Towards Physarum robots: computing and manipulating on water surface
Plasmodium of Physarym polycephalum is an ideal biological substrate for implementing concurrent and parallel computation, including combinatorial geometry and optimization on graphs. We report results of scoping experiments on Physarum computing in …
Authors: Andrew Adamatzky
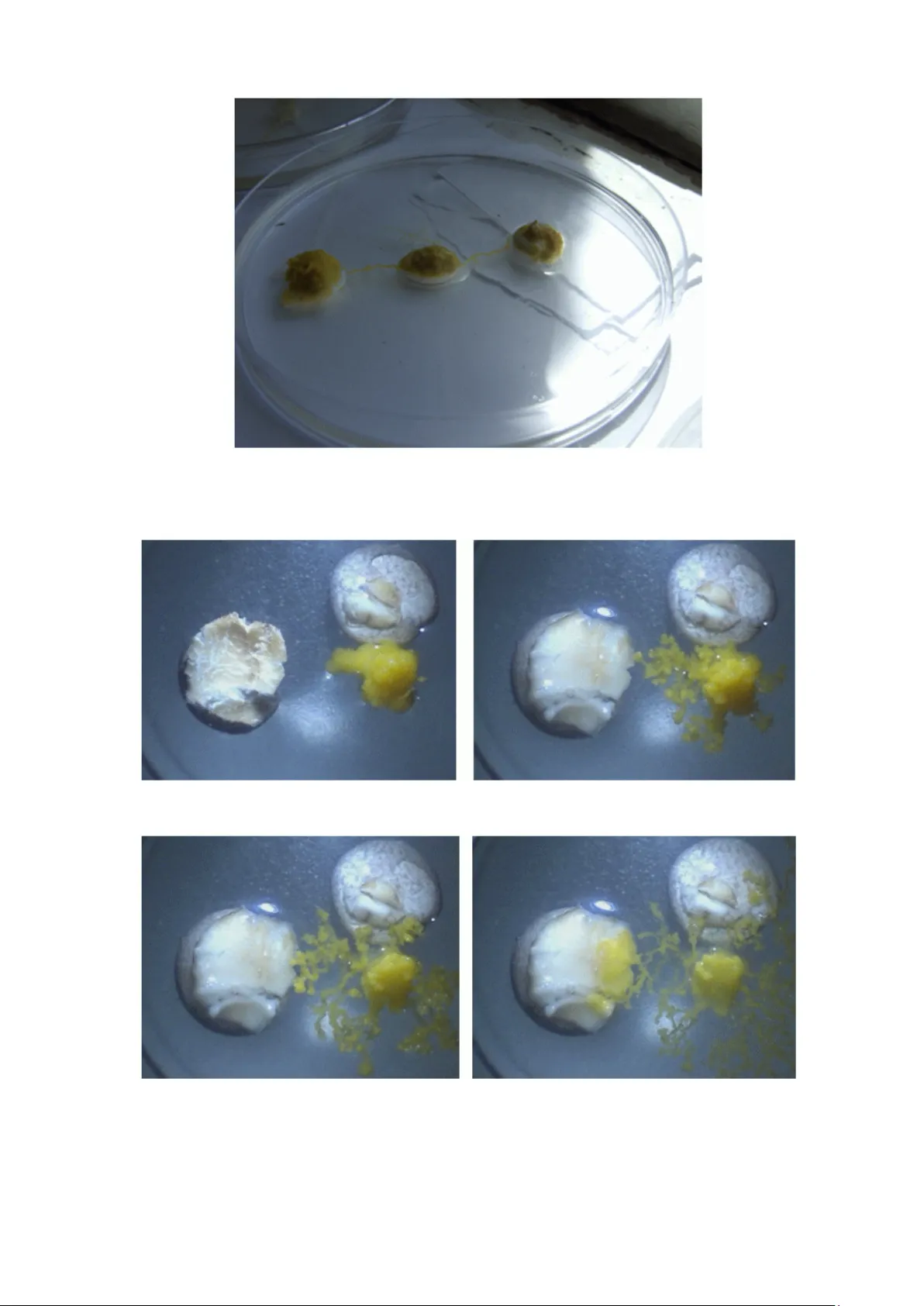
Adamatzky A. Towards Physarum rob ots Feb 2008 Towards Physarum robots: comp uting and mani pulating on w ater surface Andrew Adamatzky Computing, Engin eering and Mathematical Scien ces, Universit y of the West of Englan d, Bristol, United Kingdom and Bristol Robotics Lab oratory, Brist ol, United Kingdo m andrew.adamatzky@u we.ac.u k Abstract Plasmodium of Physarym polycephalum is an ideal biological substrate for implementing co ncurren t and parallel compu tation, in cluding combinat orial geometr y and optimiza tion on g raphs. We repo rt results of scoping experiments on Physarum computing in conditions of m inimal friction, on the water surface. We sho w that plasmodiu m of Physarum is capable for computing a basic spanning tree s and manipulating of light-weight objects. We speculate that our results pave the pathways towards design and implementa tion of amorphous bi ological rob ots. Key words: biological compu ting, amorphous robo ts, unconventional computation, a moeba Introduction Plasmodium, the vegetative stage of slime mou ld Physarum polycephalum , is a single cell, with thousands of diploid nuclei, formed when indi vidual flagellated cells o r amoebas of Physaru m polycephalu m swarm to geth er and fuse. The plasmodiu m is visible by naked eye. When plasmodium is placed on an appropriate substrate, the plasmodium propagates and search es for sources of nutrients (bacteria). When such sources are located and taken over, the plasmodium forms veins of protoplasm . The veins can branch, and eventually the plasmodium spans the sources of nutrients with a dynamic proximity graph, resembling, but not perfectly matching graphs from the family of k -skeletons [Kirkpatrick and Radk e, 198 5 ]. A large size of the plasmodium allows the single cell to be highly amorphous. The plasmodium shows synchronous oscillation of cytoplasm throu ghout its cell b ody, and o scillator y patterns control the behaviours of the cell. All the parts o f the cell behave cooperatively in exploring the space, searching for nutrients and optimizing network of streaming protoplasm. Due to its unique features and relativ e ease o f experimentati on with, the plasmodium became a test biological substrate for implementati on of various computational task s. The problems solved by the plasm odium include maze-solving [Nakagaki, 2000, 2001], calculation of efficient networks [Nakagaki 2003, 20 04; Shira kawa & Gunji, 2007], construction of logical gates [Tsuda et al, 2004], formation of Voronoi diagram [Shirakawa & Gunji, 2007a], and r obot control [Tsuda et al., 2007]. The oscillatory cytoplas m of the plasmodium can be seen as a spatially extended nonlinear excitable media [Matsu moto et al., 1988; Nakagaki et al., 1999; Yam ada et al., 2007]. In our previous papers we hypothesized that the plasmodium of Physarum is a biological analogue of a chemical reaction- diffusion system encapsulated in an elastic and growing membrane [Adamatzky, 2007a] . Such an encapsulation enables the plasmodium to function as a massively-parallel reaction-diffusion computer [Adamatzky, De Lacy Cos tello, Asai, 2005] and also to solve few tasks which re action-diffusion computers could not do, e.g. construction of spannin g trees [Adamatzky, 20 07], and implementation of Adamatzky A. Towards Physarum rob ots Feb 2008 storage modification machines [Adamatzky, 2008] . Also, under certain experimental conditions, the plasmodium exhibits travelling self-localizations, implements collision-based logical circuits and thus is capable for univers al computation [Ada matzky, De Lac y Costello, Shirak awa, 200 8] . Being encapsulated in an elastic membrane the plas modium can be capable of not only co mputing over spatially distributed data-sets but also physica lly manipulating elemen ts of the data-sets. If a sensible, controllable and, ideally, program mable movement of the plasmodium and manipulation by the plasmodium could be achieved, this would open way s for experimental implementati ons of amorphous robotic de vices. There are already seeds of an em erging theory of artificial amoeboid robots [Yokoi and Ka kazu, 1992; Yok oi et al., 200 3; Shimizu and Ishigu ro, 2008] . In present paper we under took a set of scoping experiments o n establishing links between Physarum computing and Physarum ro botics. We ha ve chosen water surface as a physical substrate for the plasmodium development to s tudy how to polog y of the plasmodium network can be dynamically updated, without being stuck to a non-liquid substrate, and h ow small objects floating o n the surface can be manipulated by the plasmodium’s pseud opodia. Methods Plasmodium of Physarum polycephalu m was cultivated on a wet paper towels in dark ventilated containers, oat flakes were supplied as a substrate for bacteria on which the plasmodium feeds. We used sev eral t est ar enas for observing behaviour o f the plasmodium an d sc oping experim ents o n plasmodium-induced manipulation of floating objects. These are Petri dish es with base diameters 20 mm and 90 mm, and rectang ular plastic containers 200 by 150 mm. The dishes and containers were filled by 1/3 with distilled water. D ata points, to be spanned by the plasmo diu m, were represented either by 5-10 mm sized pieces of a plastic foam , which were either fixed to bottom o f Petri dishes or left floating on water surface (in case of large containers). Oat flakes were placed on top of the foa m pieces. Foam piece s, where plas modium was initially placed, and the pieces with oat flakes were anchored to bottom of containers. Tiny foam pieces to be manipulated by plasmodium were left free - floating. Results: Comput ing and Ma nipulating To demonstrat e that a substrate is suitable for ro boti cs implemen tations one must demonstrate tha t the substrate is capable for sensing o f environment and responsiveness to ex ternal stimulus, solving complex computa tional tasks on spatially distribute d data sets, loco motion, and manipulation of objects. We provide basic demonstrati ons which may indicate that plasmodium of Physarum po lyc ephalum can be successfully used in future experiments on laboratory implementations of amorphous biological robots. Surface of water is in tension therefore it physica lly supports propagating plasmodium, when its contact weight to contact area ratio is small. When placed in an experimental container the plasmodium forms pseudopodia aimed to search for sources of nutrients. In most experi ments ‘growth part’ o f the pseudopodia has tree -like structure for fine detection of chemo-gradients in the medium, which also minimized weight to area ratio. Examples of tree -like propagating pseudopodia are shown in Fig. 1. In Fig. 1b we can see that not always p seudopodia grow towards source o f n utrients, there is a pseudopodia growing South- We st, where no sources of nutrients located. This happens possibly because in large-sized contain ers volume of air is too large to support a reliable a nd stationary gradien t of chemo-attractants. This m ay pose a difficulty for the plasmodium to locate and s pan all sources of nutrients in large-siz ed containers. In Petri dishes volume of air is small and, supposedly the air is stationary, therefore plasmodiu m easily locates sources of nutrients (Fig. 2). It thus builds spanning trees where graph nodes (to be spanned) Adamatzky A. Towards Physarum rob ots Feb 2008 are presented by pieces of foam with oat flakes on top. In Fi g. 2 we can see that origin ally th e plasmodium was positi oned at the Southern domain. In twelve hours the plas modium buil ds a link with Western domain, and then starts to propagate pseud opodia to the East ern domain . When the plasmodium sp ans so urces of nutrients, it produces many ‘redundan t’ branches (Fig. 2). These branches of pseudopodia are neces sary for space exploration but do not represent minimal edges connecting the nodes of the spanning tree. These ‘redundant’ branches are removed at later stages of the spanning tree development. See a well -e stablished spanning tree of data-points in Fig. 3. Initially the plasmodium was placed in the Western domain, and the plasmodium has co nstructed the spanning tree in 15 hours. We demonstrat ed that the plasmodiu m does explore space and computes a spann ing tree on the water surface, when placed initially on one o f the floating o bjects. Would the plasmodium be as well operational when placed just on the surface of the water? As we can see in Fig. 4 the plasmodiu m works perfectly. We placed a piece of plasmodium on bare surface of water (Fig. 4, start). In three hours the plasmodium forms an almost circular front of propagating pseudopodia, which reach two stationary domain s with oat reaches in eigh t hours (Fig . 4). In usual conditions (on a wet solid or gel substrate) edg es of spanning trees, pres ented by protoplasmi c tubes, adhere to the surface of the substrate [Nakagaki et al., 2003; Adamatzky, 2007, 2008]. Therefore the edges cannot move, and the only way the plasmodium can do a dynamical update is to make a protoplasmic tube inoperative and to form a new edge instead (membrane shell of the ceased link will remain on the substrate, e.g. see [Adamatzky, 2008]). When plasmodi um operates on wate r surface, cohesion between the water surface and membrane of protoplasmi c tubes is small enough for the protoplasmic tubes to move freely. Thus the plasmodium can make the tubes almost straight and thus minimize costs of the transfer and communicati on between its distan t parts. Two examples of the straightening of the protoplasmic tubes are shown in Fig. 5. Such straightening is a result of the tubes’ becoming shorter du e to contracti on. Presence o f a contraction may indicate that if two floating o bjects (bo th with sources of nutrients) are connected by a protoplasmic tube then the objects will be pulled together due to shortening of the protoplasmic tube. We did not manage to demonstra te this exact phenomenon of pulling two floating objects to gether, however we g ot e xperimental evidence of pu shing and pulling of single floating objects by the plasmodiu m’s pseudopodia. The plasmodiu m-induced pushin g and pulling are exemplified in Figs. 6 and 7. To demonstrate pushi ng we placed a very light-weight piece of plastic foam on the water surface nearby the plasmodium (Fig. 6, 0 hours). The plasmodium develops a pseudopodium which propagates towards the light-weight piece of foam (Fig. 6, 5 hours). Due to gravity force acting on the pseudopodi a a ripple is fo rmed on the water surface (Fig. 6 , 9 hours), which causes pushes the piece of foam away from the growing pseudopodia’s tip (Fig. 6, 13 hours). Due to absence o f any nutrients on the pushed piece of foam, the plas modium abandons it s attempt to occup y the piece and retr acts the pseudop odia (Fig. 6, 16 hours). The piece re mains stati onary: it bec ame shifted away from its origin al position. In the second example, Fig. 7, we observe pulling o f the light-weight o bject. The piece of foam to be pulled is placed between two anchored objects (Fig. 7, 0 hours). One o bject hosts the plasmodiu m another object has an oat flake on top (i.e. attracts the plasmodium). A pseu dopodium grows from the plas modiu m’s original location towards the site with the source of nutrients. The pseud opodium occupies the piece of foam (Fig. 7, 15 hours) and then continues its propagation towards the source of nutrients. When the source of nutrients is reached (Fig. 7, 22 hours) the protoplasmic tubes connecting two anchored objects contract and straighten thus causing the light -weight object to be pulled towards the source of nutrients (Fig. 7, 32 hours). The pushing and pulling capabilities of the plasmodium can be utilized in constructions of water-surface based distributed manipulators [Hosokawa et al. , 1996; Adamatzky et al., 2005]. Adamatzky A. Towards Physarum rob ots Feb 2008 Discussion Inspired by biomechanics of surface walking insects, see e.g. [McAlister, 1 959; Suter et al., 1997, Suter, 1999; Suter and Wildman, 1 999], o ur previous studies on implementation of computing tasks in the plasmodium [Adamatz ky, 2007, 2008], and our ideas on desig n and fabrication of biological amorph ous robots [Kennedy et al., 2001] we decided to explore operational capabiliti es of plasm odium of Physarum polycephalum on the wat er surface. We were interes ted to demonstrate that the plasmodium posses ses the essential features of distributed robotics devices : sensing, computing, locomotion and manipulati on. Why water surface? We h ave chosen water surface as an ex periment al subst rate becaus e ther e i s minimal friction and cohesions between the plasmodiu m’s pseud opodia and the surface, always near ideal humidity for the plasmodium, continuous removal of metabolites and ex cretions from th e plasmodium’s body and protoplasmic tubes, increases chances of achieving manipulation of objects by the plasmodiu m. We demonstrat ed experimentally that the plasmodiu m (1) senses data-objects represented by sources of nutrients, (2) calculates shortest path between the data-objects, and approximates spanning trees where the data-objects are nodes (in principle, a spanning tree o f slo wly moving data -objects can be calculated as well), (3) pushes and pulls light-weight objects placed on the water surface. The findings indicated that the plasmodium of Physarum polecephalum is a perspective candidate for the ro le of spatially extend ed robots i mplemented on bi ological substrates. Our experiment also show that Physarum im plem entation of Kolmogorov-Uspensky machine [Adamatzky, 2008] can be extend ed t o mecha nical version of the storage modification machine b y adding P USH NODE and P ULL NODE operations. To translocate nodes selectively in the storage structures we may need to assign certain attributes. This can be done by marking nodes with different species of colors; in [Adama tzky, 2008] we demonstrated that the plasm odium exhibits stro ng preferences to certain food colouring, is neutral to others, and that some food colouring s repel the plasmodium. Such preference hierarch y can be map ped onto the m obile data storage s tructure. More future experiments is required indeed to develop ideas derived from our scoping ex perim ents to the full working pr ototypes of the Physarum robots an d mechanical K olmogorov-Usp enski machines. References [Adamatzky, De Lacy Coste llo, Asai, 2005] Adamatzk y A., De Lacy Costello B., Asai T. Reactio n-Diffusion Computers. Else vier, 2005. [Adamatzky, 2007] Adam atzky A. Approximation of of spanning trees in plasmodium o f Physarum polycephalum. Kyberne tes (2007), in pres s. [Adamatzky, 2007a] Adamatzky A. Physarum machines: encapsulatin g reaction-diffusion to compute spanning tree. Naturwi sseschaften ( 2007). [Adamatzky, 2008] Adamatzky A. Physarum m achine: implementati on of a Kolmogorov -Uspensk y machine on a biol ogical substrate. Parallel Pr ocessing Letters 1 7 (2008). [Adamatzky, De Lacy Costello, Shirakawa, 2008] Adamatzky A., De Lacy Costello B., Shirakawa T. Universal computati on with limited resources: Belousov-Zhabotinsky and Physaru m computers. Int. J. Bifu rcation and Chao s (2008), in pr ess. [Hosokawa et al., 1996] Hosokawa K., Shimoyama I., M iura H. Two -dimensiona l m icro-self-assembl y using the surface tensi on of wat er. Sensors and Ac tuators A 57 (1996) 117-125. [Kennedy, Melhuish, Adamatzky, 2001] Kennedy B., Melhuish C. and Adamatzky A. (2001) Biologicall y Inspired Ro bots in In: Y. Bar-Cohen, Editor, Electroactive polymer (EAP) actuators -- Reality, Potential and chall enges. SPIE Press Adamatzky A. Towards Physarum rob ots Feb 2008 [Kirkpatrick and Radke, 1985 ] Ki r k p a t r i c k D. G . a n d Ra d ke J . D. A f r a me w o r k f or c o m p u t at i on al mo rp hol og y. I n : T ou ssa in t G . T., E d . , C omp ut ati on al G eo met ry ( N ort h- Hol la nd, 1 985 ) 217 - 248. [Matsumoto et al., 1988] M a ts u mo to , K ., Ue d a , T . , a nd Ko ba t ak e , Y . ( 19 8 8 ). R ev er sa l o f t he r mo ta xi s wi th o sc il l at o r y st i mu la t io n i n t he p la s mo di u m of Ph y sa r u m po ly c ep h a l um . J. T h eo r. Bi ol . 1 31 , 17 5 – 182. [McAlister, 1959] McAlister WH. 1 959. The diving and surface -walking behaviour of Do lomedes triton sexpunctatus (Araneid a: Pisaurid ae). Animal Beha v iour 8: 109-111. [Nakagaki et al., 1999] Nakagaki T., Yamada H., and Ito M. (1999). Reaction – diff usion – advection model for pattern formation of rhythmic contraction in a giant amo eboid cell of the Physarum plasmodium J. Theo r. Biol. , 197 , 497-5 06. [Nakagaki et al., 2000] Nakagaki T., Yamada H., and Toth A., Maze-solving by an amoeboid o rganism . Nature 407 (200 0) 470-470. [Nakagaki 2 001] Nakagaki T., Smart behavior o f true slime mo ld in a labyrinth. Research in Microbiology 152 (2001) 767-770. [Nakagaki et al 2001] Nakagaki T., Yamada H., and Toth A., Path finding by tube morphogenesis in an amoeboid organis m . Biophysical Ch em istry 92 (2001) 4 7- 52. [Nakagaki et al 2003] Na kagaki, T., Yamada, H., Hara, M. (2003). Smart networ k soluti o ns in an amoeboid organis m , Biophys. Chem. , 1 07 , 1- 5. [Nakagaki 2004] Nakagaki , T., Kobayashi, R., Nishiura, Y. and Ueda, T. (2004). Obtaining multiple separate food sources: beh avioural intelligence in the Physarum plasmodium, Proc. R. Soc. Lond. B , 271 , 2305-23 10 . [Shimizu and Ishiguro, 2008 ] Shimizu M. and Ishiguro A. Amoeboid locomotion having high fluidity by a mo dular rob o t. Int. J. Unco nventional Computing (2008), in pre ss. [Shirakawa & Gunji, 2007] Shirakawa, T., and Gunji, Y. -P. (2007). Emergence of morphological order in the network for mation of Physarum polyceph alum , Biophys. Chem ., 128 , 253-260. [Shirakawa & Gunji, 2007a] Shirakawa T. And Gunji Y. – P. Computation of Voronoi diagram and collision-free path using the Plasm o dium of Physarum polyceph alum. Int. J. Unconventiona l Computing (2007), in pr ess. [Adamatzky et al., 2005] Adamatzky A., De Lacy Costello B., Skachek S., Melhuish C. Manipulating planar shapes with a light-sensitive e xcitable medi um: computational studies of close-loop systems. Int. J. Bifu rcation an d Chaos 350 (2006) 20 1-209. [Suter and Wildman, 1999] Suter RB, Wildman H. 1999. Locomotion on the water surface: hydrodynamic constraints o n rowing velocity require a gait change. Journal o f Experi mental Biology 202: 27 7 1-2785. [Suter, 1999] Suter RB. 1999. Cheap transport f or fishing spiders: the physics of sailing o n the water surface. Journal of Ara chnology 27: 489-496. [Suter et al., 1 997] Suter RB, Rosenberg O, Loeb S, Wildman H, Long J Jr. 1997. Locomotion on the water surface: propulsive mechanisms of the fisher spider, Dolomedes trit on. Journal of Experimental Biol o gy 200: 2523 -2538. [Tsuda et al., 2004] Tsuda, S., Aono, M., and Gunji, Y.-P., Robust and emergent Physarum computin g. BioSystems 73 (2 004) 45 – 55. [Tsuda et al., 2007] Tsuda, S., Zauner, K. P. and Gunji, Y. P. Robot control with biological cell s. Biosystems , 87, ( 2007) 215-223 [Yokoi and Kakazu, 1992] Yokoi H. and Kakazu Y. Th eories and appli cations o f auto nomic machines based on the vibrating potential method, In: Proc. Int. Symp. Distributed Autonomous Rob otics Systems (1992) 31- 38 . [Yokoi et al., 2003] H. Yokoi, T. N agai, T. Ish ida, M. Fujii, and T. Ii da, Amoeba-like Robots in th e Perspective of Control Architecture and Morph ology/Materials, In: Hara F. and Pfeifer R. (Eds.) Morpho-Functional Machines: The New Species, Sp ringer-Verlag Tok yo , 2003, 99 – 1 29. Adamatzky A. Towards Physarum rob o ts Feb 2008 FIGURES a b Fig. 1. The plasm odium explores experimental arena by propagating tree -like ps eudopodia. Start 12 hours Fig. 2. Plasmodium build s links conn ect ing its origin al domain of r esidence with two new sites. Adamatzky A. Towards Physarum rob o ts Feb 2008 Fig. 3. Span ning tree of three points c onstructed by the plasmodium. Start 3 hours 5 hours 8 hours Fig. 4. Plasmodium starts its de v elopment o n the water surface and occupies tw o sources of nutrients. Adamatzky A. Towards Physarum rob o ts Feb 2008 a b (1 2 hours later) c d (12 hours la ter) Fig. 5 . Exam ples of straightening of p rotoplasmic tubes. In photographs (a) and (c) tubes are lo nger th an necessary. In photograph s (b) and (d) the tubes correspond to minimal shortest path between the sites they are connec ting. Adamatzky A. Towards Physarum rob o ts Feb 2008 Fig. 6. Photograph s demonstrate that the plasmodium can push light-weight flo at ing objects . The object to be push ed is indicated by white arr ow in the first phot ograph the seri es. Adamatzky A. Towards Physarum rob o ts Feb 2008 Fig. 7 . Photographs de mo nstrate that the plasm o dium can pull lightweight object. The object to be pulled is indicated b y w hite arrow in the first ph o togra ph.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment