Overlapping Community Detection Optimization and Nash Equilibrium
Community detection using both graphs and social networks is the focus of many algorithms. Recent methods aimed at optimizing the so-called modularity function proceed by maximizing relations within communities while minimizing inter-community relati…
Authors: Michel Crampes, Michel Plantie
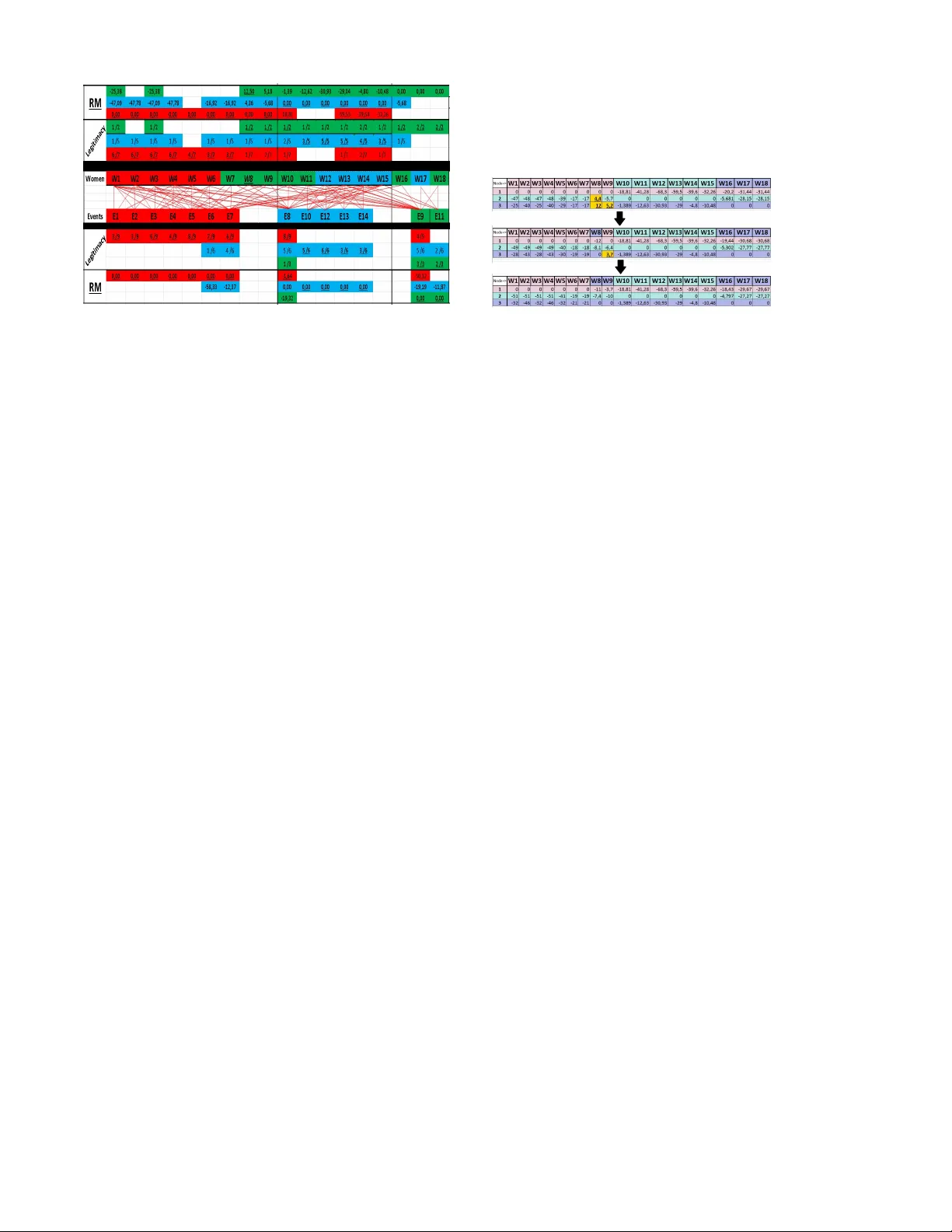
Overlapping Comm unity Detection Optimization and Nash Equilibrium [Ov erlapping Community Detection] Michel Crampes LGI2P Laboratory Ecole des Mines, P arc Georges Besse 30035, Nîmes, F r ance michel.crampes@mines-ales .fr Michel Plantié LGI2P Laboratory Ecole des Mines, P arc Georges Besse 30035, Nîmes, F r ance michel.plantie@mines-ales.fr ABSTRA CT Comm unity detection using both graphs and so cial netw orks is the focus of many algorithms. Recen t metho ds aimed at optimizing the so-called modularity function proceed by maximizing relations within communities while minimizing in ter-communit y relations. Ho wev er, giv en the NP-completeness of the problem, these algorithms are heuristics that do not guarantee an optim um. In this pap er, we in tro duce a new algorithm along with a function that takes an appro ximate solution and mo difies it in order to reac h an optim um. This reassignment function is considered a ’p otential function’ and b ecomes a necessary condition to asserting that the computed optimum is indeed a Nash Equilibrium. W e also use this function to simultane- ously sho w partitioning and o verlapping communities, tw o detection and visualization modes of great v alue in revealing in teresting fea tures of a so cial netw ork. Our approac h is suc- cessfully illustrated through sev eral exp erimen ts on either real unipartite, multipartite or directed graphs of medium and large-sized datasets. K eywords Comm unity detection, So cial net works, Nash Equilibrium 1. INTR ODUCTION With social net works b eing so widespread on the In ternet, comm unity detection in so cial graphs has recently become a ma jor field of researc h. Many algorithms hav e b een pro- posed (see several surveys on this topic in [27, 36, 28] and a more detailed survey in [10]). Most of these algorithms take unipartite graphs as inputs and produce partitio ned comm u- nities. In the real w orld how ev er, individuals are presen t in sev eral communities. Ov erlapping is a common character- istic. Recent w orks hav e fo cused on detecting ov erlapping comm unities, mainly on unipartite graphs. In a previous article w e fo cused on extracting ov erlapping comm unities Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. T o copy otherwise, to republish, to post on servers or to redistrib ute to lists, requires prior specific permission and/or a fee. KDD ’14 El Paso, T exas USA Copyright 20XX A CM X-XXXXX-XX-X/XX/XX ...$15.00. in bipartite graphs through the use of Galois Lattices [6]. In a more recent pap er, we prop osed a different metho d [7] that uses an y partitioning algorithm for unipartite graphs in order to process an y type of graph (i.e. Unipartite, Bipar- tite, Orien ted) and then extract partitioned and o verlapping comm unities. W e ha ve actually made use the so-called Lou- v ain Algorithm [4]. Applied to well-kno wn b enchmarks w e ha ve obtained results as go od or b etter than any other au- thor. More sp ecifically , we hav e b een able to represent b oth partitioned and ov erlapping communities. How ever, despite its efficiency , our metho d based on the Louv ain algorithm con tains some imp ortan t limitations, which w e would lik e to address in this pap er. Like any other heuristic, ours yields partitioned communities, in which the distribution of v er- tices is not guaran teed to b e a global mo dularity optimum. In particular, p oten tial ov erlapping clearly shows the lac k of an optim um. T o more closely appro ximate the optimum , we in tro duce a reassignment function that allows taking into accoun t the wishes of eac h vertex to c hange communities. This function is then complemen ted by a stability condi- tion, which is actually a Nash Equilibrium. The results are greatly enhanced. Conv ergence to a Nash Equilibrium pro- vides not only a wa y to reach a lo cal optimum within an ac- ceptable computational time, but also a p ow erful means for seman tic interpretation of agent assignmen t and reassign- men t to communi ties. Our pap er concludes with an open persp ective on these results. 2. ST A TE-OF-THE-AR T As stated ab o ve, several state-of-the-art assessmen ts hav e already addressed the communit y detection problem; these mainly fo cus on unipartite graph partitioning. The calcu- lations p erformed are based on maximizing a mathematical criterion, in most cases modularity (introduced by Newman [22]) in represen ting the maxim um n umber of connections within each commu nity and a minim um n umber of links with external communities. V arious metho ds ha ve b een de- v elop ed to iden tify the optim um, e.g. greedy algorithms [20, 25], spectral analyses [21], or a searc h for the most cen tric edges [22]. One of the most efficien t greedy algorithm for extracting partitioned communities from large (and p ossi- bly weigh ted) graphs is Louv ain [4]. In a v ery comprehen- siv e state-of-the-art rep ort [10] other new partitioned com- m unity detection methods are described. Sev eral authors ha ve since extended modularity to bipartite graphs, first of all by adapting the formulae [19, 34]. Barb er [1] ho wev er deriv ed a mo dularit y expression for bipartite graphs from Newman’s that was subsequently used by sev eral authors to apply classical metho ds, suc h as Sim ulated Annealing [13], spectral clustering [1], genetic algorithms [23], Lab el propa- gation [17], or sp ectral dic hotomic analysis[16]. Ov erlapping comm unity detection strategies from unipartite graphs are v ery often simply extensions of partitioned extraction meth- ods. Reference [26] uses k-clique p ercolation methods, while [8] uses a random march in a graph and [12] designs la- bel propagation algorithms. Some authors prop ose sp ecific methods: [35] extract o verlapping in partitioned commu- nities, [30] com bine the P ott’s spin interaction mo del with Sim ulated Annealing, [15] optimizes a lo cal statistic func- tion and [9] treats a dual problem inv olving a partitioning of weigh ted links. It is rare to find researc h work fo cus- ing on b oth bipartite graphs and ov erlapping communities. W e hav e iden tified some metho d extensions, like ov erlap- ping bi-clique extraction [33]. Other original metho ds use w ell-known results in Galois Lattices ([6] and [32]), though their algorithms and represen tations remain complex. In a recen t article [7], we demonstrated the possibility of unify- ing unipartite, bipartite and oriented graphs, in addition to extracting b oth ov erlapping and partitioned communities; the ov erlapping prop erties are computed using a simple si- m ultaneous membership function. W e decided to apply the w ell-known Louv ain Algorithm [4], which iteratively aggre- gates the graph vertices in order to maximize the modularity function. In the general case how eve r, this algorithm, lik e an y heuristic, merely pro duces an approximate result, i.e. the algorithm stops once mo dularity can increase no fur- ther. Moreo ver, our ov erlapping function shows that some v ertices ma y ha ve an incentiv e to belong to other comm u- nities and that such c hanges may increase or decrease the results already achiev ed, meaning that the present result is not stable. The research on stable communities has not been extensiv ely studied, as authors tend to b e satisfied with their own results on their o wn algorithms, with comparisons to other authors’ results. Y et the b ody of researc h on net- w ork stability from the p ersp ectiv e of ” game theory” is quite prolific and has provided n umerous scientific articles, e.g. [24]. According to this approach, attaining the stabilit y of n agen ts, all of whom choose their own strategies with the help of satisfaction functions, presumes that a Nash Equilibrium actually exists. When applied to communit y detection, the problem can b e stated as follo ws: find the conditions yield- ing a Nash Equilibrium such that no v ertex would wish to lea ve the comm unity where it has b een assigned. T o the best of our knowledge, Nash Equilibrium has seldom b een used to detect comm unities, though [29] applied it to uni- partite graphs. These authors used vertex connectivit y to reac h a Nash Equilibrium, yet without measuring the result- ing mo dularit y . [5] fo cused on unipartite graphs to extract o verlapping comm unities with Nash Equilibrium as the lone guiding ob jective. Y et the exp erimental results do not seem to relate to published material on this sub ject. In this arti- cle, we draw a distinction with these authors b y first seeking an approximate robust solution with the Louv ain algorithm and then p erforming reallocations in order to conv erge to- w ards a Nash Equilibrium. Moreov er, we are able to apply our approac h to all three types of graphs. 3. P AR TITIONED COMMUNITY DETECTION AND O VERLAP 3.1 Modularity W e hav e shown in [7] that detecting partitioned commu- nities in unip artite, bipartite or directed graphs may b e con- sidered as comm unity detection in u nipartite graphs. Conse- quen tly , we introduced definitions and prov ed all properties on unipartite graphs, before applying them to the unipar- tite and bipartite graphs in our exp erimen ts. The common consensus among authors in the comm unity detection dis- cipline is to reach an appro ximate result maximizing New- man’s modularity [21]. This form ula measures the quality of graph partition. Let’s define a unipartite graph G = ( N , E ) represen ted with its adjacency matrix A , the mo dularity Q of a graph partition is defined as: Q = 1 2 m X i,j A ij − k i k j 2 m δ ( c i , c j ) (1) where A ij is the weigh t of the link b et ween i and j , k i = P j A ij is the sum of weigh ts of edges attac hed to v ertex i , c i is the comm unity of i , the Kroneck er function δ ( u, v ) is equal to 1 if u = v and 0 elsewhere, and finally m = 1 / 2 P ij A ij . W e are only considering binary graphs herein, in which case w eights A ij ha ve just tw o v alues: 1 or 0, depending on whether the edge exists or not. W e can interpret this formula as follows: for all communities, mo dularit y is the w eighted sum of the differences betw een links inside the communit y (term A ij ) and the probability of these links (term k i k j 2 m whose numerator is the pro duct of margins corresp onding to cell i, j ). Applying this function with many t yp es of algo- rithms yields satisfactory results. F or example, it is p ossible to find comm unities of ad-ho c constructed graphs. F ortu- nato [10] how ever demonstrated that this function tends to merge small comm unities and, consequently , swallo ws small gran ularities. F or bipartite graphs (and directed graphs, whic h can be reduced to bipartite graphs, see [7]), other form ulations ha ve b een offered. In particular, Barb er’s for- m ulation [2] has won consensus among researchers: it is not v ery different from Newman’s. Nonetheless, we will still use Newman’s formulation regardless of the graph t yp e consid- ered in order to remain consisten t with our previous works published, in unifying the three types of graphs. 3.2 Bipartite graph partitioning This section will show how to transform a bipartite graph in to a unipartite graph, in order to apply all algorithms of other graph types, and then explain the consequences of this action. 3.2.1 T urning bipartite graphs into unipartite graphs In formal terms, a bipartite graph G = ( U, V , E ) is a graph G 0 = ( N , E ) where no de set N is the union of tw o indep en- den t sets U and V and moreo ver the edges only connect pairs of v ertices ( u, v ) where u belongs to U and v b elongs to V . N = U ∪ V , U ∩ V = ∅ , E ⊆ U × V . Let: r = | U | and s = | V | , then | N | = n = r + s The non-w eigh ted biadjacency matrix of a bipartite graph G = ( U, V , E ) is a r × s matrix B in which: B i,j = 1 if f ( u i , v j ) ∈ E and B i,j = 0 if f ( u i , v j ) / ∈ E . Let’s p oint out that the ro w margins in B represent the degrees of no des u i while the column margins represen t the degrees of no des v j . Conv ersely , in B t , the transp ose of B , ro w margins represen t the degrees of nodes v j and column margins represent the degrees of no des u i . Let’s now define the off-diagonal blo ck square matrix A 0 : A 0 = 0 r B B t 0 s where 0 r is an all zero square matrix of order r and 0 s is an all zero square matrix of order s . This symmetric matrix is the adjacency matrix of the unipartite graph G 0 where no des t yp es hav e not been dis- tinguished. It is p ossible to apply any algorithm to G 0 for the purp ose of extracting communities from unipartite graphs. A 0 is also the off-diagonal adjacency matrix of bi- partite graph G . Consequen tly the communities detected in G 0 are also detected in G . The question then is to determine the v alidity of this secondary result: what is the quality of partitioning for G when applying an unipartite graph par- titioning algorithm on G 0 ? Barb er [1] and Liu/Murata [17] also introduced the blo ck matrix as a means of detecting comm unities in bipartite graphs. W e notice b elo w how ever that these authors ha ve not tak en all consequences of this approac h into account. 3.2.2 Extending modularity to bipartite graphs Modularity is an indicator often used to measure the qual- it y of graph partitions [22]. First defined for unipartite graphs, several mo dularity v ariants hav e been prop osed for bipartite graph partitioning as well as for ov erlapping com- m unities. More recently , several authors introduced mod- ularit y into bipartite graphs using a probabilistic analogy with the mo dularity for unipartite graphs. Y et when apply- ing unipartite graph mo dularity optimization algorithms to bipartite graphs, another expression of probabilistic mo du- larit y emerges, as will b e presented hereafter. Let G = ( U, V , E ) be a bipartite graph with its biadja- cency matrix B and the unipartite graph G 0 with the ad- jacency off-diagonal blo ck matrix A 0 . Let’s also consider Newman’s mo dularit y [22] for this graph G 0 : it is a function Q of b oth matrix A 0 and the comm unities detected in G 0 : Q = 1 2 m X i,j A 0 ij − k i k j 2 m δ ( c i , c j ) (2) where A 0 ij represen ts the w eight of th e edge b et ween i and j , k i = P j A 0 ij is the sum of weigh ts for the edges attached to v ertex i , c i denotes the communit y to whic h v ertex i is assigned, the Kronec ker function δ ( u, v ) equals 1 if u = v and 0 otherwise and m = 1 / 2 P ij A 0 ij . Hereafter we only consider binary graphs and w eights are equal to 0 or 1. After sev eral transformations we sho w (for further details, see [7]) that this modularity can also be written using the biadjacency matrix B of the bipartite graph G = ( U, V , E ): Q B = 1 m X ij [ B ij − ( k i + k j ) 2 4 m ] δ ( c i , c j ) (3) where k i is the margin of row i in B , k j the margin of column j in B and m = P ij B ij = 1 2 × P ij A 0 ij = m in (2). Another in teresting form ulation to be introduced is as fol- lo ws ([7]): Q B = X c [ | e c | m –( ( d u | c + d v | c ) 2 × m ) 2 ] (4) where | e c | is the n umber of edges in comm unity c , and d w | c is the degree of no de w belonging to c . This mo dularity formulation is the same as Newman’s, y et with more detailed information: it explicitly shows that both sets of nodes are structurally asso ciated in the same comm unities. Since in the general case B is asymmetric, this definition th us c haracterizes modularity for bipa rtite graphs after their extension into unipartite graphs. It then b ecomes p ossible to apply any partitioning algorithm for unipartite graphs to matrix A 0 and obtain a result where b oth types of no des are bound in the same comm unities, except in the case of sin- gletons (i.e. no des without edges). This definition from uni- partite graph mo dularit y , in recognizing its ability to bind both types of nodes, has been compared in [7] with other authors’ mo dularity mo dels for bipartite graphs. 3.3 Partitioned Community Detection Among the numerous algorithms prop osed by researchers to extract partitioned comm unities, the Louv ain Algorithm [4] is remark able for its efficiency and quality of results; it uses a hierarchical metho d to build comm unities by finding at each step the mo dularity optim um for eac h vertex. At eac h step, communities from the previous steps are replaced b y a v ertex represen ting all its comp onents. Consequently , the graph is progressively reduced to reach a mo dularit y optim um. 3.4 Overlapping Community Detection and Analysis Sev eral approac hes exist to detect ov erlapping among com- m unities. In scientific corp ora dedicated to the detection of o verlapping comm unities, vertices are associated with sev- eral communities. Such is the case for example in [26] and [5]. In our case, we start by identifying partitioned commu- nities; then, an ov erlapping function is used to detect insta- bilities in communit y membership. W e are able to simulta- neously obtain partitioned comm unities and their ov erlap. Sev eral ov erlapping functions ma y b e applied; some only detect ov erlapping, while others like ours measure the ov er- lapping ratio. Our function, called ” legitimacy” , offers the adv antage of detailing for each v ertex its membership de- gree to each comm unit y . F or eac h v ertex u i , the mem b er- ship degree (or membership legitimacy) to the c communit y is measured by the n umber of edges related to communit y v ertices divided by the communit y size: L ( u i ∈ c ) = P j A ij δ ( c j ) |{ v ∈ c }| (5) This function ma y b e in terpreted as follo ws: the more a v ertex is attracted by a communit y , the higher its relative n umber of relations with this communit y , indep enden t of its size. This function is b oth intuitiv e and simple. F or exam- ple, for the SW benchmark presented in Section 6.2 we can observ e that c 1 con tains 7 ev ents, c 2 5 even ts and c 3 2 even ts. F or w 1 , we obtain a legitimacy v alue of 2 7 for c 1 , 1 5 for c 2 and 1 2 for c 3 . Despite its simplicity , this function shows that some vertices may b elong to sev eral communities and that these communities may be unstable with suboptimal mod- ularit y . The Louv ain algorithm, like an y other ” glutton” t yp e algorithm, yields an approximat e solution. T o increase o verall modularity , we ha ve in tro duced a new reassignment function, which will be the topic of the followi ng section. 4. REASSIGNMENT 4.1 Reassignment Modularity (RM) function T o define this Reassignment function, let’s introduce a v ariant of Equation 1. Let C i be a communit y , | e i | the num- ber of edges in C i and d C i the sum of degrees of eac h node in C i . Then Q = P i | e i | m − ( d C 1 ) 2 (2 m ) 2 . Reassigning a vertex w from C 1 to C 2 increases or decreases mo dularit y . This v ari- ation is defined as the Modularity Reassignmen t measure RM w : C 1 → C 2 = Q w ∈ C 2 - Q w ∈ C 1 where Q w ∈ C k is the mo dular- it y v alue for w ∈ C k and C 1 6 = C 2 . Let l w | i be the num b er of edges b etw een a vertex w and all other v ertices w 0 , suc h as w 0 ∈ C i , and let d w be the degree of w . It is no w con- sidered that vertex w b elonging to C 1 is remov ed from this comm unity and then reassigned to another communit y C 2 . Then Q w ∈ C 1 = [ 1 m | e 1 | − ( d C 1 ) 2 (2 m ) 2 + 1 m | e 2 | − ( ( d C 2 ) 2 (2 m ) 2 )] + K others where K others is the modularity con tribution of comm uni- ties other than C 1 and C 2 . K others does not c hange when reassigning a v ertex from C 1 to C 2 . Q w ∈ C 2 = [ 1 m ( | e 1 | − l w | 1 ) + 1 m ( | e 2 | + l w | 2 ) − ( ( d C 1 − d w ) 2 (2 m ) 2 + ( d C 2 + d w ) 2 (2 m ) 2 )] + K others then RM w : C 1 → C 2 = Q w ∈ C 2 - Q w ∈ C 1 = [ 1 m ( | e 1 | − l w | 1 ) + 1 m ( | e 2 | + l w | 2 ) − ( ( d C 1 − d w ) 2 (2 m ) 2 + ( d C 2 + d w ) 2 (2 m ) 2 )] − [ 1 m | e 1 | − ( d C 1 ) 2 (2 m ) 2 + 1 m | e 2 | − ( ( d C 2 ) 2 (2 m ) 2 )] and after simplifying: RM w : C 1 → C 2 = l w | 2 − l w | 1 m − [ d 2 w + d w ( d C 2 − d C 1 )] 2 m 2 (6) When applying Equation 6, it is p ossible to verify that if w e reassign w from C 1 to C 2 and then again from C 2 to C 1 , modularity does not change (this calculation may b e v erified in different w a ys) and R M w : C 1 → C 2 → C 1 = 0. Accordingly: RM w : C 1 → C 2 = − RM w : C 2 → C 1 . 4.2 Effects of Reassigning vertices Next, we assume that a first pass reassignment calcula- tion has b een p erformed, following which w , a graph vertex is mov ed from C 1 to C 2 , because of a p ositive reassignment v alue RM. L et z b e another g raph vertex: we can observ e the reassignmen t v alue for this vertex after moving w . The dif- ference in reassignmen t measure for vertex z from the previ- ous step to the present step is computed as follo ws: w e seek RM 1 z : C f rom → C to − RM 0 z : C f rom → C to where R M 0 z : C f rom → C to is the reassignment measure of z b efore the mo ve of w and RM 1 z : C f rom → C to its new v alue afterw ards. Dep ending on the v alues of C f r om and C to w e find the follo wing results: Let 4 R z = [ { w, z } − 1 (2 m ) d z d w ] 1 m , in whic h { w, z } represen ts the edge b etw een w and z . In the absence of an edge, this v alue is equal to zero. The follo wing table lists the v arious individually-computed rectifications of the z vertex reassignment v alue. C 3 and C 4 are comm unities different from C 1 and C 2 . to \ from C 1 C 2 C 3 C 4 C 1 0 -2 4 R z - 4 R z - 4 R z C 2 2 4 R z 0 4 R z 4 R z C 3 4 R z - 4 R z 0 0 C 4 4 R z - 4 R z 0 0 W e may infer the following interesting prop erties: ( RM 1 z : C 1 → C 2 − RM 0 z : C 1 → C 2 ) = ( RM 1 z : C 1 → C 3 − RM 0 z : C 1 → C 3 ) + ( RM 1 z : C 3 → C 2 − RM 0 z : C 3 → C 2 ) = 2 4 R z et ( RM 1 z : C 2 → C 1 − RM 0 z : C 2 → C 1 ) = ( RM 1 z : C 2 → C 3 − RM 0 z : C 2 → C 3 ) +( RM 1 z : C 3 → C 1 − RM 0 z : C 3 → C 1 ) = − 2 4 R z W e note that the matrix is antisymmetric, with RM 1 z : C f rom → C to − RM 0 z : C f rom → C to = - [ R M 1 z : C to → C f rom − RM 0 z : C to → C f rom ], whic h is com- patible with the reassignment prop erties in 4.1. This table allo ws simplifying reassignmen t computations in addition to pro viding a go od means for studying the semantic influence of reassignment. Without pursuing this discussion any fur- ther in the present article, suffice it to say that these prop- erties synthetically show that a vertex is inclined to either follo w its neighbor or leav e a communit y where a vertex has arriv ed to which it has no connection. 5. NASH EQUILIBRIUM This section will demonstrate that applying reassignmen t leads to a Nash Equilibrium (NE), i.e. a situation in whic h no vertex has an incentiv e to leav e the communit y where it has b een assigned. T o achiev e this goal, w e can interpret the vertex reassignmen t problem as a game theory problem. The n v ertices ma y indeed be considered as n agents seeking to optimize their b enefit by attempting sev eral strategies. Let’s define a game of a finite set of pla yers n , with each pla yer i having access to a finite set S i of strategies: S i = s i 1 , s i 2 ..., s i mi . A strategy is a mov e executed by a play er in order to derive some b enefit. F ormally a game G = ( S, f ) where S = S 1 × S 2 ... × S n is the set of strategy profiles. A strategy profile (or strategy v ector) s ∈ S is the combination of strategies of all play ers at a particular time of the game, with eac h play er applying just one strategy . Each strategy profile corresp onds to a gain function f i : S − → R for the play er i and f = ( f 1 , f 2 , ..., f i , ..., f n ). It is important to note that pla yer i ’s gain depends at a particular p oin t in time on the strategies adopted by the en tire set of play ers. A strategy profile s ∗ is a Nash Equilib- rium (NE) if no play er is able to unilaterally change his/her o wn strategy without causing a strategy change for one or more other play ers. F ormally sp eaking, a strategy profile is a NE if for all play ers i and for all alternative strategies s 0 i ∈ S i , s 0 i 6 = s ∗ i , f i ( s ∗ i , s ∗ − i ) ≥ f i ( s 0 i , s ∗ − i ) where s − i is a strategy vector once the agent i ’s strategy has been remov ed. Three questions arise: (i) what are the conditions where an NE actually exists, (ii) if an NE exists, how can it b e reached, (iii) can this NE b e reached in a p olynomial time (in fact, the Np Completeness problem is more complex). F or a more detailed presentati on, the interested reader is referred to (P apadimitriou, b o ok [24])). The existence of an NE remains a problem for any pure strategy game, in which play ers pro ceed deterministically . In con trast, a mixed strategy game is play ed using a probabilistic function with respect to the decision c hoices of all pla y ers for their next strategy . The Nash theorem asserts that in a game with n pla yers ( n b eing finite) using mixed strategies, at least one NE exists. This theorem is v alid for mixed strategies but may not b e directly applicable to pure strategies. It is p ossible how ev er to provide an answer to the existence of a NE and the p os- sibilit y of con vergence tow ards this equilibrium in the case of a finite pure strategy game, should we b e able to define a potential function that allows reac hing a global optimum by seeking local optima for all agents. Moreov er, if the search for a lo cal optimum can b e conducted in a p olynomial time, then the problem enters into the PLS Complete problem class ((Po lynomial Lo cal Search) (Ev a T ardos & T om W exler [24]). F or any finite game, an exact p otential function Φ as- sociates a real v alue Φ( s ) to each strategy vector s under the follo wing conditions: Φ( s 0 ) − Φ( s ) = f i ( s 0 ) − f i ( s ) (7) where s = ( s i , s − i ) and s 0 = ( s 0 i , s − i ) This function is in terpreted as follows: if play er i shifts unilaterally from strategy s i to strategy s 0 i with a gain of f i ( s 0 ) − f i ( s ) then the p oten tial function increase with the same v alue for all play ers; all play ers are then fav orable to i ’s c hange in strategy . With this p oten- tial function, the Nash Equilibrium definitely exists, and we ma y conv erge to it b y each pla yer searc hing for lo cal op- tima. In the comm unity detection case, we are in a pure strategy game where agen ts are the n vertices and strate- gies are the communities where these vertices are seeking to be attached. T o ensure con vergence to a Nash Equilibrium, i.e. a comm unit y partition scheme that satisfies all pla y- ers, we must build a p otential function Φ( s ). The function RM w : C 1 → C 2 whic h represen ts the exp ected gain for vertex w once it has been reassigned, takes in to accoun t the modular- it y gain of all comm unities and all vertices. In other words, Φ( s ) = f i ( s ). This choice of a lo cal gain ensures that the local vertex reassignmen t algorithm detailed in the previous section conv erges to wards a Nash Equilibrium. Since the RM computation is p olynomial, the con vergence algorithm to wards the Nash Equilibrium is PLS Complete. With this result now confirmed, let’s note that the NE may not b e unique and, furthermore, the NE reached is not necessarily the b est one. 6. EXPERIMENTS In [7], we hav e sho wn the p ossibility of analyzing unipar- tite, bipartite, and directed graphs indifferently , which has led us to conduct tw o types of exp erimen ts. On the one hand, we applied our reassignment algorithm to traditional unipartite graphs like ’Karate Club’ of ’Dolphins’ to com- pare our results with those of other authors. On the other hand, we applied our algorithm to communit y detection in bipartite graphs. 6.1 Unipartite Graphs 6.1.1 ’Karate Club’ benchmark Applying the Louv ain algorithm to the ’Karate’ graph from Zachary [37]], as display ed in Figure 1, outputs four comm unities. Our reassignmen t measure pro duces no instability since all RM v alues are negative. The computed modularity is higher than that produced by all other kno wn algorithms. In particular, it is muc h higher (0.470) than the one an- nounced by the authors using a lo cal approach to reac h a Nash Equilibrium, i.e. [29] and [5] which announce 3 com- m unities. Figure 1: ” ‘Karate Club” ’ graph with partitioned comm unities Figure 2: ” Karate Club” Nash Equilibrium Figure 3: Bipartite Graph W omen Ev ent s: Comm u- nities, mo dularity , legitimacy and RM measures 6.1.2 "Dolphins" benchmark With respect to the ’Bottlenose Dolphins’ graph, a so cial net work of dolphins living in Doubtful Sound (New Zealand) [18] (n umber of v ertices: 62, num b er of edges: 159), Louv ain produces 4 comm unities with a modularity equal to 0.48; our reassignmen t measure indicates 4 unstable vertice s. After reassigning these vertices and after reaching the associated Nash Equilibrium (see Figure 2), the modularity results rises to 0.51. Other authors ha ve found a low er modularity v alue, except for [29], whose results how ever could not b e v erified due to a lack of appropriate data. Without any further analysis, our approac h interestingly seems to improv e on the Louv ain metho d, with abov e all a p olynomial means for verifying stabilit y . Compared to other metho ds using Nash Equilibrium, w e hav e pro duced b etter results or, in some cases, equally go o d results (should these results b e v erifiable). 6.2 Bipartite Graphs 6.2.1 ’Southern W omen’ benchmark This b enchmark has b een studied by most authors inter- ested in c hecking their partitioning algorithm for bipartite graphs. The goal here is to partition, into v arious groups, 18 women who attended 14 social even ts according to their lev el of participation at these even ts. In his well-kno wn cross-sectional study , F reeman [11] compared results from 21 authors, most of whom identi fied tw o groups. R esults. In Figure 3, the bipartite graph is depicted as a bi-lay er graph in the middle with women at the top and ev ents b elow; moreov er, the edges b etw een women and even ts represen t w oman-eve nt participations. Three clusters with associated women and even ts hav e b een found and even tu- ally highlighted in red, blue and yello w coloring. This result is more accurate than the ma jority of results presented in [11]; only one author found three w omen communities. Be- y ond mere partitioning, Figure 3 presents ov erlapping com- m unities using tw o o verlapping functions, namely legitimacy and reassignmen t modularity (RM). Legit imacy and RM for w omen are placed just ab o ve women partitioning; for the studied ev ents , b oth are symmetrically sho wn below ev ent partitioning. As expected, reassignmen t in the same com- m unity pro duces a zero RM v alue. The best v alues for le- gitimacy and RM ha ve b een underscored. A positive v alue Figure 4: WE: Ac hieving Nash Equilibrium of RM indicates that the corresp onding vertex could hav e been a member of another communit y; this is the outcome of an early assignment during the first Louv ain phase for en tities with equal or nearly equal probabilities across sev- eral comm unities. It can be observed in [11] that woman 8’s comm unit y is also debated b y sev eral authors; our re- sults app ear to b e particularly p ertinen t in terms of b oth partitioning and ov erlapping. The fact that women and ev ents are correlated may b e considered to cause a bias, such as in the num b er of com- m unities. When comparing our results to those of other authors ho wev er, the merging of our blue and green comm u- nities pro duces their corresp onding second comm unity . In a trial designed to obtain a v arying num b er of communities in b oth sets, Suzuki [34] found a large num b er of singletons. These results were far from those presented in [11], while ours were compatible and more highly detailed. W e complete these results with both ov erlapping and Nash Equilibrium. Figure 4 sho ws ho w the Nash Equilibrium is reac hed by a three-step pro cess, with each step display ed as a horizon tal table. This outcome is more precise than the ma jority of re- sults presen ted in [11]. measures show with greater accuracy this tendency to prefer association with another comm unity . More sp ecifically , p ersons W8 and W9 are unstable. Af- ter reassignmen t, the three communities all become stable. Ov erall mo dularity rises from 0.309 to 0.325. It is interesting to note that the tw o reassigned vertices b ecome members of the third communit y , which is strengthened, while no other author ev en detected this communit y . In eac h table, the top row lists the vertex fig ures and their assigned communit y (a differen t color for each communit y). The first column on the left giv es the comm unity num b er. During the first phase, we applied the ’Louv ain’ algorithm. The num b ers in each cell indicate the RM v alue for eac h v ertex (column) if placed in a communit y (ro w). W e can observ e three unstable situations in the first horizontal ta- ble. During the se cond phase, as observed in the second hor- izon tal table, we applied our reassignment algorithm based on RM measures. The situation improv es and mo dularity increases. One unstable situation still remains. During the third phase, seen in the third horizon tal table, the situation has b ecome stable and Nash Equilibrium has b een reached: no one is willing to c hange comm unity (all RM v alues turn negativ e). 6.2.2 F acebook account This medium-sized exp eriment inv olv es the F acebo ok ac- coun t of a student, from which w e hav e extracted photos and asso ciated tags. The only impartial selection criterion w as the num b er of tagged photos asso ciated with the ac- coun t. The dataset includes 644 photos for 274 differen t tags. These tw o types of information form a bipartite bi- nary graph. A photo is considered to b e connected to a tag (generally a p erson) if the photo has been tagged with this person’s name. Photos are not linked nor are the p ersons related. After cleaning the da taset, w e applied to it our comm unity detection metho d in order to obtain partition and o v erlap- ping information. W e deleted the tags that w ere not persons (lik e ’landscap e’). W e initially obtained ov er 300 comm uni- ties ha ving one photo and one unique tag. These comm u- nities were the result of a single individual with just one associated photo and just one tag. W e ignored these com- m unities, but they may still b e w orthwhile for the o wner. The other comm unities (i.e. with sev eral p ersons) are pre- sen ted in Figure 5, where the individuals are display ed as columns and the communities as ro ws. After a first pass with Louv ain, 16 communities of more than 2 individuals w ere extracted: they ov erlapp ed only sparsely , which ma y be easily understoo d when considering that photos assume a ph ysical presence of individuals at a particular time and place. They effectively exp ose several life p erio ds of the ac- coun t owner. W e identified tw o types of individuals: those link ed at a point in time during the o wner’s life (e.g. a class- room) were gathered in one communit y; and those (family mem b ers or close friends) presen t sev eral times in his/her life ma y appear in sev eral comm unities. The first commu- nit y (blue) has the particular feature of containi ng an indi- vidual (first column on the left) included in all communi ties except 15 and 16. This p erson is the owner. Most photos for this comm unit y include the owner and others who are not presen t in other communities, which let’s sa y then consti- tutes the owner’s characteri stic communit y . If we were only considering partitioning, then the o wner w ould b e a mem- ber of the one communit y in which he is isolated from other groups of friends in other communities. Thanks to ov erlap- ping information, w e are able to see that the o wner is also presen t in almost all communities. This exp eriment shows that for the studied dataset, if we w ere only to consider partitioning information, the results w ould present certain inconsistencies, like the o wner’s iso- lation in a particular communit y (other inconsistencies will not b e discussed due to length limitations of our pap er). Con versely , thanks to ov erlapping information and the asso- ciation of b oth sets of individuals and prop erties in commu- nities, a finer analysis could be performed. The RM measure only indicates one unstable p erson out of the 250, which un- derscores the prop er initial set-up of communities found by Louv ain. The RM measure applied to photos results in 15 photos being unstable in their res p ective communities found b y the Louv ain partitioning set-up, whic h sug gests that rig ht from the b eginning, the dataset has very few amb iguities. On this dataset, Nash ffEquili brium is reached in 18 steps. The mo dularit y at the b eginning just after Louv ain is equal to 0.7431, and mo dularity at Nash Equilibrium amounts to 0.7491. This increase is quite noticeable. Since the F aceb ook matrix is quite large, it is not v ery useful to visualize each step. This visualization problem will b e addressed in the Figure 5: F aceb o ok accoun t: Communities and o ver- lapping information Figure 6: New F aceb o ok Account: Before Nash Equilibrium next section. On a new F aceb o ok accoun t quite of the same size, w e computed the o verlapping information from Louv ain Algo- rithm and then the Nash Equilibrium. W e show in Figures 6 and 7 The situation b efore equilibrium (right after Lou- v ain Algorithm) and after reac hing Nash Equilibrium. The first line on eac h figure displa ys the partition situation with separate colors (i.e. each person is represented as a colomn and eac h color corresp onds to a communit y). Nash equilibrium is reached after 1250 steps in less than one second. W e can see that communities after Nash Equi- librium are bigger and less scattered among p ersons. There are 62 comm unities among whic h only 10 communities are of relative big size. A lot of singletons are still present . There are in the dataset a lot of photos with only one per- son. Moreov er there are less o v erlapping potential situations after Equilibrium show n with legitimacy measure, meaning that comm unities are more stables and persons are more confortable in their comm unity . The situation after Nash Equilibrium is m uch b etter for Figure 7: New F aceb o ok Account: After Nash Equilibrium the whole graph and at the same time for eac h person. Mo d- ularit y increases a lot from Louv ain to Nash Equilibrium from a v ery low v alue showing some scattered communit y distribution to a v ery go o d v alue of 0.4748. This experiment may b e extend ed to generate results with industrial application. More sp ecifically , this method may be used to automatically build photo albums and spread personally adapted albums to targeted individuals or to ac- complish marketing goals or for personal dissemination. 6.2.3 Known benchmarks and lar ge graphs Our recent experiments ha ve been conducted on sev eral large graphs. On a unipartite graph with ov er 10,600 vertices cited in [5], Nash Equilibrium is reached after 80 iterations, with just a few seconds of computational time. It is not common to find large bipartite graphs in the scien- tific literature. W e ev aluated our algorithms using medium- sized bipartite benchmarks found in [1]. One of them is a dataset describing cross-shareholdings (in order to av oid tak eov er by new shareholders) in Scotland at the b eginning of the 20th century . The data describ e 108 Scottish compa- nies b et ween 1904 and 1905, display ed b y each compan y’s t yp e of activit y , capital and shareholding group. The dataset has been reduced to Board Members holding the righ t to v ote on multiple boards. Barber found around (sic) 20 com- m unities, whereas our num b er w as 15 with very in terest- ing ov erlapping information among these communities. The global modularity after reassignmen t is equal to 0.71, while Barber found a lo wer v alue of 0.57. T o ev aluate the scalabilit y of our metho d, we tested a m uch broader dataset of co-author relationships on scien- tific pap ers in order to extract scientific communities. The data were extracted from the well-kno wn ” Pubmed” library (h ttp://www.ncbi.nlm.nih.go v/pubmed) of scientific pap ers in the biomedical field. The dataset contains 30,000 indi- viduals and ov er 85,000 scien tific pap ers. W e extracted 184 comm unities of 670 members on av erage in less than 3 sec- onds with Louv ain. The reassignmen t was then performed on more than 80,000 unstable v ertices, demonstrating that the intermediary result from Louv ain is quite unstable. The computing time of one hour and a half still requires some optimization. Computations on large-scale data may b e used to achiev e industrial or administrative ob jectives. Comm unities form a w ork able knowledge base to pursue p ersonal dissemination, targeted actions, dissemination-related savings, department restructuring according to communit y membership, etc. 7. DISCUSSION AND UNRESOL VED PROBLEMS Regarding communit y detection problem in So cial Net- w orks, after applying metho ds inspired from data analysis, specific algorithms hav e recen tly app eared and prov e to be v ery efficien t in terms of computation time and when con- sidering the results, although the solutions given are sub op- timal. Several criteria for defining a go o d graph partition ha ve b een proposed, in particular modularity based on a sound probabilistic basis. More recen tly , entrop y and Nash Equilibrium hav e yielded new and complementary results. Some issues remain unresolv ed. It is obviously still p os- sible to propose new heuristics that offer better results ac- cording to preexisting criteria (mo dularit y , entrop y , Nash Equilibrium) or that may b e inv ented. On the other hand, man y related difficulties need to b e considered. V isualization. The most ob vious and difficult problem seems to b e visu- alization. Visualizing results is a prerequisite to pro viding in terpretation. Displa ying a unipartite graph partition is quite simple, as can be observed for the ” k arate” dataset in Figure 1. On larger graphs, if the num ber of communiti es re- mains rather low, the problem can still b e solved, like in [4], where the tw o main linguistic communities are prominen tly displa yed, but the other communities with fewer linguistic properties are harder to disting uish. Regarding ov erlapping, visualization raises the challenging problem of hypergraph planarit y , where solutions offering a clear visualization are difficult to fi nd. F or three comm unities, we may use V enn di- agrams [14] for an effective visualization scheme, but with a higher num b er of comm unities V enn diagrams b ecome very a wkward to read. F or this reason, w e rely upon a matrix-like represen tation in this pap er, though it does not displa y the initial graph form. When comm unit y ov erlapping needs to be shown on bipartite graphs, the loss of representation is ev en greater. F or example, for F aceb ook datasets, we must narro w the displ ay to just one type of v ertex for the columns and communities for the rows. The other t yp e of vertices m ust b e display ed on another vertex-comm unit y matrix. Constraints. In many cases, w e are seeking to extract comm unities in whic h some constraints may b e added. One such constraint has already b een discussed in the data analysis: the pre- defined num b er of communit ies. It then b ecomes p ossible to return to traditional metho ds like KNN or K-means that do not require modularity . With mo dularit y , we may use a reassignmen t algorithm lik e the one presented in our pap er. Un til now how ever, we are not aw are of any articles that study communit y restructuring, i.e. given an optimal detec- tion and assignment, proceeding by eliminating or adding one or more communities. It is then essential to find a new optimal assignment on the new structure that takes in to ac- coun t the previous situation (if this previous situation is not tak en into accoun t, it is easier to consider the problem from the b eginning and reassign every vertex). Other problems are also of great interest. W e ha ve already discussed in troducing another quan titative criteria like en- trop y or Nash Equilibrium, but more complex constrain ts ma y arise. F or example, perhaps an equal n umber of in- dividuals are sought for each comm unit y (let’s recall here that individuals are related and the problem is not limited to dividing the population in to equal parts; we must also op- timize mo dularit y or any other similar criteria). Other con- strain ts ma y be considered, lik e banning tw o persons from mem b ership in the same comm unity . This problem has been extensiv ely addressed in its simplest form, i.e. graph color- ing. It tak es on an additional dimension here b ecause w e are also seeking to optimize other criteria. Let’s note that some problems hav e already been studied within the hypergraph domain [3]. Man y other constraints are also p ossible. Let’s mention in particular communit y detection with complementary in- dividuals in bipartite graphs. Examples would include ob- taining a unique property profile distribution in one or more comm unities or else an ev en distribution among communi- ties. A simple example of this situation is a rugby team composed of play ers with complementary skills for the game. This same situation may b e observed for a pro ject team within a compan y . Evolution. Comm unity evolution is the sub ject of a quite extensive bo dy of researc h, e.g. [31]. This field is esp ecially in ter- esting since it highligh ts so cial or ecological c hanges. The sub ject is even more appealing if we take into accoun t the temporal evolution of a net work. It is easy to understand the imp ortance of some topics related to the p ossible causes of net work and communit y evolution. F or example, what is the exp ected time evolution for net works like F acebo ok or Twitter; what are the evolution scenarios dependent on new service offerings? This issue may b e extended to the political arena when considering electorate communit y par- titioning, whic h ma y depend on voting in tention ov erlapping or netw orks influen cing voters. In this case, game theory a nd Nash Equilibrium may still lead to new av en ues if we design less consensual p otential functions than those prop osed in Section 5. 8. CONCLUSION AND PERPECTIVES W e hav e applied a comm unity detection metho d for all t yp es of graphs (unipartite, bipartite and directed). Our initial contribution was to detect and display ov erlaps. The second contribution was to detect instabilities pro duced by the detection algorithms in spite of their quality . T o iden- tify a stable solution, we designed a reassignmen t function and sho w ed that this solution may lead to a Nash Equi- librium in a p olynomial time. More generally , almost all comm unity detection metho ds pro duce unstable mem b er- ship situations. Our contribut ion allows complemen ting any comm unity detection algorithm in order to find a stable equi- librium with optimal mo dularity in a p olynomial time. It is important to notice the ’so cial’ feature of all vertices, which com bine their own in terest with the collectiv e goals. This point will be further dev eloped in our subsequen t w ork. Our future research will enhance the reassignmen t methods ex- posed herein. More specifically , one limitation of the p resent method is the fact that it takes into account the n umber of comm unities found by the initial partitioning algorithm. W e will determine ho w to eliminate or add communities. The focus will then b e on studying how adding or deleting p oli- cies can give rise to unstable or unsatisfactory situations. Generally sp eaking, while creating initial graphs and then detecting communities hav e b een widely studied, only a few con tributions hav e b een pro vided on the application of ex- ternal constrain ts and on adaption dynamics within com- m unities. These models would b e suitable for problems lik e adding or deleting pro duction units, services, etc. In realit y , graphs are often multip artite, whic h is why our approac h mixes unipartite and bipartite graphs. W e should also con- sider more selfish p otential functions op erating on less al- truistic agen ts. 9. REFERENCES [1] M. Barb er. Mo dularity and communit y detection in bipartite netw orks. Physic al Revi ew E , 76(6):1–9, 2007. [2] M. J. Barb er and J. W. Clark. Detecting netw ork comm unities by propagating lab els under constrain ts. Physic al R eview E - Statistic al, Nonline ar and Soft Matter Physics , 80(2 Pt 2):026129, 2009. [3] C. Berge. Hyp ergraphs, Combinatorics of finite sets. North-Hol land Mathematic a Libr ary, Elsevier, ISBN 0-444-87489-5 , 1989. [4] V. D. Blondel, J.-L. Guillaume, R. Lambiotte, and E. Lefebvre. F ast unfolding of communities in large net works. Journal of Statistic al Me chanics: The ory and Exper iment , 2008(10):P10008, Oct. 2008. [5] W. Chen, Z. Liu, X. Sun, and Y. W ang. Comm unity detection in social netw orks through communit y formation games. In Pr o c ee dings of the Twenty-Se c ond international joint c onfer enc e on Artific ial Intel ligenc e - V ol. Thr e e , IJCAI’11, pages 2576–2581. AAAI Press, 2011. [6] M. Cramp es and M. Plan ti´ e. D´ etection de comm unaut´ es dans les graphes bipartis. In IC 2012 Ing´ enierie des c onnaissanc e , 2012. [7] M. Cramp es and M. Plan ti´ e. A unified commun ity detection, visualization and analysis metho d. In A dvanc e d Complex Systems, World Scientific Publishing, Imp erial Col le ge Pr ess , 2013. [8] G. B. Davis and K. M. Carley . Clearing the FOG: F uzzy , ov erlapping groups for so cial netw orks. So cial Networks , 30(3):201–212, 2008. [9] T. S. Ev ans and R. Lambiotte. Line Graphs, Link P artitions and Overlapping Communities. Physic al R eview E , 80(1):9, 2009. [10] S. F ortunato. Communit y detection in graphs. Physics R ep orts , 486(3-5):103, June 2009. [11] L. C. F reeman. Finding so cial groups: A meta-analysis of the southern women data. In Dynamic So cial Network Mod eling and Analys is , pages 39—-97. National Academies Press, 2003. [12] S. Gregory . Finding ov erlapping communities in net works by lab el propagation. New Journal of Physics , 12(10):103018, 2009. [13] R. Guimer` a, M. Sales-P ardo, and L. Amaral. Mo dule iden tification in bipartite and directed netw orks. Physic al R eview E , 76(3), Sept. 2007. [14] M. Hazewink el. V enn diagram. Encyclop e dia of Mathematics, Springer , 2001. [15] A. Lancic hinetti, S. F ortunato, and J. Kert ´ esz. Detecting the o verlapping and hierarchical communit y structure in complex net works. New Journal of Physics , 11(3):033015, Mar. 2009. [16] E. A. Leich t and M. E. J. Newman. Communit y structure in directed net works. Physic al R eview L etters , 100(11):118703, 2007. [17] Liu Xin and Murata Tsuyo shi. An Efficient Algorithm for Optimizing Bipartite Mo dularity in Bipartite Net works. Journal of A dvanc e d Computational Intel ligenc e and Intel ligent Informatics , 14(4):408–415, 2010. [18] D. Lusseau, K. Schneid er, O. J. Boisseau, P . Haase, E. Slooten, and S. M. Dawson. The b ottlenose dolphin comm unity of Doubtful Sound features a large proportion of long-lasting asso ciations. Behavior al Ec olo gy and So ciobiolo gy , 54(4):396–405, 2003. [19] T. Murata. Detecting comm unities from tripartite net works. Pr o c e e dings 19th int c onfer enc e on World Wide Web , 1:0–1, 2010. [20] M. Newman. F ast algorithm for detecting communit y structure in net works. Physic al Rev iew E , 69(6), June 2004. [21] M. Newman. Finding comm unity structure in net works using the eigenv ectors of matrices. Physic al R eview E - Statistic al, Nonline ar and Soft Matter Physics , 74(3 Pt 2):036104, 2006. [22] M. Newman and M. Girv an. Finding and ev aluating comm unity structure in netw orks. Physic al R eview E , 69(2), F eb. 2004. [23] V. Nicosia, G. Mangioni, V. Carc hiolo, and M. Malgeri. Extending the definition of modularity to directed graphs with o verlapping communities . Journal of Statistic al Me chanics: The ory and Exp eriment , 2009(03):P03024, Mar. 2009. [24] N. Nisan, T. Roughgarden, E. T ardos, and V. V. V azirani. [BOOK] Algorithmic game the ory . Cam bridde Universit y Press., 2007. [25] A. Noac k and R. Rotta. Multi-level algorithms for modularity clustering. Pr o c e e dings of the 8th International Symp osium on Exp erimental Algorithms , page 12, Dec. 2009. [26] G. Palla , I. Derenyi, I. F ark as, and T. Vicsek. Unco vering the ov erlapping communit y structure of complex net works in nature and so ciety. Natur e , 435(7043):1–10, 2005. [27] S. Pap adop oulos, Y. Kompatsiaris, A. V ak ali, and P . Spyridonos. Communit y detection in Social Media. Data Mining and Know le dge Disc overy , 1(June):1–40, 2011. [28] M. A. Porter, J.-P . Onnela, and P . J. Mucha. Comm unities in Netw orks, 2009. [29] R Naray anam and Y Narahari. A game theory inspired decen tralized lo cal information based algorithm for comm unity detection in so cial graphs . In ICPR 21st International Confer enc e on Pattern R e c o gnition , Vienna, 2012. [30] J. Reich ardt and S. Bornholdt. Partitioning and modularity of graphs with arbitrary degree distribution. Physic al R eview E - Statistica l, Nonline ar and Soft Matter Physics , 76(1 Pt 2):015102, 2006. [31] C. Roth. Co´ ev olution des auteurs et des concepts dans les r´ eseaux ´ epist´ emiques : le cas de la communaut ´ e ” zebrafish ” . R evue F r an¸ c aise de So ciolo gie , 49(3):523–553, 2008. [32] C. Roth, S. Obiedko y , and D. G. Kourie. On succinct represen tation of knowledge communit y taxonomies with formal concept analysis. International Journal of F oundations of Computer Scienc e , 19(2):383, 2008. [33] Sune Lehmann,Martin Sch wartz,Lars Kai Hansen. Biclique comm unities. Physic al r eview. E, Statistic al, nonline ar, and soft matter physics , 78(1 Pt 2), 2008. [34] K. Suzuki and K. W akita. Extracting Multi-facet Comm unity Structure from Bipartite Netw orks. 2009 International Confer enc e on Computational Scienc e and Engineer ing , 4:312–319, 2009. [35] Z. W u, Y. Lin, H. W an, S. Tian, and K. Hu. Efficient o verlapping communit y detection in huge real-world net works. Physic a A: Statistic al Me chanics and its Applic ations , 391(7):2475 – 2490, 2012. [36] B. Y ang, D. Liu, J. Liu, and B. F urh t. Disc overing c ommunities fr om Soci al Networks: Metho dolo gies and Applic ations . Springer US, Boston, MA, 2010. [37] W. W. Zachary . An information flow mo del for conflict and fission in small groups. Journal of Anth r op olo gic al R ese ar ch , 33(4):452–473, 1977.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment