ( V i )) ( a ) = d ( V 1 , s ( V i )) = λ max ( V 1 V H 1 − s ( V i ) s ( V i ) H ) ( b ) = λ max ( v M v H M − ( β v M + δ v M +1 )( β v M + δ v M +1 ) H ) (16) where in (a) we have used s ( V 1 ) = V 1 and (b) follo ws from (15 ). Using the trick of Lemma 1, ob serve that the square of λ max in the above equation sa tisfies λ 2 max = 1 − | v H M ( β v M + δ v M +1 ) | 2 = 1 − β 2 = α 2 (1 − λ min ( V H 1 V i V H i V 1 )) . T he proof is complete b y n oting the value of d ( V 1 , V i ) from Prop. 1. The c hoice of v M +1 is not unique and it is no t clear whether the map in (15) is u nique modulo the choice o f v M +1 . Furthermore, n ote tha t when ( N t − M ) ≥ M , s ( V i ) c an be written as s ( V i ) = V 1 A i + V null 1 B i (17) where A i = diag([ 1 , · · · , 1 , β ] ) an d B i has on ly one n on-zero entry wh ich is at the ( M , M ) -th location and its value is δ . In Appe ndix B, we res olve the u niquenes s issu e and cons truct the mo st ge neral form of s ( · ) . W e a lso show tha t the mos t g eneral form o f s ( V i ) is of the form in (17) for a suitable choice of A i and B i . 19 A. Reduction to the Beamforming Construction of L emma 3 Cor ollary 1: In the sp ecial c ase of M = 1 , the sc aling map proposed in (15) (and extende d in Theorem 2 o f Ap pendix B) is a g eneralization o f the map p roposed in Lemma 3 (see (14)). Pr o of: F or the sake of simplicity , we deno te the map cons tructed in (15) as s gen ( · ) . W e write s gen ( · ) as s gen ( v i ) = √ λ i v 1 + √ 1 − λ i v null 1 where λ i = 1 − α 2 (1 − | v H 1 v i | 2 ) a nd v null 1 is an N t × 1 unit norm vector orthogon al to v 1 . W e now d raw a corresp ondenc e betwee n s bf ( · ) and s gen ( · ) . In Lemma 3, note tha t U vertex U H vertex = I N t which implies that v ⊥ 1 v ⊥ , H 1 = I N t − 1 . Using the fact that U H vertex U vertex = I N t , similarly we o btain v ⊥ , H 1 v ⊥ 1 = I N t − v 1 v H 1 . Using this in (14), we have s bf ( v i ) = q 1 − α 2 (1 − | v H 1 v i | 2 ) e j ∠ v H 1 v i v 1 + α ( v i − v 1 ( v H 1 v i )) (18) = p λ i e j ∠ v H 1 v i v 1 + α ( v i − v 1 ( v H 1 v i )) . (19) It is s traightforward but surprising to note that v i − v 1 ( v H 1 v i ) √ 1 −| v H i v 1 | 2 is both u nit norm an d orthogonal to v 1 . Further , note tha t √ 1 − λ i = α q 1 − | v H i v 1 | 2 . By setting v i − v 1 ( v H 1 v i ) √ 1 −| v H i v 1 | 2 as the represe ntati ve of v null 1 in the ge neral framework, we see that s bf ( · ) ca n be o btained up to a p hase term. And s ince we operate on the Grassman n man ifold which is impervious to right multiplication by terms of the form e j θ , we have proved the corollary . B. Low-Complexity Gene ration of Local Componen ts W e now illustrate how the theory o f rotation and s caling maps can be used to construct precoding codebo oks with low- complexity . Root Codes et Ge neration: A root c odese t that satisfies the localization an d well-pack ing conditions as described above is con structed via VQ. Th e numb er of co dew ords in the root codes et is larger than N 1 loc so as to ens ure that any loca l compone nt has a ca rdinality smaller than that of the root c odese t. Furthermore, since the scaling ma p can only ensure that the output pa cking is more loca lized tha n the input pac king, we need to p ick θ sufficiently large, but s maller than 1 . T he quan tity γ max ( N t , M , N , θ ) correspond ing to the choic es of N t , M , N an d θ is determined via Monte Carlo techn iques an d s ome γ is chosen in the interval (0 , γ max ( N t , M , N , θ )) . Local Compo nents: For ea ch member of the statistical compon ent, we rotate the root codese t (via the rotation map of Theorem 1) to the N t × M ma trix c orresponding to the subsp ace of Σ t in the s tatistical compone nt. Then, each rotated c odese t is s caled by a s hrinking factor α i , µ i µ 1 . That is, we sc ale ea ch rotated co deset in proportion to the generalized eigenv a lue o f that su bspac e. From each rotated c odese t of N cod ew ords, we retain N i loc , i = 1 , · · · , N stat codewords. The he uristic be hind the cho ice of N i loc 20 has be en explaine d in the previous sec tion. The same h euristic c an be us ed to justify the choice of α i as well. C. Exploiting the General Struc tur e of the Scaling a nd Rotation Maps W e now delve into why a ge neral form of the maps in Ap pendix B is use ful. In many p ractical systems, it is d esired that the precoder codebo ok has more structure so as to ensure implementation ease. For example, two commonly desired properties are: 1) Bounded Gain P ower Amp lifier Ar chitectur e whe re we require max V i ∈ C max mn | V i ( m, n ) | min mn | V i ( m, n ) | ≤ η . (20) The above condition is use ful in e nsuring that the power amplifiers use d in the radio link chain are not dri ven to their ope rational limits. Th e most general form of the rotation and s caling maps allows on e to search for a c odeboo k tha t satisfies the a bove property in a ddition to the loc alization an d well-pac king properties, and 2) Recursive Codebook Struc tur e where a co debook of rank - N small can be gene rated from a co debook o f rank - N large (with N large > N small ) by retaining only a s ubset o f N small columns from ev ery precoder in the rank - N large codebo ok. This property is desired so a s to minimize the algorithmic comp lexity of generating a family of c odebo oks of diff erent ranks on the fly . The low-complexity property of the propos ed map s and the offline ge neration of the roo t c odese ts o f d if ferent ranks ensure that this issue is redunda nt with our codeb ook design. Thus, we strongly ge neralize the maps of [40 ] and as a by -product observe that even in the M = 1 case, a rich family of ma ps can effect the sca ling operation other than (14). Add itional structure in the codebo ok can also be accommoda ted to ease implementation c omplexity . V I . N U M E R I C A L R E S U L T S W e now illustrate via numerical stud ies the performanc e ga ins p ossible with o ur codebo ok construction and the conse quent bridging of the gap be tween statistical and optimal precod ing. In the fi rst study , we consider a 4 × 4 channel und er the separa ble model with Λ t = diag ([14 . 98 0 . 50 0 . 2 6 0 . 2 6]) and Λ r = diag ([15 . 5 0 . 25 0 . 15 0 . 10]) . This choice ens ures tha t the trans mit / recei ve covariance matrices are both ill-conditioned and with M = 2 , note that the chann el is not matched to the prec oder . W e first generate a root c odese t of N = 4 co dewords with θ ≈ 0 . 76 and γ ≈ 0 . 75 v ia VQ. Let { u i } be the column vec tors of U t . The c odebo ok used for B = 1 s atisfies N stat = 1 with the codeword corresponding 21 −15 −10 −5 0 5 10 15 20 25 0 5 10 15 20 25 SNR (dB) Average Mutual Information (bps/Hz) Perfect CSI B = 0 (Statistics) B = 1 B = 2 B = 4 B = 4 (Grassmannian) −10 −5 0 5 10 15 20 25 10 −4 10 −3 10 −2 10 −1 10 0 SNR (dB) Raw Bit Error Rate Perfect CSI B = 0 (Statistics) B = 1 B = 2 B = 4 B = 4 (Grassmannian) (a) (b) Fig. 3. (a) A verage mutual information with Gaussian inputs i n a 4 × 4 mi smatched channel f ollo wing a separable model. T wo data-streams are used in signaling and a limi ted feedback codebook designed along t he principle elucidated in Sec. IV is used. (b) Error probability performance wit h the same codeboo k under QP SK inputs. to [ u 1 u 2 ] and N rvq = 1 while with B = 2 , the cod ebook has an additional R VQ c odeword and a loca l codeword arou nd [ u 1 u 2 ] . Similarl y , with B = 4 , N stat = 3 , N 1 loc = N 2 loc = 3 , N 3 loc = 2 and N rvq = 5 . The statistical codewords co rrespond to [ u 1 u i ] , i = 2 , · · · , 4 . Since we are mainly interested in illustrating the performance gains in the high - SNR regime, uniform p ower allocation is u sed for Λ stat . Fig. 3(a) s hows the av erage mutual i nformation wit h a Gaussian i nput for s tatistical and limit ed feedback precoding. In add ition to the mutual information, raw bit error rate (BER) is us eful as well. Fig 3(b) s hows the improvement in error probability in the same channe l with QPSK inpu ts. In the error prob ability case , the index of the codeword tha t minimizes the distance to the instantaneo us e V H is fed back. Note that while the performance gap between the o ptimal and the statistical schemes is significa ntly bridged in the error prob ability c ase, further improvement in mutua l information is poss ible. Nevertheless, both the figures show that s ubstantial gains are po ssible with a few b its of fee dback . For example, with B = 4 bits of feedback , a 3 dB gain is p ossible at a rate of 10 bps /Hz while a 6 dB gain is p ossible at a BER of 10 − 3 . Also, note that an i.i.d. co debook d esign inc urs a d ramatic los s in performance in c orrelated channe ls. In the se cond study , we co nsider a 4 × 4 ch annel with non-sep arable co rrelation following the virtual 22 −15 −10 −5 0 5 10 15 20 25 0 5 10 15 20 25 SNR (dB) Average Mutual Information (bps/Hz) Perfect CSI B = 0 (Statistics) B = 1 B = 2 B = 4 B = 4 (Grassmannian) Fig. 4. A verage mutual information with Gaussian inputs in a 4 × 4 mi smatched channel with non-separable correlation and M = 3 . representation framework. Th e variance ma trix σ ( i, j ) , E | H ind ( i, j ) | 2 used in the s tudy is σ = 1 . 24 1 . 42 7 . 49 0 . 23 0 . 41 0 . 14 0 . 42 0 . 03 0 . 72 1 . 39 0 . 07 0 . 02 0 . 28 0 . 13 0 . 50 1 . 51 . (21) Note that the c hanne l ha s a single dominan t transmit (as well a s receiv e) e igen-mode and is h ence mismatched wh en M = 3 data-streams are used in signaling. The pa rameters o f the root cod eset are N = 4 , θ ≈ 0 . 87 a nd γ ≈ 0 . 84 . As before, let { u i } be the co lumn vectors of the D FT matrix U t . The codebo ok for B = 1 has the two s tatistical c odewords [ u 3 u 2 u 1 ] a nd [ u 3 u 2 u 4 ] . For B = 2 , we us e two additional R VQ codewords and for B = 4 , we us e N stat = 3 , N 1 loc = N 2 loc = 3 , N 3 loc = 2 and N rvq = 5 . The third statistical cod ew ord when B = 4 is [ u 3 u 1 u 4 ] . Fig. 4 illustrates the bridging of the gap in mutual information be tween the optimal an d the statistical scheme s. It is important to note that both the channe ls s tudied here a re so co nstructed to resu lt in a subs tantial performance gap between p erfect CSI and s tatistical signa ling. In more rea listic cha nnels that are no t so poorly matched, we expect an ev en better performance with our sch eme. Thus our stud ies illustrate tha t substantial gains c an be achieved ev en with few bits of feedb ack. 23 V I I . C O N C L U D I N G R E M A R K S In this work, we have studied linear precod ing unde r a realistic system model. In particular , the focus is o n the impact of spatial correlation when perfec t CSI is av ailable at the receiver , statistical information is a vail able a t b oth the e nds, and qua ntized cha nnel information is fed back from the receiv er to the transmitter . While initial works on precoding assume perfect CSI at both the ends and hence do not impose a ny particular structure on the prec oder matrices, u nder the mode l studied here, we see tha t structure can help in minimizing the reverse-link feedba ck as well as eas e the implementation c omplexity . W e introduce d the no tion of matche d an d mismatched chann els and illustrated tha t limited feedback precoding is useful only in the c ase of misma tched c hanne ls. The s tudy of statistical precoding mo ti vates the propose d limited feedba ck de sign where we qua ntize the space of semiunitary matrices with a n on- uniform bias towards the sta tistically dominan t e igen-modes. The design as w ell as its adaptability are rendered practical by the construction of mathematical maps (operations) that can rotate and scale subman- ifolds on the Grassmann manifold. More importantly , nu merical studies show that the propose d design s yield significant improvement in performance when the c hanne l is misma tched to the commu nication scheme . This work is a first attempt a t systema tic p recoder codeb ook des ign in sing le-user multi-antenna channe ls that exploits spatial correlation. Possible extensions are the study of more complex rec eiv er architectures and performance a nalysis in the fin ite a ntenna, a rbitrary S NR setting, along the lines of [29 ]. More work a lso need s to be d one to un derstand the impac t of s patial correlation o n the performance of the proposed limited fee dback sche me which could in turn drive the d ev elopment of mo re e f ficient c odeboo k constructions. Ope n issu es that need further study include prac tical asp ects like cod ebook designs for wideband cha nnels, cod ebook des igns based on Fourier / Hadamard matrices that a re us eful in achieving the bou nded gain power a mplifier architecture an d he nce, have found much interest in the stand ardization community , incorporating the cos t o f statistics acq uisition in p erformance analysis [41], an d more genera l scattering envir onment-indepe ndent ch annel deco mpositions [42] that mimic the phys ical mod el closely . The cas e of multi-user systems with feedb ack, wh ich h as attracted sign ificant recent interes t, is ano ther area for s tudy . W e close the paper by drawing attention to the philosop hy that ha s g uided this work. While dedu cing the structure of the optimal s ignaling scheme under gene ral assumptions on spatial correlation and channe l information seems extremely dif ficult, an alternativ e app roach that partitions this problem into smaller sub-problems could be quite fruitful. The general idea of matching the rank of the precoding scheme to the 24 number of dominant transmit eigen v alues w ith the resolution nec essa ry to de cide whether a n eigen value is “d ominant” or no t being a function of the SNR reminds one of the clas sical source-ch annel ma tching paradigm [43 ]. Initial evidence se en in this pap er also sugg ests that this partitioning p rovides a natural framew ork to unde rstand the pe rformance of limited feed back sch emes. A P P E N D I X A. Pr oof of Theo r em 1 The efficacy of the rotation map is established if we c an show the follo wing: 1) G H i G i = I M for a ll i , 2) G 1 = V ta rget , and 3) d pro j , 2 ( G 1 , G i ) = d pro j , 2 ( V 1 , V i ) for all i . T o prov e 1), first n ote tha t U V 1 and U V target are N t × N t unitary matrices. From the semiun itarity property of V i , G H i G i = I M follo ws triviall y . Using the unitary property o f U V 1 and the deco mposition in the statement of the theo rem, 2) als o follows trivially . For 3), no te that d pro j , 2 ( G 1 , G i ) = λ max G 1 G H 1 − G i G H i = λ max U V target U H V 1 V 1 V H 1 − V i V H i U V 1 U H V target = d pro j , 2 ( V 1 , V i ) . (22 ) In the above cha in of equa lities, we have use d the fact that λ ( AB ) = λ ( BA ) a nd the unitary prope rty of U V 1 and U V target . Thu s the proof is co mplete. B. Generalized Sca ling Map Theorem 2 : Le t R be a roo t codese t with packing density γ and c enter V 1 . Le t U A and W be arbitrary M × M unitary matrices and let U B be an arbitrary ( N t − M ) × ( N t − M ) un itary matrix. Gi ven α ∈ (0 , 1) and M ≤ ( N t − M ) , for any V i ∈ R , generate an M × M diago nal, p ositi ve-definite matrix Λ i with: Λ min , min j Λ i ( j ) = 1 − α 2 1 − λ min ( V H 1 V i V H i V 1 ) and Λ max , max j Λ i ( j ) ≤ 1 . Then, d efine A i as A i = U A Λ 1 / 2 i W H . De fine the M × M principal c omponen t of the ( N t − M ) × M diagonal ma trix Λ B as ( I M − Λ i ) 1 / 2 and B i as B i = U B Λ 1 / 2 B W H . If M > ( N t − M ) , for any V i ∈ R , g enerate an ( N t − M ) × ( N t − M ) diago nal, positiv e-semidefinite matrix Γ i with: Γ max , max j Γ i ( j ) = α 2 1 − λ min ( V H 1 V i V H i V 1 ) and Γ min , min j Γ i ( j ) ≥ 0 . T hen, define B i as U B Λ 1 / 2 B W H with the principal ( N t − M ) × ( N t − M ) comp onent o f Λ B being Γ i . Define A i as A i = U A Λ A W H with the principal ( N t − M ) × ( N t − M ) compone nt of Λ A being I N t − M − Γ i and the principa l southeas t compone nt being I 2 M − N t . 25 Then, the scaling map s ( · ) that leads to a packing density of γ α is given by s ( V i ) = V 1 A i + V null 1 B i (23) where V null 1 is a representa ti ve of the null-spac e corresp onding to V 1 . Pr o of: Let r U denote the rotation e f fected by a unitary matrix U . Sinc e the scaling ope ration has to keep the center of a root cod eset fixed , in the seque l, we use a fixed N t × M ma trix as the ce nter ins tead of V 1 which is depe ndent on the choice of R . This is a chieved by a compo sition of three operations: s ( · ) = r U V 1 ⊙ s vertex ⊙ r U H V 1 ( · ) . (24) Here, r U H V 1 ( · ) rotates the root c odese t t o the can onical precoder [ I M O M × ( N t − M ) ] T while s vertex ( · ) sc ales (shrinks) the cano nical code set by a factor α and r U V 1 rotates it back to the direction correspo nding to V 1 . From the above d efinition o f s ( · ) , we have s ( V i ) = h V 1 V null 1 i s vertex V H 1 V i V null ,H 1 V i = h V 1 V null 1 i A i B i = V 1 A i + V null 1 B i where we have used a p artitioning [ A T i B T i ] T for the N t × M matrix s vertex V H 1 V i V null ,H 1 V i . In this partitioning, A i is M × M an d is o f full ran k wh ile B i is an ( N t − M ) × M ma trix. Gi ven that V H 1 V 1 = I M , V H 1 V null 1 = O M × ( N t − M ) and V null ,H 1 V null 1 = I N t − M , the relationship A H i A i + B H i B i = I M ensures that s ( V i ) is semiun itary . W e show that A i and B i have to be as in the statement of the theorem s o tha t the following prop erties of s ( · ) are met: 1) d pro j , 2 ( s ( V 1 ) , s ( V i )) = αd pro j , 2 ( V 1 , V i ) for all i , and 2) s ( V 1 ) = V 1 . First, let us consider the distance scaling property . Assuming 2) (which we c heck s ubseq uently) and follo wing Prop. 1, we n eed λ max ( C ) = λ max V 1 V H 1 − s ( V i ) s ( V i ) H = α q 1 − λ min ( V H 1 V i V H i V 1 ) (25) where C , V 1 V H 1 − V 1 A i A H i V H 1 − V null 1 B i A H i V H 1 − V 1 A i B H i V null ,H 1 − V null 1 B i B H i V null ,H 1 . In the expansion for C , we have us ed the relations hip in (23). W e c an de compose C as C 2 C T 1 where C T 1 = V H 1 A H i V H 1 B H i V null ,H 1 B H i V null ,H 1 , C 2 = h V 1 ( I M − A i A H i ) − V null 1 B i − V 1 A i − V null 1 B i i . (26) 26 Note that the n on-tri vial eigen values of AB are the sa me as t hose of BA . Hence, λ max ( C ) = λ max ( C T 1 C 2 ) . Using the facts V H 1 V 1 = I M , V H 1 V null 1 = O M × ( N t − M ) and V null ,H 1 V null 1 = I N t − M , obs erve that the 4 M × 4 M matrix C T 1 C 2 is giv en by C T 1 C 2 = I M − A i A H i O M − A i O M A H i ( I M − A i A H i ) O M − A H i A i O M O M − B H i B i O M − B H i B i O M − B H i B i O M − B H i B i . (27) W e will now show that the lar gest eige n value of C T 1 C 2 can be computed in c losed-form. For this, we need to solve for λ by se tting det( C T 1 C 2 − λ I 4 M ) = 0 . T owards this c omputation, we ne ed to use Lemma 2 follo wing wh ich, we have det( C T 1 C 2 − λ I 4 M ) det( − B H i B i − λ I M ) = det I M − A i A H i − λ I M O M − A i A H i ( I M − A i A H i ) − λ I M − A H i A i O M − λ B H i B i ( B H i B i + λ I M ) − 1 − λ I M . (28) W ith κ = det( − B H i B i − λ I M ) det( − λ I M ) , upon another application of Lemma 2 we h ave det( C T 1 C 2 − λ I 4 M ) κ = det I M − A i A H i − λ I M A i B H i B i ( B H i B i + λ I M ) − 1 A H i ( I − A i A H i ) − λ I M + A H i A i B H i B i ( B H i B i + λ I M ) − 1 (29) which can be s implified to det( C T 1 C 2 − λ I 4 M ) = det( − B H i B i − λ I M ) det( − λ I M ) det( − λ I M + A H i A i B H i B i ( B H i B i + λ I M ) − 1 ) × det( − λ I M − λ A − H i ( − λ I M + A H i A i B H i B i ( B H i B i + λ I M ) − 1 ) − 1 A H i ( I M − A i A H i )) . Note that d et( C T 1 C 2 − λ I 4 M ) = 0 has 4 M solutions for λ with the solution from the first two terms being non-pos iti ve. Se tting the fourth term to z ero, an d using the facts that det( I + CD ) = det( I + DC ) and I M = A H i A i + B H i B i , we see that λ h as to satisfy: − 1 − λ i (( − λ I M + A H i A i ( I M − A H i A i )( I M + λ I M − A H i A i ) − 1 ) − 1 ( I M − A H i A i )) = 0 . (30) After some s traightforward simplifications, we ca n che ck that λ is a so lution to λ i ( λ ( I M − A H i A i ) − 1 − A H i A i ( I M + λ I M − A H i A i ) − 1 ) = 1 . (31) Assume a singular value decompo sition for A i and B i of the form: A i = U A Λ 1 / 2 A W H A and B i = U B Λ 1 / 2 B W H B , res pectiv ely where U A , W A and W B are M × M unitary matrices, and U B is an ( N t − M ) × ( N t − M ) unitary ma trix. The full-ranknes s of A i means that the M × M diag onal matrix Λ A 27 is positiv e defin ite while the ( N t − M ) × M matrix Λ B has no n-negati ve e ntries only alon g the leading diagonal. Since A H i A i + B H i B i = I M , we have I M − Λ A = W H A W B ( Λ T B Λ B ) 1 / 2 W H B W A . Comparing the two s ides, we s ee that W A = W B (we set b oth to be W ) an d I M − Λ A = ( Λ T B Λ B ) 1 / 2 . Note that since there are no constraints on / relationship between U A and U B , the leading diago nal e ntries of Λ A and Λ B can b e in any o rder . This is bec ause either unitary matrix can be appropriately a djusted by a permutation ma trix. Plugging in A H i A i = WΛ A W H in (31), a routine c omputation yields M solutions to λ of the form: λ 2 = 1 − Λ A ( i ) . W ith the same form of A H i A i , by setting the third term to zero, we obtain another M solutions λ = p 1 − Λ A ( i ) · √ 1+3 Λ A ( i ) − √ 1+ Λ A ( i ) 2 . Note that √ 1+3 Λ A ( i ) − √ 1+ Λ A ( i ) 2 < 1 and hence , λ max ( C ) is obtained by setting i = M in the above s olution wh ich re sults in λ max ( C ) = p 1 − λ min ( A H A ) . Us ing this in (25), we g et the expression for λ min ( A H i A i ) . Fu rthermore, I M = A H i A i + B H i B i implies that 1 = λ max ( A H i A i + B H i B i ) ≥ λ max ( A H i A i ) + λ min ( B H i B i ) ≥ { λ max ( A H i A i ) , λ max ( B H i B i ) } . (32) These are the constraints to be impos ed on Λ A to ensu re tha t the sc aling map pres erves se miunitarity and reduces the minimum distan ce by α . If M ≤ ( N t − M ) , without loss in gen erality ass ume that the diagonal en tries of Λ A are in non - increasing order while tho se of Λ B may be not. Given a choice of Λ A , the cond ition I M − Λ A = ( Λ T B Λ B ) 1 / 2 can be met by choosing the principal M × M compone nt of Λ B to be ( I M − Λ A ) 1 / 2 . If M > ( N t − M ) , ass ume that the diagonal en tries of Λ B are in n on-increasing orde r while those of Λ A may b e n ot. Th en, the c ondition I M − Λ A = ( Λ T B Λ B ) 1 / 2 can be met if 2 M − N t entries o f Λ A are 1 . The add itional constraint on the smallest diag onal entry (se e discu ssion a bove) ensu res distanc e scaling. T o close the theorem, it is nece ssary to verify that s ( V 1 ) = V 1 . T his can b e done by check ing that Λ i can be compu ted in closed -form. For this, note that Λ min = 1 and since Λ max ≤ 1 , we have Λ i = I M . From here, it can be c hecked that B i = O ( N t − M ) × M and from (23), we thus have s ( V 1 ) = V 1 U A W H . On the Grassma nn manifold G ( N t , M ) , multiplication by an M × M unitary matrix res ults in the s ame “point. ” Thus s ( V 1 ) = V 1 and the proof is c omplete. Note that the c hoice of the scaling map is non -unique due to freedom in the c hoice of U A , U B and W as well as the e igen values of Λ i and Γ i . The case of V i = V 1 is spe cial where Λ i turns ou t to be I M . W ith almost a ny other choice o f V i , these matrices are non-identity , in gen eral. Beside s these choices , non-unique ness of the rep resentative of V null 1 also leads to non-uniquen ess o f the map. 28 R E F E R E N C E S [1] V . T arokh, N. S eshadri, and A. R. Calderbank, “Space-T ime Codes for High Data Rate W ireless Communication: Performance Criterion and Code Construction, ” IEE E T ra ns. Inform. T heory , vol. 44, no. 2, pp. 744–765, Mar . 1998. [2] ´ I. E. T elatar , “Capacity of Multi-Antenna Gaussian Channels, ” Eur . T rans. T elecommun. , vol. 10, pp. 2172–2 178, 2000. [3] D. J. Love, R. W . Heath, Jr ., W . Santipach, and M. L. Honig, “What is the V alue of Limited Feedback for MIMO Channels?, ” IE EE Commun. Mag az. , vol. 42, no. 10, pp. 54–59, Oct. 2004. [4] V . Ragh av an, J. H. K otecha, and A. M. Sayeed, “Canonical Statistical Models for Correlated MIMO Fading Channels and Capacity Analysis, ” Submitted, IE EE T rans. I nform. Theory , Nov . 2007, A va ilable: [Online]. http://www .ifp.uiuc. edu/ ∼ vasanth . [5] W . W eichselberger , M. Herdin, H. Ozcelik, and E. Bonek, “A Stochastic MIMO Channel Model with Joint Correlation of Both Link Ends, ” IE EE T ran s. W i r eless Commun. , vol. 5, no. 1, pp. 90–100, Jan. 2006. [6] A. M. Tu lino, A. Lozano, and S. V erd ´ u, “Impact of Antenna Correlation on the Capacity of Multiantenna Channels, ” I EEE T rans. Inform. T heory , vol. 51, no. 7, pp. 2491–2 509, July 2005. [7] C. N. Chuah, J. M. Kahn, and D. N. C. T se, “Capacity S caling i n MIMO Wireless Systems under Correlated Fading, ” IEEE T rans. Inform. T heory , vol. 48, no. 3, pp. 637–650 , Mar . 2002. [8] A. M. S ayeed, “Deconstructing Multi-Antenna Fading Channels, ” IEEE Tr ans. Sig. P r oc. , vol. 50, no. 10, pp. 2563–2 579, Oct. 2002. [9] A. M. S ayeed and V . V . V eerav alli , “Essential Degrees of Freedom in Space-Time Fading Channels, ” P r oc. 13th IEEE Intern. Symp. P ersonal I ndoor and Mobile Radio Commun. , vol. 4, pp. 1512–1516, Sept. 2002. [10] K. H. Lee and D. P . P etersen, “Optimal Linear Coding for V ector Channels, ” IEEE T ran s. Commun. , vol. 24, no. 12, pp. 1283–1 290, Dec. 1976. [11] J. Sal z, “Digital T ransmission over Cross-Coupled Li near Channels, ” A T &T T ech. J. , vol. 64, no. 6, pp. 1147–1159, July-Aug. 1985. [12] J. Y ang and S. Roy , “On Joint T ransmitter and Recei ver Optimization for Multiple-Input-Multiple-Output (MIMO) T ransmission Systems, ” IEEE T rans. Commun. , vol. 42, no. 12, pp. 3221–3231, Dec. 1994. [13] A. Scaglione, G. B. Giannakis, and S. B arbarossa, “Redundant Filterbank Precoders and Equalizers Part I: Unification and Optimal Designs, ” IEEE Tr ans. Sig. P r oc. , vol. 47, no. 7, pp. 1988–200 6, July 1999. [14] H. Sampath, P . St oica, and A. Paulraj, “Generalized Linear P recoder and Decoder Design for MIMO Channels Using the W eighted MMSE Criteri on, ” IEE E T ra ns. Commun. , vol. 49, no. 12, pp. 2198–22 06, Dec. 2001. [15] H. Sampath and A. Paulraj, “Linear Precoding for Space-T ime Coded Systems wit h Known Fading Correlations, ” IEE E Commun. Letters , vol. 6, no. 6, pp. 239–241 , June 2002. [16] J. Y ang and S. Ro y , “Joint Transmitter -Receiv er Optimization for Multi-input Multi-output Systems with Decision Feedback, ” IE EE T ran s. Inform. Theory , vol. 40, no. 5, pp. 1334–13 47, Sept. 1994. [17] A. Scaglione, P . Stoica, S. Barbarossa, G. B. Gi annakis, and H. Sampath, “Optimal Designs for Space-T ime Linear Precoders and Decoders, ” IE EE T ran s. Sig. Pro c. , vol. 50, no. 5, pp. 1051–1064, May 2002. [18] D. P . Palomar , J. M. Cioffi, and M. A. Lagunas, “Joint Tx-Rx Beamforming Design for Multicarrier MIMO Channels: A Unified Framew ork for Con ve x Optimization, ” IEEE T rans. Sig. Pr oc. , vol. 51, no. 9, pp. 2381–240 1, S ept. 2003. [19] D. J. Love, R. W . Heath, Jr ., and T . Strohmer , “Grassmannian Beamforming for Multiple-Input Multiple-Output W ireless Systems, ” IEEE T ran s. Inform. Theory , vol. 49, no. 10, pp. 2735–2 747, Oct. 2003. 29 [20] K. K. Mukkavilli, A. S abharwal, E. Erkip, and B. Aazhang, “On Beamforming with Finite Rate Feedback in Multiple Antenna Systems, ” IEE E T rans. Inform. T heory , vol. 49, no. 10, pp. 2562–2579, Oct. 2003. [21] W . Santipach, Y . S un, and M. L . Honig, “Benefits of Limited Feedback for Wireless Channels, ” Proc. Annual Allerton Conf. C ommun. Contr ol and Computing , Oct. 2003. [22] J. C. Roh and B. D. R ao, “T ransmit Beamforming in Multiple-Antenna Systems w ith Finite Rate Feedback: A VQ-Based Approach, ” IEEE T rans. Inform. Theory , vol. 52, no. 3, pp. 1101–1112, Mar . 2006. [23] D. J. Love and R. W . Heath, Jr ., “Limited Feedback Diversity T echniques for C orrelated C hannels, ” IEEE T ran s. V eh. T ech. , vol. 55, no. 2, pp. 718–722, Mar . 2006. [24] P . Xia and G. B. Giannakis, “Design and Analysis of Transmit Beamforming based on Limited-Rate F eedback, ” I EEE T rans. Sig. Pr oc. , vol. 54, no. 5, pp. 1853–1863, May 2006. [25] V . R aghav an, R . W . Heath, Jr ., and A. M. Sayeed, “Systematic Codebook Designs for Quantized Beamforming in Correlated MIMO Channels, ” IEEE Journ. Selected Areas in Commun. , vol. 25, no. 7, pp. 1298–13 10, S ept. 2007. [26] D. J. L ov e and R. W . Heath, Jr., “Limit ed Feedback Unitary Precoding for Spatial Multiplexing, ” IEEE T rans. Inform. Theory , vol. 51, no. 8, pp. 2967–2976, Aug. 2005. [27] J. C. Roh and B. D. Rao, “Multiple Antenna Channels with Partial Channel State Information at the T ransmitter, ” IEEE T rans. W i r eless Commun , vol. 3, no. 2, pp. 677–688, Mar . 2004. [28] D. J. Love and R. W . Heath, Jr . , “Multimode P recoding for MIMO Wireless Systems, ” IEEE Tr ans. Sig. Pr oc. , vol. 53, no. 10, pp. 3674–3687 , Oct. 2005. [29] V . Raghav an and A. M. Sayeed, “Impact of Spatial Correlation on S tatistical P recoding i n MIMO Channels with Linear Receiv ers, ” Pr oc. Annual All erton Conf. Commun. C ontr ol and Computing , Sept. 2006, A vailable: [Online]. http://www .ifp.uiuc. edu/ ∼ vasanth . [30] V . V . V eerav alli, Y . Liang, and A. M. Sayeed, “Correlated MIMO Rayleigh Fading Channels: Capacity , Optimal Signaling and Asymptotics, ” IEEE Tr ans. Inform. Theory , vol. 51, no. 6, pp. 2058–20 72, June 2005. [31] K. Y u, M. Bengtsson, B. Ott ersten, D. McNamara, P . Karlsson, and M. Beach, “Second Or der Statistics of NLOS indoor MIMO Channels based on 5.2 GHz Measurements, ” Proc. IEEE Global T elecommun. Conf. , vol. 1, pp. 25–29, Nov . 2001. [32] H. Ozcelik, M. Herdin, W . W eichselberger , J. W allace, and E . Bonek, “Deficiencies of ’Kronecker’ MIMO Radio Channel Model, ” Electr onics L etters , vol. 39, no. 16, pp. 1209–1210 , Aug. 2003. [33] J. W all ace, H. Ozcelik, M. Herdin, E . B onek, and M. Jensen, “Power and Complex En velope Correlation for Modeling Measured Indoor MIMO Channels: A Beamforming Evaluation, ” Proc. 58th IE EE F all V ehicular T echn ology Confer ence, 2003 , vol. 1, pp. 363–367 , Oct. 2003. [34] Y . Zhou, M. Herdin, A. M. Sayeed, and E. Bonek, “Experimental S tudy of MIMO Channel S tatistics and Capacity via the V irtual Channel Representation, ” T ech. Rep., Univ ersity of Wisco nsin-Madison, May 2006, A vailable: [Online]. http://dun e.ece.wic. edu . [35] A. Barg and D. Y u. Nogin, “Bounds on Packings of Spheres in the Grassmann Manifolds, ” IEEE Tr ans. Inform. Theory , vol. 48, no. 9, pp. 2450–2454 , S ept. 2002. [36] A. Edelman, T . Arias, and S. Smith, “The Geometry of Algorithms with Orthogonality Constraints, ” SIAM J. Matrix Anal. Appl. , vol. 20, no. 2, pp. 303–353, Apr . 1999. [37] J. H. Conway , R. H. Hardin, and N. J. A. Sloane, “Pack ing Lines, Planes etc., Packings in Grassmannian Spaces, ” Experimental Math. , vol. 5, no. 2, pp. 139–159 , 1996. [38] J. R. Silvester , “Determinants of Block Matrices, ” T he Mathematical Gazette , vol. 84, no. 501, pp. 460–467, Nov . 2000. 30 [39] V . Raghav an, A. M. Sayeed, and N. Boston, “Near-Optimal Codebook Constructions for Limited Feedback Beamforming in Correlated MIMO Channels wit h Few Antennas, ” Proc . IEEE Intern. Symp. Inform. T heory , pp. 2622–2626 , July 2006. [40] R. S amanta and R. W . Heath, Jr ., “Codebo ok Adaptation for Quantized MIMO Beamforming Systems, ” P r oc. IEEE Asilomar Conf. Signals, Systems and Computers , pp. 376–380, Nov . 2005. [41] V . Raghav an, A. S . Y . Poon, and V . V . V eerav alli, “Non-Robustness of Statistics Based Beamformer Design in Correlated MIMO Channels, ” Pro c. IEEE Intern. Conf. Acoustics, Speech and Sig. Pr oc. , 2008. [42] V . Raghav an, A. S . Y . Poon, and V . V . V eerav alli, “MIMO S ystems wit h Arbitrary Antenna Array Architectures: Channel Modeling, Capacity and L o w-Complexity Signaling, ” Pro c. IEEE Asilomar Conf. Signals, Systems and Computers , Nov . 2007. [43] T . M. Cover and J. A. T homas, Elements of Information Theory , W iley Interscience, 1991.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment