Semidefinite representation of convex hulls of rational varieties
Using elementary duality properties of positive semidefinite moment matrices and polynomial sum-of-squares decompositions, we prove that the convex hull of rationally parameterized algebraic varieties is semidefinite representable (that is, it can be…
Authors: Didier Henrion (LAAS, CTU/FEE)
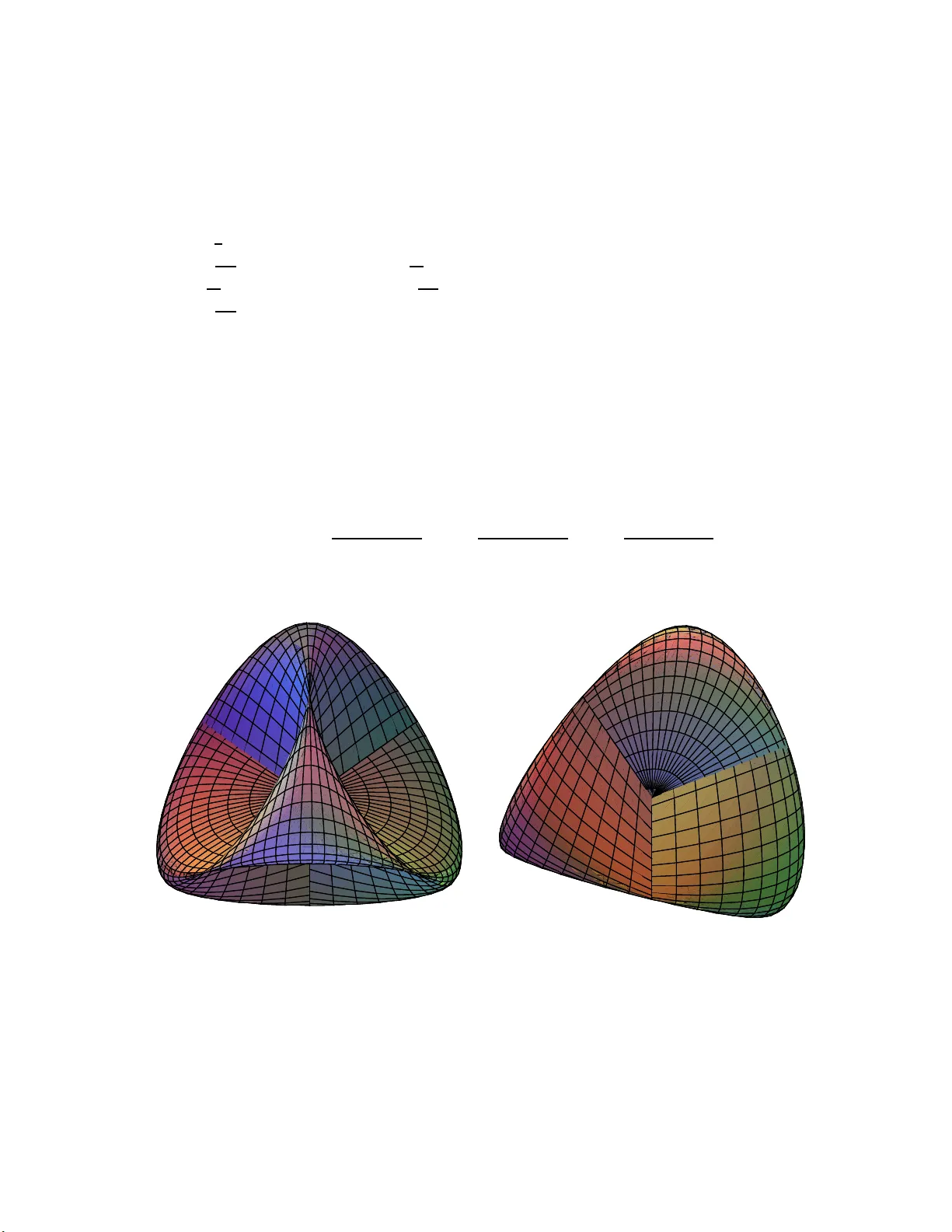
Semidefinite represen tation of con v ex h ulls of rational v arieties Didier Henrion 1 , 2 No vem ber 9, 2018 Abstract Using elemen tary du alit y prop erties of p ositiv e semidefin ite momen t matrices and p olynomial sum-of-squares deco mp ositions, w e pro v e that the con v ex h ull of rationally parameterize d alge braic v ariet ies is semidefinite represen table (that is, it can b e represented as a pro jection of an affine section of the cone of p ositiv e semidefinite m atrices) in the case of (a ) curv es; (b) h yp ersurfaces parameterized b y quadratics; and (c) h yp ersurfaces parameterized b y biv ariate quartics; all in an am bien t space of arbitrary d imension. 1 In t ro duction Semidefinite programming, a v ersatile extension o f linear programming to the con vex cone of p ositive semidefinite matrices (semidefinite cone f o r short), has found man y applica- tions in v arious areas of applied mathematics and engineering, esp ecially in com binatorial optimization, structural mec hanics and systems con trol. F or example, semidefinite pro- gramming w a s used in [6 ] to deriv e line ar matrix inequalit y (LMI) conv ex inner appro xi- mations o f non-conv ex semi-algebraic stabilit y regions, and in [7] to deriv e a hierarch y of em b edded con v ex LMI outer appro ximations of non-conv ex semi-algebraic sets arising in con trol problems. It is easy to prov e that affine sections and pro jections of the semidefinite cone are con v ex semi-algebraic sets, but it is still unknow n whether a ll con v ex semi-algebraic sets can b e mo deled lik e this, or in other w ords, whether all con v ex semi-algebraic sets are semidefinite represen table. F ollo wing the dev elopment of p olynomial-time in terior-p oint algorithms to solv e semidefinite programs, a long list o f semidefinite represen table semi-algebraic sets and con v ex hulls w as initiated in [10] and completed in [1]. Latest achie v emen t s in the field are rep orted in [8] and [5]. 1 CNRS; LAAS; 7 aven ue du colonel Ro che, F-31 077 T oulouse; F rance; Universit´ e de T oulouse; UPS, INSA, INP , ISAE; LAAS; F-3107 7 T oulouse; F rance 2 F acult y of Electr ical Engineering , Czec h T ec hnical University in Prag ue, T echnic k ´ a 2, CZ-1 6626 Prague , Czech Republic 1 In this pap er w e aim at enlarging the c lass of se mi-algebraic sets whose con v ex h ulls are explicitly semidefinite represen table. Using elemen ta ry duality pro p erties o f p ositiv e semidefinite momen t matrices and p olynomial sum-of- squares decomp ositions – nicely re- cen tly surve y ed in [9] – w e pro v e that the con v ex h ull of rationally parameterized alg ebraic v arieties is explicitly semidefinite represen table in the case of (a) curv es; (b) h yp ersurfaces parameterized b y quadratics; and ( c) h yp ersurfaces pa rameterized by biv ariate quartics; all in an a m bien t space of arbitra r y dimension. Rationally parameterized surfaces arise often in engineering, a nd esp ecially in computer- aided design (CAD) . F o r example, the CA TIA (Computer Aided Three-dimensional In- teractiv e Application) soft w are, dev elop ed since 1981 by the F rench company Dassault Syst ` emes, use s rationally parameterized s urfaces as its core 3D surface repres en tation. CA TIA w as origina lly used to deve lop Dassault’s Mirage figh ter jet for the F rench air- force, and then it w as a dopted in a erospace, automotiv e, shipbuilding, and ot her indus- tries. F or example, Airbus aircrafts are designed in T oulouse with the help of CA TIA, and arc hitect F rank G ehry has used the soft w are to design his curvilinear buildings, like the Guggenheim Museum in Bilbao or the D ancing House in Prague, near the Charles Square buildings of the Czec h T ec hnical Unive rsit y . 2 Notations and d e finition s Let x = [ x 0 , x 1 , , · · · , x m ] ∈ R m +1 and ζ d ( x ) = [ x d 0 , x d − 1 0 x 1 , x d − 1 0 x 2 , · · · , x d − 2 0 x 2 1 , · · · , x d m ] ∈ R s ( m,d ) [ x ] denote a basis v ector of m -v a riate forms of degree d , with s ( m, d ) = ( m + d )! / ( m ! d !). Let y = [ y α ] | α |≤ 2 d ∈ R s ( m, 2 d ) b e a real-v a lued sequence indexed in basis ζ 2 d ( x ), with α ∈ N m and | α | = P k α k . A form x 7→ p ( x ) = p T ζ 2 d ( x ) is expressed in this ba sis via its co efficien t vec tor p ∈ R s ( m, 2 d ) . Giv en a sequence y ∈ R s ( m, 2 d ) , define the linear mapping p 7→ L y ( p ) = p T y , and the linear moment matrix M d ( y ) satisfying the relation L y ( pq ) = p T M d ( y ) q for all p, q ∈ R s ( m,d ) . It has entries [ M d ( y )] α,β = L y ([ ζ d ( x ) ζ d ( x ) T ] α,β ) = y α + β for all α, β ∈ N m , | α | + | β | ≤ 2 d . F or example, when m = 2 and d = 2 (t r iv ariate quartics) w e ha v e s ( m, 2 d ) = 1 5 . T o the fo r m p ( x ) = x 4 0 − x 0 x 1 x 2 2 + 5 x 3 1 x 2 w e asso ciate the linear mapping L y ( p ) = y 00 − y 12 + 5 y 31 . The 6-by -6 momen t matrix is given b y M 2 ( y ) = y 00 ∗ ∗ ∗ ∗ ∗ y 10 y 20 ∗ ∗ ∗ ∗ y 01 y 11 y 02 ∗ ∗ ∗ y 20 y 30 y 21 y 40 ∗ ∗ y 11 y 21 y 12 y 31 y 22 ∗ y 02 y 12 y 03 y 22 y 13 y 04 where symmetric en tr ies are denoted by star s. See [9] for mor e details on these no tations and constructions. Giv en a set Z , let con v Z denote its con v ex h ull, the smallest con v ex set con taining Z . Finally , t he notation M d ( y ) 0 means that matrix M d ( y ) is p ositiv e semidefinite. 2 3 Con v e x cone s a nd momen t matrices Consider the V eronese v ariet y W m,d = { ζ 2 d ( x ) ∈ R s ( m, 2 d ) : x ∈ R m +1 } and the con vex cones Z m,d = con v W m,d and Y m,d = { y ∈ R s ( m, 2 d ) : M d ( y ) 0 } . Theorem 1 If m = 1 or d = 1 or d = m = 2 then Z m,d = Y m,d . Pro of : The inclusion Z m,d ⊂ Y m,d follo ws from the definition o f a moment matrix since M d ( ζ 2 d ( x )) = ζ d ( x ) ζ d ( x ) T 0 . The con v erse inclusion is sho wn by contradiction. Assum e that y ∗ / ∈ Z m,d and hence that there ex ists a (strictly separating) h yp erplane { y : p ( y ) = 0 } suc h that p T y ∗ < 0 and p T y ≥ 0 f o r all y ∈ Z m,d . It f o llo ws that form x 7→ p ( x ) = p T ζ 2 d ( x ) is globally non-negative. Since m = 1 or d = 1 or d = m = 2, the for m can b e expressed as a sum of squares of f o rms [9, Theorem 3.4] and we can write p ( x ) = P k q 2 k ( x ) = P k ( q T k ζ d ( x )) 2 = ζ d ( x ) T P ζ d ( x ) for some matrix P = P k q k q T k 0. Then L y ( p ) = p T y = trace ( P M d ( y )) = P k q T k M d ( y ) q k . Since L y ∗ ( p ) < 0, there must b e a n index k suc h that q T k M d ( y ∗ ) q k < 0 a nd hence matrix M d ( y ∗ ) cannot b e p ositiv e semidefinite, which pr ov es t ha t y ∗ / ∈ Y m,d . See also [4] for a study o f the momen t problem in the biv ariate quartic case ( d = m = 2 ). 4 Rational v arieties Giv en a matrix A ∈ R ( n +1) × s ( m, 2 d ) , w e define the r ational v ariety V m,d (of degree 2 d with m par ameters in an n -dimensional am bien t space) as an affine pro jection of the V eronese v ariet y W m,d : V m,d = A ( W m,d ) = { v ∈ R n : 1 v = Aζ 2 d ( x ) , x ∈ R m +1 } . Theorem 1 iden tifies t he cases whe n the con v ex h ull of this rational v ariet y is exactly semidefinite represen ta ble. That is, when it can b e formulated as the pro jection of an affine section of the semidefinite cone. Corollary 1 I f m = 1 o r d = 1 or d = m = 2 then con v V m,d = { v ∈ R n : 1 v = Ay , M d ( y ) 0 , y ∈ R s ( m, 2 d ) } . 3 Pro of: W e ha v e conv V m,d = conv A ( W m,d ) = A (con v W m,d ) = A ( Z m,d ) and the result follo ws readily from Theorem 1. The case m = 1 corresp onds to ratio nal curv es. The case d = 1 corresp onds to quadrati- cally pa r ameterized rational hy p ersurfaces. The case d = m = 2 corresp onds to h yp ersur- faces para meterized b y biv aria te quartics. All these rational v arieties liv e in a n am bien t space of a r bitrary dimension n > m . In all other cases, the inclusion con v V m,d ⊂ A ( Y m,d ) is strict. F or example, when d = 3 , m = 2, the v ector y ∗ ∈ R 28 with non-zero en tries y ∗ 00 = 32 , y ∗ 20 = y ∗ 02 = 34 , y ∗ 40 = y ∗ 04 = 43 , y ∗ 22 = 30 , y ∗ 60 = y ∗ 06 = 128 , y ∗ 42 = y ∗ 24 = 28 is suc h that M 3 ( y ∗ ) ≻ 0 but L ∗ y ( p ∗ ) < 0 for the Motzkin form p ∗ ( x ) = x 6 0 − 3 x 2 0 x 2 1 x 2 2 + x 4 1 x 2 2 + x 2 1 x 4 2 whic h is globally non-negat ive. In o t her w o rds, y ∗ ∈ A ( Y m,d ) but y ∗ / ∈ conv V m,d . 5 Examples 5.1 P arab ola The parab ola V = { v ∈ R 2 : v 2 1 − v 2 = 0 } can b e mo deled as an affine pro jection o f a quadratic V eronese v ariet y V = { v ∈ R 2 : 1 v 1 v 2 = x 2 0 x 0 x 1 x 2 1 , x ∈ R 2 } , i. e. n = 2, d = 1, m = 1 and A is the 3- b y-3 iden tity matrix in the notat io ns of the previous section. By Corollary 1, the con v ex hull of the parab ola is the set con v V = { v ∈ R 2 : 1 v 1 v 2 = y 0 y 1 y 2 , M 1 ( y ) = y 0 y 1 y 1 y 2 0 , y ∈ R 3 } = { v ∈ R 2 : 1 v 1 v 1 v 2 0 } whic h is describ ed with a 2x2 LMI. 5.2 T refoil knot The space trigonometric curv e V = { v ∈ R 3 : v 1 ( α ) = cos α +2 cos 2 α , v 2 ( α ) = sin α +2 sin 2 α , v 3 ( α ) = 2 sin 3 α , α ∈ [0 , 2 π ] } 4 Figure 1: T ub e plot of the trefo il knot curve, whose conv ex h ull is exactly semidefinite represen table with 3 liftings. is called a t r efo il knot, see [2] and Figure 1. Using the standard c hange of v ariables cos α = x 2 0 − x 2 1 x 2 0 + x 2 1 , sin α = 2 x 0 x 1 x 2 0 + x 2 1 and trigono metric formulas, the space curv e admits a ratio na l r epresen tation as an affine pro jection of a sextic V eronese v ariety V = { v ∈ R 3 : 1 = ( x 2 0 + x 2 1 ) 3 , v 1 = ( x 2 0 + x 2 1 )(3 x 4 0 − 12 x 2 0 x 2 1 + x 4 1 ) , v 2 = 2 x 0 x 1 ( x 2 0 + x 2 1 )(5 x 2 0 − 3 x 2 1 ) , v 3 = 4 x 0 x 1 ( x 2 0 − 3 x 2 1 )(3 x 2 0 − x 2 1 ) , x ∈ R 2 } i.e. n = 3, m = 1 and d = 3 in the notations of the previous section. By Coro llary 1, the con v ex h ull of the trefoil knot curv e is exactly semide finite repre - sen ta ble as con v V = { v ∈ R 3 : 1 v = Ay , M 3 ( y ) 0 , y ∈ R 7 } with A = 1 0 3 0 3 0 1 3 0 − 9 0 − 11 0 1 0 10 0 4 0 − 6 0 0 12 0 − 40 0 12 0 and M 3 ( y ) = y 0 ∗ ∗ ∗ y 1 y 2 ∗ ∗ y 2 y 3 y 4 ∗ y 3 y 4 y 5 y 6 5 where symmetric entries are denoted b y stars. The affine system of equations inv olving v and y can b e solve d by Ga ussian elimination to yield the equiv alen t for mulation: con v V = { v ∈ R 3 : 1 6 (3 + v 1 + 2 u 1 − 4 u 3 ) ∗ ∗ ∗ 1 112 (10 v 2 + v 3 + 48 u 2 ) 1 18 (3 − v 1 − 20 u 1 − 2 u 3 ) ∗ ∗ 1 18 (3 − v 1 − 20 u 1 − 2 u 3 ) 1 224 (6 v 2 − 5 v 3 + 96 u 2 ) u 1 ∗ 1 224 (6 v 2 − 5 v 3 + 96 u 2 ) u 1 u 2 u 3 0 , u ∈ R 3 } whic h is an explicit semidefinite represen t a tion with 3 liftings. 5.3 Steiner’s Roman surface Quadratically parameterizable ra tional surfaces are classified in [3]. A w ell-kno wn example is Steiner’s Roman surface, a non-orientable quartic surface with three double lines, whic h is parameterized as follow s: V = { v ∈ R 3 : v 1 = 2 x 1 1 + x 2 1 + x 2 2 , v 2 = 2 x 2 1 + x 2 1 + x 2 2 , v 3 = 2 x 1 x 2 1 + x 2 1 + x 2 2 , x ∈ R 2 } see F igure 2. Figure 2: Tw o views of Steiner’s Roman surface, whose conv ex hull is semidefinite repre- sen ta ble with 2 liftings. The surface can b e mo deled as an affine pro j ection o f a quadratic V eronese v ariet y: V = { v ∈ R 3 : 1 = x 2 0 + x 2 1 + x 2 2 , v 1 = 2 x 0 x 1 , v 2 = 2 x 0 x 2 , v 3 = 2 x 1 x 2 , x ∈ R 3 } i.e. n = 3 , m = 2 a nd d = 1 in the notat io ns of the previous section. By Corollary 1 , its con v ex h ull is exactly semidefinite represen table as con v V = { v ∈ R 3 : 1 v = Ay , M 1 ( y ) 0 , y ∈ R 6 } 6 with A = 1 0 0 1 0 1 0 2 0 0 0 0 0 0 2 0 0 0 0 0 0 0 2 0 and M 1 ( y ) = y 00 ∗ ∗ y 10 y 20 ∗ y 01 y 11 y 02 . The affine system o f equations in v o lving v and y can easily b e solv ed to yield the equiv a len t form ulation: con v V = { v ∈ R 3 : 1 − u 1 − u 2 ∗ ∗ 1 2 v 1 u 1 ∗ 1 2 v 2 1 2 v 3 u 2 0 , u ∈ R 2 } whic h is an explicit semidefinite represen t a tion with 2 liftings. 5.4 Ca yley cubic surface Steiner’s Roman s urface, studied in the previous paragraph, is dual to Ca yley’s cubic surface { v ∈ R 3 : det C ( v ) = 0 } where C ( v ) = 1 ∗ ∗ v 1 1 ∗ v 2 v 3 1 . The origin b elongs to a set delimited b y a conv ex connected comp onen t of this surface, admitting the follo wing affine trigonometric parameterization: V = { v ∈ R 3 : v 1 ( α ) = cos α 1 , v 2 ( α ) = sin α 2 , v 3 ( α ) = cos α 1 sin α 2 − cos α 2 sin α 1 , α 1 ∈ [0 , π ] , α 2 ∈ [ − π , π ] } . This is the b oundary of the LMI region con v V = { v ∈ R 3 : C ( v ) 0 } whic h is therefore semidefinite represen table with no liftings. This set is a smo ot hened tetrahedron with four singular p oints , see Figur e 3. Using the standard c hange of v ariables cos α i = x 2 0 − x 2 i x 2 0 + x 2 i , sin α i = 2 x 0 x i x 2 0 + x 2 i , i = 1 , 2 w e obtain an equiv alent rational parameterization V = { v ∈ R 3 : 1 = ( x 2 0 + x 2 1 )( x 2 0 + x 2 2 ) , v 1 = ( x 2 0 − x 2 1 )( x 2 0 + x 2 2 ) , v 2 = 2 x 0 x 2 ( x 2 0 + x 2 1 ) , v 3 = 2 x 0 ( − x 1 + x 2 )( x 2 0 + x 1 x 2 ) , x ∈ R 3 } . 7 Figure 3: Con v ex connected comp onent of Cayle y’s cubic surface, semid efinite r epre- sen ta ble with no liftings. whic h is an affine pro jection of a quadratic V eronese v ariet y , i.e. n = 3, m = 2 and d = 2 in the notatio ns of the previous section. By Corollar y 1, its con v ex hu ll is exactly semidefinite represen ta ble as con v V = { v ∈ R 3 : 1 v = Ay , M 2 ( y ) 0 , y ∈ R 15 } with A of size 4-by -15 a nd M 2 ( y ) of size 6- by-6, not displa y ed here. It follows that con v V is semidefinite represen table as a 6- by-6 LMI with 11 liftings. W e hav e seen how ev er that con v V is also semidefinite represen table as a 3-b y-3 LMI with no liftings, a considerable simplification. It w ould b e inte resting to design a n algorithm simplifying a giv en semidefinite represen tation, lo w ering the size of the matrix a nd the n um b er of v ariables. As fa r a s w e know, no suc h algorithm exists at this date. 6 Conclus ion The w ell-kno wn equiv alence b et w een p olynomial non-negativity and existence of a sum- of-squares decomp osition was use d, join tly with semidefinite programming dualit y , to iden t ify the cases for whic h the conv ex h ull of a rationally pa r ameterized v ariety is exactly semidefinite represen table. Practically sp eaking, this means that optimization of a linear function ov er suc h v a rieties is equiv alen t to semidefinite programming, at the price of in tro ducing a certain n um b er of lifting v ariables. If the pro blem of detecting whether a plane algebraic curv e is rationa lly parameterizable, and finding explicitly suc h a parametrization, is reasonably w ell understo o d from the 8 theoretical and n umerical p oint of view – see [12] and M. V an Ho eij’s algcurves Maple pac k age for a n implemen tation – t he case of surfaces is muc h more difficult [13]. Up to our kno wledge, there is curren tly no w orking computer implemen tation of a pa rametriza- tion algo rithm for surfaces. Since an explicit parametrization is required for an explicit semidefinite represen ta tion of the con v ex hull o f v arieties, the general case of alg ebraic v arieties giv en in implicit form (i.e. a s a p olynomial equation), remains lar gely op en. Finally , w e exp ect that these semidefinite r epresen tability results ma y ha v e applications when studying non-con v ex semi-algebraic sets and v arieties arising from stability condi- tions in systems control, in the spirit of [6, 7]. Thes e dev elopmen ts are how ev er out of the scop e of the presen t pap er. Ac kn o w ledgmen ts The first draft b enefited fro m t echnic al advice by Jean-Bernard Lasserre, Monique Lau- ren t, Jo sef Schic ho and t w o anon ymous review ers. I am grateful to Bernd Sturmfels for p oin ting out an error in the co efficien ts of m y original lifted LMI formulation of the trefoil curv e when preparing pap er [11]. References [1] A. Ben-T al, A. Nemirov skii. Lectures on mo dern conv ex optimization. SIAM, 2001. [2] E. Briesk orn, H. Kn¨ orrer. Plane algebraic curv es. T ra nslated from the German b y J. Stillw ell. Birk¨ auser, 1986. [3] A. Coffman, A. J. Sc h w a r t z, C. Stan ton. The algebra and geometry of Steiner and other quadratically parametrizable surfaces. Computer Aided Geometric Design 13:257-2 86, 1996. [4] L. Fia lk ow, J. Nie. Pos itivit y of Riesz functional and solution of quadrat ic and quartic momen t problems. J. F unct. Analysis 258:3 28-356, 2 010. [5] J. W. Helton, J. Nie. Sufficien t and necessary conditions for semide finite repre- sen ta bility of con v ex hulls and sets. SIAM J. Optim. 20(2):759- 791, 2009 . [6] D. Henrion, M. ˇ Seb ek, V. Ku ˇ cera. P ositiv e p olynomials and robust stabilization with fixed-order con trollers. IEEE T rans. Autom. Con trol 48 (7):1178- 1 186, 2 003. [7] D. Henrion, J. B. Lasserre. Solving nonconv ex optimization problems - Ho w Glop- tiP oly is applied to problems in ro bust a nd nonlinear con trol. IEEE Control Syst. Mag. 24(3):72-83 , 2004 . [8] J. B. Lasserre. Con v ex sets with semidefinite represen tation. Math. Prog . 120:457– 477, 2 009. 9 [9] M. Lauren t. Sums o f squares, momen t matrices and o pt imizatio n ov er p olynomials. In: M. Putinar, S. Sulliv ant (Editors). Emerging applications of algebraic geometry . IMA V ol. Math. Appli. 14 9 :157-270 , Springer, 2009. [10] Y. Nesterov , A. Nemirovs kii. In terior-p oint p o lynomial a lgorithms in nonlinear opti- mization. SIAM, 1994. [11] K. Ranestad, B. Sturmfels. On the con v ex h ull of a space curv e. arXiv:0912. 2986 , 2009. [12] J. R. Sendra, F. Winkler, S. P´ erez-D ´ ıaz. Ra tional algebraic curv es: a computer algebra approac h. Springer, 2008. [13] J. Sc hic ho . Rational parametrization of surfaces. J. Sym b olic Comp. 26(1):1-29 , 1998. 10
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment