On-line Decentralized Charging of Plug-In Electric Vehicles in Power Systems
The concept of plug-in electric vehicles (PEV) are gaining increasing popularity in recent years, due to the growing societal awareness of reducing greenhouse gas (GHG) emissions, and gaining independence on foreign oil or petroleum. Large-scale depl…
Authors: Qiao Li, Tao Cui, Rohit Negi
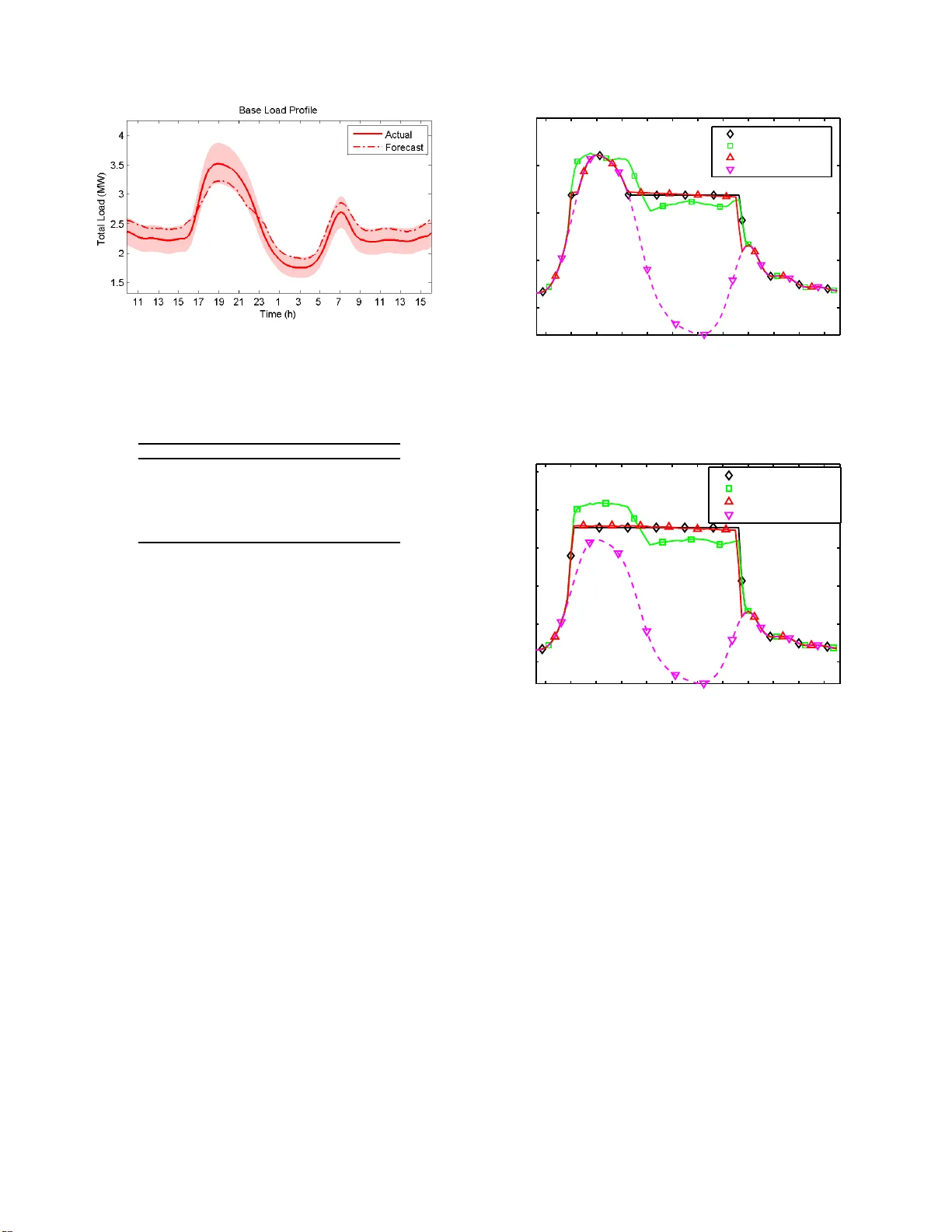
1 On-line Decentra lized Char ging of Plug-In Ele ctric V ehicles in Po wer Systems Qiao Li, Student Member , IEEE, T ao Cui, Stude n t Member , IEEE, Rohit N egi, Member , IEEE, Franz F ranchetti, Membe r , IEEE, a nd Marija D. Ili ´ c, F ellow , IEEE Abstract —The concept of plu g-in electric vehicles (PEV) are gaining increasing popularity in recent years, d ue to the gro wing societal awareness of reducing greenhouse gas (GHG) emissions, and gaining i n dependence on fo reign oil or petroleum. Large- scale deployment of PEVs currently faces many challenges. One particular concer n is that the PEV char ging can potentially cause significant impacts on the existing p ower distribution system, due to the increase in peak load. As such, this work tries to mitigate the impacts of PE V charging by proposing a decentralized smart PEV ch arging algorithm to minimize th e distribution system l oad variance, so that a ‘flat’ total load profile can be obtained . The charging algorithm is my opic, in th at it contr ols the PEV char ging processes in each time slot based entirely on the cu rrent power system states, with out knowledge ab ou t fu ture system d ynamics. W e provide theoretical guarantees on the asymptotic optimality of the propose d charging algorithm. Thus, compared to other fo recas t b ased smart charging approaches in th e literature, the charging algorithm not only achiev es optimality asymptotically in an on-line, and decentralized manner , but also is robust against various u ncertainties in the power system, su ch as random PEV driving patterns and di st ri buted generation (DG) with highly intermittent renewable energy sources. Index T erms —Distribution systems, smart charging, on-line algorithm, plu g-in electric v ehicle, minimum load variance, smart grids. N O M E N C L AT U R E A i ( n ) Energy consum ption of PEV i at time slot n . A max i Maximum en ergy co nsumption of PEV i dur- ing a time slot. C i Charging referen ce offset for PE V i . f ( d ) Daily average charging co st for day d . f max Maximum chargin g co st in a time slo t. N Number of customer s in the system. P i ( n ) Charging power of PEV i at time slot n . P max i Maximum chargin g p ower of PEV i . S net ( n ) T otal n et base load observed by the substation at time slo t n , wh ich may includ e the output of d istributed gen erators as negative load . S max net Maximum total net base load in a time slot. ∆ t Length o f a tim e slot. T Number of time slots for one day . U i ( n ) Energy queue leng th of PEV i at time slot n . U ref ( n ) PEV charging refe rence signal set by the ag- gregator at time slot n . β W eight o f the c harging co st. η i Charging efficiency of PEV i . All authors are with the Department of Electric al and Computer Engineer - ing, Carne gie Mellon Univ ersit y , P ittsb urg h, P A, 15213 USA (email: { qiaol, tcui, negi, franzf, milic } @ece .cmu.edu). µ ( d ) Daily average of the total net load fo r day d . χ i ( n ) I ndicator fu nction of whether PEV i is av a il- able f or charging at time slot n . I . I N T RO D U C T I O N T HE growing societal awareness of environmental issues, as well as ongoin g concern s about red ucing the depen- dence on foreign oil or petro leum, have mad e the co ncept of plug -in electric veh icles (PEV) very p opular during the past few y ears [1]. PEVs, such as electric vehicles (EV) and plug-in hyb rid elec tric vehicles (PHEV) , can contribute to resolving these ene rgy security issues b y r educing the gr een- house gas (GHG) e missions and p etroleum consumptio n in the transportatio n sector . Cur rently , large-scale imp lementation of PEVs in the n ear future is being plan ned. For examp le, the present US administration has p lanned 1 millio n PHEVs b y 2015. Realizing the critical role of PEV in the auto indu stry , many automakers, such as T oyota, Nissan, GM, BYD, Fisker and T esla are plan ning to prod uce do zens of types o f PEVs [1], with many co ming out starting by 2012 . It has been widely re cognized that high penetration le vel of PEVs will cau se significan t impacts o n the existing power system, in particular at the distribution le vel [2], [3], [ 4], [5], [6], [7], [8], [9]. W itho ut prope r coordina tion, it will be very likely th at m ost of these PEVs will start ch arging during th e overall peak load per iod [2], causing sev ere br anch congestion s and voltage p roblems. Some studies [6], [8] h av e shown that the existing distribution system infrastru cture ma y only su pport a very low PEV penetration level (such as 1 0% ) without gr id op eration proced ure cha nges o r additional g rid infrastructu re in vestments. On the other hand, studies ha ve also shown the promising result of mitig ating the impact of PEV charging by c o or dinated char ging , which can effecti vely shifts the PEV load to the off-peak p eriod. For examp le, it has been shown that coo rdinated charging can achieve around 50% PEV penetration level in certain existing distribution systems [8 ]. Thus, it is crucial to design effecti ve coordin ated PEV charging algorithm s for large-scale d eployment of PEVs in the cu rrent power system, in order to achieve efficient grid ope ration, as well as bypassing o r def erring the c ostly gr id infr astructure in vestment. In oth er words, the existing ‘cyber’ infrastructur e may be used to resume the ‘physical’ infrastru cture in the power cyber-physical sy stem (CPS). This work co ntributes to the integration of the PEV into the power sy stem by pro posing a n on-line smart cha rging algorithm . The a lgorithm tries to minimize the distribution 2 system load variance . The reason th at su ch an objectiv e function is ch osen is as follows. Firstly , the minimum load variance objective function can ach iev e a perfect ‘valley- filling’ chargin g pro file, in th e sense tha t at the optimal solu- tion, the total lo ad pro file is as flat as it can p ossibly be [10], [11]. This implies that the PEV charging load can be ef ficiently ‘spread’ amon g the o ff-peak periods, wh ich m ay help achieve a higher PEV integration lev el in the existing power system, as well as lowering the distribution system loss [1 2], as compared to the o ther smart ch arging algorithms, in par ticular th e on es based o n electricity price [6], [13]. In the latter case, it is possible that a new ‘PEV charging peak’ can form durin g the midn ight, as many PEVs start charging simu ltaneously , a s triggered by low electricity price. Seco ndly , the m inimum load variance formu lation is conve x, and ther efore can b e solved exactly and q uickly . Lastly , th e prop osed objective function is very flexible, which can also b e u sed for other applicatio ns, such as unidirectional vehicle-to-grid (V2G) ancillary services. This can be don e b y ‘mod ulating’ the base load according to external regulation sig nals. The details will be discussed later in this paper . As th e main contribution of this work, this p aper pro poses an on-line decen tralized algor ithm to solve the minimum load variance PEV ch arging prob lem. Th e charging alg orithm is ea sy to implemen t. In each time slot, ‘b inary’ charging decisions (charge or not charge) ar e made locally by each vehicle after compar ing its battery’ s state of cha rge (SoC), which is the a vailable percentage of the battery capac ity , to a charging ref erence signal set by an aggregator, which is owned by the utility . The charging r eference is carefully chosen, based entirely on the c urr e n t states of the power system, such as the SoC values of the plugg ed-in PEVs, the output of distributed ge neration (DG), the household b ase loads, as well as external regulation signals. In particular, th e charging reference signal is chosen to greedily optimiz es a function of the cur rent system state, maximizing a battery ‘energy queue’ weighted charging power , penalized by a quadra tic functio n of total load in each time slot. Somewhat surprisingly , we will show that such a myop ic chargin g alg o- rithm achieves the same asymp totic performance as compared to any optimal schedu ling algorithm with perfect one- day ahead for eca st of all unc ertain parameters . In other words, our algorithm achiev es the same optimality as compared to conv entional approac hes, such as dyn amic pro grammin g [1 4], while dramatically reducing the computa tional co mplexity . I n fact, th e propo sed charging algorithm is closely related to the celebrated optimal ma x -weight po licy in the stoc hastic control literature [15], [ 16]. Such ma x-weight type a lgorithms are intimately related to the stoch astic sub -gradien t algo rithm [16] an d dynam ic prog ramming [15], a nd h as f ound n umerou s successes in diverse areas such as compu ter networks [17], wireless networks [18], [19] and power transmission system [15]. In this pa per , we extend the application of the m ax- weight algor ithm to the PEV ch arging p roblem in th e power distribution system, and prove the optimality results. The smart PEV charging is an emerging a rea of resear ch, which has been subject to con tinuing investigations. While there ar e many algorithms ad dressing smart PEV ch arging, most o f them are solved in a centralized manner [4], [6 ], [12], [20], [21], assuming sufficient accuracy on day -ahead prediction s abo ut the stochastic dynamics in the power system. The real-tim e, d ecentralized charging issues are add ressed by very few w orks, such as [22], [23], wher e it is very challenging to obtain p erforma nce guarantees. No te that the f orecast b ased algorithm s are vulnerab le to the prediction errors. In particular , they may face significant p erform ance degradation as the current distribution system gradually ev olves into the futu re smart distribution system [ 24], where large- scale integratio n of distributed gen eration with in termittent r enew able sour ces can r esult in highly un certain stocha stic dyna mics, wh ich ar e hard to predict from o ne day ahead. On the other hand, the propo sed PEV charging algorith m in this paper d oes not suffer from such perfo rmance loss, as the PEV charging decision s are de termined completely in real time, where p ower system states can be o bserved with very good accu racy . Thus, the propo sed PEV cha rging alg orithm can achieve both op timality and r obustness in an o n-line, decentr alized man ner . The rest of this paper is organized as follows. I n Sectio n II, we introdu ce the model and formulate the optimal PEV charing problem. S ection III pro poses and analyzes the optimal PEV charging alg orithm, and Section IV de monstrates the simulation results. Finally , Section V con cludes this pap er . I I . A S S U M P T I O N S A N D M O D E L I N G In this section, w e intro duce the system model an d form u- late the m inimum load variance PEV charging p roblem. A. Battery Sta te Model A discrete-time system is consider ed in this paper, where the leng th of each time slot matches the typic al sampling an d operation time scale of the PEV aggregation unit. For example, the sampling rate of the d istribution system loa d can b e on a 1 5-min time b asis [4]. T he PEV aggregator is assume d to be owned by a utility com pany , which is concer ned abo ut potential gr id problems with PEV charging. Thus, the g oal of the PEV agg regator is to achieve on-line, decen tralized coordin ation o f PEV charging , so as to minimize its im pact on the d istribution system. Denote T a s th e total nu mber of time slots f or e ach d ay . W e assume th at th ere ar e N customers in the p ower system, a nd denote S net ( n ) as th e to tal n et b ase load as observed b y the aggregator du ring time slot n , which m ay include the o utput power fro m distributed g eneration as ne gative loads : S net ( n ) = S base ( n ) − S DG ( n ) (1) where S base and S DG are the total base load and total distrib uted generation , respectively . Denote U i ( n ) as the ‘en ergy queu e length’ at PEV i at the beginning of time slot n , which is the amount o f en ergy th at ne eds to be charged to r efill the battery of PEV i . That is, U i ( n ) = (1 − S oC i ( n )) × C a p i (2) where S oC i and C ap i are the state of charge an d capac ity o f PEV i ’ s battery , respectively . Thus, the queueing dyn amics of 3 the U i ( n ) can be expressed as the fo llowing: U i ( n ) = U i ( n − 1) − η i P i ( n )∆ t + A i ( n ) (3) In above, P i ( n ) is the charging p ower of PEV i durin g time slot n , ∆ t is the slot length, and η i is the battery c harging efficiency o f the PEV i , which depen ds on the PEV charger and batter y types. It is assume d that 0 ≤ P i ( n ) ≤ P max i , 1 ≤ i ≤ N (4) where P max i depend s on the charging circu it ra ting fo r PEV i . For example, fo r the standard 120- V/16-A wall outlet, the maximum charging power is 1.92kW . One technical iss ue is tha t the ‘en ergy queu e length’ cann ot b e negative, wh ich implies tha t η i P i ( n )∆ t ≤ U i ( n − 1) , 1 ≤ i ≤ N (5) This simply specifies that a ba ttery will not further charge once it is f ull. A i ( n ) is the rand o m en ergy consu mption of the PEV during time slot n . Bidirectional V2G applications are not co nsidered in this pap er , an d will b e addr essed in futur e research. In this paper, the ene rgy consum ption A i ( n ) can be only caused by th e rand om PEV driving activity [9] a t time slot n , during which the vehicle is not able to draw po wer from the distribution system. Such ch arging availability is fo rmally described by χ i ( n ) , which is an ind icator fun ction of wh ether PEV i is plug ged in to the power grid at time slot n , i.e., χ i ( n ) = 1 if PEV i is plu gged in to th e power grid at time slot n , otherwise χ i ( n ) = 0 . Thus, we have P i ( n ) = 0 if χ i ( n ) = 0 , since the PEV can not draw any power fr om the grid whe n it is not plug ged into the power g rid. B. Minimum Loa d V arian ce P E V Char ging This paper focu ses on coo rdinated PEV charging to mini- mize the total load variance as seen by the PEV aggregato r . The optimal co ordinated PEV charging problem ca n b e fo r- mulated as follows: min { P i ( n ) } f = 1 T T X n =1 ( S net ( n ) − µ + N X i =1 P i ( n )) 2 (6) s.t. ( 3 ) , ( 4 ) , ( 5 ) (7) P i ( n ) = 0 if χ i ( n ) = 0 , ∀ i, n (8) U i ( T ) = U i (0) , 1 ≤ i ≤ N (9) In above, the cost f unction f in (6) c orrespon ds to th e total load variance as seen by the PEV agg regator, where µ = 1 T T X n =1 ( S net ( n ) + N X i =1 A i ( n ) η i ∆ t ) (10) is the average total load during one day . Th e constraint in (9) essentially requires that all PEV en ergy consu mptions during th e day sho uld be met by the PEV chargin g schedu les { P i ( n ) } . Note that our form ulation has the same objective function as the m inimum lo ad variance form ulation in [12], with more d etailed mo deling of the battery states and PEV driving processes as in ( 3) and (8). Further, no te that both sequences of the n et ba se load { S net ( n ) } a nd the PEV driving variables { χ i ( n ) } , { A i ( n ) } are stochastic p r ocesses . In the literature, such ran domness is treated either as deter ministic [13], or by stochastic programm ing methods [4], which require the knowledge of the joint probab ility distribution of correlated random variables. One obstacle in achieving completely myopic, real-time PEV charging is that the minimum load variance in (6)-(9) requires kn owledge o f the av erage lo ad µ , which is a fu nction of PE V loads durin g the whole day . On the o ther han d, such av erage lo ad in formatio n is not needed to solve (6)-(9), as we show in the fo llowing theorem : Theor em 1: Consider the following optimization p roblem: min { P i ( n ) } ˜ f = 1 T T X n =1 ( S net ( n ) + N X i =1 P i ( n )) 2 (11) s.t. ( 7 ) , ( 8 ) , ( 9 ) Any optimal solution of (11) is also optimal f or (6)-(9). Pr oo f: See Ap pendix A. Thus, in ord er to solve the origin al m inimum variance PEV charging p roblem, it is sufficient to solve (1 1) instead, which does not inclu de the average lo ad µ , and ther efore allows ea sy implementatio n of myopic algo rithms. Th rough out o f the rest of the paper, we will directly fo cus on solving (11), bearin g in mind that the original problem (6)-(9) is also solved, according to Theor em 1 . In th e literatur e, most smar t charging algorithm s [4], [6] , [10], [ 12] solve the optimizatio n proble m (11) directly , as- suming tha t all th e ran dom variables { S net ( n ) } , { A i ( n ) } and { χ i ( n ) } (o r their join t proba bility distribution) are known. Thus, th e p erform ance o f these algo rithms dep ends crucially on the p rediction acc uracy of these parameters, requiring knowledge of automotive driving p atterns and base load s. While th e f ormer is clear ly unrealistic, even loads may be unpred ictable, if the system has a large numb er of small- scale d istributed generator s, wh ich can u se hig hly intermittent renewable energy sources, such as wind an d solar . Prediction errors can cause sub stantial perfor mance loss in these charging algorithm s. As an alternativ e approach , in this paper, we propo se a myo pic PEV charging algorithm to solve (11), which can ach ie ve the op timal charging co st asymp totically , w ithout suffering from day-ah ead pr ediction error s. I I I . D E C E N T R A L I Z E D S M A RT P E V C H A R G I N G In this section, we de scribe and analyz e th e p erforman ce o f the on-lin e decentra lized PEV charging alg orithm. A. Decentralized PEV Char ging The algorith m is shown in Algor ithm 1. Acco rding to the algorithm , the charging decisions are made by e ach vehicle locally by comparin g its battery ‘en ergy qu eue length ’ ( or equiv alently , its SoC) to a charging referen ce set by the aggregator . Fig. 1 illustrates such local chargin g process at a PEV in the power system. In this way , the PEV charging processes are pr operly coo rdinated, so that th e PEVs with higher ‘charging pre ssure’ U i ( n − 1) (equ iv alen tly , lower SoC) can be ser ved first. Furth er , com pared to the ce ntralized 4 Algorithm 1 On-line Decentralized PEV Charging 1: Initialization: At the beginn ing o f each time slot, the controller of each plugge d-in PEV in itializes its charging power P i ← 0 , and th e ag gregator in itializes the global charging r eference as follows: U ref ← ( U min ref + U max ref ) / 2 (12) where U min ref and U max ref are lo wer and u pper bounds, respectively , which are selected based on h istorical data. 2: Each vehicle controller up dates its chargin g power: P i ← 0 U i ( n − 1) ≤ U ref / ( η i ∆ t ) − C i P max i otherwise (13) where C i is a pr operly cho sen c onstant dep ending o n th e charging ser vice contr act of PEV i . 3: Each vehicle co ntroller submits the in tended charging power P i to the aggregator, which sets U max ref ← U ref if U ref > 2 β ( S net ( n ) + N X i =1 P i ) (14) Otherwise, it sets U min ref ← U ref . β is a proper ly chosen constant to achieve a tra de-off b etween refilling the bat- teries qu ickly and min imizing the ch arging co st. 4: The c harging r eference U ref is broadcast to e ach vehicle controller . If | U min ref − U max ref | < ε ′ , stop. Otherwise go to Step 2. charging sch eduling app roaches, th e algor ithm is also less intrusive , since the PEVs ar e the decision m akers, and are only requ ired to submit their charging p ower { P i } to the aggregator . Note that neith er the charging decisions in (13) nor the charging refer ence U ref update is done in an ad hoc fashion. In fact, we will show th e iterative p rocedur es in Alg orithm 1 solve a gen eralized ‘max-w eight’ o ptimization p roblem. Theor em 2: In each time slot n , the charging p ower { P i ( n ) } com puted by Algor ithm 1 solves the fo llowing opti- mization pr oblem: max { P i } N X i =1 ( U i ( n − 1) + C i ) η i P i ∆ t − β ( S net ( n ) + N X i =1 P i ) 2 s.t. 0 ≤ P i ≤ P max i , 1 ≤ i ≤ N P i η i ∆ t ≤ U i ( n − 1) , 1 ≤ i ≤ N P i = 0 if χ i ( n ) = 0 , 1 ≤ i ≤ N (15) For the case that the b attery o f PEV i is fu lly charged in the middle o f a time slot, P i ( n ) is interpreted as the ‘average charging power’ P i ( n ) = U i ( n − 1) / ( η i ∆ t ) for th at particular time slot. Pr oo f: See Ap pendix B. W e will continu e with the above analysis in Section III- C and pre sent perfor mance g uarantees of A lgorithm 1. Before that, we will discuss th e intuition behind th e algo rithm, and its key proper ties. 21 23 1 3 0 1 2 3 4 5 6 7 8 9 Time (h) Energy (kWh) Charging Process at Vehicle 1 Quene Length Threshold Charging Power (kW) Fig. 1. Illustration of the decentrali zed charging profile of a typical PE V . B. Discussions on the Cha r g ing Algorithm 1) Intuition beh in d the Algorithm : Note that at the co n- vergence, the charging referen ce can b e written as U ref = 2 β ( S net ( n ) + P N i =1 P i ) . Thus, intuitiv ely , during the peak period, the agg regator will set a hig h charging referen ce U ref , so that the PEVs with lo w battery ‘ energy queue length’ (correspo ndingly , high SoC) will not charge. Similarly , fo r the off-peak period, the aggregator will set a low charging referenc e U ref , so that th e PEVs will ‘fill th e valley’. Such an approa ch can b e easily u sed to absorb ge nerations with high ly intermittent renewable sources, by treating the m as negative loads in S net ( n ) . No te th at it is also possible to ‘ modulate’ the net b ase lo ad S net ( n ) ac cording to cer tain externa l regulation signals, in ord er to achieve V2G ancillary services. Detailed discussions on the specific metho ds, on the o ther ha nd, is ou t of the scope of this pap er . 2) Generalized Max-W eight P olicy: Anth er way to interp ret the algo rithm is to inspect the optimiz ation in (1 5). Note that the o bjectiv e function in (15) has two p arts: the ‘energy queue length weighted ch arging’ term ( U i ( n − 1) + C i ) η i P i ∆ t , and the ‘ch arging cost’ term ( S net ( n ) + P N i =1 P i ) 2 , which is weighted by parameter β . The first term is related to the ‘stability’ re quiremen t of th e energy queues { U i ( n ) } , w hich encour ages th e PEVs to charge at high power , in particular the ones with low SoC. On the o ther han d, the PEV charging is also pena lized by the seco nd q uadratic term, which is the instantaneou s chargin g co st at time slot n , so as to prevent grid pro blems due to agg ressi ve PEV charging. Finally , by adjusting the p arameter β , one can ach iev e a trade-off between quickly charging the PEV batteries (maxim izing the first term), and a chieving minimum charging co st (m inimizing th e secon d term). T he ef fect of β will be illustrated in case studies. Note that β n eeds to be chosen b y th e ag gregator c arefully , accordin g to system specifica tions and historical data. 3) On-Off Charging: Algorithm 1 has an interesting ‘on - off ’ charging pr operty . That is, each PEV either charges at the max imum power , o r do not charge at all. This can be seen from th e algorithm specification in (13), as well as in Fig. 1. 5 Fig. 2. The communication structure of the decent raliz ed PEV charging algorit hm. Thus, compared to t he smart charging algorith ms, which adjust charging p owers c ontinuo usly , the on -line d ecentralized PEV charging simplifies PEV ch arging circu it design . Sim ilar typ e ‘on-o ff ’ charging profiles ar e also considere d in [25]. 4) Commun ication S tructur e: Th e communication structure for the algor ithm is shown in Fig. 2. Accor ding to this structure, the vehicle contro llers directly com municate with the aggregator, perhap s throu gh extra in termediate le vels of aggregation [ 6]. There is no d irect communicatio n between the PEVs. Fu rther, the ag gregator only need s a scalar, namely the aggr egated PEV load P N i =1 P i , and broa dcast b ack the charging refere nce U ref to the PEV s. Ther efore, the pro posed scheme req uires low communication capability , and is easy for real-time imp lementation. C. P erformance Gua rantees This section contin ues with the analysis of Theor em 2 and dem onstrates the asymptotic o ptimality of the proposed PEV charging algorithm , by co mparing it against the op timal solution of (11) over a lon g time per iod. As a m inor technica l assumption, we assume that th e PE V en ergy consump tions { A i ( n ) } are strictly feasible , in the sense that there is a charging sch edule, which satisfies (4), (8), an d th at T X n =1 P i ( n ) η i ∆ t ≥ T X n =1 A i ( n ) + εT , 1 ≤ i ≤ N (16) for a small constant ε > 0 . This simply means that the duration that a PEV is plugged into the distribution system is ‘more than just enou gh’ to refill its daily energy consu mption. W e are interested in the performance of the algo rithm over a period of D day s, an d den ote ˜ f ⋆ ( d ) as the optimal co st of (11) fo r the d -th day . W e have th e following th eorem: Theor em 3: Algo rithm 1 achieves the fo llowing asympto tic av erage charging cost: lim sup D →∞ 1 D T DT X n =1 ( N X i =1 P i ( n ) + S net ( n )) 2 ≤ lim sup D →∞ 1 D D X d =1 ˜ f ⋆ ( d ) + B 1 β + B 3 ( T + 1) 2 β (17) and the f ollowing average en ergy q ueue lengths: lim sup D →∞ 1 D T DT X n =1 N X i =1 U i ( n ) ≤ ( B 2 + B 3 )( T + 1 ) 2 ε B 1 ε + β ˜ f max ε − N X i =1 C i (18) where the constants are defined as follo ws: ˜ f max = ( S max net + P N i =1 P max i ) 2 , B 1 = P N i =1 ( C i + K i ) K i , B 2 = P N n =1 εK i , B 3 = P N n =1 K 2 i , and the co nstant K i = max( A max i , η i P max i ∆ t ) . Pr oo f: See Ap pendix C. From th e above theorem, it is clear tha t, by proper ly adjusting the parameter β , the long term average chargin g cost can be made arbitrarily close to the optim al, w ith an optimality g ap o n an o rder of O (1 /β ) , as shown in (17), while the av erage queu e leng ths grow as O ( β ) , as sh own in (18). The asymptotic boun d p rovided b y the above analysis is not tight in general. On the oth er hand, it is po ssible to provide tighter gu arantees, b y assumin g specific p robabilistic distributions on th e stochastic p rocesses, such as PEV dr i ving patterns, base load , and renewable generatio n. Su ch a mod el depend ent analy sis is o ut of the scope of th is paper, and will be addr essed in futur e research. While this section showed th e theor etical optimality of the decentralized PEV charging algorithm , in the next section, we d emonstrate its perfo rmance in simulation to illustrate this point. I V . C A S E S T U DY In th is section, we test the perf ormance of th e pro posed algorithm , and com pare it against oth er pre diction based algorithm s. The simulations are done on IEEE 37-bus system and IE EE 1 23-bus system [26], with MA T LAB on a Xeo n X3460 CPU with 8GB of RAM. A. Simula tio n S etup 1) Base Loa d: The test systems are assume d to b e residen - tial distribution systems. Both system s use the same househo ld base load curve, which is chosen accor ding to the typical southern California residential load from the SCE website [27], with proper scalin g to match th e n ational average ho usehold load o f 1 .3kW [2 8]. Fig. 3 shows the daily curve of total base load used for the simulation with the IEEE 37-bus system. The I EEE 12 3-bus system uses a p roperly scaled curve with the same sh ape. For d ay-ahead prediction b ased PEV cha rging algorithm s, we assume th at they use forec ast profiles such as the one in Fig. 3. Note that the shade d region co rrespon ds to the 10% mean a verage p ercentage error bou nds, so that the errors of the f orecast cur ve in Fig. 3 are within 10 % of the actual lo ad. For simplicity of compar ison, we do n ot explicitly model DG in this simulation . But we want to e mphasize that the prediction er ror will g row larger as the DG penetration lev el increases. Finally , the nu mber of househ olds co nnected to each bus will depend o n the test fe eder spe cification for each simulation scenario. 6 Fig. 3. Base load profile used in the simulation with IEEE 37 bus system. T ABLE I V E H I C L E F A C T S Parame ter V a lue Batte ry Capaci ty 16 kWh Energy Usage per 100 miles 34 kWh Char ging Rate (120 V , 16 A) 1.92 kW A verag e Daily Commute Distance 25 miles Daily Consumption 8.75 kWh Char ging Efficie ncy 0.90 2) PEV Specifi c ations: The PEV specificatio ns and d riving patterns are summarize d in T able I, which are ob tained from typical PEV specifica tions [29] and the national tran sportation survey [30]. Th e daily consump tion of 8. 75kWh in T able I is obtained from the 2 5 m iles a verage daily commute distance and the PEV consum ption rate o f 34 kWh/100 miles. The av erage n umber of r egistered veh icle is assumed to be 1. 8 per househo ld [30]. In the simulation, The PEVs will b e ran domly assigned a mong all vehicles, accor ding to the PEV p enetration lev el. Th e ran dom PE V dr i ving p attern in th is simu lation is based on the national tra nsportation survey [30]. A PEV is assumed to leav e home at 7am, with zero-m ean Guassian of fset with standard d eviation of 1 hou r . Similar ly , a PEV arrives home at 5pm, with zero- mean Gaussian offset with stand ard deviation of 2 hours. W e focu s on residential charging in this simulation, and assume that the PEV can only charge at h ome after it c onnects to the gr id on retu rning home. B. IEEE 37-Bus System The PEV charging is first simulated in the standard IEEE 37-bus test f eeder . In this case, th e total nu mber of vehicles is 34 02. There are three types of sm art char ing algorith ms considered in the simu lation: 1 ) A static o ptimal c harging algorithm which solves (11), w ith perfect knowledge o f the day-ah ead values o f all rando mness; 2) A static suboptimal charging algorithm, which solves (11) using imp erfect for ecast of day-a head load curve; and 3) On -line ch arging pro posed b y Algorithm 1 in this paper . The ch arging algor ithms are simu lated at PEV p enetration lev els of 30 % an d 50%. For the 30% pe netration case, β = 15 17 19 21 23 1 3 5 7 9 11 13 2 2.5 3 3.5 4 Total Load (MW) 30% Penetration, IEEE 37 Bus Time (h) Static Optimal Static Suboptimal On−line Decentralized Base Load Fig. 4. The total s ystem loads with 30% PEV penetrati on in the IEEE 37-b us system. 15 17 19 21 23 1 3 5 7 9 11 13 2 2.5 3 3.5 4 4.5 Total Load (MW) 50% Penetration, IEEE 37 Bus Time (h) Static Optimal Static Suboptimal On−line Decentralized Base Load Fig. 5. The total s ystem loads with 50% PEV penetrati on in the IEEE 37-b us system. 0 . 0205 , an d C i = 57 7 for eac h vehicle, whereas for the 50% penetration c ase, β = 0 . 01 61 , a nd C i = 53 4 for each vehicle. In bo th cases, conv ergence can b e ob served after aro und 20 iterations fo r each time slot com putation. The m aximum total computatio n time of the on-lin e algo rithm is 0.58 second for a 24-ho ur simulation scenario, while 39 00 second s f or the static optimization s. Note the d ramatic computation pe rforman ce improvement for the ca se of on- line ch arging. This is due to the fact that each c harging sch edule is compu ted using only curr ent system states , which have much smaller dim ension than the total state processes. In practice, the time scale of each time slot is on th e order of minutes. Thu s, the computatio n and commun ication r equiremen t of the on-line charging algo rithm can be easily satisfied. The results of total loads are shown in Fig. 4 and Fig. 5, respectively . W e h av e the following remark s. 1) V alley F illing: One can easily verify effectiv eness o f the minim um load variance form ulation (6) b y ob serving that, in both cases, the static optimal solution ach ie ves a perfectly flat total load cu rve at night. Thus, compar ed to other smart 7 15 17 19 21 23 1 2.5 3 3.5 4 Total Load (MW) Total Load, 30% Penetration, IEEE 37 Bus Prioritized Uniform 15 17 19 21 23 1 0 2 4 6 8 Energy (kWh) Battery States with Prioritized Charging Time (h) High Priority Low Priority Fig. 6. The total system load profile and typical battery state profile w ith 30% PEV penetrat ion in the IEEE 37-bus system with prioriti zed customers. Note that all customers in the ‘uniform’ case hav e the same C i = 577 . charging formu lations, the ones based o n electricity price in particular, the min imum load variance fo rmulation can av oid the addition al ‘mid night p eak’, which, in the extreme case, may cause similar grid c ongestion issues as uncoor dinated charging. 2) Optimality: The propo sed on- line d ecentralized PEV charging achiev es alm ost the same total lo ad profile as the static optimal, even though the former d oes not need to know the driving pattern a nd loa ds in adva nce . This furth er verifies the theo retical result in 3. Thus, we can achieve the same perfo rmance as the static op timal, with mu ch smaller computatio nal overhead. 3) Robustness: Th e day- ahead p rediction based a lgorithms are vulner able to the forecast erro rs. This can be clearly observed from Fig. 4 and Fig. 5, wh ere the for ecast based solutions can not achieve a flat profile in the presence of the load for ecast er ror . In fact, we allowed these algorith ms to know the exact driving patterns in advance, whic h is clearly unrealistic. On the other han d, the optima l decentralized charg- ing algor ithm is n ot affected by such fo recast errors, since it is an on-line algo rithm, which d oes not rely on for ecasts. 4) Service Differ en tiation: The con stants { C i } are used to provide service differentiation among the PEVs, where a larger C i implies a highe r priority fo r PEV i . T hat is, for two PEVs i and j with the same So C, if C i > C j , PEV i can start ch arging sooner than PEV j , a ccording to ( 13). In o rder to demonstra te this effect, we simulate th e 30% penetration case with two classes o f customers, wh ere 10% cu stomers have high prio rity , with C i = 8 77 , and 90% customers have low pr iority , with C i = 577 . Th e total loads and b attery states are shown in Fig . 6. One can clearly see th at the en ergy que ues of both classes are ‘stable’. Fu rther, the h igh p riority customers can fin ish charging m uch earlier than the cu stomers with low priorities. Note that the values of { C i } hav e to be chosen carefully by the utility based on system specification and custom ers’ choice, which is o ut o f the scope of th is paper . 17 19 21 23 1 3 5 7 1.8 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 Total Load (MW) 30% Penetration, IEEE 37 Bus Time(h) β =0.0205 β =0.0041 β =0.1025 Base Load Fig. 7. Sensiti vity results of the total load with respect to changes in β in the IE EE 37-bus system. 5) Effects o f β : Th e p arameter β specifies th e trade-o ff between charging the PEV batteries, and achieving a small charging cost. T o illustrate this, we simulate the 3 0% pene- tration case in Fig. 7 with β = 0 . 0 205 , 0 . 0 041 , and 0 . 102 5 , respectively . One can clearly observe that, when β is small, the PEV c harging is more greedy , as the weight of the charging cost is smaller . On the other h and, large β will fo rce the total load pro file to b e more flat, by penalizing the PEV charging power . I n p ractice, β has to be cho sen c arefully by the u tility , using system spe cification and historical data. C. IEEE 12 3-Bus System W e next simu late the PEV charging in IE EE 123 -bus test feeder, where th e total nu mber of vehicles is 48 32. In this case, on e cann ot implement th e static optimiz ations on the machines specified at the beginning of this section, d ue to the large proble m size ( around 4600 thou sand variables). On the othe r h and, th e on-lin e charging can still be implemen ted , as the ch arging d ecisions ar e made o nly using the curren t system states, wh ich have much lower dimension ( around 4 .8 thousand variables). The charging algorithms are simulated at PEV pen etration levels of 30% and 50 %. For the 30% case, β = 0 . 0 205 , C i = 81 5 , while fo r the 50% ca se, β = 0 . 161 , C i = 764 . In both simula tions, convergence can be reach ed after aroun d 20 iterations. The total comp utation time of the on -line algorithm is 0.7 5 second for a 2 4-hou r simulation scenar io. The results o f total loa ds are shown in Fig. 8 and Fig. 9 , resp ectiv ely . One can easily o bserve that, in both cases, the on-line alg orithm can ach ie ve a flat load profile. Thus, the on -line algo rithm n ot only achie ves th e optimal charging cost, b ut also is dramatically computatio nally efficient, and much easier f or im plementation in large-scale systems, comp ared to o ther ap proaches forecast and static optimization based appro aches. V . C O N C L U S I O N This pap er propo sed an o n-line decen tralized PEV charging algorithm to m inimize the distribution sy stem total lo ad vari- 8 15 17 19 21 23 1 3 5 7 9 11 13 2.5 3 3.5 4 4.5 5 Total Load (MW) 30% Penetration, IEEE 123 Bus Time(h) On−line Decentralized Base Load Fig. 8. The tota l system load under the on-line decentral ized algorit hm with 30% PEV penetra tion in the IE EE 123-bus system. 15 17 19 21 23 1 3 5 7 9 11 13 2.5 3 3.5 4 4.5 5 5.5 Total Load (MW) 50% Penetration, IEEE 123 Bus Time(h) On−line Decentralized Base Load Fig. 9. The tota l system load under the on-line decentral ized algorit hm with 50% PEV penetra tion in the IE EE 123-bus system. ance. The charging decision s are m ade locally at each PEV based en tirely on the power system states in each time slot. Since driving pattern and lo ad forecasts ar e no t n eeded in this algorithm , the chargin g perf ormance is robust again st various uncertainties in the system, as compared to the prediction based static optimization ap proaches in the literatur e. In the analysis, asymp totic results abou t the cost function an d battery lev el stability a re shown. Th e performan ce of the prop osed charging algorith m is furth er compar ed aga inst static smart charging a lgorithms by simu lation results. A P P E N D I X A P R O O F O F T H E O R E M 1 Pr oo f: It is obvious that any feasib le solution o f (11) is also feasible fo r (6)-(9). Now , it is sufficient to show th at the two o bjectiv e functio ns are d ifferent by at m ost a co nstant th at is indepen dent o f c hoice o f charging schedules { P i ( n ) } . Note that the constraint (9) implies that T X n =1 η i P i ( n )∆ t = T X n =1 A i ( n ) (19) This, togeth er with the d efinition of µ in (10) imply that µ = 1 T T X n =1 ( S net ( n ) + N X i =1 P i ( n )) ( 20) Therefo re, we have f = ˜ f − 2 µ T T X n =1 ( S net ( n ) + N X i =1 P i ( n )) + µ 2 (21) = ˜ f − µ 2 , (22) where, by ( 10), µ is ind ependen t of the choice of sched ules. Thus, the th eorem hold s. A P P E N D I X B P R O O F O F T H E O R E M 2 Pr oo f: W e can formulate the optimization in (15) as the following eq uiv alent problem : max { P i } ,y N X i =1 ( U i ( n − 1) + C i ) η i P i ∆ t − β y 2 (23) subject to y = N X i =1 P i + S net ( n ) (24) 0 ≤ P i ≤ P max i , 1 ≤ i ≤ N (25) P i η i ∆ t ≤ U i ( n − 1) , 1 ≤ i ≤ N (26) P i = 0 if χ i ( n ) = 0 , 1 ≤ i ≤ N (27) Thus, on e can easily write the dual pr oblem as min U ref max { P i ,y } N X i =1 ( U i ( n − 1) + C i ) η i P i ∆ t − β y 2 + U ref ( y − N X i =1 P i − S net ( n )) subject to ( 25 ) , ( 26 ) and ( 2 7 ) (28) It can b e easily shown that y ⋆ = U ref / 2 β . Th us, we can simplify (2 8) as min U ref max { P i } N X i =1 ( U i ( n − 1) + C i − U ref η i ∆ t ) η i P i ∆ t + ( U ref ) 2 4 β − U ref S net ( n ) subject to ( 25 ) , ( 26 ) an d ( 27 ) (29) One can immediately see that the d ecentralized chargin g in (13) corresponds to the inner optimization problem with charg- ing power constrain t (2 5), and the update on U ref in Step 3 of Algorithm 1 co rrespond s to standa rd b inary search algo rithm over the scalar U ref to solve the conve x dual p roblem. 9 A P P E N D I X C P R O O F O F T H E O R E M 3 In this section we prove Th eorem 3. Defin e a ‘L yap unov’ type fun ction F ( n ) as f ollows: F ( n ) = 1 2 N X i =1 ( U i ( n ) + C i ) 2 + β n X k =1 ( S net ( k ) + N X i =1 P i ( k )) 2 The key in provin g both cost optimality as well as stab ility results inv olves ana lyzing the d rift behavior of F ( n ) , which we will illustrate in the following. Note that similar te chniques have also been applied in [16] in th e co ntext of wireless networks. A. Cost Op timality The pro of of ( 17) requir es several tech nical lem mas. The following lem ma provided a b ound on the sing le slot drift of F ( n ) . Lemma 1: T he one-slot d rift of F ( n ) ca n be b ounde d as follows: ∆ 1 F (0) = F (1) − F (0) ≤ N X i =1 ( U i (0) + C i )( A i (1) − η i P i (1)∆ t ) + B 3 + β ( S net (1) + N X i =1 P i (1)) 2 (30) Pr oo f: For each PEV i , direct calculatio n shows that 1 2 ( U i (1) + C i ) 2 = 1 2 U i (0) + A i (1) − η i P i (1)∆ t + C i 2 = 1 2 ( U i (0) + C i ) 2 + ( U i (0) + C i )( A i (1) − η i P i (1)∆ t ) + 1 2 ( A i (1) − η i P i (1)∆ t ) 2 (31) Thus, the f ollowing bo und holds: 1 2 ( U i (1) + C i ) 2 − 1 2 ( U i (0) + C i ) 2 = ( U i (0) + C i )( A i (1) − η i P i (1)∆ t ) + 1 2 ( A i (1) − η i P i (1)∆ t ) 2 ≤ ( U i (0) + C i )( A i (1) − η i P i (1)∆ t ) + 1 2 K 2 i (32) where K i = max( A max i , η i P max i ∆ t ) . The last inequa lity holds because we assume th at a PEV ca n either charge (in garag e) or discharge (on the roa d) in each time slot, but no t both. Thus, the lem ma fo llows after summing up th e above ineq uality over N customers and add ing th e ch arging cost dr ift ter m β ( S net (1) + P N i =1 P i (1)) 2 . W e n ext gen eralize the above boun d to T time slots. Lemma 2: Un der Algo rithm 1, th e first T -slot d rift of F ( n ) can be boun ded as ∆ T F (0) ≤ B 1 T + B 3 T ( T + 1) 2 + β ˜ f ⋆ (1) T (33) Pr oo f: Carr ying o ut th e pr ocedure in Lemm a 1 over T time slots, we obtain the following ∆ T F (0) ≤ T X n =1 N X i =1 ( U i ( n − 1) + C i )( A i ( n ) − η i P i ( n )∆ t ) + B 3 T + β T X n =1 ( S net ( n ) + N X i =1 P i ( n )) 2 (34) Now , we w ant to co mpare the bo und on the RHS of (34) und er the myopic charging sch edule { P i ( n ) } , which ar e co mputed by Algorithm 1, against a static optimal solution of (11) with pe rfect knowledge of all stoc hastic dy namics, which we denote as { P stat i ( n ) } . Because Algorith m 1 alw ays greedily maximizes (15), the RHS of the above can be furthe r bo unded as follows: ∆ T F (0) ≤ T X n =1 N X i =1 ( U i ( n − 1) + C i )( A i ( n ) − η i P stat i ( n )∆ t ) ( B 1 + B 3 ) T + β T X n =1 ( S net ( n ) + N X i =1 P stat i ( n )) 2 (35) The extra term B 1 = P N i =1 ( C i + K i ) K i is introd uced to bound the case wh ere the en ergy queues are small, so th at the charging pro cess stops in the midd le of a time slot. In such a case, we h av e ( U i ( n − 1) + C i ) η i P stat i ( n )∆ t ≤ ( K i + C i ) K i (36) W e next bou nd the dr ift in the energy q ueue len gths. No te that the energy q ueue len gth for e ach PEV i can be written as the following: U i ( n ) = U i (0) + n X k =1 A i ( n ) − η i P i ( n )∆ t (37) Thus, U i ( n ) can be bo unded as follows: U i (0) − K i n ≤ U i ( n ) ≤ U i (0) + K i n (38) which yield s the fo llowing b ound: U i ( n − 1) A i ( n ) − η i P stat i ( n )∆ t ≤ U i (0) A i ( n ) − η i P stat i ( n )∆ t + K 2 i ( n − 1) (39 ) Plugging the a bove inequ ality in to the (35) yields ∆ T F (0) ≤ N X i =1 ( U i (0) + C i ) T X n =1 A i ( n ) − η i P stat i ( n )∆ t + B 1 T + B 3 T + B 3 T X n =1 ( n − 1) + β T X n =1 ( S net ( n ) + N X i =1 P stat i ( n )) 2 ( a ) = B 1 T + B 3 T ( T + 1 ) 2 + β ˜ f ⋆ (1) T (40) 10 where step ( a ) is because { P stat i ( n ) } so lves the op timization (11), and satisfies T X n =1 A i ( n ) − η i P stat i ( n )∆ t = 0 (41) 1 T T X n =1 ( S net ( n ) + N X i =1 P stat i ( n )) 2 = ˜ f ⋆ (1) (42) Thus, the le mma follows. W e next extend th e a bove analysis from on e d ay to D day s: Lemma 3: T he drift of F ( n ) over the first D T time slots satisfies ∆ DT F (0) ≤ B 1 D T + B 3 D T ( T + 1) 2 + β T D X d =1 ˜ f ⋆ ( d ) Pr oo f: Th is can be simply obtain ed by summing the bound in Lemma 2 over D days. W e ar e now r eady to p rove the first part of Theo rem 3. Pr oo f: (Cost Optimality of Algo rithm 1) Accord ing to th e bound in Lemm a 3, the av erage co st of the first D days un der Algorithm 1 can be bound ed as 1 D T DT X n =1 ( S net ( n ) + N X i =1 P i ( n )) 2 ≤ 1 β D T F ( DT ) = F (0) + ∆ DT F (0) β D T ≤ F (0) D T + B 1 β + B 3 T + 1 2 β + 1 D D X d =1 f ⋆ ( d ) (43) Thus, after taking D → ∞ , the cost optimality claim in (1 7) follows. B. Stab ility The proo f of the seco nd part of Theo rem 3 r equires anoth er set of lemmas bo unding the drift of F ( n ) . W e start with the first one the T -slot drift of the fu nction F ( n ) . Lemma 4: Un der Algo rithm 1, th e first T -slot d rift of F ( n ) can be boun ded as ∆ T F (0) ≤ − ε T X n =1 N X i =1 ( U i ( n ) + C i ) + B 1 T +( B 2 + B 3 ) T ( T + 1) 2 + β ˜ f max T (44 ) Pr oo f: Denote { P feas i ( n ) } as a sequen ce of strictly fea- sible c harging schedu les, which satisfy (1 6). Becau se the charging sched ules { P i ( n ) } by Algo rithm 1 always greed ily maximize (15), we can obtain a similar bou nd as (35) as follows: ∆ T F (0) ≤ T X n =1 N X i =1 ( U i ( n − 1) + C i )( A i ( n ) − η i P feas i ( n )∆ t ) + B 1 T + B 3 T + β T X n =1 ( S net ( n ) + N X i =1 P feas i ( n )) 2 ≤ T X n =1 N X i =1 ( U i ( n − 1) + C i )( A i ( n ) − η i P feas i ( n )∆ t ) + B 1 T + B 3 T + β ˜ f max T (45) From (3 8), the following bound ho lds: U i ( n − 1) A i ( n ) − η i P feas i ( n )∆ t ≤ U i (0) A i ( n ) − η i P feas i ( n )∆ t + K 2 i ( n − 1) (46) Plugging the a bove into ( 45) and applyin g (16) yields ∆ T F (0) ≤ N X i =1 ( U i (0) + C i ) T X n =1 ( A i ( n ) − η i P feas i ( n )∆ t ) + B 1 T + B 3 T ( T + 1) 2 + β ˜ f max T ≤ − εT N X i =1 ( U i (0) + C i ) + B 3 T ( T + 1 ) 2 + B 1 T + β ˜ f max T (47) Finally , from (38) the above can be furth er b ound ed as ∆ T F (0) ≤ − ε N X i =1 T X n =1 ( U i ( n ) − K i n + C i ) + B 1 T + B 3 T ( T + 1) 2 + β ˜ f max T = − ε N X i =1 T X n =1 ( U i ( n ) + C i ) + B 2 T ( T + 1) 2 + B 1 T + B 3 T ( T + 1) 2 + β ˜ f max T (48) from which th e lemm a follows. Similarly , th e drift of F ( n ) over D days can be boun ded by the f ollowing lemma . Lemma 5: T he drift of F ( n ) over the first D days can be bound ed as follows: ∆ DT F (0) ≤ − ε DT X n =1 N X i =1 ( U i ( n ) + C i ) + B 1 D T +( B 2 + B 3 ) D T ( T + 1) 2 + β D ˜ f max T (49 ) Pr oo f: Th is can be easily verified by applyin g Lemm a 4 D times and summ ing the bou nds. W e are now r eady to p rove the seco nd part o f Theor em 3. 11 Pr oo f: (Stability of Algorithm 1) From (49) on e can easily see that 1 D T DT X n =1 N X i =1 ( U i ( n ) + C i ) ≤ F (0) − F ( D T ) εD T + B 1 ε + ( B 2 + B 3 )( T + 1) 2 ε + β ˜ f max ε ≤ F (0) εD T + B 1 ε + ( B 2 + B 3 )( T + 1) 2 ε + β ˜ f max ε (50) from which ( 18) fo llows from above by takin g D → ∞ . R E F E R E N C E S [1] A. Boulang er , A. Chu, S. Maxx, and D. W altz , “V ehicl e electrific ation : Status and issues, ” Proc. IE E E , vo l. 99, no. 6, pp. 1116–1138, J un. 2011. [2] G. Heydt , “The impact of electric vehicl e deploymen t on load manage- ment strategi es, ” IEE E Tr ans. P ower App. Syst. , vol. P AS-102, no. 5, pp. 1253–1259, May 1983. [3] S. Meliopoulos, J. Meisel , G . Cokkinides, and T . Overby e, “Power system le vel impacts of plug-in hybrid vehicles, ” Powe r Systems En- gineeri ng Research Center (PSE RC), T ech. Rep., Oct. 2009. [4] K. Clement-Nyns, E. Haesen, and J. Driesen, “The impact of char ging plug-in hybrid electri c vehicl es on a residentia l distribut ion grid, ” IEEE T rans. P ower Syst. , vol. 25, no. 1, pp. 371–380, Feb. 2010. [5] L. Fernandez, T . Roman, R. Cossent, C. Domingo, and P . Frias, “ Assessment of the impact of plug-in electr ic vehicl es on distrib utio n netw orks, ” IEE E T rans. P ower Syst. , vol. 26, no. 1, pp. 206–213, Feb . 2011. [6] J. Lopes, F . Soares, and P . Almeida, “Integrat ion of elect ric vehicle s in the electric powe r system, ” Pr oc. IEEE , vol . 99, no. 1, pp. 168–183, Jan. 2011. [7] K. Dyke, N . Schofield, and M. Barnes, “The impact of transport elec- trificat ion on elect rical netw orks, ” IEEE T rans. Ind. Electr on. , vol. 57, no. 12, pp. 3917–3926, Dec. 2010. [8] K. Schneider , C. Gerkensmey er , M. Kintner -Me yer , and R. Fletche r , “Impact assessment of plug-in hybrid v ehicl es on pacific north west distrib ution systems, ” in Proc . P ower Energy Soc. Gen. Meet. , Jul. 2008, pp. 1–6. [9] D. W u, D. Alipra ntis, and K. Gkritza, “Electric energy and po wer consumption by li ght-duty plug-in electric vehicles, ” IE EE T rans. P owe r Syst. , vol. 26, no. 2, pp. 738–746, May 2011. [10] L. Gan, UT , and S. L o w , “Optimal decentra lize d protocols for electric vehi cle chargin g, ” in Pro c. IE EE Conf. on Dec. and Contr . , 2011. [11] Z. Ma, D. Calla wa y , and I. Hiskens, “Dec entral ized charging control for larg e populati ons of plug-in electric vehic les: Applicat ion of the nash certai nty equi v alenc e princ iple, ” in Proc. IEEE Conf . on Dec. and Cont r . , Sep. 2010, pp. 191–195. [12] E. Sortomme, M. Hindi, S. MacPherson, and S. V enkata, “Coordinate d char ging of plug-in hybrid elect ric vehicl es to minimize distrib ution system losses, ” IEEE Tr ans. Smart Grid , vol. 2, no. 1, pp. 198–205, Mar . 2011. [13] N. Rotering and M. Ilic, “Optimal charge control of plug-in hybrid elect ric vehic les in deregulat ed electricit y market s, ” IE EE T ra ns. P ower Syst. , vol. 26, no. 3, pp. 1021–1029, Aug. 2011. [14] D. Bertsekas, Dynamic pr ogr amming and optimal contr ol . Athena Scienti fic, 1995. [15] S. Meyn , Contr ol tec hnique s for comple x ne tworks . Cambridge Uni ve rsity Press, 2008. [16] M. Neely , Stochasti c network optimization with application to commu- nicati on and queuein g systems . Morgan Claypool, 2010. [17] N. McK eown, A. Mekkitt ikul, V . Anan tharam, and J. W alrand, “ Achie v- ing 100throughput in an input-queue d switch, ” IEEE Tr ans. Commun. , vol. 47, no. 8, pp. 1260–1267, Aug. 1999. [18] Q. Li and R. Negi, “Sche duling in wireless networks under uncerta intie s: A greedy primal -dual approach, ” in Proc . IE EE Int. Conf . Commun. , Jun. 2011, pp. 1–5. [19] ——, “Back-p ressure routing and opti mal scheduli ng in wirele ss broad- cast networ ks, ” in Pr oc. IEEE Global Commun. Conf . , Dec. 2009, pp. 1–6. [20] A. Saber and G. V enayag amoorthy , “Plug-in vehicles and renew able ener gy sources for cost and emission reducti ons, ” IEEE T rans. Ind. Electr on. , vol. 58, no. 4, pp. 1229–1238, Apr . 2011. [21] O. Sundstroem and C. Binding, “Opti mizati on methods to plan the char ging of electric vehic le fleets, ” in Pr oc. Int. Conf . on Contr ol, Commun. and P ower Eng. , 2010. [22] S. Deilami, A. Masoum, P . Moses, and M. Masoum, “Real-time coor- dinati on of plug-in electric vehicle chargin g in sm art grids to minimize po wer losses and improve volt age profile, ” IE EE T rans. Smart Grid , vol. 2, no. 3, pp. 456–467, Sep. 2011. [23] K. T uritsyn, N. Sinitsyn, S. Backhaus, and M. Chertkov , “Robust broadca st-communica tion control of elect ric vehic le charg ing, ” in Proc. IEEE SmartGridComm , Oct. 2010, pp. 203–207. [24] R. Lasseter , “Smart distribu tion: Coupled microgrids, ” Pr oc. IEEE , vol. 99, no. 6, pp. 1074–1082, Jun. 2011. [25] S. Han, S. Han, and K. Sezaki, “De ve lopment of an optimal vehicle - to-grid aggrega tor for frequenc y regul ation, ” IEEE T rans. Smart Grid , vol. 1, no. 1, pp. 65–72, Jun. 2010. [26] W . Kersting , “Radial distributi on test feeders, ” in Proc. IE EE P ower Eng. Soc. W in. Meet. , vol. 2, 2001, pp. 908–912. [27] S. C. Edision. (2011) Regulat ory information - s ce load profiles. [On- line]. A v ail able: http://www .sce.com/AboutSC E/Regu latory/loadprofiles/ [28] U. E. I. Admini strati on. (2009 ) Reside ntial avera ge monthly bill by census di vision and state . [Onli ne]. A v aila ble: http:/ /www .eia.gov/c neaf/electricity/ esr/table5.html [29] U. E. P . Agenc y . (2011) 2011 electric vehicles, fuel economy . [Online]. A va ilabl e: http:// www .fueleconomy .gov/fe g/e vsbs.shtml [30] P . Hu and T . Reuscher . (2004, Dec.) Summary of trave l trends. U.S. Departmen t of Transport ation and Federal Highw ay Administrat ion. [Online]. A va ilabl e: http:// nhts.ornl.go v/2001/ pub/STT .pdf Qiao Li (S’07) recei ve d the B.E ngg. degree from the Department of Elec- tronics Information E nginee ring, T singhua Uni versi ty , Beiji ng China , in 2006. He recei ved the M.S. degre e from the Depart ment of E lectr ical and Computer Engineeri ng, Carne gie Mellon Uni ver sity , Pittsburgh , P A USA, in 2008. He is currently a Ph.D. Candidat e in the Department of E lectri cal and Computer Engineeri ng, Carnegie Mellon U ni v ersity . His research interest s include dis- trib uted algorit hms, smart grids technol ogies, and wireless networ king. T ao Cui (S’10) was born in Shaanxi Province, China, in 1985. He receiv ed the B.Sc. and M.Sc. de gree s from Tsinghua Unive rsity , Beijing, China, and is current ly pursuing the P h.D. degree at Carneg ie Mellon Unive rsity , Pittsb ur gh, P A. His main resea rch interests include power system computati on, protection, analysi s, and control . Rohit Negi recei ved the B.T ech. degree in electri cal enginee ring from the Indian Institute of T echnology , Bombay , in 1995. He recei ved the M. S. and Ph.D. degree s from Stanford Univ ersity , CA, in 1996 and 2000, respecti vely , both in el ectri cal enginee ring. Since 2000 , he has been with the Electri cal and Computer E nginee ring Department, Carne gie Mellon Uni ve rsity , Pittsb urgh, P A, where he is a Professor . His research interests include signal processing , coding for communicat ions systems, informatio n theory , networki ng, cross- layer optimizat ion, and sensor networks. Dr . Negi recei ved the President of India Gold Medal in 1995. Franz Franchetti recei ve d the Dipl.-Ing. degre e and the PhD degree in techni cal m athemat ics from the V ienna Univ ersity of T echno logy in 2000 and 2003, respecti vely . Dr . Franchetti has been with the V ienna Univ ersity of T echnology since 1997. He is currently an Assistant Research Professor with the Dept. of Electri cal and Computer Engineerin g at Carnegi e Mellon Uni ve rsity . His research inter ests concent rate on the dev elopment of high performanc e DSP algorit hms. 12 Marija D. Ili ´ c (M’80-SM’86-F’99) is currently a Professor at Carne gie Mel- lon U ni ve rsity , Pittsbur gh, P A, with a joint appointment in the Electri cal and Computer Engineeri ng and Engineering and Public Polic y Departments. She is also the Honorary Chaired Professor for Control of Future E lectr icity Network Operati ons at Delft Univ ersity of T echnology in Delft, The Netherlands. She was an assistant professor at Cornell Uni ver sity , Ithaca, NY , and tenure d Associate Professor at the Uni ve rsity of Illinois at Urbana-Champai gn. She was the n a Seni or Resea rch Scienti st in Department of Elec trica l Engineeri ng and Computer Science, Massachusett s Institute of T echnology , Cambridge, from 1987 to 2002. She has 30 years of experienc e in teaching and research in the area of ele ctric al powe r system model ing and control. Her main interest is in the systems aspects of operations, planning, and economics of the ele ctric po wer industry . She has co-authore d seve ral books in her field of inter est. Prof. Ilic is an IE EE Distinguished Lecturer .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment