Algebraic Distributed Differential Space-Time Codes with Low Decoding Complexity
The differential encoding/decoding setup introduced by Kiran et al, Oggier-Hassibi and Jing-Jafarkhani for wireless relay networks that use codebooks consisting of unitary matrices is extended to allow codebooks consisting of scaled unitary matrices.…
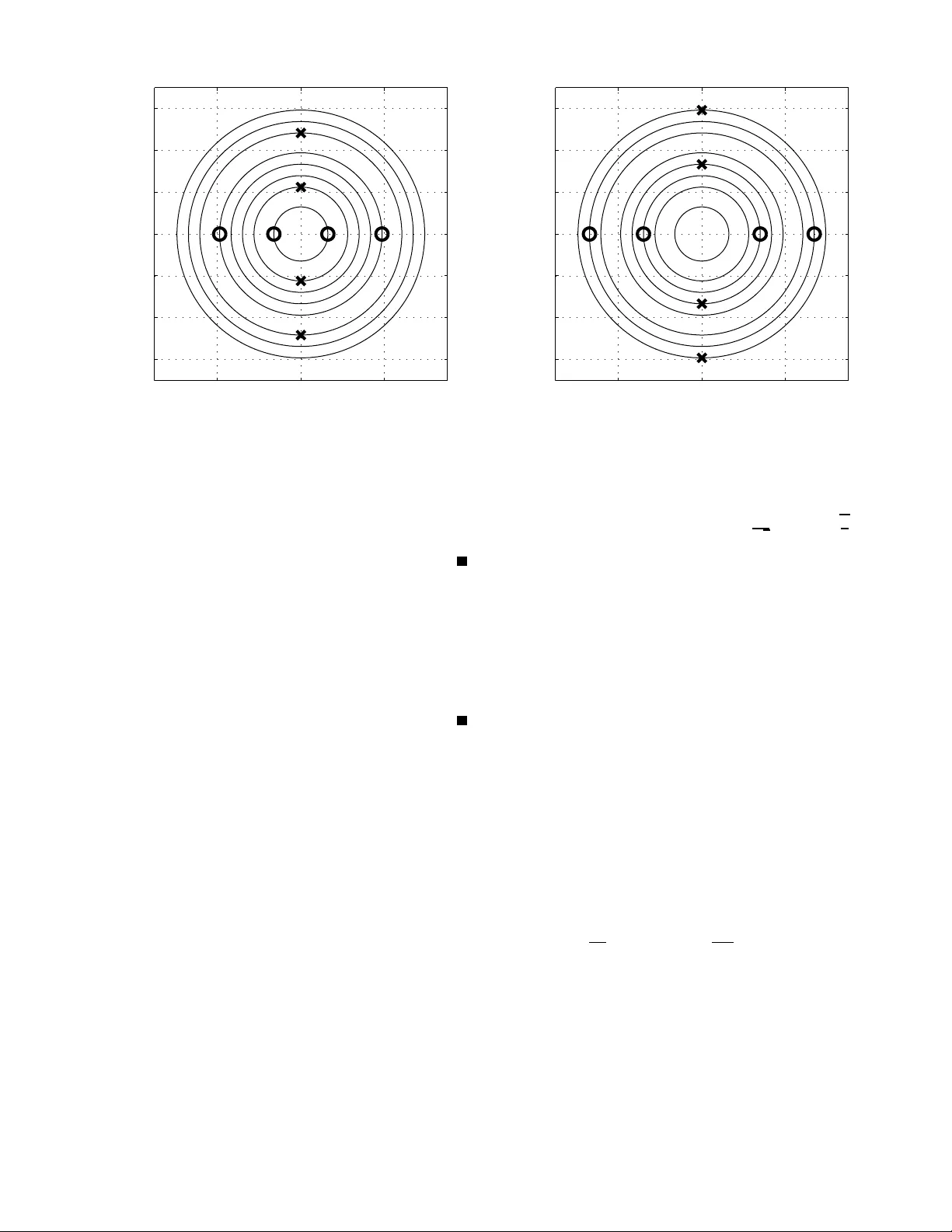
Authors: ** 저자 정보가 논문 본문에 명시되어 있지 않음. (예: “저자 미상”) **
IEEE TRANSACTIONS ON WIRELESS COMMUNICA TIONS , V OL. XX, NO. XX, XXXX 1 Algebraic Distrib ute d Dif ferential S pace-T ime Codes with Lo w Decoding Comple xity G. Susinder Rajan, Student Member , IEEE, and B. Sundar Ra jan, Senior Member , IEEE Abstract —The diff erential encoding/decodin g setup introduced by Kiran et al , Oggier -Hassibi and Jing-Jafarkhani for wir eless relay n etworks that u se codebooks consisting of u nitary matrices is extended to allo w codebooks consisting of scaled unitary matrices. For such codebooks to be usable in t he Jin g-Hassibi protocol for cooperativ e divers ity , the cond itions in volving the relay matrices and the codebook that need to be satisfied are identified. Using the algebraic f ramewo rk of extended Clifford algebras, a new class of Distributed Differential S pace-Time Codes satisfying th ese conditions for power of two n umber of relays and also achieving ful l cooperative diversity wi th a low complexity sub-optimal receiv er is propose d. Simulation results indicate that the proposed codes outperform both the cyclic codes as well as the circulant codes. Furthermore, these codes can also be applied as Differential Space-Time codes for non- coherent communication in classical point to poin t mul tiple antenna systems. Index T erms —Algebra, cooperativ e diversity , low decodin g complexity , spac e-time coding. I . I N T R O D U C T I O N C ONSIDER the scenario of R + 1 u sers wanting to commun icate to a single destination usin g coop erative strategies. F or simplicity , we consider one of the R + 1 u sers as the sou rce and the rem aining R users as r elays. Pre dominan tly there are two types of relaying strategies discussed in the literature, i.e., 1) amplify an d forward and 2 ) decod e and forward. In th is work, we f ocus only on amplify and forward based relay ing strategies wherein the r elays are allo wed to perfor m linear pr ocessing o f the received signal. Amplify and forward based r elaying is simpler an d m oreover does not require the relays to h av e knowledge of the codebook used by th e source or th e knowledge of the source to relay channel fading gains. Recently in [1], the idea of sp ace- time co ding fo r collocated MIMO ( Multiple In put Multiple Output) sy stems has been applied in the setting o f coop erative wireless relay networks in the name of distrib uting space- time co ding, wherein co ding is perform ed acro ss users and time. This strategy provides each user a diversity or der equal to the number of relay s even thoug h all the u sers are o nly equippe d with a sing le antenna. The diversity thus achieved This work was supported through grants to B.S. Rajan; partly by the IISc-DRDO program on Advance d Researc h in Math ematical Enginee ring, and partly by the Council of Scienti fic & Industrial Research (CSIR, In- dia) Research Grant (22(0365)/04/ EMR-II). The materia l in this pape r wa s presente d in parts at the IEEE Interna tional Symposium on Information theory [11], [12] held at Nice, France during June 24-29, 2007. G. Susinder Rajan an d B. Sunda r Rajan are with the Department of Electrical Commu- nicat ion Engineering, Indian Insti tute of Science , Bangalore -560012, India. Email: { susind er ,bsrajan } @e ce.iisc.ernet.in. Manuscript recei ve d May 07, 2007; revi sed September 10, 2007. is called as cooper ativ e diversity . Howe ver , such strategies require tha t th e d estination have complete kn owledge of the fading coefficients from all the users to itself a s well as that of the fading coefficients between users. Obtain ing the knowledge of the fading co efficients between the users at the de stination req uires addition al resourc es. T o solve this problem , in [2], Kiran et a l hav e prop osed a d ifferential encodin g/decod ing setup fo r cooper ativ e wireless networks that does no t require the k nowledge of fading co efficients between the users at the d estination. Such codes were nam ed as par tially coh erent distributed space-time c odes in [2]. In a recent work [4], it has been shown that the sam e strategy of [2] o ffers full diversity with a sub optimal receiver that d oes not require the k nowledge of any o f th e fading coefficients. In an in depend ent work [3], Jing a nd Jafarkhani have p ropo sed a differential encoding/de coding setup f or coop erative wireless relay networks which is m ore ge neral than the setu p pro posed in [2], [4 ] an d th ey have also provid ed few code con structions. W e call the class of Differential Space-Time Co des ( DSTCs) which can be used in a d istributed mann er f or coope rativ e div ersity as Distributed DSTCs ( and deno te by DD STCs) to differentiate them fr om DSTCs for co llocated MIM O systems. The prob lem of designing DDSTCs is more challenging than that of DSTCs for c ollocated MIMO systems, since in this scenario we ha ve additional constraints to b e satisfied which are d ue to the cooperative diversity protoc ol. In [5], th e setup of [2], [4] has been generalized to the case when the source and destination nodes have mu ltiple antennas. In [5], the autho rs propo se the use of a ran dom diago nal unitary matrix cod ebook in general and for certain specific nu mber of relays ( 3 , 6 and 9 ) propo se the use of cyclic c odes. Howe ver , a ran dom c ode is not guaran teed to offer full di versity . Moreover designing goo d cyclic cod es becomes difficult for large number of relays. In [3], the auth ors propose the use o f Alamouti code and S p (2) code f or the spec ific case of 2 a nd 4 relays. For an arbitrary number of relays, the auth ors co nstruct fully diverse DDSTCs based o n cir culant matr ices. But, except fo r the Alamouti code all other DDSTC constru ctions in the literatu re [2], [3 ], [4], [5] h ave large decoding co mplexity . T hus, a general f ull div ersity co de construction targeting the req uiremen ts of low encodin g complexity as well as lo w decoding complexity is not av ailable. This issue gains significan t importan ce esp ecially if the nu mber of co operatin g terminals is large, which is q uite expected in applications like wireless sensor n etworks. In this paper we ad dress this issue and p resent the f ollowing contributions: • T he notio n of enco ding complexity for Spa ce-Ti me codes 2 IEEE TRANSACTIONS ON WIRELESS COMMUNICA TIONS , VOL. XX, NO. XX, XXXX in term s of g -gro up encodability is intro duced (Definitio n 1) and its significance is highlighted. • T he differential en coding /decodin g setup introdu ced by Kiran et a l [ 2], Oggier et al [5] and Jing et al [3] for wireless relay networks that u se codebo oks consisting of unitary matrices is generalized to allow code books consisting of scaled unitary matric es. This g eneralization aids in redu cing the encod ing/deco ding complexity of DDSTCs. When the codeb ook of scaled unitary matrices is used in the Jin g-Hassibi pro tocol [1] f or differential encodin g at the source, the extra conditions in volving the interre lationship between relay matrices an d the code- word matrices that need to be satisfi ed are identified (Eqn. (4)). • Using the algeb raic framework of extend ed Clifford al- gebras, a n ew class of DDST Cs satisfying these extra condition s (Con structions 4. 3 an d 4.4) is prop osed which achieves full diversity with a low co mplexity sub-op timal receiver (Th eorem 3). Explicit constructio n o f multidi- mensional signal sets that lead to fu ll diversity ( Theorem 2) are also pr ovided. T o the best of our knowledge, this is the first known low decoding complexity DDSTC scheme for cooperative wire less networks which is available for all power of two number of relays. A. O r ganization of the pa per Section II introdu ces the system model for the distributed differential en coding /decodin g setup employing a differential scaled unitary matrix codebo ok at the source. In Section III, the n otion of g -gr oup encodable and g -grou p deco dable space- time codes is discu ssed fo r the system model of Section II and the pro blem statement for DDSTCs with low enco ding and dec oding complexity is given. The extra con ditions on the code structur e imposed by the co operative diversity p rotocol of [2], [3], [4], [ 5] are th en described. In Section IV, we explicitly construct a family of DSTCs using extended Clif ford algebras and prove using alg ebraic techniq ues that they satisfy the extra cond itions ne eded for DDSTCs. Simulatio n results and discussion on fu rther work comprise Sections V and VI respectively . B. No tation For two sets A 1 and A 2 , A 1 × A 2 denotes the Cartesian produ ct of A 1 and A 2 . For a matrix C , the matrices C ∗ , C T and C H denote the conjug ate, transpose and con jugate transpose of C respectively . F or a complex nu mber x , x I and x Q denote its in-phase and quad rature-p hase compon ents respectively . For a vecto r a , a [ i ] denotes the i th entry of a . An all zero matrix o f appropriate size will b e denoted by 0 . A co mplex Gaussian vector with ze ro mean an d covariance matrix Ω will b e deno ted b y C N (0 , Ω) . I I . S Y S T E M M O D E L E M P L O Y I N G D I FF E R E N T I A L S C A L E D U N I TA RY M AT R I X C O D E B O O K In this section , we briefly explain the d istributed differential encodin g/decod ing setup propo sed in [2], [3], [5] with a slight modification . W e c onsider a network co nsisting of a source node, a destination n ode and R othe r rela y n odes which aid the so urce in communic ating information to the destinatio n. All the nodes are assumed to be eq uipped only w ith a sing le an tenna and are half d uplex constrained, i.e., a node can not transmit an d receive simultaneo usly at the same frequ ency . Th e wireless channels between the terminals are assumed to quasi-static and flat fading. The channel fading gains f rom the sour ce to the i - th relay , f i and fr om the j -th relay to the destinatio n g j are all assumed to be indep endent and identically distributed complex Gaussian ra ndom variables with zero mean and unit v ariance. Moreover , we assume symbol synchronization among all the nodes. Every tr ansmission cycle fro m th e sou rce to the de stination comprises of two stages. I n th e first stage, the source transmits a T ( T ≥ R ) length vector √ π 1 T P s which the relays receive. Here, P d enotes the to tal average power spent by all th e relay s and the sour ce. The fraction o f to tal p ower P spen t by th e source is den oted b y π 1 . The vector s satisfies E[ s H s ] = 1 and is a fun ction of the info rmation that the source in tends to commun icate. The exact relation of s with the information sent b y the source will be made prec ise in th e seq uel. The received vector at the j - th relay n ode is then given b y r j = √ π 1 T P f j s + v j , w ith v j ∼ C N (0 , I T ) . In the second half of th e cycle, all the relay nod es are scheduled to transmit together . The j -th relay n ode tran smits a T len gth vector t j which is a functio n of r j . The re lays are on ly allo wed to linearly proce ss th e rec eiv ed vector r j or its conjuga te r j ∗ . T o be pr ecise, th e j - th relay nod e is equ ipped with a T × T unitary m atrix A j (called relay matrix) and it transmits either t j = q π 2 P π 1 P +1 A j r j or t j = q π 2 P π 1 P +1 A j r j ∗ . W ithout loss o f generality , we may assume that M relay s linearly proc ess r j and the rem aining R − M relays linearly p rocess r j ∗ . Here, π 2 denotes the frac tion of total power P spent by a r elay . If the quasi-static dur ation of the channel is much grea ter than 2 T time slots, then th e re ceiv ed vecto r at the destinatio n is giv en by y = R X j =1 g j t j + w = s π 1 π 2 T P 2 π 1 P + 1 Xh + n (1) where, X = A 1 s . . . A M s A M + 1 s ∗ . . . A R s ∗ , h = f 1 g 1 . . . f M g M f ∗ M +1 g M +1 . . . f ∗ R g R T , n = q π 2 P π 1 P +1 P M j =1 g j A j v j + P R j = M +1 g j A j v j ∗ + w and w ∼ C N (0 , I T ) rep resents the add iti ve noise at the destination. The power allocation factors π 1 and π 2 are chosen in such a way to satisfy π 1 P + π 2 P R = 2 P . Thro ugho ut this paper, we ch ose π 1 = 1 and π 2 = 1 R as suggested in [1]. The d ifferential encodin g is perform ed at th e sour ce as follows. An initial vector s 0 known to th e destination which satisfies s 0 H s 0 = 1 is transmitted by the sourc e in the first cycle. Th e in itial vector s 0 should be suc h th at the initial matrix X 0 = A 1 s 0 . . . A M s 0 A M + 1 s 0 ∗ . . . A R s 0 ∗ (2) RAJ AN a nd RAJ AN: ALGEBRAIC DISTRIBUTED DIFFERE NTIAL SP ACE-TIME COD ES WITH LOW DEC ODING COMPLEXITY 3 is unitar y . The transmitted vector at th e t -th cycle is then g iv en as follows s t = 1 a t − 1 U t s t − 1 (3) where, U t ∈ C is the codeword containing the infor mation at the t -th cycle which satisfies U t H U t = a 2 t I T , a t ∈ R . The cod ebook C at the so urce con sisting of scaled unitary matrices sho uld satisfy E[ a 2 t ] = 1 in o rder to m eet the power con straint a t the sour ce and relay s. Th e originally propo sed codin g strategies in [ 2], [3], [5] for ce a t = 1 for all codewords. The received vector at th e destination in the t -th cycle can then be written as y t = q π 1 π 2 T P 2 π 1 P +1 X t h t + n t where, X t = A 1 s t . . . A M s t A M + 1 s t ∗ . . . A R s t ∗ . If A i U t = U t A i , ∀ U t ∈ C , i = 1 , . . . , M and A i U t ∗ = U t A i , ∀ U t ∈ C , i = M + 1 , . . . , R (4) then, substituting fo r s t from (3) we get X t = 1 a t − 1 U t X t − 1 . If th e chann el remains ap proxim ately con stant fo r 4 T channel uses, then we can assume that h t = h t − 1 . Then , y t = q π 1 π 2 T P 2 π 1 P +1 X t h t + n t = q π 1 π 2 T P 2 π 1 P +1 1 a t − 1 U t X t − 1 h t − 1 + n t = 1 a t − 1 U t y t − 1 + ˆ n t (5) where, ˆ n t = − 1 a t − 1 U t n t − 1 + n t . Now we propose to d ecode the cod ew ord U t as follows ˆ U t = arg min U t ∈ C k y t − 1 a t − 1 U t y t − 1 k 2 (6) where, a t − 1 can be estimated f rom the pr evious decision . Note that the above decoder does not r equire the k nowledge o f the channel gains an d the re lay matrices A i , i = 1 , . . . , R . Also, note tha t this d ecoder is not a Max imum-Likeliho od (ML) decoder since the equiv alent noise vector ˆ n t is dep endent on the previous codeword U t − 1 throug h a t − 1 . Howe ver , for the collocated M IMO case, it h as been shown in [6], [7] that th ere is n o sign ificant perfor mance loss due to this. In th is setup, we call C a DDSTC to disting uish it fro m DSTCs for collocated MIMO systems. I I I . P RO B L E M S TA T E M E N T In this section, we d escribe the pro blem statement of designing DDSTCs with low encodin g comp lexity an d low decodin g co mplexity . In or der to benefit fr om low encod ing complexity and lo w decodin g co mplexity , we propose to ch oose the DDSTC C to be a g − grou p en codable ( g > 1 ) linear STBC. Definition 1: A linear design S ( s 1 , s 2 , . . . , s K ) of size n × n in K real indeter minates or variables s 1 , s 2 , . . . , s K is a n × n matrix with entries being a complex line ar co mbinatio n o f the variables s 1 , s 2 , . . . , s K . T o be precise, it can be wr itten a s follows: S ( s 1 , s 2 , . . . , s K ) = K X i =1 s i B i where, B i ∈ C n × n are square com plex matrice s called the weigh t matrices. A linear STBC C is a finite set of n × n complex m atrices which can be ob tained b y taking a lin ear design S ( s 1 , s 2 , . . . , s K ) and specifying a signal set A ⊂ R K from which the inf ormation vector x = s 1 s 2 . . . s K T take v alues, with the additional co n- dition th at S ( a ) 6 = S ( a ′ ) , ∀ a 6 = a ′ ∈ A . A linear STBC C = { S ( x ) | x ∈ A } is said to b e g -g roup encod able (or K g real symb ol encodab le or K 2 g complex sym bol encod able) if g d i vides K and if A = A 1 × A 2 × · · · × A g where each A i , i = 1 , . . . , g ⊂ R K g . Thus, giv en a g -g roup enco dable STBC, it d efines a nat- ural partitioning o f the real variables of its associated lin - ear design into g -grou ps. This pa rtitioning defines a par- titioning of the set of weight matrices o f S ( x ) in to g - group s, the k -th grou p containing K /g m atrices. F or sim- plicity we assume th e simplest partition ing of the info r- mation symbol vector as x = x 1 T x 2 T . . . x g T T where, x k = h s ( k − 1) K g +1 s ( k − 1) K g +1 . . . s kK g i T . No w S ( x ) can be written as, S ( x ) = g X k =1 S k ( x k ) where , S k ( x k ) = kK g X i = ( k − 1) K g +1 s i B i . Minimizing the decod ing metric correspo nding to (6), k y t − 1 a t − 1 S ( x ) y t − 1 k 2 (7) is in gen eral not the same as minimizing k y t − 1 a t − 1 S k ( x k ) y t − 1 k 2 (8) for e ach 1 ≤ k ≤ g ind ividually . Howe ver if it so happen s, then the decod ing complexity is reduced by a large extent. Definition 2: A linear STBC C = { S ( x ) | x ∈ A } is said to b e g -gro up decod able (or K g real symbol dec odable or K 2 g complex symbo l decod able) if it is g -gr oup enco dable and if its decodin g metric in (7) can b e simplified as in (8). Theorem 1: [12] The decoding metric in (7) can be sim- plified as in (8) if B i H B j + B j H B i = 0 (9) for all weigh t matrices B i and B j belongin g to two dif feren t group s. W e illu strate th e significance of the above definitio ns con- cerning encod ing a nd de coding comp lexity by giving few examples. Example 3.1: Consider th e Golden code for 2 transmit an- tennas. It has 8 real v ariables. F or the coherent MIMO channel, the sign al set used is QAM for e ach c omplex variable. Hence, this code is a 8 -g roup encodab le ( since QAM is a Cartesian produ ct of two P AM signal sets) and 1 - grou p decodab le linear STBC. Howe ver , if we now impose the requirement for un itary codewords, then we will have to solve for signal sets which will yield unitary codew ords inside the di vision algebra. This may amount to entangling all the 8 -real variables which will make the code 1 -grou p encodable and 1 -g roup decodable. This approa ch was recen tly attempted in [9]. 4 IEEE TRANSACTIONS ON WIRE LESS COMMUNICA TIONS , VOL. XX, NO. XX, XXXX Example 3.2 : Let us ta ke the example of the Alamo uti code for 2 transmit an tennas. It h as 4 real variables. If the signal set is ch osen to b e PSK fo r every complex variable, then all the cod ew ords become u nitary matrice s. Hence the resulting code is 2 -group encodable and 2 -group decodable. Ho wev er, note tha t if we take square QA M to be the signal set for each com plex v ariable, then we get a 4 -gro up encodable (since square QAM is a Cartesian produ ct of tw o P AM signal sets) and 4 -group decodable code, b ut now th e codew ords are scaled unitary matrice s as opp osed to unitary m atrices. T hus relax ing the co dewords to be scaled unitary matrices allows us to lower the enco ding and decoding complexity . The above two examp les show that the choice of signal sets is crucial in obtainin g low encodin g and decod ing complexity . Example 3.2 explicitly shows how allowing scaled u nitary codebo oks aids in reducing the encoding /decodin g com plexity . The DDSTC design prob lem is th en to d esign a g - group decodab le linear STBC C = S x = s 1 s 2 . . . s K | x ∈ A of size T × T to b e used at the source such that 1) All co dew ords are scaled un itary m atrices satisfy ing the transmit power constraint. 2) Th e p arameters K and g are maximized. In creasing K is motiv ated b y the need for high rate transm ission and maximizing g is motiv ated by the requ irement for low decodin g co mplexity . 3) Th ere exist R unitary matrices A 1 , A 2 , . . . , A R of size T × T such that the first M of th em satisfy A i C = CA i , i = 1 , . . . , M , ∀ C ∈ C and the remainin g R − M of them satisfy A i C ∗ = CA i , i = M + 1 , . . . , R , ∀ C ∈ C . 4) Th ere exists an initial vector s 0 such that th e in itial matrix X 0 is unitary . 5) min S 1 , S 2 ∈ C | ( S 1 − S 2 ) H ( S 1 − S 2 ) | is m aximized, i.e., the coding g ain is maximized . Observe that the r equirem ents for d esigning DDSTCs are much more restricti ve than that for DSTC s. Note that cond ition (3) and cond ition (4) are no t required for designin g DSTCs. As an additio nal r equireme nt it would be nice to have a single design S ( x 1 , x 2 , . . . , x K ) and a family o f signal sets, one f or each tr ansmission rate such th at all the requ ired condition s are met. Th is mea ns th at we n eed to be able to find R relay matrices satisfying the require d condition s irrespective of the size of the co de | C | . I V . E X P L I C I T C O N S T R U C T I O N O F D D S T C S In this section we giv e an explicit con struction of full div ersity 4 -g roup d ecodab le DDSTCs for all power o f two number o f relays. Op timizing th e coding g ain for the p ropo sed DDSTCs is difficult in genera l and is beyond the sco pe of this paper . Construc ting g − grou p decodable DDSTCs fo r a rbitrary g app ears to b e rather difficult and a b rief discussion on the issues inv olved is given is Sec tion VI. I n Subsectio n I V -A, the construction of th e pro posed linear design s using tools f rom extended Clifford algebra s is g iv en. I n Subsection IV -B, an explicit con struction of signal sets A lead ing to full di versity for arbitrary transmission rate is provided for the linear designs giv en in Subsection IV -A, th us completely describing the construction of th e lin ear STBC C . In Su bsection I V - C, we use alge braic techn iques to explicitly constru ct the R relay matrices satisfying the re quired con ditions for arbitrary size of the co deboo k C . A. Co nstruction of linear design In this subsection, we briefly describe a construction o f a class of rate one, linear designs satisfying the cond itions for fo ur-group deco dability which we re first obtained using extended Clifford algebras in [1 0]. Ex tended Clifford algeb ras and line ar d esigns fr om them are addressed in detail in [10]. Howe ver [10] ch ooses sign al sets as applicable for coheren t commun ication in a distributed space-time coding setup. A brief explan ation of exten ded Clif ford algebras an d linear designs using them is provided in Appendix A. This alge- braic framework gi ven in Appendix A is needed to explicitly construct the relay matrices and the initial vector in Subsectio n IV - C. Construction 4.1 : Gi ven a n × n linear design A ( x 1 , x 2 , . . . , x L ) in L complex variables x 1 , x 2 , . . . , x L , one can con struct a 2 n × 2 n linear de sign D as follows: D = A ( x 1 , x 2 , . . . , x L ) B ( x L +1 , x L +2 , . . . , x 2 L ) B ( x L +1 , x L +2 , . . . , x 2 L ) A ( x 1 , x 2 , . . . , x L ) where, the linear de sign B ( x L +1 , x L +2 , . . . , x 2 L ) is identical to the linear design A ( x 1 , x 2 , . . . , x L ) except that i t is a design in a different set of complex v ariables x L +1 , x L +2 , . . . , x 2 L . W e call this constru ction as the ’ ABB A con struction’ which was first introduc ed in [8]. Construction 4.2 : Gi ven a n × n linear design A ( x 1 , x 2 , . . . , x L ) , on e can co nstruct a 2 n × 2 n linear design S as f ollows. S = A ( x 1 , x 2 , . . . , x L ) − B H ( x L +1 , x L +2 , . . . , x 2 L ) B ( x L +1 , x L +2 , . . . , x 2 L ) A H ( x 1 , x 2 , . . . , x L ) where, the linear de sign B ( x L +1 , x L +2 , . . . , x 2 L ) is identical to the linear design A ( x 1 , x 2 , . . . , x L ) . W e call this con struc- tion as the ’doubling c onstruction ’. W e ar e now ready to describe the constru ction of the pr oposed linear designs. Construction 4.3 : T o obtain a linear de sign for R = 2 λ relays, follow the steps giv en below . Step 1: Starting with the lin ear design [ x 1 ] in comp lex v ariable x 1 , keep ap plying ABBA con struction iteratively on it till a 2 λ − 1 × 2 λ − 1 linear design D is obtained. Step 2 : App ly dou bling constru ction on D and scale it b y 1 √ R to obtain the lin ear design. Example 4.1: F ollowing the steps g iv en above for R = 8 relays, we get RAJ AN a nd RAJ AN: ALGEBRAIC DISTRIBUTED DIFFERE NTIAL SP ACE-TIME COD ES WITH LOW DEC ODING COMPLEXITY 5 1 √ 8 x 1 x 2 x 3 x 4 − x ∗ 5 − x ∗ 6 − x ∗ 7 − x ∗ 8 x 2 x 1 x 4 x 3 − x ∗ 6 − x ∗ 5 − x ∗ 8 − x ∗ 7 x 3 x 4 x 1 x 2 − x ∗ 7 − x ∗ 8 − x ∗ 5 − x ∗ 6 x 4 x 3 x 2 x 1 − x ∗ 8 − x ∗ 7 − x ∗ 6 − x ∗ 5 x 5 x 6 x 7 x 8 x ∗ 1 x ∗ 2 x ∗ 3 x ∗ 4 x 6 x 5 x 8 x 7 x ∗ 2 x ∗ 1 x ∗ 4 x ∗ 3 x 7 x 8 x 5 x 6 x ∗ 3 x ∗ 4 x ∗ 1 x ∗ 2 x 8 x 7 x 6 x 5 x ∗ 4 x ∗ 3 x ∗ 2 x ∗ 1 . (10) B. Co nstruction of signal sets leading to full diversity In this subsectio n, we construct signal sets for the linear designs con structed in the previous subsection that lead to full div ersity STBCs. In gen eral, the signal sets should be design ed such that the resulting linear ST BC C m eets the f ollowing requirem ents. 1) Scaled u nitary codeword matrices m eeting power con- straint. 2) Four-group encodable and Four-group d ecodable. 3) Difference o f any two different codeword m atrices should be f ull rank. W e call such a c ode to be ’fully div erse’. 4) Th e minimum determinant of the difference of any two codewords matr ix should be max imized (Coding gain). W e shall fir st illustrate the signal set construction pro cedure for 4 relays an d derive important insights form it. Then , we generalize the ideas th us obtained for constructing sig nal sets for any R = 2 λ relays. The design for 4 relays accordin g to the con struction in the previous subsection is giv en by S = 1 √ 4 x 1 x 2 − x ∗ 3 − x ∗ 4 x 2 x 1 − x ∗ 4 − x ∗ 3 x 3 x 4 x ∗ 1 x ∗ 2 x 4 x 3 x ∗ 2 x ∗ 1 . (11) Let us look at S H S sho wn in (12) at the to p of the next pag e to find ou t the con ditions on the signal sets under wh ich the codewords are scaled unitary matrices. From (1 2), we see th at the signal set sh ould b e ch osen such that the follo wing condition is satisfied for all the s ignal points. x ∗ 1 x 2 + x ∗ 2 x 1 + x ∗ 3 x 4 + x ∗ 4 x 3 = 0 . (13) Firstly , we identify the grouping of the real variables into group s such that the correspon ding weig ht matrices in ea ch group satisfy (9). Acc ording to the c onstruction , the fou r group s or real v ariables are as follows: First grou p: { x 1 I , x 2 I } , Second group: { x 1 Q , x 2 Q } , Thir d gro up: { x 3 I , x 4 I } , Fourth group : { x 3 Q , x 4 Q } . It is impo rtant to choose signal sets such that they do no t enforc e join t con straints on variables from different g roups. The requirem ent f or scaled unitary codewords as in (1 3) can be satisfied with out disturb ing 4 - group encod ability if all the sign al points satisfy the following equation: x 1 I x 2 I = − x 1 Q x 2 Q = c 1 , x 3 I x 4 I = − x 3 Q x 4 Q = c 2 (14) where, c 1 and c 2 are p ositiv e r eal constants. Then, the average power constraint requirement can be met by satisfy ing the condition s, E( x 2 1 I + x 2 2 I ) = 1 , E( x 2 1 Q + x 2 2 Q ) = 1 , E( x 2 3 I + x 2 4 I ) = 1 , E( x 2 3 Q + x 2 4 Q ) = 1 . (15) A common set of solu tions f or (14) and ( 15) can be obtained by taking points on the intersection of cir cles and hyperbolas. T o meet the third r equirem ent o f full diversity we make use of the struc ture of the constru cted designs. Note that | ∆ S H ∆ S | = 1 4 ˛ ˛ ˛ ˛ » ∆ A H ∆ A + ∆ B H ∆ B (∆ A ∆ B − ∆ B ∆ A ) H ∆ A ∆ B − ∆ B ∆ A ∆ A ∆ A H + ∆ B ∆ B H – ˛ ˛ ˛ ˛ = 1 4 ˛ ˛ ˛ ˛ » ∆ A H ∆ A + ∆ B H ∆ B 0 0 ∆ A ∆ A H + ∆ B ∆ B H – ˛ ˛ ˛ ˛ ≥ 1 4 max( | ∆ A | ∗ | ∆ A | , | ∆ B | ∗ | ∆ B | ) 2 (16) where, the notation ∆ has been used to denote the difference matrix which will have th e same form as the associated line ar design. Th e seco nd equality in (16) follows becau se the linear designs A an d B commute. This can b e proved as follows. Let A = W X X W and B = W ′ X ′ X ′ W ′ . Then , we hav e » W X X W – » W ′ X ′ X ′ W ′ – = » WW ′ + XX ′ WX ′ + XW ′ XW ′ + WX ′ XX ′ + WW ′ – , » W ′ X ′ X ′ W ′ – » W X X W – = » W ′ W + X ′ X W ′ X + X ′ W X ′ W + W ′ X X ′ X + W ′ W – . Thus we observe th at line ar designs A and B commute if their con stituent sub-matr ices co mmute. Applyin g this argu- ment recursively , the claim follows. Thus S is fully div erse, i. e., | ∆ S | 6 = 0 if either of the submatrices A or B is fully div erse. For the examp le of 4 relays, we h av e | ∆ A | = ∆ x 1 ∆ x 2 ∆ x 2 ∆ x 1 = (∆ x 1 + ∆ x 2 )(∆ x 1 − ∆ x 2 ) . Hence we can guarantee full div ersity by ensuring tha t ∆ x 1 6 = ± ∆ x 2 and ∆ x 3 6 = ± ∆ x 4 . Just like befo re, we should be careful not to disturb 4 -gr oup enco dability in the process. W e take car e of that req uiremen t also by satisfyin g the following conditions: ∆ x 1 I 6 = ± ∆ x 2 I , ∆ x 1 Q 6 = ± ∆ x 2 Q , ∆ x 3 I 6 = ± ∆ x 4 I , ∆ x 3 Q 6 = ± ∆ x 4 Q . (17) Putting toge ther all the condition s that need to be met, we have to choo se co nstellation points satisfying (14), (1 5) and (1 7). The solution can be fou nd simply b y find ing the intersection of poin ts on the un it cir cle x 2 + y 2 = 1 with a hyperb ola xy = c , where c < 1 on the two dimension al xy plane. This is illu strated in Fig. 1. Observe from Fig. 1 that th e hy perbo la inter sects the circle at four different poin ts. B ut the full diversity criterio n demands that ∆ x 6 = ± ∆ y . After en forcing this con dition, o nly two points su rvive out of the four points. They can be either the set of p oints marked A or the set of po ints marked B in Fig. 1. Thu s we have obtained a sign al set containin g 2 points. Supposing that we need more than two p oints, we can draw more circles (c entered at or igin) with radii such that the average power constraint is met and then find tho se 6 IEEE TRANSACTIONS ON WIRE LESS COMMUNICA TIONS , VOL. XX, NO. XX, XXXX S H S = 1 4 2 6 6 4 P 4 i =1 | x i | 2 x ∗ 1 x 2 + x ∗ 2 x 1 + x ∗ 3 x 4 + x ∗ 4 x 3 0 0 x ∗ 1 x 2 + x ∗ 2 x 1 + x ∗ 3 x 4 + x ∗ 4 x 3 P 4 i =1 | x i | 2 0 0 0 0 P 4 i =1 | x i | 2 x ∗ 1 x 2 + x ∗ 2 x 1 + x ∗ 3 x 4 + x ∗ 4 x 3 0 0 x ∗ 1 x 2 + x ∗ 2 x 1 + x ∗ 3 x 4 + x ∗ 4 x 3 P 4 i =1 | x i | 2 3 7 7 5 (12) −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 −1.5 −1 −0.5 0 0.5 1 1.5 x −−−−> y −−−−−> A A B B x +y =1 2 2 xy=c Fig. 1. Signal set s tructur e in 2 dimensions points inter secting with the hyperb ola. M ore p recisely , to get m points, we d raw m 2 concentr ic circles with increasing radii r 1 , r 2 , . . . , r m 2 such tha t P m 2 i =1 r 2 i = m 2 . T hen w e fin d those points inter secting with the hyperbola xy = c where, c is a positive nu mber less than 1 r 2 1 . In this man ner we can get the desired signal set for the variables x 1 I , x 2 I and x 3 I , x 4 I . The signa l set for the variables x 1 Q , x 2 Q and x 3 Q , x 4 Q can be obtained b y con sidering a different hyp erbola. This is illustrated in Fig. 2 sho wn at the top of the next page. Based on empirical studies, we propose to choose po ints in the set A and set B altern ativ ely on each circle. Also, choo sing the constants c 1 = c 2 = 0 seems to give the largest cod ing gain. Similar observations have also been made in [7] for another class o f linear STBCs app licable in co-loc ated M IMO systems. Implem enting these two suggestions makes the signal identical for all the 4 -gr oups and the resultin g signal set fo r the case of 8 p oints is shown in Fig.3. Note that the prop osed signal set constru ction is far from general and the most gen eral solution would correspo nd to the following eq uations: x 1 I x 2 I = − x 1 Q x 2 Q = c 1 , x 3 I x 4 I = − x 3 Q x 4 Q = c 2 , E( x 2 1 I + x 2 2 I ) = d 1 , E( x 2 1 Q + x 2 2 Q ) = d 2 , E( x 2 3 I + x 2 4 I ) = d 3 , E( x 2 3 Q + x 2 4 Q ) = d 4 , ∆ x 1 I 6 = ± ∆ x 2 I , ∆ x 1 Q 6 = ± ∆ x 2 Q , ∆ x 3 I 6 = ± ∆ x 4 I , ∆ x 3 Q 6 = ± ∆ x 4 Q . In g eneral, we need to choo se the p arameters c 1 , c 2 , d 1 , d 2 , d 3 , d 4 , r 1 , r 2 , . . . , r m 2 and the so lution points such that the co ding gain is maximiz ed. 1 This condition is necessary since otherwise the hyperbola will not intersect the circle with least radius. −1.5 −1 −0.5 0 0.5 1 1.5 −1.5 −1 −0.5 0 0.5 1 1.5 x y Fig. 3. Proposed signal set in 2 dimensions Based on the detailed illustration of signal set constru ction for 4 r elays antennas, a n atural generalization o f it to high er dimensions is given in Co nstruction 4.4 as fo llows. Construction 4.4 : Suppose that we want a Q p oints signal set ⊂ R 2 λ +1 for the constructed design f or R = 2 λ relays. Then the resulting signal set ⊂ R 2 λ +1 should be a Cartesian produ ct of 4 signa l sets in R 2 λ − 1 since we insist on 4 -group encodab ility . In o ur case, we choose all th e four sets to be identical and each will contain 4 √ Q points. Let the signal points in R 2 λ − 1 be labeled as p i , i = 1 , . . . , 4 √ Q . If i = 2 q + r , for some in tegers q and r wher e 1 ≤ r ≤ 2 , then p i is given by p i [ j ] = 0 ∀ j 6 = ( q mo d 2 λ − 1 ) + 1 p i [( q mod 2 λ − 1 ) + 1] = + r q +1 , if r = 1 p i [( q mod 2 λ − 1 ) + 1] = − r q +1 , if r = 2 (18) where, r i , i = 1 , . . . , 4 √ Q 2 are positi ve real numbers such that r i +1 > r i , ∀ i = 1 , . . . , 4 √ Q 2 − 1 and P 4 √ Q 2 i =1 r 2 i = 4 √ Q 2 . Example 4.2: Let R = 2 3 = 8 and Q = 16 4 . Th us the rate of transmission o f this code will b e log 2 Q 8 = 2 bits p er channel use. The design is given in (10). The correspo nding four dimension al signal set is described below . RAJ AN a nd RAJ AN: ALGEBRAIC DISTRIBUTED DIFFERE NTIAL SP ACE-TIME COD ES WITH LOW DEC ODING COMPLEXITY 7 −2 −1 0 1 2 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 x 1I x 2I −2 −1 0 1 2 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 x 1Q x 2Q A A A A A A A A B B B B B B B B B B B B B B B B A A A A A A A A x 1I x 2I =c 1 x 1Q x 2Q =−c 1 Fig. 2. General signal set for four relays p 1 = r 1 0 0 0 T , p 2 = − r 1 0 0 0 T , p 3 = 0 r 2 0 0 T , p 4 = 0 − r 2 0 0 T , p 5 = 0 0 r 3 0 T , p 6 = 0 0 − r 3 0 T , p 7 = 0 0 0 r 4 T , p 8 = 0 0 0 − r 4 T , p 9 = r 5 0 0 0 T , p 10 = − r 5 0 0 0 T , p 11 = 0 r 6 0 0 T , p 12 = 0 − r 6 0 0 T , p 13 = 0 0 r 7 0 T , p 14 = 0 0 − r 7 0 T , p 15 = 0 0 0 r 8 T , p 16 = 0 0 0 − r 8 T (19) where, r 1 = 0 . 323 5 , r 2 = √ 3 r 1 , r 5 = 3 r 1 , r 3 = r 2 + r 5 − r 2 3 , r 4 = r 2 + 2 r 5 − r 2 3 , r 6 = 2 + √ 3 r 1 , r 7 = r 3 + 2 r 1 , r 8 = r 4 + 2 r 1 . Thou gh the dim ension o f the signal set is 4 , due to th e special structur e of the signal set, w e can study the two dimension al projections of the signal p oints which is graphica lly sho wn in Fig. 4 at the top of the next page. The pr oposed multidime nsional signal sets in Construction 4.4 are far from gen erality and obta ining a gen eral solution targeting to maximize the coding gain appears to be difficult. Theorem 2: Construction 4.4 provides fully di verse signals sets for the d esigns given in Con struction 4.3. Pr oof: Th e con structed d esigns f or 2 L complex variables has the structure as shown in Construction 4.2. The p artition- ing of the r eal variables into four grou ps is as follows. 1) First g roup : { x 1 I , x 2 I , . . . , x LI } 2) Seco nd group : { x 1 Q , x 2 Q , . . . , x LQ } 3) Th ird grou p : x ( L +1) I , x ( L +2) I , . . . , x 2 LI 4) Fourth gro up : x ( L +1) Q , x ( L +2) Q , . . . , x 2 LQ The sig nal set is a Cartesian pro duct of four smaller dimensiona l signal sets ⊂ R L . Since S H S = A H A + B H B 0 0 AA H + BB H and because the d esigns A and B are identical, it is sufficient to show that the design A ( x 1 , x 2 , . . . , x L ) gives rise to fully diverse scaled unitary co dew ords for the chosen signal set. Let the giv en signal set be denote d b y Λ ⊂ R L . Then the following proper ties a re satisfied ∀ x, y ∈ Λ , x 6 = y . x [ i ] x [ j ] = 0 , 1 ≤ i 6 = j ≤ L (2 0) 1 ≤ | { i | ( x − y )[ i ] 6 = 0 } | ≤ 2 (21) ( x − y )[ i ] 6 = ± ( x − y )[ j ] , i 6 = j (22 ) The design A ( x 1 , x 2 , . . . , x L ) can be ob tained by repeatedly applying ABB A construction on the linear design [ x 1 ] . The o ff-diagonal entries of the matrix A ( x 1 , x 2 , . . . , x L ) H A ( x 1 , x 2 , . . . , x L ) are sum o f terms like x ∗ i x j + x ∗ j x i , i 6 = j . But we have, x ∗ i x j + x ∗ j x i = 2 ( x iI x j I + x iQ x j Q ) which is equal to zero for the signa l set Λ b y virtue of (2 0). Thu s we are guaran teed o f scaled unitar y codew ords. Due to the ABB A structure o f the linear design A ( x 1 , x 2 , . . . , x L ) , the determ inant c an be obtained in an iterativ e m anner . Let A ( x 1 , x 2 , . . . , x K ) = A 1 A 2 A 2 A 1 . Then we have | A | = I 0 I I A 1 A 2 A 2 A 1 I 0 − I I = A 1 − A 2 A 2 0 A 1 + A 2 = ( | A 1 + A 2 | ) ( | A 1 − A 2 | ) . The above equ ation suggests that | A ( x 1 , x 2 , . . . , x L ) | can be computed recursiv ely . For L = 2 , | A ( x 1 , x 2 ) | = ( x 1 + x 2 )( x 1 − x 2 ) . Using th is, we can easily show that | A ( x 1 , x 2 , . . . , x L ) | is a produc t of L ter ms. A typical ter m in the produ ct looks like ( x 1 ± x 2 ± · · · ± x L ) . Thus to ensure | ∆ A ( x 1 , x 2 , . . . , x L ) | 6 = 0 , each term in the p roduc t should n ot equ al zero. Thu s we need (∆ x 1 ± ∆ x 2 ± · · · ± ∆ x L ) 6 = 0 . Let us look at th e real par t 8 IEEE TRANSACTIONS ON WIRE LESS COMMUNICA TIONS , VOL. XX, NO. XX, XXXX −1 0 1 −1.5 −1 −0.5 0 0.5 1 1.5 x 1 x 2 −1 0 1 −1.5 −1 −0.5 0 0.5 1 1.5 x 3 x 4 Fig. 4. T wo dimensional projections of four dimensional signal set for Eight relays of this expression. W e g et (∆ x 1 I ± ∆ x 2 I ± · · · ± ∆ x LI ) . For the given signal set Λ , fr om (21) and (22), we have (∆ x 1 I ± ∆ x 2 I ± · · · ± ∆ x LI ) 6 = 0 . Thus the theorem is proved. C. Construction of Relay Matrices and In itial vector Theorem 3: For the linear design s given by Co nstruc- tion 4.3, ther e exist R relay matric es satisfy ing conditio n (3) fo r arbitrary signal sets. Mo reover , if the initial vector s 0 = 1 0 . . . 0 , th en the initial matr ix X 0 giv en in (2) becom es unitary . Pr oof: See Append ix B. Example 4.3 : Let R = 4 . Then the DDSTC C is obtain ed using the d esign shown in (11) and the signal set giv en in Construction 4.4. The sign al set is a Cartesian pro duct of four 2 -dimen sional signal sets. The relay matrices are given as follows: A 1 = I 4 , A 2 = 0 1 0 0 1 0 0 0 0 0 0 1 0 0 1 0 , A 3 = 0 0 − 1 0 0 0 0 − 1 1 0 0 0 0 1 0 0 , A 4 = 0 0 0 − 1 0 0 − 1 0 0 1 0 0 1 0 0 0 . The initial vector s 0 = 1 0 . . . 0 T and the initial matrix X 0 = I 4 . This DDSTC is sing le complex sy mbol decodab le (or 2 real symbo l decodable). V . S I M U L AT I O N R E S U LT S In this section , we com pare the error perfo rmance of the propo sed DDSTC in Example 4 .3 with that of the circulant codes in [3] and the cyclic codes in [5] for transmission rates of 1 b it per chan nel use (bpcu ) an d 1 . 5 bp cu. The signal set ch osen for th e pro posed code is as giv en by Construction 4.4 with parameter s r 1 = 1 √ 3 , r 2 = q 5 3 for a transmission r ate of 1 bpcu and for the case o f rate=1.5 bpcu, the signal set parameters are r 1 = 0 . 378 , r 2 = 0 . 845 2 , r 3 = 1 . 1339 and r 4 = 1 . 3628 . The circulan t code o f [3] is giv en b y { u 1 A 1 , u 2 A 2 , u 3 A 3 , u 4 A 4 | u i ∈ F i , i = 1 , . . . , 4 } . The relay m atrices A i are taken to be powers of th e 4 × 4 circulant matrix. The sig nal set F i is chosen to b e θ i radians rotated version of 64 - PSK for a transmission rate of 1 b pcu and 1 0 24 -PSK for a rate o f 1 . 5 bpcu. Th e rotation angles are chosen as follows to guarantee full div ersity: θ 1 = 0 , θ 2 = 1 . 5 , θ 3 = 3 , θ 4 = 4 . 5 . Ano ther refe rence fo r c omparison is the cyclic cod es proposed in [ 5] whose co dew ords for rate= 1 bpcu and rate = 1 . 5 bpcu are given as follows: ζ 256 0 0 0 0 ζ 11 256 0 0 0 0 ζ 67 256 0 0 0 0 ζ 101 256 i , i = 0 , . . . , 255 and ζ 4096 0 0 0 0 ζ 43 4096 0 0 0 0 ζ 877 4096 0 0 0 0 ζ 2039 4096 i , i = 0 , . . . , 40 95 where, ζ 256 = e 2 πi 256 and ζ 4096 = e 2 πi 4096 . For simu lations, we have assumed a block fading chan nel w hich is quasi-static for 800 channel u ses and varies independen tly fr om one b lock to another . Fig. 5 shows the error performa nce curves of the propo sed codes in co mparison with those of [3], [5]. I t can b e o bserved from Fig. 5 th at for a tr ansmission rate of 1 b pcu, the propo sed co de outper forms the cyclic cod e by abo ut 5 dB and the circu lant code by more than 10 dB. Similarly for a transmission rate of 1 . 5 b pcu, it can be o bserved tha t th e propo sed co de ou tperfor ms the cyclic c ode by ab out 5 dB and the circu lant cod e by more th an 25 dB. It is worthwh ile to RAJ AN a nd RAJ AN: ALGEBRAIC DISTRIBUTED DIFFERE NTIAL SP ACE-TIME COD ES WITH LOW DEC ODING COMPLEXITY 9 0 10 20 30 40 50 60 70 80 90 10 −6 10 −5 10 −4 10 −3 10 −2 10 −1 10 0 Total Power (dB) Codeword Error Rate Proposed code, rate=1 bpcu Cyclic code, rate=1 bpcu Circulant code, rate=1 bpcu Proposed code, rate=1.5 bpcu Cyclic code, rate=1.5 bpcu Circulant code, rate=1.5 bpcu Fig. 5. E rror performance comparison of the proposed codes with those of [3] and [5] note that f or rate= 1 b pcu, the d ecoding search spac e for th e propo sed c ode is on ly 4 wh ereas it is 25 6 for the o ther two codes. Similarly for r ate= 1 . 5 b pcu, the decod ing search space for the pro posed code is on ly 8 whereas it is 4 096 for th e other two codes. Because of the expone ntial growth of d ecoding search spac e with in creasing transmission rate for th e codes in [ 3], [5], it takes a p rohibitively large time to comp lete a error perfor mance simulation for higher rates. V I . D I S C U S S I O N W e have thus construc ted a c lass of four grou p decodable DDSTCs fo r any power of two n umber of rela ys using algebraic techniques. It is important to note that relaxing the unitary m atrix cod ebook to scaled u nitary m atrix cod ebook has aid ed us in obtaining d ecoding c omplexity benefits. A limitation o f this algebraic metho d is that it is a vailable on ly for power of two number of re lays. Extending th is method to obtain g -g roup decod able DDSTCs f or g > 4 a ppears to b e difficult for two reasons: 1) Th e rate of the k nown linear designs in the literatur e for g > 4 fall below 1 an d ob taining R unitary re lay matrices satisfying Condition (3) is difficult an d it is n ot clear to the autho rs whether such matrices exist at all. For e xample, constructing the relay matrices satisfying Condition (3) for o rthogo nal d esigns is difficult. 2) Even if the relay m atrices are obtained, an initial vecto r satisfying Cond ition (4) may not exist fo r the chosen relay matrices. For t he specific case o f g = 4 , things were possible becau se the linear d esigns co rrespon d to left regular matrix representatio n of an algebra over C an d hence using algebr aic tec hniques, it w as possible to co nstruct the r elay matrices and the initial vector satisfying all the req uired conditions. Optimizing the sign al sets for co ding gain migh t be po ssible for small nu mber of relays and fo r small numb er o f points. Howe ver it becomes dif ficult for larger number of relays and/o r larger number o f points because it in volves m any param eters and a gener al closed form solutio n is difficult. Hence optimiz- ing the sign al sets f or co ding gain is an imp ortant direction for furth er work. A P P E N D I X A C O N S T RU C T I O N U S I N G E X T E N D E D C L I FF O R D A L G E B R A Definition 3: Let L = 2 a , a ∈ N . An Extended Clif ford algebra d enoted by A L n is th e associative algeb ra over R gen- erated by n + a o bjects γ k , k = 1 , . . . , n and δ i , i = 1 , . . . , a which satisfy the fo llowing re lations: • γ 2 k = − 1 , ∀ k = 1 , . . . , n ; γ k γ j = − γ j γ k , ∀ k 6 = j • δ 2 k = 1 , ∀ k = 1 , . . . , a ; δ k δ j = δ j δ k , ∀ 1 ≤ k , j ≤ a • δ k γ j = γ j δ k , ∀ 1 ≤ k ≤ a, 1 ≤ j ≤ n . The classical Clifford alg ebra, d enoted by C l if f n , is ob tained when only the first tw o relation s are satisfied and there are no δ i . Th us C l i f f n is a sub-algeb ra of A L n . Let B n be th e natural R basis for this sub-algebra. B L n = B n ∪ { B n δ i | i = 1 , . . . , a } S a m =2 B n { Q m i =1 δ k i | 1 ≤ k i ≤ k i +1 ≤ a } Then a natura l R basis for A L n is: B n = { 1 } S { γ i | i = 1 , . . . , n } S n m =2 { Q m i =1 γ k i | 1 ≤ k i ≤ k i +1 ≤ n } . W e need a unitary matrix representation for the symbols 1 , γ 1 , γ 2 , γ 1 γ 2 , δ k , k = 1 , . . . , a , S a m =2 Q m i =1 δ k i | 1 ≤ k i ≤ k i +1 ≤ a in the algebra A L 2 . Such m atrices are natura lly provided by the le ft r egular representatio n. W e first view A L 2 as a vector space over C by thinking of γ 1 as the complex numb er i = √ − 1 . A natural C basis for A L 2 is given b y: B L n = { 1 , γ 2 } ∪ {{ 1 , γ 2 } δ i | i = 1 , . . . , a } S a m =2 { 1 , γ 2 } { Q m i =1 δ k i | 1 ≤ k i ≤ k i +1 ≤ a } . Thus the dimension of A L 2 seen a s a vector space ov er C is 2 n + a − 1 . W e have a n atural embed ding o f A L 2 into End C ( A L 2 ) , (the set of all C -linear maps from A L 2 to itself) given b y left multiplication as shown below . φ : A L 2 7→ End C ( A L 2 ) φ ( x ) = L x : y 7→ xy . Since L x is C -linea r , we c an get a matrix rep resentation of L x with resp ect to th e natu ral C basis B L n . Left regular representatio n yields unitary ma trix r epresentation s for the required symbols in the algebra. T he resulting linear design s are precisely those given by Constructio n 4.3. This has been explicitly sho wn in mo re detail in [10]. A P P E N D I X B P R O O F O F T H E O R E M 3 Pr oof: Let u s p rove the th eorem assum ing that all the complex variables o f the lin ear desig n take values from th e entire complex field. W e u se the fact that th e linear design for R = 2 λ relays was obtained as a matrix representation of the Extended Clifford algeb ra A 2 λ − 1 2 . Th us a = λ − 1 . W e c hoose 10 IEEE TRANSACTIONS ON WIRELESS COMMUNICA TIONS , VOL. XX, NO. XX, XXXX M = 2 a = R 2 . The M relay ma trices are explicitly gi ven by the union of the elemen ts of the sets { φ (1) , φ ( δ 1 ) , . . . , φ ( δ a ) } and { S a m =2 Q m i =1 φ ( δ k i ) | 1 ≤ k i ≤ k i +1 ≤ a } . By virtue of the proper ty that φ is a ring ho momor phism, these matric es are guar anteed to commute with all the codewords because they are matrix representatio ns of elements belo nging to th e center of the algeb ra A 2 λ − 1 2 . T o obtain th e remaining R − M relay matrices, we need to find unitary matrice s which satisfy A i C ∗ = CA i , i = M + 1 , . . . , R (23) where, C is any codeword. But the co deword C is simply a matrix r epresentation of some e lement belonging to the Extended Clifford a lgebra. One method to g et these relay matrices is to take them from within the Extend ed Clifford algebra itself. By doing so, we can translate the co ndition in (23) into a con dition on elements of the algeb ra wh ich will then p rovide us a handle o n the prob lem. T ow ards that end, we first identify a map in the algeb ra wh ich is the an alogue of taking the co njugate of the matrix repr esentation of an element. Note from Appendix A that we used the fact that γ 1 can be though t of as the c omplex number i = √ − 1 . When we take the con jugate of a m atrix, we simply replace i by − i . Hence the analogue of this action in the algebra is to repla ce γ 1 by − γ 1 . Thus, the analog ous map σ in the algebr a is defined as follows: σ : x 7→ ¯ x (24) where, the elemen t ¯ x is ob tained from x by simply rep lacing γ 1 by − γ 1 in the e xpression of x in terms of the n atural R - basis of Ex tended Clifford alg ebra. Now the prob lem is to find R − M distinct elements den oted by a i , i = M + 1 , . . . , R of the alge bra A 2 λ − 1 2 which satisfy a i ¯ x = xa i , ∀ x ∈ A 2 λ − 1 2 . The elements o f the un ion o f the following two sets satisfy the above r equired cond ition. { γ 2 { 1 , δ 1 , . . . , δ a }} , ( γ 2 ( a [ m =2 m Y i =1 δ k i | 1 ≤ k i ≤ k i +1 ≤ a )) This can be proved by using the anti-commu ting pr op- erty , i.e., γ 2 ( − γ 1 ) = γ 1 ( γ 2 ) . Hen ce the matrix rep- resentation of the se specific elements gives the u nitary relay matrices A i , i = M + 1 , . . . , R . Supp ose we plug in these relay matr ices to for m a linear d esign X = A 1 s . . . A M s A M + 1 s ∗ . . . A R s ∗ where, s = x 1 x 2 . . . x R T , it tur ns o ut that we g et exactly the same linear design wh ich is used a t the source . Thus the initial vecto r choice of s 0 = 1 0 . . . 0 T guaran tees that the initial m atrix X 0 is an iden tity matrix. Howe ver , we would like to po int ou t that there are also other elements of the alge bra which satisfy a i ¯ x = xa i , ∀ x ∈ A 2 λ − 1 2 . For example, consider th e u nion of the elemen ts of the sets { γ 1 γ 2 { 1 , δ 1 , . . . , δ a }} and { γ 1 γ 2 { S a m =2 Q m i =1 φ ( δ k i ) | 1 ≤ k i ≤ k i +1 ≤ a }} . A C K N O W L E D G M E N T The au thors thank Prof. Hamid Jafarkhani, Dr . Y indi Jing and Dr . Fr ´ ed ´ erique Oggier for providing us with prep rints of their recen t works [ 3], [4], [5], [9 ]. The auth ors a re g rateful to the anonym ous re viewers for provid ing constructiv e comments which helped in im proving the presentation of this pap er . R E F E R E N C E S [1] Y . Jing and B. Hassibi, “Distrib uted space-ti me coding in wireless relay netw orks, ” IEE E T rans. W ir eless Commun. , vol. 5, no. 12, pp. 3524-3536, Dec 2006. [2] K iran T . and B. S undar Rajan, “Parti ally-coh erent dist ribute d space- time codes with diffe rential encoder and decod er , ” IEEE J . Select . Areas Commun. , vol. 25, no. 2, pp. 426-433, Feb 2007. [3] Y . Jing and H. Jafark hani,“Distri buted dif fere ntial space-time coding for wireless relay networks, ” to appea r in IEEE T r ans. on Commun. . Priv ate Communicat ion. [4] F . Oggier , B. Hassibi, ”A coding strate gy for wireless networ ks with no channe l informations”, in A llerton , 2006. [5] F . Oggier , B. Hassibi, ”Cyclic distri buted space-time codes for wireless relay network s with no channel information , ” submitted for publicat ion. [6] M. T ao and R. S. Cheng, “Differe ntial space-time block codes, ” Proceed- ings of IEEE Globeco m 2001 , vol. 2, pp. 1098-1102, San Antonio, USA, Nov 25-29, 2001. [7] Chau Y uen, Y ong Liang Guan, Tjeng Thia ng T jhung, “Sing le-symbol decoda ble differe ntial space-time modulatio n based on QO-STBC, ” IEEE T ra ns. W ir eless Commun. , vol. 5, no. 12, pp. 3329-3335, Dec 2006. [8] O . T irkkon en, A. Boariu and A. Hottinen, “Minimal non-orthog onality rate 1 s pace-t ime block code for 3+ tx antenna s, ” in IEEE Int. Symp. on Spr ead-Spect rum T e ch. & Appl. , New Jersey , Sep 6-8, 2000, pp. 429-432. [9] F . Oggier , “Cyclic algebras for noncohere nt dif feren tial space-ti me cod- ing, ” IEEE T rans. Inform. Theory , vol. 53, no. 9, pp. 3053-3065, Sep 2007. [10] G. Susinde r Rajan and B. Sunda r Raj an, “ Algebraic dist ribute d space- time codes with low ML decoding complexit y , ” Proceedings of IEEE Intl. Symp. Inform. Theory , Nice, France, June 24-29, 2007, pp. 1516-1520. [11] ——–, “Noncohe rent lo w-decodi ng-comple xity space-t ime codes for wireless relay netwo rks, ”i n IEE E Intl. Symp. Inform. Theory , Nice, France, June 24-29, 2007, pp. 1521-1525. [12] ——–, “Signal set design for full-di ver sity lo w-decodi ng complexity dif ferenti al scaled-unit ary STBCs, ” in IEE E Intl. Symp. Inform. Theo ry , Nice, France, June 24-29, 2007, pp. 1616-1620. G. S usinder Rajan (S’2006) was born in Chennai, India in 1983. He completed his B.E. degree at the Colle ge of Engineering Guindy , Anna Unive rsity , India in 2005. He is currently a Ph.D. student in the Departmen t of Electrical Communication Engineer- ing, Indian Institute of Science, Bangal ore, India. His primary research interests include space-t ime coding for MIMO channe ls and wireless relay chan- nels wit h an emphasis on algebrai c code const ruction techni ques. B. Sundar Rajan (S’84-M’91-SM’98) was born in T a mil Nadu, India. He recei v ed the B.Sc. degree in mathematic s from Madras U ni versit y , Madras, India, the B.T ech degr ee in electronic s from Madras Institut e of T e chnology , Madras, and the M.T ech and Ph.D. degre es in electrica l engineering from the Indian Institu te of T echnology , Kanpur , India, in 1979, 1982, 1984, and 1989 respecti v ely . He was a faculty member with the Department of E lectri cal Engineeri ng at the Indian Institute of T ech nology in Delhi, India, from 1990 to 1997. Since 1998, he has been a Professor in the Department of E lectri cal Communicati on E ngineeri ng at the Indian Institute of Science, Bangalo re, India. His primary research intere sts are in algebra ic coding, coded modulati on and space-time coding. Dr . Rajan is an Editor of IEEE Transa ctions on Wi reless Communications from 2007 and also a Editorial Board Member of Internat ional Journal of Information and Coding Theory . He is a Fello w of Indian National Academy of Engineeri ng and is a Member of the American Mathematic al Soci ety .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment