Deterministic Symmetry Breaking in Ring Networks
We study a distributed coordination mechanism for uniform agents located on a circle. The agents perform their actions in synchronised rounds. At the beginning of each round an agent chooses the direction of its movement from clockwise, anticlockwise, or idle, and moves at unit speed during this round. Agents are not allowed to overpass, i.e., when an agent collides with another it instantly starts moving with the same speed in the opposite direction (without exchanging any information with the other agent). However, at the end of each round each agent has access to limited information regarding its trajectory of movement during this round. We assume that $n$ mobile agents are initially located on a circle unit circumference at arbitrary but distinct positions unknown to other agents. The agents are equipped with unique identifiers from a fixed range. The {\em location discovery} task to be performed by each agent is to determine the initial position of every other agent. Our main result states that, if the only available information about movement in a round is limited to %information about distance between the initial and the final position, then there is a superlinear lower bound on time needed to solve the location discovery problem. Interestingly, this result corresponds to a combinatorial symmetry breaking problem, which might be of independent interest. If, on the other hand, an agent has access to the distance to its first collision with another agent in a round, we design an asymptotically efficient and close to optimal solution for the location discovery problem.
💡 Research Summary
The paper studies a distributed coordination problem for a set of mobile agents (robots) placed on a unit‑circumference circle. Each agent has a unique identifier from a known range {1,…,N} and the total number of agents is n (n > 4). Time proceeds in synchronous rounds of length one. At the beginning of a round an agent chooses one of three actions: move clockwise (right), move counter‑clockwise (left), or stay idle (only in the “lazy” variant). Agents move at unit speed and are not allowed to overtake one another; when two agents meet they instantly reverse direction, and an idle agent that is hit starts moving in the direction of the colliding agent. No marks may be left on the ring, there is no direct communication, and each agent has only limited self‑sensing information about its own trajectory during the round.
Three variants of the model are defined:
- Basic – idle is forbidden; an agent must start moving either right or left.
- Lazy – idle is allowed in addition to the two directions.
- Perceptive (1‑perceptive) – the basic model plus an extra sensor that reports, at the end of the round, the distance from the start of the round to the first collision (coll()).
The only information that is always available is dist(), the clockwise distance (according to the agent’s own sense of direction) between the start and the end of the round.
The main computational task is Location Discovery (LD): after a finite number of rounds every agent must know the initial positions of all other agents relative to its own initial position. To achieve LD the paper first investigates three auxiliary coordination problems:
- Direction Agreement – all agents must agree on a common notion of clockwise.
- Leader Election – exactly one agent becomes the leader.
- Non‑trivial Move – the round’s rotation index (the net clockwise shift of all agents) must be different from 0 and n/2.
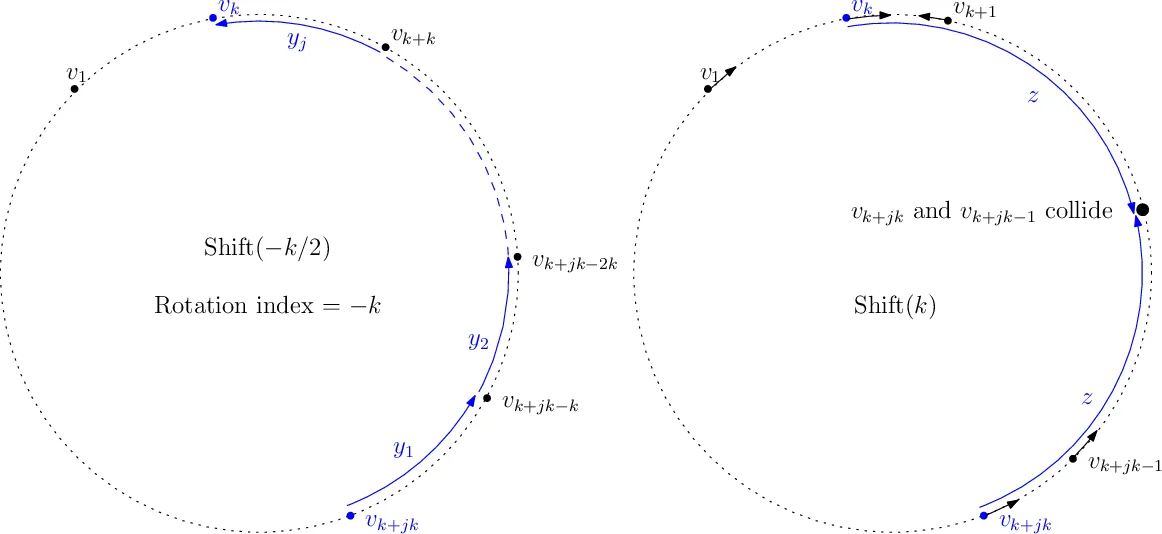
A key observation (Lemma 1, from prior work) is that in any round where nC agents start moving clockwise and nA agents start moving counter‑clockwise, every agent’s position is shifted by the same rotation index r = (nC − nA) mod n. Consequently, a round followed by its reversed version brings every agent back to its original location.
The authors prove that, in the basic and lazy models, the amount of information (only dist()) is insufficient to break symmetry efficiently when n is even and the agents do not share a common sense of direction. They formalize the symmetry‑breaking requirement via a purely combinatorial object called a distinguisher. A distinguisher is a sequence of subsets S₁,…,S_k ⊆
Comments & Academic Discussion
Loading comments...
Leave a Comment