Stabbing simplices by points and flats
The following result was proved by Barany in 1982: For every d >= 1 there exists c_d > 0 such that for every n-point set S in R^d there is a point p in R^d contained in at least c_d n^{d+1} - O(n^d) of the simplices spanned by S. We investigate the…
Authors: Boris Bukh, Jiv{r}i Matouv{s}ek, Gabriel Nivasch
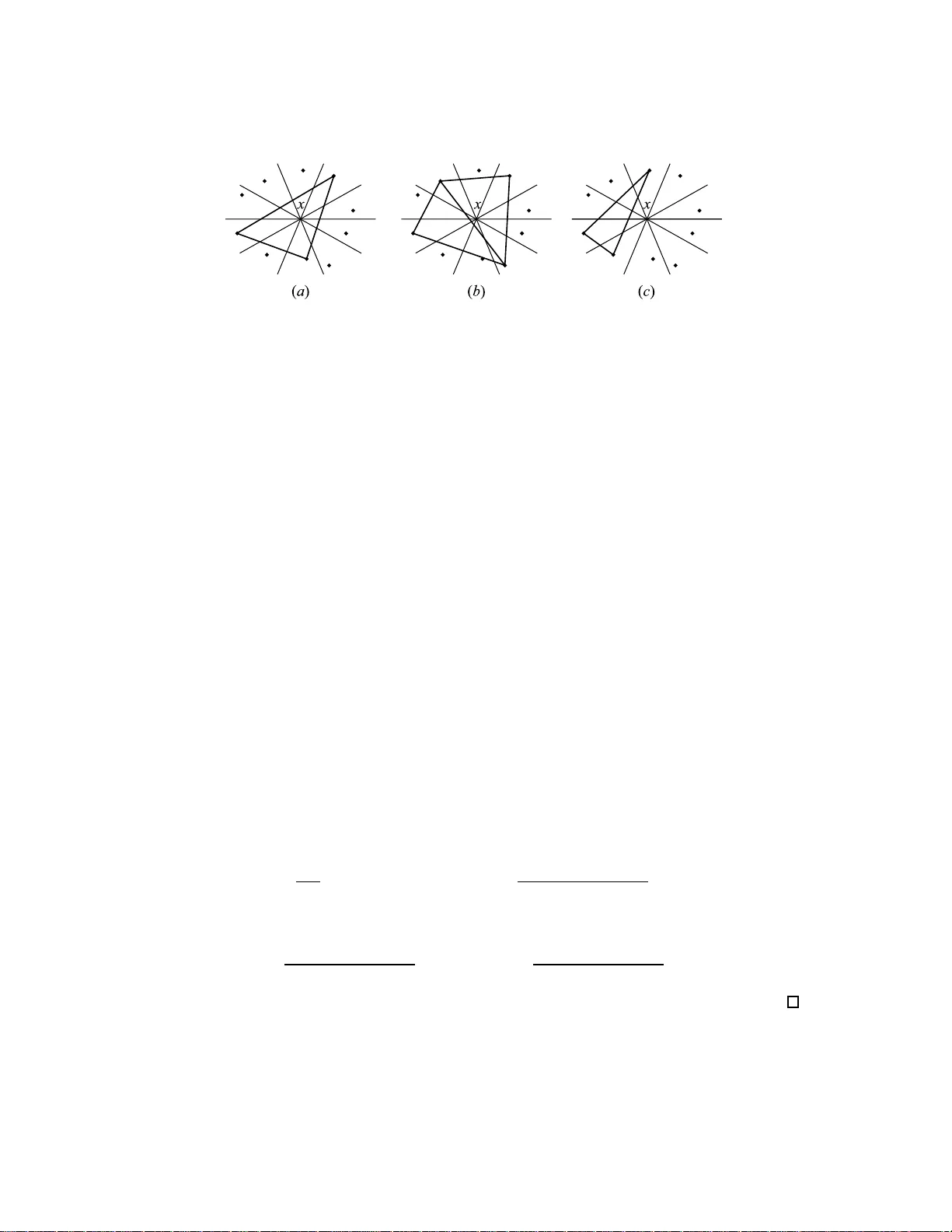
Stabbing simplices b y p oin ts and flats Boris Bukh ∗ Department of Mathematics Fine Hall, W ashington R d. Princeton, NJ 08544 United States Ji ˇ r ´ ı Ma tou ˇ sek † Department of Applied Mathematics and Institute of Theoretical Computer Science (ITI) Charles Universi ty , Malostransk ´ e n´ am. 25 118 00 Praha 1, Czech R epublic Gabriel Niv asch ‡ Bla vatnik School of Computer Science T el Aviv Universit y T el Av iv 69978, Israel Abstract The following result was pr ov ed by B´ ar´ any in 1 982: F or every d ≥ 1 there e x ists c d > 0 suc h that for ev ery n -point set S in R d there is a point p ∈ R d contained in at le a st c d n d +1 − O ( n d ) of the d -dimensional simplices spanned by S . W e in vestigate the largest po ssible v alue of c d . It was known that c d ≤ 1 / (2 d ( d + 1)!) (this estimate actually ho lds for every p o int set S ). W e construct sets showing that c d ≤ ( d + 1 ) − ( d +1) , and w e conjecture this estimate to be tight. The b est known low er bo und, due to W agner, is c d ≥ γ d := ( d 2 + 1) / (( d + 1)!( d + 1) d +1 ); in his method, p can b e c hos en as an y centerpoint of S . W e construct n -p oint sets with a cent erp oint that is co n tained in no more than γ d n d +1 + O ( n d ) simplices spanned by S , thus showing that the appr oach using a n arbitrary centerpoint cannot b e further improv ed. W e als o pro ve that for every n -p oint set S ⊂ R d there exists a ( d − 2)-flat that stabs at least c d,d − 2 n 3 − O ( n 2 ) of the triangles spanned by S , with c d,d − 2 ≥ 1 24 (1 − 1 / (2 d − 1) 2 ). T o this end, we establish an equipartition r esult of independent in terest (generalizing planar results of Buc k and Buc k a nd of Ceder): Every mass distribution in R d can b e divided into 4 d − 2 equal parts b y 2 d − 1 hyperplanes in tersecting in a common ( d − 2)-flat. 1 In tro duction Let S b e an n -p oin t set in R d in general p osition (no d + 1 p oin ts lying o n a common h yp erplane). The p oin ts of S span n d +1 distinct d - dimensional simp lices. The follo wing in teresting and useful result in discrete geometry (ca lled th e First Sele ction L e mma in [Mat02]), sho ws that at least a fixed fr action of these simplic es ha v e a p oin t in co mmon: ∗ bbukh@math .princeton .edu . Part of th is work was carried out at T el Aviv Un ivers ity . † matousek@k am.mff.cun i.cz . ‡ gabriel.ni vasch@cs.t au.ac.il . W ork wa s supp orted b y ISF Grant 15 5/05 and b y the Hermann Minko wski–MINER V A Center for Geometry at T el Av iv Un ivers ity . 1 Theorem 1.1 (B´ ar´ an y [B´ a r82]) . F or every n -p oint set S in R d in gener al p osition ther e exists a p oint p ∈ R d that is c ontaine d in at le ast c d n d +1 − O ( n d ) simp lic es sp anne d by S , wher e c d is a p ositive c onstant dep ending only on d (and the implicit c onstant in the O ( ) notation may also dep end on d ). In this paper w e inv estigate the v alue of c d . More precisely , from no w on, let c d denote the su prem um of the num b ers suc h that the statemen t of Theorem 1.1 holds for all finite sets S in R d . Lo wer b ounds. B´ ar´ an y’s pro of yiel ds c d ≥ 1 d !( d + 1) d +1 . W agner [W ag03] impr o ved this b ound b y roughly a factor of d , to c d ≥ d 2 + 1 ( d + 1)!( d + 1) d +1 . (1) F or the sp ecial case d = 2, Boros and F ¨ uredi [BF84] ac hiev ed the b etter lo w er b ound of c 2 = 1 / 27 (also s ee Bukh [Buk06] for a simpler pro of of this planar b ound ). Upp er b ounds. The follo wing result was p r o ved b y K´ arteszi [K´ ar55] for d = 2 (also see Moon [Moo68 , p. 7 ] and Boros and F¨ uredi [BF7 7, BF84]) and by B´ ar´ any [B´ ar82] for general d : Theorem 1.2. If S is any n -p oint set in gener al p osition in R d , then no p oint p ∈ R d is c ontaine d in mor e than 1 2 d ( d + 1)! n d +1 + O ( n d ) d -simplic es sp anne d by S . It follo ws without difficulty f rom a r esult of W endel (repro duced as Lemma 3.1 b e- lo w) that this b ound is asymptotically attained with high p robabilit y by p oin ts c hosen uniformly at random from the unit sphere. Alternativ ely , as w as kin dly p oint ed out to us by Uli W agner, the tigh tness also follo ws by considering the Gale transform of the p olar of a cyclic p olytop e; see, e.g., W elzl [W el01 ] for the relev an t bac kground. B´ ar´ an y’s b ound implies that c d ≤ 1 2 d ( d + 1)! , whic h, to our kno w ledge, w as the b est kno wn upp er boun d on c d for all d ≥ 3. F or d = 2, Boros and F ¨ uredi [BF84] claimed the u pp er b ound c 2 ≤ 1 / 27 (whic h w ould b e tigh t), but it turns out that the construction in their p ap er give s only c 2 ≤ 1 / 27+ 1 / 729 (see App endix A of this pap er). Our fi rst r esult is an imp ro ved u pp er b ound for c d for every d (and the first “non- trivial” one, in the sense that it refers to a sp ecific construction): 2 Theorem 1.3 . F or every fixe d d ≥ 2 and every n ther e exists an n -p oint set S ⊂ R d such that no p oint p ∈ R d is c ontaine d in mor e than ( n/ ( d + 1)) d +1 + O ( n d ) d -simplic es sp anne d by S . Thus, c d ≤ ( d + 1) − ( d +1) . (2) Mor e over, such an S c an b e chosen in c onvex p osition. In particular, the planar b ound of c 2 = 1 / 27 is tigh t, after all. 1.1 The First Selection Lemma and centerpoin ts If S is an n -p oin t set in R d and p ∈ R d , w e sa y that p lies at depth m with r esp e ct to S if ev ery halfspace that con tains p co n tains at least m p oin ts of S . A classical result of Rado [Ra d47] state s that there alw a ys exists a p oin t at depth n/ ( d + 1). Suc h a p oin t is called a c enterp oint . W agner pro v ed the b ound (1) b y sho wing the follo wing: Theorem 1.4 ([W ag03]) . If S is an n -p oint set in R d and p ∈ R d is a p oint at depth αn with r esp e ct to S , then p is c ontaine d in at le ast ( d + 1) α d − 2 dα d +1 n d +1 ( d + 1)! − O ( n d ) d -simplic es sp anne d by S . 1 This, together with Rado’s Cent erp oint T heorem, immediately implies (1). In this pap er w e sho w that Theorem 1.4 cannot b e impro ved: Theorem 1.5. F or ev e ry α , 0 < α ≤ 1 / 2 , and ev e ry n , ther e exists an n -p oint set S in R d such that the origin is at depth αn with r esp e ct to S but is c ontaine d in only ( d + 1) α d − 2 dα d +1 n d +1 ( d + 1)! + O ( n d ) d -simplic es sp anne d by S . Th us, the approac h of taking an arbitrary cen terp oint cannot yield an y lo wer b oun d b etter than (1) for the First Selection Lemma. 1.2 Stabbing ( d − k ) -simplices b y k -flats The First S electio n Lemma can b e generalized as follo ws: If S is an n -p oin t set in R d and k is an integ er, 0 ≤ k < d , then there exists a k -flat that inte rsects at least c d,k n d − k + 1 − O ( n d − k ) of th e ( d − k )-simplices spanned by S , for some p ositiv e constan ts c d,k that dep end only on d and k . (By a k -flat we m ean a k -dimensional affine s u bspace of R d .) 1 This is obtained by setting k = 0 in the lo wer bound for f k ( µ, o ) in the proof of Theorem 4.32 in [W ag03]. 3 The problem is t o determine the maxim um v alues of the constants c d,k . T rivially w e ha v e c d,k ≥ c d − k : Simply p ro ject S into an arbitrary generic sub space of dimension d − k , and then apply the First Selection Lemma. Here w e derive a non trivial lo we r b ound for the case k = d − 2 (this is the only case for whic h w e could obtain goo d lo wer b oun ds): Theorem 1.6. If S is a n -p oint set in R d , then ther e is a ( d − 2) -flat ℓ that interse cts at le ast 1 24 (1 − 1 / (2 d − 1) 2 ) n 3 − O ( n 2 ) triangles sp anne d by S . Thus, c d,d − 2 ≥ 1 24 1 − 1 (2 d − 1) 2 . (3) F or d = 2 this is just the planar v ersion of First Selection Lemma with the optimal constan t of 1 / 27. And as d increases, the rig h t-hand-side of (3) i ncreases strict ly with d , approac h ing 1 / 24 as d tends to infinit y . Ind eed, it is imp ossible to stab more than n 3 / 24 triangles for an y d , since then pro jecting in to a plane p erp endicular to ℓ would result in a p oint stabb ing more than n 3 / 24 triangles in the plane, con tradicting Theorem 1.2. Theorem 1.6 is a consequence of the follo wing equipartition resu lt, whic h is in teresting in its o w n righ t. Gi v en an inte ger m ≥ 2 , define an m -fan as a set of m h yp erplanes in R d that pass through a common ( d − 2)-flat. Then: Theorem 1.7. F or every pr ob ability me asur e µ on R d that is absolutely c ontinuous with r e sp e c t to the L eb esgue me asur e, th er e exists a (2 d − 1) -fan that divides µ into 4 d − 2 e qual p arts. F or d = 2 this theorem sp ecialize s to a result of Ceder [Ced64] (also see Buc k and Buc k [BB49] for a sp ecial case). W e also sho w that 2 d − 1 is the largest p ossible num b er of h yp erplanes in Theorem 1.7: Theorem 1.8. F or every inte ger m ≥ 2 d ther e exists an absolutely c ontinuous pr ob ability me asur e µ on R d that c annot b e p artitione d into 2 m e qual p arts by an m - fan. 2 The construction for Theorem 1.3 W e no w pro ve Theorem 1.3 by constructing a suitable p oin t set S . Giv en r eal num b ers a, b > 1, let a ≪ b mea n th at f ( a ) < b for some fixed, sufficien tly large function f (concretel y , w e can tak e f ( x ) = ( d + 1)! x d +1 ). Our p oint set is S = { p 1 , . . . , p n } , with p i = ( p i 1 , p i 2 , . . . , p id ) ∈ (1 , ∞ ) d , where the comp onen ts p ij satisfy p ij ≪ p i ′ j ′ whenev er j < j ′ , or j = j ′ and i < i ′ (so the ordering of the p ij is first b y the co ord inate index j and then by the p oin t index i ). The idea of taking p oint s separated by rapidly-increasing distances is borr o wed f r om Boros and F ¨ uredi’s planar constructio n [BF84]. Ho wev er, their construction is more complicate d, with p oin ts group ed in to three clusters; see App endix A. 4 Figure 1: ( a ) In the x 1 x 2 -plane, the segmen t p ′ i p ′ j has a smaller slop e than the segment p ′ j p ′ k . ( b ) In the planar ca se, the p oin t r must lie ab o ve-rig h t of q 0 , ab o ve-le ft of q 1 , and b elo w-left of q 2 . Lemma 2.1. Th e set S is in c onvex p osition. Pr o of. Let p ′ i = ( p i 1 , p i 2 ) b e the pro jection of p oint p i in to the x 1 x 2 -plane, fo r 1 ≤ i ≤ n . W e claim that the p oint s p ′ i lie on an x 1 -monotone con v ex curv e in the x 1 x 2 -plane (whic h implies the lemma). T o this end, we show that for ev ery three p oint s p ′ i , p ′ j , p ′ k , with i < j < k , the segmen t p ′ i p ′ j has a smaller slop e than the segmen t p ′ j p ′ k ; see Fig ure 1( a ). In deed, this is the case if and only if ( p k 2 − p j 2 )( p j 1 − p i 1 ) > ( p j 2 − p i 2 )( p k 1 − p j 1 ) . (4) But (4 ) will hold as long as t he function f in the definition o f ≪ is c hosen large enough . Sp ecifically , if f ( x ) ≥ 4 x 2 , then the left-hand side of (4) is at least 1 2 p k 2 · 1 2 p j 1 ≥ 1 4 p k 2 ≥ p 2 j 2 , whic h is larger than the righ t-hand side of (4). Next, w e w an t to sho w that n o p oint r = ( r 1 , . . . , r d ) ∈ R d is co n tained in more than ( n/ ( d + 1)) d +1 + O ( n d ) of the d -simplices spanned by S . W e can assume th at p 1 j ≤ r j ≤ p nj for eac h coordinate 1 ≤ j ≤ d , since otherwise, r is not con tained in any d -simplex spanned by S . F or eac h co ordinate j = 1 , . . . , d , w e d iscard from S the last p oin t p i with p ij ≤ r j and the first p oin t p i with p ij ≥ r j . Let S ′ b e t he resu lting set. Since we h a ve discarded at most 2 d p oin ts, the num b er of d -simplices inv olving an y of the d iscarded p oin ts is on ly O ( n d ). And now, for ev ery p i ∈ S ′ and ev ery j , w e ha ve either r j ≪ p ij or r j ≫ p ij . Let a = ( a 1 , . . . , a d ) ∈ R d b e a p oint ; w e define the typ e of a with resp ect to r as max { k : a j > r j for all j = 1 , 2 , . . . , k } . Not e that the t yp e of a is an in teger b et w een 0 and d (it is 0 if a 1 ≤ r 1 ). 5 Let p i 0 , . . . , p i d ∈ S ′ span a d -simplex con taining r , with i 0 < · · · < i d . F or con v e- nience, w e rename these p oint s and their co ord inates as q ℓ = ( q ℓ 1 , . . . , q ℓd ) , for ℓ = 0 , 1 , . . . , d. The pro of of Theorem 1.3 will b e almost fi nished once w e establish the follo wing: Lemma 2.2. F or e ach ℓ = 0 , 1 , . . . , d , the p oint q ℓ has typ e ℓ with r esp e ct to r . (Se e Figur e 1(b) for an il lustr ation of the planar c ase.) Indeed, assuming this lemma, th e pro of of Th eorem 1.3 is concluded as follo ws. Give n r , we partition the p oin ts of S ′ in to d + 1 subsets S ′ 0 , . . . , S ′ d according to their t yp e. Then, for a d -simplex spanned by d + 1 p oin ts from S ′ to con tain r , eac h p oin t m ust come from a differen t S ′ k . The n umber of s u c h simplices is thus at most Q d k =0 | S ′ k | ≤ ( n/ ( d + 1)) d +1 , b y the arithmetic-ge ometric mean inequalit y . Pr o of of L emma 2.2. W e are going to derive the foll o w in g relations: q ( j − 1) j ≪ r j ≪ q j j for ev ery j = 1 , 2 , . . . d. (5) Let us first chec k that they imply the lemma. T o see that q ℓ has t yp e ℓ , w e need that q ℓj > r j for j ≤ ℓ and , if ℓ < d , also that q ℓ ( ℓ +1) ≤ r ℓ +1 . The last inequalit y f ollo ws f rom (5) with j = ℓ + 1. T o deriv e q ℓj > r j , w e use that the coord in ates of q ℓ are increasing since q ℓ ∈ S , and thus q ℓj ≥ q j j > r j . No w w e start wo rking on (5). First we express the condition that r lie i n the simplex spanned b y q 0 , . . . , q d using determinan ts. F or eac h ℓ , the p oin ts r and q ℓ m ust lie on the same side of the hyp erplane spann ed b y the p oints q m , m 6 = ℓ . Th us, let M b e the ( d + 1) × ( d + 1) matrix consisting of ro ws (1 , q 0 ), (1 , q 1 ),. . . , (1 , q d ). F or k = 0 , 1 , . . . , d , let M k b e the matrix obtained from M b y replacing the ro w (1 , q k ) by (1 , r ). T hen, for eac h k , det M k m ust ha ve the same sign as det M . Next, w e show that det M and eac h det M k are “dominated” by a single pro duct of en tries. Let A b e o ne of the matrices M , M 0 , M 1 , . . . , M d , and denote by a ℓj the entry in ro w ℓ and col umn j of A , for 0 ≤ ℓ, j ≤ d . W e claim that if the function f in the definition of ≪ is c hosen sufficien tly large, then there is a single pro duct of the form sign( σ ) Q ℓ a ℓσ ( ℓ ) , for some p ermuta tion σ , whic h is larger in absolute v alue than the sum of absolute v alues of all the other pro du cts in det A . Indeed, let a ℓ d d b e the large st entry in the last column of A . This is also the largest en try in the en tire matrix. Then, if w e take f ( x ) ≥ ( d + 1)! x d +1 , any p ermutatio n pro du ct in v olving a l d d is larger than ( d + 1)! times an y p ermutation pro du ct not inv olving this en try . T h us, w e c ho ose a ℓ d d as the first term in our pr o duct, we remo v e r o w ℓ d and column d from A , and we con tinue in this f ashion left w ards. W e obtain a p ro duct Q ℓ a ℓσ ( ℓ ) whic h is larger than ( d + 1)! times any other p ermutatio n pr o duct in det A . Th erefore, this pro du ct “d ominates” det A in th e ab o ve sense, and so sign(det A ) = sign( σ ). In particular, these considerations for A = M s h o w that d et M is dominated by the pro du ct q dd q ( d − 1)( d − 1 ) · · · q 11 · 1 6 corresp onding to the identit y p ermuta tion. Therefore, det M > 0, and so we m ust hav e det M k > 0 f or all k . No w we are ready to pro v e (5). First w e su pp ose for con tr adiction that r j ≫ q j j for some j = 1 , 2 , . . . , d . W e tak e the largest suc h j ; th us, q k k ≫ r k for k > j . Then det M j − 1 is dominated b y the pro duct q dd · · · q ( j +1)( j +1) r j q j ( j − 1) q ( j − 2)( j − 2) · · · q 11 · 1 , so the sig n of det M j − 1 is the sig n of the p ermuta tion asso ciated wit h this pro duct. This is a p ermutat ion with exactly one in v ersion, so det M j − 1 < 0, w h ic h is a contradict ion. Next, w e supp ose for con tradiction that r j ≪ q ( j − 1) j for some j = 1 , 2 , . . . , d . No w w e tak e the smal lest suc h j . W e ha ve already sho w n that r k ≪ q k k for all k . T herefore, det M j is dominated b y the pro d u ct q dd · · · q ( j +1)( j +1) q ( j − 1) j r j − 1 q ( j − 2)( j − 2) · · · q 11 · 1 . Again, this p r o duct corresp ond s to a permutatio n with exa ctly one inv ersion, so we ha ve det M j < 0, w h ic h is again a con tradiction. 3 The construction for Theorem 1.5 W e no w present the construction that pr ov es Th eorem 1.5. Let us call a set Y ⊆ R d antisymmetric if Y ∩ ( − Y ) = ∅ . W e mak e u se of the follo wing result of W endel: Lemma 3.1 ([W en62]) . L et X = { x 1 , . . . , x d +1 } b e a set of d + 1 p oints i n gener al p osition on the unit spher e S d − 1 in R d . Then ther e ar e exactly tw o ant isymmetric ( d + 1) -p oint subsets of X ∪ ( − X ) whose c onvex hul l c ontains the o rigin; if o ne of them is Y , then the other one is − Y . Let α ∈ (0 , 1 / 2] b e a parameter a nd let n b e give n. F or the moment assu me for simplicit y that αn is an inte ger. Let A b e a set of αn p oint s on S d − 1 and let p b e another p oint on S d − 1 suc h that A ∪ { p } is in general p osition — namely , su c h that the set A ∪ ( − A ) ∪ { p } has 2 | A | + 1 p oin ts and no h yp erplane con taining p and a ( d − 1)-p oin t an tisymmetric subset of A ∪ ( − A ) p asses through the origin. Let P b e a ve ry sm all cluster of (1 − 2 α ) n p oin ts around p . Our set is S = A ∪ ( − A ) ∪ P . Note that | S | = n as required. The origin clea rly lies at depth αn with resp ect to S . Th us, Theorem 1.5 reduces to the follo wing lemma: Lemma 3.2 . The numb e r of ( d + 1) -p oint subsets B of S such that con v B c ontains the origin is ( d + 1) α d − 2 dα d +1 n d + 1 + O ( n d ) . Pr o of. Th e n u m b er of ( d + 1)-p oin t subs ets o f S that c on tain a pair of an tip o dal p oin ts (one in A and one in − A ) is O ( n d ), and so it suffices to coun t the n u m b er of B th at are an tisymmetric. 7 The c hoice of A and P guarant ees that if B is an tisymmetric and | B ∩ P | ≥ 2, then 0 6∈ con v B . So we need to consider the cases B ∩ P = ∅ and | B ∩ P | = 1. Let us set ˜ B = { x ∈ A ∪ P : x ∈ B or − x ∈ B } . F or B ∩ P = ∅ th ere are αn d +1 w a ys of c ho osing ˜ B ⊆ A , and for eac h of them w e ha v e t wo c hoices for B b y Lemma 3.1. F or | B ∩ P | = 1, w e ha v e ( 1 − 2 α ) n αn d c h oices for ˜ B , and eac h of them yields exactly one B (Lemma 3.1 with X = ˜ B sh o w s that there are t wo B ⊂ ˜ B ∪ ( − ˜ B ) w ith 0 ∈ con v B , and exactly one of these con tains the p oint p ∈ P ∩ ˜ B , while the other con tains − p ). Altoge ther the num b er of B ’s is 2 αn d +1 + (1 − 2 α ) n αn d + O ( n d ), and the lemma follo ws b y alge braic manip ulation. If αn is not an integ er, then apply the ab ov e argumen t using α ′ = ⌈ αn ⌉ /n , and use the fact that α ′ − α < 1 /n . 4 P artitioning measures b y fans of h yp erplanes In this sect ion w e pro ve Theorem 1. 7, whic h is the main ingredien t in the proof of Theorem 1.6 . W e then prov e Theorem 1 .8, sho wing that Theorem 1.7 is opti mal. Recall that an m -fan is a set of m hyperplanes in R d sharing a common ( d − 2)-flat. Let S d − 1 denote the unit sphere in R d , and let V d, 2 = { ( v , w ) ∈ ( S d − 1 ) 2 : v ⊥ w } denote the set of ordered pairs of orthonormal v ectors in R d (calle d the Stiefel manifold of orthogonal 2-frames) . Th e pr o of of Theorem 1.7 is based on the f ollo wing top ological result: Lemma 4.1. Ther e exists no c ontinuous function g : V d, 2 → S 2 d − 4 with the fol lowing pr op erty: F or every ( v , w ) ∈ V d, 2 , if g ( v , w ) = ( a 1 , . . . , a 2 d − 3 ) (w ith a 2 1 + . . . + a 2 2 d − 3 = 1 ), then • g ( − v , w ) = ( − a 1 , . . . , − a d − 1 , a d , . . . , a 2 d − 3 ) , and • g ( v , − w ) = ( a 1 , . . . , a d − 1 , − a d , . . . , − a 2 d − 3 ) . Pr o of. Th e lemma is a r esult on nonexistence of an e quivariant map . Let us briefly r ecall the basic setting; for more bac kground w e refer to [ ˇ Ziv04], [Mat08]. Let G b e a finite g roup. A G -sp ac e is a top ological space X together with an action of G on X , whic h is a colle ction ( ϕ g ) g ∈ G of h omeomorph ism s ϕ g : X → X whose comp o- sition agrees w ith the group operation in G ; that is, ϕ e = id X for the u n it elemen t e ∈ G and ϕ g ◦ ϕ h = ϕ g h for all g , h ∈ G . In our case, the r elev ant group is G := Z 2 × Z 2 (the d irect pro duct of t w o cyclic groups of order 2). W e can write G = { e, g 1 , g 2 , g 1 g 2 } , where g 1 and g 2 are t wo generators of G ; in ord er to sp ecify an actio n of G , it is enough to giv e the homeomorph ism s corresp onding to g 1 and g 2 . The lemma deals with t w o G -spaces: • T he S tiefel manifold V d, 2 with the action ( ϕ g ) g ∈ G of G giv en b y ϕ g 1 ( v , w ) = ( − v , w ), ϕ g 2 ( v , w ) = ( v , − w ). 8 • T he sphere S 2 d − 4 with the action ( ψ g ) g ∈ G , where ψ g 1 flips the signs of the first d − 1 co ord inates and ψ g 2 flips the signs of the remaining d − 2 co ord in ates. W e wa n t to pro v e that there is no e quivariant map f : V d, 2 → S 2 d − 4 , where an equiv arian t map is a con tinuous map that comm utes with the actio ns of G , i .e., suc h that f ◦ ϕ g = ψ g ◦ f for all g ∈ G . Th e “usual” elemen tary metho d s for showing nonexistence of equiv arian t maps, e xplained i n [ ˇ Ziv04], [Mat08 ] and based on th e Borsuk–Ulam theorem and it s generali zations, cannot b e applied here. W e use the ide al-value d c ohomol o gic al index of F adell and Huss eini [FH88] (also see [ ˇ Ziv98]). This metho d assigns to ev ery G -space X the G -index of X , denoted b y Ind G ( X ), whic h is an ideal in a ce rtain ring R G (dep ending only on G ). A k ey prop erty is that whenev er there is an equiv arian t map f : X → Y , where X and Y are G -spaces, w e ha v e In d G ( Y ) ⊆ Ind G ( X ). F or the considered G = Z 2 × Z 2 , R G is the r ing Z 2 [ t 1 , t 2 ] of p olynomials in t w o v ariables w ith Z 2 co efficients. The ge neral defi n ition of Ind G ( X ), as w ell as its computation, are r ather complicated, but fortunately , in our case w e can use ready-made results from the literature. F or the G -space S 2 d − 4 with the G -action as ab ov e, the G -i ndex is the principal ideal in Z 2 [ t 1 , t 2 ] generated by t d − 1 1 t d − 2 2 according to Corollary 2.12 in [ ˇ Ziv98]. On the other hand, F adell [F ad89] pr o ved that the G -index of the G -space V d, 2 with th e describ ed G -acti on does not con tain the monomial t d − 1 1 t d − 2 2 (also see [Ino06] f or a sta temen t of this result and so me app licatio ns of it). This shows that an equiv arian t map a s i n the lemma is indeed imp ossible. Pr o of of The or em 1.7. W e follo w the “configuration space/t est map” paradigm (see, e.g., [ ˇ Ziv04]). W e enco de eac h “candidate” for the desired equipartition, w h ic h in our case is g oing to be a certain sp ecial fan of 4 d − 2 half-h yp erplanes sharing the b oundary ( d − 2)-flat, by a p oint of V d, 2 . Then w e define a co n tin u ous test map that assigns to eac h candidate fan of h alf-h yp erplanes a (2 d − 3)-tuple of rea l n um b ers, whic h measures ho w far the giv en candidate is from b eing a (2 d − 1)-fan of h yp erplanes. Finally we wil l c h ec k th at if there we re no equipartition, the test map would yield an equiv arian t map V d, 2 → S 2 d − 4 , whic h w ould con tradict L emm a 4.1. The deta ils follo w. F or the pr o of w e ma y assume that ev ery nonempty op en set has a p ositiv e µ -measure. (Giv en an arbitrary µ , we can consider the conv olution µ ∗ γ ε of µ with a suitable probabilit y measure γ ε whose densit y f u nction is ev erywhere nonzero but for whic h all but at most ε of the mass lies in a ball of radius ε around 0. T he con v olution has the required pr op ert y and then, giv en an equipartition for eac h µ ∗ γ ε a limit argumen t, letting ε → 0, yields an equipartition for the original µ . See t he pro of of [Mat0 8 , Theorem 3.1.1] for a similar limit argumen t.) Let m = 2 d − 1. Supp ose w e are giv en t w o orthonormal v ectors v , w ∈ S d − 1 . L et h b e the un iqu e h yp erplane orthogonal to v that splits R d in to t w o halfspaces of equal measure with resp ect to µ . W e sa y that the h alfspace in t he direction of v is “ab ov e” h , and the other halfspace is “b elo w ” h . Let ℓ b e a ( d − 2)-flat orthogonal to w co n tained in h . Note that ℓ splits h in to t wo half-h yp erplanes. W e sa y that the half of h in the direction of w lies “ left” of ℓ , and t he other half of h lies “righ t” of ℓ . 9 Figure 2: 2 m half-h yp erplanes coming out of ℓ that partition the measure µ in to 2 m equal parts. (Here m = 5.) Ev ery half-hyp erp lane with b oundary ℓ is uniquely determined b y the angle it ma k es with the left half of h . Let f 0 , f 1 , . . . , f 2 m − 1 b e 2 m half-h yp erplanes coming out of ℓ , listed in circular order, that split the measure µ in to 2 m equal parts, as follo ws: • f 0 is the left half of h ; • f 1 , . . . , f m − 1 lie ab o v e h ; • f m is the righ t half of h ; and • f m +1 , . . . , f 2 m − 1 lie b elo w h . See Figure 2. F or i = 1 , . . . , m − 1, let α i b e the angle b et ween f 0 and f i , and let β i b e the angle b et w een f m and f m + i . Let γ i = α i − β i . Note that γ i = 0 means that f i and f m + i are aligned in to a h yp erplane. T ranslating ℓ within h to t he l eft ca uses the α i ’s to increase and the β i ’s to decrease, while translating it to the righ t has the opp osite effect. Th erefore, there e xists a unique p osition of ℓ for w h ic h P α i = P β i , or equiv alen tly , P γ i = 0, and w e fix ℓ there. In this wa y , we ha v e defin ed eac h α i and β i as a function of the giv en v ectors v , w . Using the assumption that µ is absolutely con tinuous with resp ect to the Leb esgue measur e and eac h op en set h as a p ositiv e µ -measure, it is routine to ve rify the cont in uit y of the α i and β i as functions of v and w . Let us examine what happ ens when w e change the sign of v or w . W e ha v e: α i ( − v , w ) = π − β m − i ( v , w ) , β i ( − v , w ) = π − α m − i ( v , w ) , α i ( v , − w ) = π − α m − i ( v , w ) , β i ( v , − w ) = π − β m − i ( v , w ) . See Figure 3. Therefore, γ i ( − v , w ) = γ m − i ( v , w ) , γ i ( v , − w ) = − γ m − i ( v , w ) . 10 Figure 3: The effect of c hanging the sign of v (left) or w (righ t). No w w e in tro duce a suitable change of co ord inates in the target space so that the resulting map b ehav es as the map g considered in Lemma 4.1. Na mely , w e set λ i = γ i − γ m − i , for i = 1 , . . . , ( m − 1) / 2; µ i = γ i + γ m − i , for i = 2 , . . . , ( m − 1) / 2 . Note that λ i ( − v , w ) = − λ i ( v , w ) , µ i ( − v , w ) = µ i ( v , w ) , λ i ( v , − w ) = λ i ( v , w ) , µ i ( v , − w ) = − µ i ( v , w ) . W e ha v e γ i = 0 for all i if and only if λ i , µ i = 0 for a ll i . (Recall that P γ i = 0.) No w w e define the “te st m ap” G : V d, 2 → R m − 2 b y G ( v , w ) = ( λ 1 , . . . λ ( m − 1) / 2 , µ 2 , . . . , µ ( m − 1) / 2 ) . Then, our desired equipartitio n of µ exists if and only if G ( v , w ) = (0 , . . . , 0) for some ( v , w ). But G is a cont in uous map such that flipping v flips the fir st ( m − 1) / 2 = d − 1 co ord inates of the image , while flipping w flips the la st ( m − 3) / 2 = d − 2 coordinates of the image. If we had G 6 = (0 , . . . , 0) for all ( v , w ), the map g : V d, 2 → S 2 d − 4 giv en b y g ( v , w ) = G ( v, w ) / k G ( v , w ) k would con tradict Lemma 4.1. Therefore, the desired equipartition exists. W e conclude th is sectio n b y p ro ving Th eorem 1.8, whic h sho ws that Theorem 1.7 is b est p ossible, in the sense that an equipartition of a measure µ in R d b y a f an of 2 d or more hyp erplanes do es n ot necessarily exist. The p ro of is based on the follo w ing lemma: Lemma 4.2. L et m > 0 b e an i nte g er and let t ≥ 2 d + m − 1 . Then ther e exists a t -p oint set T ⊂ R d that c annot b e c over e d by any m -fan in R d . The basic idea, roughly sp eaking, is that an m -fan in R d has 2 d + m − 2 degrees of freedom, while eac h p oin t in T tak es aw a y one degree of freedom. Therefore, T can b e completely co ve red b y an m -fan only if it is degenerate an appropriate sense. 11 Pr o of of L emma 4.2. F or con v enience w e first pro v e the r esult in RP d , the d -dimensional pro jectiv e space, and then w e sho w that the result also applies to R d . A set of m hyp erp lanes in RP d share a common ( d − 2)-flat if and only if their du al p oint s, when co nsidered as v ectors in R d +1 , span a v ector space of dimension at most 2. Th us, define the pro jectiv e v ariet y V = ( p 1 , . . . , p m ) ∈ ( RP d ) m : rank( p 1 , . . . , p m ) ≤ 2 , where rank ( p 1 , . . . , p m ) den otes the dimension of the v ector space sp anned by p 1 , . . . , p m as v ectors in R d +1 . The v ariet y V has dimension dim V = 2 d + m − 2. Giv en a p oin t p = p 0 : p 1 : · · · : p d ∈ R P d , let p ∗ = { x 0 : · · · : x d ∈ R P d : P i x i p i = 0 } denote the h yp erplane dual to p . F or eac h v = ( p 1 , . . . , p m ) ∈ V , let v ∗ = S i p ∗ i ⊂ RP d b e the v ariet y wh ic h consists of the union of the hyp erplanes dual to the p oints in v . Finally , define the mod uli space C = ( v , q 1 , . . . , q t ) ∈ V × ( RP d ) t : q 1 , . . . , q t ∈ v ∗ of all t -tuples of p oin ts lying on a fan v ∗ , for all v ∈ V . The dimension of C is dim C = dim V + t ( d − 1) = 2 d + m − 2 + t ( d − 1). Consider the pro jection map π : V × ( RP d ) t → ( RP d ) t . Then the p r o jection π ( C ) is the set of t -t uples of p oints in RP d that can b e co v ered b y an m -fan. By the T arski– Seiden b erg Th eorem [BPR06] π ( C ) is a semialgebraic subset of ( RP d ) t . Since p ro jection do es not increase dimension, π ( C ) is of dimension at most 2 d + m − 2 + t ( d − 1), which b y our c h oice of t is smaller than td = dim( RP d ) t . Th us, there exists a t -p oint set T in R P d that cannot b e co v ered b y an m -fan. Finally , a generic R d inside RP d completely con tains T , and the lemma follo ws. Pr o of of The or em 1.8. Gi v en an intege r m ≥ 2 d , let t = 2 m − 1. W e ha v e t ≥ 2 d + m − 1, so by the preceding lemma th ere exists a t -p oint set T ⊂ R d that cannot b e co v ered b y an y m -fan in R d . There must exist a p ositiv e radiu s r suc h that, for every m -fan F in R d , some p oint of T lies at d istance at le ast r from the closest hyperp lane in F . (Otherw ise a limit argumen t w ould yield an m -fan that co ve rs T .) Let C r ( p ) denote the ball of radius r cent ered at p . Let µ b e the uniform measur e on S p ∈ T C r ( p ). T hen, in ev ery partition of R d in to 2 m parts b y an m -fan, there exists a part that complete ly co n tains one of the balls C r ( p ). Th is part has mea sure at le ast 1 t > 1 / (2 m ), and so the partition is not an equipartition. 5 Stabbing man y triangles in R d In this sectio n w e pro v e Theorem 1.6 b y means of Theorem 1.7. The p ro of is an extension of the tec hniqu e in [Buk06] for the case d = 2. By a standard approac h (see e.g. Theorem 3.1.2 in [Mat08]), Theorem 1.7 implies th e follo wing discrete v ersion, whic h is wh at w e actually use: 12 Figure 4: ( a ) A triangle with three short s id es alwa ys con tains x . ( b ) The triangles with one medium si de can be partitioned in to pairs, suc h that at least one triangle from ea c h pair con tains x . ( c ) A triangle with one long side neve r con tains x . Corollary 5.1. L et S b e a set of n p oints in R d . Then ther e exist 2 d − 1 hyp erplanes p assing thr ough a c ommon ( d − 2) -flat that divide the sp ac e into 4 d − 2 p arts, e ach c ontaining at most n/ (4 d − 2) + O (1) p oints of S . W e start with the follo wing lemma: Lemma 5.2. L et ℓ 0 , . . . , ℓ m − 1 b e m lines in the pl ane p assing thr ough a c ommon p oint x , dividing the plane i nto 2 m se ctors. L et P = { p 0 , . . . , p 2 m − 1 } b e 2 m p oints, one fr om e ach se ctor, liste d in cir cular or der ar ound x . Then, out of the 2 m 3 triangles define d by P , at le ast ( m + 1) m ( m − 1) / 3 c ontain x . (This minimum is a chieve d if P ∪ { x } is in gener al p osition, in p articular if no two p oints of P ar e c ol line ar with x .) Pr o of. Let p i p j b e a directed segmen t joining tw o p oin ts of P , and let d = ( j − i ) mo d 2 m . If 0 ≤ d ≤ m − 1, w e call the segment p i p j short ; if d = m , w e c all it me dium ; and if m + 1 ≤ d ≤ 2 m − 1, we call it long . A triangle p i p j p k , with i < j < k , can ha v e either three short sid es, o r t w o short sides and one medium side, or t w o short sides and one long side. It is easy to see that all the triangles with three short sides cont ain x , and none of the triangles with one long side cont ain x . F urthermore, the triangles with one medium side can b e group ed into pai rs, suc h that from eac h pair, a t le ast on e triangle conta ins x (exactl y one triangle if P ∪ { x } is in general p osition). S ee Figure 4. The n um b er of triangles with three short sides is 2 m 3 1 + 2 + · · · + ( m − 2) = m ( m − 1)( m − 2) 3 ; and th e num b er of triangles with one medium side is 2 m ( m − 1). T h us, P defines at least m ( m − 1)( m − 2) 3 + m ( m − 1) = ( m + 1) m ( m − 1) 3 triangles that con tain x (exac tly these man y if P ∪ { x } is in general p osition). Corollary 5.3. L et h 0 , . . . , h m − 1 b e m h yp e rplanes in R d that p ass thr ough a c ommon ( d − 2) -flat ℓ and divide sp ac e into 2 m p arts. L et P = { p 0 , . . . , p 2 m − 1 } b e 2 m p oints, one fr om e ach p art. Then P defines at le ast ( m + 1) m ( m − 1) / 3 triangles that interse ct ℓ . 13 Pr o of of The or em 1.6. Let S b e an n -p oint set in R d . By C orollary 5.1 there exist 2 d − 1 h yp erplanes th at p ass th r ough a common ( d − 2)-flat ℓ and p artition S in to parts of size at most n/ (4 d − 2) + O (1) eac h . W e show that ℓ is our desired ( d − 2)-flat. Eac h part has at least n/ (4 d − 2) − O (1) p oin ts, so there are at least n 4 d − 2 − O (1) 4 d − 2 w a ys to c ho ose 4 d − 2 p oints, one from ea c h part. By Corollary 5.3 , ea c h suc h choic e of p oin ts defines at least 2 d (2 d − 1)(2 d − 2) / 3 triangles that in tersect ℓ . On the other h and, eac h suc h triangle is counted at most n 4 d − 2 + O (1) 4 d − 5 times. Thus the n u m b er of triangles in tersecte d b y ℓ is at least n 4 d − 2 − O (1) 4 d − 2 · 2 d (2 d − 1)(2 d − 2) 3 n 4 d − 2 + O (1) 4 d − 5 = d 2 − d 6(2 d − 1) 2 n 3 − O ( n 2 ) . 6 Discussion The main op en pr oblem is to determine the exact v alue of the constan ts c d of the First Selection Lemma for d ≥ 3. There remains a multiplica tiv e gap of roughly ( d − 1)! b et w een the curren t lo we r b ound (1) and our upp er boun d (g iv en by Theorem 1.3). W e conjecture that Th eorem 1.3 is tigh t, and that the correct constan ts are c d = ( d + 1) − ( d +1) . W e su sp ect that the construction in Theorem 1.3 also witnesses sharpness of The- orem 1. 6. But, to our embarrassmen t, we ha v e b een unable to find ev en the line that stabs most triangles in this construction for d = 3. 6.1 A generalization of cen terp oin ts Rado’s Cen terp oin t Theorem [Rad47] implies that for ev ery n -p oint set S in R d there exists a ( d − 2)-flat ℓ that lies at depth n/ 3 with resp ect to S , in the sense that every halfspace th at con tains ℓ con tains at lea st n/ 3 p oin ts of S . (Simply pro ject S in to an arbitrary plane.) But the ( d − 2)-flat ℓ of Corollary 5.1 lies at depth ( d − 1) n/ (2 d − 1) − O (1) with resp ect to S . ( Indeed, ev ery halfspace that con tains S co mpletely con tains 2 d − 2 of the 4 d − 2 p arts men tioned in Corollary 5.1.) W e do not kno w whether this b ound is tig h t. This s u ggests the follo wing generalizatio n of Rado’s T h eorem: I f S is an n -p oint set in R d and 0 ≤ k < d , then there alw a ys exists a k -flat at depth δ d,k n with resp ect to S — a “cen ter- k -flat”—for some constan ts δ d,k . The general question of d etermining these constant s δ d,k has not b een explored, as far as w e kn ow. (The formula δ d,k = ( k + 1) / ( d + k + 1) seems to fit all the curren tly kno wn d ata.) 6.2 F rom the First Selection Lemma t o the Second The First S electio n Lemma has b een generaliz ed by B´ ar´ an y et al. [BFL90], in conjunction with Alon e t al. [ABFK92], and ˇ Ziv aljevi ´ c and V re ´ cica [ ˇ ZV92], to the follo wing result, 14 called the Se c ond Sele ction L emma in [Mat02]: If S is an n -p oint set in R d and F is a family of m ≤ n d +1 d -simplices spanned b y S , then there exists a p oin t p ∈ R d con tained in at least c ′ d m n d +1 s d n d +1 (6) simplices of F , for some constan ts c ′ d and s d that dep end only on d . (Note that m/n d +1 = O (1), so the smaller the constan t s d , the stronger the b ound .) The Second Selection L emma is an imp ortan t ingredien t in the deriv ation of non- trivial upp er b ounds f or the num b er of k -sets in R d (see [Mat02, c h . 11] f or the defin ition and d etails). The deriv ation p r o ceeds by “lifting” the lemma by one dimension, obtaining that if F is a family of m d -simplices spanned b y n p oin ts in R d +1 , then there exists a line that stabs Ω m n d +1 s d n d +1 simplices of F . Do es this lifting step resu lt in a loss of tigh tness? If w e ma y mak e an analogy from the results of this pap er, it seems t hat the answ er is y es. (As w e sho w ed, c 2 , 0 = 1 / 27 by Theorem 1.3, whereas c 3 , 1 ≥ 1 / 25 by Theorem 1.6.) The cu r ren t b est b ound for the S econd Selection Lemma for d = 2 is Ω( m 3 / ( n 6 log 2 n )), due to E ppstein [Epp93, NS] (so s 2 can b e tak en arbitrarily close to 3 in (6)). On the other hand, we kn ow that if F is a set of m triangles in R 3 spanned by n p oin ts, there exists a line (sp ecifically , a line determined by t w o p oints of S ) that s tabs Ω( m 3 /n 6 ) triangles of F (see [DE94] and [Smo03] for t wo differen t pr o ofs of this fact). It might turn out that this logarithmic gap b et w een the t w o cases is an artifact of the curren t pro ofs, but w e b eliev e t hat the three-dimensional problem do es ha v e a larger b ound than the planar one. Ac kno wledgmen t W e would lik e to thank an anon ym ous referee for useful commen ts. References [ABFK92] Noga Alon, Imr e B´ ar´ any , Zolt´ an F¨ uredi, and Daniel J. Kleitman. P oin t selectio ns and w eak ǫ -nets for con vex hulls. Combin., Pr ob ab. Comput. , 1:189– 200, 1992. htt p://www. math.tau. ac.il/ ~ nogaa/PD FS/abfk3 .pdf . [B´ ar82] Imre B´ ar´ any . A generaliza tion of C arath´ eod ory’s theorem. Discr ete Math. , 40:141 –152, 1982 . [BB49] Rob ert C . Buc k and Ellen F. Buck. Equipartitio n of con vex sets. Math. Mag. , 22:195 –198, 1948 /49. [BF77] En dre Boros and Zolt´ an F ¨ uredi. Su un teo rema d i K´ arteszi nella geo metria com bin atoria. Ar chime de , 2:71–76, 197 7. [BF84] En dre Bo ros and Zolt´ an F¨ uredi. The n umber of triangles co vering the cen ter of an n -set. Ge om. De dic ata , 17:69–77, 1984. 15 [BFL90] Imre B´ ar´ an y , Zolt´ an F ¨ uredi, a nd L´ aszl´ o Lo v´ asz. On the n um- b er of halving planes. Combinator ic a , 10(2):175 –183, 1990. http://w ww.cs.el te.hu/ ~ lovasz/m orepaper s/halvin gplane.pdf . [BPR06] Saugata Basu, Ric h ard P ollac k, and Marie- F r an¸ coise Ro y . Algorit hms in r e al algebr aic ge ometry , v olume 10 of A lgorithms and Computation in Mathemat- ics . Sp r inger-V erlag, Berlin, second edition, 2006. [Buk06] Boris B ukh. A p oin t in man y triangles. E le ctr on. J. Combin. , 13(1):Not e 10, 3 pp. (electronic), 2006. [Ced64] Jac k G. Ceder. Generalized sixp artite problems. Bol. So c. Mat. Me xic ana (2) , 9:28–32 , 1964 . [DE94] T amal K. Dey and Herb ert Edelsbrun n er. Coun ting triangle crossings and halving planes. Discr ete Comput. Ge om. , 12(1 ):281– 289, 1994. [Epp93] Da vid Eppstein. Impro v ed b ounds for in tersecting triangles and halving planes. J. Comb. The ory Ser. A , 62(1):17 6–182 , 1993. http://w ww.ics.u ci.edu/ ~ eppstein /pubs/Ep p- TR- 91- 60.pdf . [F ad89] Edw ard R. F adell. Ideal-v alued generalizations of L justernik-Sc hnierlmann catego ry , with applications. In Edward F adell et al., editors, T opics in Equiv- ariant T op olo gy , volume 108 of S ´ em. Math. Sup. , pages 11–5 4. Press Univ. Mon tr´ eal, 198 9. [FH88] Edward R. F adell and S ufian Huss eini. An ideal-v alued cohomological in- dex theory with app licatio ns to Borsuk–Ulam and Bourgin–Yang theorems. Er go d. Th. Dynam. Sys. , 8:73–85, 198 8. [Ino06] Akira Inoue. Borsuk-Ulam t yp e theorems on Stiefel manifolds. Osaka J. Math. , 43(1): 183–1 91, 2006. http://p rojecteu clid.org /euclid.ojm/1146243001 . [K´ ar55] F ranz K´ arteszi. Extremala ufgab en ¨ ub er endlic he Punktsysteme. P ubl. Math. Debr e c en , 4:16–27, 195 5. [Mat02 ] Ji ˇ r ´ ı Matou ˇ sek. L e c tur es on Discr ete Ge ometry . S p ringer-V erlag New Y ork, Inc., Secaucus, NJ, USA, 2002. [Mat08 ] Ji ˇ r ´ ı Matou ˇ sek. Using the Borsuk–Ulam the or em . Springer, Berlin, 20 08. Revised 2nd printing. [Moo68] John W. Mo on. T opics on T ournaments . Holt, Rinehart and Winston, New Y ork, 1968. [NS] Gabriel Niv asc h and Mic ha Sharir. Eppstein’s b ound on in tersecting triangles revisited. J. Comb. The ory Ser. A , to app ear. arXiv:0804.44 15 . 16 [Rad47] Ric hard Rado. A theorem on general measure. J. L ondon M ath. So c . , 21:291– 300, 1947. [Smo03] Sh akhar Smoro dinsky . Combinator ial pr oblems in c omputa- tional ge ometry . PhD thesis, T el Aviv Universit y , June 2003. http://w ww.cs.bg u.ac.il/ ~ shakhar/ my_paper s/phd.ps.gz . [W ag03] Ul ric h W agner. On k -Sets and Appl ic ations . PhD thesis, ETH Z ¨ uric h, June 2003. http ://www.i nf.ethz. ch/ ~ emo/Doct ThesisFi les/wagn er03.pdf . [W el01] Emo W elzl. En tering and lea ving j -facets. Discr ete Comput. Ge om. , 25:3 51–36 4, 2001. http://w ww.inf.e thz.ch/p ersonal/emo/PublFiles/EnterLeave_DCG25_01.ps . [W en62] James G. W end el. A problem in geometric probabilit y . Math. Sc and. , 11:109– 111, 1962. [ ˇ Ziv98] Rade T. ˇ Ziv aljevi ´ c. User’s guide to equiv ariant methods in combina torics I I. Publ. Inst. M ath. (Be o gr ad) (N . S.) , 64(78):1 07–132 , 1998 . [ ˇ Ziv04] Rade T. ˇ Ziv aljevi ´ c. T op ological metho d s. In Jacob E. Go o dman and Joseph O’Rourk e, editors, H andb o ok of Discr ete and Computation al Ge ometry , c hap- ter 14. CRC Press, Boca Raton, FL, second edition, 2004. [ ˇ ZV92] Rade T. ˇ Ziv aljevi ´ c and Sini ˇ sa T. V re´ cica . Th e colored Tv erb erg’s problem and complexes of injectiv e functions. J. Comb. The ory Ser. A , 61(2):309 –318, 1992. A The planar construction of Boros and F ¨ uredi Boros and F ¨ uredi [BF84] constructed a planar n -p oint set P n for wh ic h , they claimed, no p oint x ∈ R 2 is conta ined in more than n 3 / 27 + O ( n 2 ) triangles spann ed by P n . There is a p roblem i n their c onstruction, ho wev er, and, as w e s h o w here, there exists a p oint x con tained in 1 27 + 1 729 n 3 triangles spanned b y P n . Their set P n lies on the unit circle, and it consists of three clusters of n/ 3 points, denoted A , B , and C . Eac h cluster is very small (su fficien tly so), and the clusters are separated by an angular distance of roughly 2 π / 3 from eac h other. The construction is not symmetric, ho w ever. The points in cluster A are un iformly separated, while the p oin ts in clusters B and C are separated by rapidly increasing d istances (su fficien tly rapidly so), with the distances increasing away fr om A ; see Figure 5( a ). No w, let x b e a p oin t in the con vex hull of B ∪ C . F or eac h p oint b ∈ B , trace a line ℓ b from b through x , until it in tersects the unit circle again at b ′ . Let B ′ denote the set of these p oin ts b ′ . If B is sufficien tly small and x is not too close to B , then the lines ℓ b will b e almost parallel to eac h other. 17 Figure 5: ( a ) The set P n of Boros and F ¨ uredi. ( b ) Relativ e order of the p oin ts of B ′ (white circles) and C (blac k circles) along the unit circle (whic h app ears here almost as a straigh t line). The relativ e order b et ween the p oint s of B ′ and the p oints of C alo ng the unit circle determines the n umb er of triangles o f the form AB C , BB C , and B C C that con tain x . (By a tria ngle of the form AB C we mean a tria ngle abc with a ∈ A , b ∈ B , c ∈ C ; and so on.) In fact, eac h triangle of the form AB C con taining x corresp onds to a triple ab ′ c , wit h a ∈ A , b ′ ∈ B ′ , c ∈ C , suc h that c is farther from a than b ′ . S imilarly , eac h triangle of the form B B C co n taining x co rresp ond s t o a triple b ′ 1 b ′ 2 c , with b ′ 1 , b ′ 2 ∈ B ′ , c ∈ C , where c lies b et w een b ′ 1 and b ′ 2 . And eac h triangle of the form B C C conta ining x corresp onds to a triple b ′ c 1 c 2 , with b ′ ∈ B ′ , c 1 , c 2 ∈ C , where b ′ lies b et w een c 1 and c 2 . Note that the distances b et wee n the p oin ts of B ′ increase r ap id ly towar ds A . Also note that mo ving the p oint x to w ards or a wa y from B has the effect of enlarging or shrinking the image B ′ , while mo ving x sidew a ys has the effect of mo vin g B ′ sidew a ys. Therefore, it is not hard to see , w e can p osition the p oin t x suc h that the order of the p oin ts in B ′ ∪ C , r eading towar ds A , is: 2 n/ 9 p oin ts of C , follo w ed by n/ 9 p oin ts of B ′ , follo w ed by n/ 9 p oin ts of C , follo wed by 2 n/ 9 p oints of B ′ ; see Figure 5( b ). It follo ws that x is con tained in 8 243 n 3 triangles of the form AB C , 2 729 n 3 triangles of the form B B C , and 2 729 n 3 triangles of the form B C C . Th us, x is cont ained in a total of 28 729 n 3 = ( 1 27 + 1 729 ) n 3 triangles. On the other hand, it can b e c heck ed that this p oin t x is the one that stabs asymp- totica lly the m aximum num b er of tria ngles. Hence, this construction gi v es a b ound of c 2 ≤ 1 / 27 + 1 / 729. 18
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment