Analysis of Equilibria and Strategic Interaction in Complex Networks
This paper studies $n$-person simultaneous-move games with linear best response function, where individuals interact within a given network structure. This class of games have been used to model various settings, such as, public goods, belief formati…
Authors: Victor M. Preciado, Jaelynn Oh, Ali Jadbabaie
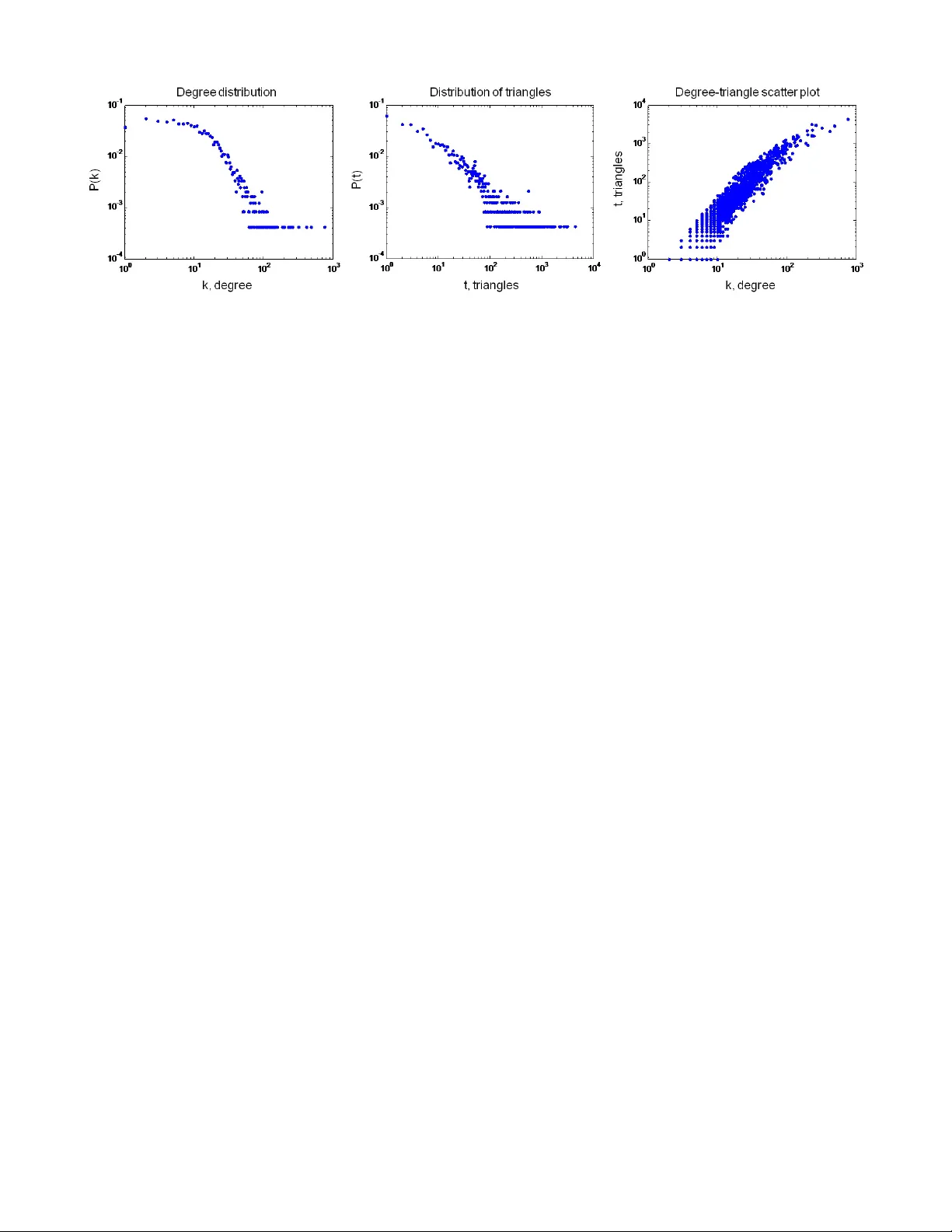
Analysis of Equilibria and Strategic Interaction in Complex Networks V ictor M. Preciado, Jaelynn Oh and Ali Jadbabaie Abstract — This paper studies n -person simultaneous-move games with linear best response function, where individuals interact within a given netw ork structure. This class of games hav e been used to model various settings, such as, public goods, belief f ormation, peer effects, and oligopoly . The purpose of this paper is to study the effect of the network structure on Nash equilibrium outcomes of this class of games. Bramoull ´ e et al. derived conditions f or uniqueness and stability of a Nash equilibrium in terms of the smallest eigen value of the adjacency matrix repr esenting the network of interactions. Motivated by this result, we study how local structural properties of the network of interactions affect this eigen value, influencing game equilibria. In particular , we use algebraic graph theory and con vex optimization to derive new bounds on the smallest eigen value in terms of the distribution of degrees, cycles, and other rele vant substructures. W e illustrate our results with numerical simulations in volving online social networks. I . I N T R O D U C T I O N In most social and economic settings, indi viduals do not interact uniformly with the rest of a society . Instead, they influence each other according to a structured network of interactions. This network can represent friendships in a social network, transactions among firms in a market, or communication links in a process of belief formation. In this context, an interesting question is to study how the network structure af fects the outcome of the interactions of the agents. W ith this purpose, one can model strategic interactions in a networked society as a multi-player simultaneous-move game. In particular , we focus our attention on the broad class of games with linear best response function [1]. This class of games have been used to model v arious settings such as belief formation [2], peer ef fects [3], and public goods [4]. In order to analyze the influence of the network struc- ture on the game outcome, we use two recent results by Bramoull ´ e et al. [5] and Ballester et al. [6] relating the Nash equilibria of the game with the largest and smallest eigen- values of the adjacency matrix of interactions. For example, in [5], the authors sho w that uniqueness and stability of a Nash equilibrium in games with linear best responses can be determined by the smallest eigenv alue of the network. In [5], it w as also illustrated how the smallest eigen v alue of the adjacency matrix determines the capacity of the network to absorb perturbations on the actions of the agents. Motiv ated by the results of Bramoull ´ e et al. [5], we study how local structural properties of the network affect the This work is supported by ONR MURI N000140810747. V .M. Preciado and A. Jadbabaie are with the GRASP Laboratory , School of Engineering and Applied Science, University of Pennsylv ania, Philadel- phia, P A 19104, USA { preciado,jadbabai } @seas.upenn.edu . J. Oh is with the Department of Operations and Information Management, Wharton School, University of Pennsylvania, Philadelphia, P A 19104, USA jaelynn@wharton.upenn.edu smallest eigen value of the adjacency matrix of interactions, affecting game equilibria. Therefore, our results b uild a bridge between structural properties of a network of interac- tions and the outcome of games with linear best responses. In particular, we use algebraic graph theory and con ve x optimization to derive bounds on the smallest eigen value of the adjacency matrix in terms of the distribution of degrees, cycles, and other important substructures. As we illustrate with numerical simulations in online social networks, these bounds can be used to estimate the effect of structural perturbations on the smallest eigen v alue. The paper is organized as follows. In the next subsec- tion, we revie w graph-theoretical terminology needed in our deriv ations. In Section II, we re vie w the relationship between the equilibria of games with linear best responses in a network and the smallest eigen value of the adjacency matrix of interactions. In Section III, we use algebraic graph theory to derive closed-form expressions for the so-called spectral moments of a network in terms of local structural features. In Section IV, we use con v ex optimization to deri ve optimal bounds on the smallest (and largest) eigenv alue of the interaction network from these moments. Our bounds help us to understand how structural properties of a network impact the stability properties of the Nash equilibria in the game. W e illustrate our results with numerical simulations in real online social networks in Section V. A. Notation Let G = ( V , E ) denote an undirected graph with n nodes, e edges, and no self-loops 1 . W e denote by V ( G ) = { v 1 , . . . , v n } the set of nodes and by E ( G ) ⊆ V ( G ) × V ( G ) the set of undirected edges of G . If { v i , v j } ∈ E ( G ) we call nodes v i and v j adjacent (or neighbors), which we denote by v i ∼ v j and define the set of neighbors of v i as N i = { w ∈ V ( G ) : { v i , w } ∈ E ( G ) } . The number of neighbors of v i is called the degr ee of the node, denoted by d i . W e define a walk of length k from v 0 to v k to be an ordered sequence of nodes ( v 0 , v 1 , ..., v k ) such that v i ∼ v i +1 for i = 0 , 1 , ..., k − 1 . If v 0 = v k , then the w alk is closed. A closed walk with no repeated nodes (with the exception of the first and last nodes) is called a cycle . For example, triangles , quadrangles and pentagons are cycles of length three, four, and fiv e, respectiv ely . Graphs can be algebraically represented via matrices. The adjacency matrix of an undirected graph G , denoted by A G = [ a ij ] , is an n × n symmetric matrix defined entry- wise as a ij = 1 if nodes v i and v j are adjacent, and 1 An undirected graph with no self-loops is also called a simple graph. a ij = 0 otherwise 2 . The eigenv alues of A G , denoted by λ 1 ≥ λ 2 ≥ . . . ≥ λ n , play a key role in our paper . The spectral radius of A G , denoted by ρ ( A G ) , is the maximum among the magnitudes of its eigen values. Since A G is a symmetric matrix with nonnegati ve entries, all its eigen values are real and the spectral radius is equal to the largest eigen value, λ 1 . W e define the k -th spectral moment of the adjacency matrix A G as: m k ( A G ) = 1 n n X i =1 λ k i . (1) As we shall show in Section III, there is a direct connection between the spectral moments and the presence of certain substructures in the graph, such as cycles of length k . I I . S T R AT E GI C I N T E R A C T I O N S I N N E T W O R K S In this section we present the game-theoretical model of strategic interactions considered in this paper and present interesting connections between the Nash equilibria and the eigen v alues of the adjacenc y matrix of the network. A. The Model W e represent the network of influences using a simple graph G . Let N = { 1 , · · · , n } denote the set of n players located at each node of the graph G . W e denote by x i ∈ [0 , ∞ ) the action chosen by agent i , and by x the v ector that represents the joint actions for all agents. W e denote by x − i the vector of actions of all players excluding player i . As mentioned before, players interact according to a network of influences that we describe using its adjacency matrix A G . The interactions are assumed to be symmetric, a ij = a j i , and we do not allow self-loops, a ii = 0 . The payof f function for agent i is gi ven by: U i ( x i , x − i ; δ, A G ) where δ ∈ R is a parameter that can be tuned to change the influence of neighboring nodes on each player’ s action. B. Games with Linear Best Response Functions W e study a class of games whose best response functions take a linear form. One well known example of this class of games is the differentiated-product Cournot oligopoly with linear in v erse demand and constant marginal cost with payof f function defined as [5]: U i ( x i , x − i ; δ, A G ) = x i a − b ( x i + 2 δ n X j =1 a ij x j ) − dx i , (2) where d is the constant marginal cost, and x i represents the amount produced by agent i in the oligopoly . Here, the in v erse demand for agent i is given by P i ( x i , x − i ; δ, A G ) = a − b ( x i + 2 δ P n j =1 a ij x j ) . One can prove that the best response function for this type of games yield the form [5]: f i ( x , δ, A G ) = max(0 , ¯ x i − δ n X j =1 a ij x j ) , (3) 2 For simple graphs, a ii = 0 for all i . where ¯ x i is the action that agent i would take in isolation, i.e., ¯ x i ∈ arg max x i U i ( x i , x − i ; δ, A G ) with a ij = 0 , for all j . W ithout loss of generality , one can normalize ¯ x i ≡ 1 for all i , so that f i ( x ) ∈ [0 , 1] . Then, a Nash equilibrium for this game is a v ector x ∈ [0 , 1] n that satisfies x i = f i ( x , δ, A G ) , for all agents i ∈ N , simultaneously . In what follo ws, we briefly describe a strategy to compute the complete set of Nash equilibria for δ ∈ [0 , 1] . C. Complete Set of Nash Equilibria Using the best response function in (3), one can determine the entire set of equilibria by simultaneously solving for the best response of each player . In [5], an algorithm that finds the full set of Nash equilibria in e xponential time is proposed. For a vector x , let S denote the set of activ e agents, i.e., S = { i : x i > 0 } . Let x S denote the vector of actions of the agents in S . The set of acti ve players induce a subgraph G S ⊆ G , with node-set S ⊆ V ( G ) and a set of edges E S ⊆ E ( G ) connecting activ e agents. W e denote by G N \ S,S the subgraph of G whose edges connect acti ve agents in S to inactiv e agents in N \ S . The adjacency matrices of G S and G N \ S,S are denoted by A S ∈ R | S |×| S | and A N \ S,S ∈ R n −| S |×| S | , respectiv ely . Then, one can sho w the following [5]: Pr oposition 1: A profile x with activ e agents S is a Nash equilibrium if and only if: ( I | S | + δ A S ) x S = 1 | S | , and δ A N \ S,S x S ≥ 1 n −| S | , where I p is the p × p identity matrix and 1 q is the q - dimensional vector of ones. Thus, in order to determine the complete set of all Nash equilibria, one can check the conditions in Proposition 1 for each one of the 2 n possibilities of S . For each possible S , these conditions can be checked by computing x S = ( I | S | + δ A S ) − 1 1 | S | , 1 and checking whether δ A N \ S,S x S ≥ 1 n −| S | . If the last inequality holds, then x S is an equilibrium outcome. Note that using this approach to compute the set of equilibria runs in exponential time. Howe ver , we can analyze some properties of the Nash equilibria, such as uniqueness and stability , by looking into the eigen values of the adjacenc y matrix. D. The Shape of Nash Equilibria In order to relate the equilibrium outcomes of the game to the network structure, the authors in [5] defined the follo wing potential function: ϕ ( x ; δ, A G ) , n X i =1 x i − 1 2 x 2 i − 1 2 δ n X i =1 n X j =1 a ij x i x j . Then, they proved, using Kuhn-T ucker conditions, that the set of Nash equilibria coincides with the critical points of 1 The matrix I | S | + δ A S is invertible for almost any δ ∈ R , excepting the measure zero set {− 1 /µ i , i = 1 , ..., | S |} , where µ 1 , ..., µ | S | are the eigen values of A S . the following optimization problem: ( P ) max x ϕ ( x ; δ, A G ) s.t. x i ≥ 0 , for all i, for a given network structure A G and a parameter δ . E. Eigen values and Nash Equilibria W e can find several results in the literature providing sufficient conditions for the existence of a unique Nash equilibrium in games with linear best response functions in terms of the eigen values of the network of influences. W e enumerate belo w some suf ficient conditions that are related with our work: Pr oposition 2: Consider the class of games with linear best response functions described in Section II-B. For these games, we hav e the follo wing suf ficient conditions for the existence of a unique Nash equilibrium: ( i ) δ < − 1 /λ n ( A G ) , (Bramoull ´ e et al., [5]). ( ii ) δ < 1 /ρ ( A G ) , (Ballester et al., [6]). W e can compare the set of spectral conditions in Propo- sition 2 using the follo wing inequalities [5]: Lemma 3: For any simple graph G , we ha v e that − 1 /λ n ( A G ) ≥ 1 /ρ ( A G ) , where this inequality is strict when no component of G is bipartite. Remark 4: Hence, Condition ( i ) in Proposition 2 provides the best sufficient condition for the uniqueness of Nash equilibrium in these games. Furthermore, one can also prov e that under Condition (i) or (ii), all players are active at the equilibrium point, i.e., S = N [5]. In Section IV, we shall deri ve upper bounds on λ n ( A G ) in terms of structural properties of the network. These bounds, in combination with Condition ( i ) in Proposition 2, will allo w us to derive suf ficient conditions for the existence of a Nash equilibrium in terms of structural properties of the network. F . The Stability of Nash Equilibria W e present conditions for stability of a Nash equilibrium in terms of λ n ( A S ) . A Nash equilibrium x is asymptotically stable when the system of differential equations: ˙ x 1 = h 1 ( x ) = f 1 ( x ; δ, A G ) − x 1 , . . . ˙ x n = h n ( x ) = f n ( x ; δ, A G ) − x n , is locally asymptotically stable around x . One can prov e the following necessary and sufficient condition for an equilib- rium x to be asymptotically stable [5]: Lemma 5: An equilibrium profile x is asymptotically sta- ble if and only if δ < − 1 /λ n ( A S ) and δ P n j =1 a ij x j > 1 , for all inactive agents i ∈ N \ S . From the abov e lemma and Remark 4, we conclude that if δ < − 1 /λ n ( A G ) , there is a unique Nash equilibrium and it is asymptotically stable. These results show the close connection between the smallest and the largest eigen values of the adjacency matrix of interactions and the outcome of games with linear best response functions in a network. On the other hand, the results in this section are applicable if we are able to compute the eigenv alues of A G . For many large- scale complex networks, the structure of the network can be very intricate [9]- [11] —in many cases not e ven known exactly— and an explicit eigen value decomposition can be very challenging to compute, if not impossible. In many practical settings, instead of having access to the complete network topology , we have access to local neighborhoods of the network structure around a set of nodes. In this context, it is important to understand the impact of local structural information on the eigenv alues of the adjacency matrix. In the rest of the paper, we propose a nov el methodology to compute optimal bounds on relev ant eigen values of A G from local information re garding the network structure. Our results allow us to study the role of local structural information in the outcome of games with linear best response functions. I I I . S P E C T R A L A N A L Y S I S O F T H E I N T E R AC T I O N M A T R I X W e study the relationship between a network’ s local struc- tural properties and the smallest eigen value of its adjacency matrix. Algebraic graph theory provides us with tools to relate the eigen v alues of a network with its structural prop- erties. Particularly useful is the follo wing well-kno wn result relating the k -th spectral moment of A G with the number of closed walks of length k in G [7]: Lemma 6: Let G be a simple graph. The k -th spectral moment of the adjacenc y matrix of G can be written as m k ( A G ) = 1 n n X i =1 λ k i = 1 n Ψ ( k ) G , (4) where Ψ ( k ) G is the set of all closed walks of length k in G . 3 From (4), we can easily compute the first three spectral moments of A G in terms of the number of nodes, edges and triangles as follows [7]: Cor ollary 7: Let G be a simple graph with adjacency matrix A G . Denote by n , e and ∆ the number of nodes, edges and triangles in G , respectively . Then, m 1 ( A G ) = 0 , (5) m 2 ( A G ) = 2 e/n, m 3 ( A G ) = 6 ∆ /n. Remark 8: Notice that the coef ficients 2 (resp. 6) in the abov e expressions corresponds to the number of closed w alks of length 2 (resp. 3) enabled by the presence of an edge (resp. triangle). Similar expressions can be deri ved for higher-order spectral moments, although a more elaborated combinatorial analysis in required. In our case, we are interested in the following expressions, deriv ed in [8], for the first fiv e spectral moments of G : Lemma 9: Let G be a simple graph. Denote by e , ∆ , Q and Π the total number of edges, triangles, quadrangles and 3 W e denote by | Z | the cardinality of a set Z . pentagons in G , respectiv ely . Define W 2 = P n i =1 d 2 i and C dt = P i d i t i , where t i is the number of triangles touching node i . Then, m 4 ( A G ) = 1 n [8 Q + 2 W 2 − e ] , (6) m 5 ( A G ) = 1 n [10Π + 10 C dt − 30∆] . (7) Observe how , as we increase the order of the moments, more complicated structural features appear in the expres- sions. In the following example, we illustrate how to use our expressions to compute the spectral moments of an online social network from empirical structural data. Example 10: In this example, we study a subgraph of Facebook obtained by exploring the online social network around a particular node, as follows. From a particular starting node, we crawl the network (using a breadth-first search) until we discover the set of all nodes that are within a radius 2 from the starting node. Using this set of nodes, and their interconnections (friendships), we construct a social subgraph F that has 2 , 404 nodes and 22 , 786 edges. Using this real dataset, we compute the degrees d i , the number of triangles t i , quadrangles q i , and pentagons p i touching each node i ∈ V ( F ) . In Fig. 1, we plot the distributions of degrees and triangles, as well as a scatter plot of t i versus d i (where each point has coordinates ( d i , t i ) , in log-log scale, for all i ∈ V ( F ) ). W e can aggregate those quantities that are rele vant to compute the spectral moments to obtain the following numerical v alues: e/n = P d i / 2 n = 9 . 478 , ∆ /n = P t i / 3 n = 28 . 15 , Q/n = P q i / 4 n = 825 . 3 , Π /n = P p i / 5 n = 31 , 794 , W 2 /n = P d 2 i /n = 1 , 318 , C dt /n = P d i t i /n = 8 , 520 . Hence, using Corollary 7 and Lemma 9, we obtain the following values for the spectral moments: m 1 ( A F ) = 0 , m 2 ( A F ) = 18 . 95 , m 3 ( A F ) = 168 . 9 , m 4 ( A F ) = 9 , 230 , and m 5 ( A F ) = 402 , 310 . In this section, we have derived expressions to compute the first five spectral moment of A G from network structural properties. In the ne xt section, we use semidefinite program- ming to e xtract information re garding eigen values of interest from a sequence of spectral moments. I V . O P T I M A L S P E C T R A L B O U N D S F RO M S P E C T R A L M O M E N T S Here, we introduce an approach to deri ve an upper bound on the smallest eigen values of A G from its sequence of spectral moments 4 . Since we ha ve expressions for the spectral moments in terms of local structural properties, our bounds relate the eigenv alues of a network with these properties. There is a lar ge literature studying the relationship between structural and spectral properties of graphs (see [12], [13], and references therein, for an extensi ve list of 4 As a by-product of our analysis, we also derive lower bounds on the spectral radius of A G , although these bounds are not essential in our analysis. spectral results). For many real-world networks, there is a particular set of structural properties that play a ke y role in the network’ s functionality . For example, it is well-known that social networks contain a large number of triangles (and other c ycles). Hence, it w ould be useful to hav e spectral bounds where these structural features are jointly represented. In this section, we deriv e new upper bounds on the smallest eigen value of the adjacency matrix in terms of the structural properties in volv ed in (5), (6) and (7). Our results can be easily extended to deri ve lo wer bounds on the spectral radius of the adjacency matrix, although this bound is not of relev ance in our analysis of games with linear best responses. Now , we deri v e bounds on the smallest eigen v alue of the adjacency matrix in terms of relev ant structural properties by adapting the optimization framework proposed in [14]. W e first need to introduce a probabilistic interpretation of a network eigenv alue spectrum and its spectral moments. For a simple graph G , we define its spectral density as: µ G ( x ) = 1 n n X i =1 δ ( x − λ i ) , (8) where δ ( • ) is the Dirac delta function and { λ i } n i =1 is the set of (real) eigen values of the (symmetric) adjacency matrix A G . Consider a random variable X with probability density µ G . The moments of X ∼ µ G are equal to the spectral moments of A G , i.e., E µ G X k = Z R x k µ G ( x ) dx = 1 n n X i =1 Z R x k δ ( x − λ i ) dx = 1 n n X i =1 λ k i = m k ( A G ) , for all k ≥ 0 . In [14], Lasserre proposed a technique to compute the smallest interv al [ a, b ] containing the support 5 of a positi ve Borel measure µ from its complete sequence of moments ( m r ) r ≥ 0 . In our spectral problem, the positi ve Borel measure under consideration is the spectral density µ G ( x ) , defined in (8). Hence, in the context of our problem, the sequence of moments ( m r ) r ≥ 0 is equal to ( m r ( A G )) r ≥ 0 , and the smallest interval [ a, b ] containing the support of µ G ( x ) is equal to [ λ n , λ 1 ] , by the definition in (8). Lasserre also proposed in [14] a numerical scheme to compute tight bounds on the values of a and b when a truncated sequence of moments ( m r ) 0 ≤ r ≤ k is known. This numerical scheme in v olves a series of semidefinite programs (SDP) in one variable. As we sho w below , at step s of this series of SDP’ s, we are given a sequence of moments ( m 1 , ..., m 2 s +1 ) and solve two SDP’ s whose solution provides an inner approximation [ α s , β s ] ⊆ [ a, b ] . In our case, since we hav e expressions for the first five spectral 5 Recall that the support of a finite Borel measure µ on R , denoted by supp ( µ ) , is the smallest closed set B such that µ ( R \ B ) = 0 . Fig. 1. In the left and center figures, we plot the distributions of degrees and triangles of the social network under study (in log-log scale). In the right figure, we include a scatter plot where each point has coordinates ( d i , t i ) , in log-log scale, for all the nodes in the social graph. moments, ( m 1 ( A G ) , ..., m 5 ( A G )) , we can solv e the first tw o steps of this series of SDP’ s to find inner approximations [ α s , β s ] ⊆ [ λ n , λ 1 ] . In other words, the solution to the SDP’ s provide us with the bounds α s ≥ λ n and β s ≤ λ 1 . In order to formulate the series of SDP’ s proposed in [14], we need to define the so-called localizing matrix of our problem [15]. Giv en a sequence of moments, m (2 s +1) = ( m 1 , ..., m 2 s +1 ) , our localizing matrix is a Hankel matrix defined as: H s ( c ) , R 2 s +1 − c R 2 s , (9) where R 2 s and R 2 s +1 are the Hankel matrices of moments defined as R 2 s = 1 m 1 · · · m s m 1 m 2 · · · m s +1 . . . . . . . . . . . . m s m s +1 · · · m 2 s , (10) R 2 s +1 = m 1 m 2 · · · m s +1 m 2 m 3 · · · m s +2 . . . . . . . . . . . . m s +1 m s +2 · · · m 2 s +1 . Hence, for a given sequence of moments, the entries of H s ( c ) depend affinely on the v ariable c . W e can compute α s and β s as the solution to the follo wing semidefinite programs [14]: Pr oposition 11: Let m (2 s +1) = ( m 1 , ..., m 2 s +1 ) be the truncated sequence of moments of a positive Borel measure µ . Then, a ≤ α s , max α { α : H s ( α ) < 0 } , (11) b ≥ β s , min β { β : − H s ( β ) < 0 } , (12) for [ a, b ] being the smallest interv al containing supp ( µ ) . Remark 12: Observe that α s and β s are the solutions to two SDP’ s in one v ariable, since the constraint H s ( α ) < 0 (resp. − H s ( β ) < 0 ) indicates that the matrix H s ( α ) (resp. − H s ( β ) ) is positi ve semidefinite and this matrix has affine entries with respect to α (resp. β ). Hence, they can be efficiently computed using standard optimization software (for example, CVX [16]). As we increase s in Proposition 11, more moments are in volved in the SDP’ s, and the resulting bounds become tighter, i.e., α s +1 ≤ α s and β s +1 ≥ β s . In the context of our spectral analysis, the Borel measure in Proposition 11 corresponds to the spectral density of a graph G , and the smallest interval [ a, b ] corresponds to [ λ n ( A G ) , ρ ( A G )] . Thus, Proposition 11 provides an ef ficient numerical scheme to compute the bounds α s ≥ λ n ( A G ) and β s ≤ ρ ( A G ) . When we are gi ven a sequence of fiv e spectral moments, we can solve the SDP’ s in (11) and (12) analytically for s = 2 . In this case, the localizing matrix is: H 2 ( c ) = m 1 − c m 2 − cm 1 m 3 − cm 2 m 2 − cm 1 m 3 − cm 2 m 4 − cm 3 m 3 − cm 2 m 4 − cm 3 m 5 − cm 4 . (13) As we proved in Section III, the spectral moments in the localizing matrix depend on the number of nodes, edges, cycles of length 3 to 5, the sum-of-squares of degrees W 2 , and the degree-triangle correlation C dt . Furthermore, for s = 2 , the optimal v alues α 2 and β 2 can be analytically computed, as follo ws. First, note that H 2 ( c ) < 0 (resp. − H 2 ( c ) < 0 ) if and only if all the eigen values of H 2 are nonnegati ve (resp. nonpositive). For a given sequence of fiv e moments, the characteristic polynomial of H 2 ( c ) can be written as φ 2 ( λ ) , det ( λI − H 2 ( c )) = λ 3 + p 1 ( c ) λ 2 + p 2 ( c ) λ + p 3 ( c ) , where p j ( c ) is a polynomial of degree j in the v ariable c (with coefficients depending on the moments). Thus, by Descartes’ rule, all the eigen v alues of H 2 ( c ) are nonpositiv e if and only if p j ( c ) ≥ 0 , for j = 1 , 2 , and 3 . Similarly , all the eigen values are nonnegati ve if and only if p 2 ( c ) ≥ 0 and p 1 ( c ) , p 3 ( c ) ≤ 0 . In fact, one can prove that the optimal value of α 2 and β 2 in (12) can be computed as the smallest and the largest roots of det H 2 ( c ) = 0 , which yields a third degree polynomial in the variable c [14]. There are closed-form expressions for the roots of this polynomial (for example, Cardano’ s formula [17]), although the resulting expressions for the roots are rather complicated. In this subsection, we ha ve presented a con ve x optimiza- tion framework to compute optimal bounds on the maximum Fig. 2. Scatter plot of the spectral radius, ρ ( G i ) , versus the lower bound β 2 ( G i ) , where each point is associated with one of the 100 social subgraphs considered in our experiments. and the minimum eigen v alues of a graph G from a truncated sequence of its spectral moments. Since we have expressions for spectral moments in terms of local structural properties, these bounds relate the eigen v alues of a graph with its structural properties. V . N U M E R I C A L S I M U L A T I O N S As we illustrated in Section II, there is a close connection between the largest and the smallest eigen values of a network and the outcome of a game with linear best response func- tions. In this section, we use our bounds on the support of the eigen v alue spectrum to study the role of structural properties in the existence and the stability of a Nash equilibrium. For this purpose, we analyze real data from a regional network of Facebook that spans 63 , 731 users (nodes) connected by 817 , 090 friendships (edges) [18]. In order to corroborate our results in different network topologies, we extract multiple medium-size social subgraphs from the Facebook graph by running a Breath-First Search (BFS) around different starting nodes. Each BFS induces a social subgraph spanning all nodes 2 hops away from a starting node, as well as the edges connecting them. W e use this approach to generate a set G = { G i } i ≤ 100 of 100 different social subgraphs centered around 100 randomly chosen nodes. 6 From Corollary 7 and Lemma 9 we can compute the first five spectral moments of a graph G i from the fol- lowing structural properties: number of nodes ( n i ), edges ( e i ), triangles ( ∆ i ), quadrangles ( Q i ), pentagons ( Π i ), as well as the sum-of-squares of the degrees ( W i ), and the degree-triangle correlation ( C i ). For con venience, we define S ( G i ) , { n i , e i , ∆ i , Q i , Π i , W i , C i } as a set of relev ant structural properties of G i . In our numerical experiment, we first measure the set of relev ant properties S i for each social subgraph G i ∈ G , and then compute the first fi ve spectral moments of its adjacency matrix. From these moments, 6 Although this procedure is common in studying large social network , it introduces biases that must be considered carefully [19]. Fig. 3. Scatter plot of − λ min ( G i ) versus the bound − α 2 ( G i ) , where each point is associated with one of the 100 social subgraphs considered in our experiments. we then compute the bounds α 2 ( G i ) and β 2 ( G i ) using Proposition 11. As we mentioned before, these bounds can be computed as the maximum and minimum roots of a third order polynomial, for which closed form expressions are known. W e illustrate the quality of our bounds in the following figures. Fig. 2 is a scatter plot where each circle has coordinates ( ρ ( G i ) , β 2 ( G i )) , for all G i ∈ G . Observe how the spectral r adii ρ ( G i ) of these social subgraphs are r emarkably close to the theoretical lower bound β 2 ( G i ) . Therefore, we can use β 2 ( G i ) as an estimate of ρ ( G i ) for social subgraphs. In Fig. 3 we include a scatter plot where each circle has coordinates ( − λ n ( G i ) , − α 2 ( G i )) , for all G i ∈ G . Although α 2 ( G i ) is a looser bound than β 2 ( G i ) , we observe how there is a strong correlation between the value of λ n ( G i ) and α 2 ( G i ) . In these numerical experiments, we have first showed that α 2 ( G i ) and β 2 ( G i ) bound the smallest and the lar gest eigen v alues of the adjacency matrix, and that these bounds are tight, specially β 2 ( G i ) . Since these bounds can be written as explicit functions of the structural properties in S ( G i ) , we can estimate the impact of structural perturbations on the spectral radius and the smallest eigen value by studying ∂ β 2 / ∂ p i and ∂ α 2 / ∂ p i for p i ∈ S ( G i ) . (Details of this perturbation analysis are left for future work due to space limitations.) V I . C O N C L U S I O N S In this paper , we hav e studied games with linear best response functions in a network ed context. W e ha ve focused on analyzing the role of the network structure on the game outcome. In particular, the existence and the stability of a unique Nash equilibrium in this class of games are closely related with the smallest eigen v alue of the adjacency matrix of the network. W e take this spectral result as the foundation to our work, and use algebraic graph theory and conv ex optimization to study how local structural properties of the network af fect this eigen v alue. In particular , we hav e deriv ed expressions for the first fiv e spectral moments of the adjacenc y matrix in terms of local structural properties. These structural properties are: the number of nodes and edges, the number of c ycles of length up to 5, the sum-of- squares of the degrees, and the degree-triangle correlation. From this sequence of five spectral moments, we propose a nov el methodology to compute optimal bounds on the smallest and the largest eigen v alues of the adjacency matrix by solving two semidefinite programs. In our case, we are able to find analytical solutions to these optimal bounds by computing the roots of a cubic polynomial, for which closed- form expressions are a vailable. Finally , we ha ve verified the quality of our bounds by running numerical simulations in a set of 100 online social subgraphs. For future work, we shall use the results herein presented to study the effect of structural perturbations in the relev ant eigen v alues of the adjacency matrix, and in properties of the Nash equilibrium. R E F E R E N C E S [1] D. Fudenber g and J. Tirole, Game Theory , MIT Press, 1991. [2] G.-M. Angeletos and A. Pa v an, “Efficient Use of Information and Social V alue of Information, ” Econometrica , v ol. 75, pp. 1103-1142, 2007. [3] C. Ballester, A. Calv ´ o-Armengol, and Y . Zenou, “Who´s Who in Networks. W anted: The K ey Player, ” Econometrica , vol 74, pp. 1403- 1417, 2006. [4] Y . Bramoull ´ e and R. Kranton, “Public Goods in Networks, ” Journal of Economic Theory , v ol. 135, pp. 478-494, 2007. [5] Y . Bramoull ´ e, R. Kranton, and M. D’Amours, “Strategic Interaction and Networks, ” CIRPEE W orking P aper 10-18, 2010. [6] C. Ballester and A. Calv ´ o-Armengol, “Moderate Interactions in Games with Induced Complementaries, ” mimeo, Univ ersidad Aut ´ onoma de Barcelona, 2007. [7] N. Biggs, Alg ebraic Graph Theory , Cambridge University Press, 2 nd Edition, 1993. [8] V .M. Preciado and A. Jadbabaie, “From Local Measurements to Network Spectral Properties: Beyond Degree Distributions, ” Proc. IEEE Conference on Decision and Contr ol , 2010. [9] S.H. Strogatz, “Exploring Comple x Networks, ” Natur e , v ol. 410, pp. 268-276, 2001. [10] S. Boccaletti S., V . Latora, Y . Moreno, M. Chavez, and D.-H. Hwang, “Complex Networks: Structure and Dynamics, ” Physics Reports , vol. 424, no. 4-5, pp. 175-308, 2006. [11] V .M. Preciado, Spectral Analysis for Stochastic Models of Large-Scale Complex Dynamical Networks , Ph.D. dissertation, Dept. Elect. Eng. Comput. Sci., MIT , Cambridge, MA, 2008. [12] D. Cvetkovi ´ c, M. Doob and H. Sachs, Spectra of Graphs , Wiley-VCH, 3 rd Edition, 1998. [13] K.C. Das and P . Kumar , “Some New Bounds on the Spectral Radius of Graphs, ” Discrete Mathematics , vol. 281, pp. 149-161, 2004. [14] J.B. Lasserre, “Bounding the Support of a Measure from its Marginal Moments, ” Pr oc. AMS , in press. [15] J.B. Lasserre, Moments, P ositive P olynomials and Their Applications , Imperial College Press, London, 2009. [16] < http://cvxr .com/cvx/ > [17] M. Abramowitz and I.A. Stegun, Handbook of Mathematical Func- tions with F ormulas, Graphs, and Mathematical T ables , Dov er , 1965. [18] B. V iswanath, A. Mislove, M. Cha, and K.P . Gummadi, “On the Evolution of User Interaction in Facebook, ” Proc. ACM SIGCOMM W orkshop on Social Networks , 2009. [19] M. Stumpf, C. W iuf, and R. May , “Subnets of Scale-Free Networks are not Scale-Free: Sampling Properties of Networks, ” Proceedings of the National Academy of Sciences , v ol. 102, pp. 4221-4224, 2005.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment