Computing the obstacle number of a plane graph
An obstacle representation of a plane graph G is V(G) together with a set of opaque polygonal obstacles such that G is the visibility graph on V(G) determined by the obstacles. We investigate the problem of computing an obstacle representation of a p…
Authors: Matthew P. Johnson, Deniz Sarioz
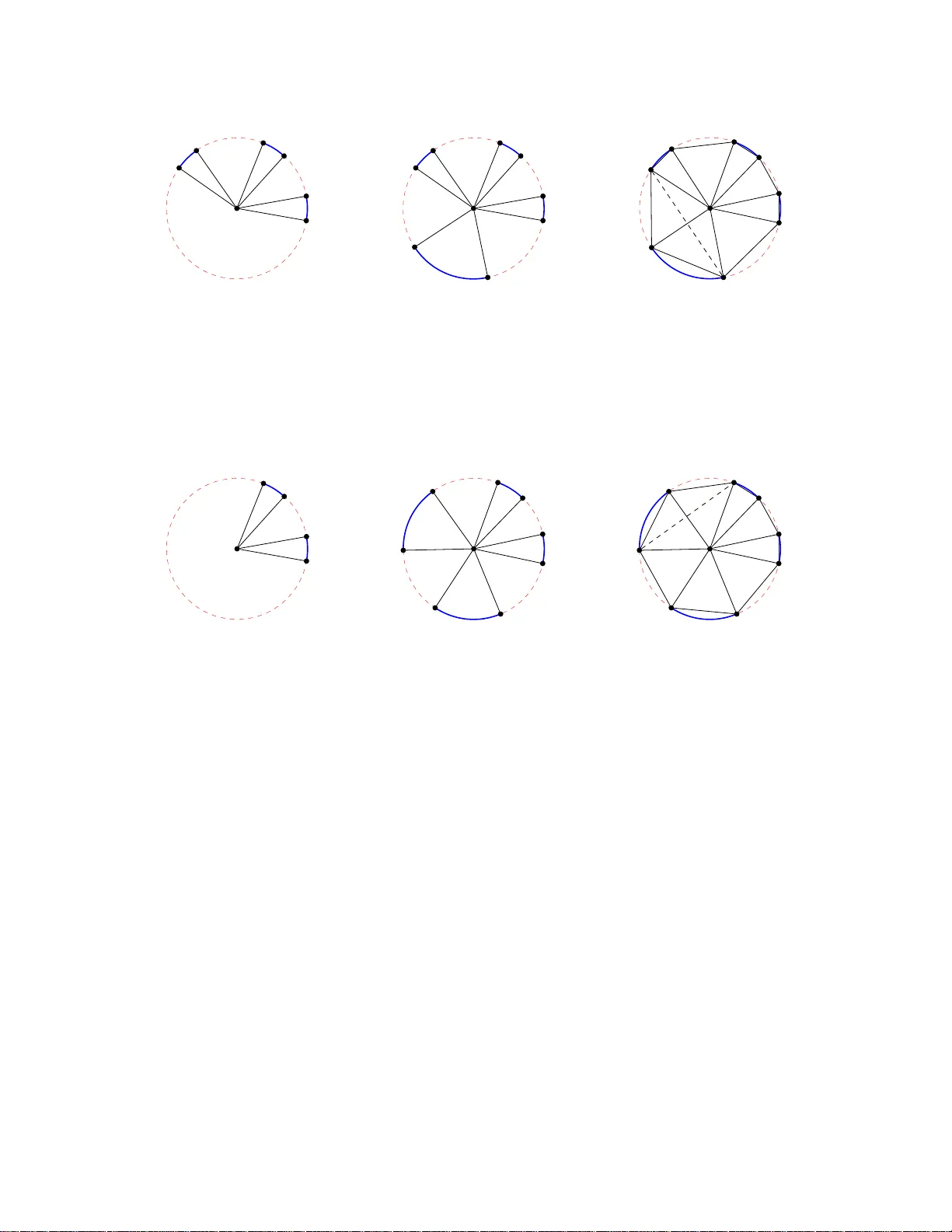
Computing the Obstacle Num b er of a Plane Graph Matthew P . Johnson 1 and Deniz Sarı¨ oz ∗ 2 1 P ennsylv ania Stat e Univ ersit y 2 The Graduate Sc ho ol and Univ ersity Cen ter of The Cit y Univ ersit y of New Y ork No ve m b er 14 , 20 18 Abstract An obstacle r epr esentation of a plane gr aph G is V ( G ) together with a set of opaq ue po lygonal obstacles s uc h that G is the visibility g raph o n V ( G ) determined by the o bstacles. W e in vestigate the pr oblem of computing a n obstacle representation of a plane graph (ORPG) with a minim um nu m ber of obstacles. W e call this minimum size the obstacle numb er of G . First, we sho w that ORPG is NP-har d by reduction from planar v er tex co ver, resolving a question pos ed by [8]. Second, we give a reduction from ORPG to ma xim um degree 3 planar vertex cov e r. Since this reduction preserves solution v alues, it follows that ORPG is fixed parameter tra ctable (FPT) a nd admits a po lynomial-time approximation scheme (PT AS). 1 In tro duction Let G b e a plane graph with straigh t edges and ve r tic es in general p osition; that is, a straigh t-line dra w ing of a planar graph with no edge crossings and no thr ee v ertices on a line in w hic h the v ertices are identified w ith their p ositions. W e refer to the op en line segmen t b etw een a pair of non-adjacen t graph v ertices as a non-e dge of D . An obstacle r epr esentation of G is a pair ( V ( G ) , O ) where O is a set of p olygons (not n ec essarily conv ex) called obstacles , suc h that: 1. G do es not m ee t an y obstacle, and 2. eve r y non-edge of G meets at least one obstacle . Equiv alen tly , G is th e visibilit y graph on V ( G ) determined by the obstacles in O . The size of an obstacle represent ation is the cardinalit y of O . Denote by ORPG the problem of computing a minim u m-size obs tacle represen tation of G (the optim um of which is call ed the obstacle numb er of G ). Alp ert, Ko c h , and Laison introdu ced the notions obstacle r epr esentation and obstacle numb er for abstract graphs [2] and noted that in an y minim al obstacle repr esentati on, eac h obstacle can b e iden tified with the face it lies in. Hence, we w ill use the terms fac e and obstacle in terc hangeably . If the faces h a v e w eigh ts then w e can seek a minimum-w eigh t obstacle represen tation. ∗ Researc h su pported by grants from NSA (471 49-0001) and PSC-CUNY (63427-0041 ). Finding a minim um-size obstacle r epresen tation of a str a igh t-line graph dra win g w as treated as a computational problem in the setting in whic h D and G need not b e planar [8]. This p r ob- lem w as r educed to hyp ergraph transversal (hitting set), with O ( n 4 ) faces a v ailable to p ie rce O ( n 2 ) non-edges ( O ( n ) faces and Θ( n 2 ) non-edges in the ORPG sp ecial case). A rand omized O (log OP T )-approximat ion algorithm based on b oundin g the V apnik-Chervonenkis d im en sion of the co rresp onding h yp ergraph family was given in [8 ]. Left op en w as the question of whether better appro xim ations or p erhaps optimal algorithms were feasible. In th is note w e giv e partial ans wers to that question. W e show that computing the obstacle n u m b er is NP-hard already in the sp ecial case of plane graphs; nonetheless, we sho w that OR P G admits a p olynomial-time app ro ximation scheme (PT AS) and is fixed-parameter tractable (FPT). W e sho w hard ness b y a redu ct ion fr om planar ve rtex co v er; the p ositiv e resu lts are consequences of a solution v alue-preserving reduction to m aximum d eg ree 3 planar vertex co ver. 2 Reduction from planar v ertex co v er Theorem 2.1. ORPG is NP-har d. Pr o o f. W e redu ce from planar v ertex co v er . Recall th at in the decision v ersion of planar v ertex co v er, we are given an abstr act planar graph G h a ving (without loss of generalit y) no isolated v ertex, and a num b er k . Let n = | V ( G ) | , m = | E ( G ) | , and denote by f the num b er of faces in any crossing-free planar dra wing of G . W e will transform G in p olynomial time int o a plane graph G ′ in suc h a w ay that G has a vertex co v er of size k if and only if G ′ has an obstacle representa tion of size k ′ (for k ′ defined b elo w ). First, we construct fr o m the planar v ertex co ve r instance G a planar ve r tex co v er pr oblem instance G 3 with maximum degree 3, adapting and extending the construction of [6]. The graph G 3 admits a v ertex cov er of size k ′ if and only if G admits a v ertex cov er of size k . Seco nd, we construct an ORPG instance G ′ in suc h a w a y that an obstacle represen tation of G ′ will corresp ond to a v ertex co v er of G 3 of the same size, and vice v ersa. Constructing the maximum degree 3 planar vertex co v er instance G 3 . The planar graph G 3 is co nstructed as follo ws. W e transform eac h vertex v i of G in to a cycle C i of length 2 b i , with b i ∈ deg( v i ) + { 0 , 1 , 2 } (with the exact v a lue decided b elo w). W e color the vertic es of C i alternating b et w een blue and red. W e then create a single leaf vertex z i adjacen t to some arbitrary r ed vertex of C i . W e transf orm eac h edge ( v i , v j ) of G in to a path P ij with thr e e ed g es whose end points are distinct blu e vertice s of C i and C j . W e finally create f copies of the 3-v ertex path graph P 3 , ea ch constituting a comp onen t of G 3 . W e claim that G has a verte x co v er of size at most k if and only if G 3 has one of size at most k ′ = k + f + m + P i b i . ( ⇒ ): F or eac h verte x v i in a giv en v er tex co ver for G of size k , we select z i and all the blue v ertices of C i , th us including an endp oin t of eac h p a th P ij ; and for eac h v i not in the co ve r , w e select all the red v ertices of C i (a total so far of k + P i b i v ertices). Since for every path P ij at least one of the cycles C i and C j will ha ve all its blu e v ertices chosen, th us including at least one endp oin t of P ij , choosing one inte rnal ve rtex from eac h P ij ( m more), and the cen tr al ve rtex of eac h P 3 ( f more) su ffices to co mplete a size k ′ v ertex co ve r for G 3 . ( ⇐ ): Giv en a v ertex co v er for G 3 of size k ′ , w e obtain a canonical ve r tex co v er for G 3 of size k ′′ ≤ k ′ in the follo wing wa y . E ach cop y of P 3 con tribu tes at least one v ertex to a co ver, so ha ve 2 u i u j t ij v ij t j i v j i D i D j R ij (a) Bold drawi ng of vertice s u i , u j and edge u i u j . u i u j t ij v ij t j i v j i (b) Edge gadget in ˜ G fo r edge u i u j of G . Figure 1: Bold dra wing and edge ga dget for an ed g e of G . it con tribute exactly its cen tral vertex, for a total of f vertic es. Eac h path P ij con tribu tes at least one of its int ernal v ertices to co v er its cen tral edge. If b oth int ernal v ertices of a path P ij are in the giv en co ver, tak e one in tern al v ertex out and en s ure that its blue neigh b or is in , whic h mak es for m internal v ertices from these paths. Note that ev ery cycle C i con tribu tes at least b i v ertices, lest some edge of the cycle b e un co v ered. Th is holds with equ ality only if C i con tribu tes (including ‘its’ z i ) exactly its r ed vertice s. Otherwise, ensure that C i con tribu tes exactly 1 + b i v ertices: ‘its’ z i and its b lue v ertices. Denote by k ′′ the size of this resulting canonical vertex co v er. The cycles in G 3 con tribu tin g blu e v ertices therefore corresp ond to a v ertex co ver for G of size k ′′ − f − m − P i b i ≤ k ′ − f − m − P i b i = k . Constructing the ORPG instance ˜ G . In the remainder of the p roof, w e show how to “imple- men t” the graph G 3 as an equiv alen t ORPG problem in stance . The basic b uilding blo c ks of the construction are empty triangles and diamo nds . An empty triangle is a face of a plane graph that is sur rounded by three edges and has no v ertex inside. A diamond consists of t wo empty triangles sharing an edge and ha ving their four vertice s in co n vex p ositio n. O bserv e that a diamond con tains a non-edge b et wee n t wo of its vertic es. Hence at least one empt y triangle of ev ery diamond m ust b e c hosen in an obstacle r epresen tation. The f copies of P 3 in G 3 will matc h th e faces of ˜ G b esides empt y triangles, all of whic h m u st b e c hosen. T h e r emainin g vertic es of G 3 will matc h the empty triangles of ˜ G , such that the edges among them matc h the diamond s of ˜ G . Hence there will b e a natural bij ection b et wee n verte x co v ers of G 3 and obs ta cle representat ions of ˜ G . T o b eg in the construction, w e use the linear-time algorithm of de F r a ysseix, P ac h, and Polla c k [4] to obtain a planar imbedd ing of G on a O ( n ) × O ( n ) p ortion of the integ er lattice and then p erturb the co ordinates to obtain general p osition. (W e do n ot d istinguish b et w een G and this im b eddin g. ) W e fir st visu a lize ˜ G as a b old dr a wing [9] of G , whose vertic es are represente d by small disks and edges by solid rectangles: we dr a w eac h v ertex u i of G as a disk D i ab out u i (with b oundary ˜ C i ), and ev ery edge u i u j as a solid rectangle R ij . See Fig. 1(a). Eac h R ij has t wo v ertices t ij , v ij on ˜ C i and t wo v ertices t j i , v j i on ˜ C j suc h that the line u i u j is a midline of R ij , and t ij u i v ij t j i u j v j i is a coun terclo c kwise ordering of the v ertices of a conv ex hexagon. W e dra w the disks small en ough to ensur e that they are w ell-separated fr om one another. W e set the r adius r of ev ery disk to the s m al ler of 1/4 and half of the minimum distance b et we en a v ertex u i and an edge u j u k ( j 6 = i 6 = k ) of G . T o fix a single width for all rec tangles (i.e ., || t ij − v ij || ), w e set a global angle measure α to the smaller of 45 ◦ and half of the sm al lest an gle b et we en t wo edges of E ( G ) inciden t on the same verte x of V ( G ) . ˜ G is m o deled on the b old d ra wing, by implemen ting eac h edge of G (path P ij of G 3 ) with an 3 u i t i 0 v i 0 t i 1 v i 1 t i 2 v i 2 (a) In itia l circle with blue (sol id ) arcs of measure α and red (dashed) arcs has a large red arc of measure in [180 ◦ − α , 270 ◦ ). u i t i 0 v i 0 t i 1 v i 1 t i 2 v i 2 v i t i (b) After sub dividing the large red arc into thr e e , colori n g its middle part blue, and adding dumm y v i and t i vertices . u i t i 0 v i 0 t i 1 v i 1 t i 2 v i 2 v i t i (c) In the resulting wheel graph, eac h p ai r of triangles sharing an edge induce a d ia mond. One dia- mond’s non-edge is sho wn dashed. Figure 2: Constructing the wheel graph drawing in the case of a large red arc. u i t i 0 v i 0 t i 1 v i 1 (a) An initial circle with blue (solid) and red (dashed) arcs has a very la rge red ar c, of measure at least 270 ◦ . t i 0 v i 0 t i 1 v i 1 v i t i v i t i (b) After sub dividing the very large red arc into five , coloring its second and fourth parts blue, and adding dummy v i and t i vertices . t i 0 v i 0 t i 1 v i 1 v i t i v i t i (c) In the resulting wheel graph, eac h p ai r of triangles sharing an edge induce a d ia mond. One dia- mond’s n on-edge is sho wn dashed. Figure 3: Constructing the wheel graph drawing in the case of a ve ry large red arc. edge gadget and eac h v ertex of G (cycle C i of G 3 ) w ith a v ertex gadget . The ed ge gadge t, consisting of four triangles f orm ing three diamond s, is sh o wn in Fig. 1(b) . (Note that eac h pair v ij v j i defines a n on-edge .) The v ertex gadget is a mo dified wheel graph w hose triangles corresp ond to the vertice s of cycles C i in G 3 (see Fig. 2 ). On ev ery circle ˜ C i , for ev ery edge u i u j in G , w e color blu e the arc of measure α cent ered about th e intersectio n of circle ˜ C i with u i u j (a n on -edge in ˜ G ). W e place t ij and v ij at the end points of this arc so that t ij u i v ij is a countercloc kw ise trip le. By the c h oi ce of α , all b lue arcs are we ll-separated, and hence the rectangles are we ll-separated f r om one another and from other disks, b y th e c hoice of r . W e color the remaining arcs red to obtain a red-blu e strip ed p att ern on eac h circle ˜ C i , co r resp onding in color to the vertic es of the corresp onding C i in G 3 . On ev ery circle ˜ C i , w e will add the r emaining ed ge s b etw een consecutive ve rtices of ˜ C i to complete the un ion of the triangles t ij u i v ij , forming a w h eel graph on hub u i , suc h that ev ery pair 4 of triangles s haring a sp ok e form a d iamond . If a red arc has measure at least 180 ◦ − α , ho w ever, w e must add additional sp ok es. By the general p osition assumption, at most one r ed arc p er wheel can hav e such great measure. If su c h a r ed arc h as measure less than 270 ◦ , w e divide it ev enly into thr e e parts and color the m id dle p art blue (see Fig. 2); otherwise, we d ivide it ev en ly into five parts and color the second and fourth parts blue (see Fig. 3), main taining the strip ed pattern in b oth cases. W e place dumm y t i and v i v ertices 1 at the newly created ( zer o , two or four ) arc endp oin ts. Finally , w e add the requisite edges to complete the wh ee l graph. W e place a vertex ˜ z i on an arbitrary red arc of ˜ C i and conn ec t it in ˜ G to the end v ertices (sa y t ij and v ik ) of that arc. Thus an empty triangle t ij z i v ik is formed in ˜ G as part of a diamond with u i , co r resp onding to z i and its inciden t edge in G 3 . In the unb ounded face of ˜ G w e place tw o isolated vertices indu cing a non-edge insid e the unboun ded face, th u s requir ing this face to b e chosen in any solution. Every n on -triangular f ac e of ˜ G must b e selected as an obs tacle, since every simple p olygon with at least 4 vertices has an in ternal diagonal (i.e., a non-edge). The selection of these faces are forced mo ves and corresp ond to the selection, in a vertex co ve r for G 3 , of the cen tr al ve rtex of eac h P 3 . This completes the construction of ˜ G . Since eac h pair of neigh b oring triangles in ˜ G ind ee d form a d iamo nd and ev ery non-triangular face is indeed a forced mo ve, the result follo w s. R emark 2.2 . T o represent co ordinates exactly as describ ed would require a very p ermissiv e un it- cost RAM m odel of computation in whic h it is p ossible to r epresen t r ea l n um b ers and p erform arithmetic and trigonometric fun ct ions in unit time. T h e redu ct ion ab o ve can b e mo dified in s uc h a wa y that eac h ve rtex p osition of ˜ G is represen ted using O (log n ) bits. In an alternate pro of strategy , we can b egin with a sp ecial touching p olygons representa tion of G instead of a b old dr a wing. This strategy wo u ld inv olv e top olo gically “co llapsin g” eac h r ec tangle R ij to a sin gl e edge shared by the wheel graphs on hubs u i and u j , w h ic h is th e unique edge crossing segmen t u i u j . Ther e is a linear-time algorithm for computing a touching p olyg ons representati on where th e num b er of sides in a p olygon is at most six [5 ], this algorithm can b e mo dified to ensure that every side of a p olygon is an edge of ˜ G . Th e linear-time algorithm for compu ting a touc hing p olygons repr esen tation give n in [5] can easily b e m odified to ensu re that ev ery edge of G corresp onds to a d isti nct side b et wee n t wo p olygons, b ut using this metho d there is no guaran teed w ay to place hubs inside their corresp onding p olygons su c h that ev ery pair of adjacent p olygons ha ve hubs that defi ne non-edges that meet the shared p olygon side. Nonetheless, a p olynomial-time algorithm by Mohar [7] do es ens ure th is. 3 Reduction to v ertex co ve r Theorem 3.1. Weighte d ORPG is r e ducible to weighte d maximum de gr e e 3 planar vertex c over by an optimal solution value- p r eserving r e duction. Pr o o f. Giv en a plane graph G on n v ertices in general p osition, w e construct a graph ˆ G that adm its a vertex co ver of cost k if and only if G admits an obstacle represen tation of cost k . Ev ery b ounded non-triangular face of G m u st b e selected as an obstacle; moreo v er, the u n- b ounded face m ust b e chosen if and only if its conv ex hull b oundary con tains a non-edge. Sin ce 1 Dummy vertices h a ve n o adjacencies with any vertices outside of D i . 5 these are forced mo v es, w e henceforth assume without loss of generalit y that every n on-edge w e m u s t b loc k meets at least t w o faces. Recall that an empty triangle is a b oun ded face on th ree vertice s not con taining an y other v ertices, and that a diamond consists of tw o empty triangles that share an edge and ha ve their four v ertices in conv ex p ositio n. W e claim th at every non-edge m u st meet the t w o triangles forming some diamond, and h ence m u s t meet those triangles’ shared edge. Assume for contradicti on that some r emaining non-edge s nev er cr osses th e diagonal edge of a diamond. Denote by u and v the endp oint s of s , and orient the plane s u c h that u is directly b elo w v . Ob ta in a sequence of emp t y triangles ( f 0 , f 1 , . . . , f k ) b y tracing s from u (a v ertex on f 0 ) to v (a vertex on f k ). Denote b y v i (for 1 ≤ i ≤ k ) the u nique v ertex in face f k that is not a v ertex of f i − 1 (so that v k = v ). Without loss of generalit y , the reflex angle of f 0 and f 1 is to the right of s , w hic h implies that v 1 is to the r igh t of s . In order for f 2 to b e th e next face in this sequence, v 2 m u s t b e to the left of s . In general, in ord er for f i to b e the n ext face in this sequence, v i m u s t b e on the other side of s f rom v i − 1 . This p a ttern must con tinue indefi nitely , lest t wo consecutiv e triangles form a d iamond . The indefinite con tinuati on of this p attern implies an infinite sequence of face s defined b y s , and hence a con tradiction. W e no w define ˆ G , wh ic h is a subgrap h of the dual of G : eac h edge of ˆ G corresp ond s to diamond of G . The graph ˆ G is induced b y th ese edges (with ve rtex we ights set to th e corresp ond face w eights) . F or eac h diamond, at least one its t wo triangles must b e c h osen in any obstacle r epresen tation. Th us ev ery obstacle r ep resen tation of ˆ G corresp onds to a v ertex co ver of G of the same cost, and vice versa. R emark 3.2 . W e may wish to adopt the more realistic bit mo del, sin ce a plane graph drawing ma y ha ve b een expressed using a num b er of bits su p er-polynomial in n for vertex coord inates. In this mo del, the reduction would require time su per -p olynomial in | V ( G ) | b ut n onethele ss p olynomial in the n umber of input bits used for representing G . F rom Theorem 3.1 w e im m ediat ely obtain the follo wing. Corollary 3.3. W e ighte d O RPG admits a p olyn omial-time appr o ximation scheme (PT AS) [3]. Moreo v er, this also follo ws. Corollary 3.4. O RPG is fixe d p ar ameter tr actable (FPT). Pr o o f. P erform th e r eduction of Theorem 3.1, pro ducing a p lanar maxim um degree 3 vertex co ver instance ˆ G w ith V ( ˆ G ) = ˆ n Using the FPT algorithm by Xiao [10] for maxim u m degree 3 vertex co v er on ˆ G , we can compute an obstacle repr esen tation for G with k obstacles in add itio n al time at most 1 . 1616 k −| F 0 | ˆ n O (1) = 1 . 1616 k −| F 0 | n O (1) = 1 . 1616 k n O (1) . Alternativ ely , using the FPT algorithm by Alb er et al. [1] for planar verte x cov er on ˆ G , we can to compute an obstacle r epresen tation for G with k obstacles in additional time at most O (2 4 √ 3( k −| F 0 | ) ˆ n ) = O (2 4 √ 3( k −| F 0 | ) n ) = O (2 4 √ 3 k n ). References [1] J oc hen Alb er, Henning F ernau, and R olf Niedermeier. P arameterized complexity: Exp onen tial sp eed-up f or planar graph pr ob lems. In in Ele ctr onic Col lo quiu m on Computational Complexity (ECCC) , pages 261–27 2. S pringer, 2001. 6 [2] Hann ah Alp ert, Christina Ko c h, and J osh ua Laison. Obstacle num b ers of grap h s. Discr ete & Computatio nal Ge ometry , 44:2 23–244, July 2010. www.spr in ge r link.com/ con tent /45038g67 t22463g5. [3] Br en da S. Bak er. App ro ximation algorithms for np-complete problems on planar graphs. J. ACM , 41:153–18 0, J an uary 1994. [4] Hu b er t de F raysseix, J´ anos P ac h, and Richard P ollac k. Ho w to dr a w a planar graph on a grid. Combinatoric a , 10(1):41–51 , 1990. [5] C hristian A. Dun ca n, Emden R. Gansner, Yifan Hu, Mic hael Kaufmann, and S tephen G. Kob ouro v. Op timal p olygonal representat ion of planar graphs. CoRR , abs /1104.1482 , 2011. [6] Michael R. Garey and David S. Johnson. The rectilinear S tei ner tree p roblem is NP-complete. SIAM Journal of Applie d Mathematics , 32:82 6–834, 1977. [7] Bo jan Mohar. C ir cle pac k in gs of maps in p olynomial time. Eur op e an Journal of Combinatorics , 18(7): 785–8 05, 1997. [8] Deniz S arı¨ oz. App ro ximating the obstacle n u m b er for a graph dra w ing efficien tly . In Pr o c. 23r d Canadia n Confer enc e on Computationa l Ge ometry (CCCG ’11) , p ag es 29 7–302, 2011. [9] Marc J. v an Kr ev eld. Bold graph dra w ings. In Pr o c. 21st Canadian Confer enc e on Computa - tional Ge ometry (CCCG ’09) , pages 119–122 , 2010. [10] Mingyu Xiao. A note on v ertex cov er in graphs with maximum degree 3. In My Th ai and S arta j Sahni, editors, Computing and Combinatorics , v olume 6196 of L e ctur e N ot es in Computer Scienc e , pages 150– 159. S pringer Berlin / Heidelb erg, 2010. 7
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment