On the Expressiveness and Complexity of ATL
ATL is a temporal logic geared towards the specification and verification of properties in multi-agents systems. It allows to reason on the existence of strategies for coalitions of agents in order to enforce a given property. In this paper, we first…
Authors: Francois Laroussinie, Nicolas Markey, Ghassan Oreiby
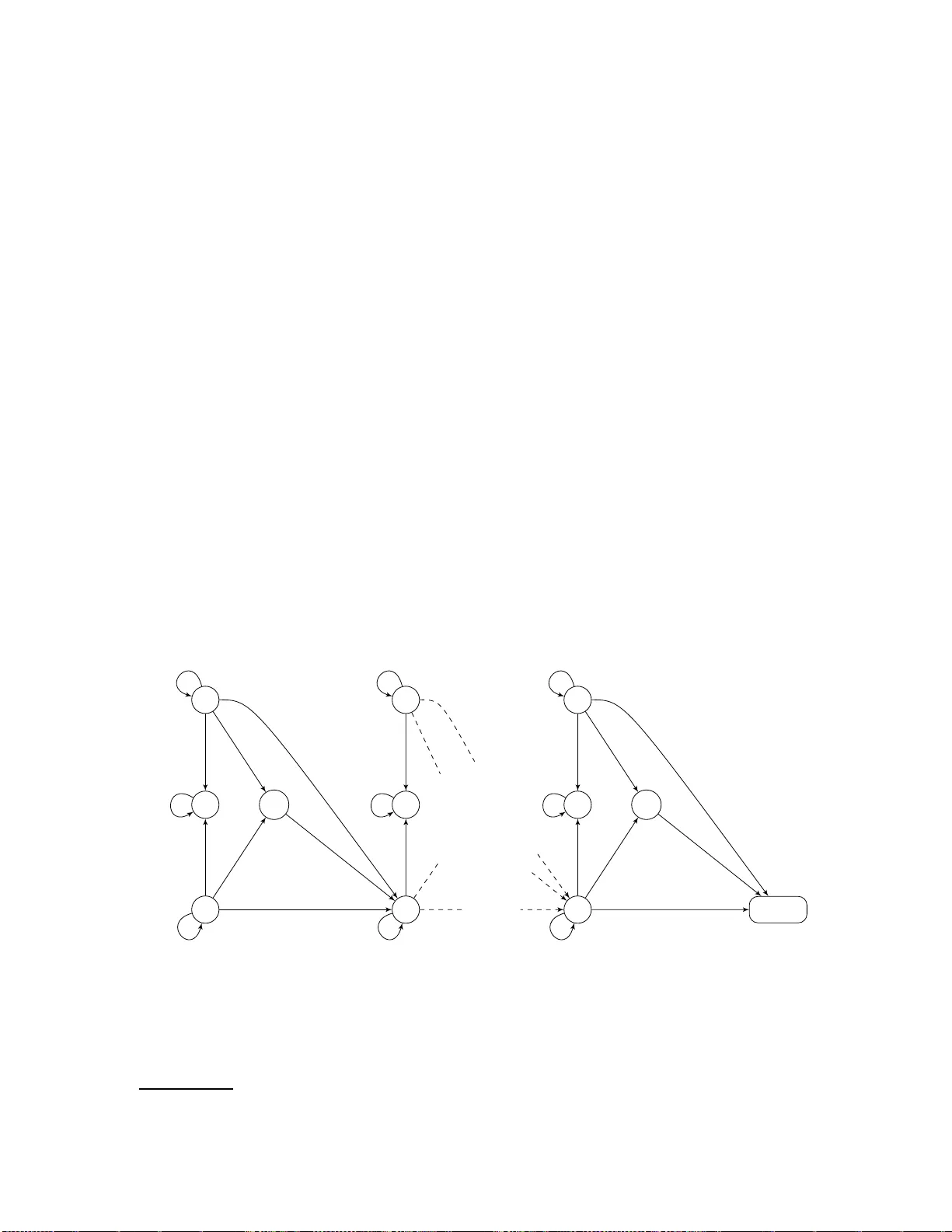
Logical Methods in Computer Science V ol. 4 (2:7) 2008, pp. 1–25 www .lmcs-online.org Submitted Sep . 20, 2007 Published Ma y 15, 2008 ON THE EXPRESSIVENESS AND COMPLEXITY OF A TL FRANC ¸ OIS LAROUSSINIE a , NICOLAS MARKEY b , AND GHASSAN OREIBY c a LIAF A, Univ. P aris 7 & CNRS, F rance e-mail addr ess : francoisl@lia fa.jussi eu.fr b,c LSV, ENS Cac han & CNRS, F rance e-mail addr ess : { mark ey ,oreib y } @lsv.ens-cac han.fr Abstra ct. A TL is a temp oral logic geared tow ards th e specification and v erification of prop erties in m ulti-agen ts systems. It allow s to reason on th e existence of strategies for coalitions of agents in order to enforce a given prop erty . In this pap er, we first precisely chara cterize the complexity of A TL mo del-c hec king ov er Alternating T ransition Systems and Concurrent Game Structures when the num ber of agents is not fixed. W e prov e that it is ∆ P 2 - and ∆ P 3 -complete, d ependin g on t he underlying multi-agen t mod el (A TS and CGS resp.). W e also consider the same problems for some extensions of A TL . W e t h en consider expressiveness issues. W e show how A TS an d CGS are related and provide translations b et w een these mo dels w.r.t. alternating bisim ulation. W e also pro ve th at the stand ard definition of A TL (built on mo dalities “Next”, “Alw a ys” and “Until”) cannot exp ress the duals of its modalities: it is necessary to explicitely add the modality “Release” . 1. Introduction Mo del c hecking . T emp oral logics w ere prop osed for the sp ecification of reactiv e systems almost thirt y yea rs ago [CE81, Pnu77, QS 82]. They hav e b een widely stud ied and success- fully used in man y situations, esp ecia lly for mo del c hec king —the au tomatic verificatio n that a finite-state mod el of a system satisfies a temp oral logic sp ecification. Tw o fl av ors of temp oral logics hav e mainly b een stu d ied: line ar-time temp or al lo gics , e. g. L TL [Pn u77], whic h exp resses pr op er ties on the p ossible exe cutions of the mo del; and br anching-time tem- p or al lo gics , such as CT L [CE 81, QS 82], whic h can expr ess requir emen ts on states (whic h ma y h a ve seve ral p ossible futur es) of th e mo del. 1998 ACM Subje ct Cl assific ation: F.1.1,F.3. 1. Key wor ds and phr ases: multi-agen t systems, temporal logic, mo del c hecking. This article is a lo ng vers ion of [LMO07]. c This author is sponsored by a PhD grant from Region ˆ Ile-de-F rance. LOGICAL METHODS l IN COMPUTER SCIENCE DOI:10.216 8/LMCS-4 ( 2:7) 2008 c F . La roussinie, N. M arkey, and G. Oreiby CC Creative Commons 2 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY Alternating-time temporal log ic. Over the last ten ye ars, a new fl a vo r of temp oral logics has b een defined: alternating-time temp or al lo gics ( A TL ) [AHK97]. A TL is a fun damen tal logic for v erifying p rop erties in synchr onous multi-agent systems , in w hic h sev eral agen ts can concur ren tly act up on the b eha vior of the sy s tem. Th is is particularly in teresting for mo deling con trol p roblems. In that setting, it is not only in teresting to kno w if something c an arrive or wil l arrive , as can b e expressed in C TL or L TL , but rather if some ag en t(s) can c ontr ol the ev olution of the system in order to enforce a give n prop erty . The logic A TL can precisely express th is kind of prop erties, and can for instance state that “there is a strategy for a coalition A of agen ts in order to even tually reac h an accepting state, whatev er the other agents do”. A TL can b e seen as an extension of CTL ; its form u- lae are built on atomic prop ositions and b oolean com b inators, and (follo wing the semin al pap ers [AHK97, AHK98, AHK02]) on modalities h h A i i X ϕ (coalition A has a strategy to immediately ente r a state sat isfying ϕ ), h h A i i G ϕ (coalition A can f orce the system to alw a ys satisfy ϕ ) and h h A i i ϕ U ψ (coalition A has a strategy to enforce ϕ U ψ ). Multi-agen t mo dels. While lin ear- and branc hing-time temp oral logics a re inte rpreted on Kripke stru cture, alternating-time temp oral logics are in terpreted on mo dels that incorp o- rate the notion of multiple agents . Two kinds of synchronous m ulti-ag en t m od els ha v e b een prop osed for A TL in the literature. First Alterna ting T r ansition Systems (A TSs)[AHK98] ha v e b een defined: in an y lo catio n of an A TS, eac h agen t c ho oses one move , i.e. , a subset of lo cati ons (the list of p ossible mo ves is defined explicitly in the mo del) in whic h she w ould lik e the execution to go to. When all the agen ts ha ve made their c hoice, the intersectio n of their c hoices is requir ed to con tain one single lo cation, in whic h the execution enters. In the second family of mo dels, called Concurr ent Game Structur es (CGSs) [AHK02], eac h of the n agen ts h as a fin ite n u mb er of p ossib le mo ves (n um b ered with in tegers), and , in eac h lo cati on, an n -ary trans itio n function indicates the state to whic h th e execution go es. Our con tributions. First w e precisely c haracterize the complexit y of the mod el chec king problem. The original wo rks ab out A TL pro vide mo del-c hec kin g algorithms in time O ( m · l ), where m is the num b er of transitions in the mo del, and l is th e size of the formula [AHK98, AHK02], th us in PT IME . Ho wev er, con trary to Kripk e structures, the n u m b er of transitions in a CGS or in an A TS is n ot qu ad r atic in the num b er of states [AHK02], and might eve n b e exp onen tial in the num b er of agen ts. PTIME -complete ness thus only holds for A TS when the n um b er of age n ts is b oun ded, and it is shown in [JD05, JD06] that the problem is strictly 1 harder otherwise, namely NP - hard on A TS and Σ P 2 -hard on CGSs where the transition function is enco ded as a b o olean function. W e p r o ve that it is in fact ∆ P 2 -complete and ∆ P 3 - complete, resp. W e also precisely c haracterize the complexit y of mo del-c hecki ng classica l extensions of A TL , dep end ing on the u nderlying family of mo d els. Then w e add ress expressiveness questions. First w e sh o w ho w A TSs and CGSs are related b y p ro viding translations b et w een these mo dels. Moreo ve r w e consider expressiv e- ness questions ab out A TL mo dalities. While in L TL and CT L , the dual of “Until” mo dalit y can b e expr essed as a disju nction of “alw a ys” and “un til”, we pro ve that it is not the case in A TL . In other words, A TL , as defined in [AHK97, AHK98, AHK02], is not as expr essiv e 1 W e adopt the clas sical hypothesis that th e p olynomial-time hierarc hy does not colla pse, and th at PTIME 6 = NP . W e refer to [P ap94] for the d efinitions about complexity classes, especially about oracle T uring mac h ines and the polynomial-time hierarc hy . ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 3 as one could exp ect (while the d u al mo dalities clearly do not incr ease the complexit y of the v erification problems). Related works. In [AH K98, AHK02], A TL has b een defined and stud ied o ver A TSs and CGSs. In [HRS02], expressiveness issues are considered for A TL ∗ and A TL . Complexit y of satisfi- abilit y is addressed in [GvD06, WL WW06]. Complexit y results ab out mo del c h ec king (for A TL , A TL + , A TL ∗ ) can b e foun d in [AHK02, Sc h 04]. Regarding control- an d game theory , man y pap ers h a v e focu s ed on this wide area; we refer to [W al04 ] for a surve y , and to its n umerous referen ces for a complete o v erview. Plan of the pap er. Section 2 con tains the form al d efinitions n eeded in th e sequ el. Sec- tion 3 deals with the mod el-c hec king qu estio ns and con tains alg orithms and complexit y analysis f or A TSs and CGSs. S ecti on 4 con tains ou r expressiveness results: we first p ro ve that A TSs and CGS s hav e the same expr essiv e p ow er w.r.t. alternating bisim ulation ( i.e . , an y CGS can b e translated in to an equiv alent A T S , and vice-v ersa). W e then present our expressiv eness results concerning A TL mo d alitie s. 2. Definitions 2.1. Concurren t Game St ructures. Concurren t game stru ctures are a m u lti-pla y er ex- tension of classical Kripke structures [AHK02]. Th eir definition is as follo ws : Definition 2.1. A Concurr ent Game Structur e ( CGS for short) C is a 6-tuple ( A gt , Loc , AP , Lab , Mov , Edg ) where: • Agt = { A 1 , ..., A k } is a finite set of agents (or players ); • Loc and AP are t w o finite sets of lo c ations and atomic pr op osition s , r esp.; • Lab : Loc → 2 AP is a function lab eling eac h lo cation by the set of ato mic prop ositions that hold for that lo cation; • Mov : Lo c × Agt → P ( N ) r { ∅ } d efines the (fi nite) set of p ossible mo v es of eac h agen t in eac h lo cation. • Edg : Loc × N k → Loc , where k = | Agt | , is a (p artial) f u nction defin ing the transition table. With eac h lo cation and eac h set of mo v es of the agen ts, it asso ciates th e resulting lo cati on. The in tended b eha viour is as follo ws [AHK02]: in a lo cation ℓ , eac h play er A i c h ooses one p ossible mo v e m A i in Mov ( ℓ, A i ) and the next lo cation is give n by Edg ( ℓ, m A 1 , ..., m A k ). W e write Next ( ℓ ) for the set of all p ossible su ccessor lo cations from ℓ , and Next ( ℓ, A j , m ), with m ∈ Mov ( ℓ, A j ), for the restriction of Next ( ℓ ) to lo cations reac hable fr om ℓ when pla y er A j mak es the mo v e m . The wa y the transition table Edg is enco ded has not b een made precise in the original definition. F ollo wing the remarks of [JD05 ], w e prop ose t w o p ossible enco dings: Definition 2.2. • An explicit CGS is a CGS where the transition table is defined explicitl y . 4 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY • An implicit CGS is a CGS w h ere, in eac h location ℓ , the transition f unction is defined by a finite sequence (( ϕ 0 , ℓ 0 ) , ..., ( ϕ n , ℓ n )), where ℓ i ∈ Loc is a lo cation, and ϕ i is a b o olean com b ination of prop ositions A j = c th at ev aluate to true iff agen t A j c h ooses mo v e c . The transition ta ble is then defined as follo ws: Edg ( ℓ, m A 1 , ..., m A k ) = ℓ j iff j is the lo west index s.t. ϕ j ev aluates to true when p la ye rs A 1 to A k c h oose mo v es m A 1 to m A k . W e require that the last b oolean form ula ϕ n b e ⊤ , so that no agen t can enforce a d eadloc k. Besides the theo retical asp ect, the implicit description of CGSs m a y rev eal useful in practice, as it allo ws to not explicitl y describ e the full transition table. The size |C | of a CGS C is defined as | Loc | + | Edg | . F or explicit CGSs, | Ed g | is the size of the transition table. F or implicit CGSs, | Edg | is the sum of the sizes of the formulas used for th e defin ition of E dg . 2.2. Alternating T ransit ion Systems. In the origi nal w ork s ab out A TL [AHK97], the logic was interpreted on A TS s , whic h are transition systems sligh tly different from CGSs: Definition 2.3. An Altern ating T r ansition System ( A TS for short) A is a 5-tuple ( Ag t , Loc , AP , Lab , Mov ) wh ere: • Agt , L oc , AP and Lab ha ve the same meaning as in CGSs; • Mov : Lo c × A gt → P ( P ( Loc )) asso ciate with eac h location ℓ and eac h agen t a the set of p ossible mo v es, eac h mo ve b eing a subset of Loc . F or eac h lo catio n ℓ , it is required that, for any Q i ∈ Mov ( ℓ, A i ), T i ≤ k Q i b e a singleton. The intuitio n is as f ollo ws: in a location ℓ , once all the agen ts ha v e c hosen their mo v es ( i.e. , a subset of lo catio ns), th e execution go es to the (only) state that b elongs to all the sets c h osen b y the play ers. Again Next ( ℓ ) (resp. Next ( ℓ, A j , m )) denotes the set of all p ossible successor lo cations (resp. the set of p ossible successor lo cations when p la ye r A j c h ooses th e mo v e m ). The size of an A TS is | Lo c | + | Mov | where | Mov | is the sum of the num b er of lo cations in eac h p ossible mo ve of eac h agen t in eac h lo catio n. W e pro v e in Section 4.1 that CGSs and A T Ss hav e the same expressive ness (w.r.t. al- ternating bisimilarit y [AHKV98]). 2.3. Coalition, strategy , outcomes of a strategy. A coalitio n is a subs et of agen ts. In multi -agen t systems, a coalition A plays aga inst its opp on ent coaliti on Agt r A as if they w ere tw o single pla yers. W e th us extend Mov and Next to coalitions: • Giv en A ⊆ Agt and ℓ ∈ Loc , Mov ( ℓ, A ) denotes th e p ossible m o ve s for the coal ition A from ℓ . Suc h a mov e m is comp osed of a single mov e for ev ery ag en t of the coa lition, that is m def = ( m a ) a ∈ A . Th en, giv en a mov e m ′ ∈ Mov ( ℓ, Agt \ A ), we u se m ⊕ m ′ to denote the co rresp onding c ompl ete mo ve (one for eac h agen t). In A TSs, suc h a mov e m ⊕ m ′ corresp onds to the unique resu lting lo cation; in CGSs , it is giv en b y Edg ( ℓ, m ⊕ m ′ ). • Next is extended to coalitions in a natural w a y: giv en m = ( m a ) a ∈ A ∈ Mov ( ℓ, A ), w e let Next ( ℓ, A, m ) denote the restriction of Next ( ℓ ) to lo cations reac h able f rom ℓ when eve ry pla y er A j ∈ A m akes the mo v e m A j . Let S b e a CGS or an A TS. A c omputation of S is an infinite sequence ρ = ℓ 0 ℓ 1 · · · of locations su c h that for any i , ℓ i +1 ∈ Next ( ℓ i ). W e write ρ [ i ] for th e i + 1-st lo cation ℓ i . A str ate gy for a p la y er A i ∈ Agt is a fu nction f A i that maps any finite prefix of a computation ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 5 to a p ossible mo v e for A i , i.e. , satisfying f A i ( ℓ 0 · · · ℓ m ) ∈ Mov ( ℓ m , A i ). A strategy is state- b ase d (or memor yless ) if it only dep ends on the curren t sta te ( i. e . , f A i ( ℓ 0 · · · ℓ m ) = f A i ( ℓ m )). A str ategy induces a set of compu tatio ns from ℓ —c alled the outc omes of f A i from ℓ and denoted 2 Out S ( ℓ, f A i )— that pla yer A i can enforce: ℓ 0 ℓ 1 · · · ∈ Out S ( ℓ, f A i ) iff ℓ = ℓ 0 and for an y i we ha ve ℓ i +1 ∈ Next ( ℓ i , A i , f A i ( ℓ 0 · · · ℓ i )). Giv en a coalitio n A ⊆ Agt , a strategy for A is a tu p le F A con taining one strategy for eac h play er in A : F A = { f A j | A j ∈ A } . The outcomes of F A from a lo cation ℓ con tains th e computations enforced by the strategies in F A : ℓ 0 ℓ 1 · · · ∈ Out S ( ℓ, F A ) iff ℓ = ℓ 0 and for any i , ℓ i +1 ∈ Next ( ℓ i , A, ( f a ( ℓ 0 , · · · , ℓ i )) a ∈ A ). The set of strategies for A is d enoted 2 Strat S ( A ). Finally , note that F ∅ is empty and Out S ( ℓ, ∅ ) represents the set of all computations fr om ℓ . 2.4. The logic A T L . W e now defin e th e logic A TL , whose purp ose is t o express con trollabil- it y prop erties on CGSs and A TSs. Our definition is sligh tly differen t from the one p rop osed in [AHK02]. This difference will b e explained and argued in Section 4.2. Definition 2.4. The syn tax of A TL is defined by the follo w ing grammar: A TL ∋ ϕ s , ψ s ::= ⊤ | P | ¬ ϕ s | ϕ s ∨ ψ s | h h A i i ϕ p ϕ p ::= ¬ ϕ p | X ϕ s | ϕ s U ψ s where P ranges o v er the set AP and A o ver the su bsets of Agt . Giv en a formula ϕ ∈ A TL , the s ize of ϕ , denoted by | ϕ | , is the size of the tree rep resen ting that formula. The D A G-size of ϕ is the size of the directed acyclic graph rep resen ting that form ula ( i.e. , sharing common subform ulas). In addition, we use standard abbreviations suc h as ⊤ , ⊥ , F , etc. A TL form ulae are in terpreted o v er states of a game structure S . T he seman tics of the main op erators is defined as follo ws 2 : ℓ | = S h h A i i ϕ p iff ∃ F A ∈ Strat ( A ) . ∀ ρ ∈ Out ( ℓ, F A ) . ρ | = S ϕ p , ρ | = S X ϕ s iff ρ [1] | = S ϕ s , ρ | = S ϕ s U ψ s iff ∃ i. ρ [ i ] | = S ψ s and ∀ 0 ≤ j < i. ρ [ j ] | = S ϕ s . It is w ell-kno wn that, f or the logic A TL , it is sufficien t to restrict to state-based strate- gies ( i.e. , h h A i i ϕ p is satisfied iff there is a state-based strateg y all of wh ose ou tcomes sat- isfy ϕ p ) [AHK02, Sch04]. Note that h h ∅ i i ϕ p corresp onds to the CTL form u la A ϕ p ( i.e. , universal qu an tification o ver all computations issued from the current state), w h ile h h Agt i i ϕ p corresp onds to ex- isten tial quantificat ion E ϕ p . Ho w ever, ¬ h h A i i ϕ p is generally not equiv alen t to h h Agt r A i i ¬ ϕ p [AHK02, GvD06]: indeed the absence of a strateg y for a coalit ion A to ensur e ϕ do es n ot entai l the existence of a strategy for the co alition Agt \ A to en s ure ¬ ϕ . F or in- stance, Fig. 1 d ispla ys a (graphical representa tion of a) 2-play er CGS for whic h, in ℓ 0 , b oth ¬ h h A 1 i i X p and ¬ h h A 2 i i ¬ X p hold. In suc h a representati on, a tran s itio n is la b eled with h m 1 , m 2 i when it corresp onds to mov e m 1 of pla y er A 1 and to mov e m 2 of pla y er A 2 . Fig. 2 represent s an “equiv alen t” A TS with the same prop ert y . 2 W e mig ht omi t to mentio n S when it is clear from the con t ext. 6 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY ℓ 0 p ℓ 1 ¬ p ℓ ′ 1 ¬ p ℓ ′ 2 p ℓ 2 h 1 , 1 i h 1 , 2 i h 2 , 1 i h 2 , 2 i Figure 1: A CGS that is not d etermined. Loc = { ℓ 0 , ℓ 1 , ℓ 2 , ℓ ′ 1 , ℓ ′ 2 } Mov ( ℓ 0 , A 1 ) = {{ ℓ 1 , ℓ ′ 1 } , { ℓ 2 , ℓ ′ 2 }} Mov ( ℓ 0 , A 2 ) = {{ ℓ 1 , ℓ ′ 2 } , { ℓ 2 , ℓ ′ 1 }} with ( Lab ( ℓ 1 ) = Lab ( ℓ 2 ) = { p } Lab ( ℓ ′ 1 ) = Lab ( ℓ ′ 2 ) = ∅ Figure 2: An A TS that is not determined. 3. Complexity of A T L model-chec king In this section, we establish the p r ecise complexit y of A TL mo del-c hec k in g. T h is issue has already b een addressed in the seminal papers ab out A TL , on b oth A T Ss [AHK98] and CGSs [AHK02]. The time complexit y is sho wn to b e in O ( m · l ), where m is the n um b er of transitions and l is the size of the form u la. T he authors then cla im that the mo del-c hecking pr oblem is in PTIME (and ob viously , PTIM E -complete, since it is already for CTL ). In fact this only holds for explicit C GSs. In A TSs, th e num b er of transitions migh t b e exponential in th e size of the system (more precisely , in the num b er of agent s). This p roblem —th e exp onent ial blo w-up of the num b er of transitions to handle in the v erification algorithm— also o ccurs for implicit CGSs: the standard algorithms running in O ( m · l ) require exp onen tial time. Basically , th e algo rithm for mo del-c hecking A TL is similar to that for CT L : it consists in r ecursiv ely computing fixp oint s, b ased e.g. on the follo wing equiv alence: h h A i i p U q ≡ µZ . ( q ∨ ( p ∧ h h A i i X Z )) (3.1) The difference with CTL is that we ha v e to deal with the mo dalit y h h A i i X — corr esp onding to the pr e-image of a set of state s for some c o alition — instead o f th e standard modality E X . In con trol theory , h h A i i X corresp onds to the c ontr ol lable pr e de c essors of a set of states for a coa lition: CPr e ( A, S ), with A ⊆ Agt and S ⊆ Loc , is defi ned as f ollo ws: CPr e ( A, S ) def = { ℓ ∈ Loc | ∃ m A ∈ Mov ( ℓ, A ) s.t. Next ( ℓ, A, m A ) ⊆ S } The crucial p oin t of the mo del-c hec king algorithm is th e computation of the set CPr e ( A, S ). In the sequel, w e establish the exact complexit y of computing CPr e (more precisely , giv en A ⊂ Agt , S ⊆ Loc , and ℓ ∈ Loc , the complexit y of deciding whether ℓ ∈ CPr e ( A, S )), and of A TL mod el-c hec king for our thr ee kinds of m ulti-agen t systems. 3.1. Mo del c hec king A TL on explicit CGSs. As already ment ionned, the precise com- plexit y of A TL mod el-c hec king o v er explicit CGSs w as established in [AHK02]: Theorem 3.1. A TL mo del-che cking over explicit CGSs is PTIME -c omplete. T o our kno wledge, the precise complexit y of computing CPr e in explici t C GSs has nev er b een considered. The b est upp er b ound is PTIME , which is s u fficien t for deriving the PTIME complexity of A TL mo del-c hec king. In fact, giv en a lo cation ℓ , a set of lo catio ns S a nd a coal ition A , d eciding w hether ℓ ∈ CPr e ( A, S ) h as complexit y m u c h lo wer than PTIME : Prop osition 3.2. Computing CPr e in explicit CGSs is in AC 0 . ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 7 Pr o of. W e b egin with precisely defining ho w the input is enco ded as a sequence of bits: • the first | Agt | bits d efine the coalit ion: the i -th bit is a 1 iff agent A i b elongs to A ; • the follo wing | Loc | bits of input define the set S ; • for the sake of simplicit y , we assume that all the agen ts hav e the same n um b er of mo ves in ℓ . W e write p for that n um b er, whic h w e assume is at least 2. The transition table Edg ( ℓ ) is then giv en as a sequence of p k sets of log ( | Loc | ) bits. As a first step, it is r ather easy to mod ify the input in order to ha v e the follo wing form: • first the k bits defi n ing the coa lition; • then, a sequence of p k bits d efining wh ether the resulting state b elongs to S . This is ac hiev ed b y p k copies of the same AC 0 circuit. W e n o w h a ve to b uild a circuit that will “compute” wh ether coalition A has a strateg y for ending up in S . Since circuits must only dep end on the size of the input, w e ca nnot design a circuit for coalition A . Instead, w e build one circuit for eac h p ossible coalition (their n u m b er is exp onen tial in the n um b er of agents, but p olynomial in the size of the input, pro vided that p ≥ 2), and then select the result corresp on d ing to coalition A . Th us, for eac h p ossible coalition B , w e build one circuit w hose final n od e will ev aluate to 1 iff ℓ ∈ CP r e ( B , S ). This is ac hiev ed by an u n b ounded f an -in circuit of d epth 2: at the first level , we put p | B | AND-no d es, represen ting eac h of the p | B | p ossible mo v es for coaliti on B . E ach of those no des is link ed to p k −| B | bits of the transition table, corresp onding to the set of p ossible p k −| B | mo v es of the opp onen ts. A t the second lev el, an OR-no de is link ed to all the n od es at depth 1. Clearly enough, the OR-no de at depth 2 ev aluates to true iff coalition B has a strategy to reac h S . Moreo v er, there are k l coaliti ons of size l , eac h of whic h is h andled b y a circuit of p l + 1 no des. Th e resu lting circuit thus h as ( p + 1) k + 2 k no des, whic h is p olynomial in the size of the in put. This circuit is thus an A C 0 circuit. It simply remains to retur n the result corresp onding to the coalition A . This is easily ac hieved in AC 0 . 3.2. Mo del c heck ing A T L on implicit CGSs. Assuming that the transitions issued from ℓ are giv en —in the transition table— by th e sequence (( ϕ 0 , ℓ 0 ) , ( ϕ 1 , ℓ 1 ) , . . . , ( ϕ n , ℓ n )), w e hav e: ℓ ∈ CPr e ( A, S ) iff there exists m A ∈ Mov ( ℓ, A ), s.t. there is no m ¯ A ∈ Mov ( ℓ, Agt \ A ) and ℓ i ∈ Loc \ S s .t. 3 ϕ i [ m A ⊕ m ¯ A ] ≡ ⊤ and ϕ j [ m A ⊕ m ¯ A ] ≡ ⊥ for any j < i . Thus we lo ok for a mo ve m A ∈ Mov ( ℓ, A ) s.t. f or all m ¯ A ∈ Mov ( ℓ, ¯ A ), th e n ega tion of W ℓ i ∈ Loc \ S ( ϕ i [ m A ] ∧ V j i , the execution go es directly to q ⊤ , and th e form ula is fulfilled. With Prop osition 3.4, this implies: Theorem 3.7. Mo del che cking A TL on implicit CGSs is ∆ P 3 -c omplete. 3.3. Mo del c hecking A TL on A T Ss. F or A TS s also, computing CPr e (and thus mo del- c h ec king A TL ) cannot b e ac hieved in PT IME . A direct corollary of [JD05, Lemma 4] is: Prop osition 3.8. Computing CPr e in A TSs is NP -c omp lete. Pr o of. Algorithm 2 s ho ws ho w to compute CPr e in NP in A TSs: it amounts to guessing a mov e for eac h pla yer in the coalition, and to c h ec k whether the resulting p ossible next states are all in S . Pro cedure CPre ( A , S ) b egin W ← ∅ ; foreac h q ∈ C do foreac h a ∈ A do //Guess a move for player a from a state q m a ← guess ( q , a ); if T a ∈ A m a ⊆ S then W ← W ∪ { q } ; return W ; end Algorithm 2 : C omputing CPr e for A TS Again, NP -hardness follo ws fr om [J D05, Lemma 4 ]. W e prop ose here a sligh tly different pro of, that will b e a first step to the ∆ P 2 -hardness p ro of b elo w. The pr oof is a direct reduction from 3SA T : let I = ( S 1 , ..., S n ) b e an in stance of 3SA T o ver v ariables X = { x 1 , ..., x m } . W e assu me that S j = α j, 1 s j, 1 ∨ α j, 2 s j, 2 ∨ α j, 3 s j, 3 where s j,k ∈ X and α j,k ∈ { 0 , 1 } indicates w hether v ariable s j,k is tak en negativ ely (0) or p ositiv ely (1) . W e assume w ithout loss of generalit y th at no clauses con tain b oth one prop osition and its negation. With suc h an ins tance, w e asso ciate the follo wing A TS A . It con tains 8 n + 1 stat es: one state q , and, for eac h clause S j , eig h t states q j, 0 to q j, 7 . Int uitiv ely , the state q j,k corresp onds 12 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY to a clause B j,k = k 1 s j, 1 ∨ k 2 s j, 2 ∨ k 3 s j, 3 , where k 1 k 2 k 3 corresp onds to the b in ary n otat ion for k . There is only one atomic prop osition α in our A TS: a state q j,k is lab eled with α iff it do es not corresp ond to clause S j . By construction, for eac h j , only one of the s tate s q j, 0 to q j, 7 is n ot lab eled w ith α . There are m + 1 pla y ers, wh ere m is the n um b er of v ariables that app ear in I . With eac h x i is asso ciat ed a pla y er A i . Th e extra pla ye r is named D . On ly the transitions from q are relev ant f or th is r eduction. W e ma y assume that the other states only carry a self-lo op. In q , pla yer A i decides th e v alue of x i . Sh e can th us c ho ose b et ween tw o sets of n ext states, namely the states corresp onding to clauses that are not made true b y her c h oice: { q j,k | ∀ l ≤ 3 . s j,l 6 = x i or α i,l = 0 } if x i = ⊤ { q j,k | ∀ l ≤ 3 . s j,l 6 = x i or α i,l = 1 } if x i = ⊥ Last, pla ye r D h as n c hoices, namely { q 1 , 0 , ..., q 1 , 7 } to { q n, 0 , ..., q n, 7 } . W e first prov e the singleton requirement f or A TSs’ transitions: the in tersectio ns of the c h oice s of the agent s m u st b e a singleton. Once play ers A 1 to A m ha v e c hosen their mo ve s, all the v ariables ha v e b een assigned a v alue. Under th at v aluation, for ea c h j ≤ n , exactly one clause among B j, 0 to B j, 7 ev aluates to false (thanks to our requiremen t that a literal cannot app ear together w ith its negation in the same clause). In tersecti ng with the c hoice of pla yer D , w e end up with one single state (corresp ondin g to the only clause, among those c h osen by D , that ev aluates to false). No w, let ϕ = h h A 1 , ..., A m i i X α . That q | = ϕ indicates that pla y ers A 1 to A m can choose a v aluati on for x 1 to x m s.t. pla y er D will not b e able to find a clause o f th e original instance ( i.e. , not lab eled with α ) that ev aluates to false ( i.e . , that is not made true b y an y of the c h oice s of the p la ye rs A 1 to A m ). I n that case, the instance is satisfiable. Con v ersely , if the instance is satisfiable, it suffices f or the p la ye rs A 1 to A m to pla y according to a satisfying v aluation of v ariables x 1 to x m . Since this v aluation mak es all the original clauses true, it yields a strategy that only leads to states lab eled w ith α . As in the case of imp licit CGS s, we com bine th e fixp oin t expressions of A TL mo dalities together with the NP algorithm for computing CPr e . Th is yield a ∆ P 2 algorithm for full A TL : Prop osition 3.9. Mo del che c k ing A TL over A TSs is in ∆ P 2 . This turns out to b e optimal: Prop osition 3.10. Mo del che cki ng A TL on A TSs is ∆ P 2 -har d. Pr o of. Th e pro of is by a reduction of the ∆ P 2 -complete problem SNS A T [LMS01]: SNSA T: Input:: p families of v ariables X r = { x 1 r , ..., x m r } , p v ariables z r , p b o olean formulae ϕ r in 3-CNF, with ϕ r in v olving v ariables in X r ∪ { z 1 , ..., z r − 1 } . Output:: The v alue of z p , defined by z 1 def = ∃ X 1 . ϕ 1 ( X 1 ) z 2 def = ∃ X 2 . ϕ 2 ( z 1 , X 2 ) z 3 def = ∃ X 3 . ϕ 3 ( z 1 , , z 2 , X 3 ) . . . z p def = ∃ X p . ϕ p ( z 1 , ..., z p − 1 , X p ) ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 13 Let I b e an instance of SNSA T, where w e assume th at eac h ϕ r is made of n clauses S 1 r to S n r , with S j r = α j, 1 r s j, 1 r ∨ α j, 2 r s j, 2 r ∨ α j, 3 r s j, 3 r . Again, such an instance un iquely defines a v aluation v I for v ariables z 1 to z r , that can b e extended to the whole set of v ariables b y c h oosing a witnessing v aluation for x 1 r to x n r when z r ev aluates to true. W e no w d escrib e the A T S A : it con tains (8 n + 3) p states: • p states q r and p states q r , • p states s r , • and for eac h form u la ϕ r , for eac h cl ause S j r of ϕ r , eigh t states q j, 0 r , ..., q j, 7 r , as in the previous reduction. States s r are lab elled with the atomic pr op osition s , and states q j,k r that do not corresp ond to clause S j r are labeled with α . There is one play er A j r for eac h v ariable x j r , one p la ye r C r for eac h z r , plus one extra pla y er D . As regards transitions, th ere are self-lo ops on eac h state q j,k r , single transitions from eac h q r to the corresp onding s r , and f rom eac h s r to the corresp onding q r . F rom state q r , • pla yer A j r will c ho ose the v alue of v ariable x j r , b y selecting one of the follo wing tw o sets of states: { q g ,k r | ∀ l ≤ 3 . s g ,l r 6 = x j r or α g ,l r = 0 } ∪ { q t , q t | t < r } if x j r = ⊤ { q g ,k r | ∀ l ≤ 3 . s g ,l r 6 = x j r or α g ,l r = 1 } ∪ { q t , q t | t < r } if x j r = ⊥ Both c h oices also allo w to go to one of the state s q t or q t . In q r , pla y ers A j t with t 6 = r ha v e one single choice , which is the wh ole set of states. • pla yer C t also chooses f or the v alue of th e v ariable it represents. As for p la ye rs A j r , this c h oice will b e expressed by choosing b et wee n t w o sets of states corresp on d ing to clauses that are not made tru e. But as in the pr oof of Pr op. 3.5, pla y ers C t will also offer th e p ossibilit y to “v er if y ” th eir c hoice, b y going either to state q t or q t . F ormally , th is yields t wo sets of states: { q g ,k r | ∀ l ≤ 3 . s g ,l r 6 = z t or α g ,l r = 0 } ∪ { q u , q u | u 6 = t } ∪ { q t } if z t = ⊤ { q g ,k r | ∀ l ≤ 3 . s g ,l r 6 = z t or α g ,l r = 1 } ∪ { q u , q u | u 6 = t } ∪ { q t } if z t = ⊥ • Last, pla ye r D chooses either to c hallenge a pla ye r C t , w ith t < r , by choosing the set { q t , q t } , or to c h ec k that a clause S j r is fulfilled, by c ho osing { q j, 0 r , ..., q j, 7 r } . Let us fi rst pro ve that an y choi ces of all the play ers yields exactly one state. It is obvious except for states q r . F or a state q r , let us fir st restrict to th e c h oices of all the pla yers A j r and C r , then: • if we only consider s tates q 1 , 0 r to q n, 7 r , the same argum en t as in the pr evious pro of ensures that precisely on state p er clause is chose n, • if we consider states q t and q t , the c hoices of play ers B t ensure th at exactly one state has b een chosen in eac h pair { q t , q t } , f or eac h t < r . Clearly , the c hoice of pla yer D will s elect exactly one of the remaining state s. No w, w e build the A TL form ula. It is a r ecursiv e form u la (very similar to the one used in the pro of of Prop. 3.5), defined b y ψ 0 = ⊤ and (a gain writing A C for the set of pla y ers { A 1 1 , ..., A m p , C 1 , ..., C p } ): ψ r +1 def = h h AC i i ( ¬ s ) U ( α ∨ EX ( s ∧ EX ¬ ψ r )) . 14 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY Then, wr iting f I for th e state-based strategy associated to v I : Lemma 3.11. F or any r ≤ p and t ≥ r , the fol lowing statements ar e e quivalent: (a) q r | = ψ t ; (b) the str ate gies f I witness the fact that q r | = ψ t ; (c) variable z r evaluates to true in v I . Pr o of. W e pro ve b y induction on r that (a) implies (c) and that (c) implies (b) , the last implication b eing obvio us. F or r = 1, since no s -state is r eac hable, it amoun ts to the previous pro of of NP -hardness. Assume the resu lt holds up to ind ex r . Then, if q r +1 | = ψ t +1 for s ome t ≥ r , we pick a strategy f or coalition AC witnessing this pr op ert y . Aga in, we consider the d ifferen t p ossible c h oice s a v ailable to p la y er D : • if p la y er D c ho oses to go to one of q u and q u , with u < r + 1: the execution ends up in q u if play er C u c h ose to set z u to true. But in that case, formula ψ t +1 still holds in q u , which yields b y i.h. that z u really ev aluates to true in v I . Conv ersely , the execution en d s u p in q u if pla y er C u set z u to false. In that case, we get that q u | = ¬ ψ t , with t ≥ u , whic h en tails b y i.h. that z u ev aluates to false. This first case en tails that play er C 1 to C r c h ose the correct v alue for v ariables z 1 to z r . • if p la y er D c h ooses a set of eigh t states corresp ond ing to a clause S j r +1 , then the strategy of other pla yers en s ures that the execution will reac h a state lab eled w ith α . As in the previous reduction, this in dicates that the corresp onding clause has b een made true b y the c hoices of the other pla yers. Putting all together, this pro ves that v ariable z r +1 ev aluates to true. No w, if v ariable z r +1 ev aluates to true, Assume the pla yers in AC pla y according to v aluation f I . Then • if pla yer D chooses to go to a set of states that corresp ond to a clause of ϕ r +1 , he will necessarily end up in a state that is lab eled w ith α , since the clause is made true by the v aluation w e selected. • if play er D chooses to go to one of q u or q u , for some u , then he will c hallenge p la ye r B u to prov e that his choi ce was correct. By i.h., and since play er B u pla y ed according to f I , form ula ( ¬ s ) U ( α ∨ EX ( s ∧ EX ¬ ψ t +1 )) will b e s atisfied, for an y t ≥ u . W e end u p with the p recise complexit y of A TL mo del-c hec king on A TS s: Theorem 3.12. Mo del che c king A TL on A TSs is ∆ P 2 -c omplete. 3.4. Bey ond A T L . As for classical branching-ti me temp oral logics, we ca n consider several extensions o f A TL b y allo wing more possib ilitie s in the wa y of com bining quan tifiers o ver strategies and temp oral mo dalities. W e defin e A TL ⋆ [AHK02] as follo w s : Definition 3.13. The sy ntax of A TL ⋆ is d efined by the follo wing grammar: A TL ⋆ ∋ ϕ s , ψ s ::= ⊤ | P | ¬ ϕ s | ϕ s ∨ ψ s | h h A i i ϕ p ϕ p , ψ p ::= ϕ s | ¬ ϕ p | ϕ p ∨ ψ p | X ϕ p | ϕ p U ψ p where P and A range o ve r AP and 2 Agt , resp. ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 15 The size and D AG-siz e of an A TL ⋆ form ula are defined in the s ame wa y as f or A TL . A TL ⋆ form ulae are in terpreted o ver states of a game structure S , the semantics of the main mo dalities is as follo ws (if ρ = ℓ 0 ℓ 1 . . . , we w rite ρ i for th e i + 1-st su ffix, starting from ℓ i ): ℓ | = S h h A i i ϕ p iff ∃ F A ∈ Strat ( A ) . ∀ ρ ∈ Out ( ℓ, F A ) . ρ | = S ϕ p , ρ | = S ϕ s iff ρ [0] | = S ϕ s ρ | = S X ϕ p iff ρ 1 | = S ϕ p , ρ | = S ϕ p U ψ p iff ρ i | = S ψ p and ∀ 0 ≤ j < i. ρ j | = S ϕ p A TL is the fragmen t of A TL ⋆ where eac h mo dalit y U or X has to b e preceded by a strategy quan tifier h h A i i . S everal other fragmen ts of A T L ⋆ are also classically defined: • A TL + is the r estrictio n of A TL ⋆ where a strategy quan tifier h h A i i has to b e inserted b et wee n t wo em b edd ed temp oral mod alities U or X but b oolean com bin ation are allo w ed. • EA TL exte nds A TL b y allo wing the op erators h h A i i G F (often denoted as h h A i i ∞ F ) and h h A i i F G (often written h h A i i ∞ G ). They are esp ecial ly u seful to exp r ess fairness prop erties. F or instance, h h A i i F P 1 ∧ F P 2 ∧ P 3 U P 4 is in A T L + , h h A i i F P 1 ∧ h h A ′ i i ∞ F P 2 is in EA T L , h h A i i F P 1 ∧ P 2 U ( P 3 ∧ F P 4 ) is in A T L ⋆ . 3.4.1. Mo del che cking A T L + . First note that A TL + extends A TL and allo w s to expr ess prop er- ties with more succinct form ulae [Wil99 , AI01] b ut these t wo logics h a ve the same expressive p o w er: ev ery A T L + form ula can b e tr an s late d in to an equiv alen t A TL formula [HRS02]. The complexit y of mod el c hec king A TL + o ver A TSs has b een settled ∆ P 3 -complete in [Sc h04]. But the ∆ P 3 -hardness pro of of [Sc h04] is in LOGSP A CE only w.r.t. the D AG- size of the formula. Belo w, we pro v e that mod el c h ec king A TL + is ∆ P 3 -complete (with the classical d efinition of the size of a formula) for our three kin ds of game stru ctur es. Prop osition 3.14. Mo del che cki ng A TL + c an b e achieve d in ∆ P 3 on implicit CGSs. Pr o of. A ∆ P 3 algorithm is giv en in [Sch04] for explicit CGSs. W e exte nd it to handle implicit CGS s: f or eac h subformula of the form h h A i i ϕ , guess (stat e-based) strateg ies for pla y ers in A . In eac h state , the choi ces of eac h pla y er in A can b e replaced in the transition functions. W e then w an t to compute the set of states where the C TL + form ula A ϕ h olds. This can b e ac hieved in ∆ P 2 [CES86, LMS01], but requires to fi rst compute the p ossible transitions in the remaining structure, i.e. , to c heck wh ic h of the tr an s ition formulae are satisfiable. T his is done by a p olynomial num b er of in d ep enden t calls to an NP oracle, and th us d oes not increase the complexit y of the algorithm. Prop osition 3.15. Mo del che c k ing A TL + on turn-b ase d two-player explicit CGSs is ∆ P 3 - har d. Pr o of. Th is r eduction is a quite straigh tforward extension of the one presen ted in [LMS01] for CTL + . In particular, it is qu ite differen t from the pr evious reductions, since th e b o olea n form ulae are now enco ded in the A TL + form ula, and not in the mo del. 16 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY W e enco de an instance I of SNSA T 2 , k eepin g the notati ons u s ed in th e p ro ofs o f Prop. 3.5 (for the SNSA T 2 problem) and 3.10 (for clause num b er in g). Fig. 3 d epicts the tu r n- based t w o-play er CGS C asso ciated to I . S tate s s 1 to s m are lab eled by atomic prop osition s , z p z p z p − 1 z p − 1 z 1 z 1 s p s p − 1 s 1 x 1 1 x 1 1 x 2 1 x 2 1 x n m x n m y 1 1 y 1 1 y 2 1 y 2 1 y n m y n m con tr olle d by pla y er A con tr olle d by pla y er B Figure 3: The CGS C states z 1 to z m are lab eled by at omic prop osition z , and the other states are lab eled by t heir name as shown on Fig. 3. The A TL + form ula is built recursiv ely , w ith ψ 0 = ⊤ and ψ k +1 = h h A i i [ G ¬ s ∧ G ( z → EX ( s ∧ EX ¬ ψ k )) ∧ ^ w ≤ p [( F z w ) → ^ j ≤ n _ k ≤ 3 F l j,k w ]] where l j,k w = v when s j,k w = v and α j,k w = 1, and l j,k w = v when s j,k w = v and α j,k w = 0. W e then ha ve : Lemma 3.16. F or any r ≤ p and t ≥ r , the fol lowing statements ar e e quivalent: (a) z r | = ψ t ; (b) the str ate gies f I witness the fact that q r | = ψ t ; (c) variable z r evaluates to true in v I . When r = 1, since no s - or z -state is r eac hable from z 1 , the fact th at z 1 | = ψ t , w ith t ≥ 1, is e quiv alen t to z 1 | = h h A i i V j W k F l j,k 1 . This in turn is equiv alent to the fact that z 1 ev aluates to true in I . W e n o w tur n to the ind uctiv e case. I f z r +1 | = ψ t +1 with t ≥ r , consider a strategy for A s.t. all the outcomes satisfy the prop ert y , and pic k one of those outcomes, sa y ρ . Since it cannot run in to any s -state , it defin es a v aluation v ρ for v ariables z 1 to z r +1 and x 1 1 to x n m in the obvious wa y . Eac h time the outcome runs in some z u -state, it satisfies EX ( s ∧ EX ψ t ). Eac h time it runs in some z u -state, the suffix of the ou tcome witnesses formula ψ t +1 in z u . Both case s en tail, thanks to the i.h., that v ρ ( z u ) = v I ( z u ) for any u < r + 1. No w, the subformula V w [( F z w ) → V j ≤ n W k ≤ 3 F l j,k w , wh en w = r + 1, enta ils that ϕ r +1 is indeed satisfied w hatev er the v alues of the y j r +1 ’s, i.e. , that z r +1 ev aluates to true in I . Con v er s ely , if z r ev aluates to tru e, th en strategy f I clearly witnesses the f act that ψ t holds in state z r . As an immediate corollary , w e end up with: Theorem 3.17. Mo del che cking A T L + is ∆ P 3 -c omplete on A TSs as wel l as on explicit CGSs and implicit CGSs. ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 17 3.4.2. Mo del che cking EA TL . In the classical br anc hing-time temp oral logics, a dding the mo dalit y E ∞ F to CT L increases its expressiv e p ow er (see [Eme90]), this is also tru e w hen considering alternating-ti me temp oral log ics, as we will see in S ecti on 4.2.2. F rom the theoretical-c omplexit y p oin t of view, there is no difference b et wee n A TL and EA TL : Theorem 3.18. Mo del che c king EA TL is: • PTIME -c omplete over explicit CGSs; • ∆ P 2 -c omplete over A TSs; • ∆ P 3 -c omplete over implicit CGSs. Pr o of. W e extend the mo del-c hec kin g algorithm for A TL . This is again ac hiev ed b y express- ing mod alitie s h h A i i ∞ F and h h A i i ∞ G as fix p oin t form ulas [dAHM01 ]: h h A i i ∞ F p ≡ ν y .µx. ( h h A i i X ( x ) ∨ ( p ∧ h h A i i X ( y )) ) h h A i i ∞ G p ≡ µy .ν x. ( h h A i i X ( x ) ∧ ( p ∨ h h A i i X ( y ))) Computing these fixp oin ts can again b e ac hiev ed by a p olynomial n um b er of compu ta- tions of CPr e . Hardness directly follo ws from th e hard n ess of A T L mo del c hec king. 3.4.3. A TL ⋆ mo del-che cking. When considering A T L ⋆ mo del c hec king, the complexit y is the same for explicit CGS, implicit CGS and A TS s ince it mainly comes from the formula to b e chec k ed: Theorem 3.19. Mo del che cking A TL ⋆ is 2EXPTIM E -c omplete on A TSs as wel l as on expl icit CGSs and implicit CGSs. Pr o of. W e extend the a lgorithm of [AHK02 ]. T his algorithm r ecursiv ely lab els eac h location with the sub form ulae it satisfies. F ormulas h h A i i ψ , with ψ ∈ L T L , are handled by building a deterministic Rabin tree automaton A ψ for ψ , and a B ¨ uc hi tree automato n A C ,A recognizing trees corresp onding to th e sets of outcomes of eac h p ossible strategy of coalition A in the structure C . W e refer to [AHK02] for more details on the whole pr oof, and only fo cus on the construction of A C ,A . The states of A C ,A are the states of C . F rom location ℓ , there are as man y transitions as the num b er of p ossible join t mo v es m = ( m A i ) A i ∈ A of coalitio n A . Eac h trans itio n is a set of states that s h ould app ear at the next leve l of the tree. F ormally , giv en p ∈ 2 AP , δ ( ℓ, p ) = { Next ( ℓ, A, m ) | m = ( m A i ) A i ∈ A with ∀ A i ∈ A. m A i ∈ Mov ( ℓ, A i ) } when p = Lab ( ℓ ), and δ ( ℓ, p ) = ∅ otherwise. F or explicit CGSs, this transition function is easily computed in p olynomial time. F or A TSs and implicit CGSs, th e transition function is computed by en u m erating the (ex- p onen tial) set of join t mo v es of coalition A (computing Next ( ℓ, A, m ) is p olynomial once the join t mov e is fixed). Computing A C ,A can thus b e ac hiev ed in exp onent ial time. T esting the emptiness of the pro duct automaton then requires doubly-exp onentia l time. The whole algorithm th u s runs in 2EXPTIME . Th e low er b ound directly follo ws from the lo we r b ound for explicit CGSs. 18 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY Let us finally mentio n that our resu lts could easily b e lifted to Alternating-time µ - calculus (AMC) [AHK02]: the PTIME algorithm prop osed in [AHK02] for explicit CGSs, whic h again consists in a p olynomial num b er of computations of CPr e , is r eadily adapted to A TSs and implicit CGSs: as a result, mod el c h ec king the alternation-free fragmen t has the same complexities as model c h ec king A TL , and mo del chec king the whole AMC is in EXPTIME f or our three kinds of mo dels. 4. Expressivene ss W e ha v e seen that the abilit y of quan tifying ov er the p ossible strategies of the agen ts increases the complexit y of mo del c h ecking and mak es the analysis more difficult. W e n o w tur n to expr essivit y issues. W e first fo cus on translations b etw een our differen t mo dels (explicit CGS, imp licit CGS and A TS). W e then co nsider the expr essiveness of “Un til” and “Alw a ys” mod alitie s, pro vin g that they cann ot express the dual of “Un til”. 4.1. Comparing the expressiv eness of CGSs and A TSs. W e pro v e in this section that CGSs and A TSs are closely related: they can mod el the same concurrent games. In order to m ak e this statemen t formal, w e u se the follo wing defin itio n: Definition 4.1 ([AHKV9 8]) . Let A and B b e tw o mo dels of concurrent games (either A TS s or C GSs) o v er the same set Agt of agen ts. Let R ⊆ Loc A × Loc B b e a (non-empt y) r elat ion b et ween states of A and states of B . That relatio n is an alternating bisimulation when, for an y ( ℓ, ℓ ′ ) ∈ R , the follo w ing conditions h old: • Lab A ( ℓ ) = Lab B ( ℓ ′ ); • for any coalition A ⊆ Agt , we ha v e ∀ m : A → Mov A ( ℓ, A ) . ∃ m ′ : A → Mov B ( ℓ ′ , A ) . ∀ q ′ ∈ Next ( ℓ ′ , A, m ′ ) . ∃ q ∈ Next ( ℓ, A, m ) . ( q , q ′ ) ∈ R . • symmetrically , for any coalition A ⊆ Agt , w e ha ve ∀ m ′ : A → Mov B ( ℓ ′ , A ) . ∃ m : A → Mov A ( ℓ, A ) . ∀ q ∈ Next ( ℓ, A, m ) . ∃ q ′ ∈ Next ( ℓ ′ , A, m ′ ) . ( q, q ′ ) ∈ R . where Next ( ℓ, A, m ) is the set of locations that are reac hable from ℓ when eac h pla ye r A i ∈ A pla ys m ( A i ). Tw o mod els are said to b e alternating-bisimilar if there exists an alternating bisimula- tion in volving all of their lo cations. With this equ iv alence in mind , A TS s an d CGSs (b oth implicit and explicit ones) ha v e the same expressive p o w er 4 : Theorem 4.2. (1) Any explicit CGS c an b e tr anslate d into an alt ernating-bisimilar implicit one in line ar time; (2) Any implicit CGS c an b e tr anslate d into an alternating-bisimilar explicit one in exp onential time; (3) Any explicit CGS c an b e tr anslate d into an alternating-bisimilar A TS in cubic time; 4 The translations b etw een A TSs and exp licit CG Ss w as already mentio nned in [GJ04]. ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 19 (4) Any A TS c an b e tr anslate d into an alternating-bisimilar explicit CGS in exp onentia l time; (5) Any implicit CGS c an b e tr anslate d into an alternating-bisimilar A TS in exp onential time; (6) Any A TS c an b e tr anslate d into an alternating-bisimilar implicit CGS in quadr atic time; Figure 4 su mmarizes those results. F rom our complexit y r esults (and the assumption that th e p olynomial-ti me hierarc h y do es not colla pse), th e costs of the ab o v e translations is optimal. A TS explicit CGS implicit CGS (4) exp onential (3) cub ic (6) qu adratic (5) exp onential (1) linear (2) exp onential Figure 4: Costs of trans lations b et w een the three m od els Pr o of. Poi n ts 1, 2, and 4 are reasonnably easy . F or p oin t 6, it suffices to write, for eac h p ossible next lo cation, the conjunction (o n eac h agen t) of the d isjunction of the c hoices that con tain that next location. F or instance, if we ha v e Mov A ( ℓ 0 , A 1 ) = {{ ℓ 1 , ℓ 2 } , { ℓ 1 , ℓ 3 }} and Mov A ( ℓ 0 , A 2 ) = {{ ℓ 2 , ℓ 3 } , { ℓ 1 }} in the A T S A , then eac h pla y er w ill hav e t wo c hoices in the asso ciated CGS B , and Edg B ( ℓ 0 ) = ( A 1 = 1 ∨ A 1 = 2) ∧ ( A 2 = 2) , ℓ 1 ( A 1 = 1) ∧ ( A 2 = 1) , ℓ 2 ( A 1 = 2) ∧ ( A 2 = 1) , ℓ 3 F ormally , let A = ( Agt , Loc A , AP , Lab A , Mov A ) b e an A T S. W e then defi ne B = ( Agt , Lo c B , AP , Lab B , Mov B , Edg B ) as follo w s : • Loc B = Loc A , La b B = Lab A ; • Mov B : ℓ × A i → [1 , | Mov A ( ℓ, A i ) | ]; • Edg B is a fun ction mapping eac h location ℓ to the sequence (( ϕ ℓ ′ , ℓ ′ )) ℓ ′ ∈ Loc A (the ord er is not imp ortan t here, as the form ulas will b e mutually exclusive) w ith ϕ ℓ ′ = ^ A i ∈ Agt _ ℓ ′ appears in the j -th set of Mo v A ( ℓ,A i ) A i ? = j ! Computing Edg B requires quadratic time (more p recisely O ( | Loc A | × | Mov A | )). It is now easy to pro v e that the id en tit y I d ⊆ L oc A × Loc B is an alternating b isimulation, since there is a direct corresp ondance b etw een the choic es in b oth structures. W e now exp lain h o w to transform an explicit CGS in to an A TS , showing p oin t 3. Let A = ( Agt , Loc A , AP , Lab A , Mov A , Edg A ) b e an explicit CGS. W e d efine the A TS B = ( Agt , Lo c B , AP , Lab B , Mov B ) as follo ws (see Figure 5 for more in tuition on the construction): 20 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY • Loc B ⊆ Loc A × Loc A × N k , where k = | Ag t | , with ( ℓ, ℓ ′ , m A 1 , . . . , m A k ) ∈ Lo c B iff ℓ = Edg A ( ℓ ′ , m A 1 , . . . , m A k ); • Lab B ( ℓ, ℓ ′ , m A 1 , . . . , m A k ) = Lab A ( ℓ ); • F rom a lo cation q = ( ℓ, ℓ ′ , m A 1 , . . . , m A k ), pla ye r A j has | Mov A ( ℓ, A j ) | p ossible mo v es: Mov B ( q , A j ) = n ( ℓ ′′ , ℓ, m ′ A 1 , . . . , m ′ A j = i, . . . , m ′ A k ) | m ′ A n ∈ Mov A ( ℓ, A n ) and ℓ ′′ = Edg A ( ℓ, m A 1 , . . . , m A j = i, . . . , m A k ) | i ∈ Mov A ( ℓ, A j ) o This A T S is bu ilt in time O ( | Loc A | 2 · | E dg A | ). It remains to sho w alternating b isimilarit y b et ween th ose structures. W e define the relation R = { ( ℓ, ( ℓ, ℓ ′ , m A 1 , . . . , m A k )) | ℓ ∈ Loc A , ( ℓ, ℓ ′ , m A 1 , . . . , m A k )) ∈ Loc B } . It is n o w only a matter of br a ve ry to prov e that R is an alternating b isim ulation b et wee n A and B . P oin t 5 is no w immediate (thr ough explicit C GSs), b u t it could also b e prov ed in a similar w ay as p oin t 3. Let us mentio n that our translations are optimal (up to a p olynomial): our exp onen tial translations cann ot b e ac hiev ed in p olynomial time b ecause of our complexit y results for A TL mo del-c h ec king. Note that it do es not mean that the resu lting str u ctures m ust ha v e exp onen tial size. b a d c h 3 . 1 i h 2 . 2 i , h 2 . 3 i h 1 . 1 i h 1 . 2 i h 1 . 3 i h 2 . 1 i h 3 . 2 i h 3 . 3 i Mo ves from lo cation A : Pla yer 1 mo v e 1: { b a, 1 , 1 , d a, 1 , 2 , d a, 1 , 3 } mo v e 2: { c a, 2 , 2 , c a, 2 , 3 , d a, 2 , 1 } mo v e 3: { a a, 3 , 1 , d a, 3 , 2 , d a, 3 , 3 } Pla yer 2 mo v e 1: { a a, 3 , 1 , b a, 1 , 1 , d a, 2 , 1 } mo v e 2: { c a, 2 , 2 , d a, 1 , 2 , d a, 3 , 2 } mo v e 3: { c a, 2 , 3 , d a, 1 , 3 , d a, 3 , 3 } Figure 5: Conv erting an explicit CGS in to an A TS 4.2. Some remarks on the expressiv eness of A TL . 4.2.1. h h A i i R c annot b e expr esse d with h h A i i U and h h A i i G . In the original pap ers defin- ing A T L [AHK97, AHK02], the syntax of that logi c w as slightl y differen t f rom the one we used in this pap er: follo wing classica l defin itions of th e syntax of CTL , it wa s d efined as: A TL orig ∋ ϕ s , ψ s ::= ⊤ | p | ¬ ϕ s | ϕ s ∨ ψ s | h h A i i ϕ p ϕ p ::= X ϕ s | G ϕ s | ϕ s U ψ s . Dualit y is a fun damen tal concept in mo dal and temp oral logics: for instance, the d u al of mod alit y U , often denoted b y R and read r ele ase , is defined by p R q def ≡ ¬ (( ¬ p ) U ( ¬ q )). ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 21 Dual modalities allo w, for instance, to p ut n egations inner inside th e formula, whic h is often an imp ortan t prop erty when m an ip ulating formula s. In L TL , m o dalit y R can b e expr essed using only U and G : p R q ≡ G q ∨ q U ( p ∧ q ) . (4.1) In the same wa y , it is w ell known that CT L can b e defined using only mod aliti es EX , EG and EU , and that we hav e E p R q ≡ EG q ∨ E q U ( p ∧ q ) A p R q ≡ ¬ E ( ¬ p ) U ( ¬ q ) . It is easily seen that, in the case of A TL , it is n ot the case that h h A i i p R q is equiv alen t to h h A i i G q ∨ h h A i i q U ( p ∧ q ): it could b e the case that part of the o utcomes satisfy G q and the other ones satisfy q U ( p ∧ q ). In fact, we pro ve th at A TL orig is strictly less exp ressiv e than A TL : Theorem 4.3. Ther e is no A TL orig formula e qui valent to Φ = h h A i i ( a R b ) . The pro of of Theorem 4.3 is based on tec hn iques similar to those u sed for pro ving expressiv eness results f or temp oral logics like CTL or EC TL [Em e90]: w e b uild tw o families of mod els ( s i ) i ∈ N and ( s ′ i ) i ∈ N s.t. (1) s i 6| = Φ, (2) s ′ i | = Φ for any i , and (3) s i and s ′ i satisfy the same A TL orig form ula of size less than i . T h eorem 4.3 is a direct consequence of the existence of such families of mo dels. In order to simplify th e presentati on, the theorem is pro v ed f or form ula 5 Φ = h h A i i ( b R ( a ∨ b )). The mo dels are describ ed b y one single inductive CGS 6 C , inv olving t wo play ers. It is depicted on Fig. 6 . A lab el h α, β i on a transition indicates that this transition corresp onds a a i a s i − 1 a a i − 1 a s 1 a a 1 b b i b b 1 a s i a s ′ i a s ′ i − 1 a s ′ 1 ¬ a, ¬ b s 0 h 3 , 1 i h 3 , 1 i h 3 , 1 i h 3 , 1 i , h 4 , 2 i h 3 , 1 i , h 4 , 2 i h 3 , 1 i , h 4 , 2 i h 2 , 2 i h 2 , 3 i h 2 , 2 i h 2 , 3 i h 2 , 2 i h 2 , 3 i h 2 , 2 i h 2 , 3 i h 4 , 3 i h 2 , 2 i h 2 , 3 i h 4 , 3 i h 2 , 2 i h 2 , 3 i h 4 , 3 i h 1 , 1 i h 1 , 1 i h 1 , 1 i h 4 , 1 i h 1 , 1 i h 4 , 1 i h 1 , 2 i , h 1 , 3 i h 2 , 1 i , h 3 , 2 i , h 3 , 3 i h 1 , 2 i , h 1 , 3 i h 2 , 1 i , h 3 , 2 i , h 3 , 3 i h 1 , 2 i , h 1 , 3 i , h 2 , 1 i , h 3 , 2 i , h 3 , 3 i h 1 , 2 i , h 1 , 3 i , h 2 , 1 i , h 3 , 2 i , h 3 , 3 i Figure 6: The CGS C , with states s i and s ′ i on the left to mov e α of play er A 1 and to mo ve β of pla yer A 2 . In that CGS, states s i and s ′ i only differ in that pla y er A 1 has a fourth p ossible mo v e in s ′ i . This ensures that, fr om state s ′ i (for an y i ), pla yer A 1 has a strategy (namely , he should alwa ys play 4) for enforcing a W b . 5 This form u la can also be written h h A i i a W b , where W is the “w eak until” mo dalit y . 6 Give n the translation from CGS to A TS (see Section 4.1), the result also holds for A TSs. 22 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY But this is not th e case from state s i : b y indu ctio n on i , one can p ro ve s i 6| = h h A 1 i i a W b . The base case is trivial. No w assume the prop ert y holds for i : from s i +1 , any strategy for A 1 starts w ith a mo v e in { 1 , 2 , 3 } and for any of these c hoices, pla y er A 2 can c ho ose a mo ve (2, 1 and 2 resp.) that en force the next stat e to b e s i where by i.h. A 1 has no strategy for a W b . W e now pro v e that s i and s ′ i satisfy the same “small” formulae. First, we h a ve the follo wing equ iv alences: Lemma 4.4. F or any i > 0 , for any ψ ∈ A TL orig with | ψ | ≤ i : b i | = ψ iff b i +1 | = ψ (4.2) s i | = ψ iff s i +1 | = ψ (4.3) s ′ i | = ψ iff s ′ i +1 | = ψ (4.4) Pr o of. Th e pro of pr o ceeds b y in d uction on i , and on the structure of the formula ψ . Base case: i = 1. Since w e require that | ψ | ≤ i , ψ can only b e an atomic pr op osition. The result is then ob vious. Induction step. W e assume the resu lt holds u p to some i − 1 ≥ 1, and prov e that it then still h olds for i . Let ψ s.t. | ψ | ≤ i . W e no w pro ceed by str u ctural indu ctio n on ψ : • The result is again ob vious for atomic prop ositions, as w ell as for b o olean com binations of subformula e. • Otherwise, th e “ro ot” com binator of ψ is a m o dalit y . If it is a CTL m o dalit y , the results are quite straig h tforw ard. Also, since there is only one transition f rom b i , an y A T L orig mo dalit y can b e expr essed as a CTL mo dalit y in that state, and (4.2) follo ws. • If ψ = h h A 1 i i X ψ 1 : Assume s i | = ψ . T h en, d ep ending on the strategy , either b i and s i − 1 , or a i and s i − 1 , or s i and s i − 1 , sh ould satisfy ψ 1 . By i.h., this propagates to th e next lev el, and the same strategy ca n b e mimic k ed from s i +1 . The conv erse is similar (hence (4.3)), as w ell as the pro of for (4.4). • If ψ = h h A 1 i i G ψ 1 : If s i | = ψ , then s i , thus s i +1 , satisfy ψ 1 . Pla ying mov e 3 is a strategy for pla y er A 1 to enforce G ψ 1 from s i +1 , since the game will either sta y in s i +1 or go to s i , where pla ye r A has a winning strategy . The con verse is immediate, as pla ye r A 1 cannot a void s i when pla ying from s i +1 . Hence (4.3 ) for h h A 1 i i G -form ulae. If s ′ i | = ψ , then b oth s ′ i and s ′ i +1 satisfy ψ 1 . Also, play er A 1 cannot a v oid the play to go in lo cation s i − 1 . Thus, s i − 1 | = ψ 1 —and by i.h., so d oes s i — an d s i | = ψ , as ab ov e. No w , follo wing the same strategy in s ′ i +1 as th e winnin g strategy of s ′ i clearly enforces G ψ 1 . The con v erse is s im ilar: it suffi ces to mimic, from s ′ i , the strategy witn essin g the fact that s ′ i +1 | = ψ . T his pr o ve s (4.4), and concludes this case. • If ψ = h h A 1 i i ψ 1 U ψ 2 : If s i | = ψ , then either ψ 2 or ψ 1 holds in s i , th us in s i +1 . The former case is trivial. In th e latter, pla yer A 1 can mimic th e win ning strategy in s i +1 : the game will end up in s i , with intermediary states satisfying ψ 1 (or ψ 2 ), and h e can th en apply the original strategy . The con v erse is obvious, sin ce from s i +1 , pla ye r A 1 cannot av oid location s i , from wh ic h he must also ha v e a winning strategy . If s ′ i | = ψ , omitting the trivia l case where s ′ i satisfies ψ 2 , w e h a ve that s i − 1 | = ψ . Also, a (state-based) strateg y in s ′ i witnessing ψ necessary consists in pla ying mov e 1 or 2. Thus ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 23 a i and b i satisfy ψ , and the same strategy (mo v e 1 or 2, r esp.) enf orces G ψ 1 from s i . It is now easy to see that the same strategy is correct fr om s ′ i +1 . Conv ersely , apart from trivial cases, the strategy can again only consist in playing mo ves 1 or 2. In b oth case s, the game could end up in s i , and then in s i − 1 . Th us s i − 1 | = ψ , and the same strategy as in s ′ i +1 can b e applied in s ′ i to w itness ψ . • The proofs for h h A 2 i i X ψ 1 , h h A 2 i i G ψ 1 , and h h A 2 i i ψ 1 U ψ 2 are v ery similar to the previous ones. Lemma 4.5. ∀ i > 0 , ∀ ψ ∈ A T L orig with | ψ | ≤ i : s i | = ψ iff s ′ i | = ψ . Pr o of. Th e pro of pro ceeds by ind uction on i , and on the structure of the form u la ψ . The case i = 1 is trivial, since s 1 and s ′ 1 carry the same atomic prop ositions. F or the induction step, d ealing with CT L mo dalities ( h h ∅ i i and h h A 1 , A 2 i i ) is also straigh tforw ard, then we just consider h h A 1 i i - and h h A 2 i i -mod alitie s. First we consider h h A 1 i i -mod alitie s. It is w ell-known that we can restrict to state-based strategies in this setting. If pla yer A 1 has a strategy in s i to enforce something, then h e can follo w the same strategy from s ′ i . Con versely , if pla y er A 1 has a str ate gy in s ′ i to enforce some prop ert y , t w o cases ma y arise: either the strategy consists in pla yin g m ov e 1, 2 or 3, and it can b e mimic ked from s i . Or the strategy consists in pla ying mo v e 4 and w e distinguish three cases: • ψ = h h A 1 i i X ψ 1 : that mo v e 4 is a winnin g strategy entai ls th at s ′ i , a i and b i m ust satisfy ψ 1 . Then s i (b y i.h. on the formula) and s i − 1 (b y Lemma 4.4) b oth satisfy ψ 1 . Pla ying mo v e 1 (or 3) in s i ensures that the next state w ill satisfy ψ 1 . • ψ = h h A 1 i i G ψ 1 : by pla yin g mo ve 4, the game could end up in s i − 1 ( via b i ), and in a i and s ′ i . Thus s i − 1 | = ψ , and in particular ψ 1 . By i.h., s i | = ψ 1 , and pla yin g mo v e 1 (or 3) in s i , and then mimic king the original strategy (from s ′ i ), enforces G ψ 1 . • ψ = h h A 1 i i ψ 1 U ψ 2 : a strategy starting with mo v e 4 implies s ′ i | = ψ 2 (the game could sta y in s ′ i for ever). T h en s i | = ψ 2 b y i.h., and th e resu lt follo ws. W e no w turn to h h A 2 i i -mo dalities: cle arly if h h A 2 i i ψ 1 holds in s ′ i , it also holds in s i . Con- v ersely , if pla y er A 2 has a (state-based) strategy to enforce some p r op ert y in s i : If it consists in pla ying mo v es 1 or 3, then the same strategy also works in s ′ i . No w if the strateg y starts with mo ve 2, then pla ying mo v e 3 in s ′ i has the same effect, and th us enforces the same prop ert y . Remark 4.6. A TL orig and A TL ha v e the same distinguishin g p ow er as the f ragmen t of A TL in v olving only the h h · i i X mo dalit y (see [AHKV98, p roof of Th. 6]). This m eans that w e cannot exhib it t w o m od els M and M ′ s.t. (1) M | = Φ, (2) M ′ 6| = Φ, an d (3) M and M ′ satisfy the same A TL orig form ula. Remark 4.7. In [AHK02], a restriction of CGS —the turn -based C GS s— is considered. In an y lo cati on of th ese m odels (named TB-CGS hereafter), only one pla ye r h as sev eral mo v es (the other pla yers ha ve only one p ossible c hoice). Suc h models ha v e the prop erty of determine dness : giv en a set of p la y ers A , either there is a strategy for A to win some ob j ective Φ, or there is a strategy for other play ers ( Agt \ A ) to enforce ¬ Φ. In suc h systems, mo dalit y R can b e expr essed as follo ws: h h A i i ϕ R ψ ≡ TB-CGS ¬ h h Agt \ A i i ( ¬ ϕ ) U ( ¬ ψ ) . 24 F. LAROUSSINIE, N. MARKEY, AND G. OREIBY 4.2.2. h h A i i ∞ G and h h A i i ∞ F c annot b e expr esse d in A TL . It is well kn o wn that ECTL formulae of the form E ∞ F P (and its dual A ∞ G P ) cannot b e expr essed in CTL [Eme90 ]. On the other hand, the follo wing equiv alences hold: E ∞ G P ≡ EF EG P A ∞ F P ≡ AG AF P . The situation is again differen t in A T L : neither h h A i i ∞ F nor h h A i i ∞ G are expr essib le in A TL . Indeed, assume that h h A i i ∞ F could b e expr essed by the A TL form u la Φ. This holds in particular in 1-pla yer games ( i.e. , Kripke stru ctures). In the case where coalitio n A con tains the only pla y er, we w ould end up with a CTL equiv alen t of E ∞ F , whic h is known not to exist. A s imilar argument applies for h h A i i ∞ G . 5. Conclusion In this p ap er, we considered the basic questions of e xpressiv eness and complexit y of A TL . W e precisely charac terized the complexit y of A T L , A T L + , EA TL and A TL ⋆ mo del-c hecking, on b oth A TS s and CGSs, when the num b er of agen ts is not fixed . These results complete the pr eviously kno w n r esults ab out these formalisms (and corrects some of them). It is in teresting to see that their complexit y classes ( ∆ P 2 or ∆ P 3 ) are un usual in the area of mod el- c h ec king. W e also sho wed that A TL , as originaly defined in [AHK97, AHK98, AHK02], is not as expressive as it could b e exp ected, and w e argue that th e mo dalit y “Relea se” should b e add ed in its defin ition. Referen ces [AHK97] Ra jeev Alur, Thomas A. Henzinger, and Orna Ku pferman. A lternating-time temp oral logic. In Pr o c e e dings of the 38th A nnual Symp osium on F oundat ions of Computer Scienc e (FOCS’97) , pages 100–109. IEEE Comp. Soc. Press, 1997. [AHK98] Ra jeev Alur, Thomas A. Henzinger, and Orna Ku pferman. A lternating-time temp oral logic. In Willem-P aul de Roever, Hans Langmaack, and Amir Pn ueli, editors, Revise d Le ctur es of the 1st International Symp osium on Comp ositionality: The Signific ant Differ enc e (COMPOS’97) , vol ume 1536 of LNCS , pages 23–6 0. Springer, 1998. [AHK02] Ra jeev Alur, Thomas A. H enzinger, and Orna Kupferman. Alternating-time temp oral logic. Journal of the ACM , 49 (5):672–71 3, 2002. [AHKV98] Ra jeev Alur, Thomas A. H en zinger, Orn a Kupferman, and Moshe Y. V ardi. A lternating re- finement relatio ns. In Davide Sangiorg i and Rob ert d e Simone, editors, Pr o c e e dings of the 9th International C onfer enc e on C oncurr ency The ory (CONCUR’98) , volume 1466 of LNCS , pages 163–178 . Springer, 1998. [AI01] Micah Adler and Neil Immerman. An n ! lo w er b ound on form ula size. In Pr o c e e dings of the 16th Annual Symp osi um on Lo gic in Computer Scienc e (LICS’01) , pages 197–206. IEEE Comp. Soc. Press, 2001. [CE81] Edmund M. Clarke and E. Allen Emerson. Desi gn and synthesis of synchronous skeletons using branching-time temp oral logic. In Dexter Kozen, editor, Pr o c e e dings of the 3r d Workshop on Lo gics of Pr o gr ams (LOP’81) , v olume 13 1 of LNCS , pages 52–71. Springer, 1981. [CES86] Edmund M. Clarke, E. Allen Emerson, and A . Prasad S istla. Au tomatic verification of finite- state concurren t systems u sing temp oral logi c specifications. ACM T r ansact ions on Pr o gr am- ming L anguages and Systems , 8(2):244–26 3, 1986. [dAHM01] Luca de Alfaro, Thoma s A. Henzinger, and Rupak Ma jumd ar. F rom verification to control: dynamic programs for omega-regular ob jectiv es. In Pr o c e e dings of the 16th Annual IEEE Sym- p osium on L o gic in Com puter Scienc e (LICS’01) , p ages 279–290. IEEE Comp. S o c. Press, 2001. [Eme90] E. Allen Emerson. T emporal and mo dal logic. In Jan v an Leeuw en, ed itor, Handb o ok of The o- r etic al Com puter Scienc e , vo lume B, c hapter 16, pages 995 –1072. Elsevier, 1990. ON T H E EXPRESSIVENESS AND COMPLEXITY OF A T L 25 [GJ04] V alen tin Goranko and W o jciec h Jamroga. Comparing semantics of logics for m ulti-agen t sys- tems. Synthes e , 139(2), 2004. [GvD06] V alen tin Gorank o and Go v ert v an Drimmelen. Complete axiomatization and decidability of alternating-time temp oral log ic. The or etic al Com puter Scienc e , 35 3(1-3):93–11 7, March 2006. [HRS02] Aidan H arding, Mark Ryan, and Pierre-Yves Schobbens. Appro ximating A TL ∗ in A TL. In Agostino Cortesi, editor, R evise d Pap ers of the 3r d International Worksho p on V erific ation, Mo del Che cking, and Abstr act Interpr etation (VMCAI’02) , vo lume 2294 of LNC S , pages 289– 301. Springer, 2002. [JD05] W o jciech Jamroga and J ¨ u rgen Dix. Do agents make model c hecking explode (computationally)? In Michal Pec houcek , Paolo Petta, and L´ a szl´ o Zsolt V arga, editors, Pr o c e e dings of the 4th In- ternational Centr al and Eastern Eur op e an Confer enc e on Multi-A gent Systems (CEEM A S’ 05) , vol ume 3690 of LNCS . Springer, 200 5. [JD06] W o jciech Jamroga and J¨ urgen D ix . Mo del checking abilities of agen ts: A cl oser l ook. T echnical Rep ort IfI-06-02, Institut f¨ ur Informatik, T echnisc he Universit¨ at Clausthal, 2006. [JD08] W o jciech Jamroga and Juergen Dix . Model checking abilities of agents: A closer look. The ory of Computing Systems , 42(3):366–410 , 2008. [LMO07] F ran¸ cois Laroussinie, Nicola s Mark ey , and Ghassan O reiby . On the expressiv eness and com- plexity of A TL. In Helmut Seidl, editor, Pr o c e e dings of the 10th International Confer enc e on F oundations of Sof twar e Scienc e and Computation Structur es (F oSSaCS’07) , vo lume 4423 of L e ctur e Notes in Computer Scienc e , pages 243–257, Braga, Portugal, Marc h 2007. Sp ringer. [LMS01] F ran¸ cois Laroussinie, Nicolas Markey , and Philippe Schnoeb elen. Mod el c hec king CTL + and FC TL is hard. In F urio Honsell and Mari no Miculan, editors, Pr o c e e di ngs of the 4th Inter- national Confer enc e on F oundations of Softwar e Scienc e and Computation Stru ctur e (F oS- SaCS’01) , volume 2030 of LNCS , pages 318–331 . Springer, 2001. [P ap94] Christos Papadimitriou. Computational Complexity . Addison-W esley , 1994. [Pn u77] Amir Pnueli. The temp oral logic of programs . In Pr o c e e dings of the 18th Annual Symp osium on Foundations of Computer Scienc e (F OCS’77) , pages 46–57. IEEE Comp. Soc. Press, 1977. [QS82] Jean-Pierre Q ueille and Joseph Sifakis. S pecification and verification of concurrent systems in CESAR. In Mariangiola Dezani-Cia ncaglini and U go Montanari, editors, Pr o c e e dings of the 5th International Symp osium on Pr o gr amming (SOP’82) , volume 137 of LNCS , pag es 337–3 51. Springer, 1982. [Sch04 ] Pierre-Yves Schobbens. Alternating-time logic with imp erfect recall. In Pr o c e e dings of the 1st Workshop on L o gic and Communic ation in Multi-A gent Systems (LCMAS’03) , volume 85(2) of ENTCS . Elsevier, 2004. [W al04 ] I gor W alukiewicz. A landscape with games in t he background. In Pr o c e e dings of the 19th Annual Symp osium on Lo gic in Computer Scienc e (LICS’04) , pages 356–366. IEEE Comp. So c. Press, 2004. [Wil99] Thomas Wilk e. CTL + is exp onentially more succinct than CTL. In C. P andu R angan, V enk atesh Raman, and Ramasw am y Ramanuj am, editors, Pr o c e e dings of the 19th Conf er entc e on F oundations of Sof twar e T e chnolo gy and The or etic al Computer Sci enc e (FSTTCS’ 99) , vol - ume 1738 of L e ctur e Notes in C om puter Sci enc e , pages 110–121. Springer-V erlag, D ecem b er 1999. [WL WW06] Dirk W alther, Carsten Lutz, F rank W olter, and Mic hael W ooldridge. A TL satisfiabilit y is indeed EXPTIME-complete. Journal of L o gic and C omputat ion , 16(6):765–78 7, 2006. This wor k is licensed und er the Creative Commons Attr ibution-NoDer ivs License. T o view a copy of this license, visit ht tp:/ /crea tivecommons.org/licenses/by-nd/2.0/ or send a letter to Creative Commons , 559 Nathan Abbott Wa y , S tanford, California 94305, USA.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment