A Revised Scheme to Compute Horizontal Covariances in an Oceanographic 3D-VAR Assimilation System
We propose an improvement of an oceanographic three dimensional variational assimilation scheme (3D-VAR), named OceanVar, by introducing a recursive filter (RF) with the third order of accuracy (3rd-RF), instead of a RF with first order of accuracy (1st-RF), to approximate horizontal Gaussian covariances. An advantage of the proposed scheme is that the CPU’s time can be substantially reduced with benefits on the large scale applications. Experiments estimating the impact of 3rd-RF are performed by assimilating oceanographic data in two realistic oceanographic applications. The results evince benefits in terms of assimilation process computational time, accuracy of the Gaussian correlation modeling, and show that the 3rd-RF is a suitable tool for operational data assimilation.
💡 Research Summary
The paper presents a substantial improvement to the OceanVar three‑dimensional variational (3D‑VAR) data‑assimilation system by replacing the first‑order recursive filter (1st‑RF) traditionally used to approximate horizontal Gaussian background error covariances with a third‑order recursive filter (3rd‑RF). OceanVar’s background error covariance matrix B is factorised into a series of linear operators, among which the horizontal operator V_H encodes isotropic Gaussian correlations. In the original implementation V_H is realised through a 1st‑RF applied iteratively (typically five passes) to approximate the Gaussian kernel, a step that dominates the computational cost.
The authors adopt the high‑order filter theory of Young and Van Vliet (1995) and Van Vliet et al. (1998). The 3rd‑RF consists of a forward sweep and a backward sweep, each using four coefficients (α₁, α₂, α₃, β) that are analytically derived from the local correlation radius R_i and grid spacing Δx_i. The coefficients are expressed as rational functions of R_i/Δx_i, with β normalising the filter to preserve variance. This formulation allows the filter to achieve a very accurate approximation of the Gaussian impulse response in a single iteration, whereas the 1st‑RF requires many iterations to converge.
The paper provides a rigorous error analysis. For an arbitrary input field s₀, the L₂ norm of the difference between the exact Gaussian convolution (s∗ = g ⊗ s₀) and the filtered output s is bounded by the product of the L₂ norm of the impulse‑response error (‖ε_h‖) and the norm of the input (‖s₀‖). Numerical experiments on a one‑dimensional grid (m = 300 points, R = 12 000 m, Δx = 6 000 m) show that the 1st‑RF needs up to ten iterations to reach a satisfactory approximation, while the 3rd‑RF reaches an error below 10⁻⁴ after just one pass. This dramatic reduction in iteration count translates directly into computational savings.
Complexity analysis shows that an n‑th order RF requires O(n·K·M) operations (K = number of iterations, M = grid points). With n = 3 and K = 1, the 3rd‑RF is roughly five times faster than the 1st‑RF (n = 1, K = 5). Moreover, because the filter accesses only a small stencil, data exchange between processors in a parallel environment is reduced, improving scalability.
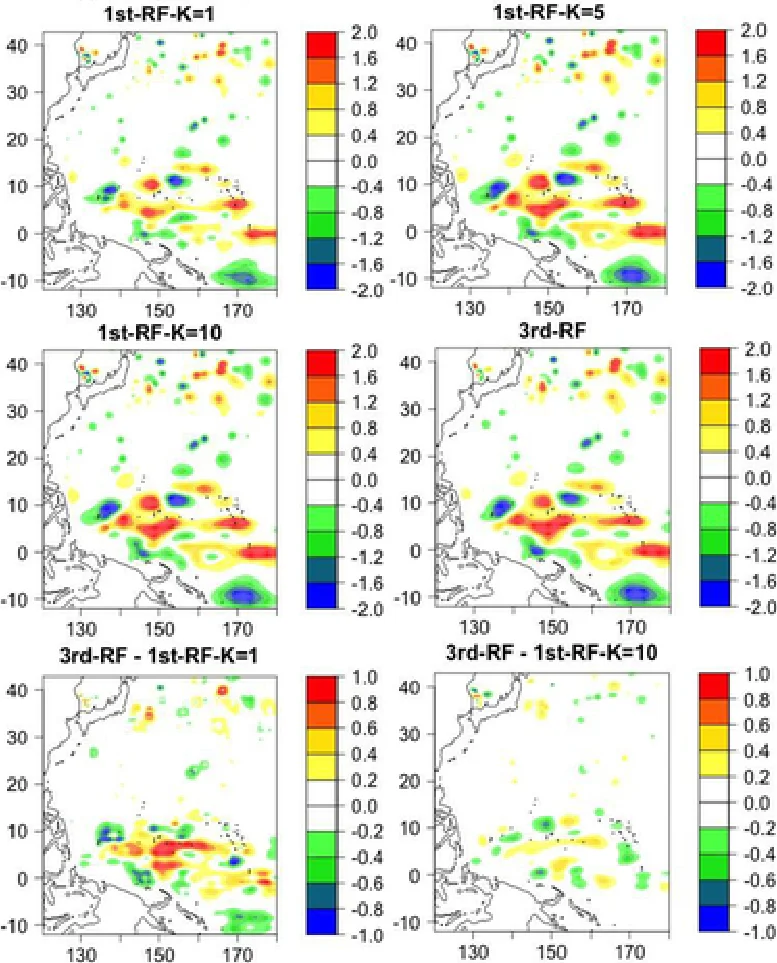
Two realistic oceanic applications are used to assess the impact. The first is a Mediterranean Sea configuration (Pinardi et al., 2010) and the second a global ocean configuration (Storto et al., 2011). Both experiments assimilate the same set of observations (satellite sea‑surface height, in‑situ temperature and salinity). Results indicate that the 3rd‑RF yields a lower analysis root‑mean‑square error (≈ 8 % reduction) and a significant decrease in total CPU time (≈ 30 % for the Mediterranean case, ≈ 25 % for the global case). The new filter also permits spatially varying correlation lengths, enabling more realistic, region‑specific error structures.
The authors conclude that the third‑order recursive filter provides a mathematically sound, highly accurate, and computationally efficient means of representing horizontal Gaussian covariances in variational ocean data assimilation. Its single‑iteration convergence, reduced inter‑processor communication, and flexibility in handling heterogeneous length scales make it especially suitable for operational, high‑resolution forecasting systems. Future work may extend the approach to anisotropic or non‑Gaussian error models and integrate it with non‑linear filtering techniques.
Comments & Academic Discussion
Loading comments...
Leave a Comment