Implicit learning of object geometry by reducing contact forces and increasing smoothness
Moving our hands smoothly is essential to execute ordinary tasks, such as carrying a glass of water without spilling. Past studies have revealed a natural tendency to generate smooth trajectories when moving the hand from one point to another in free…
Authors: Daohang Sha, James L. Patton, Ferdin
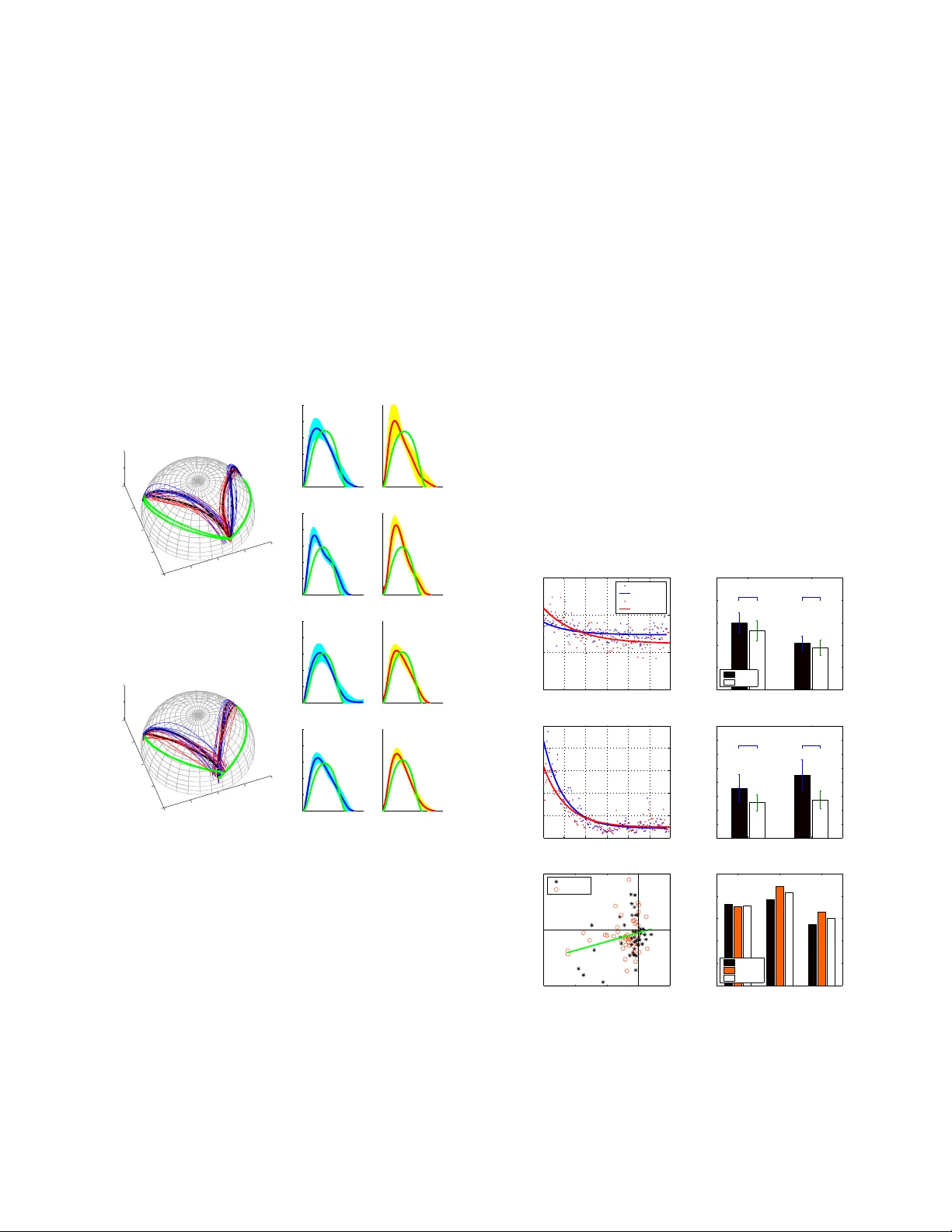
Implicit learning of object geom etry by reducing contact forces and increasing smoothness. Daohang Sha, James L . Patton, Ferdinando A. Mussa-I valdi Sensory Motor Performance Program, Rehabilita tion Institute of Chicago and Northwestern University Medical School E-mail: d-sha, j-patton, sandro@northwestern.edu Abstract Moving our hands smoothly is essential to execute ordinary t asks, such as carrying a gl ass of water without spilling. Past studies [1 -3] ha ve revealed a natu ral tendency to generate smoot h trajectorie s when moving the hand from one point to another in fr ee space. Here w e provide a new perspective on movement smoot hness by showing that smoot hness is al so enforced when t he hand maintain s contact with a curved surface. Maximally smooth moti ons over curved sur faces occur along geodesic lines that depend on fundamental f eatures of the surface, s uch as its radi us and center of curvatur e. Subjects were r equested to execute movements of the hand while i n contact with a vir tual spher e that they could not see. W e found that w ith practice, subjects tended to move thei r hand along s mooth tr ajectories , near geodesic pathways joining star t to end positi ons, to reduce contact f orces with cons trained boundary, variance of contact force, t angential velocity profile error and sum of square j erk along the tim e span of movement. Furtherm ore, after practi cing movements in a r egion of the sphere, subjects executed near-geodes ic movements, less contact fo rces, less contact force va riance, less tangential velocity profile error and les s sum of square jerk in a different region. Th ese findings suggest that the execution of smooth movements while the hand is in contact with a sur face is a means f or extracting informati on about the surface’s geometrical feat ures. 1. Introduction When w e move t he hand f rom on e point to an other – for example w hen w e reach for a glass on the table – w e can chose am ong a v ariety of pos sible pathw ays. However, past stud ies [1 ] have shown that we tend to choose the shortest path for the hand and w e tend to move the hand w ith a simple tem por al profile of velocity : start from rest, reach a m axim um v elocity and g o back to rest. This deceptively simple behav ior has been in terpreted as a tende ncy to pr oduc e maximally smooth hand movements at the expen ses of com plex coordination of m uscles and lim b segm ents [3]. Ev en people w ho are blin d form birth exhibit this tendency [4, 5], which shou ld not therefore be attributed to vis ual processing mechan isms. Mathematically , the sm oothness of a movem ent is captured by low or min imal values of hig h-order temporal derivatives of position. Flash and Hogan [3] app lied the conce pt of smoot hness to the stud y of hand movements b y deriving the trajecto ry that m inim izes the amplitude of the first tem poral derivative of acceleration, or ''jerk”, g iven a fixed start and end position. They found that a m inim um- jerk model is adequate to capture the m ain features of unconstr ained hand movements. H ogan and Flash’s minim um -jer k solution has been only app lied to uncon strained movem ents in a “flat” space gov erned by the rules of Euclidean geom etry. According to these rules, a straight segm ent is the shortest path betw een tw o points. Thus, min imum -jerk mov ements take place along straig ht segments. Euclid ean geo metry, however, does no t app ly w hen one is constrained to remain on a curved su rface. On such s urface, the m inim um- distance path betw een tw o points , also call ed a “geodesic” pat h, is determ ined by the local curvature of the surface [6]. Ov er a sphere, for exam ple, the geodesic path join ing two points is the inters ectio n of the sp here with the pla ne passing through the tw o po ints and the center of the sphere. This is how the shortes t routes of airplan es and sh ips are calcu lated. Using numeri cal metho ds co mbined with Lagrange mu ltipliers (see methods), we have derived the m inimum jerk solution over a spherical su rface [7]. The num erical computation is rather cum berso me: it in volves solving a tw o-point boundary value probl em w ith 18 bou ndary conditions. However, the solution is ultim ately sim ple and intuitive (Figu re 1 C) : the m inimum jerk trajecto ry takes place over th e geodesic path joining start an d end point. The tangential velocity f ollows a bell shape tem poral profile. An im portant observatio n follow s from the theoretical re s ul t o n c on st r ai ne d min imu m j er k: if th e mi ni mum- j er k motion takes place over a geodes ic segm ent, then execut ing minimum jer k or, mor e gener ally, smoot h movem ents ov er a surface inv olves know ing fu ndamental geom etrical features of th e surface, such as its local curvature. This obs ervation leads us to formulate the follo wing hy p othesis: when const rained to move their hand over a curved sur face, subjects develop a model of the surface structure through the pr ogressive recover y of smooth (mi nimum-jerk) m ovements and the reducti on of contact forces. Accor ding to this hypothesi s, smoothness of movem ent is n ot only a criterion f or efficiency , but also (and perhaps, m ostly) a m eans for learnin g the geom etry of the con straints w e come in con tact with . 2. Methods Apparatus . A PHAN ToM 3.0 robot (Sens Able Technologies, Boston , Figure 1A ) provided an object- oriented program m ing env ironmen t for force-f eedback haptic interface [8]. The robot rendered a virtual, sem i- spherical su rface of radius 20 cm w ith a stiff ness of 1 N/m m in both sides of boundary for all ex perimen ts w ith the update frequency of 1kHz. The s urface is desired elastic surface. There is no friction along th e surface, only contact force in radial direc tion. The com puter-controlled robot w ill record the hand position in Cartesian coordinates in 3D s pace and the contact force on the h and correspo nding to the position of h and in three directions w ith a 10ms s ample interval. The computer can automati cally count the number o f movements and show the num ber on the screen by a Graphic User Interf ace implem ented by MS VC++ for m onitoring the entire experim ent. Move ments were s eparated by m eans of a sm all velocity thres hold 0.005m/s . A tone after each movem ent provided feedback to help maintain the mov emen t speed betw een 0.6 and 1.0 m /s. −0.2 −0.1 0 0.1 0.2 −0.2 −0.1 0 0.1 0.2 −0.2 −0.1 0 0.1 0.2 x (m) Cost function: C = 366.3677 [m.s −3 ] 2 .s y (m) z (m) geodesic min jerk 0 0.2 0.4 0.6 0.8 0 0.2 0.4 0.6 0.8 time (s) tangential velocity (m.s −1 ) 0 0.2 0.4 0.6 0.8 −20 0 20 40 60 time (s) tangential jerk (m.s −3 ) Figure 1 Configur atio n of exp eriment: A. Subjects were seat ed and held the hand le of the lightweight PHANToM robotic device; B. There w as never an y men tion of the cons training surface. Bef ore the experim ent, subjects were show n the th ree real targets on an equilateral triangle they would attem pt to move to in the experiment in the right front of su bj ect; C. Geodesi c and numeri cal so lution o f minimum jer k m ove ment along spherical surface. It show s that the m inim um jerk solution over a sphere tak es place on a geodesic s egmen t (right). Two graphs in left column are the tang ential velocity and tangential jerk of reaching m ovemen t along surface respectively. The profiles of tangential velocity and jerk are similar to the profiles of reaching m ovemen ts in free space [3] Experim ents . A total of twenty -two righ t-handed, health y su bjects wi th no hi story of ort hopedic or neuro logica l diso rder s volunt eered to participate (age 25- 42; 12 male, 10 f emale). Bef ore beginn ing th e experim ent, each subject sig ned a consen t form that con formed to federal and Northwestern University guidelines. Subjects were seat ed and held the hand le of the lightweight Phantom TM robotic device. Three targets w ere used in these experim ents. The targets w ere located in front of the subjects, at the vertices of an equilateral triangle, which w as contained on the horizontal plane at 80m m above th e center of the c onstra int spher e (Figur e 1B ). T he highest point of the sphere w as s ituated about 30 cm bel ow t he right shoulder, centered directly in front of th e subject. During the experim ent, subjects could not see eith er the targets or their h and. They w ere required to mem orize the locations of the three targets and then they w ere blindf olded. This paradig m w as adopted to avoid ef fects induced by geom etrical biases that could be induced by the visu al system s. Since the experim ent w as n ot aimin g at assessin g the accuracy of target reachin g, the sim plest approach w as to remov e all visual inpu ts. There w ere tw o 100mm A B C phases in the experim ent, i.e. training (only on right si de) and test (on lef t side). To avoid m uscle f atigu e, subjects w ere asked to rest for 20 seconds or l onger every 40 mov e men ts . Analysi s – theoretical min imu m jerk . We calculated theoretical m inimu m-jerk trajectories on a spherical surface by extending the optimization problem of Flash and H ogan [ 3, 7 ], d efined as the movement that minimizes the tim e integral of the square of the rate of change of acceleration. This is a stan da rd constrained optim ization problem represented by the cost f unction ∫ + + + = f t dt z y x g dt z d dt y d dt x d C 0 2 3 3 2 3 3 2 3 3 , ) , , ( λ (1) w here λ is a Lagrange m ultiplier penalizing the undesired penetration into th e constraining surface g, a h emisphere: , 0 ) , , ( 2 2 2 2 = − + + = r z y x z y x g (2) w here r is the radius of the sphere. By using the optimal method to solve an Euler-Poisson equation [9], the result ing problem is a tw o-poin t boundary -valu e problem with 18 bo undary conditions, where a direct, analytical solution is not po ssible. We used the MATLAB BVP4 C fun ction to calculate a m inim um- jerk trajectory for an arbitrary s urface. For the experim ents of this study , the shortes t path betw een tw o point s on a sphere is the geod esic, fo rmed b y passing a p lane thr ough the center of the sphere, th e start and the end poin t of the m ovement . Optimization results converged to the g eod esic path (blue traces in Figu res 1B and C), with a bell-sh aped speed profile that resembled the solutions obtained on the plane. Analys is . Tangential velocity w as derived after fitting the sample d movement po ints with eight-or der poly nomi als. Movem ents were se parated usi ng s peed thresh olds (above 0.025 m /s). The ha ptic servi ce loop w as updated at 1 k Hz and data w ere sam pled and st ored at 100 Hz. H ypotheses were t ested using si gned-ra nk paire d tests (with distribution of data is non norm al) at an alpha level of 0.05. We measu red two perf orman ce parameters associated w ith constrained m otions: the average distan ce error and the av erage contact force. The average dis tance error of one m ovem ent w as defin ed as the av erage differen ce between th e trajectory and the corres ponding idea l, minimum je rk movement d ivided by the le ngth of mi nimu m jerk m oveme nt. Averag e contact force (A CF) w as defined as s um of distance w eighted con tact forces at each sample divided by the leng th of trajectory. C ontact force variance is the variance of A CF. Velocity prof ile error is the area error betw een th e actual tang ential velocit y profile an d the correspon ding m inim um -jerk velocity profile. Sum of square jerk is the integral of squar ed j erk in the movement dura tion. 3. Results We asked 22 su bjects to execute repeated mov ement s of the right dom inant hand w hile holding the free extrem ity of a Phantom 3.0 haptic in terface (Figure 1A ). The haptic interface wa s programm ed to generate a spherical surface of 20cm radius. Su bjects were gi ven no inform ation or instru ction about the su rface. To suppress all influences from the visual sy stem, th ey w ere blindf olded and aske d to move t heir hand bet ween three remem bered targets (Fig ure 1B), about 30 cm apart from each other, on th e corners of an equilateral triangle th at intersected horizontally the spherical surface. Tw o sets of movem ents were considered in this experiment: test movem ents, on the left side of the triangle, and training movements, o n the r ight side of the tr iangle. Fi gures 2 a nd 3 sum marize th e experiment al results obtained f rom a subject, w ho displayed a ty pical learning pattern. In th e initial phase of the experiment, su bjects executed for o ne and half minutes a number of t est movements (6 0 tri als). These initial trajectories did not follow a min imum -jerk pattern and they follow ed distinctly non-geodesic pathway s. After this initial phase, subjects were asked to execute repeated movem ents betw een the targets on the right side of the triangle. This training phase lasted about nine minut es, during w hich subjects execu ted 300 movem ents. The trajecto ries during the initial m inute of the trainin g phases w ere also m arkedly differen t from the corresponding geodesic m otions betw een the sa me targ ets. How ever, by the en d of the trainin g phase, the trajectories had shifted toward the m inimu m-jerk pattern. It is evident that training led to a significant shif t of movements tow ard the geodesic path (Figures 2B, 3 Aand 3B). In addition, the velocity profiles ( Figure 2C) converged tow ard the bell-shaped profile of the minim um -jerk velocity. At the end of th e training ph ase, subjects repeated a set of test mov ements (left side of th e triangle) f or one an d half minutes. We found that the test movements ( Figure 2 ) were shifted toward the geodesic, minim um- je rk pathway as a consequ ence of trainin g with a different set of movem ents. This fact constitutes a generalization of learnin g, wh ich strongl y supports the hy pothesis that th e subject developed a represen tation of the con straint surface, rath er than m erely learning how to locally improv e smooth ness. Som e evidences f or shape learn ing are as follow s. Average Path Deviation s (APD) A s stated above, min imu m-jerk m ovemen ts take place alon g the geodesic segmen t jo ining start an d end p ositions. A n intuitiv e meas ure of sm oothness is th erefore the path deviation away from this geodesic s egmen t. T o quantif y th e degree of similarity between the path of th e hand and the geodesic path jo ining start and end location, w e m easured the average dis tance between the tw o paths. The tem poral evolution over repeated trials of this averag e distance for the same su bj ect is shown in Figure 3A. Similar findings apply to the majority of th e subjects (Figure 3B). Over the entire subject populati on, there w as a sign ificant redu ction of dist ance betw een hand m ovem ent and g eodesic path (populati on average redu ction 12%, p< 0.008) in the training set. There was als o a sign ificant reduction of distance betw een han d movem ent and geodes ic path (populati on average reduction 10%, p< 0.035) i n the tes t set. However, reduction in APD w as not observed in all subjects. Over 70% of cases, subjects sh owed th e tende ncy to genera te hand paths c loser to geo desic segments bo th in tra ining and in test m ove ments (Figure 3F). −200 −100 0 100 200 −200 −100 0 100 200 0 100 200 x (mm) Initial training and test y (mm) z (mm) A −200 −100 0 100 200 −200 −100 0 100 200 0 100 200 x (mm) Final training and test y (mm) z (mm) B 0 0.2 0.4 0.6 0.8 1 Forward Velocity (m/s) C Backward Initial test 0 0.2 0.4 0.6 0.8 1 Velocity (m/s) Initial training 0 0.2 0.4 0.6 0.8 1 Velocity (m/s) Final test 0 50 100 150 0 0.2 0.4 0.6 0.8 1 Sample interval (10ms) Velocity (m/s) 0 50 100 150 Sample interval (10ms) Final training Figure 2 Tr ajectories and tangential velocity profiles: first colum n ( A, B ) is the dr aw ing of initial and final training and test tr ajectories; last two columns ( C ) are th e drawings of tangential velocities; solid thin lines are the actual trajectories in A, B and velocity profiles in C ; blue lines represent forw ard m ovemen ts from proxim al to distal target and red lines represent back ward m ovemen ts (distal to pro xim al); solid black thick lines represent the average trajectories and velocities; so lid green thick lines represent minim um jerk solutions. Average Contact Forces (ACF) The red uction in contact force is an additional indication that the subject developed a representation of the spherical s urface, as th e amou nt of const ant force is proportional to th e degree of penetration within the boundary of the sphere. We meas ured the average constrain t force directed toward th e center of th e sphere (Figure 3C). The constraint force decreased betw een start and en d of th e experim ent, both for the traini ng and for the test movements. However, the scatte r plo t of change in APD versus change in A CF (Figure 3E) and the related Ch i square analy sis indicate that the APD and ACF are statistically independent ( 8415 . 3 21558 . 0 2 05 . 0 2 = < = χ χ ). T his is consistent with the hy pothesis that th e increase of sm oothness and the decrease of con tact force are gen erated by independent processes, w hich both con tribute to learning the surface’ s geom etry. Over the enti re subject population , there w as a sign ificant reducti on of contact forces (population av erage reduction 29%, p< 0.00025) in the t raining set; there wa s also a sig nifican t reduction of contact forces (popu lation average redu ction 39%, p< 0.0000002) in the tes t set (Figure 3D). A reduction in contact f orces (training and test) w as observed in over 80% of cas es (Figu re 3F). How ever, only 60% of su bjects reduced both path deviation an d contact force. 20 40 60 80 100 0 50 100 150 Individual APD (mm) A forward fitting backward fitting 20 40 60 80 100 0 1 2 3 4 5 ACF (N) Index of training movements C Training Test 0 20 40 60 80 100 Population APD (mm) p<0.0072716 p<0.032708 B Initial Final Training Test 0 0.5 1 1.5 2 2.5 3 3.5 4 ACF (N) p<0.00021607 p<1.9409e−007 Phase of experiment D −6 −4 −2 0 2 −50 0 50 χ 2 =0.21558<3.8415 Independence! Change in ACF (N) Change in APD (mm) E training test APD ACF APD&ACF 0 20 40 60 80 100 Measures Probability of reduction (%) F training test both Figure 3 Av erage Path Deviations ( APD ) and Average Contact Force ( ACF ): A an d C are the temporal evolu tion of APD and A CF with practice for a typical subject; all other plots sh ow res ults f or the entire s ubject populati on; panels (B) and (D) s how the reduction in APD an d ACF, respectively , in the train ing and test trajectories. These changes are all signif icant (p<0.05); E is the scatter plot of APD c hange versus ACF cha nge in ACF. Chi square analy sis indicates that the APD and ACF are indepen dent ( 8415 . 3 21558 . 0 2 05 . 0 2 = < = χ χ ); F is an estim ate of the probab ility of th e reduction in APD and ACF. Over 70% of su bjects reduce path dev iation, ov er 80% of subjects reduce contact f orce and over 60% of subjects reduce bot h path deviation and contact force. 20 40 60 80 100 0 1 2 3 4 5 Individual CFV (N 2 ) A forward fitting backward fitting 20 40 60 80 100 0 1 2 3 4 5 ACF (N) Index of training movements C Training Test 0 0.5 1 1.5 2 2.5 3 3.5 4 Population CFV (N 2 ) p<5.6682e−005 p<0.00071345 B Initial Final Training Test 0 0.5 1 1.5 2 2.5 3 3.5 4 ACF (N) p<0.00021607 p<1.9409e−007 Phase of experiment D −6 −4 −2 0 2 −8 −6 −4 −2 0 2 χ 2 =20.8643>3.8415 Dependence! Change in ACF (N) Change in CFV (N 2 ) E training test CFV ACF CFV&ACF 0 20 40 60 80 100 Measures Probability of reduction (%) F training test both Figure 4 Contact Force Variations ( CFV ) and A verage Contact Force ( ACF ): to compare CFV w ith ACF, A CF is plotted ag ain here, A and C are res pectively for CF V and ACF of one typical su bject in the training phase; both CFV and AC F reduce for training and test ( B, D ); E show s th e scatter plot of CFV vs . ACF , Chi square analy sis indicate that the chan ge in CFV and th e change in ACF are depen dent ( 8415 . 3 8643 . 20 2 05 . 0 2 = > = χ χ ) ( E ); F show s th at over 75% of s ubjects reduce CFV, ov er 80% of su bjects reduce AC F and over 70% of subjects reduce both C FV and AC F. Contact Force Variance (CFV) We also measured the variance of contact force. CFV is another measu re of movement smoothne ss. Actua lly, CFV refle cts the changes of penetrations along the surf ace. If CFV is big in size, the movement is no t smooth and vice ver sa. It is evident that CFV decreased betw een start and end of the expe riment (Figur e 4 A), bo th for the tr aining and for the test m ovem ents. Over t he entire s ubject populat ion, there w as a sign ificant redu ction of CF V (population av erage reduction 59%, p< 0.00006) in the t raining set; there wa s also a sig nifican t reduction of CFV (populati on average reduction 50%, p< 0.00007) in the t est set (F igure 3B). Chi square an alysis indicates that the CFV and ACF are stro ngly depend ent ( 8415 . 3 8643 . 20 2 05 . 0 2 = > = χ χ ) (Figure 4E). Over 70% of cases, this ten dency corresponded to a reduction in CFV (Fig ure 4F). Whil e over 65% of subjects reduce bot h CFV and A CF (Figure 4F). 20 40 60 80 100 0 0.05 0.1 0.15 0.2 0.25 Individual VPE (m) A forward fitting backward fitting 20 40 60 80 100 0 1000 2000 3000 4000 5000 SSJ (m/s 3 ) 2 s Index of training movements C Training Test 0 0.05 0.1 Population VPE (m) p<0.00028405 p<2.0477e−005 B Initial Final Training Test 0 500 1000 1500 2000 SSJ (m/s 3 ) 2 s p<0.08206 p<0.39426 Phase of experiment D −8000 −6000 −4000 −2000 0 2000 −0.15 −0.1 −0.05 0 0.05 χ 2 =1.4211<3.8415 Independence! Change in SSJ (m/s 3 ) 2 s Change in VPE (m) E training test VPE SSJ VPE&SSJ 0 20 40 60 80 100 Measures Probability of reduction (%) F training test both Figure 5 Velocity Profile Error ( VPE ) and S um of Square J erk ( SSJ ): same as dis plays of fig ure 3, A and C are the results of VPE and SSJ of one typical su bject in trainin g phase, w hile others are deal w ith th e populat ion results; B show s that th e reductions of VPE both for trainin g and test are sig nifican t (p<0.0003); D shows there is a tr end in the reduction of SSJ bo th for training an d test, but they are not signif icant (p>0.08); again th e Chi square analy sis indicates that VPE and SSJ are independent ( 8415 . 3 4211 . 1 2 05 . 0 2 = < = χ χ ) ( E ); F indicates over 70% of subjects reduce VPE, ov er 60% of subjects reduce SSJ and over 40% of subjects redu ce both VPE and SS J. Velocity Profile Error (VPE) VPE is the area between the actual tangen tial velocity and the optimal min imu m-jerk velocity . PVE can be used to meas ure mov emen t smoot hness from an other perspecti ve. The sm all VPE is, the smoothes t the reaching movem ent. VPE decreased between start and end of th e experimen t (Figure 5A), bo th fo r the tra ining and for the test movements. Over the entire subject popul ation, there w as a sig nifican t reduction of VPE (population av erage reduction 23%, p< 0.0003) in th e training s et; there w as also a sig nifican t reduction of VPE (population av erage reduction 20%, p< 0.00003) in the test set (Figu re 5B). Over 70% of cas es, this tendency corre sponded to a re duction in CFV (Figure 5F). Sum of Square Jerk (SSJ) It is evident that SSJ decreased between start and end of th e experimen t (Figure 4A), bo th fo r the tra ining and for the test movements. Over the en tire subject populat ion, there w as a tendency reduction of SSJ (populat ion average redu ction 31%, p= 0.1545) in th e training s et; there w as also a t endency reduction of CFV (popu lation averag e reduction 19%, p= 0.3566) in the test set (Figure 5B). Ch i square an alysis indicates that VPE and SSJ are independent ( 8415 . 3 4211 . 1 2 05 . 0 2 = < = χ χ ) (Figu re 5E). This may reflect the f act that the velocity profile and SSJ are not only dependent on the path bu t also on the time of move ment. Ov er 70% of cases, this tendency corresponded to a redu ction in VPE (Figure 5F). Whil e over 42% of subjects reduce bot h VPE and SS J (Figu re 5F). 4. Discussion The evidence described in th is paper in dicates that through rep eated movements over a spherical surface, subjects acquire im plicit know ledge of the su rface geom etry, as in dicated by the reduction in contact force and by the increase in smoothn ess. This study was motivated by the observ ation that the ex ecution of sm ooth mov ements over curved su rfaces requires (or implies) a for of im plicit know ledge about th e surface geom etry. Maxim ally sm ooth trajectories over the s urface of a sphere take place over a se gmen t of geodesic. The determination of a geodesic segment on a sphere involves know ledge about the center of th e sphere and its radius . How ever, it is also possible to argu e that a geodesic segm ent may be identified by a mechanis m that en forces local smoothness, w ithout any explicit know ledge of geom etric parameters of the surface. In this case how ever, one may still argue that the ability to generate sm ooth movem ents over large territo ries of the sphere is de facto equiva lent to the kno wledge of suc h para meters, We ha ve begun t his study by formulating the narr ow hypothesis that, through r epetition o f reaching movements, subj ects would tend to produc e minimu m- jerk mov ement s, as had been obs erved w ith reaching mov ements in free space [2, 3]. Howev er, the data appear to co ntrad ict thi s hypothesis: while we have obser ved a significa nt tre nd to ward smoother movements over the sphere, the hand paths appear to conv erge tow ard a path that w as dif ferent f rom th e geodesic path of a m inim um - jerk trajectory . While it is possible t hat a m ore prolonged exposure to the su rface may lead to furth er reduction in jer k, the ava ilable data ( e.g. Fi gure 3A) sugge st that a plateau m ight hav e been reached by the end of the train ing period. How ever, no such plateau is evident in th e sum of square jerk (Fig 5C). Our data indicate a tendency toward smoother movements, but the y also suggest the possib ility of a convergence to m ovemen ts that are suboptim al w ith resp ect to jer k minimization. Doe s this suggest a differ ent criterion? Earlier studies have framed the stu dy of arm m otion between tw o alternative m odels: o ptimization of kinematics ( jer k, smoothness) or o ptimizat ion of a dynamic functi onal, such as minimum torque change [10 ] In kinem atical models , only the g eometrical and tem poral proper ties of motion are consid ered, and th e variables of interest are the positions (e.g. joint ang les or hand Cartesian coordinates) and their corresp onding v elocities, accelerations and h igher derivativ es. Based on the observation that skilled reaching m ovements of the hand are sm ooth w hen descri bed in C artesian coordinates [1, 3], Hogan and F lash proposed th at the su m of squared third derivative of Cartesain hand position, i.e. ‘jerk’ is mi nimized ov er the time s pan of m ovemen t [2, 3]. In contrast, dy namic m odels place the em phasis on v ariables such as jo int torques , forces acting on th e hand and mus cl e c o mma nd s [ 1 1] . B ot h mi ni mum j er k hyp o t he si s and minimum torq ue-change hypo thesis p rod uce a uniq ue soluti on, give n the movement dur atio n and suitable boundary conditions of the initial an d final position an d velocity. The m inimum jerk model alw ays pred icts straight-line Cartesian hand paths w ith bell-shaped velocity profiles: the hand trajector y is determ ined only by the hand kinem atics and its shape is invariant w ith respect to the region of the w orkspace. The min imu m torqu e- change mod e pr edict s roughly str aight hand paths when the dy namics of the arm doesn’t chan ge too m uch duri ng the motion, for instance, if two targets located approxim ately in fron t of the body [12, 13]. If the targ ets are far from each other, th e hand paths of the tw o m odels are quite different, w hile the h and speed profiles are similar. In the minimum torq ue-change m od el, the hand path is a gently convex cu rve that is consistent w ith the empirical data for the free m ovemen t in the uncon strained horizontal plan e [11]. Also, studies o f more co mplex movements aro und an obs tacle suggest tha t infor mation ab out the dynamics of the arm is used in planning obstacle avoidan ce mov ements [14]. Indeed, subjects tend to select their m ovem ent paths that are perpendicular to the directio n in w hich the arm is least sensitive w hen passing the n ear point [14]. Similarly , external mov ement con straints m ay aff ect kinem atics of the hand. For ex ample, w hen the han d moves in free space the path tends to be more curved than the path m ade in physical conta ct with a tab leto p suggest ing that diffe rent control strateg ies are involved, f or constrained and f ree mov e men ts [1 5 ] . The observation of a trend to reducing contact f orces, in parallel to the trend to w ard smoothness is consistent to the presence of dynam ic factors th at combined with kinematica l pla nning shape the re sulting hand m ot ion. One elem ent of caution in interpreting our data should come from the consideration that th e geodesic segm ents are solutions for the m inim um -jerk problem ov er a rigid curved surf ace, whereas th e experimen ts w ere carried over a co mpliant vir tual sphe re, While the decrease of con tact force w as s tatistically independent of the increase in sm oothnes s, furth er analy sis indicated a strong dependence betw een average contract force an d contact force variation s. This observation is consistent w ith a possib le role of signal- dependent noise - characteristic of neu romuscu lar syst ems [16] in shapin g the im plicit learning of surf ace properties. Following this appro ach, one m ay speculate that the reduction of contact force m ay be achiev ed by a learni ng mech anism th at aims at reducin g fluctuation s of this varia ble d uring the executio n of co nstrai ned movements. 5. Conclusions In sum mary, th e repeated haptic interaction with a curved surf ace leads to two parallel patterns of learning: a) a trend tow ard sm oother move ments over the surf ace and b) a trend tow ard sm aller interaction forces. These two trends appear to be statistically independent and both correspond to th e developm ent of a m otor represent ation of the su rface geom etrical features. 6. References [1] P. Morasso, "Spatial con trol of arm mov emen ts," Experimental Brain Research , v ol. 42, pp. 223-227, 1981. [2] N. Ho gan, " An orga nizing p rincip le fo r a cla ss of volunta ry movements," Journal of Neurosci ence , vol. 4, pp. 2745-54, 1984. [3] T. Flash and N. Ho gan, " The coor dinat ion of a rm movem ents: A n experim entally con firmed m athem atical model ," Journal of Neuros cience , vol. 5, pp. 1688- 1703, 1985. [4] P. DiZio and J . Lackn er, " Congenitally blind indiv iduals rapidl y adapt to C oriolis force pert urbations of their reaching movem ents," Journal of N europhysiology , vol. 84, pp. 2175- 2180, 2000. [5] R. Miall and P. Hagg ard, "T he curvatu re of hum an arm movem ents in th e absence of vis ual experience," Experiment al Brain Resear ch , vol. 103, pp. 421-428, 1995. [6] R. L. Bi shop and S . I. Goldberg, Tensor Analysis on Manifol ds . New York, NY: Dov er, 1980. [7] I. M. Gelfand an d S. V. Fom in, Calcul us of Variati ons . Englew ood Cli ffs, NJ: Pren tice Hall, 1963. [8] J. K. Salisb ury and M. A. Srinivasan, "Phantom- based haptic interaction with virtu al ob jects," IEEE Comput. Gr aph. Appl. , vol. 17, pp. 6- 10, 1997. [9] A. E. Bry son an d Y.-C. Ho, Applied Optimal Control : Optimizat ion, Estimat ion, and Control . New York: He mis phere Publis hing Corporation, 1975. [10] D. M. Wolpert, Z. Gharam ani, and M. I. Jordan, "Are arm trajectories plann ed in kin ematic or dynam ic coordinates? An adaptation study ," Experim ental Brain Research , vol . 103, pp. 460-470, 1995. [11] Y. Uno, M. Kaw ato, and R . Suzuk i, "Formation and control of optimal trajectories in human m ultijoint arm movements: Mi nimum torque-c hange mode l," Biological C ybernetics , v ol. 61, pp. 89-101, 1989. [12] J. A. S. K elso, D. L. S outhard, and D . Goodman, "On the nature of hum an interlim b coo rdination," Science , vol. 203, pp. 1029- 1031, 1979. [13] C. G. Atk eson and J. M. Hollerbach, "Kinem atic features of unrestrained v ertical arm m ovemen ts," Journal of Neuros cience , vol. 5., pp. 2318- 2330, 1985. [14] P. Sabes and M. I. Jordan, "Obstacle avoidance and a Perturbatio n sensitivity model for motor planning ," Journal of N euroscience , vol . 17, pp. 7119-7128, 1997. [15] M. Desm urget, M. Jordan, C. Prablanc, an d M. Jea nnerod , " Constra ined a nd Unco nstraine d Mo vements Invol ve Differ ent Cont rol Str ategi es," Journal of Neurophys iology , vol . 77, pp. 1644-1650, 1997. [16] C. M. Harris and D. M. W olpert, "Signal- dependent noise determines motor planning ," Nature , vol. 394, pp. 780-784, 1998.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment