Learning Active Basis Models by EM-Type Algorithms
EM algorithm is a convenient tool for maximum likelihood model fitting when the data are incomplete or when there are latent variables or hidden states. In this review article we explain that EM algorithm is a natural computational scheme for learnin…
Authors: Zhangzhang Si, Haifeng Gong, Song-Chun Zhu
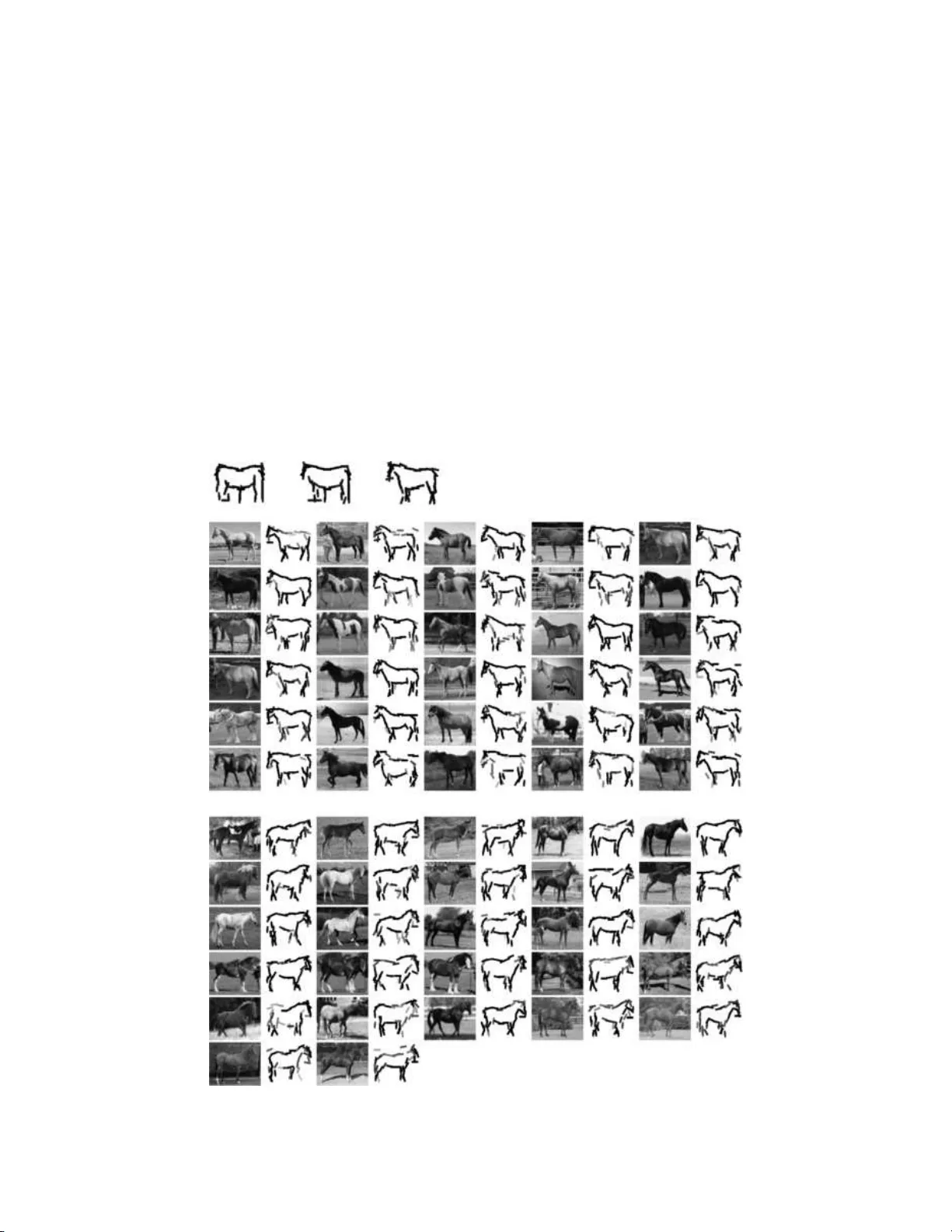
Statistic al Scienc e 2010, V ol. 25, No. 4, 458– 475 DOI: 10.1214 /09-STS281 c Institute of Mathematical Statisti cs , 2010 Lea rning Active Basis Mo dels b y EM-T yp e Algo rithms Zhangzhang Si , Hai feng Go ng , Song-Chun Zhu and Ying Nian W u Abstr act. EM algorithm is a con ve nient to ol for maximum lik eliho o d mo del fitting when the data are incomplete or w h en there are laten t v ariables or hid den states. In this review article we explain that EM algorithm is a natural compu tational scheme for learning im age tem- plates of ob ject catego ries where the learning is not f u lly su p ervised. W e represent an image template b y an activ e basis mo del, whic h is a linear comp osition of a selected set of localized, elo ngated and oriente d w a v elet elemen ts that are allo we d to slightly p ertur b their lo cations and orientat ions to accoun t for the d eformations of ob ject sh ap es. The mo del can b e easily learned when the ob jects in the training images are of the same p ose, and app ear at the same location and scale. T h is is often called sup e rvised learning. In the situation wh ere the ob jects ma y app ear at differen t unknown locations, orien tations and scales in the training images, we ha v e to incorp orate the unkn o wn lo cations, orien tations and scales as latent v ariables into the image generatio n pro cess, and learn the template by EM-type algorithms. The E -step im- putes the u nknown lo cations, orien tations and scales based o n th e cur- ren tly learned template. T h is step can b e considered self-sup ervision, whic h inv olve s using the current template to r ecognize the ob jects in the training images. Th e M-step then relearns the template b ased on the impu ted lo cations, orien tations and scales, and this is essential ly the same as sup ervised learning. So the EM learning pro cess iterates b et wee n reco gnition and sup ervised learnin g. W e illustrate th is sc heme b y sev eral exp eriments. Key wor ds and phr ases: Generativ e mo dels, ob ject r ecognition, wa vel et sparse cod ing. Zhangzhang Si is Ph.D. Student, Dep artment of Statistics, University o f California, L os Angel es, USA e-mail: zzsi@stat.ucla.e du . Haifeng Gong is Postdo ctor al R ese ar cher, Dep artment of Statistics, University of Califo rnia, L os A ngeles, USA and L otu s Hil l R ese ar ch Institute, Ezhou, China e-mail: hfgong@stat.ucla.e du . Song-Chun Zhu is Pr ofessor, Dep artment of St atistics, University of C alifornia, L os Angeles, USA and L otus Hil l R ese ar ch Institute, E zhou, China e-mail: sczhu@stat.ucla.e du . Ying Nian Wu is Pr ofessor, Dep artment of Statistics, University of Califo rnia, L os Angele s, USA e-mail: y wu@st at.ucla.e du . 1. INTRODUCTION: EM LEARNING S CHEME The EM alg orithm [ 7 ] and its v ariations [ 14 ] hav e b een widely used for maxim um lik eliho o d estimation of statistical mo dels when the data are incompletely observ ed or when there are laten t v ariables or hid- den states. This algorithm is an iterativ e computa- tional scheme, where the E-step imputes the miss- ing data or the laten t v ariables giv en the curren tly This is a n electronic r eprint o f the original article published by the Institute of Ma thema tical Statistics in Statistic al Scienc e , 2010, V ol. 25, No. 4, 458–47 5 . This reprint differ s from th e original in paginatio n and t yp ogr aphic detail. 1 2 SI, GON G, ZH U A N D WU estimated mo d el, and the M-step re-esti mates the mo del giv en the impu ted missing data or laten t v ari- ables. Be sides its simplicit y and stabilit y , a key fea- ture that distinguishes th e EM algorithm f rom other n umerical metho ds is its inte rpr etabilit y: b oth the E-step and the M-step readily admit natural inter- pretations in a v ariety of con texts. This makes the EM alg orithm ric h, m eanin gfu l and inspiring. In this review article w e shall fo cus on one imp or- tan t context w here the EM algorithm is useful and meaningful, that is, learning patterns from signals in the sett ings that are not fully sup ervised. In t his con text, th e E -step can b e inte rpr eted as carrying out th e recognition task u s ing the c urr en tly le arned mo del of the pattern. The M-step can b e inte rpr eted as relearning the p attern in the sup ervised setting, whic h can often b e easily acco mplished. This EM learnin g scheme has b een used in b oth sp eec h and vision. In sp eec h recognition, the train- ing of the hidden Marko v mo del [ 16 ] inv olves the imputation of th e hid den states in the E-step by the forwa rd and backw ard algorithms. The M-step computes the tran s ition and emission fr equ encies. In computer vision, we w an t to learn mod els for differ- en t categories of ob jects, such as horses, bird s, bik es, etc. The learning is ofte n easy when th e ob jects in the training images are aligned, in the s ense that the ob jects a pp ear at the same p ose, same location and same scale in the training images, which are defi ned on a common image lattice that is the b ound ing b ox of th e ob jects. T his is often called sup er v ised le arn- ing. How ev er, it is often the case that the ob jects app ear at differen t unkn o wn lo cations, orien tations and scales in the training images. In suc h a situa- tion, w e h a v e to incorp orate the un k n o wn lo cations, orien tations and scales as laten t v ariables in the im- age generation pro cess, and u se the EM algorithm to learn t he mo del for the ob jects. In the EM learning pro cess, the E -step impu tes the unknown lo cation, orien tation and scale of the ob ject in eac h training image, based on the currently learned m o del. Th is step uses the current mo del to recognize the ob ject in eac h training image, that is, wh er e it is, at what orien tation and scale. The imputation of the laten t v ariables enables us to al ign the training images, so that the ob jects app ear at the same location, ori- en tation and scale. The M-step then relearns the mo del from the alig ned images b y carrying out su- p ervised learning. S o the EM learning pro cess it- erates betw een recog nition and su p ervised learning. Recognitio n is the goal of learnin g the mo del, and it serve s as the self-sup ervision step of the learnin g pro cess. The EM algorithm has b een used b y F ergus, P erona and Zisserman [ 9 ] in training the constella- tion mo del for ob jects. In this article we sh all illus tr ate EM learning or EM-lik e learnin g by training an activ e basis mo del [ 22 , 23 ] that w e ha v e recen tly d ev elop ed for deformable templates [ 1 , 24 ] of ob ject shap es. In this mo d el, a template is repr esen ted by a linear comp osition o f a set of localized, elonga ted and orien ted w av elet ele- men ts at se lected lo cations, scales and o rienta tions, and these w a v elet elemen ts are allo wed to sligh tly p ertur b their lo cations and orien tations to accoun t for the shap e deformations of the ob jects. In the sup ervised setting, the activ e b asis mo del can b e learned b y a shared ske tc h algorithm, whic h selects the w a v elet elemen ts sequenti ally . When a wa v elet elemen t is selected, it is shared by all the training images, in the sense th at a p erturb ed ve rsion of this elemen t seeks to sk etc h a lo cal edge segment in eac h training image. In the situations where learning is not fu lly sup er v ised , the learnin g of the activ e ba- sis mo del can b e accomplished b y the E M-t yp e al- gorithms. The E-step r ecognizes the ob ject in eac h training image by m atc hin g the image with the cur - ren tly learned activ e basis template. This enables us to alig n the images. The M-step then relearns the template from the aligned images by the sh ared sk etc h algorithm. W e w ould like to p oin t out that the EM algo- rithm for learning the activ e b asis mo del is differen t than the traditional EM algorithm, wh ere the mo del structure is fixed and only the parameters need to b e estima ted. In our implemen tation of the EM al- gorithm, th e M-step needs t o select the w a velet ele- men ts in addition to estimating the parameters asso- ciated with th e selected elemen ts. Both the selection of the elemen ts and the estimation of the p arameters are accomplished by maximizing or increasing the complete-data log-lik eliho o d . So th e EM algorithm is used for estimating b oth the m o del stru cture and the associated parameters. Readers who wish to l earn more ab out the activ e basis mod el are referred to our recen t pap er [ 23 ], whic h is written for the compu ter vision comm unit y . Compared to that pap er, this review pap er is writ- ten for the statistical comm u nit y . In this pap er w e in tro du ce th e activ e basis mo del from an algorith- mic p ersp ectiv e, starting from the familiar problem of v ariable selec tion in linear regression. This p ap er LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 3 also pro vides more details ab out the EM-t yp e algo - rithms than [ 23 ]. W e wish to con v ey to the statistical audience that the problem of vision in general and ob ject recognitio n in particular is essentia lly a sta- tistical problem. W e ev en hop e that this article ma y attract some statisticians to work on this interesting but c h allenging problem. Section 2 introdu ces the activ e basis mo d el for represent ing deformable templates, and describ es the shared sk etch algorithm for su p ervised learning. Sec- tion 3 p resen ts the EM algorithm for learning the activ e basis mod el in the settings that are not f u lly sup ervised. Sect ion 4 concludes with a discussion. 2. A CTIVE BASIS MODEL: AN ALGORITHMIC TOUR The activ e basis mo d el is a n atural generalizat ion of the w a v elet r egression mo del. In this section w e first explain the bac kground and mot iv ation for the activ e b asis mo del. Then we w ork through a series of v ariable selection algorithms for w av elet regression, where the ac tiv e basis model emerges naturally . 2.1 From W a velet Regression to Active Basis 2.1.1 p > n r e gr ession and va riable se ction W av e- lets hav e pro v en to b e imm ensely usefu l for signal analysis and representat ion [ 8 ]. V ario us dictionaries of w a v elets ha ve b een designed for d ifferent t yp es of signals or f unction sp aces [ 4 , 19 ]. Two k ey factors underlying the successes of w a v elets are the spar- sit y of the repr esen tation and the efficiency of the analysis. Sp ecifically , a signal can typica lly b e rep- resen ted by a linear sup erp osition of a small num- b er of w a v elet elemen ts selected fr om an approp r iate dictionary . The selection can b e accomplished b y ef- ficien t algorithms s u c h as matc hing p ursuit [ 13 ] and basis pursuit [ 5 ]. F rom a linear regression p ersp ectiv e, a signal can b e considered a resp onse v ariable, and the wa v elet elemen ts in the dictionary can b e considered the predictor v ariables or regressors. Th e n umber of ele- men ts in a dictionary can often b e muc h greater than the dimensionalit y of the signal, so this is th e so- called “ p > n ” problem. Th e selectio n of the wa vel et elemen ts is the v ariable selection problem in linear regression. T he matc hing p ursuit algorithm [ 13 ] is the fo rward selectio n metho d , and the basis pursuit [ 5 ] is the la sso metho d [ 21 ]. Fig. 1. A c ol le ction of Gab or wavelets at differ ent lo c ations, orientations and sc ales. Each Gab or wavelet el ement is a si ne or c osine wave multipli e d by an elongate d and oriente d Gaus- sian function. The wave pr op agates along the sho rter axis of the Gaussian function. 2.1.2 Gab or wavelets and simple V1 c el ls Int er- estingly , w av elet sparse co d ing also app ears to b e emplo y ed b y the biolog ical visu al system for repr e- sen ting natur al images. By assuming the spars it y of the linear r epresen tation, Olsh ausen and Field [ 15 ] w ere able t o learn from natur al images a dicti onary of localized, elongate d, and oriented b asis functions that resem ble the Gab or w av elets. Similar w a ve lets w ere also obtained by indep endent comp onen t anal- ysis of natur al images [ 2 ]. F rom a linear r egression p ersp ectiv e, Olshausen an d Field essentia lly asked the follo w ing qu estion: Giv en a sample of resp onse v ectors (i.e., natural images), can we fi nd a d ictio- nary of predictor v ectors or regressors (i.e., b asis functions or b asis elemen ts), so that eac h resp ons e v ector can b e rep resen ted as a linear com bination of a sm all num b er of regressors select ed from the d ic- tionary? Of course, f or differen t resp onse v ectors, differen t sets of regressors ma y be sele cted from the dictionary . Figure 1 displa ys a collectio n of Gab or wa ve let ele- men ts at differen t lo cations, orient ations and scales. These are sine and c osine w a v es m ultiplied b y elon- gated and orien ted Gaussian functions, wh ere th e w a v es propagate along the shorter axes of the Gaus- sian functions. Su ch Gab or w a v elets ha v e b een pro- p osed as mathematical mo dels for the receptiv e fi elds of the simple cells of th e primary visual cortex or V1 [ 6 ]. The dictionary of all the Gab or wa v elet elemen ts can b e ve ry large, b ecause at eac h pixel of th e image domain, there can b e man y Gab or wa vele t elemen ts tuned to different scales and orient ations. Accord- ing to Olshausen and Field [ 15 ], the biologica l vi- 4 SI, GON G, ZH U A N D WU Fig. 2. A ctive b asi s templates. Each Gab or wavelet element is i l lustr ate d by a b ar of the same length and at the same lo c ation and orientation as the c orr esp onding element. The first r ow di splays the tr aining images. The se c ond r ow displays the templates c omp ose d of 50 Gab or wavelet e lements at a fixe d sc ale, wher e the first template is the c ommon d eformable t emplate, and the other templates ar e deforme d templates for c o ding the c orr esp onding im ages. The thir d r ow displays the templates c omp ose d of 15 Gab or wavelet elements at a sc ale ab out twic e as lar ge as those in the se c ond r ow. In the last r ow, the template is c omp ose d of wavelet elements at multiple sc ales, wher e lar ger Gab or elements ar e il lustr ate d by b ars of lighter shades. The r est of the images ar e r e c onstructe d by line ar sup erp ositions of the wavelet el ements of the deforme d templates. sual sys tem represents a n atur al image b y a linear sup erp osition of a small num b er of Gab or w a v elet elemen ts selecte d fr om suc h a dictionary . 2.1.3 F r om generic classes to sp e cific c ate gories W a velet s are designed for generic function classes or learned from generic ensem bles suc h as natural im - ages, under the generic principle of sparsit y . While suc h generalit y offers enormous scop e for the appli- cabilit y of wa v elets, sparsit y alone is clearly inad- equate for mo deling sp ecific patterns. Recen tly , we ha v e dev elop ed an activ e basis mo d el for images of v arious ob ject classes [ 22 , 23 ]. Th e mo d el is a n atural consequence of seeking a c ommon w a v elet represen- tation simultaneo usly for m ultiple training imag es from the same o b ject categ ory . The activ e basis can b e learned b y the shared sk etc h algorithm that w e hav e recen tly d ev elop ed [ 22 , 23 ]. This algorithm can b e considered a paral- leled v ersion of the matc hing pu rsuit algorithm [ 13 ]. It can also b e considered a mo d ification of the pro- jection pu rsuit algorithm [ 10 ]. The algorithm selects the wa vele t elements sequ entially from the dictio - nary . Eac h time when an element is s elected, it is shared by all th e training images in the sense that a p er tu rb ed version of this ele ment is included in the linear represen tation of eac h image. Figure 3 il- lustrates th e shared sk etc h process for obtaining the templates displa ye d in t he sec ond and third ro ws of Figure 2 . Figure 2 illustrates the basic idea . I n the first r o w there are 8 images of deer. The images are of the same s ize of 122 × 120 pixels. The d eer app ear at the same lo cation, scale and p ose in these images. F or these v ery similar images, w e wan t to s eek a com- mon wa v elet rep r esen tation, instead of co ding eac h image in dividually . Sp ecifically , w e w ant th ese im- ages to b e rep r esen ted b y similar sets of wa v elet ele- men ts, with similar co efficien ts. W e ca n achiev e this b y selecting a common set of w a v elet elemen ts, while allo wing these w a v elet eleme nts to lo cally p erturb their lo cations and orien tations b efore they are lin- early combined to code eac h individu al image. The p ertur bations are introduced to accoun t f or shap e deformations in the deer. The linear basis formed b y s uc h per tu rbable wa vel et elemen ts is called an activ e b asis. This is illustrated by the second and third rows of Figure 2 . In eac h ro w the first plot disp la ys the com- mon set of Gabor w a velet elemen ts selected from a dictionary . The dictionary consists of Gab or w a v elets at all the locations and orien tations, but at a fixed scale. Each Gab or w a velet element is symb olically illustrated b y a bar a t the same location and orien- tation and with the same length as the corresp ond- ing Gab or wa ve let. So the ac tiv e basis formed by the selected Gab or wa v elet element s ca n b e in ter- preted as a template, as if eac h elemen t is a stroke for ske tc hing the template. The templates in the sec- ond and third ro ws are learned u sing dictionaries of LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 5 Fig. 3. Shar e d ske tch pr o c ess f or le arning the active b asis templates at two differ ent sc al es. Gab or w a v elets at t w o differen t scales, w ith the scale of the th ird ro w ab out t wice as large a s the scale o f the second ro w. The n umb er of Gab or w a v elet ele- men ts of the template in the second ro w is 50, while the num b er of elemen ts of the te mplate in the th ird ro w is 15. Cur ren tly , we treat this n umber a s a tun- ing parameter, although they can b e determined in a more principled w ay . Within eac h o f the second and third ro ws, and for eac h training image , we plot th e Gab or w a ve let ele- men ts that are a ctually used to represen t the corre- sp ond ing i mage. T hese elemen ts are p erturb ed v er- sions of the corresp onding elemen ts in the fir st col- umn. So the templates in the first column are d e- formable templates, and the templates in the re- maining columns are d eformed templates. Th us, the goal of seeking a common wa vel et rep resen tation for images from the same ob ject category leads us to form ulate the activ e basis, whic h is a deformable template for the imag es fr om the o b ject catego ry . In th e last ro w of Figure 2 , the common template is learned by selecting from a dictionary th at con- sists of Ga b or wa v elet elemen ts at multiple scales instead of a fixed scale. In add ition to Gab or wa v elet elemen ts, we also include the cen ter-sur r ound d iffer- ence of Gaussian wa v elet element s in the dictionary . Suc h isotropic wa vel et element s are of large scales, and they mainly capture the regio nal co ntrasts in the images. In the template in the last ro w, the n umb er of selecte d wa v elet elemen ts is 50. Larger Gab or w av elet element s are illustrated b y bars of ligh ter shades. The difference of Gaussian elements are illustrated b y circles. The remaining images are reconstructed b y such m u lti-scale wa v elet represen- tations, where eac h image is a linear sup erp osition of the Gab or and difference of Gaussian w a v elet el- emen ts of the corresp onding deformed templates. While selecting the w a velet elemen ts of the activ e basis, w e also estimate the d istributions o f their co- efficien ts from the training images. This giv es us a statistica l mo del for the images. After learning this mo del, we can then use it to r ecognize the same t yp e of ob jects in te sting images. See Figure 4 for an ex- ample. The image on the left is the observ ed testing image. W e scan the learned temp late of deer o v er this image, and at ea c h location, w e matc h th e tem- plate to the image b y deforming the learned tem- plate. The template matc hing is scored by th e log- lik eliho o d of t he statistic al mo d el. W e also scan the template o v er multiple resolutions of the image to accoun t for the un kno wn scale of the ob ject in the image. Then w e choose the resolution and lo cation of the image with the maxim um like liho o d score, and sup erp ose on the image the d eformed template matc h ed to the image, as sho wn by the image on the righ t in Figure 4 . This pro cess ca n b e accomplished b y a cortex-lik e archite cture of su m maps and max maps, to b e d escrib ed in Section 2.11 . In mac hine learning and computer vision literature, detecting or classifying ob j ects using the learned mo d el is often called inference. The inference algorithm is often a part of the learning alg orithm. F or the act ive b asis mo del, b oth learning and inference can b e formu- lated as maxim u m like liho o d estimati on problems. Fig. 4. L eft: T esting i m age. Right: Obje ct is dete cte d and sketche d by the de forme d template. 6 SI, GON G, ZH U A N D WU 2.1.4 L o c al maximum p o oling and c omplex V1 c e l ls Besides wa v elet sparse co ding th eory for V1 simple cells, another inspiration to the activ e basis mo del also comes from neuroscience. Riesenhub er and Po g- gio [ 17 ] observe d th at the complex cells of the p ri- mary visual cortex or V1 app ear to p erform lo cal maxim um p o oling of the resp onses from simple cells. F rom the p ersp ectiv e of the activ e basis mo del, this corresp onds to estimating the p erturb ations of the w a v elet elemen ts of the activ e basis template, so that the template is deformed to matc h th e observ ed image. Therefore, if w e are to b elieve Olsh ausen and Field’s theory on wa vel et sparse codin g [ 15 ] and Riesenh ub er and P oggio ’s t heory on lo cal maxim um p o oling, then the activ e basis mo d el seems to b e a v ery natural logica l consequence. In the follo wing su bsections we sh all d escrib e in detail w av elet sparse co d ing, the activ e basis mo d el, and the lea rnin g and inference alg orithms. 2.2 An Overcomplete Dictiona ry of Gab o r W a velets The Gab or wa ve lets are translated, rotated and dilated v ersions of the follo wing function: G ( x 1 , x 2 ) ∝ exp {− [( x 1 /σ 1 ) 2 + ( x 2 /σ 2 ) 2 ] / 2 } e ix 1 , whic h is sine–co sine w a v e m ultiplied b y a Gaussian function. The Gaussian function is elongated alo ng the x 2 -axis, with σ 2 > σ 1 , and the sine–cosine wa v e propagates along the shorter x 1 -axis. W e truncate the function to make it locally sup p orted on a finite rectangular domain, so th at it has a well defined length and width. W e then trans late, r otate and dilate G ( x 1 , x 2 ) to obtain a ge neral f orm of the Ga b or w av elets: B x 1 ,x 2 ,s,α ( x ′ 1 , x ′ 2 ) = G ( ˜ x 1 /s, ˜ x 2 /s ) /s 2 , where ˜ x 1 = ( x ′ 1 − x 1 ) cos α + ( x ′ 2 − x 2 ) sin α, ˜ x 2 = − ( x ′ 1 − x 1 ) sin α + ( x ′ 2 − x 2 ) cos α. W riting x = ( x 1 , x 2 ), eac h B x,s,α is a lo calized fu nc- tion, w here x = ( x 1 , x 2 ) is th e cen tral location, s is the scale parameter, and α is the orientat ion. The frequency of the wa v e p ropagation in B x,s,α is ω = 1 /s . B x,s,α = ( B x,s,α, 0 , B x,s,α, 1 ), wh ere B x,s,α, 0 is the eve n-symm etric Gab or cosine comp on ent, and B x,s,α, 1 is the od d-symmetric Gab or sine comp o- nen t. W e alw ays u se Gab or wa vel ets as p airs of co- sine and sine comp onen ts. W e normalize b oth the Gab or sine and cosine comp onen ts to ha ve zero mean and u nit ℓ 2 norm. F or eac h B x,s,α , th e pair B x,s,α, 0 and B x,s,α, 1 are orthogonal to eac h other. The dictionary of Ga b or w a v elets is Ω = { B x,s,α , ∀ ( x, s, α ) } . W e can discretize the orienta tion so that α ∈ { oπ /O , o = 0 , . . . , O − 1 } , th at is, O equally spaced orien ta- tions (the default v alue of O is 15 in our exp eri- men ts). In this article w e m ostly learn the activ e basis template at a fixed scale s . The dictionary Ω is called “o v ercomplete” b ecause the num b er of w a v elet elemen ts in Ω is larger than the num b er of pixels in the image domain, since at eac h pixel, ther e can b e man y w a v elet elemen ts tuned to different ori- en tations and scales. F or an image I ( x ), with x ∈ D , where D is a set of pixels, suc h as a rectangular grid, we ca n p r o ject it on to a Gab or wa vele t B x,s,α,η , η = 0 , 1 . Th e p ro jec- tion of I on to B x,s,α,η , or the Gab or filter resp onse at ( x, s, α ) , is h I , B x,s,α,η i = X x ′ I ( x ′ ) B x,s,α,η ( x ′ ) . The summation is o v er the finite supp ort of B x,s,α,η . W e write h I , B x,s,α i = ( h I , B x,s,α, 0 i , h I , B x,s,α, 1 i ). The lo cal energy is |h I , B x,s,α i| 2 = h I , B x,s,α, 0 i 2 + h I , B x,s,α, 1 i 2 . |h I , B x,s,α i| 2 is the l o cal sp ectrum or the magnitude of the local wa v e in image I at ( x, s, α ). Let σ 2 s = 1 | D | O X α X x ∈ D |h I , B x,s,α i| 2 , where | D | is the n umber of pixels in I , and O is the total num b er of orien tations. F or eac h image I , we normalize it to I ← I /σ s , so that differen t images are comparable. 2.3 Matching Pursuit A lgo rithm F or an image I ( x ) wh ere x ∈ D , w e seek to repre- sen t it b y I = n X i =1 c i B x i ,s,α i + U, (1) where ( B x i ,s,α i , i = 1 , . . . , n ) ⊂ Ω is a set of Gabor w a v elet elemen ts selected from the dictionary Ω , c i is t he co efficien t, and U is the u nexplained r esid- ual image. Recall that eac h B x i ,s,α i is a pair of LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 7 Gab or cosine and sine comp onents. So B x i ,s,α i = ( B x i ,s,α i , 0 , B x i ,s,α i , 1 ), c i = ( c i, 0 , c i, 1 ), and c i B x i ,s,α i = c i, 0 B x i ,s,α i , 0 + c i, 1 B x i ,s,α i , 1 . W e fix the scale p aram- eter s . In th e r epresen tation ( 1 ), n is often assu med to b e small, for example, n = 50. So the representati on ( 1 ) is called sparse r epresen tation or sp arse co d - ing. This represent ation translates a raw intensit y image with a h uge num b er of pixels in to a s k etc h with only a small num b er of strok es represented b y B = ( B x i ,s,α i , i = 1 , . . . , n ). Because of the spar- sit y , B captures the most visually meaningful el- emen ts in the imag e. The set of wa v elet elemen ts B = ( B x i ,s,α i , i = 1 , . . . , n ) can b e selected from Ω by the ma tc hing pu rsuit algorithm [ 13 ], whic h seeks t o minimize k I − P n i =1 c i B x i ,s,α i k 2 b y a greedy sc heme. Algorithm 0 (Matc hing p ursuit algorithm). 0. I n itialize i ← 0, U ← I . 1. L et i ← i + 1. Let ( x i , α i ) = arg max x,α |h U, B x,s,α i| 2 . 2. L et c i = h U, B x i ,s,α i i . Up date U ← U − c i × B x i ,s,α i . 3. S top if i = n , else go bac k to 1. In the ab ov e algorithm, it is p ossible that a wa vele t elemen t is selected more than once, but this is ex- tremely rare for real images. As to the c hoice of n or the stoppin g criterion, we can stop the algorithm if | c i | is b elo w a threshold. Readers wh o are familiar with the so-called “large p and small n ” pr ob lem in lin ear regression ma y ha v e recognized that w a v elet spars e co ding is a sp ecial case of this problem, where I is the resp onse v ec- tor, and eac h B x,s,α ∈ Ω is a p redictor vec tor. Th e matc h in g purs u it algorithm is actually the forw ard selection pro cedure for v ariable selectio n. The forw ard selection algorithm in general ca n b e to o greedy . But f or imag e repr esen tation, eac h Ga- b or wa ve let elemen t only explains aw a y a small part of th e image d ata, and we usu ally purs ue the ele- men ts at a fi xed scale, so such a forw ard selection pro cedur e is not ve ry greedy in this con text. 2.4 Matching Pursuit f o r Multiple Images Let { I m , m = 1 , . . . , M } b e a set of tr aining im - ages d efined on a common rectangle lattice D , and let us supp ose th at these images come from th e same ob ject category , where the ob jects ap p ear at the same p ose, lo cation and scale in these images. W e can mo del these images b y a common set of Gab or w a v elet element s, I m = n X i =1 c m,i B x i ,s,α i + U m , m = 1 , . . . , M . (2) B = ( B x i ,s,α i , i = 1 , . . . , n ) can b e considered a com- mon template for these training images. Mo del ( 2 ) is an extension of model ( 1 ). W e can select these element s by applying the m atc h- ing p ursu it algorithm on these multiple images si- m ultaneously . The algorithm seeks to min imize P M m =1 k I m − P n i =1 c m,i B x i ,s,α i k 2 b y a greedy sc h eme. Algorithm 1 (Matc h ing pursuit on m ultiple im- ages). 0. I n itialize i ← 0 . F or m = 1 , . . . , M , initialize U m ← I m . 1. i ← i + 1. Select ( x i , α i ) = arg max x,α M X m =1 |h U m , B x,s,α i| 2 . 2. F or m = 1 , . . . , M , let c m,i = h U m , B x i ,s,α i i , and up d ate U m ← U m − c m,i B x i ,s,α i . 3. S top if i = n , else go bac k to 1. Algorithm 1 is similar to Algorithm 0 . The differ- ence is that, in Step 1, ( x i , α i ) is selected b y maxi- mizing the sum of th e squ ared resp onses. 2.5 Active Basis and Lo cal Maximum Pooling The ob jects in the training images sh are similar shap es, but there can still b e considerable v ariations in their shap es. In order to acc ount for the sh ap e deformations, we introdu ce the p erturbations to the common template , and t he mo d el b ecomes I m = n X i =1 c m,i B x i +∆ x m,i ,s,α i +∆ α m,i + U m , (3) m = 1 , . . . , M . Again, B = ( B x i ,s,α i , i = 1 , . . . , n ) can b e considered a common temp late f or the training images, but this time, this template is deformable. Sp ecifically , for eac h image I m , the w av elet elemen t B x i ,s,α i is p er- turb ed to B x i +∆ x m,i ,s,α i +∆ α m,i , wh ere ∆ x m,i is the p ertur bation in lo cation, and ∆ α m,i is the p erturba- tion in orien tation. B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) can b e considered the d eformed template for cod in g image I m . W e call the basis formed by 8 SI, GON G, ZH U A N D WU B = ( B x i ,s,α i , i = 1 , . . . , n ) the activ e basis, and w e call (∆ x m,i , ∆ α m,i , i = 1 , . . . , n ) the activities or p er- turbations of the b asis elemen ts for image m . Mod el ( 3 ) is an exte nsion of mo del ( 2 ). Figure 2 illustr ates three examples o f activ e basis templates. In the second and third ro ws the templates in the first column are B = ( B x i ,s,α i , i = 1 , . . . , n ). The scale parameter s in the s econd ro w is smaller than the s in the third r o w. F or eac h row, the templates in the remain columns are the deformed templates B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) , for m = 1 , . . . , 8. Th e template in the last ro w should b e more precisely r epresent ed by B = ( B x i ,s i ,α i , i = 1 , . . . , n ), where eac h elemen t has its o wn s i auto- matically selected together with ( x i , α i ). In this ar- ticle w e f o cus on the situation where we fix s (default length of the w av elet element is 1 7 pixels). F or the activi t y or p erturbation of a w a v elet ele- men t B x,s,α , we assume that ∆ x = ( d cos α, d sin α ), with d ∈ [ − b 1 , b 1 ]. That is, w e allo w B x,s,α to sh ift its lo cation along its normal direction. W e also as- sume ∆ α ∈ [ − b 2 , b 2 ]. b 1 and b 2 are the b ound s f or the allo wed d isplacemen ts in lo cation and orienta - tion (default v alues: b 1 = 6 pixels, and b 2 = π / 15). W e define A ( α ) = { (∆ x = ( d cos α, d sin α ) , ∆ α ) : d ∈ [ − b 1 , b 1 ] , ∆ α ∈ [ − b 2 , b 2 ] } the set of all p ossible activities for a basis elemen t tuned to orien tation α . W e can con tinue to apply the matc hing pur s uit algorithm to the m ultiple trainin g images, the only difference is that w e add a lo cal maxim um p o oling op eration in S teps 1 a nd 2 . T he follo w ing a lgorithm is a greedy pro cedure to minimize the least squares criterion: M X m =1 I m − n X i =1 c m,i B x i +∆ x m,i ,s,α i +∆ α m,i 2 . (4) Algorithm 2 (Matc h ing pu rsuit with lo cal max- im um p o oling). 0. I n itialize i ← 0 . F or m = 1 , . . . , M , initialize U m ← I m . 1. i ← i + 1. Select ( x i , α i ) = arg max x,α M X m =1 max (∆ x, ∆ α ) ∈ A ( α ) |h U m , B x +∆ x,s, α +∆ α i| 2 . 2. F or m = 1 , . . . , M , retriev e (∆ x m,i , ∆ α m,i ) = arg max (∆ x, ∆ α ) ∈ A ( α i ) |h U m , B x i +∆ x,s,α i +∆ α i| 2 . Let c m,i ← h U m , B x i +∆ x m,i ,s,α i +∆ α m,i i , and up d ate U m ← U m − c m,i B x i +∆ x m,i ,s,α i +∆ α m,i . 3. S top if i = n , else go bac k to 1. Algorithm 2 is similar to Algorithm 1 . The differ- ence is that we add an extra local maximization op- eration in Step 1: max (∆ x, ∆ α ) ∈ A ( α ) |h U m , B x +∆ x,s, α +∆ α i| 2 . With ( x i , α i ) s elected in Step 1, Step 2 r etriev es the corresp ondin g m aximal (∆ x, ∆ α ) for eac h image. W e can rewr ite Algorithm 2 by defin ing R m ( x, α ) = h U m , B x,s,α i . Then instead of up d ating the residu al image U m in Step 2, we can u p date the r esp onses R m ( x, α ). Algorithm 2.1 (Matc hing pur suit with lo cal max- im um p o oling). 0. I n itialize i ← 0. F or m = 1 , . . . , M , initalize R m ( x, α ) ← h I m , B x,s,α i for all ( x, α ). 1. i ← i + 1. Select ( x i , α i ) = arg max x,α M X m =1 max (∆ x, ∆ α ) ∈ A ( α ) | R m ( x + ∆ x , α + ∆ α ) | 2 . 2. F or m = 1 , . . . , M , retriev e (∆ x m,i , ∆ α m,i ) = arg max (∆ x, ∆ α ) ∈ A ( α i ) | R m ( x i + ∆ x, α i + ∆ α ) | 2 . Let c m,i ← R m ( x i + ∆ x m,i , α i + ∆ α m,i ), and up date R m ( x, α ) ← R m ( x, α ) − c m,i h B x,s,α , B x i +∆ x m,i ,s,α i +∆ α m,i i . 3. S top if i = n , else go bac k to 1. 2.6 Shared Sk etch Algo rithm Finally , we come to the sh ared sk etc h algorithm that we actually used in the exp eriments in this p a- p er. T h e algorithm inv olv es tw o mo difications to Al- gorithm 2.1 . LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 9 Algorithm 3 (Shared sk etc h alg orithm). 0. I n itialize i ← 0 . F or m = 1 , . . . , M , initialize R m ( x, α ) ← h I m , B x,s,α i for all ( x, α ). 1. i ← i + 1. Select ( x i , α i ) = arg max x,α M X m =1 max (∆ x, ∆ α ) ∈ A ( α ) h ( | R m ( x + ∆ x , α + ∆ α ) | 2 ) . 2. F or m = 1 , . . . , M , retriev e (∆ x m,i , ∆ α m,i ) = arg max (∆ x, ∆ α ) ∈ A ( α i ) | R m ( x i + ∆ x, α i + ∆ α ) | 2 . Let c m,i ← R m ( x i + ∆ x m,i , α i + ∆ α m,i ), and up date R m ( x, α ) ← 0 if corr( B x,s,α , B x i +∆ x m,i ,s,α i +∆ α m,i ) > 0 . 3. S top if i = n , else go bac k to 1. The t wo mod ifi cations are as f ollo ws: (1) In S tep 1, w e c hange | R m ( x + ∆ x, α + ∆ α ) | 2 to h ( | R m ( x + ∆ x, α + ∆ α ) | 2 ) w here h ( · ) is a sigmoid function, which increases from 0 to a saturation lev el ξ (default: ξ = 6), h ( r ) = ξ 2 1 + e − 2 r/ξ − 1 . (5) In tuitiv ely , P M m =1 max (∆ x, ∆ α ) ∈ A ( α ) h ( | R m ( x + ∆ x, α + ∆ α ) | 2 ) can b e considered th e sum of the vo tes from all th e image s for the location and orien tation ( x, α ), where eac h image con tr ibutes max (∆ x, ∆ α ) ∈ A ( α ) h ( | R m ( x + ∆ x, α + ∆ α ) | 2 ). Th e sigmoid transform a- tion p rev en ts a sm all n umb er of images from con- tributing ve ry large v alues. As a result, the s electio n of ( x, α ) is a more “democratic” c hoice than in Al- gorithm 2 , and the select ed ele ment seeks to sk etc h as many edges in the training images as p ossible. In the next section w e shall form ally ju stify the use of sigmoid transformation b y a statistical mod el. (2) In Step 2, w e up date R m ( x, α ) ← 0 if B x,s,α is not orthogonal to B x i +∆ x m,i ,s,α i +∆ α m,i . That is, w e enf orce the orthogonalit y of th e basis B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) for eac h training image m . Our exp erience with matc hing purs uit is that it usually select s el ement s that hav e little o v er- lap with eac h other. So for computational con ve - nience, w e simply enforce that the selected elemen ts are orthogonal to eac h other. F or t wo Gabor w a v elets B 1 and B 2 , we define their correlation as corr( B 1 , B 2 ) = P 1 η 1 =0 P 1 η 2 =0 h B 1 ,η 1 , B 2 ,η 2 i 2 , that is, the su m of squared inner pro d ucts b etw een the sine and co- sine comp onents of B 1 and B 2 . In p ractical imple- men tation, we allo w small correlations b et we en se- lected element s, that is, w e up date R m ( x, α ) ← 0 if corr( B x,s,α , B x i +∆ x m,i ,s,α i +∆ α m,i ) > ε (the d efault v alue of ε = 0 . 1). 2.7 Stat istical Mo deling of Images In this subsection we dev elop a statistical mo del for I m . A s tatistical mo del is not only imp ortant for justifying Algorithm 3 for learning the activ e ba- sis template, it also enables us to use the learned template to recognize the o b j ects in testing images, b ecause we can use the log-lik eliho o d to score the matc h in g b et ween the learned template and the im- age data. The statistical mo d el is based on the decomp osi- tion I m = P m i =1 c m,i B x i +∆ x m,i ,s,α i +∆ α m,i + U m , wh ere B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) is orthog- onal, and c m,i = h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i , so U m liv es in the subspace th at is orth ogonal to B m . In order to sp ecify a s tatistical mo del for I m giv en B m , w e o nly need to sp ecify the d istribution o f ( c m,i , i = 1 , . . . , n ) and the conditional distr ibution of U m giv en ( c m,i , i = 1 , . . . , n ). The least squ ares criterion ( 4 ) that drive s Algo- rithm 2 imp licitly assumes that U m is white noise, and c m,i follo ws a flat prior distribution. These as- sumptions are wrong. There can b e occasional strong edges in t he bac kground, b ut a white n oise U m can- not accoun t for strong edges. Th e distribution of c m,i should b e estimated from the training images, instead of b eing assumed to be a flat distribution. In this w ork we c ho ose to estimate the distribu- tion of c m,i from the trainin g images by fitting an exp onentia l family mo d el to the sample { c m,i , m = 1 , . . . , M } obtained from the trainin g images, and we assume that the conditional distribu tion of U m giv en ( c m,i , i = 1 , . . . , n ) is the same as th e corresp onding conditional distrib ution in the natural imag es. Suc h a cond itional distrib ution can accoun t for o ccasional strong edges in the backg round , and it is the use of suc h a conditional distribution of U m as w ell as the exp onentia l family mo del for c m,i that leads to the sigmoid transformation in Algorithm 3 . Intuitiv ely , a large resp onse | R m ( x + ∆ x, α + ∆ α ) | 2 indicates that there can b e an edge at ( x + ∆ x, α + ∆ α ). Because 10 SI, GON G, ZH U A N D WU an edge can also b e accoun ted f or by the distr ibu- tion of U m in th e natur al images, a large resp onse should not b e tak en at its face v alue for selecting the basis element s. Instead, it should b e discoun ted b y a transformation suc h as h ( · ) in Algorithm 3 . 2.8 Densit y Substitution and Projection Pursuit More s p ecifically , we adopt the dens ity sub stitu- tion sc h eme of pro jection pursuit [ 10 ] to constru ct a statistica l mod el. W e start f r om a referen ce distribu - tion q ( I ). In this article w e assume that q ( I ) is the distribution of all the natural images. W e d o not need to kno w q ( I ) explicitly b eyo nd the marginal distribution q ( c ) of c = h I , B x,s,α i un der q ( I ) . Be- cause q ( I ) is stationary and isotropic, q ( c ) is the same for differen t ( x, α ). q ( c ) is a hea vy tailed dis- tribution b ecause there are edges in the natural im - ages. q ( c ) can b e estimated from the natural images b y p o oling a h istogram of {h I , B x,s,α i , ∀ I , ∀ ( x, α ) } where { I } is a sample of the nat ural images. Giv en B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) , we mo dify the r eferen ce d istribution q ( I m ) to a n ew distribution p ( I m ) b y c hanging the d istributions of c m,i . Let p i ( c ) b e the distribution of c m,i p o oled from { c m,i , m = 1 , . . . , M } , wh ic h are obtained from the training images { I m , m = 1 , . . . , M } . Th en we c h ange the distribu tion of c m,i from q ( c ) to p i ( c ), for eac h i = 1 , . . . , n , while ke eping the conditional dis- tribution of U m giv en ( c m,i , i = 1 , . . . , n ) unc hanged. This leads us to p ( I m | B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n )) (6) = q ( I m ) n Y i =1 p i ( c m,i ) q ( c m,i ) , where w e assume that ( c m,i , i = 1 , . . . , n ) are inde- p end ent u nder b oth q ( I m ) and p ( I m | B m ), for or- thogonal B m . T he conditional distribu tions of U m giv en ( c m,i , i = 1 , . . . , n ) u nder p ( I m | B m ) and q ( I m ) are canceled out in p ( I m | B m ) /q ( I m ) b ecause they are the same. The Jacobians are also the same and are cancel ed out. So p ( I m | B m ) /q ( I m ) = Q n i =1 p i ( c m,i ) / q ( c m,i ). The follo wing are three p ersp ectiv es to view m o d- el ( 6 ): (1) Classification: w e may co nsider q ( I ) as repre- sen ting the negativ e examples, and { I m } are p osi- tiv e examples. W e w an t to fin d the basis element s ( B x i ,s,α i , i = 1 , . . . , n ) so that the pro jections c m,i = h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i for i = 1 , . . . , n distinguish the p ositiv e examples from the n egativ e examples. (2) Hyp othesis testing: w e ma y consider q ( I ) as represent ing the n ull h yp othesis, and the observed histograms of c m,i , i = 1 , . . . , n are the test statistics that are used to r eject the n u ll h yp othesis. (3) Co ding: we c h o ose to cod e c m,i b y p i ( c ) in- stead of q ( c ), while con tinuing to co de U m b y the conditional d istr ibution of U m giv en ( c m,i , i = 1 , . . . , n ) under q ( I ). F or all the three p ersp ectiv es, we need to c ho ose B x i ,s,α i so that there is big con tr ast b et w een p i ( c ) and q ( c ). Th e shared sk etc h pro cess can b e con- sidered as sequenti ally flipping dimensions of q ( I m ) from q ( c ) to p i ( c ) to fit the observed images. It is es- sen tially a pr o jection p ursuit pro cedure, with an ad- ditional lo cal maximization step for estimating the activitie s of the basis e lemen ts. 2.9 Exp onential Tilting and Sa turation T ransformation While p i ( c ) can b e estimated from { c m,i , m = 1 , . . . , M } by p o oling a histogram, w e c ho ose to parametrize p i ( c ) with a single parameter so th at it can b e esti- mated from ev en a single image. W e assume p i ( c ) to b e the follo w in g exp on ential family mo del: p ( c ; λ ) = 1 Z ( λ ) exp { λh ( r ) } q ( c ) , (7) where λ > 0 is the p arameter. F or c = ( c 0 , c 1 ), r = | c | 2 = c 2 0 + c 2 1 , Z ( λ ) = Z exp { λh ( r ) } q ( c ) dc = E q [exp { λh ( r ) } ] is the normalizing constant . h ( r ) is a monotone in- creasing fun ction. W e assume p i ( c ) = p ( c ; λ i ), whic h accounts for the fact that th e squ ared re- sp onses {| c m,i | 2 = |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 , m = 1 , . . . , M } in the p ositiv e examples are in general larger than those in the natural images, b ecause B x i +∆ x m,i ,s,α i +∆ α m,i tends to sk etc h a lo cal edge seg- men t in eac h I m . As men tioned b efore, q ( c ) is es- timated by p o oling a histogram from the natural images. W e argue that h ( r ) should b e a saturation trans- formation in the sense that as r → ∞ , h ( r ) approac hes a fi nite n umber. The s igmoid tr ansformation in ( 5 ) is suc h a tr an s formation. The reason for suc h a trans- formation is as follo ws. Let q ( r ) b e the distribution of r = | c | 2 = |h I , B i| 2 under q ( c ) where I ∼ q ( I ) . W e ma y imp licitly mo d el q ( r ) as a mixtu re of p on ( r ) and LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 11 p off ( r ), wh er e p on is t he distribution of r wh en B is on an ed ge in I , and p off is the distribu tion of r w hen B is not on an e dge in I . p on ( r ) has a muc h hea vier tail than p off ( r ). Let q ( r ) = (1 − ρ 0 ) p off ( r ) + ρ 0 p on ( r ), where ρ 0 is the prop ortion of edges in the natu- ral images. Similarly , let p i ( r ) b e th e d istribution of r = | c | 2 under p i ( c ). W e can mo del p i ( r ) = (1 − ρ i ) p off ( r ) + ρ i p on ( r ), where ρ i > ρ 0 , th at is, the p r o- p ortion of edges sketc hed by the s elected basis ele- men t is higher than the prop ortion of edges in the natural images. Then, as r → ∞ , p i ( r ) /q ( r ) → ρ i /ρ 0 , whic h is a constan t. T herefore, h ( r ) sh ou ld saturate as r → ∞ . 2.10 Maximum Lik eliho o d Lea rning and Pursuit Index No w w e can justify the sh ared ske tc h algorithm as a greedy sc heme for maximizing the log-lik eliho o d. With p arametrization ( 7 ) for the statistical mo del ( 6 ), the log -lik eliho o d is M X m =1 n X i =1 log p i ( c m,i ) q ( c m,i ) = n X i =1 " λ i M X m =1 h ( |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ) (8) − M log Z ( λ i ) # . W e wa nt to estimate the lo cations and orienta tions of the elemen ts of th e activ e basis, ( x i , α i , i = 1 , . . . , n ), the activitie s of these element s, (∆ x m,i , ∆ α m,i , i = 1 , . . . , n ), and the w eigh ts, ( λ i , i = 1 , . . . , n ) , b y max- imizing the log-lik eliho o d ( 8 ), sub ject to the con- strain ts that B m = ( B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) is orthogonal for ea c h m . First, we consider the p roblem of estimating the w eigh t λ i giv en B m . T o maximize the log -lik eliho o d ( 8 ) o ver λ i , w e only need to maximize l i ( λ i ) = λ i M X m =1 h ( |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ) − M log Z ( λ i ) . By setting l ′ i ( λ i ) = 0, w e get the well -kno wn form of the estimating equation for the exp onen tial family mo del, µ ( λ i ) (9) = 1 M M X m =1 h ( |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ) , where the mean parameter µ ( λ ) of the exp onen tial family mo del is µ ( λ ) = E λ [ h ( r )] (10) = 1 Z ( λ ) Z h ( r ) exp { λh ( r ) } q ( r ) dr . The estimating equation ( 9 ) can b e solv ed easily b e- cause µ ( λ ) is a one-dimensional fu nction. W e can simply store this monotone fu nction ov er a one-dimen- sional grid. Then w e solv e this equ ation by lo oking up the stored v alues, with the help of nearest n eigh- b or lin ear interp olation for the v alues b etw een the grid p oin ts. F or eac h grid p oin t of λ , µ ( λ ) can b e computed by one-dimensional integ ration as in ( 10 ). Thanks to the indep endence assumption, w e only need to deal with suc h one-dimensional fu nctions, whic h reliev es u s f rom time consuming MCMC com- putations. Next let us consider the problem of selecting ( x i , α i ), and estima ting th e activit y (∆ x m,i , ∆ α m,i ) for eac h image I m . Let ˆ λ i b e the s olution to th e estimat- ing equation ( 9 ). l i ( ˆ λ i ) is monotone in P M m =1 h ( |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ). Therefore, we need to find ( x i , α i ), and (∆ x m,i , ∆ α m,i ), b y maximizing P M m =1 h ( |h I m , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ). This justifies Step 1 of Algorithm 3 , where P M m =1 h ( | R m ( x + ∆ x, α + ∆ α ) | 2 ) serv es as the pursuit index. 2.11 SUM-MAX Maps fo r T emplate Matching After learning the activ e basis mo del, in partic- ular, the b asis elemen ts B = ( B x i ,s,α i , i = 1 , . . . , n ) and the weigh ts ( λ i , i = 1 , . . . , n ) , we can use the learned mo del to find the ob ject in a testing im- age I , as illustrated b y Figure 4 . The testing im- age may not b e defined on the same lattice as the training images. F or example, the testing image may b e la rger than the training images. W e a ssum e that there is one ob ject in the testing image , bu t we do not kn o w the lo cation of th e ob ject in the testing image. In order to detect the ob ject, we scan the template ov er the testing image, and at eac h lo ca- tion x , we can deform the template an d matc h it to the image patc h aroun d x . T h is giv es us a log- lik eliho o d score at eac h lo cation x . T hen we can fi nd the maxim um likeli ho o d lo cation ˆ x that ac hiev es the maxim um of the log-lik eliho o d score among all the x . After computing ˆ x , w e can then retriev e th e ac- tivities of the elemen ts of the acti ve b asis template cen tered at ˆ x . 12 SI, GON G, ZH U A N D WU Algorithm 4 (Ob ject detection by template matc h in g). 1. F or ev ery x , compute l ( x ) = n X i =1 h λ i max (∆ x, ∆ α ) ∈ A ( α i ) h ( |h I , B x + x i +∆ x,s,α i +∆ α i| 2 ) − log Z ( λ i ) i . 2. S elect ˆ x = arg max x l ( x ) . F or i = 1 , . . . , n , re- triev e (∆ x i , ∆ α i ) = arg max (∆ x, ∆ α ) ∈ A ( α i ) |h I , B ˆ x + x i +∆ x,s,α i +∆ α i| 2 . 3. Retur n the lo cation ˆ x , and the deformed tem- plate ( B ˆ x + x i +∆ x i ,s,α i +∆ α i , i = 1 , . . . , n ) . Figure 4 displa ys the deformed template ( B ˆ x + x i +∆ x i ,s,α i +∆ α i , i = 1 , . . . , n ), whic h is sup erp o- sed on the imag e on the righ t. Step 1 of the abov e algorithm can b e realized b y a computational arc h itecture called sum-max maps. Algorithm 4.1 (sum-max maps). 1. F or all ( x, α ), compute SUM1( x, α ) = h ( |h I , B x,s,α i| 2 ). 2. F or all ( x, α ) , compute MAX1( x, α ) = max (∆ x, ∆ α ) ∈ A ( α ) SUM1( x + ∆ x, α + ∆ α ) . 3. F or all x , compute SUM2( x ) = P n i =1 [ λ i × MAX1( x + x i , α i ) − log Z ( λ i )]. SUM2( x ) is l ( x ) in Algorithm 4 . The lo cal maximization op eration in Step 2 of Al- gorithm 4.1 has b een hyp othesized as the fu n ction of the complex cells of the pr im ary visual cortex [ 17 ]. In the conte xt of the activ e basis mo d el, this op eration can b e justified as the maxim um likeli - ho o d estimation of th e activitie s. The shared ske tc h learning algorithm can also b e written in terms of sum-max maps. The activiti es (∆ x m,i , ∆ α m,i , i = 1 , . . . , n ) s h ould b e treated as laten t v ariables in the activ e basis mo del. Ho wev er, in b oth learning and inference al- gorithms, w e treat them as unkno wn parameters, and we maximize ov er them instead of integ rating them out. Acco rdin g to Little and Rubin [ 12 ], m ax- imizing the complete-data likeli ho o d ov er the laten t v ariables ma y not lead to v alid in ference i n general. Ho wev er, in natural images, there is little noise, and the uncertain ty in the activi ties is often very s m all. So maximizing o v er the laten t v ariables can b e con- sidered a go o d approximat ion to in tegrating out th e laten t v ariables. 3. LEARNING A CTIVE BASIS TEMPLA TES BY EM-TYPE AL GORITHMS The shared sk etc h algorithm in the previous s ec- tion requires that the ob jects in the trai ning images { I m } are of the same p ose, at the same location and scale, and the lattice of I m is the b ound ing b o x of the ob ject in I m . It is often the case that the ob j ects ma y app ear at different unkn o wn lo cations, orienta- tions and scales in { I m } . The unkn o wn lo cations, orien tations and sca les ca n b e incorp orated into the image generation pr o cess as hidden v ariables. The template can still b e learned by the maxim um like- liho o d metho d. 3.1 Learning with Unkno wn Orientations W e start from a simple example of learning a horse template at the sid e view, w h ere the hors es can face either to the left or to the r ight. Figure 5 displa ys the results of EM learning. Th e three templates in the first ro w are the lea rned templates in the first three iterations of the E M algo rithm. T he r est of the figure displa ys the training images, and for eac h trainin g image, a deformed template is display ed to the righ t of it. The EM algorithm correctly estimat es the di- rection for eac h horse, as can b e s een by h o w the algorithm flips the template to sk etc h eac h training image. Let B = ( B i = B x i ,s,α i , i = 1 , . . . , n ) b e the deformable template o f the horse, and B m = ( B m,i = B x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) b e the d e- formed template for I m . T hen I m can either b e gen- erated by B m or the mirror reflection of B m , that is, ( B R ( x i +∆ x m,i ) ,s, − ( α i +∆ α m,i ) , i = 1 , . . . , n ), where for x = ( x 1 , x 2 ), R ( x ) = ( − x 1 , x 2 ) (we assume that the template is cen tered at origin). W e ca n introd uce a hidden v ariable z m to accoun t for this un certain ty , so that z m = 1 if I m is generated b y B m , and z m = 0 if I m is generate d b y the mirror reflection of B m . More f ormally , w e c an define B m ( z m ), so that B m (1) = B m , and B m (0) is the mirr or reflection of B m . Then we ca n assume the follo wing mixture mo del: z m ∼ Bernoulli( ρ ), where ρ is the pr ior pr ob - abilit y th at z m = 1, and [ I m | z m ] ∼ p ( I m | B m ( z m ) , Λ), LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 13 where Λ = ( λ i , i = 1 , . . . , n ) . W e need to learn B , and estimate Λ and ρ . A simple observ ation is that p ( I m | B m ( z m )) = p ( I m ( z m ) | B m ), where I m (1) = I m and I m (0) is the mirror reflection of I m . In other w ords, in the case of z m = 1 , we do not need to make an y change to I m or B m . I n the case of z m = 0 , we can either flip the template or flip the i mage, and these t w o alter- nativ es will pro du ce the same v alue for the lik eho o d function. In the EM algorithm, the E -step imp u tes z m for m = 1 , . . . , M using the current template B . This means recognizing the orien tation of the ob ject in I m . Giv en z m , we can c hange I m to I m ( z m ), so that { I m ( z m ) } b ecome aligned with eac h other, if z m are imputed correctly . Th en in the M-step, w e can learn the temp late from the aligned images { I m ( z m ) } b y the shared sk etc h algo rithm. The complete data log -lik eliho o d for the m th ob- serv ation is log p ( I m , z m | B m ) = z m log p ( I m | B m , Λ) + (1 − z m ) log p ( I m (0) | B m , Λ) + z m log ρ + (1 − z m ) log(1 − ρ ) , Fig. 5. T emplate le arne d fr om images of hors es facing two differ ent dir e ctions. The first r ow displays t he template s le arne d in the first 3 iter ations of the EM algorithm. F or e ach tr aining i mage, the deforme d template is plotte d to the right of it. The numb er of tr aining images i s 57. The image size is 120 × 100 (width × height). The numb er of elements is 40. The numb er of EM iter ations is 3. 14 SI, GON G, ZH U A N D WU whic h is linear in z m . S o in the E-step, we only n eed to compute the predictiv e exp ectation of z m , ˆ z m = Pr ( z m = 1 | B m , Λ , ρ ) = ρp ( I m | B m , Λ) ρp ( I m | B m , Λ) + (1 − ρ ) p ( I m (0) | B m , Λ) . Both log p ( I m | B m , Λ) and log p ( I m (0) | B m , Λ) are readily a v ailable in the M-step. The M-ste p seeks to maximize the exp ectation of the complete -data log -lik eliho o d, n X i =1 " λ i M X m =1 ( ˆ z m h ( |h I m , B m,i i| 2 ) + (1 − ˆ z m ) h ( |h I m (0) , B m,i i| 2 )) (11) − M log Z ( λ i ) # + " log ρ M X m =1 ˆ z m (12) + log(1 − ρ ) M − M X m =1 ˆ z m !# . The m aximizatio n of ( 12 ) leads to ˆ ρ = P M m =1 ˆ z m / M . The maximization of ( 11 ) can b e accomplished by the s hared s ketc h alg orithm, that is, Algorithm 3 , with the follo wing minor mo d ifications: (1) The training images b ecome { I m , I m (0) , m = 1 , . . . , M } , that is, t here are 2 M training im ages in- stead of M images. Eac h I m con tributes t wo copies, the original copy I m or I m (1), and the m ir ror reflec- tion I m (0). T his r eflects the uncertain ty in z m . F or eac h image I m , w e attac h a w eight ˆ z m to I m , and a w eigh t 1 − ˆ z m to I m (0). I n tuitiv ely , a fraction of the horse in I m is at the same orien tation as the cur- ren t template, and a fraction of it is at the opp osite orien tation—a “Schro dinger h orse” so to sp eak. W e use ( J k , w k , k = 1 , . . . , 2 M ) to represent these 2 M images and their w eights. (2) In Step 1 of the shared ske tc h algorithm, we select ( x i , α i ) by ( x i , α i ) = arg max x,α 2 M X k =1 w k max (∆ x, ∆ α ) ∈ A ( α ) h ( | R k ( x + ∆ x, α + ∆ α ) | 2 ) . (3) Th e maxim um like liho o d estimating equation for λ i is µ ( λ i ) = 1 M 2 M X k =1 w k max (∆ x, ∆ α ) ∈ A ( α i ) h ( | R k ( x i + ∆ x, α i + ∆ α ) | 2 ) , where the r igh t-hand side is the w eigh ted av erage obtained from the 2 M training images. (4) Along with th e selection of B x i ,s,α i and the estimation of λ i , we sh ould calculate the template matc h in g scores log p ( J k | B k , Λ) = n X i =1 h ˆ λ i max (∆ x, ∆ α ) ∈ A ( α i ) h ( | R k ( x i + ∆ x, α i + ∆ α ) | 2 ) − log Z ( ˆ λ i ) i , for k = 1 , . . . , 2 M . This giv es u s log p ( I m | B m , Λ) and log p ( I m (0) | B m , Λ), whic h can then b e used in the E-step. W e in itialize th e algorithm by randomly generat- ing ˆ z m ∼ Unif [0 , 1], and then iterate b etw een the M- step and the E-step. W e stop the algorithm after a few iterations. Th en we estimate z m = 1 if ˆ z m > 1 / 2 and z m = 0 otherwise. In Figure 5 the results are obtained after 3 iter- ations of the EM algorithm. In itially , the learned template is quite symmetric, reflecting th e confu- sion of the algorithm r egarding the directions o f the horses. Th en the EM alg orithm b egins a p ro cess of “symmetry breaking” or “p olarization.” Th e sligh t asymmetry in the initial template will p ush th e algo- rithm to ward fa voring for eac h image the direction that is consisten t with the ma jority dir ection. This pro cess qu ickly leads to all the images aligned to one common direction. Figure 6 shows another example where a template of a pigeon is learned from examples with mixed directions. W e can also learn a common template w hen the ob jects are at m ore than t wo different orientati ons in the training images. The algorithm is essenti ally the same as d escrib ed ab o v e. Figure 7 displa y s th e learning of the template of a baseball cap from ex- amples wh ere the caps tur n to different orien tations. LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 15 Fig. 6. T emplate le arne d fr om 11 images of pige ons facing differ ent dir e ctions. The i mage size is 150 × 150 . The num b er of elements is 50. T he numb er of iter ations is 3. The E-step in volv es r otating the image s by matc h- ing to the curren t template, and the M-step learns the template from the rota ted images. 3.2 Learning F rom Nonaligned Images When the ob jects app ear at different locations in the training images, we need to infer the unknown lo cations wh ile learning the template . Figure 8 dis- pla ys the template of a bike learned fr om the 7 train- ing i mages where t he ob jects app ear at differen t lo- cations and are not aligned. It also displa ys the de- formed templates sup erp osed on the ob jects in the training images. In order to incorp orate the unkn o wn lo cations into the image generation p ro cess, let u s assume that b oth the learned template B = ( B x i ,s,α i , i = 1 , . . . , n ) and the training im ages { I m } are cente red at origin. Then let us assume that th e location of the ob ject in image I m is x ( m ) , which is assumed to b e u ni- formly distribu ted within the imag e latti ce of I m . Let u s defin e B m ( x ( m ) ) = ( B x ( m ) + x i +∆ x m,i ,s,α i +∆ α m,i , i = 1 , . . . , n ) to b e the deformed template obtained b y translating the template B from the origin to x ( m ) and then deforming it. T hen the generativ e mo del for I m is p ( I m | B m ( x ( m ) ) , Λ). Just lik e the example of learning the h orse tem- plate, w e can transfer the trans f ormation of the tem- plate to the trans formation of the image data, and the latter transformation leads to the alignmen t of the images. L et us define I m ( x ( m ) ) to b e the image obtained by translating the image I m so th at the cen ter of I m ( x ( m ) ) is − x ( m ) . Th en p ( I m | B m ( x ( m ) ) , Λ) = p ( I m ( x ( m ) ) | B m , Λ). If w e kno w x ( m ) for m = 1 , . . . , M , then the images { I m ( x ( m ) ) } are all aligned, so th at w e ca n learn a template from these alig ned images by the sh ared s k etc h algorithm. On the other hand, if w e kno w the template, w e ca n use the tem- plate to recognize and locate the ob ject in eac h I m b y the inference algorithm, that is, Algorithm 4 , us- ing the sum-max maps, and identify x ( m ) . Suc h con- siderations naturally lead to the iterativ e EM-t yp e sc heme. The complete-data log-li ke liho o d is n X i =1 " λ i M X m =1 h ( |h I m ( x ( m ) ) , B x i +∆ x m,i ,s,α i +∆ α m,i i| 2 ) (13) − M log Z ( λ i ) # . In the E-step we p erform the reco gnition task b y calculating p m ( x ) = Pr( x ( m ) = x | B , Λ) ∝ p ( I m ( x ) | B m , Λ) , ∀ x. Fig. 7. T empl ate le arne d fr om 15 images of b aseb al l c aps facing di ffer ent orientations. The image size is 100 × 100 . The numb er of element s is 40. The numb er of i ter ations i s 5. 16 SI, GON G, ZH U A N D WU Fig. 8. The first r ow shows the se quenc e of templates le arne d in the first 3 i ter ations. The first one is the starting template, which i s le arne d fr om the first tr aining i mage. The se c ond r ow shows the bikes dete cte d by the le arne d template, wher e a deforme d template is sup erp ose d on e ach tr aining image. The size of the template is 225 × 169 . The numb er of elements is 50. The numb er of iter ations is 3. That is, w e scan the template o v er the whole image I m , and at eac h lo cation x , we ev aluate the template matc h in g b et ween the image I m and the translated and deformed template B m ( x ). log p ( I m ( x ) | B m , Λ) is the SUM2( x ) output b y the sum-max maps in Algorithm 4.1 . Th is giv es us p m ( x ), w hic h is the p osterior or predictiv e distribution of th e u nkno wn lo cation x ( m ) within th e image lattice of I m . W e can then use p m ( x ) to compu te the exp ectatio n of the complete-data log-lik eliho o d ( 13 ) in the E-step. Our exp erience suggests that p m ( x ) is alwa ys high- ly p eak ed at a particular p osition. So instead of computing the a ve rage of ( 13 ), w e simply impute x ( m ) = arg max x p m ( x ). Then in the M-step, w e maximize the complete data log-lik eliho o d ( 13 ) b y the s hared sk etc h algorithm, that is, w e learn the template B from { I m ( x ( m ) ) } . Th is step p erform s sup ervised learning from the ali gned images. In our cu rrent exp erimen t we initialize the algo- rithm b y learning ( B , Λ) from the fi rst image. In learning from this single image, we set b 1 = b 2 = 0, that is, w e d o not allo w the elemen ts ( B x i ,s,α i , i = 1 , . . . , n ) to p erturb . After that, we reset b 1 and b 2 to their d efault v alues, and iterate the recognitio n step and the sup ervised lea rning step. In addition to the un kno wn lo cations, we also al- lo w the uncertain t y in scales. In the recognition step, for eac h I m , we searc h o ve r a num b er of different resolutions of I m . W e take I m ( x ( m ) ) to b e the opti- mal r esolution that conta ins the maxim um template matc h in g score across all the resolutio ns. In Figure 8 the first r o w displa ys the template s learned o v er the EM iterations. Th e fi r st template is learned f rom the first training image. Figures 9 – 12 displa y more examples. 4. DISCUSSION This pap er exp eriments with EM-t yp e algorithms for learning activ e basis mo dels from training images where the ob jects ma y app ear at u nkno wn lo cations, orien tations and scales. F or more details on imple- men ting th e shared sketc h algorithm, th e reader is referred to [ 23 ] and the source co de p osted on th e repro du cibilit y page. W e would lik e to emphasize t w o asp ects of the algorithms that are d ifferen t from the usual EM al- gorithm. The first asp ect is that the M-step inv olv es the selection of the basis elemen ts, in addition to th e estimation of the asso ciated p arameters. T h e second asp ect is that the p er f ormance of the algorithms can r ely h ea vily on the initializations. In learnin g from nonaligned images, the algorithm is initia lized b y tr ainin g th e activ e basis mo del on a single im - age. Because of the simplicit y of the m o del, it is p ossible to learn the mo del from a single image. In addition, the learnin g algorithm seems to con v erge within a few iterat ions. 4.1 Limitations The activ e basis mo del is a simp le extension of the w a v elet r epresen tation. It is still v ery limited in the follo wing asp ects. The mo del cannot account for large deformations, articulate shap es, big c h an ges in p oses an d view p oin ts, and occlusions. The cu rrent form of the mo del do es not describ e textures and ligh ting v ariations either. The curren t version of the learning algorithm only deal with situations where there is one ob ject in eac h image. Also, w e ha v e tuned tw o parameters in our implemen tation. One is the image resize factor that we apply to th e trainin g images b efore the mo del is learned. Of course, f or eac h exp eriment, a single r esize factor is applied to all the training images. The other p arameter is the n umb er of elemen ts in t he activ e basis. LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 17 Fig. 9. The first r ow shows the se quenc e of templates le arne d in iter ations 0, 1, 3, 5. The se c ond and thir d r ows show th e c amel images with sup erp ose d deforme d templates. The s ize of the template i s 192 × 145 . The numb er of element s is 60. The numb er of iter ations i s 5. Fig. 10. The first r ow shows the se quenc e of templates l e arne d in iter ations 0, 1, 3, 5. The other r ows show the cr ane images with sup erp ose d deforme d templates. The size of the template is 285 × 190 . The numb er of elements is 50. The numb er of iter ations is 5. Fig. 11. The first r ow shows the se quenc e of templates le arne d in iter ations 0, 2, 4, 6, 8, 10. The other r ows show the horse images wi th sup erp ose d deforme d templates. We use the first 20 im ages of the Weizmann horse data set [ 3 ], which ar e r esize d to half the original sizes. The size of t he template is 158 × 116. The numb er of elements is 60. The numb er of iter ations i s 10. The dete ction r esults on the r est of the i mages in this data set c an b e found in the r epr o ducibil i ty p age. 18 SI, GON G, ZH U A N D WU Fig. 12. The size of the template is 240 × 180 . The numb er of elements is 60. The numb er of iter ations is 3. 4.2 Pos sible Extensions It is p ossible to extend the activ e basis model to address some o f the ab o ve limitatio ns. W e shall dis- cuss tw o dir ections of extensions. One is to use activ e basis mo dels as parts of the ob jects. The other is to train acti ve basis mo d els b y lo cal learning. A ctive b asis mo dels as p art-templates: T he activ e basis mo del is a co mp osition of a num b er of Ga- b or wa ve let elemen ts. W e can further comp ose mul- tiple activ e b asis mo dels to repr esen t more articu- late shap es or to accoun t for large deformations by allo wing these activ e b asis m o dels to c h ange their o verall lo cations, scales and orien tations within lim- ited r anges. These activ e basis mo dels serve as part- templates of the whole comp osite template. This is essen tially a hierarchica l recursiv e comp ositional structure [ 11 , 25 ]. The inference or template matc h- ing can b e based on a recursiv e structure of sum-max maps. Learning suc h a structure should b e p ossi- ble b y extending the learning algorithms studied in this article. See [ 23 ] for preliminary r esults. See also [ 18 , 20 ] for rece nt w ork on part-based mod els. L o c al le arning of multiple pr ototy p e templates: In eac h exp eriment w e assume that all the training im- ages share a common template. In realit y , the tr ain- ing images ma y con tain different types of ob jects, or d ifferent p oses of the same type of ob jects. It is therefore n ecessary to learn multiple protot yp e templates. It is p ossible to d o so by mod if y in g the current learning a lgorithm. After initia lizing the al- gorithm b y single image training, in the M-step, w e can relearn the template only from the K images with the highest template matc hing scores, that is, w e relearn the template f rom the K nearest neigh- b ors of the cur ren t template. Suc h a sc heme is con- sisten t with the EM-clustering algorithm for fi tting mixture mo dels. W e can start the algorithm from ev ery training image, so that we learn a lo cal pr oto- t yp e template around eac h training image. Then w e can trim and merge these protot yp es. S ee [ 23 ] for preliminary results. REPRODUCIBILITY All the exp erimenta l results r ep orted in this p ap er can b e r epro du ced b y the co de that we hav e p osted at http://www.stat.ucla.edu/ ~ ywu/ActiveBa sis. html . A CKNO WLEDGMENTS W e are grateful to the editor of the sp ecial issue and the tw o review ers f or their v aluable commen ts that ha ve help ed us imp ro v e the presen tation of the pap er. The w ork rep orted in this pap er has b een supp orted b y NSF Grant s DMS-07- 07055, DMS-1 0- 07889 , I IS-07-1365 2, ONR N00014-05 -01-0543, Air F orce Gran t F A 9550- 08-1-048 9 and the Kec k foun- dation. REFERENCES [1] Amit , Y. and Trouve , A. ( 2007). POP: Patc hw ork of parts mo dels for ob ject recognition. I nt. J. Comput. Vision 75 267– 282. [2] Bell , A . and Sej no wski , T. J. (1997). The ‘indepen- dent comp onents’ of n atu ral scenes are ed ge filters. Vision R ese ar ch 37 3327– 3338. [3] Borenstein , E., Sharo n , E. and Ullman , S. (2004). Com bining top-down and b ottom-up segmentation. In IEEE CVPR Workshop on Per c eptual Or ganiza- tion in Computer Vi sion, Washington, DC 4 46. [4] Candes , E. J. and Donoho , D. L. (1999). Curvel ets—a surprisingly effectiv e nonadaptive representation fo r LEARNING ACTIVE BASIS MOD ELS BY EM-TYPE ALGORITHMS 19 ob jects with edges. In Curves and Surfac es (L. L. Sch umaker et al., eds.) 105–120. V anderbilt Un iv . Press, N ashvill e, TN. [5] Chen , S., Donoho , D. and Saunders , M. A. (1999). Atomic decomp osition by basis pursuit. SIAM J. Sci. Comput. 20 33–61. MR1639094 [6] Da ugm an , J. (1985). Uncertaint y relation for resolution in space, spatial frequency , and orientatio n opti- mized b y tw o-d imensional visual cortical filters. J. Opt. So c. A mer. 2 1160–116 9. [7] Dempster , A. P ., Laird , N . M. and Rubin , D. B. (1977). Maxim u m li kelihoo d from i ncomplete data via the EM a lgorithm. J. R oy. Statist . So c. Ser. B 39 1–38. MR0501537 [8] Donoho , D. L., Vetterli , M., DeVore , R. A. and Da ubechi e , I. (1998). Data compression and har- monic analysis. IEEE T r ans. Inf orm. The ory 6 2435–24 76. MR1658775 [9] Fergus , R., Perona , P . an d Zisserman , A. (2003). Ob ject class recognition by unsup ervised scale- inv arian t learning. In Pr o c e e dings of Computer Vi- sion and Pattern R e c o gnition, Madison, WI 2 264– 271. [10] Friedman , J. H. (1987). Ex p loratory p ro jection pursuit. J. Amer. Statist. Asso c. 82 249–266. MR0883353 [11] Geman , S., Potter , D. F. and Ch i , Z. (2002). Comp o- sition systems. Quar tarly Appl. Math. 60 707–736. MR1939008 [12] Little , R. J. A . and Rubin , D. B. (1983). O n jointly estimating parameters and missing data by maxi- mizing th e complete data likelihood . Amer. Statist. 37 218–220. [13] Malla t , S. and Zhang , Z. (1993). Matching pursuit in a time-frequency dictionary . IEEE T r ans. Signal Pr o- c ess. 41 3397– 3415. [14] Meng , X .-L. and va n Dyk , D . (1997). The EM algorithm—an old folk-song sung to a fast new tune. J. R oy. Statist. So c. Ser. B 59 511–567. MR1452025 [15] Olsha usen , B . A . and Fie ld , D. J. (199 6). Emerge nce of simple-cell receptiv e field p rop erties by learning a sparse co de for natural images. Natur e 381 607–609. [16] Rabiner , L. R. (1989). A tutorial on h idden Marko v mod els and selected applications in sp eech recogni- tion. Pr o c. IEEE 77 257–286. [17] Riesenhuber , M. and Poggio , T. (1999). H ierarc hical mod els of ob ject recognition in cortex. Natur e Neu- r oscienc e 2 1019–1025. [18] R oss , D. A. and Zemel , R. S. (2006). Learning parts- based representations of data. J. Mach. L e arn. R es. 7 2369–2397. MR2274443 [19] Simoncelli , E. P ., Freem an , W. T., Adelson , E. H. and Heeger , D. J. (1992). Shiftable multiscale transforms. IEEE T r ans. Inform. T he ory 38 587– 607. MR1162216 [20] Sudder th , E. B., Torralba , A., Freeman , W. T. and Willsky , A. S . (2005). Learnin g hierarc hical mod- els of scenes, ob jects, and parts. Pr o c. Int. Conf. Comput. Vision 2 1331–1338 . [21] Tibshirani , R. (1996). Regressio n shrinkag e and selec- tion v ia the lass o. J. R oy. Stat ist. So c. Ser. B 58 267–288 . MR1379242 [22] Wu , Y. N., Si , Z., Flemi ng , C. and Zhu , S. C. (2007). Deformable temp late as activ e basis. Pr o c. Int. Conf. Comput. Visi on, Rio de Janeir o, Br azil 1–8 . [23] Wu , Y. N., Si , Z., Gong , H. and Zhu , S . C. (2009). Learning active basis model for ob ject d e- tection and recognition. Int. J. Comput. Visi on DOI:10.1007/s 11263-009-0287-0 . [24] Yuille , A . L., Hallinan , P . W. and Cohen , D. S. (1992). F eature extraction from faces u sing de- formable templates. Int. J. Comput. Vi si on 8 99– 111. [25] Zhu , S. C. and Mum fo rd , D. B. (2006). A stochas- tic grammar o f images. F oundations and T r ends in Computer Gr aphi cs and Vision 2 259–36 2.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment