Interference minimization in physical model of wireless networks
Interference minimization problem in wireless sensor and ad-hoc networks is considered. That is to assign a transmission power to each node of a network such that the network is connected and at the same time the maximum of accumulated signal straigh…
Authors: Hakob Aslanyan
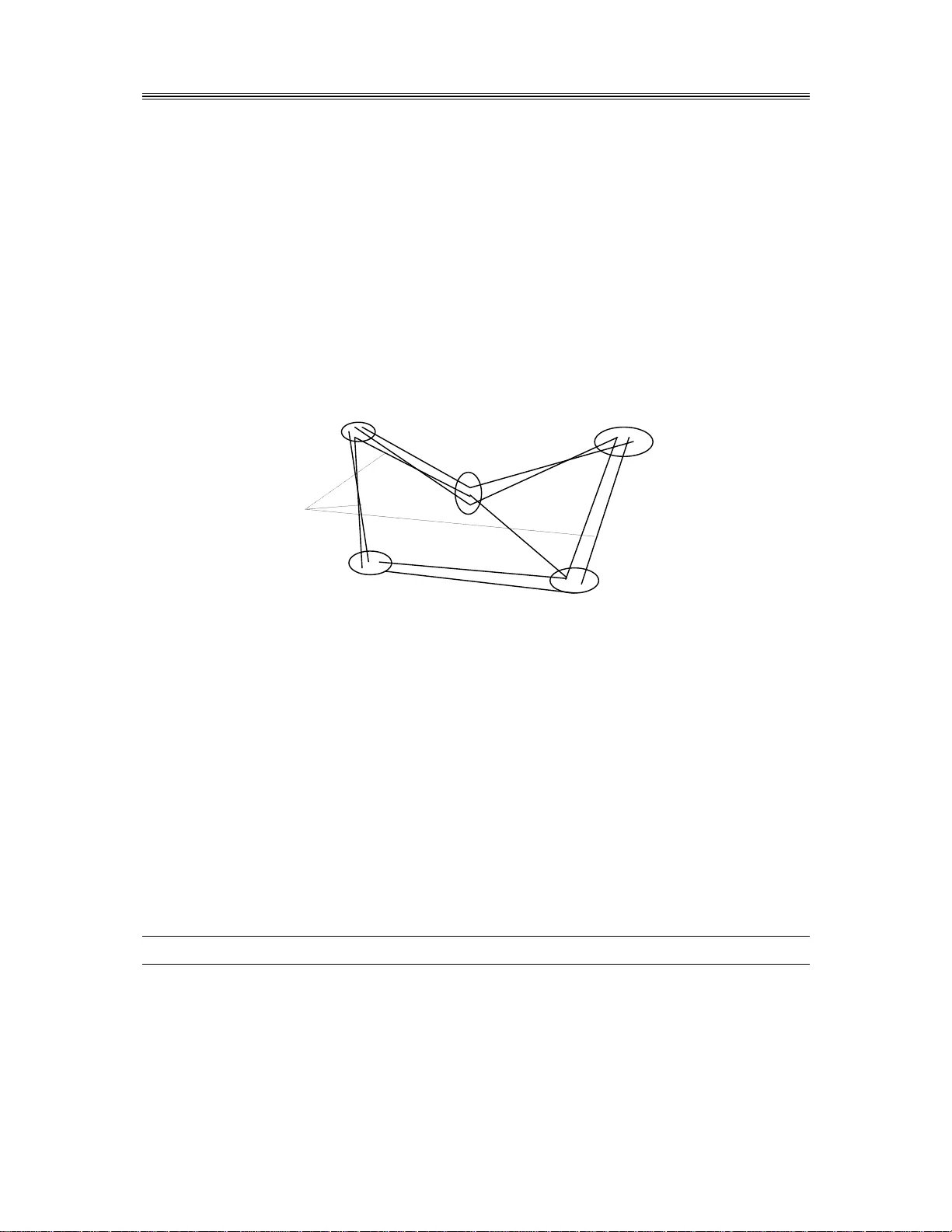
Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 221 INTERFERENCE MINIMIZA TION IN PHYS ICAL MODEL OF WIRELESS NETW ORKS Hakob Aslanyan Abstract : Interference minimization prob lem in wireless senso r and ad-hoc networks is considered. That is to assign a transmission power to each node of a network such that t he network is connected and at the same time the maxi mum of acc umulate d sign al straig ht on ne twork no des is minimum. Pr evious work s on in terferenc e minimiza tion in wirele ss networks mainly c onsider the disk graph mo del of n etwork. Fo r disk gr aph model two approxim ation algor ithms with ) ( n O and ) ) ln (( 2 n opt O upper boun ds of maxi mum interfe rence are known, where n is the number of nodes an d opt is the minimal interf erence of a give n network. In c urrent work we consider more g eneral interference model, the physical in terfe rence model, where sende r nodes' signal st raight on a given node is a function of a sender/receiver node pair and s ender nodes' transmission power. For this model we give a po lynomial time approxim ation algorithm whic h finds a connected ne twork with at most ) / ) ln (( 2 n opt O interference, where 1 is the minimum signa l straight necessary on receiver node for successfully rece iving a message. Keywords : in terferenc e, wireless networks , graph c onnecti vity, se t cover, randomized roundi ng. ACM Classification Keywords : C.2.1 Network Architectu re and Design - Net work topology, G.2. 2 Graph Theory - Network problems. Introduction We consider interfer ence min imization pr oble m in energy limit ed wirel ess networks (wireless sensor an d ad-hoc networks) where re charging or changing the energy sou rces of nodes is not feasible and sometimes due to environm ental condi tions no t possibl e. In suc h networks i t is impor tant to consi der the minimizati on of ener gy consumption of algorithms run ning on network nodes. By dec reasing energy consumption w e increase nodes operability time an d as a result netwo rks' lifetime. In different w ireless sensor network (WSN) applicat ions definition of networks' lifetim e may be different (till all th e nodes are alive, network is connected, given a rea is monitored b y alive nodes, etc). In curre nt work we tend to decrease energy consumption of nodes by decreasing the maximu m interfer ence of ne twork algori thmical ly. Wi reless communication of two nodes which is experiencing the third one is called interference . High interference on a receiver node (hig h value of accumulated signal straights on a node ) makes difficulty to determine and acce pt the signals dedicated to it, this makes necessity for sender node to retransmit the signal until it is successfully accepted by receive r node, which is extra energy consumption and shou ld be avoided. Interference Minimization in Disk Gr aph Model of Wireless Networks Consider a set of spatially distribu ted nodes, where each node equipp ed with radio transmitter/receiver an d the power of nodes' transmitte r is adjustable between zero and nodes ' maximum transmission level. In disk graph model of networ k assumed that by fixing a transmission power for a node w e define a transmission radius/disk of a node, i.e. the t ransmitted signa l is reachable and unif orm in any point of transmission disk of no de and is zero outside of it. In this model two nodes considere d connected if they are covered by each othe rs transmission disks and interf erence on a given node defined a s the number of transmission disks including that node. The overall interferen ce of network is th e maxim um in terferenc e among all the nodes forming the n etwork. The main weakness of disk gr aph model is the assumption that the radio coverage area is a pe rfect circle. Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 222 Assigning a transmission powe rs to a given set of spatially distributed nodes such that nodes form a connected network with as signed transmission powe rs while the interference of netwo rk is minimal called interference minimiza tion proble m in wir eless ne tworks. One particular case of in terference minimizatio n problem described abo ve is studied in [Rickenbach, 200 5]. Authors co nsidered the pro blem in one dimens ional n etwork, wher e all the nodes a re distribu ted alon g the straight lin e, and named it a highway-m odel. For this m ode l they showed that in tuitiv e algorithm, which con nects each node with it s closest left and right nodes, can give a bad performance. An example of network where intuitive algorithm ha s worst performance is th e exponential node chain, where distan ce between two cons ecutive nodes gr ows expo nentiall y ( 1 1 0 ,2 , ,2 2 n ). They also gave two algorithms for one dimen sional case of interference minimiz ation problem. The first algo rithm, for a given set of d istributed nodes, finds a c onnected network with at most ) ( O interferenc e w here is inter ference of unifor m radius ne twork under consi deration and is ) ( n O in some network instances. The second one is an approximation a lgorithm with ) ( 4 O approximatio n ratio. By applying computational geom etry and -net theory to ideas given in [Rickenb ach, 2005], [Halldorss on, 2006 ] proposes a algor ithm whic h gives ) ( O interference bound f or maximum interference in two and ) ( log O for any constant dimensional network. Authors of [As lanyan, 2010] give iterative algorithm based on linear program relaxat ion techniques which guara nties ) ) ln (( 2 n opt O interfer ence bound for networks of n nodes, opt here is the optimal inte rference value fo r given instance of netw ork. Logarithmic lower bo und for interference minimization problem in disk graph m odel of network s under the general distance function is proven in [Bilo, 2006] by reduc ing mini mum set cover to minimu m interf erence problem. Interference Minimization in Physical Model of Wireless Networ ks Again, consider a set of spatially di stributed w ireless nodes, where each no de has a radio transmitter/receiver with adjustable powe r level. In physical m odel of wire less n etworks we refuse the assumption that the signa l coverage of a nod e is a perfect circle a nd assume that t he signal straight on an y given point (node ) of network is a function of sender node, t he node in quest ion and the level of transmitted signal. In this model we are also given a c onstant w hich is a signal accept ance threshold, i.e. it assume d that receiver node a ccepts the signal if it's straight is at leas t . By this mean two nodes cons idered connected if thei r signals' straights are at least on each other. Interference on a given nod e defined as a sum of signal straight s on that node and interference of networks is the maximum interference among a ll the nodes forming the network. The disk graph model can be d educed from physical model if we consider a signal straight function which for every no de and its tra nsmissi on level d raws a di sk and out puts a pos itive con stant for every n ode wit hin that di sk and zero for the re st. Another example of signal straight functio n is ) , ( = ) , , ( v u d v u f where u and v are sender and rece iver nodes respectiv ely, is the transmission powe r of u , 2,6 is the path lo st exponent and ) , ( v u d is the distan ce between nodes u and v [Pahlavan, 1995]. Interference min imization problem defined in a same way a s for di sk graph model. Assign a transmission powers to a given set of spatially distributed wireless nodes such that nodes form a connected network with assign ed transmission powe rs and the interf erence of network is minimal. Our result is a determin istic polynomi al time al gorithm for inter ferenc e minimi zation pr oblem in wir eless n etworks under the physical model of wireless netwo rks in consideration , which for given netwo rk of n wireless nod es finds a connected netwo rk with at most ) / ) ln (( 2 n opt O interference. Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 223 Formal Definitions Consider a set V of n wireless nodes spatia lly distributed over a given area whe re nodes have adjustable transmission power and it can be fixed between zero and no des' maximum transmissio n power. For any nod e V u denote the rang e of feasible tran smission powers by ] [0, = max u u R , where max u is the maximum transmission power for node u , and def ine a signal st raight funct ion R R V u u : where ) , ( v u is the signal straight of node u on node v when u uses t he transmissio n power . We assu me that th e signal straight function satisfies to foll owing conditions 1. for any u R 2 1 , , from 2 1 it follows that ) , ( ) , ( 2 1 v v u u 2. fo r given R it is easy to find a u R (if exists) such that = ) , ( v u Suppose that fo r any node u the suitable transmis sion power u is fixed, then any two nodes u and v considered conne cted if ) , ( u u v and ) , ( v v u where 1 is the s ignal acce ptance thresh old of network. Inte rference on a given node u is the accumulated signal straight of all the nodes forming the network ) , ( = ) ( } { \ v v u V v u u I and ) ( max = ) ( V I V I V v is the overall network interf erence. At this point interference minimiza tion proble m can b e formula ted as f ollows: Given a spatially distributed set of wirele ss nodes, assign a suitable t ransmission power to eac h node such that the network is connected and the in terference of net work is minimal. This is the formu lation of interference minimiza tion problem by transmission powe r assignment. Consider a network graph ) , ( = E V G where } ) , ( , ) , ( , , | ) , {( = max v v max u u u v V v u v u E i.e. in graph G two vert exes/nodes are incid ent if their maximum transmission powers a re enough for communicating with each other. By this mean interferenc e minimization problem is formulated as follows. For a given netw ork graph ) , ( = E V G find a connected spanning subgraph ) , ( = E V H such that the interference of network computed by the selected set of edges is minimal. Formally, having the subg raph ) , ( = E V H it is corre ct to furt her extract tr ansmission power fo r any node u as a minimum power such t hat u can communicate with all of its neighbors in H , } ) , ( that all for ) , ( | { = E v u v v min u u , which av oids un necessary interf erence . Set Covering and Interf erence Minimization In the classical set cover problem a set S and a collection C of subs ets of S are given, it is required to find a minimum size sub collection C of C such that the union of sets of C is S . In a decis ion version o f set cover problem a positive integer k is given and the question is if it is possible to choose at most k subsets from collection C such that the union of chos en sets is S . It is well known tha t decision version of set co ver problem is NP-complete an d in polynomial time th e optimal solution can not be approximated closer than with a logarithmic factor [John son, 1974]. Several varia nts of set cover problem ha ve been studied [Kuhn, 2005; Garg, 2006; Demaine, 2006; Guo, 2006; Mecke, 2004; Ruf, 200 4; Aslanyan, 2003]. Being motivated by inte rference minimization prob lem in cellular networks the minim um membership set cover (MMSC) problem has be en investigated in [Kuhn, 2005]. In M MSC a set S and a collection C of subsets of S are given, it is required to find a subset C of C such th at the un ion of se ts in C is S and the maximum covered element of S is covere d by as few as possibl e subse ts from C . In a decision version of MMSC problem Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 224 a positive integer k is given and the question is if it is possible to choose a sub colle ction of C such that the union of c hosen s ets is S and each e lement of S is covered by at most k different subset s. [Kuhn, 2005] Contains the proofs of NP-completen ess of decision vers ion of MMSC proble m and non- approximab ility of MMSC optimization problem b y factor closer than ) ln ( n O unless ) ( ) loglog ( n O n TIME NP . Also, by using the linea r program relaxat ion and randomized rounding techniques, [Ku hn, 2005] gives a po lynomial time alg orithm, which approxi mates t he opti mal so lution o f MMSC with loga rith mic fa ctor ) ln ( n O . Minimum pa rtial membe rship partia l set cove r (MPMPSC ) problem has been proposed in [Aslanyan, 2010] and used for developing interfere nce mi nimization algorithm for wireless networks (d isk graph mo del under considerat ion). In MPMPSC a set 2 1 = S S S , consist ing of two di sjoin t sets 1 S and 2 S , along with collection C of subs ets o f S are given, it is required to f ind a sub collection C of C such that the union of sets in C contains all the ele ments of 1 S and the maximum cove red element of 2 S is covere d by as few as possi ble subsets from C . In a decision versio n of MPMPSC problem a positiv e integer k is given and the question is if it is possibl e to choose a sub col lection of C such that the un ion of chosen sets contains al l the elements of 1 S and each ele ment of 2 S is covered by at most k different subset s. It is known that t he decision version of MPMPSC problem is NP-Comp lete and that the determin istic polynomial time algorithm exists which approximate s the optimal solution of optimization version of MPMPSC by loga rithmic factor |})) | |, {| ( ( 2 1 S S max log O which asymptotically matches t he lower bound [Aslany an, 2010]. The ap proximation algorithm for MPMPSC is achie ved by applying the same techniques which has been applied in [Kuhn, 2005] fo r solving the MMSC. Being moti vated by interf erenc e minimi zation problem in phy sical model of wireless network s we cons ider a weighted minimum partia l membership partial set cover (WMPMPSC) problem which is a generalization of MPMPSC. In WMP MPSC a set 2 1 = S S S , consis ting of two di sjoint s ets 1 S and 2 S , along with collection C of subs ets of S are given. In ea ch subset from C the element s of 2 S have weights in [0,1] . The same element of 2 S may have a diffe rent weights in different sets of C . It is r equired to find a s ub collec tion C of C such that the union of sets in C contains all the elements of 1 S and th e accumulated, amo ng the subsets of C , weight of a node whic h has the maximum a ccumulated weight, is as small a s possible. In a decision version of WMPMPSC problem a positive n umber k is given and the question is if it is possible to choose a sub collection of C such that the un ion of chosen sets c ontains all the e lements of 1 S and the accumulated , among the chosen sets, weight of each node is at most k . It is easy to see that in WMPMPSC we get a instan ce of MPMPSC when each node has a weig ht 1 in all the set s of C . This last statement proves the NP-Com pleteness of the decisio n version of WMPMPSC and t he logarithmic lower bo und f or optimization version of the problem. LP Formulations Let C denote a subset of the collection C . To each sub set C C j we assign a variable {0,1} j x such that C C x j j 1 = . For C to be a set cover for S , it is required that for ea ch element S u at least one set j C with j C u is in C . Therefore, C is a set cover fo r S if and only if for all S u it holds that 1 j u j C x . Let Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 225 z is the maxi mum members hip over all the ele ments caus ed by the se ts in C . Then for all S u it follows that z x j u j C . Then the integer linear program MMSC IP of MMSC problem can be formu lated as: minimize z subject to , 1 j u j C x S u (1) , z x j u j C S u (2) , {0,1} j x C C j (3) Integer linear program MPMPSC IP of MPMPSC would be : minimize z subject to , 1 j u j C x 1 S u (4) , z x j u j C 2 S u (5) , {0,1} j x C C j (6) After introd ucing the weight fun ction [0,1] : 2 S C w , where ) , ( u C w j is the weight of u in subse t j C , the integer linear prog ram WMPMPSC IP of WMPMPSC can be formulated as: minimize z subject to , 1 j u j C x 1 S u (7) , ) , ( z u C w x j j u j C 2 S u (8) , {0,1} j x C C j (9) By appl ying r andomi zed roun ding techni que to MMSC IP with relaxati on of constra ints (3) , [Kuhn, 2005] gives a deterministic po lynomial time app roximation algorithm with 1) ) ( ln ))( (1/ (1 n z O approximation ratio for MMSC proble m, where z is the optimal solution fo r MMSC IP relaxa tion. Later on [Aslanyan, 2 010] states that by applying the same randomized roundin g technique to MPMPSC IP with rela xation of constraints (6) gives a determin istic po lynom ial tim e approx imati on algo rithm wi th 1) |}) | |, {| max ( ln ))( (1/ (1 2 1 S S z O approximatio n ratio for MPMPSC prob lem, where z is the optimal solution fo r MPMPSC IP relaxation. In current Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 226 work we state that the same randomized rounding technique can be applied to WMPMPSC IP with relaxation of constraints (9) to achieve a determinis tic polynomial time approximation a lgorithm with 1) |}) | |, {| max ( ln ))( (1/ (1 2 1 S S z O approximation ratio for WMPMPSC pr oblem , where z is the optimal solutio n for WMPMPSC IP relaxation. The proof of the last statement is presented in th e Appendix of this work. To sum up, we have the following theorem. Theore m 1. For WMPMPSC problem, there e xists a determi nistic polynomial-t ime approximation algorithm with an approxim ation ratio of |})) | |, {| ( ( 2 1 S S max log O 1 Approximation Algor ithm for Interference Minim i zation in Physical Model of Wireless Networks Algorithm takes a net work graph ) , ( = E V G with n vertices as an input and after loga rithmic number of ) log ( n O k iterati ons retur ns conn ected sub graph G G k where int erference o f network corresponding to the graph k G is bounded by ) / ) ln (( 2 n opt O , where V n = is the number o f network nodes and opt is the interference of minimum interferen ce connected network. Algorithm st arts the wor k with th e graph ) , ( = 0 0 E V G where = 0 E . On the th l iteratio n, 1 l , algo rithm chooses a subset 1 \ l l E E F of new edge s and adds them to already chosen edge set i l i l F E 1 1 = 1 = . As a consequence of such enlargement of edge set, interf erence on graph vertices may in crease in some value depending on l F . Algorithm finishes the work if the graph ) , ( = l l E V G is conn ected otherwise g oes for the next iteration. Below we present how algo rithm chooses the set of edges 1 \ l l E E F on the th l iterati on. Algorith ms' quality, i.e the final max imal interference on nodes (it s upper estimate) is bounded by the accumula ted through the iterations interferences wh ic h we try to keep minimal. Let ) , ( = 1 1 l l E V G is the graph obtained after the th l 1) ( iteration, and has the set of connected component s } , , { = ) ( 1 1 1 1 1 l k l l l C C G C . Denote by 1 1 \ l l E E H the set of all edges which have their endpoints in dif ferent connected component s of 1 l G . On the th l stage of algorithm a subset of 1 l H is selected to further redu ce the number of connecte d components which finally brings us to a connected s ubgraph. In this way we buil d the collec tion ) ), ( ( 1 1 l l H G C T of spec ial sets as follows. Star ting wit h 1 l H we add to the set ) ), ( ( 1 1 l l H G C T of th l stage specific weighted subsets V C C v u T v l u l l } , { = ) , ( 1 1 defined by all 1 ) , ( l H v u , where u belongs to connected c omponent u l C 1 and v belongs to v l C 1 . By selection of u and v we have that u l C 1 and v l C 1 are different. By definition of connectivity nodes u and v can communicate with each othe r if their signal tran smission powers uv and vu sati sfy to ) , ( uv u v an d ) , ( vu v u , wher e is the signal acceptance threshold. To a void unnecessary energy consumption and to reduce interference it would be right to adjust transmission powers uv and vu such that = ) , ( uv u v and = ) , ( vu v u , this is possible to do because of the second pro perty of the signal straight function . Then the noise of the link ) , ( v u on any no de t can be calculated as 1 See the Appendix A for the proof. Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 227 ) , ( ) , ( = ) ), , (( vu v uv u t t t v u w which would be the weight ) ), , ( ( t v u T w l of node t in the subset ) , ( v u T l . And so ) , ( v u T l is a composite set which includes two labels for compon ents u l C 1 and v l C 1 and all the vertices in V along wit h the weights, which a re the interference increase on n odes if the edge ) , ( v u is selec ted as a communic ation link . In term s of WMPMPS C the la be ls of connected components will comp ose the set 1 S and weighted V will be the set 2 S . Figure 1 demonstrates connected comp onents that are inpu t to the stage l , and the set 1 l H of all cross component edges. Figure 1: Connec ted comp onents that are input to the l -th stage of the algorithm After constructing ) ), ( ( 1 1 l l H G C T we no rmalize the weights of elements by dividing all the weig hts by the maximum weight ) ), , (( max = 1 ) , ( , t v u w w l H v u t max and solve the WMPMPSC on the set V G C l ) ( 1 and collection of subset s ) ), ( ( 1 1 l l H G C T , where condition for elemen ts of ) ( 1 l G C is to be covered and for elements of V is to have minimum accumulated weight . Finally , based on t he solution ) ), ( ( ) ), ( ( 1 1 1 1 l l l l H G C T H G C W of WMPMPSC we build the set l F of network graph edge s, selected at the th l iteratio n of algorith m by adding to l F all the edges 1 ) , ( l H v u such that ) ), ( ( ) , ( 1 1 l l l H G C W v u T and multiply all the weights by max w to r eceive the real interf erence i ncrease . Algorithm performance Theore m 2 . On each iteration of algorithm the number of connected components is being reduced at least by factor of two, which bounds the total num ber of iterations by ) log ( n O . Proof. For each conn ected component ) ( 1 1 l u l G C C of graph 1 l G the solution ) ), ( ( 1 1 l l H G C W of WMPMPSC solved at th l iteration c ontains at le ast one set ) ), ( ( ) , ( 1 1 l l l H G C W v u T such tha t ) , ( 1 v u T C l u l p l C 1 q l C 1 1 1 l C 1 1 l k l C 2 1 l C 1 l H Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 228 (as ) ), ( ( 1 1 l l H G C W is a cover for the set ) ( 1 l G C ). And as each set ) ), ( ( ) , ( 1 1 l l l H G C W v u T contains exactly two conn ected components, then b y adding the edge ) , ( v u to our s olution, we merge t hose two connected component s into one (connecting by the e dge ) , ( v u ). So every connecte d component merges with at least one othe r component, which reduc es the number o f connected compo nents at least by fa ctor of 2 . Lemma 1. Net work corresponding to th e graph ) , ( = l l F V G , where l F is the edge set obtained on the th l iteration of algo rithm, has interference in ) )/ ln (( 2 n opt O . Proof. Consider the set of connected components } , , { = ) ( 1 1 1 1 1 l k l l l C C G C of th l it erative step of algorithm . Let opt E is the set of the edges of some interference optim al connected network for ou r problem (edges of connected networ k with optimal inte rference opt ). Then there is a s ubset opt l opt E E which spans connected components ) ( 1 l G C and the netw ork of the gr aph ) , ( = l opt l opt E V G has interference not exceeding the opt . Fact 1. The maximal vert ex interference due to the spanner l opt E of ) ( 1 l G C is at most opt . Now let us build the set collection } ) , )/( , ( { = ) ), ( ( 1 l opt l l opt l opt E v u v u T E G C T . Fact 2. ) ), ( ( 1 l opt l opt E G C T is a sub collection of ) ), ( ( 1 1 l l H G C T built on the th l iteration of algorithm and is a cover for ) ( 1 l G C , i.e. ) ), ( ( 1 l opt l opt E G C T is a solution for the WMPMPSC problem, with some value * z , solved on the th l iteration of alg orithm, not necessary optimal. Now consider th e matrix w opt P representing the transmiss ion signal s on some node w caused by communication links of l opt E . w n u n u w j u n u w u n u w u n u w n u i u w j u i u w u i u w u i u w n u u w j u u w u u w u u w n u u w j u u w u u w u u w opt P P P P P P P P P P P P P P P P P 2 1 2 1 2 2 2 2 1 2 1 1 2 1 1 1 = where otherwise ), , ( ) , ( or if , 0 j i i u u u l opt j i w j u i u w E u u j i P is the signal straight of node i u on node w when i u uses the transmission power j u i u (comm unica tes with node j u ). Fact 3. and the sum of the matrix elements will give the interfere nce increase we count (th e real interference increase is the sum of the maximal element s from each row) on node w by edge s et l opt E . Due to the Fact 1 and signal acceptance thre shold for any vertex i u the number of sets ) , ), ( ( ) , ( 1 w E G C T v u T l opt l opt i l will not Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 229 exceed the / opt , in other words the nu mber of no n zero el ements on each row of matr ix w opt P is bounded by / opt . Fact 4. The interference increase on node w by the edge set l opt E can be calculated as w j u i u j n i P max 1 = and due to the Fact 1 it doesn't exceed the opt . From facts 3 and 4 it follows that the sum of the matrix elem ents is bounded by / 2 opt , whic h means that the optimal value of WMPMPSC prob lem solved on the th l ite ration of algorithm is bounded by / 2 opt and therefor by Th eorem 1 the interf erence increa se by the edge set l F is bounded by ) / ln ( 2 n opt O . Theorem 3. The netwo rk built by WMPMPSC relaxation a lgorithm has at most ) )/ ln (( 2 2 n opt O interference. Proof. The proof is in combination of Theorem 2 and Lemma 1 . Conclusion and Future Work In current work we consi dered the interfer ence mini mizati on problem in physic al model of wireless ne tworks an d proposed a po lynomial time app roximation algo rithm which for a given set of wireless nodes creates a connected network wi th at most ) / ) ln (( 2 n opt O interfere nce. In so me WSN a pplicati ons networ k consi dered as function al while it is connected, the refore in future works on interference min imization the k -connectivity of network should be considered. Also considering the problem in Euclidean spaces, which is a realistic case fo r WSNs, may g ive a better appr oximati on ratio. References [Shannon, 194 9] C.E.Shannon. The Math ematical theory of comm unication. In: Th e Mathematical Theo ry of Communication. Ed. C.E.Shanno n and W.Weav er. University of I llinois Press, Urbana, 1949. [Aslan yan, 2003] H. Aslan yan. Gree dy Set Co ver Estima tions . Computer Science an d Information Tec hnologies (CSIT), :143--144, 200 3. [Aslanyan, 2010] H. Aslanyan and J. Rolim. Interference Minimizat ion in Wireless Networks. IEEE/IFIP Internation al Conference on Embedde d and Ubiquitous Comput ing (EUC 2010), :444--449, 2 010. [Bilo, 2006] D. B ilo and G. Proietti. On the complexity of minimizing interference in ad-hoc and sensor networks. 2nd International W orkshop on Algorit hmi c Aspects of Wireless Senso r Networks, ALGOSENSORS, LNCS, 4240:13--2 4, 2006. [Demaine, 2006 ] E.D. Demaine and U. Feige an d M.T. Hajiaghayi and M. R. Salav atipour. Combinatio n can be hard: Approximabil ity of the un ique coverag e problem. Proc eedings of th e Seventeent h Annual ACM-SIA M Symposium on Discrete Algorithms (SO DA), :162--171, 2 006. [Garg, 1997] N. G arg and V.V. Vazirani an d M. Yannakakis. Primal-d ual approximati on algorithms for integr al flow and multicut in trees. Algor ithmica 18:3-2 0, 1997. [Guo, 2006] J. Gu o and R. Niederm eier. Exact algo rithms and applicat ions for Tree- like Weighted Set C over. Discrete Algorithms, 4(4):608--6 22, 2006. [Halldorsson, 2006] M. M. Halldorsson and T. Tokuyama. Minim izing Interference of a Wireless Ad-Hoc Netw ork in a Plane. Algorithmic Aspects of Wireless Sensor Network s, ALGOSENSORS, 4240/ 2006:71--82, 200 6. Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 230 [Johnson, 1974] D. Johns on. Approximation algorithms for co mbi natorial problems. Jour nal of Computer and System Sciences, 9:256-- 278, 1974. [Kuhn, 2005] F. Kuhn and P. vo n Rickenbach and R. W attenhofer and E. Welzl and A. Zollinger. Int erference in cell ular networks: the m inimum membership set cover proble. 11th Intern ational Computin g and Combinator ics Conference, COCOON, LNCS, 3595: 188--198, 2005. [Mecke, 2004] S. Meck e and D. Wagner. Solvin g Geometric Covering Problems by Data Reduction. 1 2th ESA, LNCS, 3221:760--7 71, 2004. [Pahlavan, 1995] K. Pahlavan and A. H. Levesque. Wireless information network s. Wiley-Interscienc e, 1995. [Rickenbach, 2005] P. v on Rickenbach and S. Schmid an d R. Wattenhofer and A. Zollinger. A rob ust interference model for wireless ad-hoc networks. 5th In ternational Worksho p on Algorithms for Wireless, Mobile, Ad Hoc and S ensor Networks (WMAN), 2005 . [Ruf, 2004] N. Ruf a nd A. Schobel. Set cover ing with almost con secutive ones property. Discret e Optimization, 1( 2):215-- 228, 2004. Appendix A Here we show h ow randomized round ing technique used in [Kuhn, 2005] fo r solving the MMSC IP can be used for solving WMPMPSC IP . This section m ostly presents the work of [Kuhn, 200 5]. Consider a instance ) , , = ( 2 1 w C S S S of WMPMPSC IP an d the solution vector x and z of WMPMPSC LP relaxation of WMPMPSC IP . Consider the fo llowing randomized rou nding scheme, where an integer solution m x 0,1 is computed by setting otherwise , 0 } , 1 min{ : y probabilit with , 1 i i i x p x independently for each } {1,..., n i . Let i A be th e “bad” event that the th i element is not covered. Lemma A1. The probab ility that the th i element remains unco vered is e p A P j i u j C i < ) (1 = ) ( Proof. The proof is in Lemma 1 of [Kuhn, 2005]. Let i B be the “bad” event that the weight of the th i element is more than z for some 1 . Lemma A2. The probab ility that the weight of the th i element is more than z is z j i j w i u j C z i e p B P 1 ) , ( ) 1) ( (1 1 < ) ( Proof. We us e a Chernoff- type a rgument. For 0 > ln = t , we hav e z t i j w j x i u j C t j i u j C i e e P z i j w x P B P > = > ) , ( = ) ( ) , ( Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 231 j i j w t j i u j C z t z t i j w j x t p e p e e e E i u j C 1 1 = < ) , ( ) , ( 1) ) , ( ( ) , ( 1 1) ( 1 1 = i j w j p i s j C z j i j w i s j C z e p z i j w j p z i j w j p i s j C z e e e i u j C 1) ( ) , ( 1) ( ) , ( 1) ( 1 = 1 The inequality and equalit y in the second line results by application of the M arkov inequality and because of the independence of the j x . The equalit y and inequality in the third line hold beca use ln = t and x e x 1 . For the inequalitie s in the last line we apply x x 1) ( 1 for 1 , 0,1 x and z i j w p j i u j C ) , ( . Denote the probability upper bounds g iven by Lemmas 1 A and 2 A by i A and i B : ). 1) ( (1 1 := and ) (1 := ) , ( j i j w i u j C z i j i s j C i p B p A In order to bound the p robability for any “bad” event to occur, we define a function P as fo llows ). (1 ) (1 2 := ) ,..., ( 1 = 1 = 1 i n i i n i m B A p p P Lemma A3. The p robability that any element is not covered o r has a weight more than z is upper-bounded by ) , , ( 1 m p p P : ). , , ( < 1 1 = 1 = m i n i i n i p p P B A P Proof. The proof is in Lemma 3 of [Kuhn, 2005]. The following shows that if and are chose n appro priately , ) , , ( 1 m p p P is a lways less than 1 . Lemma A4. When setting 1 |}) | |, {| max ( ln = 2 1 S S , then for } ,3/ 3/ { max 1 = ' ' z z , we have 4/5 < ) , , ( 1 m p p P . Proof. The proof is in Lemma 4 of [Kuhn, 2005]. Lemmas A 1 A4 lead to the following randomized algorithm fo r the WMPMPSC problem. As a first step, the linear program WMPMPSC LP has to be solved. Then, all i x are rounded to intege r values {0,1} i x using the described rando mized roun ding sc heme with 1 |}) | |, {| max ( ln = 2 1 S S . The rounding is repeat ed until the solution is fe asible (all elements are covered) and the we ight of the integ er solution deviates f rom the fractional Interna tional J ournal “I nforma tion Theo ries a nd Applic ations”, Vol. 17, Number 3 , 2010 232 weight ' z by at most a factor for } ,3/ 3/ { max 1 = ' ' z z . Each ti me, the probab ility to be succ essful is at least 1/5 and therefore, the p robability of not being successful de creases expone ntially in the number of trials. We will now sho w that ) , , ( 1 m p p P is a pessimist ic estimator and that therefo re, the algorithm described abo ve can be derandom ized. That is, P is an upper bound on the probability of o btaining a “bad” solution, 1 < P ( P is a probabilistic proof that a “good” solutio n exists), and the i p can be set to 0 or 1 without increasing P . The first two properties follow by Lemmas A3 and A4, the third property is shown by the following lemma. Lemma A5. For all i , either setting i p to 0 or settin g i p to 1 does not increase P : ) , ,1, , ( ), , ,0, , ( min ) , , ( 1 1 1 1 1 i i i i m p p P p p P p p P Proof. The proof is in Lemma 5 of [Kuhn, 2005]. Lemmas A3, A4 and A5 lead to an efficient determin istic approximat ion algorithm for the WM PMPSC problem. First, the linear program WMPMPSC LP has to be solved. The probabilities i p are determined as described above. For and as in Lemma A4, 4/5 < ) , , ( 1 m p p P . The prob abilities i p are now s et to 0 or 1 such t hat ) , , ( 1 m p p P remains smaller than 4/5 . This is possible by Lemma A5. When all {0,1} i p , we have an integer solution for WMPMPSC IP . The probab ility that not all element s are co vered or that the weight is lar ger than z is smaller than 4/5 < P . B ecause al l i p are 0 or 1 , this probability must be 0 . Hence, the computed WMPMPSC IP -solution is an -approximation for WMP MPSC. Authors’ Information Hakob Aslanyan – PhD student and research assistant; Compu ter Science Department, Universit y of Geneva, Battelle Batiment A, route de Drize 7, 1227 Gene va, Switzerland; e-mail: hakob.aslanyan@u nige.ch Major Fields of Scientific Re search: combinator ia l optimizat ion, graph theo ry, approximation and exact algo rithms, hardne ss of approximat ion, network d esign and co nnectivity
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment