On Intrinsic Geometric Stability of Controller
This work explores the role of the intrinsic fluctuations in finite parameter controller configurations characterizing an ensemble of arbitrary irregular filter circuits. Our analysis illustrates that the parametric intrinsic geometric description ex…
Authors: Stefano Bellucci, Bhupendra Nath Tiwari, N. Amuthan
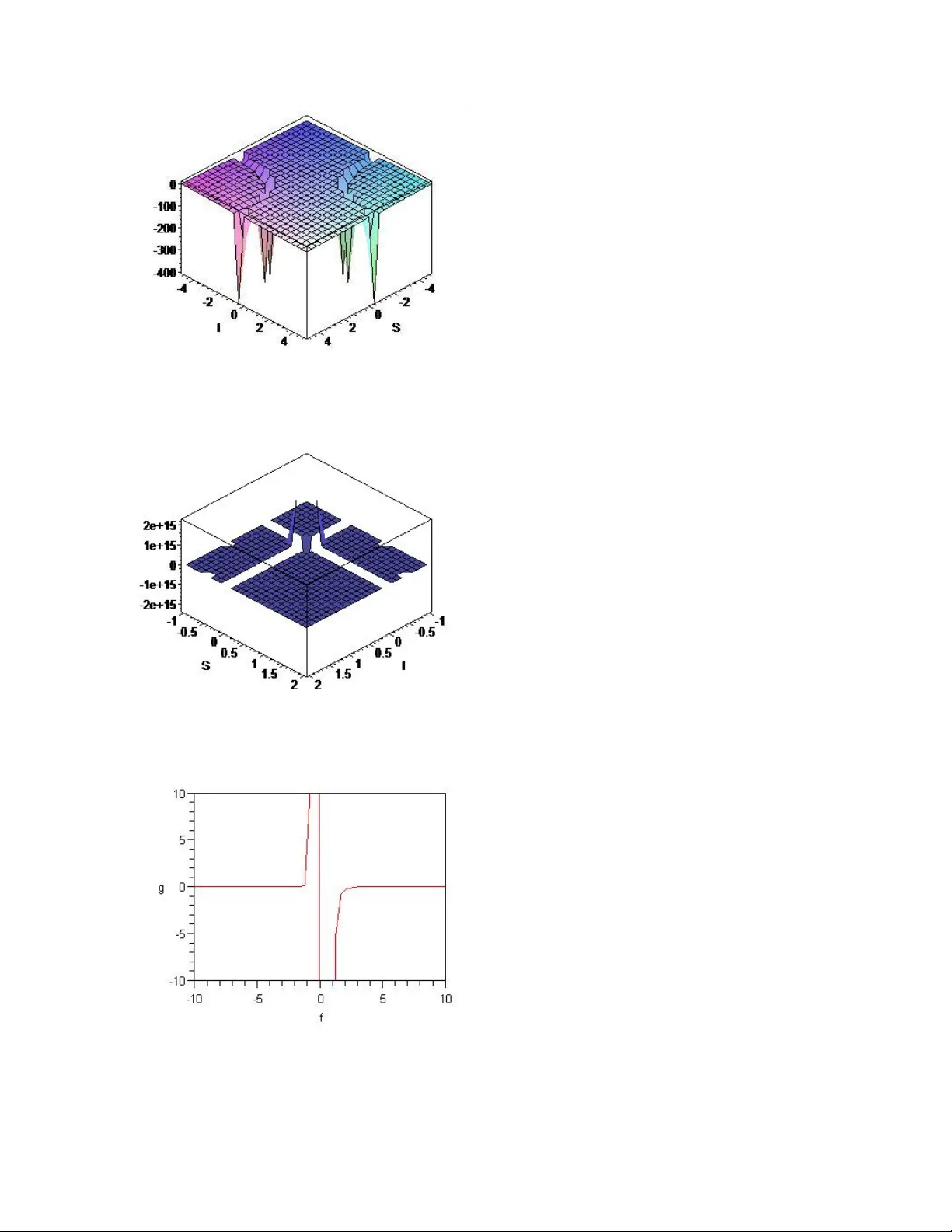
On In trinsic Geometric Stabilit y of Con troller Stefano Bellucci a ∗ , Bh up endra Nath Tiw ari a † , N. Am uthan b, ‡ and S. Krishnakumar c, § a INFN, Lab oratori Nazionali di F rascati, Via E. F ermi 40, 00044 F rascati, Italy . b PET Engineering College, Departmen t of Electrical and Electronic Engineering, V alliyoor, T amil Nadu, India c Departmen t of Physical Science, F acult y of Applied Sciences, V avuniy a Campus o f the Univ ersity of Jaffna, Kurumank adu, V a vuniya, Sri Lank a Abstract This w ork explores the role of the in trinsic fluctuations in finite parameter controller configurations c haracterizing an ensem ble of arbitrary irregular filter circuits. Our analysis illustrates that the parametric in trinsic geometric description exhibits a set of exact pair correction functions and global correlation volume with and without the v ariation of the mismatch factor. The present consideration shows that the canonical fluctuations can precisely b e depicted without any approximation. The intrinsic geometric notion offers a clear picture of the fluctuating controllers, whic h as the limit of the ensem ble a veraging reduce to the specified con troller. F or the constant mismatch factor con trollers, the Gaussian fluctuations o ver equilibrium basis accomplish a w ell-defined, non-degenerate, flat regular in trinsic Riemannian surface. An explicit computation further demonstrates that the underlying pow er correlations inv olve ordinary summations, even if w e consider the v ariable mismatch factor controllers. Our in trinsic geometric framework describes a definite character to the canonical p o wer fluctuations of the controllers and constitutes a stable design strategy for the parameters. Keyw ords: Correlation, Fluctuation, Geometry , Controller, Stability ∗ bellucci@lnf.infn.it † bntiw ari.iitk@gmail.com ‡ amuthannadar@gmail.com § sabakrish@gmail.com 1 1 In tro duction Stable design of con trollers is one of the most interesting researc h issue since the prop osition of the robust con trollers. Such a principle has b een extremely successfully whic h applies in b oth the domestic and industrial application [1]. This follows b ecause of the fact that it is easy in implemen tation and requires less n umber of parameter tuning. F urther, the stably designed controllers are the b est alternative to the existing controllers. This follo ws from the fact that the intrinsic geometric design takes an account of the mo del uncertainties and sp ecifically allo ws for a clear-cut determination of the controller settings and parameters. Such an observ ation is supp orted from the fact that a class of con trollers remains insensitiv e to the time delay and parametric deviation for the first order systems [1]. Global Stability phenomenon are the sub ject matter of [2]. Also, the parametric approach robust controllers ha ve been brought out in the picture with the notions of [3]. An imp ortan t filter design taking an account of the load disturbance is prop osed [4] in order to improv e the sp eed of the tuning resp onse function. The stabilit y of suc h a class of controllers dep ends only on the domain of the controller parameters and so the construction of a nominal plant. In addition, although the system can reached control input saturation, but the stability of the designed con troller can be maintain to only depend on the parameters of the intrinsically designed controller and that of the plant, as p er the outlines of the Ref. [5]. Similar direct mo del reference adaptive controllers [6, 7, 8] are explored in diverse applications. P arametric mo del controller design is one of the b est metho ds to improv e the robust recital of the controller b ecause of the fact that a p olynomial approach is in volv ed in the p erformance improv ement of the controller. The parameters concerning the sp eed of the controller dep end on the mo del parameters and mismatch factor of the lo w pass filter circuit. This is b ecause the robustness of the con trollers and their p erformance depend on the model parameters { a, b } and the mismatch factor f of the filter. In the non-linear domain of the ab o v e parameters, our in trinsic geometric analysis provides a stable characterization of the con trollers. F rom the viewp oin t of the present in terest, Ref.[9] leads us to provide an appropriate mathematical design and parameterization for the controllers. The parameterized equation con troller blo c k diagram is further brough t out into the presen t attention. F rom the out-set of the ab o ve reference [9], we can trac k the desired tra jectory and minimize the plan t error. The key issues concerning the controllers are the sp eed resp onse, low pass filter and geometric mo del. The robust p erformance of suc h a controller is based on these parameters [10, 11]. A nov el approac h is thus made p ossible in the history of con trollers via the present in vestigation. The method as outlined ab ov e is very general in its own and it lea ves different p ossible versions to b e explored further. One of the key issues is an appropriate design of the controller circuits. T o design the parametric internal mo del, one traditionally assumes that one of the parameters of the con troller is in the subset of parametric family of the con troller. It is sometime called finite dimensional parametric mo del. The filtering operations in these con trollers are asso ciated with the parameter inv olved. The distribution of parameters in the parametric model can be taken to b e finite dimensional. F urthermore, the mo del reference parameterizations are tak en into an accoun t [12] and the asso ciated parameterizable metho ds are used to obtain the parametric controllers. Based on the conv en tional design metho d, we offer intrinsic stability analysis of the controllers. The lin- ear parametric p olynomial approach which improv es structures of the bounded parametric con troller integral- deriv ative (id) designs, is explicitly presen ted. Improv emen ts in the limiting linear parametric con trollers are sho wn. It turns out that the presen t in trinsic geometric notion is particularly w ell suited for the practical applications. The mathematical design pro cedure thus taken can b e extended for any controllers. In fact, we ha ve a clear picture of further in vestigation. This has been a real b esto w for stabilization of the conv en tional con trollers. The presen t analysis of controller can further b e used to explore the intrinsic nature of the unmo d- eled part of the plan t and the asso ciated bounded disturbances arising from the fluctuations of parameters and mismatc h factor. In trinsic geometric mo delings in volving equilibrium configurations of the extremal and the non-extremal blac k holes in string theory [13, 14, 15, 16, 17, 18, 19, 20] and M -theory [21, 22, 23, 24] p ossess rich intrinsic geometric structures [25, 26, 27, 28, 29]. There has been muc h w ell fo cused atten tion on the equilibrium p erspective of black holes, and thereby explicates the nature of concerned parametric pair correlations and asso ciated stabilit y of the solutions containing a large num b er of branes and antibranes. Besides several general notions which hav e earlier b een analyzed in the condensed matter physics [30, 31, 32, 33, 34, 35], w e consider sp ecific con troller configurations thus mentioned with equilibrium parameters and analyze p ossible parametric pair correlation functions and their correlation relations. Basically , the in v estigation en tails an intriguing feature of the underlying fluctuations which are defined in terms of the parameters. Giv en a definite cov arian t intrinsic geometric description of a consisten t controller configuration, one can 1 exp ose (i) for what conditions the considered configuration is stable?, (ii) ho w its parametric correlation functions scale in terms of a set of chosen fluctuating circuit parameters? In this pro cess, one can enlist a complete set of non-trivial parametric correlation functions of the con troller configurations [9]. It ma y further b e en visaged that similar considerations remain v alid ov er the black hole solutions in general relativity [36, 37, 38, 39], attractor blac k holes [40, 41, 42, 43, 44, 45] and Legendre transformed finite parameter chemical configurations [46, 47], quan tum field theory and the asso ciated Hot QCD backgrounds [48]. Th us, the differential geometry plays an imp ortan t role in the thermo dynamic study of the controllers. In this pap er, we analyze the stability of the controllers under the fluctuation of the parameters and the mismatc h factor. The controller under co nsideration is depicted in the Fig.[1]. The stabilit y is demonstrated for a suitable design and its parameterizations. F rom the general parametrization equation of the con troller, the stability of blo c k diagram is drawn in to attention. T o the b est of authors’ knowledge, this approach is made p ossible for the first time tow ards the intrinsic geometric stability analysis of controllers. The prop osed metho d is very general and different Legendre transformed versions of the present analysis are p ossible. By employing the standard notion of the intr insic Riemannian geometry , the rest of the sections are devoted to the local and global stability prop erties of fluctuating controllers. 2 Fluctuations in the Controllers The controller circuit of the presen t interest is depicted in the Fig.[1]. Although the analysis of the present in vestigation remains for any controllers, nev ertheless we illustrate it for a class of controllers, which are of an immediate interest as sho wn in the Fig.[1]. Here, s is a complex signal having a mo dulus and an angle of phase. In the subsequent analysis, we denote a lo cally constant signal by the corresp onding uppercase notation S . F urthermore, w e show that the inv estigation of the stabilit y analysis is v alid for the general controllers, and demonstrate that our approach remains consisten t with the other existing ones. Given the controller, w e consider the in trinsic geometric stabilit y of the underlying lo w pass filter system. The parametric stability criterion offers a proficien t metho d to determine the parameters of the circuit and thereby to design the controller as p er ones requiremen t. Ref [49] implemen ts the principle for as asso ciated class of controllers. F rom a close persp ective, suc h an analysis of the controllers tak es an account of the mo del uncertain ties. Sp ecifically , it allows a straightforw ard relation of controller settings with the asso ciated model parameters. Notice further that the first order consid- eration of the controllers is insensitive to time dela y and parameter deviation, and the output is approximately equal to the PI controllers [1]. The resp onse of the controller is sluggish, although it do es not hav e imp ortant o vershoot effects [50] and the in tegral action of such a con troller is used to eliminate the offset of the system. T o explore the stabilit y of the first order con trollers [51], w e design stable controllers from the persp ective of the intrinsic geometry . Ha ving mentioned the domains of the parameters, we consider the following t wo sp ecification of the con- trollers, viz. , constant mismatch factor con trollers, and v ariable mismatch factor controllers. F or arbitrary n th order low pass filter, the controllers of the in trinsic interest are G con ( a, b, f ) := ( S − a )( S + b ) (1 + f S ) n ( S − a ) 2 − ( S + b ) 2 (1) Notice further that the aim of the presen t paper is to expose the p o wer of the intrinsic geometry . In this concern, the con troller described b y the Eqn.(1) serv es only as an example of the presen t consideration. Subsequently , our analysis as the exp osition of the in trinsic geometric in vestigation remains v alid for any smo oth con troller and th us the ab o ve class of the controllers. In order to b egin the subsequent in trinsic geometric analysis of fluctuations, w e introduce the correlation in the controller arising from the fluctuations of the circuits parameters. Th us, w e consider an ensemble of con trollers fluctuating ov er the limiting Gaussian ensemble. In this analysis, we consider that the controllers can hav e non-zero fluctuations due to the vibrations of frequencies, residual ripple factors in the filter circuits, and p ossible other practical uses. This follo ws from the fact that w e do not restrict ourselv es in the sp ecific domains of filter circuit used in the controller. Consequen tly , we allow an ensemble of limiting configurations with finite fluctuations in an arbitrary non linear domain of the parameters and thereb y analyze the nature of a class of generic con trollers. W e also tak e an accoun t of the v ariable mismatc h factor defining the sp eed resp onse tuning parameter of the controller. Notice further that the analysis of the present exp osition is v alid for all range of the parameters of the controllers. Ph ysically , their deviation from the origin signifies a contribution of the non-linear effects of the controller. Sp ecifically , the v alues a = 0 and b = 0 of the parameter signify a purely linear mo del controller. Subsequently , 2 Figure 1: A class of controllers as the function of parameters a and b , describing fluctuations of the controller with a given mismatc h factor f . the stability of the controller can be analyzed in the non large frequency domains. This is b ecause the present analysis is devoted for the controllers whic h are defined as the n th -order low pass filter circuit. Suc h a notion is observed, when there are ripples in the filter circuits of the controller. 3 Constan t Mismatc h Con trollers Let us first describ e the intrinsic stability of the controller with a given mismatc h factor. The correlations are describ ed by the Hessian matrix of the controller, defined with a set of desired corrections ov er a c hosen mo del mismatc h factor f under the tuning resp onse function. F ollowing Eqn.(1), the comp onents of the metric tensor defined as H ess ( G con ( a, b )) reduce to the following expressions: g aa = 2( S + b )( S − a )(1 + f S ) n { 3( S − a ) 2 (1 + f S ) n + ( S + b ) 2 } { (1 + f S ) n ( S − a ) 2 − ( S − b ) 2 } 3 g ab = { ( S − a ) 4 (1 + f S ) 2 n + 6( S − a ) 2 ( S + b ) 2 (1 + f S ) n + ( S + b ) 4 } { (1 + f S ) n ( S − a ) 2 − ( S − b ) 2 } 3 g bb = 2( S + b )( S − a ) { 3(1 + f S ) n ( S − a ) 2 + ( S + b ) 2 } { (1 + f S ) n ( S − a ) 2 − ( S − b ) 2 } 3 (2) In this framew ork, we observe that the geometric nature of parametric pair correlations divulges the notion of fluctuating con trollers. Th us, the fluctuating con trollers ma y b e easily determined in terms of the in trinsic parameters of the underlying circuit configurations. Moreov er, it is evident for a giv en con troller that the principle comp onen ts of the metric tensor signify self pair correlations, which are p ositiv e definite functions o ver a range of the parameters. Physically , this signifies a set of heat capacities against the intrinsic interactions on the configuration ( M 2 ( R ) , g ) of the controller. It is w orth mentioning that the controllers turn out to b e w ell-b eha ved for the generic v alues of the param- eters. Over the domain of the circuit parameters { a, b } , we notice that the Gaussian correlations form stable correlations, if the determinant of the metric tensor Det ( g ) = − { (1 + f S ) n ( S − a ) 2 + ( S + b ) 2 } 2 { (1 + f S ) n ( S − a ) 2 − ( S + b ) 2 } 4 (3) remains a p ositiv e function on the parametric surface ( M 2 ( R ) , g ). What follo ws further is that we sp ecialize ourselv es for the physical v alues of the parameters, and subsequently , we analyze the stability for a = 0 , b = 0 corresp onding to the linear controllers Fig.[2]. Under such a limiting sp ecification of the parameters, the lo cal correlation functions reduce to the set of following expressions: g aa = 6 S 4 (1 + f S ) 2 n + 2(1 + f S ) n ((1 + f S ) n − 1) 3 , g bb = 2 S 4 (3(1 + f S ) n + 1) ((1 + f S ) n − 1) 3 g ab = 1 S 2 (1 + f S ) 2 n + 6(1 + f S ) n + 1 ((1 + f S ) n − 1) 3 (4) F or a = 0 , b = 0, the determinants of the metric tensor reduce to the following expression: Det ( g ) = − 1 S 4 (1 + f S ) 2 n + 2(1 + f S ) n + 1 ((1 + f S ) n − 1) 4 (5) 3 Figure 2: Linear controller as the limiting v alues of the parameters a = 0 and b = 0, describ ed with an intrinsic mismatc h factor f . Figure 3: The determinant of the metric tensor plotted as the function of an in trinsic mismatch factor f with giv en parameters a and b , describing the fluctuations in the controllers. The b eha vior of the determinant of the metric tensor shows that such con trollers b ecome unstable for sp ecific v alues of the mismatc h factor. F or S = 1 and n = 1, the nature of the determinant of the metric tensor is depicted in the Fig.[3]. It is w orth mentioning further that the constan t mismatch controllers b ecome highly unstable in the limit of v anishing mismatch factor. Sp ecifically , the system acquires a throat in the regime of | f | ≤ 0 . 7. In order to explain the nature of transformation of the parameters { a, b } forming an intrinsic surface, we examine the functional b eha vior of the asso ciated Christoffel connections. A direct computation yields that the limiting non-trivial Christoffel connections reduce to the following expressions: Γ aaa = 3 S 3 (1 + f S ) 3 n + 6(1 + f S ) 2 n + (1 + f S ) n ((1 + f S ) n − 1) 4 Γ aab = 1 S 3 (1 + f S ) 3 n + 14(1 + f S ) 2 n + 9(1 + f S ) n ((1 + f S ) n − 1) 4 Γ aba = 1 S 3 (1 + f S ) 3 n + 14(1 + f S ) 2 n + 9(1 + f S ) n ((1 + f S ) n − 1) 4 Γ abb = 1 S 3 9(1 + f S ) 2 n + 14(1 + f S ) n + 1 ((1 + f S ) n − 1) 4 Γ bba = 1 S 3 9(1 + f S ) 2 n + 14(1 + f S ) n + 1 (1 + f S ) n − 1) 4 Γ bbb = 3 S 3 (1 + f S ) 2 n + 6(1 + f S ) n + 1 ((1 + f S ) n − 1) 4 (6) The present inv estigation sho ws that a typical controller is globally un-correlated ov er all p ossible Gaussian 4 fluctuations of the parameters { a, b } . As the matter of fact, the correlation length of underlying nearly equi- librium system is global c haracterized b y the scalar curv ature of ( M 2 , g ). This follows from the fact that the scalar curv ature, arising from the definition of the Gaussian fluctuations ov er the parameters { a, b } , v anishes iden tically for the constant mismatch factor controllers. F or the abov e type of controllers with a c hosen mismatc h factor, we see that the Riemann Christoffel curv ature tensor v anishes iden tically o ver the en tire { a, b } surface. Thus, the present in trinsic geometric analysis an ticipate that a constant mismatch con troller is alwa ys a non-interacting system o ver the surface of fluctuating parameters { a, b } . 4 Fluctuating Mismatc h Con trollers In the present section, we explore the nature of an ensemble of generic controllers generated with a v ariable mismatc h factor. T o consider the most general case, we chose the controller as the function of mismatc h factor along with the other system parameters. When the mismatch factor is allow ed to fluctuate, we exploit the definition of the Hessian function H ess ( G con ( a, b, f )). F ollo wing Eqn.(1), w e see for the v ariable mismatc h factor con trollers hav e a set of in teresting prop erties. It follows that the pure pair correlations { g aa , g ab , g bb } b et w een the parameters { a, b } remain the same as depicted in the Eqn.(2) for the constant mismatch factor con trollers. The remaining parametric pair correlations, inv olving the v ariation of the mismatc h factor f , are giv en by the following set of equations: g af = − nS ( S + b )( S − a ) 2 (1 + f S ) n − 1 { (1 + f S ) n ( S − a ) 2 + 3( S + b ) 2 } { (1 + f S ) n ( S − a ) 2 − ( S + b ) 2 } 3 g bf = − nS ( S − a ) 3 (1 + f S ) n − 1 { (1 + f S ) n ( S − a ) 2 + 3( S + b ) 2 } { (1 + f S ) n ( S − a ) 2 − ( S + b ) 2 } 3 g f f = nS 2 ( S − a ) 3 ( S + b )(1 + f S ) n − 2 { ( n + 1)(1 + f S ) n ( S − a ) 2 + ( n − 1)( S + b ) 2 } { (1 + f S ) n ( S − a ) 2 − ( S + b ) 2 } 3 (7) W e see that the fluctuations of the mismatch factor controller comply physically exp ected conclusions. In particular, the heat capacities, defined as the self-pair correlations, remain p ositive quantities for well-defined con trollers. A straightf orward computation further demonstrate the o verall nature of the parametric fluctua- tions. A v ariable mismatch factor controller is stable under the set of Gaussian fluctuations, if the associated principle minors { p 2 , p 3 } remain p ositiv e functions on the manifold ( M 3 , g ). Subsequen tly , an explicit compu- tation shows that the stability constraint on the ab -surface is given b y p 2 := − m 0 + m 1 (1 + f S ) 2 n + m 2 (1 + f S ) 4 n ((1 + f S ) n ( S − a ) 2 − ( S − b ) 2 ) 6 (8) where the p olynomials m i ( S ) are given as m 0 ( S ) = S 8 + 8 bS 7 + 28 b 2 S 6 + 56 b 3 S 5 + 70 b 4 S 4 + 56 b 5 S 3 + 28 b 6 S 2 + 8 b 7 S + b 8 m 1 ( S ) = − 2 S 8 + 8( a − b ) S 7 − 4(3 b 2 + 3 a 2 − 8 ab ) S 6 + 8( a 3 − b 3 + 6 ab 2 − 6 a 2 b ) S 5 − 2( a 4 + b 4 + 36 a 2 b 2 − 16 a 3 b − 16 b 3 a ) S 4 + 8(6 a 3 b 2 − 6 b 3 a 2 − a 4 b + b 4 a ) S 3 − 4(3 a 4 b 2 + 3 b 4 a 2 − 8 b 3 a 3 ) S 2 − 8 b 3 a 3 ( a − b ) S − 2 b 4 a 4 m 2 ( S ) = S 8 − 8 aS 7 + 28 a 2 S 6 − 56 a 3 S 5 + 70 a 4 S 4 − 56 a 5 S 3 + 28 a 6 S 2 − 8 a 7 S + a 8 (9) The stability constraint on the entire configuration is determined b y the determinan t of the metric tensor Det ( g ) = − ( S − a ) 3 ( S + b ) nS 2 (1 + f S ) 2 ((1 + f S ) n ( S − a ) 2 − ( S + b ) 2 ) 7 g 1 ( a, b, f ) (10) Notice that the co-ordinate charts on ( M 3 , g ) are describ ed b y the parameters { a, b } and mismatch factor f of the con troller. In Enq(10), the determinan t of the metric tensor can ha ve a p ositiv e v alue, if the functions g 1 ( a, b, f ) defined as g 1 ( a, b, f ) := ( n − 1) h 1 ( S )(1 + f S ) n + (3 n − 1) h 2 ( S )(1 + f S ) 2 n +(3 n + 1) h 3 ( S )(1 + f S ) 3 n + ( n + 1) h 4 ( S )(1 + f S ) 4 n (11) tak e a negative v alue ov er ( M 3 , g ). In Eqn.(11), it turns out that { h k ( S ) } reduce to the following p olynomials: h 1 ( S ) = S 6 + 20 S 3 b 3 + 6 S 5 b + 15 S 2 b 4 + 15 S 4 b 2 + 6 b 5 S + b 6 h 2 ( S ) = S 6 − 2 S 5 a + 4 S 5 b − 8 S 4 ab + 6 S 4 b 2 + S 4 a 2 + 4 S 3 a 2 b − 12 S 3 ab 2 +4 S 3 b 3 + 6 S 2 a 2 b 2 + S 2 b 4 − 8 S 2 ab 3 + 4 S a 2 b 3 − 2 S ab 4 + a 2 b 4 h 3 ( S ) = S 6 − 4 aS 5 + 2 S 5 b + 6 a 2 S 4 + S 4 b 2 − 8 aS 4 b − 4 a 3 S 3 + 12 a 2 S 3 b − 4 aS 3 b 2 + a 4 S 2 − 8 a 3 S 2 b + 6 a 2 S 2 b 2 − 4 a 3 S b 2 + 2 a 4 S b + a 4 b 2 h 4 ( S ) = S 6 − 6 aS 5 + 15 a 2 S 4 − 20 a 3 S 3 + 15 a 4 nS 2 − 6 S a 5 + a 6 (12) 5 It is not difficult to compute an exact expression for the scalar curv ature describing the global parametric in trinsic correlations. By defining set of controller functions, we find explicitly that the most general scalar curv ature can b e presen ted as R = − n 2 D 2 P 5 k =0 ( w k r k (1 + f S ) kn ( S + b )( S − a ) (13) where the co-efficients { r i ( a, b ) } app earing in the numerator can b e written as the following p olynomials r 0 = S 10 + 10 S 9 b + 45 S 8 b 2 + 120 S 7 b 3 + 210 S 6 b 4 + 252 b 5 S 5 +210 b 6 S 4 + 210 b 7 S 3 + 45 b 8 S 2 + 10 b 9 S + b 10 r 1 = − S 10 + 2( a − 4 b ) S 9 + (16 ab − 28 b 2 − a 2 ) S 8 +8(7 ab 2 − 7 b 3 − a 2 b ) S 7 + 14(8 ab 3 − 5 b 4 − 2 a 2 b 2 ) S 6 +28(5 ab 4 − 2 b 5 − 2 a 2 b 3 ) S 5 + 14(8 ab 5 − 2 b 6 − 5 a 2 b 4 ) S 4 +8(7 ab 6 − b 7 − 7 a 2 b 5 ) S 3 + (16 ab 7 − b 8 − 28 a 2 b 6 ) S 2 +2 ab ( b 7 − 4 ab 6 ) S − a 2 b 8 r 2 = − S 10 + (4 a − 6 b ) S 9 + (24 ab − 15 b 2 − 6 a 2 ) S 8 +(60 ab 2 − 36 a 2 b − 20 b 3 + 4 a 3 ) S 7 +(80 ab 3 − 15 b 4 + 24 a 3 b − 90 a 2 b 2 − a 4 ) S 6 +(60 a 3 b 2 − 120 a 2 b 3 + 60 ab 4 − 6 a 4 b − 6 b 5 ) S 5 +(80 a 3 b 3 − b 6 − 90 a 2 b 4 + 24 ab 5 − 15 a 4 b 2 ) S 4 +(60 a 3 b 4 + 4 ab 6 − 20 a 4 b 3 − 36 a 2 b 5 ) S 3 +(24 a 3 b 5 − 6 a 2 b 6 − 15 a 4 b 4 ) S 2 +(4 a 3 b 6 − 6 a 4 b 5 ) S − a 4 b 6 r 3 = S 10 + (4 b − 6 a ) S 9 + (6 b 2 + 15 a 2 − 24 ab ) S 8 +(4 b 3 − 20 a 3 + 60 a 2 b − 36 ab 2 ) S 7 +( b 4 − 80 a 3 b + 90 a 2 b 2 + 15 a 4 − 24 ab 3 ) S 6 +(60 a 4 b − 6 a 5 − 120 a 3 b 2 + 60 a 2 b 3 − 6 ab 4 ) S 5 +( a 6 − 24 a 5 b − 80 a 3 b 3 + 90 a 4 b 2 + 15 a 2 b 4 ) S 4 +(4 a 6 b − 20 a 3 b 4 + 60 a 4 b 3 − 36 a 5 b 2 ) S 3 +(6 a 6 b 2 − 24 a 5 b 3 + 15 a 4 b 4 ) S 2 +(4 a 6 b 3 − 6 a 5 b 4 ) S + a 6 b 4 r 4 = S 10 + (2 b − 8 a ) S 9 + ( b 2 − 16 ab + 28 a 2 ) S 8 +(56 a 2 b − 56 a 3 − 8 ab 2 ) S 7 + (70 a 4 + 28 a 2 b 2 − 112 a 3 b ) S 6 +(140 a 4 b − 56 a 3 b 2 − 56 a 5 ) S 5 + (28 a 6 − 112 a 5 b + 70 a 4 b 2 ) S 4 +(56 a 6 b − 56 a 5 b 2 − 8 a 7 ) S 3 + ( a 8 − 16 a 7 b + 28 a 6 b 2 ) S 2 +(2 a 8 b − 8 a 7 b 2 ) S + a 8 b 2 r 5 = S 10 − 10 aS 9 + 45 a 2 S 8 − 120 a 3 S 7 + 210 a 4 S 6 − 252 a 5 S 5 +210 a 6 S 4 − 120 a 7 S 3 + 45 a 8 S 2 − 10 a 9 S + a 10 (14) The weigh ts { w i } o ccurring in the summation of the numerator of Eqn.(13) are given b y the sequence w i := {− 6( n − 1) , (9 n − 1) , (10 n + 16) , (8 n − 18) , (16 n + 18) , ( n + 1) } (15) F urthermore, it turns out that D ( a, b ) appearing in the denominator of the scalar curv ature, Eqn.(13), is expressed as the following function D = ( n − 1)( S 4 + 4 S 3 b + 6 S 2 b 2 + 4 S b 3 + b 4 ) +(1 + f S ) n (2 nS 4 + 4 n ( b − a ) S 3 + 2 n ( b 2 − 4 ab + a 2 ) S 2 + 4 nab ( a − b ) S + 2 na 2 b 2 ) +(1 + f S ) 2 n ( n + 1)( S 4 − 4 S 3 a + 6 S 2 a 2 − 4 S a 3 + a 4 ) (16) Consequen tly , w e may easily exp ose the asso ciated imp ortan t conclusions for the sp ecific considerations of the v ariable mismatch factor controllers. The global nature of phase transitions can b e thus explored o ver the range of parameters describing the con trollers of interest. F or the limiting linear controllers corresp onding to the v alues a = 0 , b = 0, the limiting intrinsic scalar curv ature simplifies to the following ratio of series R = P 5 k =0 t k (1 + f S ) kn (( n + 1)(1 + f S ) 2 n + 2 n (1 + f S ) n + n − 1) 2 (17) where t i ( n ) are defined by the follo wing sequence t i := { 3 n ( n − 1) , 9 2 n ( n − 1) , n (5 n + 8) , − n (4 n − 9) , − n (8 n + 9) , − 1 2 n ( n + 1) } (18) 6 Figure 4: The curv ature scalar plotted as the function of a v ariable mismatc h factor f and S with given parameters a and b , describing the fluctuations in the controllers. Figure 5: The determinant of the metric tensor plotted as the function of a v ariable mismatch factor f and S with given parameters a and b , describing the stabilit y of the controllers. Figure 6: The determinant of the metric tensor plotted as the function of a v ariable mismatc h factor f with giv en parameters a and b , describing the fluctuations in the linear controllers. 7 Figure 7: The curv ature scalar plotted as the function of a v ariable mismatc h factor f with giv en parameters a and b , describing the fluctuations in the linear controllers. Eqn.(17) shows that the global interactions exist for the limiting linear v alues of the v ariable mismatch factor con trollers. This follo ws from the fact that the co efficients of the scalar curv ature Eqn.(17), signifying the global correlation volume of controller, remain non-zero in the linear limit. In the limit of n = 1, the Eqn.(17) sho ws further that the scalar curv ature diverges on the f S -surface of the ro ot of (2 + f S ) 2 . The graphical views of the curv ature scalar of the v ariable mismatch factor controllers are depicted in the t wo and three dimensions. The intrinsic c haracterization offered in (i) Fig.[4] is ov er the three dimensions and (ii) Fig.[7] is o ver the tw o dimensions. This describ es the precise global b ehavior of the parametric fluctuations o ver the en tire intrinsic manifold ( M 3 , g ) for the limiting linear v ariable mismatch con trollers Fig.[2]. F or the limiting linear con trollers, it is w orth mentioning that the lo cal pair correlations, as the comp onents of the metric tensor, hav e an exp ected b eha vior. The pure pair correlations reduce as the Eqn.(4). The others in volving a v ariation of the mismatch factor reduce to the following equations: g af = − n (1 + f S ) 2 n − 1 + 3(1 + f S ) n − 1 ((1 + f S ) n − 1) 3 , g bf = − n (1 + f S ) 2 n − 1 + 3(1 + f S ) n − 1 ((1 + f S ) n − 1) 3 g f f = S 2 n (1 + f S ) 2 n − 2 ( n + 1) + (1 + f S ) n − 2 ( n − 1) ((1 + f S ) n − 1) 3 (19) In the case of the limiting linear con trollers, w e observ e further that the determinant of the metric tensor reduces to the following expression: Det ( g ) = − nS − 2 (1 + f S ) n − 2 ((1 + f S ) n − 1) − 7 ( n + 1)(1 + f S ) 3 n + (3 n + 1)(1 + f S ) 2 n +(3 n − 1)(1 + f S ) n + ( n − 1) (20) It is imp ortan t to notice that the global stability of the con trollers may b e determined by observing the sign of the determinant of the metric tensor. F or n = 1, w e find that the determinant of the metric tensor reduces to the following expression: Det ( g ) = − 2 S 2 (1 + f S ) 2 + 2(1 + f S ) 3 + (1 + f S ) 4 (1 + f S ) 2 ((1 + f S ) − 1) 7 (21) The b eha vior of the determinan t of the metric tensor shows that the v ariable mismatch factor controller b ecomes unstable for the sp ecific v alues | f | ≤ 1 . 2 of the asso ciated mismatc h factor. F or the general v alue the S , the nature of the determinan t of the metric tensor is depicted in the Fig.[5]. F or S = 1 and n = 1, the corresp onding surface nature of the determinant of the metric tensor is depicted in the Fig.[6]. In con trast to the constant mismatc h factor con trollers, we notice in the presen t section that the determinant of the metric tensor reduces to the cusp form in the regime of f → 0. In this domain of the mismatch factor, 8 w e observe that the v ariable mismatch factor controllers are relatively less stable than the constant mismatc h factor controllers. The corresponding surface behavior of the scalar curv ature is depicted in the Fig.[7]. This describ es the global phase prop erties of the v ariable mismatch factor controllers. It is shown that the non-zero v alue of intrinsic scalar curv ature further demonstrate the existe nce of a finite correlation volume. Sp ecifically , the phase stability of typical controllers with a v ariable mismatch factor can th us be easily determined b y analyzing the nature of the scalar curv ature in the domain of in terest. This has b een depicted in the Figs.[4, 7], in which w e show the global nature of the parametric correlations. The further observ ation of the Fig.[4] sho ws that the v ariable mismatc h factor con troller systems ha ve no phase transitions on the parametric manifold ( M 3 , g ). Subsequently , the global nature of v ariable mismatch factor controllers is well explicable against the lo cal fluctuations of the mo del parameters { a, b } and mismatch factor f of the controller. 5 Conclusion The intrinsic geometric design of con trollers is offered under the fluctuations of the mo del parameters and mismatc h factor. Such fluctuations are exp ected to arise due to non-zero heating effects, c hemical reactions and p ossible con ven tional corruptions asso ciated with the controller under the application. The intrinsic geometric metho d is used to improv e the structure of the b ounded parametric con troller id thus designed. It is pictorially presen ted for the limiting p olynomial approac h corresp onding to the limiting linear parametrization. The stabilit y analysis thus introduced is most generic for the fluctuations of the parameter and the mismatch factor the controllers. The present analysis is well suited for practical applications. The intrinsic geometric design pro cedure is presen ted for the controllers with a (i) constant and (ii) v ariable mismatch factor. In this concern, the Fig.(3) and Fig.(6) show the respective determinan ts of the metric tensor for the constant and v ariable mismatch factor con trollers. These figures illustrate that the typical instabilit y app ears as (i) a throat for the constant mismatc h factor controllers and (ii) a cusp for the v ariable mismatch factor controllers. Subsequen tly , a straightforw ard comparison may b e made b et w een the stability prop erties of the constant and the v ariable mismatch factor con trollers. In the first case, it turns out that the asso ciated controllers corresp ond to a non-interacting system, while in the second case such a controller configuration corresp onds to an interacting system. This follo ws from the fact that the manifold of parameters is flat in the first case, while it b ecomes curved for the v ariable mismatc h factor con trollers. In the limit of f → 0, we hav e shown in the first case that the determinant of the metric tensor acquires a throat, whereas the determinant of the metric tensor of the v ariable m ismatc h factor controllers acquires a cusp in this limit. Th us, the present in vestigation predicts that the con troller systems with the constan t mismatc h factor are relativ ely more stable and b etter-b eha ved than those with the v ariable mismatc h factor. In addition, our mo del is well suited for the robust con trollers. Such con trollers are very p opular no w a days, b ecause of their high p erformance and low main tenance needs. F rom the commercial viewp oin ts, such a robust controller is very lucrative. It is worth mentioning that the use of the intrinsic geometric principle is rapidly growing in robust controller design in recent years. Based on the definition of the controller, the intrinsic stability analysis remains compatible for parametrically stable des igns of the controller and their modern appliances. The present analysis th us pro vides the intrinsic geometric front to the stability analysis of existing controllers and their p ossible future generations. It may be also used, in order to mo del in a suitable fashion the un-mo deled part of the plant and the b ounded disturbances. Finally , it is en visaged that our analysis offers persp ectiv e stabilit y grou nds, when applied to the electrical plants. It is exp ected further that the presen t inv estigation would b e an important factor in an appropriate design of the safet y guards, which can w ork as the indicators under fluctuations of the parameters, mismatch factor and the other p ossible comp onen ts. Ac kno wledgmen t B. N. T. thanks Prof. V. Ra vishank ar for the support and encouragement. The w ork of BNT has b een supp orted b y the p ostdoctoral research fello wship of “INFN-L ab or atori Nazionali di F r asc ati, R oma, Italy” . 9 References [1] L. Harnefors and H. P . Nee, “Robust current control of AC machines using the internal mo del control metho d,” r IEEE Industry Application Conference, 1995. 30th IAS Annual Meeting, V ol.1, pp. 303-309, 8-12 Oct. 1995. [2] I. M. Y. Mareels, B. E. Ydstie “Global Stability for an MIT Rule based Adaptive Con trol Algorithm”, Pro ceedings of the 28th Conference On Decision and Con trol T ampa, Florida, pp: 1585-1590, December 1989. [3] S. P . Bhattacharyy a, H. Chapellat and L. H. Keel, “Robust Con trol-The P arametric approach,” r 1995 b y prentice Hall. [4] I. G. Horn, J. R. Arulandu, C. J. Gombas, J. G. V. Ant werp, and R. D. Braatz, “Improv ed Filter Design in Internal Mo del Control”, Ind. Eng. Chem. Res. 1996, 35, 3437-3441. [5] K. Y amada, “Mo dified In ternal Model Con trol for unstable systems”, Pro ceedings of the 7th Mediterranean Conference on Control and Automation (MED99) Haifa, Israel - June 28-30, 1999, pp: 293-302. [6] N. Am uthan and S. N. Singh, “Direct Mo del Reference Adaptiv e In ternal Mo del Controller using Perrin equation adjustment mechanism for DFIG Wind F arms,” IEEE-ICI IS 2008, DEC 8-10, I ITK GP . [7] N. Am uthan and S. N. Singh, “Direct Mo del Reference Adaptive Inter nal Mo del Controller for DFIG Wind F arms,” International Journal of Recen t T rends in Engineering, Issue: 1, V ol: 1, May 2009, pp: 7-11. [8] N. Amuthan, “Direct Mo del Reference Adaptive Internal Mo del Controller for DFIG Wind F arms with dither injection”, IEEE-ICPS 2009, I ITK GP . [9] N. Amuthan and S. Krishnakumar, “Design of Linear Parametric Internal Mo del Controller-polynomial approac h”, Journal of Electrical and Electronics Engineering, V ol: 2, Nr.2, pp: 114-117, June 2009. [10] N. Amuthan, R. Mohan and N. Siv akumar, “Dynamic speed resp onse of the internal mo del controller with dither injection”, ICCNT, pp: 25-27. July-2009. [11] N. Amuthan, R. Mohan, N. Siv akumar and T. Sugany a, “Dynamic sp eed resp onse of internal model con troller for time delay plant with dither injection”, International Journal of Recent T rends in Engineering, V ol:2, No: 7, pp:16-18, Nov 2009. [12] P . A. Ioannou and J. Sun, “Robust Adaptive Con trol”, r 1996 by pren tice Hall, Inc. [13] A. Strominger, C. V afa, “Microscopic Origin of the Bek enstein-Hawking En tropy ,” Ph ys. Lett. B 379, 99-104, (1996), arXiv:hep-th/9601029v2 . [14] A. Sen, “Blac k Hole Solutions in Heterotic String Theory on a T orus,” Nucl. Ph ys. B440 (1995) 421-440, arXiv:hep-th/9411187v3 . [15] A. Sen, “Extremal Black Holes and Elemen tary String States,” Mo d. Phys. Lett. A10 (1995) 2081-2094, arXiv:hep-th/9504147v2 . [16] A. Dabholk ar, “Exact Counting of Black Hole Microstates,” Ph ys. Rev. Lett. 94 (2005) 241301, arXiv:hep-th/0409148v2 . [17] L. Andrianop oli, R. D’Auria, S. F errara, “Flat Symplectic Bundles of N-Extended Sup ergra vities, Central Charges and Black-Hole En tropy ,” arXiv:hep-th/9707203v1 . [18] A. Dabholk ar, F. Denef, G. W. Mo ore, B. Pioline, “Precision Counting of Small Black Holes,” JHEP 0510 (2005) 096, arXiv:hep-th/0507014v1 . [19] A. Dabholk ar, F. Denef, G. W. Mo ore, B. Pioline, “Exact and Asymptotic Degeneracies of Small Black Holes,” JHEP 0508 (2005) 021, arXiv:hep-th/0502157v4 . [20] A. Sen, “Stretc hing the Horizon of a Higher Dimensional Small Blac k Hole,” JHEP 0507 (2005) 073, arXiv:hep-th/0505122v2 . [21] J. P . Gauntlett, J. B. Guto wski, C. M. Hull, S. Pakis, H. S. Reall, “All supersymmetric solutions of minimal sup ergra vit y in fiv e dimensions,” Class. Quant. Grav. 20 (2003) 4587-4634, arXiv:hep-th/0209114v3 . [22] J. B. Guto wski, H. S. Reall, “General sup ersymmetric AdS5 blac k holes,” JHEP 0404 (2004) 048, arXiv:hep-th/0401129v3 . [23] I. Bena, N. P . W arner, “One Ring to Rule Them All ... and in the Darkness Bind Them ?,” Adv.Theor.Math.Ph ys. 9 (2005) 667-701, arXiv:hep-th/0408106v2 . 10 [24] J. P . Gauntlett, J. B. Gutowski, “General Concentric Black Rings,” Ph ys. Rev. D71 (2005) 045002, arXiv:hep-th/0408122v3 . [25] T. Sark ar, G. Sengupta, B. N. Tiw ari, “On the Thermo dynamic Geometry of BTZ Blac k Holes,” JHEP 0611 (2006) 015, arXiv:hep-th/0606084v1 . [26] T. Sark ar, G. Sengupta, B. N. Tiw ari, “Thermo dynamic Geometry and Extremal Black Holes in String Theory ,” JHEP 0810 , 076, 2008, arXiv:0806.3513v1 [hep-th] . [27] B. N. Tiw ari, “Sur les corrections de la g ´ eom ´ etrie thermodynamique des trous noirs,” Pro c. Quantum Gra vity , Ho elbac k 2008, arXiv:0801.4087v1 [hep-th] . [28] S. Bellucci, B. N. Tiwari, “On the Microscopic Perspective of Black Branes Thermodynamic Geometry ,” arXiv:0808.3921v1 [hep-th] , [Submitted for publication]. [29] S. Bellucci, B. N. Tiwari, “An exact fluctuating 1/2-BPS configuration,” JHEP 05 (2010) 023, arXiv:0910.5314v2 [hep-th] . [30] G. Ruppeiner, “Riemannian geometry in thermo dynamic fluctuation theory ,” Rev. Mo d. Phys 67 (1995) 605, Erratum 68 (1996) 313. [31] G. Rupp einer, “Thermo dynamics: A Riemannian geometric mo del,” Ph ys. Rev. A 20 , 1608 (1979). [32] G. Rupp einer, “Thermo dynamic Critical Fluctuation Theory?,” Phys. Rev. Lett. 50 , 287 (1983). [33] G. Ruppeiner, “New thermodynamic fluctuation theory using path in tegrals,” Ph ys. Rev. A 27 ,1116,1983. [34] G. Rupp einer and C. Davis, “Thermo dynamic curv ature of the multicomponent ideal gas,” Phys. Rev. A 41 , 2200, 1990. [35] G. Rupp einer, “Thermo dynamic curv ature and phase transitions in Kerr-Newman black holes,” Phy . Rev. D 78 , 024016 (2008) [36] J. E. Aman, I. Bengtsson, N. Pidokra jt, “Flat Information Geometries in Blac k Hole Thermo dynamics,” Gen. Rel. Grav. 38 (2006) 1305-1315, arXiv:gr-qc/0601119v1 . [37] J. Shen, R. G. Cai, B. W ang, R. K. Su, “Thermodynamic Geometry and Critical Behavior of Black Holes,” In t. J. Mo d. Ph ys. A22 (2007) 11-27, arXiv:gr-qc/0512035v1 . [38] J. E. Aman, I. Bengtsson, N. Pidokra jt, “Geometry of blac k hole thermo dynamics,” Gen. Rel. Gra v. 35 (2003) 1733, arXiv:gr-qc/0304015v1 . [39] J. E. Aman, N. Pidokra jt, “Geometry of Higher-Dimensional Black Hole Thermodynamics,” Phys. Rev. D73 (2006) 024017, arXiv:hep-th/0510139v3 . [40] S. F errara, R. Kallosh, A. Strominger, “N=2 Extremal Blac k Holes,” Ph ys. Rev. D52 (1995) R5412-R5416, arXiv:hep-th/9508072v3 . [41] Andrew Strominger, “Macroscopic Entrop y of N = 2 Extremal Black Holes,” Ph ys. Lett. B383 (1996) 39-43, arXiv:hep-th/9602111v3 . [42] S. F errara, R. Kallosh, “N=2 Extremal Blac k Holes,” Ph ys. Rev. D54 (1996) 1514-1524, arXiv:hep-th/9602136 . [43] S. F errara, G. W. Gibb ons, R. Kallosh, “N=2 Extremal Black Holes,” Nucl. Phys. B500 (1997) 75-93, arXiv:hep-th/9702103 . [44] S. Bellucci, S. F errara, A. Marrani, “A ttractor Horizon Geometries of Extremal Black Holes,” Con- tribution to the Pro ceedings of the XVI I SIGRA V Conference, 4-7 Septem b er 2006, T urin, Italy , arXiv:hep-th/0702019 . [45] S. Bellucci, S. F errara, A. Marrani, “Attractors in Blac k,” F ortsch. Ph ys. 56 (2008) 761, . [46] F. W einhold, “Metric geometry of equilibrium thermo dynamics,” J. Chem. Phys. 63 , 2479 (1975), DOI:10.1063/1.431689. [47] F. W einhold, “Metric geometry of equilibrium thermo dynamics. I I,” Scaling, homogeneit y , and generalized GibbsDuhem relations, ibid J. Chem. Phys 63 , 2484 ( 1975). [48] S. Bellucci, V. Chandra, B. N. Tiw ari, “On the Thermo dynamic Geometry of Hot QCD,” arXiv:0812.3792v1 [hep-th] , [Submitted for publication]. [49] A. Gilglio, “Router-based Congestion Con trol through control Theoretic Active Queue Managemen t,” Masters degree pro ject Sto c kholm, Sweden 2004. 11 [50] P . A. Ioannou and J. Sun, “Robust Adaptive Con trol,” r 1996 by pren tice Hall, Inc. [51] K. Hidak a, H. Ohmori and A. Sano, “Mo del Reference Adaptiv e Control Design F or Linear Time V arying System,” Pro c. of the 35 th conference on decision and control, Kob e, Japan, Dec 1996, pp: 3359-3361. 12
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment