Cooperative searching for stochastic targets
Spatial search problems abound in the real world, from locating hidden nuclear or chemical sources to finding skiers after an avalanche. We exemplify the formalism and solution for spatial searches involving two agents that may or may not choose to s…
Authors: Vadas Gintautas, Aric Hagberg, Luis M. A. Bettencourt
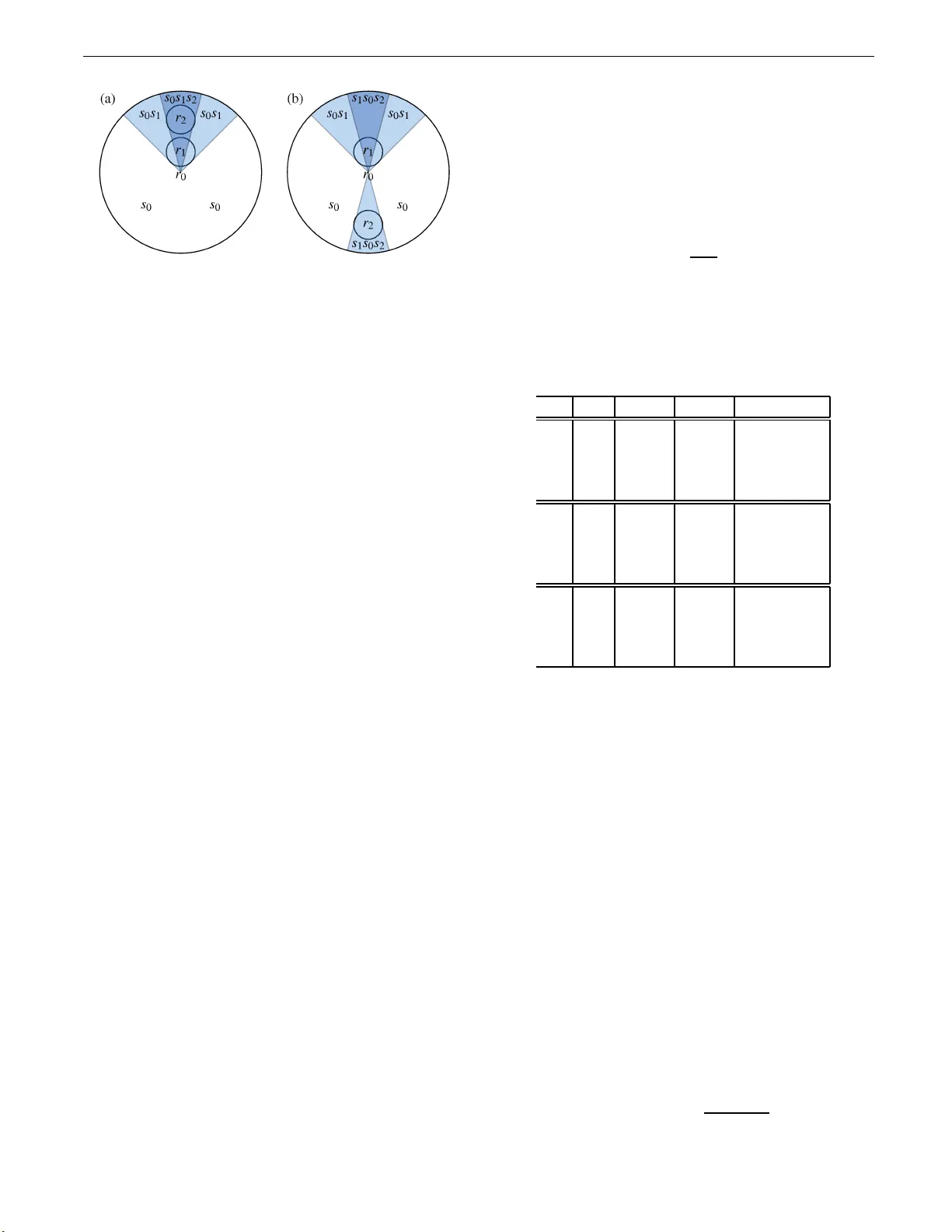
Co op erativ e searc hing for sto c hastic targets V adas Gin tautas, 1, 2 , ∗ Aric Hagberg , 2 and Lu ´ ıs M. A. Bettencour t 2, 3 1 Center for Nonline ar Studies, L os A lamos National L ab or atory, L os A lamos NM 87545, USA 2 Applie d Mathematics and Plasma Physics, The or etic al Division, L os Alamos National L ab or atory, L os Alamos NM 87545, USA † 3 Santa F e Institute, 1399 Hyde Park R o ad, Santa F e NM 87501, USA (Dated: Novem ber 8, 201 8) Spatial search p roblems aboun d in the real worl d, from locating hidden nuclear or chemical sources to finding skiers after an a v alanc he. W e exemplify th e forma lism and solution for spatial searc hes inv olving t w o age nts that ma y or m ay not choose to share information during a searc h. F or certain classes of tasks, sharing information betw een multiple searc hers mak es co op erativ e searc hing adv anta geous. In some examples, agen ts are able to realize synergy by aggregating information and moving based on lo cal judgments ab out maximal informatio n gathering ex p ectations. W e also explore one- and tw o-dimensional simplified situations analyt ically and numerical ly to p ro vide a framew ork for analyzing more complex problems. These general considerations provide a guide for designing optimal algorithms for real-w orld searc h problems. I. INTRO DUCTION In the real w orld, there are man y spatial search prob- lems that inv olve multiple agents or searchers. Co mm u- nication betw een such agents or b e t ween agents and a centralized command cen ter may be s ensitiv e, costly , or difficult for v arious reasons. In this work, we explore spatial search problems in this con text and examine the classes of sea rch problems for whic h communication and co ordination b et ween m ultiple agents will enable qua n- titative adv antages ov er independent information gath- ering. These pro ble ms are very gener al and ca n b e for - malized and solved in terms o f informa tion theory . The solutions are essential to the dev elopment of quantita- tive decisio n supp ort to ols under uncertain ty (e.g. in medicine [9 ]) and fo r automated m ulti-agent searches for sto c hastic infor mation [1], such as those in volving dis- tributed senso r net works [19]. A searc h ma y be thought o f a s a series of steps by which an agent or a gen ts reduce the uncertaint y of the lo cation of a targ e t to zer o . T his lo cation may b e in physical s pa ce or in a “ s pace of p ossibilities,” i.e., a se t of a lternative scenarios . F o r example, if you need to find y our k eys in the morning b efore g oing to work and there ar e five ro oms in your ho use, initia lly you k now your keys m ust be in one o f these ro oms. After thor oughly searching one r oo m and not finding the keys, your uncer tain ty is reduced; the keys must now b e in one of the four remaining ro oms, and so on. If you find the keys in the se cond ro om, then the uncertaint y of their lo cation is immediately zero b ecause you know with complete certaint y that they are in your hand. Now imagine you ha ve a friend help you search. The t wo of you would be searching twice a s fast since , as - ∗ Electronic address: v gintaut as@chat ham.edu † Ph ysics Departmen t, Chatham Univ ersity , Pittsburgh P A 1523 2, USA suming y ou and y our friend share informatio n, a pair of s e archers ca n eliminate ro oms a t a rate t wice as fa s t as that of a single searcher. In more co mplex sea rch problems, the tar get might emit some k ind of compli- cated sig nal that makes it p ossible for multiple co or di- nated se a rchers to dra matically increas e efficiency (imag - ine there ar e o ne thous and ro oms to search but the keys are attached to some kind of radioactive homing be a con or can emit a so und). In these situations, understanding the nature of the c lues and shar ing infor ma tion can b e extraor dinarily b eneficial. A sea rc h whereby agents move ba sed expr essly on in- formation cues r ather than following gra dien ts is known as an infotaxis search. In a 200 7 pap er, V erga ssola et al. explored infotax is in the context of a moth following a pheromone trail thro ugh air to find a mate. The moth was p erforming a spatia l sea rch in turbulent air currents that carried the trail h [18]. Compared to more conv en- tional metho ds s uch as c hemotaxis (following a chemical gradient [7, 14]), infotaxis gives a n adv antage in situ- ations when the signals from the target of the search are uncerta in. This migh t b e the case if signals from the target are sto chastic, difficult to measure, or highly v arying in time. In the cas e of the moth, the signal was sparse and widely dis p ersed by the turbulent air cur rent s. When the moth follo wed the gra dien t of the strength of the trail dir ectly chemotaxis it was forced to take a very circuitous ro ute due to the turbulen t disp ersal of the trail. How ever, when the moth employ ed an info- taxis algorithm to mov e to p ositions where it mig h t gain the mos t information a bout the sour c e o f the tr ail, its per formance improv ed significantly . Since we will con- sider only sear ch pro blems s uc h as these, in the following we will refer to the target of a n infotaxis sea rch as the “source.” The formalism of infota xis balances the com- peting goals of ex ploiting the curr e nt information av ail- able and exploring to gain more infor mation, a familiar compromise from other unsuper vised lea rning metho ds, such as reinfor cemen t learning [17]. While effectiv e path planning a lgorithms may b e based on the o ptimization UNCLASSIFIED (LA-UR 09-0767 6) of so me ob jective function, thes e often rely on exploiting some features o f the known environment [12] r ather than a so lid foundation based on information theor y . Info- taxis provides a framework for studying search problems in gener al and is therefo re broadly applicable. In this article, w e explo re conditions in which co op er- ation b et ween multiple infotaxis agents is adv antageous. W e fo cus o n ex a mples in which ag en ts are able to r e- alize synergetic co op eration by a ggregating infor mation and moving ba sed on a lo cal infota x is algo rithm. Syn- er gy , and its opp osite, r e dundancy , ar e infor mation the- oretic quantities that a r e defined in terms o f relative probabilities o f the sto c hastic v ariables inv olved [4]. In a recent pap er, w e show ed that spatiotemp oral corre la- tions are nece ssary for synergy [11]. When sy nergy is exploited e ffectiv ely it can le a d to an exp onen tial re- duction in the search effort, in terms of time, ener gy , or n um b er of steps [8, 10, 16]. Here w e use a simple one-dimensional search example and a mor e rea listic tw o- dimensional ge neralization to show how correlatio ns lead to sy ne r gy . These simple exa mples provide a fr amew ork for a nalyzing more complex problems. Since, in gener al, the computational c ost is greater for sea rchers to com- m unicate and p erform co ordinated movemen ts instead of moving based on indep endent decisio ns, w e will describ e situations in whic h co or dina tion is w orthwhile. II. INFO RMA T ION THEOR Y APPR OA CH TO STOCHASTIC SEAR CH Effective and robust search metho ds for lo cating sto c hastic sour c es balance the comp eting str ategies of exploratio n and exploitatio n [17]. Giv en a current esti- mated pr obabilit y distribution for the lo cation o f a so urce a searcher might either exploit the da ta a lready c o llected by moving towards the lo cation that maximizes this like- liho od or shar pen the distribution (reduce uncertaint y further) by moving to gather mo r e div erse data. The in- fotaxis search balances these tw o s trategies by optimiz- ing the exp ected information gain over the p ossible next search mov es. In the following w e review some basic con- cepts from information theor y a nd formalize the infotax is algorithm in terms of these quan tities. A. Information, synergy , and redundancy T o determine whether sear c hers can be effectively co- ordinated we define define synerg y and r edundancy as information theoretica l qua n tities [6] and use them a s a measure of co ordination. Sy ne r gy is found when meas ur- ing tw o or more v ariables to gether with resp ect to another (e.g. the so urce’s s ignal) results in a greater infor ma- tion gain than the sum o f that from each v ariable sep a- r ately [4, 5]. In sear c h problems , sy ne r gy is adv antageous bec ause then the c o or dination of tw o or more sea rc hers is more efficient than the same searchers w orking indep en- dent ly . In this section we will intro duce thes e concepts in general terms befor e applying them to a sp ecific search problem. Consider the sto chastic v ariables X i , i = 1 . . . n . Each v ariable X i , r epresentin g a searcher or so urce lo cation, can take on sp ecific states, denoted by the cor respo nding low ercase letter x i . F or a single v a riable X i the Shannon ent ro p y (henceforth “ e n tropy”) is S ( X i ) = − X x i P ( x i ) log 2 P ( x i ) , where P ( x i ) is the probability that the v ariable X i takes on the v alue x i [6]. The sum is ov er all o f the po ssible states x i ; since P ( x i ) < 1 always,the entrop y is a lw ays po sitiv e. The ent ro py is a meas ur e of uncertain ty abo ut the state of X i , therefore entrop y can only decr ease or remain unc hanged as mor e v ariables are measured. The conditional en tropy of a v ariable X 1 given a second v a ri- able X 2 is S ( X 1 | X 2 ) = − X x 1 ,x 2 P ( x 1 , x 2 ) log 2 P ( x 1 , x 2 ) P ( x 2 ) ≤ S ( X 1 ) . This e x pression contains a s um over the join t probabil- it y distribution of t wo v ariables. Since measuring a sec- ond v ariable can only decr ease entrop y (or leav e it un- changed), the conditional e ntropy is bounded ab ov e by the en tropy of the first v ariable. The mutual informa tio n betw een t wo v ariables, which pla ys an impo rtant role in search s trategy , is defined as the change in en tropy when a v ariable is mea sured: I ( X 1 , X 2 ) = S ( X 1 ) − S ( X 1 | X 2 ) ≥ 0 . This is also the difference betw een the en tropy o f one v ariable and its entrop y co nditioned o n the measur emen t of a second v ariable. Mutual information is a lways p osi- tive. These definitions can b e directly extended to m ul- tiple v ariables. Just a s entrop y may b e conditioned on an a dditional measur emen t, m utual information may b e conditioned on the knowledge of other v ariables. These quantities may be used to generate new information the- oretic co nstructs that we will us e in sp ecific sear c h pro b- lems. F o r three v ariables [15] the quantit y R ( X 1 , X 2 , X 3 ) ≡ I ( X 1 , X 2 ) − I ( { X 1 , X 2 }| X 3 ) (1) measures the degree of “ o verlap” in the information con- tained in v ariables X 1 and X 2 with resp ect to X 3 . The sign of this quantit y is meaningful. If R ( X 1 , X 2 , X 3 ) > 0, there is ov erlap and X 1 and X 2 are sa id to b e redundant with r espect to X 3 . If R ( X 1 , X 2 , X 3 ) < 0, mor e infor- mation is av ailable whe n these v a riables ar e considered together than when consider ed separa tely . In this case X 1 and X 2 are said to be s ynergetic with resp ect to X 3 . If R ( X 1 , X 2 , X 3 ) = 0, X 1 and X 2 are indep enden t. 2 UNCLASSIFIED (LA-UR 09-0767 6) B. Bay esian i nference and spati al i nfotaxis W e first formulate the general spa tial sto chastic search problem for N searc hers s e eking to find a sto chastic source lo cated in a finite, D -dimensional space. This is a generaliza tion of the single searcher formalism pre- sented in Ref. [18]. A t any time step, the searchers s i , i = 1 , 2 , . . . , N , are lo cated at po s ition r i and ob- serve some num be r o f particles h i from the source. The searchers do not g e t information ab out the tra jecto r ies or sp eed of the particles; they only get information if a par- ticle was observed or no t. Therefor e simple geometrica l metho ds such as triangulatio n a r e not p ossible. Consider a r andom v ariable R 0 , which can assume a nu mber of sp ecific v alues, denoted by r 0 . The v alues of r 0 refer to p ositions in spa ce tha t ma y contain the sto c has- tic source. Only one v alue of r 0 corres p onds to the (yet unknown) lo cation of the source s 0 . The sear c hers com- pute and share a probability distribution P ( t ) ( r 0 ) for the source lo cation at eac h time index t . Initially the proba- bilit y for the source P (0) ( r 0 ) is assumed to b e to b e uni- form. After each mea suremen t { h i , r i } , the sea rc hers up- date their estimated probability distribution of so urce p o- sitions via Bay esian inference [2] and decide what move to make (p ossibly remaining at the same p osition). The goal of Bay esian inference is to improv e an estimated proba- bilit y distribution P ( X ), where X is a r a ndom v a riable that can ass ume a set o f v a lues denoted b y x . Assuming that Y is another ra ndom v ariable (that can ass ume a set of v alues denoted b y y ) a nd that X and Y are not in- depe ndent (that is, I ( X , Y ) 6 = 0), k no wledge of the state of Y can be used to improv e P ( X ). After a measure- men t reveals Y = y , the pr obabilit y o f this measurement given the current e s timated is co mputed. The probabil- it y of this measurement is P ( Y = y | X ). Ba yesian in- ference ma k es it p ossible to a ssimilate this informatio n int o the current estimate of P ( X ) via a Bay esian up date step: P ( X ) = P ( X | Y = y ) = P ( Y = y | X ) P ( X ) / A , where A is a normaliza tion factor . This step includes an explicit statement of equiv alence beca use eac h new mea- surement is included implicitly in P ( X ). Therefore the measurement Y = y impr o ves the estimate of P ( X ). The searchers will us e this Bay esian inference framework to improv e their es timate o f the probability distr ibutio n of source lo cations P (0) ( r 0 ) after eac h measure ment h i , r i . T o decide where to move nex t, the searchers follow an infotaxis algor ithm for multiple sea r c hers. First the conditional pro babilit y P ( t +1) ( r 0 |{ h i , r i } ) ≡ 1 A P ( t ) ( r 0 ) P ( { h i , r i }| r 0 ) , (2) is calcula ted, where A is a norma liz a tion o ver all p ossi- ble source lo cations r 0 as required by B ayesian inference. This is then assimilated via Ba yesian update, P ( t +1) ( r 0 ) ≡ P ( t +1) ( r 0 |{ h i , r i } ) . (3) If the searchers do not find the s ource a t their prese n t lo cations they choos e the nex t lo c al move using an in- fotaxis step to maximize the exp ected infor mation gain. The exp ected infor mation gain is computed in the fol- lowing w ay . The entropy of the distributio n P ( t ) ( r 0 ) at time t is defined as S ( t ) ( R 0 ) ≡ − X r 0 P ( t ) ( r 0 ) log 2 P ( t ) ( r 0 ) . (4) F or a sp ecific measurement { h i , r i } the entrop y b efor e the Bay esian update is S ( t ) { h i ,r i } ( R 0 ) ≡ − X r 0 P ( t ) ( r 0 |{ h i , r i } ) lo g 2 P ( t ) ( r 0 |{ h i , r i } ) . (5) W e define the difference b etw een the entrop y at time t and the entrop y at time t + 1 after a measur emen t { h i , r i } to b e ∆ S ( t +1) { h i ,r i } ≡ S ( t +1) { h i ,r i } ( R 0 ) − S ( t ) ( R 0 ) . (6) F or a uniform prior, P (0) ( r 0 ) = 1 / M for M pos s ible lo- cations of the source in the discrete spa ce, the entrop y is max im um, S (0) ( R 0 ) = log 2 M . F o r each po ssible joint mov e { r i } , the change in exp ected entropy ∆ S is co m- puted and the mo ve with the minimu m (most negative) ∆ S is executed. The exp ected informatio n gain is found by computing the entrop y change for all of the p o ssible joint sea rc her mov es ∆ S = − X i P ( t ) ( R 0 = r i ) S ( t ) ( R 0 ) + 1 − X i P ( t ) ( R 0 = r i ) × X h 1 ,h 2 ∆ S ( t +1) { h i ,r i } X r 0 P ( t ) ( r 0 ) P ( t +1) ( { h i , r i }| r 0 ) . (7) The first ter m in Eq . (7) corres ponds to one o f the searchers finding the source in the next time step (the final entrop y will b e S = 0 so ∆ S = − S ). The second term considers the reduction in entrop y for all p ossible measurements at the prop osed lo c a tion, weigh ted by the probability of each o f those meas uremen ts. The pr oba- bilit y of the sear c hers obtaining the measure ment { h i } at the lo cation { r i } is given b y the trace o f the probabilit y P ( t +1) ( { h i , r i }| r 0 ) ov er all p ossible source lo cations. A t each step the searchers mov e join tly to increase the exp ected information gain as measured by the change in ent ro p y of the probability distribution. Although this algorithm is general in the following we conside r only the case of tw o s earchers ( N = 2) a nd b oth o ne- and t wo- dimensional spatia l domains. II I. SEAR CHING F OR CORRELA T ED SIGNALS IN ONE DIMENSION Sources that emit uncorrelated signals provide no op- po rtunit y for co ordination because the sea r c hers are 3 UNCLASSIFIED (LA-UR 09-0767 6) never sy nergetic [11]. W e instead consider s ignals with spatial, tempor al, or other correla tions. The simplest nontrivial example is searching in a one-dimensional do - main for a source tha t emits t wo particles simultaneously in o pp osite directions. Two searchers should b e able to exploit the cor relations in the signa l; if bo th sea rchers simult aneo usly o bserve particles, they can immediately conclude that the s ource is lo cated b etw een them. There- fore we exp ect synerg y to b e p o ssible for some spatial arrang emen ts of the s o urce and sear c hers. First consider a finite one-dimensional domain with a source s 0 and tw o searchers s 1 and s 2 at the corres p ond- ing po sitions { r 0 , r 1 , r 2 } ∈ [0 , 1]. The source is assumed emit t w o particles simultaneously and in opp osite direc - tions. That is, one par ticle is emitted to the left a nd one to the rig h t of the s ource. The tw o s earchers s 1 and s 2 are ident ical with a fixed cro ss section such that 0 < a < 1 is the probability of a sea rc her capturing one of the parti- cles emitted from the source . At each step in the s e arch the num ber o f pa r ticle “hits” meas ured by searchers s 1 and s 2 are denoted by h 1 ∈ { 0 , 1 } and h 2 ∈ { 0 , 1 } , re- sp ectiv ely . T o calculate R ( r 0 , h 1 , h 2 ) it is first necessary to com- pute the probabilities of h i for each searcher g iv en the po sition of the source r 0 . W e note that since there is no distance dependence in the ca pture probability a , it is sufficient to consider three separate cases dep ending on the relativ e positions, or ordering, of the s ource a nd the searchers, as shown in Fig. 1. F or exa mple, if s 1 is to the left of the s o urce a nd s 2 is to the right of the source, the order is s 1 s 0 s 2 . Note this is eq uiv alent to the case s 2 s 0 s 1 since the s earchers a re iden tical. s 0 s 1 s 2 r 0 r 1 r 2 0 1 s 1 s 0 s 2 r 1 r 0 r 2 0 1 s 1 s 2 s 0 r 1 r 2 r 0 0 1 FIG. 1: The three uniqu e cases for relative p ositio ns of the source and t wo iden tical searc hers on a one-dimensional do- main. Since the probab ly of detection in this example do es not dep end on distance, we need only consider the spatial ar- rangemen t of the source and searchers. The cases are labeled s i s j s k according to the relative spatial ordering for the source s 0 and searc hers s 1 , s 2 . Since the searc hers are identical, s 1 and s 2 are interc hangeable and there are only three uniqu e cases. If a searcher obser v es a par ticle, it is assumed to b e absorb ed so that the other se archer will not b e able to observe it. F or example if s 1 is b etw een s 2 and the source (case s 0 s 1 s 2 or s 2 s 1 s 0 ) then the proba bilit y that s 2 ob- serves a particle depends on whether s 1 observed it. If s 1 observed it, then the pro babilit y that s 2 observes it m ust b e 0. If s 1 did not observe it then the probability that s 2 will obs e r v e it is a P ( h 2 = 1 | h 1 = 1 , r 0 ) = 0 , (8) P ( h 2 = 1 | h 1 = 0 , r 0 ) = a. (9) W e ca n use the probability relation P ( h 2 , h 1 | r 0 ) = P ( h 2 | h 1 , r 0 ) P ( h 1 | r 0 ) (10) to compute the t wo-searcher conditional pr obabilities P ( h 2 = 1 , h 1 = 1 | r 0 ) = 0 , (11) P ( h 2 = 1 , h 1 = 0 | r 0 ) = a (1 − a ) . (12) The other pro babilit y distributions ar e computed using similar reaso ning. The r e s ults are summarized in T a ble I. Cases h 1 , h 2 P ( h 1 | r 0 ) P ( h 2 | r 0 ) P ( { h 1 , h 2 }| r 0 ) 1 , 1 a a (1 − a ) 0 s 0 s 1 s 2 1 , 0 a 1 − a (1 − a ) a s 2 s 1 s 0 0 , 1 1 − a a (1 − a ) a (1 − a ) 0 , 0 1 − a 1 − a ( 1 − a ) (1 − a ) 2 1 , 1 a a a 2 s 1 s 0 s 2 1 , 0 a 1 − a a (1 − a ) s 2 s 0 s 1 0 , 1 1 − a a a (1 − a ) 0 , 0 1 − a 1 − a (1 − a ) 2 1 , 1 a (1 − a ) a 0 s 0 s 2 s 1 1 , 0 a (1 − a ) 1 − a a (1 − a ) s 1 s 2 s 0 0 , 1 1 − a (1 − a ) a a 0 , 0 1 − a (1 − a ) 1 − a (1 − a ) 2 T ABLE I: Conditional probabilities for the six p ossible ar- rangemen ts of th e source s 0 and searc hers s 1 , s 2 sho wn in Fig. 1. S ince the searc hers are iden tical, s 1 and s 2 are inter- changea ble and th ere are only three unique cases. In cases s 0 s 1 s 2 and s 2 s 1 s 0 , searcher one is b et ween the source and searc her tw o. A particle emitted by th e source in the direc- tion of the searc hers wil l reach searc her one fi rst. If searcher one detects th e particle, searcher tw o will not be able to d e- tect it. S earc her tw o will only hav e a chance of detecting the particle if the particle passes through searc her one unde- tected. Similarly , in cases s 0 s 2 s 1 and s 1 s 2 s 0 , the source is b et wee n the searchers and the searc hers d o not interfere with eac h other. F urthermore, since the source emits tw o p articles sim ultaneously in opposite directions, in only these cases do b oth searchers h a ve a c hance of each d etecting a particle. Using T able I, we can ana ly tically compute the infor - mation theoretic quantities we need to de ter mine s ynergy and redundancy . These are R ( h 1 , h 2 , r 0 ) = I ( h 1 , h 2 ) − I ( h 1 , h 2 | r 0 ) , (13) I ( h 1 , h 2 ) ≡ X h 1 ,h 2 P ( h 1 , h 2 ) log 2 P ( h 1 , h 2 ) P ( h 1 ) P ( h 2 ) , (14) and I ( h 1 , h 2 | r 0 ) ≡ P h 1 ,h 2 R 1 0 dr 0 P ( h 1 , h 2 , r 0 ) (15) × log 2 P ( h 1 , h 2 | r 0 ) P ( h 1 | r 0 ) P ( h 2 | r 0 ) ; 4 UNCLASSIFIED (LA-UR 09-0767 6) where the probabilit y distributions are calculated as fol- lows: P ( h 1 , h 2 , r 0 ) = P ( h 1 , h 2 | r 0 ) P ( r 0 ) , (16) P ( h 1 , h 2 ) = Z 1 0 dr 0 P ( h 1 , h 2 | r 0 ) P ( r 0 ) , (17) P ( h 1 ) = Z 1 0 dr 0 P ( h 1 | r 0 ) P ( r 0 ) , (18 ) P ( h 2 ) = Z 1 0 dr 0 P ( h 2 | r 0 ) P ( r 0 ) . (19 ) Initially we consider a uniform pr obabilit y distribution (prior) of source lo cations: P ( r 0 ) = 1. F or small capture probability , a , we can expand Eq. (13) as a T aylor series in a to g et an analytica l so- lution for the cr itical v alues a c where R | a = a c = 0 . F or r 1 > r 2 , the critical v alues are given b y a c = s 3( r 2 − r 1 ) log ( r 1 − r 2 ) r 3 1 − r 3 2 − 3 r 2 1 + 2 r 1 + r 2 . (20) F or r 1 < r 2 , a c is given by E q. (2 0) under the trans- formations r 1 → r 2 and r 2 → r 1 . These r elations give the approximate b oundary b et ween the regions of syn- ergy and redundancy . In the limit r 1 → r 2 , R → 0. F or these for m ulas we used a uniform s ource distr ibution P ( r 0 ) = 1 but it is p ossible to rep eat these ca lculations with a differ e n t P ( r 0 ). F or la rger v alues of a , when the expans ion is no longer v alid the co ndition R = 0 [as in Eq. (13)] can b e solved nu merica lly . Figure 2 shows R ( h 1 , h 2 , r 0 ) as a function of the captur e probability a and sear c her s 1 lo cation r 1 with searcher s 2 fixed at r 2 = 2 / 3. This fig ure also shows R ( h 1 , h 2 , r 0 ) for a Gauss ian proba bilit y of the sourc e lo- cation P ( r 0 ) = B exp( − ( r 0 − 1 / 3) 2 ), where B is a nor mal- ization factor . In both ca ses, R > 0 (indicating redun- dancy) when the searchers are clos e together and R < 0 (indicating synergy) when they are further a part. F or the Gaussian distribution so ur ce lo cation synerg y is s trongest when s 1 is clo se to the s ource b ecause the mutual infor- mation b et ween r 0 and h 1 is p eaked there as well. Figure 2(a) shows how the capture probability a influ- ences the p ossible s trategies of the sea rchers. If a is close to 1 , then the sea rchers only realize synergy if they a re far a part, whic h max imize s the c hance of the source be- ing b et ween them. But if a is is clos e to 0 then nea r ly any arrang emen t of sea rchers is syner getic but only w eakly . Figure 2(b) demonstra tes the significa nce of the prior P ( r 0 ) in the c a lculation of R ( h 1 , h 2 , r 0 ). The v ariance of P ( r 0 ) is equal to 1, the size o f the domain, making the Gaussian distribution quite broad. Nonetheless, the fact that the prior is weakly p eaked at some point in the domain dramatically reduces the ar ea o f the r edundan t ( R > 0 ) region and a llo ws for muc h g reater synergy be- t ween the sear c hers. Although sea rch pro ble ms in the real world are r arely one-dimensiona l, this exa mple illus- trates the basic calculations for determining synerg y . 0 0 . 2 0 . 4 0 . 6 0 . 8 1 a ( a ) R e dund a n t ( R > 0 ) S yn e r g e ti c ( R < 0 ) 0 0 . 2 0 . 4 0 . 6 0 . 8 1 r 1 0 0 . 2 0 . 4 0 . 6 0 . 8 a ( b ) S yn e r g e ti c ( R < 0 ) r 2 r 2 FIG. 2: Syn ergetic and redundant regions for t w o sea rchers in the one-dimensional correlated searc h problem. The v alue of R ( h 1 , h 2 , r 0 ) is shown for different lo cations r 1 of s 1 with s 2 held fi xed at r 2 = 2 / 3 and the capture p robabilit y v arying from a = 0 (no capture) to a = 1 (complete capture). D ark er regions represen t higher synergy (larger n egativ e v alues of R ) and th e white areas represent redund an cy . The critical con- tour line R = 0 separates the syn ergetic and redundant re- gions. (a) When the source is equally lik ely to be anywhere, P ( r 0 ) = 1, there is only w eak synergy . (b) Then the proba- bilit y of the source is a Gaussian distribution centered at 1 / 3, P ( r 0 ) ∝ exp( − ( r 0 − 1 / 3) 2 ), the synergy is highest n ear the source at 1 / 3 since the mutual information is highest there as w ell. The dashed line in (a) show s the critical va lues a c com- puted by th e approximation in Eq. (20); this approxima tion is go od for a c . 0 . 3. IV. SEARCHING FOR CORRELA TED SIGNALS IN TW O DIMENSIONS The one-dimensional example pr o vides a tracta ble starting p oint for generaliza tion to tw o-dimensiona l prob- lems. The simplest gener alization is the case of tw o mobile searchers and one stationary source in a tw o- dimensional finite do main. Imagine a source in whic h chemical or n uclear reactions are o ccurring and the pro d- ucts of the reactions lea ve the source with relative angu- lar correlatio ns. Our t w o-dimensio nal idealized pro blem consists o f a so ur ce that emits 2 particles simultaneously at each time step in oppos ite dire c tions a long some emis- sion axis. At ea c h time step, a new emission axis angle is chosen uniformly at r andom from (0 , 2 π ]. The particles mov e a long straig h t-line tra jectories but the sea rc hers are not able to meas ur e the velo cities of any detected pa r ti- cles, so g eometric metho ds such as triang ulation are not po ssible. 5 UNCLASSIFIED (LA-UR 09-0767 6) FIG. 3: Diagram for the t wo-dimensional example. The source p osition r 0 is fixed in the cen ter and th e searchers are d isks of radius d . At eac h time step the source emits tw o particles in in opp osite directions with a rand om angle. Eac h p ossible emission axis passing through the source correspond s to one of six cases for source and searc her confi gurations as giv en in T ables. I and I I. In the re a l world, sea rc hers could b e, for exa mple, au- tonomous mobile senso rs capable of detecting r adiation or o ther rea ction pro ducts fr o m the ab ov e exa mple. Most mo dern-day autonomous rob ots do not mov e muc h faster than a walking pace [13], la rgely due to the difficulties of navigating uncer tain ter rain sa fely . Thus mov ement is r elatively costly (backtrac king will take a significant amount of time) and the sear c hers s hould make decisions to refine their tra jectorie s often, using an y new a v ail- able information. F or this pr oblem, this mea ns that the searchers can only make s mall discre te movemen ts b e- t ween measurements. T o repr esen t simplified mobile autono mous robo ts, we cast the sea rchers as iden tical disks of r adius d that mov e on a reg ula r Car tesian gr id. Unlike the one-dimensiona l case these searchers hav e spatial extent; there are tw o parts to the calculation of particle detection. First, if a particle trav els alo ng a str aight line tra jectory that passes through a searcher, the capture pro babilit y is 0 < a < 1 . As in the one-dimensiona l ex a mple, if a particle is ob- served b y a searcher, it is a bsorb ed so it ca nnot b e ob- served by the other sea rcher. Second, we must consider the probability that the particle’s tra jecto ry will pass through the sea rc her. This is a function of the searcher radius d and the distance to the so urce. The v ariables r 0 , r 1 , and r 2 for the p ositions of the sour c e and sea rch ers each hav e t wo comp onent s, e.g.( r 0 ,x , r 0 ,y ), since they r ep- resent positio ns on a tw o-dimensional grid. As in the one-dimensional example, there are differ- ent cases for the pr o babilities which dep end on the rel- ative p osition of the t w o sea rchers to the s ource. F or all po ssible straig h t line emission axe s passing thr ough the source, some lines ma y pass through no searchers (case s 0 ), only sear c her s 1 (case s 0 s 1 ), or only sea r c her s 2 (case s 0 s 2 ). If a line passes throug h b oth searchers, the so urce is b etw een the searchers (case s 1 s 0 s 2 as in the one-dimensional example), or one of the other sear c hers is in front of the other (cases s 0 s 1 s 2 and s 0 s 2 s 1 as in the one-dimensional example). These cases are illustr ated in Fig. 3 . F or any source lo cation, there will b e a rang e of a ngles ∆ θ c for each case c . The probabilities for the cases that do not appear in the one-dimensional example (see T able I) are detailed in T a ble II. Quantit ies such as P ( h 1 , h 2 | r 0 ) are a sup erpo sition of the v alues for the different cases, w eighted by the prop ortion of angles cor- resp onding to ea ch case P ( h 1 , h 2 | r 0 ) = X c ∈{ cases } ∆ θ c 2 π P c ( h 1 , h 2 | r 0 ) , (21) and similar ly for other quantities such as P ( h 1 | r 0 ), etc. While it is in principle po ssible to find the ∆ θ c analyti- cally using geometry , in pra ctice it is m uch mor e efficient to do this n umerically . Case h 1 , h 2 P ( h 1 | r 0 ) P ( h 2 | r 0 ) P ( { h 1 , h 2 }| r 0 ) 1 , 1 0 0 0 s 0 1 , 0 0 1 0 0 , 1 1 0 0 0 , 0 1 1 1 1 , 1 a 0 0 s 0 s 1 1 , 0 a 1 a 0 , 1 1 − a 0 0 0 , 0 1 − a 1 1 − a 1 , 1 0 a 0 s 0 s 2 1 , 0 0 1 − a 0 0 , 1 1 a a 0 , 0 1 1 − a 1 − a T ABLE I I: Co nditional probab ilities for cases uniqu e to the tw o dimensional example in Fig. 3. The cases s 1 s 0 s 2 , s 0 s 1 s 2 , and s 0 s 2 s 1 (not shown), are identical to those of the one di- mensional problem given in T able I. As sho wn in Figure 3, the case s 0 corresponds to th e range of angles for which it is imp ossible fo r either searc her to detect a particle. Case s 0 s 1 corresponds to the range of angles for whic h only searcher one has a c hance of detecting a particle, and case s 0 s 1 corre- sp on d s to t h e range of angles for which only searcher tw o has a c hance of detectin g a particle. Note that the differen t c ases in the one- dimens io nal example were taken in to ac coun t implicitly dur ing inte- gration as in E q. (19). In the tw o-dimensional exa mple they are taken into account when the effective probabil- it y distributions are computed as a superp osition of the probabilities of the individual cases. This is b ecause ther e is mo r e than one case for each so urce lo cation rela tiv e to the sea r c hers. W e illus tr ate the tw o-dimensional sea rc her pro blem with a setup of sea rc her and source lo cations that illus- trate the sy ner getic and redundant p ositions. W e use the Gaussian prior for the initial guess P ( r 0 ) = A exp − || r 0 − s || 2 σ 2 , (22) 6 UNCLASSIFIED (LA-UR 09-0767 6) where A is the nor malization and σ deter mines the ov er- all shap e o f the distribution. The v ector s = (2 , 2) is the most probable po sition of the source. The quan- tit y R ( h 1 , h 2 , r 0 ) [see E q. (1)] determines whether the searchers ar e po sitioned synergetica lly relative to the source. When the sear chers are per forming an infotaxis search, r ealizing s ynergetic r elative p ositions will in prin- ciple lea d to the fastest reduction in uncertaint y . In Fig. 4 we plot R as a function of the p osition of one searcher r 1 with the po sition o f the se cond s e a rcher r 2 held fixed. W e find for this exa mple that o nly s ynergy ( R < 0) is possible. The light ar e as in Fig. 4 co r resp ond to weak synergy and the dark area s to strong e r synergy . As in the one-dimensional exa mple synergy is stro ngest for large a and when s earcher s 1 is near the sour c e and not b ehind searcher s 2 . A s ma ll c r oss section [ a = 0 . 25 in Fig. 4(a)] allows only for w eak synergy , wherea s a larger cross section [ a = 0 . 75 in Fig. 4(b)] gives muc h s tronger synergy for certain relative p ositions. The strong e st sy n- ergy comes fro m a large cro s s section pair ed with opti- mal p ositioning. The maximum s y nergy is r ealized when searcher s 1 is clo se to the pe ak of P and esp ecially when the p eak o f P is b etw een the se archers, Note that un- fav orable positions (such as r 1 = (5 , 2), be hind sear c her s 2 ) provide minimal synergy regardles s o f the v alue of a . F or real-world problems, larger cros s sections yield more information and therefor e s tr onger syner gy is p os- sible. Howev er for some applicatio ns the cross section of a senso r o n a searcher ma y b e limited by pr actical con- siderations such as weigh t or p o wer consumption. This example shows that synergy is still p ossible for small a . F urthermore, this e xample emphasizes the importa nc e of the pro babilit y es timate of so urce lo cations P ( r 0 ). The infotaxis algorithm is designed such that the searchers will explore, gathering new information, if their ar range- men t is not sufficient ly syne r getic to warrant exploita- tion. This allows the sear c hers to succeed even with no starting informatio n, but they may not realize stro ng syn- ergy until the estimate of P ( r 0 ) is sufficien tly refined. V. CONCLUSION In this work we studied sear ch alg orithms for au- tonomous a g en ts lo o king for the spatial lo catio n of a sto c hastic sourc e . In spatia l search problems, since the exploitation of syner gy r e q uires spa tia l or tempora l co r- relations, we c o nsidered pr oblems in which a so urce emits t wo par ticle s sim ultaneously in opp osite direc tio ns. This is a simplification o f physical problems in whic h there is a r eaction and the pr oducts travel in directions that have angular correlatio ns . W e show ed that both syner gy and redundancy are p ossible for o ne-dimensional sea r c h pro b- lems but not fo r t wo-dimensional searches, where only synergy is po ssible. Since even unfav ora ble arr angements of sear c hers a re syner getic, in tw o-dimensio nal sea r c h problems like these coo rdination is a lw ays a dv a n tageous. 0 1 2 3 4 y ( a ) r 2 S yn e r g e ti c ( R < 0 ) 0 1 2 3 4 5 6 x 0 1 2 3 y ( b ) r 2 S yn e r g e ti c ( R < 0 ) FIG. 4: Synergy for t wo searc hers for tw o-dimensional corre- lated signals. The v alue of R ( h 1 , h 2 , r 0 ) is shown as a function of th e p osition r 1 of searcher s 1 for tw o different v alues of the capture probability a : (a) a = 0 . 25; (b) a = 0 . 75. The p o- sition of searcher s 2 is fixed r 2 = (2 , 4). The most probable source lo cation (th e p eak of t h e Gaussian distribution for the initial source location) is at r 0 = (2 , 2). Darker blue corre- sp on d s to stronger sy nergy ( R < 0). Synergy is strongest for large a and when sea rcher s 1 is near the source and n ot b ehind searcher s 2 relativ e to the source. Simple exa mples such as these that can be studied an- alytically provide insight into real- w orld problems. In real-world problems, there will necessa r ily b e additional consideratio ns. It may not always b e p ossible to write a closed- fo rm equation for the nature o f the corr elations in the signal from the s ource. It may b e neces sary to di- rectly measure any correla tions and us e this to estimate capture probabilities. F urthermore, v arious probabilities may no t b e stationary in time or the signals from the source may get prog r essively w eaker. F or example, sig - nals from a radio tra nsmitter may decrea se in streng th ov er time as its batteries ar e slowly ex ha usted. An a ddi- tional cons ideration is that in the real-world, communica- tion b etw een a gen ts may only be pos sible at certa in times and may not b e instantaneous as in our simple examples. These general consideratio ns are cr ucial for the exploita- tion of multi-agen t info ta xis in terms o f the design of optimal collective algor ithms in particular applications . The next steps for ma king this a ppr oach applicable to a broader class of problems, including those not limited to spatial sear ches[3], are to gener alize the results to more than tw o sear c hers and to explore how synergy may b e bes t leveraged to giv e increases in search sp eed and effi- ciency . 7 UNCLASSIFIED (LA-UR 09-0767 6) Ackno wledgments This work was supp orted in pa rt by a DCI IC Post- do ctoral F ellowship and the Department of Ener g y at Los Alamos National Lab oratory under co n tract DE-AC52- 06NA2539 6 throug h the Lab orator y Direc ted Resea rch and Developmen t Progra m. This is published under re- lease LA-UR 09 -07676 . [1] A. K. Agogino and K. T umer. Analyzing and visualizing multia gent rewards in dynamic and sto c hastic domains. Aut onomous A gent s and Multi-A gent Systems , 17(2):320, 2008. [2] J. M. Bernardo and A. F. M. Smith. Bayesian The e ge- sory . Wiley , New Y ork, 1994. [3] L. M. A. Bettencourt . The rules of information aggre- gation and emergence of collectiv e intel ligent b eha vior. T opics in Co gnitive Scienc e , 1:598, 2009. [4] L. M. A. Bettencourt, V. Gintautas, and M. I. Ham. Iden- tification of functional in formation subgraphs in complex netw orks. Phys. R ev. L ett. , 100:238 701, 2008. [5] L. M. A. Bettencourt, G. J. Stephen s, M. I. Ham, and G. W. Gross. F unctional structu re of cortical neuronal netw orks grow n in vitro. Phys. R ev. E , 75:021915, 2007. [6] T. M. Co ver and J. A. Thomas. El ements of I nformation The ory . Wiley , New Y ork, 1991. [7] M. Eisen bac h and J. W. L en geler. Chemotaxis . Imp erial College Press, London, 2004. [8] S. Fine, R. Gilad-Bachrac h, and E. S hamir. Query by committee, linear separation and rand om w alks. The or. Comput. Sci. , 284(1):25, 2002. [9] J. F o x, D. Glasspo ol, and J. Bury . Qu an titative and qualitative approaches to reas oning un d er un certainty in medical decision making. I n Artificial Intel ligenc e i n Me dicine: L e ctur e Notes i n Computer Scienc e , volume 2101, pages 272–282 . Springer, Berlin/Heidelb erg, Ger- many , 2001. [10] Y. F reund, E. Shamir, and N. Tishb y . Selectiv e sampling using th e query by committee algorithm. In Machine L e ar ning , page 133, 1997 . [11] V. Gintautas, A . Hagberg, and L. M. A. Bettencourt. When is so cial computation b etter than th e sum of its parts? In H. Liu, J. J. Salerno, and M. J. Y oung, ed itors, So cial Computing, Behavior Mo deling, and Pr e diction , page 93, 2009. [12] G. Hollinger, S. Singh, J. Djugash, and A. Kehagias. Ef- ficient m ulti-rob ot search for a moving target. The I n- ternational Journal of R ob otics R es e ar ch , 28(2):201–219, 2009. [13] R. Playter, M. Buehler, and M. Raib ert. Bigdog. In G. R. Gerhart, C. M. S hoemaker, and D. W. Gage, editors, Pr o c . SPIE: Unm anne d Systems T e chno lo gy VIII , volume 6230, 2006. [14] R. A. Russell, A. Bab-Hadiashar, R . L. S hepherd, and G. G. W all ace. A compari son of reactive rob ot c hemo- taxis algorithms. R ob ot ics and Auton omous Systems , 45(2):83, 2003. [15] E. S c hneidman, W. Bialek, and M. J. Berry I I. Synergy , redundancy , and indep endence in p opulation co des. J. Neur osci. , 23:1 1539, 2003. [16] H. S. Seung, M. Opp er, an d H. Sompolinsky . Query by committee. In C OL T ’92: Pr o c e e dings of the fifth annual workshop on C omputat ional le arning the or y , page 287, 1992. [17] R. S. Sulton and A. G. Barto. R einfor c ement le arning: an intr o duction . MIT Press, Cam brigde MA, 1998. [18] M. V ergasso la, E. V illermaux, and B. I. Shraiman. “In- fotaxis” as a strategy for searching without gradients. Natur e , 445: 406, 20 07. [19] W. Zhang, Z. Deng, G. W ang, L. Wittenburg, and Z. Xing. Distributed prob lem solving in sensor net- w orks. In AAMAS ’02: Pr o c e e dings of the first interna- tional j oint c onfer enc e on A utonomous agents and mul - tiagent systems , pages 988–989, New Y ork, NY, U SA, 2002. AC M. 8
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment