The space of stability conditions for quivers with two vertices
The purpose of this article is to study the space of stability conditions $\stab(P_n)$ on the bounded derived category $\D^b(P_n)$ of finite dimensional representations of a quiver $P_n$ with two vertices and $n$ parallel arrows. There is a local hom…
Authors: Takahisa Shiina
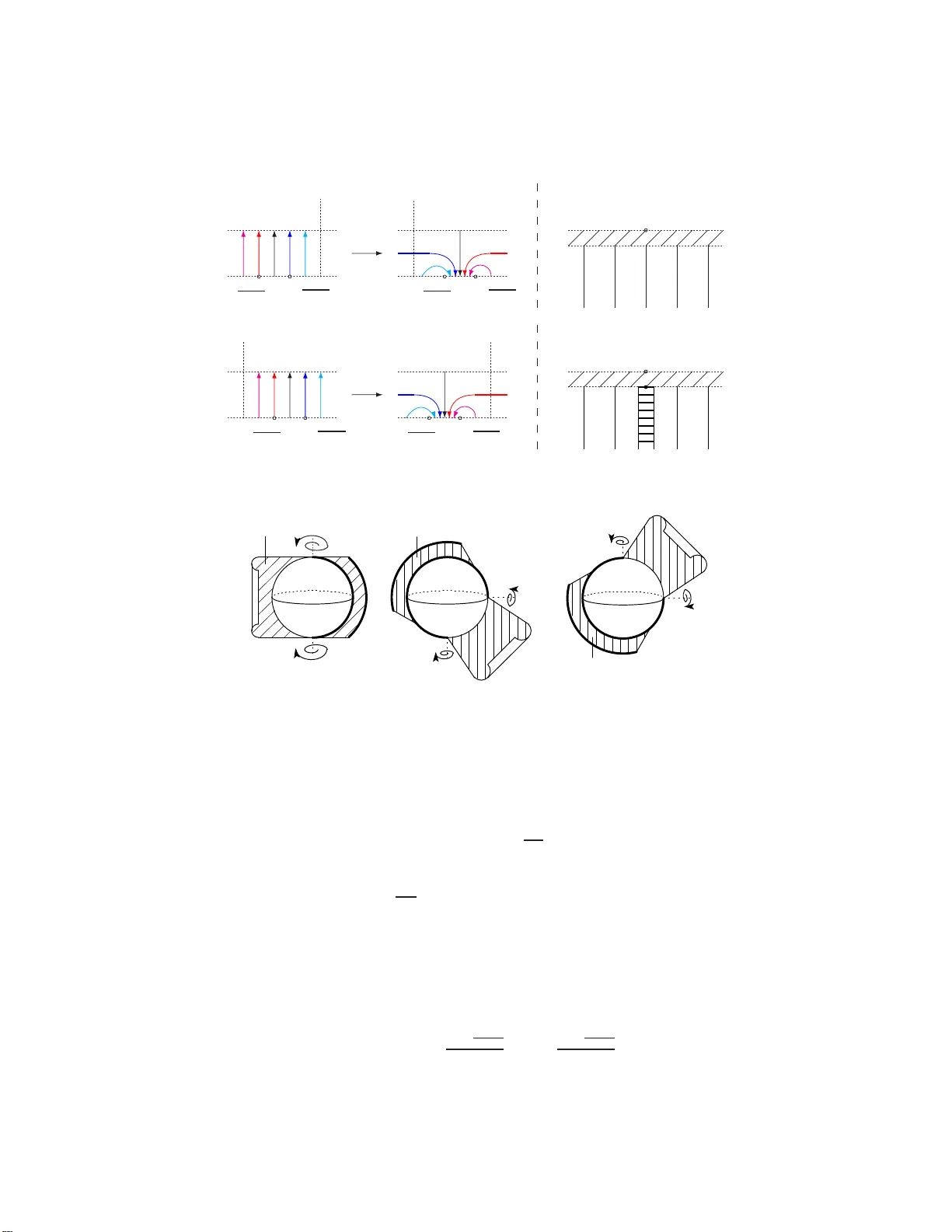
THE SP A CE OF ST ABILITY CONDITIONS F OR QUIVERS WITH TW O VER TICES T AKAHISA SHIINA Abstract. The purpose of this article is to study the space of s tabilit y condi- tions Stab( P n ) on the bounded derive d category D b ( P n ) of finite dimensional represen tations of th e quiv er P n with t wo v ertices and n parallel arrows. There is a l ocal homeomorphism Z : Stab( P n ) → C 2 . W e show that, when the n um- ber of arrows is one or t w o, Z is a co v ering map if we restrict it to the comple- men t of a li ne ar rangemen t. When the num b er of ar rows is greater than tw o, we need to remo ve unco unta bly many lines to obtain a co ve ring map. 1. Introduction T. B r idgeland introduced the notion of stability conditions on triang ulated cat- egories ([Br i07]). The idea comes from Douglas ’s work on π -stability for D-bra nes in string theory ([Dou02]). The main results of Bridgeland’s pap er ar e as follows: The set of all (lo cally finite) stability conditions Stab( T ) on a triangulated categor y T ha s a to po logy . Each connected comp o nent Σ ⊂ Stab( T ) is equipped with a lo cal homeomorphism Z to a certain top olo gical vector s pace V (Σ) ([Bri07, Theorem 1.2 ]). Moreov er Stab( T ) b eco mes a (p ossibly infinite-dimensional) manifold. 1.1. Background. It is an imp ortant problem to show simply co nnectivity of Σ, connectivity of Stab( T ), or (universal) covering ma p prop erty of the loc a l ho me- omorphism Z : Σ → V (Σ). It hav e been s tudied intensiv ely , in particular for Stab( X ) = Stab( D b (coh( X ))), the space of stability conditions on the bo unded derived ca tegory of co herent sheaves on X . F or exa mple, if X is a K3 surface, Bridgeland proved tha t there is a connected comp one nt Stab † ( X ) ⊂ Stab( X ) and a cov ering ma p π : Stab † ( X ) → P + 0 ( X ) ([Br i08, Theorem 1.1]). He prov ed also that if X is an elliptic curve, Stab( X ) is connected, the image of Z : Stab( X ) → C 2 is GL + (2 , R ) and Z is a universal cov ering map ([Bri07, Section 9 ]). E. Macr ` ı prov ed that if X is a cur ve of genus ≥ 2 , Stab( X ) also is isomor phic to ^ GL + (2 , R ), the uni- versal cover of GL + (2 , R ) ([Mac07, Theorem 2.7 ]). S. Ok ada prov ed that Stab( P 1 ) is isomo rphic to C 2 as a complex manifold ([Ok a0 6, Theorem 1.1]). The author was moved by Bridgela nd’s work on the stability conditions for Kleinian singula r ities ([Bri0 9]). Let A b e a pr epro jectiv e algebra of the ADE- graph Γ and let D = D b (mo d A ). He proved that there is a c onnected c o mpo nent Stab † ( D ) ⊂ Stab( D ) whic h is a covering space of h reg . Her e h is the Cartan subalge- bra of the simple Lie alg ebra corresp onding to Γ and h reg is the complement of roo t hyperplanes in h . T he simply connectivity of Stab † ( D ) fo llows from P . Seidel and R. Thomas [ST01] in t yp e A (see a lso [Tho06]) and C. Brav and H. Tho ma s [BT11] 1 2 T AKAHISA SHI INA π i H 1 0 ψ 1 π i H 0 0 ψ 2 π i H 2 H 0 H 1 H 2 C 0 π i Figure 1. Stab( P 1 ) / C in type D and E. The connec tivity o f Stab( D ) follows from A. Ishii, K . Ueda , and H. Uehar a [IUU10] in type A. 1.2. M otiv ation and main results. It is an imp or ta nt problem to find hy- per planes { H λ } λ ∈ Λ in V (Σ) such that the r estriction of Z to the complement V (Σ) − ∪ λ ∈ Λ H λ is a cov ering map. At first, the author thought that Z : Σ → V (Σ) was a cov ering map without restricting Σ. How ever the author found a inconsis- tency when the a uthor exa mined it for Stab( P n ), the space of s ta bilit y co nditions on the b ounded der ived categor y of finite dimensional represe n tations of a quiver P n with tw o vertices and n pa rallel arrows. In [Mac07], Macr ` ı a lready analyzed Stab( P n ); he des crib ed co or dinate neighbor- ho o ds of it, and he prov ed that it is a co nnected a nd simply connected 2-dimensiona l complex manifold ([Mac07, Theo rem 4.5]). Although he did not refer to Z , it is straightforward to se e the image of Z : Stab( P n ) → C 2 is C 2 \ { (0 , 0) } and to s ee how Z cov ers. Nevertheless we find an interesting b ehavior if we colla ps e them by C -action. The action of C on Sta b( P n ) is a part of the ^ GL + (2 , R )-action (cf. [Bri07], [Ok a 06, Definition 2.3]). The quotient space is given as a co rollar y of [Mac07]: Corollary 1.1. The quotient sp ac e Stab( P n ) / C is home omorph ic t o • C \ { y i | y ≤ 0 } if n = 1 or • C \ S k ∈ Z { x k + y i | y ≤ 0 } ∪ { x + y i | b n ≤ x ≤ c n , y < 0 } if n ≥ 2 . These ar e the 1 -dimensional c omplex manifolds given by gluing thr e e, if n = 1 , or c oun table, if n ≥ 2 , upp er half planes H k . Her e x k = log a k a k +1 for al l k ∈ Z , b n = log n − √ n 2 − 4 2 , c n = log n + √ n 2 − 4 2 , and H k ’s ar e c opies of H = { z ∈ C | I m z > 0 } . (Figur e 1 and 2.) The s equence { a k } (Definition 5.1) satisfies a − k = − a k , 0 = a 0 a 1 < a 1 a 2 < · · · < a k − 1 a k < · · · k →∞ − − − − → n − √ n 2 − 4 2 , and ∞ = a 1 a 0 > a 2 a 1 > · · · > a k a k − 1 > · · · k →∞ − − − − → n + √ n 2 − 4 2 . Note that if n = 2 then a k = k and fra ctions conv erge to 1. In the right side figures of Figur e 1 and 2, illustra ting Stab( P n ) / C , the solid vertical lines are { x k + y i } and the area ( n > 2) is { x + y i | b n ≤ x ≤ c n } . In addition, the a rea is the int ersec tio n of H k ’s. In the left side fig ures, all ψ k ’s, defined in Theo rem 4.2 and 5.4, are homeo mo rphisms on { x + y i | 0 < y < π } . It mov es a vertical line in H 0 THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 3 H 0 log a k − 1 a k log a k a k +1 0 π i ψ k H k 0 π i log a k +1 a k log a k a k − 1 ( n = 2) 0 π i H 0 H 1 H 2 · · · H − 1 H − 2 · · · H 0 log a k +1 a k log a k a k − 1 0 π i ψ − k H − k 0 π i log a k − 1 a k log a k a k +1 ( n > 2) 0 π i H 0 H 1 H 2 · · · H − 1 H − 2 · · · Figure 2. Stab( P n ) / C [0 : 1] [1 : 0] H 0 [1 : 0] [1 : 1] H 1 [1 : 1] [0 : 1] H 2 Figure 3. χ 1 to a c ur ve in H k as illustra ted; the vectors in H 0 corres p o nds to the same colore d vectors in H k by ψ k preserving the direction. Theorem 1. 2 . The lo c al home omorphism Z induc es χ n : Stab( P n ) / C → C P 1 , which • maps the “re al ax is”, { x + 0 i | x ∈ R } ⊂ H 0 , to { [1 : λ ] | λ > 0 } ⊂ C P 1 , • maps the “ π axis”, { x + π i | x ∈ R } ⊂ H 0 , to { [1 : µ ] | µ < 0 } ⊂ C P 1 , • wr aps H 0 on C P 1 exc ept [0 : 1] and [1 : 0] , • maps the r e al axis of H k to the longer ar c fr om [ a k +1 : a k ] to [ a k : a k − 1 ] , • maps the π axis of H k to the shorter ar c fr om [ a k +1 : a k ] to [ a k : a k − 1 ] , and • wr aps H k on C P 1 exc ept [ a k +1 : a k ] and [ a k : a k − 1 ] . (Figur e 3 and 4.) Mor e over the minimal subset of C P 1 which, after t he r emoval, makes χ n into a c overing map is: • { [0 : 1] , [1 : 0] , [1 : 1] } if n = 1 , • { [ k : k + 1] ( k ∈ Z ) , [1 : 1] } if n = 2 , or • n [ a k : a k +1 ] ( k ∈ Z ) , [1 : λ ] n − √ n 2 − 4 2 ≤ λ ≤ n + √ n 2 − 4 2 o if n > 2 . 4 T AKAHISA SHI INA [0 : 1] [1 : 0] H 0 H − k [ a k − 1 : a k ] [ a k : a k +1 ] H k [ a k : a k − 1 ] [ a k +1 : a k ] Figure 4. χ n Corollary 1.3. The lo c al home omorphism Z : Stab( P n ) → C 2 \ { (0 , 0 ) } is a c over- ing map if it is r estricte d to the c omplement of t hr e e lines ( n = 1 ), c oun tably many lines ( n = 2 ), or a bund le of unc ountably many lines ( n > 2 ). 1.3. O rganization of this article. In section 2, we re c a ll the notion o f stability conditions on a triangulated category , r ecall the action of ^ GL + (2 , R ), and r ecall Macr ` ı’s work for a triangula ted ca tegory generated by finitely many exceptiona l ob jects. In section 3, we recall Ma cr ` ı’s work descr ibing co o rdinate neighbo rho o ds of Sta b( P n ). In section 4 and sec tio n 5 , we see how the co o rdinate neighbor ho o ds are g lued tog ether and prov e Cor ollary 1.1. In section 6 we prov e Theo rem 1.2 and Corollar y 1.3. Ac kno wledgements. I would like to thank Dai T amaki for in tro ducing me to the sub ject and inv aluable a dvice. 2. St ability conditions In this section we assume that a tria ngulated catego r y T satisfies the following conditions. • Hom • T ( A, B ) = L k Hom k T ( A, B ) = L k Hom T ( A, B [ k ]) is a finite dimen- sional C - vector space where [ k ] is the k - fold shift functor. • T is essentially small, i.e. T is equiv alent to a ca tegory in which the class of o b jects is a set. The Grothendieck g roup o f T , K ( T ), is the quotient gro up o f the fre e ab elian group gener ated by all iso morphism classe s of ob jects in T ov er the subgr oup generated by the ele ments of the form [ A ] + [ B ] − [ C ] for each distinguished triangle A → C → B in T . 2.1. De fini tion of stabilit y conditions . A stability c ondition on T is a pair σ = ( Z, P ) of • a group homo morphism Z : K ( T ) → C a nd • full additive subc a tegories P ( φ ) of T for each φ ∈ R satisfying Br1: if φ 1 > φ 2 and A j ∈ P ( φ j ) then Hom T ( A 1 , A 2 ) = 0, Br2: P ( φ + 1) = P ( φ )[1], Br3: each nonzero ob ject has a Har der-Nar asimhan filtr ation , and Br4: if 0 6 = A ∈ P ( φ ) then Z ([ A ]) = m ( A ) e iπφ for so me m ( A ) ∈ R > 0 . THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 5 A Har der-Nara simhan filtratio n of a nonz e r o ob ject E ∈ T is a diagr am 0 = E 0 / / E 1 / / ~ ~ ⑥ ⑥ ⑥ ⑥ ⑥ ⑥ ⑥ ⑥ . . . / / E n − 1 / / E n = E { { ✈ ✈ ✈ ✈ ✈ ✈ ✈ ✈ ✈ A 1 c c A n b b such that each E j − 1 → E j → A j is a distinguished tr iangle in T , A j ∈ P ( φ j ) for all j and φ 1 > · · · > φ n . Note that for a s tability condition σ = ( Z , P ); • a Harder-Nar a simhan filtration for a nonzer o ob ject is unique up to iso- morphism, • Z is called the c entr al char ge , • nonzero ob jects in P ( φ ) are ca lle d semistable of phase φ , • simple ob jects in P ( φ ) are c alled stable , and • define φ + σ ( E ) := φ 1 and φ − σ ( E ) := φ n . A sta bility co ndition ( Z , P ) is called lo c al ly fi n ite if there exists ε > 0 such that P ( φ − ε, φ + ε ) is of finite length for each φ , that is, the catego ry is Artinian and No etherian. Le t Stab( T ) be the s et of all lo ca lly-finite stability conditio ns on T . Bridgeland defined a generalize d metr ic o n Stab( T ) as d ( σ 1 , σ 2 ) = sup 0 6 = E ∈ T | φ − σ 2 ( E ) − φ − σ 1 ( E ) | , | φ + σ 2 ( E ) − φ + σ 1 ( E ) | , log m σ 2 ( E ) m σ 1 ( E ) ∈ [0 , ∞ ] for σ 1 , σ 2 ∈ Stab( T ). Theorem 2.1. [Bri07, Theor e m 1 .2] F or e ach c onne cte d c omp onent Σ ⊂ Stab( T ) ther e ar e a line ar subsp ac e V (Σ) ⊂ Ho m Z ( K ( T ) , C ) , with a wel l-define d line ar top olo gy, and a lo c al home omorphi sm Z : Σ → V (Σ) which maps a st ability c ondi- tion ( Z, P ) to its c entr al char ge Z . According to Bridg eland, there is a r elation b etw een a stability condition a nd a heart of a b ounded t-structure on T . Befo r e reca lling it we make some de finitio ns. Definition 2.2. (1) A t- structur e on T is a full sub categ ory F , clo sed under isomorphism, satisfying; • F [1] ⊂ F and • for every ob ject X ∈ T , there is a triang le A → X → B → A [1] such that A ∈ F and B ∈ F ⊥ where F ⊥ = { B ∈ T | Hom T ( A, B ) = 0 for all A ∈ F } . (2) T he he art of a t-struc tur e F ⊂ T is the full sub catego ry A = F ∩ F ⊥ [1]. (3) A t-str uc tur e F ⊂ T is said to b e b ounde d if T = S i,j ∈ Z F [ i ] ∩ F ⊥ [ j ]. Definition 2.3. Let A ⊂ T be a full ab elian s ubca tegory . (1) T he Grothendieck g roup K ( A ) of A is the quotient group of the free ab elia n group gener ated by all isomorphism clas s es in A ov er the s ubgroup gener- ated by the elements of the for m [ A ] + [ B ] − [ C ] for each short ex act sequence 0 → A → C → B → 0 in A . (2) A stability function on A is a gro up ho momorphism Z : K ( A ) → C sa tis- fying Z ([ E ]) = m ( E ) e iπφ ( E ) where m ( E ) > 0 and 0 < φ ( E ) ≤ 1 for each nonzero ob ject E ∈ A . W e call φ ( E ) the phase of E . (3) An ob ject E ∈ A is said to be semistable if φ ( F ) ≤ φ ( E ) for each sub ob ject F ⊂ E . 6 T AKAHISA SHI INA (4) A stability function Z o n A is s a id to hav e the Har der-Nar asimhan pr op erty if for every nonzer o ob ject E ∈ A , there is a finite chain o f sub o b jects 0 = E 0 ⊂ E 1 ⊂ · · · ⊂ E n − 1 ⊂ E n = E whose facto rs F j = E j /E j − 1 are semistable ob jects with φ ( F 1 ) > φ ( F 2 ) > · · · > φ ( F n ) . Theorem 2.4. [Bri07, P rop osition 5.3] T o give a st ability c ondition on a triangu- late d c ate gory T is e quivalent to giving a b ounde d t-struct ur e on T and a stability function on its he art with the Har der-Nar asimhan pr op erty. 2.2. Actio ns on the space of stability conditi ons. Bridgeland defined a right action of the gro up ^ GL + (2 , R ), the universal cover of GL + (2 , R ), and a left a ction of Aut( T ), the gro up of exact auto equiv alences o f T , on Stab( T ). These actions commute with each other. Note that ^ GL + (2 , R ) can b e thought o f as the set of pairs ( T , f ), where f : R → R is an increas ing map with f ( φ + 1) = f ( φ ) + 1 and T ∈ GL + (2 , R ), s uch that T ( e 2 iπφ ) / | T ( e 2 iπφ ) | = e 2 iπf ( φ ) where we iden tify C and R 2 . F or ( Z, P ) ∈ Stab( T ), ( Z ′ , P ′ ) = ( Z, P ) · ( T , f ) is defined as Z ′ = T − 1 ◦ Z and P ′ ( φ ) = P ( f ( φ )). Next, note that a n e lement G ∈ Aut( T ) induces an auto morphism g of K ( T ). F or σ = ( Z, P ), G · σ is defined as ( Z ◦ g − 1 , P ′′ ) wher e P ′′ ( φ ) = G ( P ( φ )). The action of C on Stab( T ) , whic h is a pa rt o f ^ GL + (2 , R )-action, is descr ibed in Ok ada [Ok a06, Definition 2.3]; z · ( Z, P ) = ( Z ′ , P ′ ) wher e Z ′ ( E ) = e z Z ( E ) and P ′ ( φ ) = P ( φ − b π ) for z = a + bi ∈ C and ( Z , P ) ∈ Stab( T ). 2.3. Stabil it y conditions and exceptional ob jects. Macr ` ı discussed the spa ces of stability conditions on a triang ula ted category T generated by finitely many exceptional ob jects in [Mac07]. Definition 2.5. (1) An ob ject E in T is called exc eptional if Hom k T ( E , E ) = ( C ( k = 0) 0 (otherwise) . (2) A sequence ( E 1 , E 2 , . . . , E n ) is ca lle d an exc eptional c ol le ct ion if each E i is exceptiona l and Hom k T ( E i , E j ) = 0 for all k and i > j . In particular , ( E 1 , E 2 ), consisting o f t wo exceptional ob jects, is called an exc eptional p air . (3) An exceptional collection is calle d c omplete if { E i } generates T b y shifts and extensions. (4) An exc e ptional collec tion is called Ext-exc eptional if Hom ≤ 0 ( E i , E j ) = 0 for all i 6 = j . Definition 2.6. (1) L et E and F b e exceptio nal o b jects. W e define L E F and R F E b y the following distinguished triangles: L E F − → Hom • ( E , F ) ⊗ E − → F, E − → Hom • ( E , F ) ∗ ⊗ F − → R F E . W e call L E F the left mutation of F b y E and R F E the right mu tation of E b y F . THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 7 (2) L et E = ( E 1 , . . . , E n ) b e an exceptional collection. W e define L i E and R i E as the sequences L i E = ( E 1 , . . . , E i − 1 , L E i E i +1 , E i , E i +2 , . . . , E n ) , R i E = ( E 1 , . . . , E i − 1 , E i +1 , R E i +1 E i , E i +2 , . . . , E n ) . W e call L i E (r esp. R i E ) t he left (r esp. right) mutation o f E . Prop ositi o n 2. 7. ( S e e for ex ample [Bon89] .) (1) A mu tation of an exc eptional c ol le ction is also an exc eptional c ol le ction. (2) I f an exc eptional c ol le ction gener ates T then its mutation also gener ates T . (3) The fol lowing r elations hold: L i R i = R i L i = id , R i R i +1 R i = R i +1 R i R i +1 , and L i L i +1 L i = L i +1 L i L i +1 . F or an exceptiona l collection ( E 1 , . . . , E n ), w e denote b y h E 1 , . . . , E n i the sma ll- est extension- closed full sub catego ry of T containing { E 1 , . . . , E n } . Lemma 2.8. [Mac07, Lemma 3.14 ] L et ( E 1 , . . . , E n ) b e a c omplete Ext-exc eptional c ol le ct ion on T . Then h E 1 , . . . , E n i is the he art of a b ounde d t-stru ctur e on T . Lemma 2.9. [Mac07, Lemma 3.16 ] L et ( E 1 , . . . , E n ) b e a c omplete Ext-exc eptional c ol le ct ion on T and let ( Z, P ) b e a stability c ondition on T . Assume E 1 , . . . , E n ∈ P ((0 , 1]) . Then h E 1 , . . . , E n i = P ((0 , 1 ]) and E j is stable, for al l j = 1 , . . . , n . Given a complete exceptional collection ( E 1 , . . . , E n ) on T , the Grothendieck group K ( T ) is a free a be lia n gro up of finite rank iso mo rphic to Z ⊕ n generated by the isomorphism clas ses [ E i ]. Macr ` ı show ed how to constr uct stability co nditions from an exceptional collection. Lemma 2.1 0 . [Mac0 7] L et E = ( E 1 , . . . , E n ) b e a c omplete exc eptional c ol le ction on T . A stability c ondition, as a p air ( Z, A ) of a he art A of a b ounde d t-struct ur e and a stability fun ction Z on A , is c onst ructe d by the fol lowing steps: • Cho ose inte gers p 1 , . . . , p n such that ( E 1 [ p 1 ] , . . . , E n [ p n ]) is Ext-exc eptional. • Denote Q p := h E 1 [ p 1 ] , . . . , E n [ p n ] i , which is the he art of a b ounde d t- structur e. (L emma 2.8 .) • Pick n p oints z 1 , . . . , z n in H = { re iπφ ∈ C | r > 0 , 0 < φ ≤ 1 } and define a homomorph ism Z p : K ( Q p ) → C as Z p ( E i [ p i ]) = z i . Then Z p is a stability function with the Har der-Nar asimhan pr op erty. • The p air ( Z p , Q p ) is the s t ability c ondition. (The or em 2.4 .) Let Θ E be the subset of Stab( T ) consisting of all stability conditions obtained by Lemma 2 .1 0, up to the a ction of ^ GL + (2 , R ). Lemma 2.9 implies the following immediately . Lemma 2 . 11. [Mac07] L et E = ( E 1 , . . . , E n ) b e a c omplete exc eptional c ol le ction. Then E i ’s ar e stable in e ach stability c ondition of Θ E . In general, Θ E is not the subspace consisting of s tability conditio ns in which E i ’s are stable. Lemma 2.12. [Mac07, Lemma 3.19.] The subsp ac e Θ E ⊂ Stab( T ) is an op en, c onne cte d and simply c onne ct e d n -dimensional su bmanifold. 8 T AKAHISA SHI INA It is worth noting how Macr ` ı proved Lemma 2.12. F or an exceptional co llection F s = ( F 1 , . . . , F s ) ( s > 1), we define, for i < j , k F s i,j := ( + ∞ , if Hom k ( F i , F j ) = 0 for all k , min n k Hom k ( F i , F j ) 6 = 0 o , otherwise. Then define α F s s = 0, and for i < s , α F s i := min j >i n k F s i,j + α F s j o − ( s − i − 1 ) inductively . Cons ide r R n with co ordinates φ 1 , . . . , φ n . Let F s := ( E ℓ 1 , . . . , E ℓ s ) ⊂ ( E 1 , . . . , E n ), s > 1. Define R F s on R n as the r elation φ ℓ 1 < φ ℓ s + α F s 1 . Finally define C E := ( m 1 , . . . , m n , φ 1 , . . . , φ n ) ∈ R 2 n m i > 0 for all i and R F s for all F s ⊂ E , s > 1 . Then C E is homeomorphic to Θ E via the ma p ρ : Θ E → C E defined by m i ( ρ ( σ )) := | Z ( E i ) | and φ i ( ρ ( σ )) := φ σ ( E i ). See [Mac07] for the pr o of that ρ is a homeo - morphism and that C E is an op en, co nnected and simply co nnected n - dimensional manifold. 3. Quivers with two ver tices A quiver Q co nsists of the following data ; a set Q 0 of v ertices, a set Q 1 of arrows, a map s : Q 1 → Q 0 called the so urce map, and a map t : Q 1 → Q 0 called the targe t map. W e write α : a → b if s ( α ) = a and t ( α ) = b for α ∈ Q 1 . A finite dimensional r epr esentation V on Q is a family V = { V a , f α } such that V a is a finite dimensional C -vector spac e for each a ∈ Q 0 and f α : V a → V b is a linear map for each arr ow α : a → b . A morphism F : V → V ′ betw een repres ent ations is a family o f linear maps F = { F a : V a → V ′ a } suc h that f ′ α ◦ F a = F b ◦ f α for each α : a → b . W e denote by rep( Q ) the ab elian categor y consisting of a ll finite dimensional representations on Q a nd all mo r phisms; and denote by D ( Q ) = D b (rep( Q )) the b ounded der ived category of rep( Q ). In this a rticle, we consider the quiver with finite vertices, finite ar r ows, no lo o ps, no oriented cycles , and no relations o n arr ows. F o r suc h quiv er, following results are well-known: • Let E a ∈ r e p( Q ) b e a repre s ent ation assig ning C to the vertex a and 0 to other vertices. Then { E a } a ∈ Q 0 is a complete se t of simple ob jects in rep( Q ). • Hom( E a , E b ) = C if a = b and = 0 if a 6 = b . • Ext 1 ( E a , E b ) = C n if there exis t n arrows from a to b . • Denote by E a ∈ D ( Q ) the complex assig ning E a to deg ree 0 and 0 to other degree. Then E a is an exceptiona l ob ject for ea ch a ∈ Q 0 . • K ( D ( Q )) ∼ = K (re p( Q )) is the fr ee ab elian group genera ted by { E a } a ∈ Q 0 . • rep( Q ) is a hereditary ab elian categor y . Hence each X ∈ D ( Q ) is iso mor- phic to its co homology rega r ded as a complex with zero differential. (e.g. [Kra07].) By ordering in a suitable manner, the sequence ( E a ) a ∈ Q 0 bec omes a complete exceptional collection on D ( Q ). Hence we apply r esults in Subsection 2.3 to D ( Q ). THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 9 In fact, Macr ` ı studied Stab( P n ) = Stab( D ( P n )) where P n is the quiver as follows: P n : 0 • / / / / . . . / / 1 • Let S 0 and S 1 be exceptional ob jects in D ( P n ) such that S 0 [1] and S 1 are simple ob jects of rep( P n ). According to [Ma c07, CB92, Rin94], if we define S k := ( L S k +1 S k +2 ( k < 0) R S k − 1 S k − 2 ( k ≥ 2) inductively , then { S k } is the complete set of exceptional ob jects in D ( P n ), up to shifts and isomorphisms. Each adjacent pair ( S k , S k +1 ) is an exceptio nal pair. Moreov er ea ch ( S k , S k +1 ) is the right mutation of ( S k − 1 , S k ). Note that, if n = 1, there are only three exceptio nal ob jects up to shifts and isomorphisms, i.e. S 0 , S 1 , and S 2 , up to shifts and isomorphisms. F urther, the right mutation satisfies: R 1 R 1 R 1 ( S 0 , S 1 ) = ( S 0 [1] , S 1 [1]). Lemma 3.1. [Mac0 7, Lemma 4.1] A ssume that n > 1 , if i < j then in D ( P n ) • Hom k ( S i , S j ) 6 = 0 only if k = 0 ; • Hom k ( S j , S i ) 6 = 0 only if k = 1 . In p articular t he p air ( S k , S k +1 ) is a c omplete exc eptional p air. Lemma 3.2. [Ma c07, Lemma 4.2] In every st ability c ondition on D ( P n ) t her e exists a stable exc eptional p air ( E , F ) . Let Θ k , k ∈ Z , be a subset of Stab( P n ) c o nsisting of a ll stability conditions made from ( S k , S k +1 ) by Lemma 2 .10. Lemma 3.3. Θ k c oincides with the su bset of Stab( P n ) c onsisting of al l stability c onditions in which S k and S k +1 ar e stable. Pr o of. See [Ma c07, Section 4]. Prop ositi o n 3.4. If n > 1 , Stab( P n ) = S k ∈ Z Θ k . In additio n, Stab( P 1 ) = Θ 0 ∪ Θ 1 ∪ Θ 2 . Pr o of. It follows immedia tely fr om Lemma 3.1, 3 .2 and 3.3. Prop ositi o n 3. 5. [Ma c07, Pr op osition 4.4] F or al l inte gers k 6 = h we have Θ k ∩ Θ h = O − 1 wher e O − 1 is the ^ GL + (2 , R ) -orbit of the stability c ondition σ − 1 = ( Z − 1 , P − 1 ) given by Z − 1 ( S 0 [1]) = − 1 and Z − 1 ( S 1 ) = 1 + i . Applying the pro of of Lemma 2 .12, we hav e Θ k ∼ = C k := { ( m 1 , m 2 , φ 1 , φ 2 ) ∈ R 4 | m i > 0 and φ 1 < φ 2 } . Since it is connected and simply connec ted, Stab( P n ) is co nnected and simply connected by using of the Seifert-v an Ka mpen theor em. Theorem 3. 6. [Mac07, Theorem 4.5] Sta b( P n ) is a c onne ct e d and simply c onn e cte d 2 -dimensional c omplex m anifold. T o analyze how Θ k ’s are glued to e ach o ther, we change co ordina tes of C k . Lemma 3.7. C k ∼ = C × H wher e H = { z ∈ C | I m z > 0 } , the upp er half plane. 10 T AKAHISA SHI INA Pr o of. Define ζ k ( m 1 , m 2 , φ 1 , φ 2 ) := log( m 1 ) + iπ φ 1 , lo g m 2 m 1 + iπ ( φ 2 − φ 1 ) . It is clear that ζ k : C k → C × H is a homeomor phism. Let us note the cor resp ondence b etw e e n elements in Θ k and C × H . F o r z = a + bi ∈ C a nd w = c + di ∈ H , the co rresp onding s tability c ondition σ = ( Z, P ) ∈ Θ k is given by (3.1) Z ( S k ) = e z , Z ( S k +1 ) = e z + w , φ σ ( S k ) = b π and φ σ ( S k +1 ) = b + d π . Conv ersely , for σ = ( Z, P ) ∈ Θ k , z = log | Z ( S k ) | + iπ φ σ ( S k ) and w = log Z ( S k +1 ) Z ( S k ) + iπ ( φ σ ( S k +1 ) − φ σ ( S k )) . Lemma 3.8. The action of C on Stab( P n ) , describ e d by O kada [Ok a 06] (se e Sub- se ct ion 2.2), pr eserves Θ k for al l k . Pr o of. The C - action pr eserves stable ob jects. The C - action o n C × H via homeomorphism Θ k ∼ = C × H is given by (3.2) z ′ · ( z , w ) = ( z ′ + z , w ) . Therefore the orbit space is homeomo rphic to H . 4. The case of one arro w In this sectio n, we analyze Sta b( P 1 ). Section 3 s ays Stab( P 1 ) = Θ 0 ∪ Θ 1 ∪ Θ 2 where Θ k are related to ( S 0 , S 1 ), ( S 1 , S 2 ), and ( S 2 , S 0 [1]), resp ectively . The inter- section O − 1 = Θ k ∩ Θ h (for e ach k 6 = h ) consists o f all stability conditions in whic h S 0 , S 1 and S 2 are sta ble. F or each σ = ( Z, P ) ∈ O − 1 , since ther e is a distinguished triangle S 0 − → S 1 − → S 2 − → S 0 [1] , axioms of the stability condition induce (4.1) Z ( S 1 ) = Z ( S 0 ) + Z ( S 2 ) and (4.2) φ σ ( S 0 ) < φ σ ( S 1 ) < φ σ ( S 2 ) < φ σ ( S 0 ) + 1 . Put Θ k ∼ = C k × H k ( k = 0 , 1 , 2) wher e C k and H k are copies of C and H (Lemma 3.7). Now we analyze how C k × H k are glued each other. Theorem 4.1. Put H k := { w ∈ H | 0 < I m w < π } ( k = 0 , 1 , 2) . THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 11 Define ϕ k : C 0 × H 0 → C k × H k ( k = 1 , 2 ) as ϕ 1 ( z , w ) := z + w, lo g e w − 1 e w and ϕ 2 ( z , w ) := z + log( e w − 1) , log 1 1 − e w . Then Stab( P 1 ) ∼ = 2 [ k =0 C k × H k ! ∼ wher e t he e quivalenc e r elation is gener ate d by ( z , w ) ∼ ϕ k ( z , w ) for e ach ( z , w ) ∈ C 0 × H 0 and k . Pr o of. Becaus e o f the inequality (4 .2), the intersection O − 1 ⊂ Θ k corres p o nds to C k × H k for each k . Let ( Z , P ) ∈ O − 1 and ( z k , w k ) ∈ C k × H k ( k = 0, 1, 2 ) be elements co rresp onding to e ach other. The equations (3 .1) in Section 3 imply tha t e z 1 = Z ( S 1 ) = e z 0 + w 0 and e z 1 + w 1 = Z ( S 2 ) = e z 0 + w 0 − e z 0 and e z 2 = Z ( S 2 ) = e z 0 + w 0 − e z 0 and e z 2 + w 2 = Z ( S 0 [1]) = − e z 0 (see Figure 5). Hence ϕ k are defined. It is clear that ϕ k are homeomorphisms. Z ( S 0 ) = e z 0 Z ( S 1 ) = e z 0 + w 0 Z ( S 2 ) Z ( S 0 [1]) Θ 0 e z 1 e z 1 + w 1 Θ 1 e z 2 e z 2 + w 2 Θ 2 Figure 5. Theorem 4.2. Defin e ψ k : H 0 → H k ( k = 1 , 2 ) as ψ 1 ( w ) := log e w − 1 e w and ψ 2 ( w ) := lo g 1 1 − e w and define C 1 := 2 [ k =0 H k ! ∼ wher e the e quivalenc e r elation is gener ate d by w ∼ ψ k ( w ) for e ach w ∈ H 0 and k . Then Stab( P 1 ) / C ∼ = C 1 . (Se e Figur e 1 and Cor ol lary 1.1.) Pr o of. The pr o of is immediately fr o m Theorem 4.1 a nd the C -a c tio n o n C k × H k , describ ed in (3.2), Section 3. 12 T AKAHISA SHI INA 5. The case of mul tiple ar r ows In this s e ction, we analyze Stab( P n ) for n ≥ 2. Section 3 says that, in D ( P n ), there is a complete set of exceptional ob jects { . . . , S − 2 , S − 1 , S 0 , S 1 , S 2 , . . . } where ea ch adjacent pa ir ( S k , S k +1 ) is the complete strong exceptiona l pair and is the r ight mutation of ( S k − 1 , S k ). Definition 5.1. Let n ≥ 2. Define a sequence of rea l num ber s { a k } k ∈ Z as • a 0 = 0, a 1 = 1, a k = na k − 1 − a k − 2 for k ≥ 2, and • a − ℓ = − a ℓ for ℓ ≥ 1. Lemma 5.2. In D ( P n ) , ther e is a distinguishe d triangle S k − 2 − → S ⊕ n k − 1 − → S k − → S k − 2 [1] . Mor e over, for a gr oup homomorphi sm Z : K ( P n ) → C , the fol lowing e quation hold: (5.1) Z ( S k ) = a k Z ( S 1 ) − a k − 1 Z ( S 0 ) Pr o of. It is well-known that Hom j D b ( P n ) ( S 0 , S 1 ) ∼ = ( C n ( j = 0) 0 (otherwise) . By the definition of the right mutation, there is a triang le S 0 − → Hom • D b ( P n ) ( S 0 , S 1 ) ∗ ⊗ S 1 = S ⊕ n 1 − → R S 1 S 0 = S 2 . By applying Hom j D ( P n ) ( S 1 , ), we obtain Hom j D ( P n ) ( S 1 , S 2 ) ∼ = ( C n ( j = 0) 0 (otherwise) . Assume tha t the following condition hold: Hom j D ( P n ) ( S k − 2 , S k − 1 ) ∼ = ( C n ( j = 0) 0 (otherwise) The definition of the right m utation induces the triang le S k − 2 − → Hom • D b ( P n ) ( S k − 2 , S k − 1 ) ∗ ⊗ S k − 1 = S ⊕ n k − 1 − → R S k − 1 S k − 2 = S k . By applying Hom j D ( P n ) ( S k − 1 , ), we o bta in Hom j D ( P n ) ( S k − 1 , S k ) ∼ = ( C n ( j = 0) 0 (otherwise) . By induction, we obta in the triangle , which we wan t, for k ≥ 2. F or a gr oup homomorphism Z : K ( P n ) → C , the triangle induces Z ( S k ) = nZ ( S k − 1 ) − Z ( S k − 2 ) . By induction, we obtain the equation (5.1) for k ≥ 2. T o prov e Lemma for k < 0, it is enough to do similar, using the definition of the left mutation. THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 13 The s equence { a k } k ≥ 0 is describ ed as follows; if n = 2, a 0 = 0 , a 1 = 1 , a 2 = 2 , . . . , a k = k , . . . , and if n > 2, a 0 = 0 , a 1 = 1 , a 2 = n, a 3 = n 2 − 1 , . . . , a k = 1 √ n 2 − 4 n + √ n 2 − 4 2 ! k − n − √ n 2 − 4 2 ! k , . . . The fractiona l sequences n a k +1 a k o and n a k a k +1 o are c o nv ergent sequences: a 2 a 1 > a 3 a 2 > · · · > a k a k − 1 > a k +1 a k > · · · k →∞ − − − − → n + √ n 2 − 4 2 a 1 a 2 < a 2 a 3 < · · · < a k − 1 a k < a k a k +1 < · · · k →∞ − − − − → n − √ n 2 − 4 2 (5.2) W e now ready to a nalyze how Θ k ’s are glued each other . As we saw in Section 3, the spa ce of stability conditions is a union of Θ k ’s: Stab( P n ) ∼ = [ k ∈ Z Θ k , where each Θ k is the s ubset co nsisting of all s ta bilit y co nditions in whic h S k and S k +1 are sta ble. Θ k is homeomorphic to C k × H k where C k and H k are co pies o f C and H resp ectively . The intersection O − 1 = Θ k ∩ Θ h (for all k 6 = h ) is the subset consisting of all stability conditions in which S k are s table for all k . Theorem 5.3. Defin e ϕ k : C 0 × H 0 → C k × H k as (5.3) ϕ k ( z , w ) := z + log( a k e w − a k − 1 ) , lo g a k +1 e w − a k a k e w − a k − 1 for e ach k . Then Stab( P n ) ∼ = [ k ∈ Z C k × H k ! ∼ wher e the e quivalenc e r elation is gener ate d by ( z , w ) ∼ ϕ k ( z , w ) for al l ( z , w ) ∈ C 0 × H 0 and k . Her e, H k = { w ∈ H | 0 < I m w < 1 } . Pr o of. It is clear that O − 1 corres p o nds to C k × H k for each k (c.f. Lemma 5.2). Let ( z , w ) ∈ C 0 × H 0 and ( z ′ , w ′ ) ∈ C k × H k be elements c orresp o nding to ( Z, P ) ∈ O − 1 . F ro m (3.1) in Section 3, we have Z ( S 0 ) = e z , Z ( S 1 ) = e z + w , Z ( S k ) = e z ′ , and Z ( S k +1 ) = e z ′ + w ′ . These equations and (5.1) in L e mma 5 .2 imply e z ′ = a k e z + w − a k − 1 e z and e w ′ = a k +1 e z + w − a k e z a k e z + w − a k − 1 e z . Hence ϕ k are defined. It is clear that ϕ k are homeomo rphisms. Theorem 5.4. Defin e ψ k : H 0 → H k as ψ k ( w ) := lo g a k +1 e w − a k a k e w − a k − 1 14 T AKAHISA SHI INA for e ach k and define C n := [ k ∈ Z H k ! ∼ wher e the e quivalenc e r elation is gener ate d by w ∼ ψ k ( w ) for e ach w ∈ H 0 and k . Then Stab( P n ) / C ∼ = C n . (Se e Figur e 2 and Cor ol lary 1.1.) Pr o of. The pr o of is immediately fr o m Theorem 5.3 a nd the C -a c tio n o n C k × H k , describ ed in (3.2), Section 3. 6. Proof of main theorems In this section we study the cov ering map prop erty of the lo cal homeomorphism Z : Stab( P n ) → Hom Z ( K ( P n ) , C ). Note that, a s we mentioned in Sectio n 3, the Grothendieck gro up K ( P n ) is a free abelia n group gener ated by the isomorphis m classes of simple ob jects. Thus w e have K ( P n ) ∼ = Z h [ S 0 ] , [ S 1 ] i . It is clear that Hom Z ( K ( P n ) , C ) ∼ = C 2 by mapping Z to ( Z ( S 0 ) , Z ( S 1 )). Lemma 6.1. The image of Z : Stab( P n ) → Hom Z ( K ( P n ) , C ) is home omorphic to C 2 \ { (0 , 0) } . Pr o of. It is eno ugh to define a stability function Z o n h S k [ p k ] , S k +1 [ p k +1 ] i , a heart generated by an Ext-ex ceptional pair, such that Z ( S i ) = z i ( i = 0 , 1) for each ( z 0 , z 1 ) ∈ C 2 \ { (0 , 0) } . Suppo se z 0 6 = 0 and z 1 6 = 0. W e define Z on h S 0 [ p 0 ] , S 1 [ p 1 ] i as follows: W e c ho ose ǫ i ∈ { 0 , 1 } ( i = 0 , 1) suc h that ( − 1) ǫ i z i are b oth in H = { re iπφ | r > 0 , 0 < φ ≤ 1 } . W e define p 0 = 2 − ǫ 0 , p 1 = − ǫ 1 , and Z ( S i [ p i ]) = ( − 1 ) ǫ i z i . It is e a sy to see that ( S 0 [ p 0 ] , S 1 [ p 1 ]) is an Ext-exce ptio nal pair a nd Z ( S i ) = z i ( i = 0 , 1). Suppo se z 0 = 0 and z 1 6 = 0. W e define Z on h S 1 [ p 1 ] , S 2 [ p 2 ] i as follows: Cho ose an ǫ ∈ { 0 , 1 } s uch that ( − 1) ǫ z 1 is in H . W e define p 1 = 2 − ǫ a nd p 2 = − ǫ , and define Z ( S 1 [ p 1 ]) = ( − 1) ǫ z 1 and Z ( S 2 [ p 2 ]) = ( − 1) ǫ nz 1 . Suppo se z 0 6 = 0 a nd z 1 = 0. W e can define Z o n h S − 1 [ p − 1 ] , S 0 [ p 0 ] i as follows: Cho ose an ǫ ∈ { 0 , 1 } such that ( − 1) ǫ z 0 is in H . W e define p − 1 = 2 − ǫ and p 0 = − ǫ , and define Z ( S − 1 [ p − 1 ]) = ( − 1) ǫ nz 0 and Z ( S 0 [ p 0 ]) = ( − 1) ǫ z 0 . Since there a re triangles S 0 → S ⊕ n 1 → S 2 and S − 1 → S ⊕ n 0 → S 1 , it is also easy to see that Z ( S 0 ) = z 0 and Z ( S 1 ) = z 1 . Let g k be a map defined in the diag ram: Θ k f ∼ = / / Z C k × H k g k Hom Z ( K ( P n ) , C ) h ∼ = / / C 2 The following equalities are easy to see: g k ( z , w ) = a k e z + w − a k +1 e z a k − 1 a k +1 − a 2 k , a k − 1 e z + w − a k e z a k − 1 a k +1 − a 2 k g k ( z ′ + z , w ) = e z ′ · g k ( z , w ) ( g k commutes with C -a ctions.) g k ◦ ϕ k ( z , w ) = ( e z , e z + w ) THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 15 Therefore the diagr am C exp / / S k ∈ Z C k × H k / ∼ g / / S k ∈ Z H k / ∼ χ n C × / / C 2 \ { (0 , 0) } π / / C P 1 is commut ative and bo th rows are principal fib er bundles. This shows the theorem: Theorem 6.2. We obtain t he c ommutative diagr am C exp / / Stab( P n ) Z / / C n χ n C × / / C 2 \ { (0 , 0) } π / / C P 1 wher e b oth r ows ar e princip al fib er bund les. Before pr oving ma in theorem, we describ e χ n . The comp osition of g k and π is π ◦ g k ( z , w ) = a k e z + w − a k +1 e z a k − 1 a k +1 − a 2 k : a k − 1 e z + w − a k e z a k − 1 a k +1 − a 2 k for ( z , w ) ∈ C k × H k . Hence χ n ( w ) = [ a k e w − a k +1 : a k − 1 e w − a k ] for w ∈ H k . Note that χ n ( w ) = [1 : e w ] if w ∈ H 0 . Pr o of of The or em 1.2. n = 1. Note tha t g 0 ( z 0 , w 0 ) = ( e z 0 , e z 0 + w 0 ) g 1 ( z 1 , w 1 ) = ( e z 1 − e z 1 + w 1 , e z 1 ) g 2 ( z 2 , w 2 ) = ( − e z 2 + w 2 , e z 2 − e z 2 + w 2 ) where g k : C k × H k → C 2 . Hence χ 1 ( w ) = [1 : e w ] (if w ∈ H 0 ) [1 − e w : 1] (if w ∈ H 1 ) [ e w : e w − 1] (if w ∈ H 2 ) . The pro jective sp ecial linear group PSL(2 , C ) a c ts on C P 1 . Let G 1 = 0 1 − 1 1 ∈ PSL(2 , C ), of which order is 3. It is clear tha t G 1 · [1 : e w ] = [ e w : e w − 1] and G 2 1 · [1 : e w ] = [1 − e w : 1] , that is χ 1 ( H 2 ) = G 1 · χ 1 ( H 0 ) a nd χ 1 ( H 1 ) = G 2 1 · χ 1 ( H 0 ). It is also c lear that ( G 1 · [1 : 0] = [0 : 1] G 1 · [0 : 1] = [1 : 1] and ( G 2 1 · [1 : 0] = [1 : 1] G 2 1 · [0 : 1] = [1 : 0] . Therefore χ 1 wraps each upp er half plane H k on C P 1 such that • wraps H 0 on C P 1 around po int s [0 : 1] and [1 : 0], • wraps H 1 on C P 1 around po int s [1 : 1] and [1 : 0], and • wraps H 2 on C P 1 around po int s [1 : 1] and [0 : 1]. 16 T AKAHISA SHI INA See Figure 3 for detail. Moreover it is immediately follows that χ 1 is a covering map if it is r estricted to the inv erse image of (6.1) C P 1 = C P 1 \ { [1 : 0] , [0 : 1] , [1 : 1] } . n = 2. Since a k = k , χ 2 ( w ) = [ ke w − ( k + 1) : ( k − 1) e w − k ] if w ∈ H k . Let G 2 = 0 1 − 1 2 ∈ PSL(2 , C ), the power o f which is G k 2 = − k + 1 k − k k + 1 for ea ch k ∈ Z . It is c le ar that G − k 2 · [1 : e w ] = [( k + 1) − k e w : k + ( − k + 1) e w ] = [ k e w − ( k + 1) : ( k − 1) e w − k ] , that is χ 2 ( H k ) = G − k 2 · χ 2 ( H 0 ). It is also clear that ( G − k 2 · [1 : 0] = [ k + 1 : k ] and G − k 2 · [0 : 1] = [ − k : − k + 1] = [ k : k − 1] . Therefore χ 2 wraps • H 0 on C P 1 around p oints [0 : 1] a nd [1 : 0] a nd • H k on C P 1 around po int s [ k : k − 1] and [ k + 1 : k ]. (Figure 4.) Note that • lim k →∞ [ k + 1 : k ] = lim k →∞ [ k : k + 1] = [1 : 1] and • [1 : 1] is the fixed p oint. It is immediately that χ 2 is a cov ering map if it is restr ic ted to (6.2) C P 2 = C P 1 \ { [1 : 1] , [ k : k + 1] | k ∈ Z } . n > 2. Let G n = 0 1 − 1 n ∈ PSL(2 , C ), the power of which is G k n = − a k − 1 a k − a k a k +1 for all k ∈ Z . It is clea r that G − k n · [1 : e w ] = [ a k e w − a k +1 : a k − 1 e w − a k ] , that is χ n ( H k ) = G − k n · χ n ( H 0 ). It is also clear that ( G − k n · [1 : 0] = [ a k +1 : a k ] and G − k n · [0 : 1] = [ a k : a k − 1 ] . Therefore χ n wraps • H 0 on C P 1 around p oints [0 : 1] a nd [1 : 0] a nd • H k on C P 1 around po int s [ a k : a k − 1 ] a nd [ a k +1 : a k ]. (Figure 4.) Note that, from (5 .2 ), • lim k →∞ [ a k +1 : a k ] = " 1 : n − √ n 2 − 4 2 # , THE SP A CE OF ST ABILITY CONDITIONS FOR QUIVE RS WITH TWO VER TICES 17 • lim k →∞ [ a k : a k +1 ] = " 1 : n + √ n 2 − 4 2 # , • " 1 : n ± √ n 2 − 4 2 # are the fixed p oints, and • G n preserves the a rc ( [1 : λ ] n − √ n 2 − 4 2 ≤ λ ≤ n + √ n 2 − 4 2 ) . Let α = [1 : λ ] in the a r c and let U b e any neighborho o d of α in C P 1 . Ther e is the connected compo nent V ⊂ χ − 1 n ( U ) suc h that V ∈ H 0 and V is the neighbor- ho o d of lo g λ in the bo undary of H 0 . The ab ove notations show the χ n | V is no t homeomorphism. Though χ n is a covering map if it is restricted to (6.3) C P n = C P 1 \ [ a k : a k +1 ] ( k ∈ Z ) , arc fr om 1 : n − √ n 2 − 4 2 to 1 : n + √ n 2 − 4 2 Pr o of of Cor ol lary 1.3. This is a cor ollary to Theor em 1.2. The inv erse images of (6.1), (6.2), and (6.3) v ia π : C 2 \ { (0 , 0) } → C P 1 are g iven as follows: π − 1 ( C P 1 ) = C 2 \ { z 1 = 0 } ∪ { z 2 = 0 } ∪ { z 1 = z 2 } , π − 1 ( C P 2 ) = C 2 \ { z 2 = z 1 } ∪ { k z 2 = ( k + 1) z 1 | k ∈ Z } , π − 1 ( C P n ) = C 2 \ { a k z 2 = a k +1 z 1 | k ∈ Z } ∪ ( z 2 = λz 1 λ ∈ R , n − √ n 2 − 4 2 ≤ λ ≤ n + √ n 2 − 4 2 ) . Then the map Z : Stab( P n ) → C 2 is a cov ering map if it is restr icted to each o f these subspace s. References [Bon89] A. I. Bondal. Represent ations of asso ciativ e algebras and coherent shea ves. Izv. Akad. Nauk SSSR Se r. Mat. , 53(1):25–44, 1989. [Bri07] T om Bridgeland. Stabilit y conditions on triangulated categories. Ann. of Math. (2) , 166(2):317 –345, 2007. [Bri08] T om Br idgeland. Stability conditions on K 3 surf aces. Duke Math. J. , 141(2):241–291, 2008. [Bri09] T om Bridgeland. Stability conditions and Kleinian singularities. Int. Math. R es. Not. IMRN , (21):4142 –4157, 2009. [BT11] Chri stopher Br a v and Hugh Thomas. Brai d groups and Kl einian singularities. Math. Ann. , 351(4):1005–1017 , 2011. [CB92] Will iam Cr awley -Bo evey . Exceptional sequenc es of represent ations of quivers. In Pr o- c e e dings of t he Sixt h International Confer e nc e on R epr esent ations of Algebr as (Ottawa, ON, 1992) , volume 14 of Carleton-Ott awa Math. L e ctur e Note Ser. , page 7, Otta wa, ON, 1992. Carleton Univ. [Dou02] M ich ael R. Douglas. Dirichlet branes, homological mi r ror symmetry , and stability . In Pr o c e ed ings of the International Congr ess of Mathematicians, Vol. III (Beij i ng, 2002) , pages 395–408 , Beiji ng, 2002. Higher Ed. Press. [IUU10] A kira Ishii, Kazushi Ueda, and Hokuto Uehara. Stabilit y conditions on A n -singularities. J. Differ ential Ge om. , 84(1):87–126, 2010. 18 T AKAHISA SHI INA [Kra07] Henning Krause. Derived categories, resolutions, and brown representa bility . In Inter- actions b etwe en homotop y the ory and algebr a , volume 436 of Contemp. Math. , pages 101–139. Amer. Math. Soc., Providen ce, RI, 2007. [Mac07] Emanuele Macr ` ı. Stability conditions on curv es. Math. R es. L ett. , 14(4) :657–672, 2007. [Ok a06] So Ok ada. Stability m anifold of P 1 . J. A lgebr aic Ge om. , 15(3):487–505, 2006. [Rin94] Claus Michael Ringel. The braid group action on the set of exceptiona l s equences of a hereditary Artin algebra. In Ab elian gr oup the ory and r elate d topics (Oberwo lfach, 1993) , v olume 171 of Contemp. Math. , pages 339–35 2. Amer. Math. So c., Providenc e, RI, 1994. [ST01] Paul Seidel and Richard Thomas. Braid group actions on derive d categ ories of coheren t shea ves. Duke Math. J. , 108(1):37–108, 2001. [Tho06] R. P . Thomas. Stabilit y conditions and the br aid gr oup. Comm. A nal. Ge om. , 14(1):135– 161, 2006. Ac ademic Suppor t Center, Kogakuin University E-mail addr ess : kt13423@ns .kogakuin.ac.jp
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment