2-Vector Spaces and Groupoids
This paper describes a relationship between essentially finite groupoids and 2-vector spaces. In particular, we show to construct 2-vector spaces of Vect-valued presheaves on such groupoids. We define 2-linear maps corresponding to functors between g…
Authors: Jeffrey C. Morton
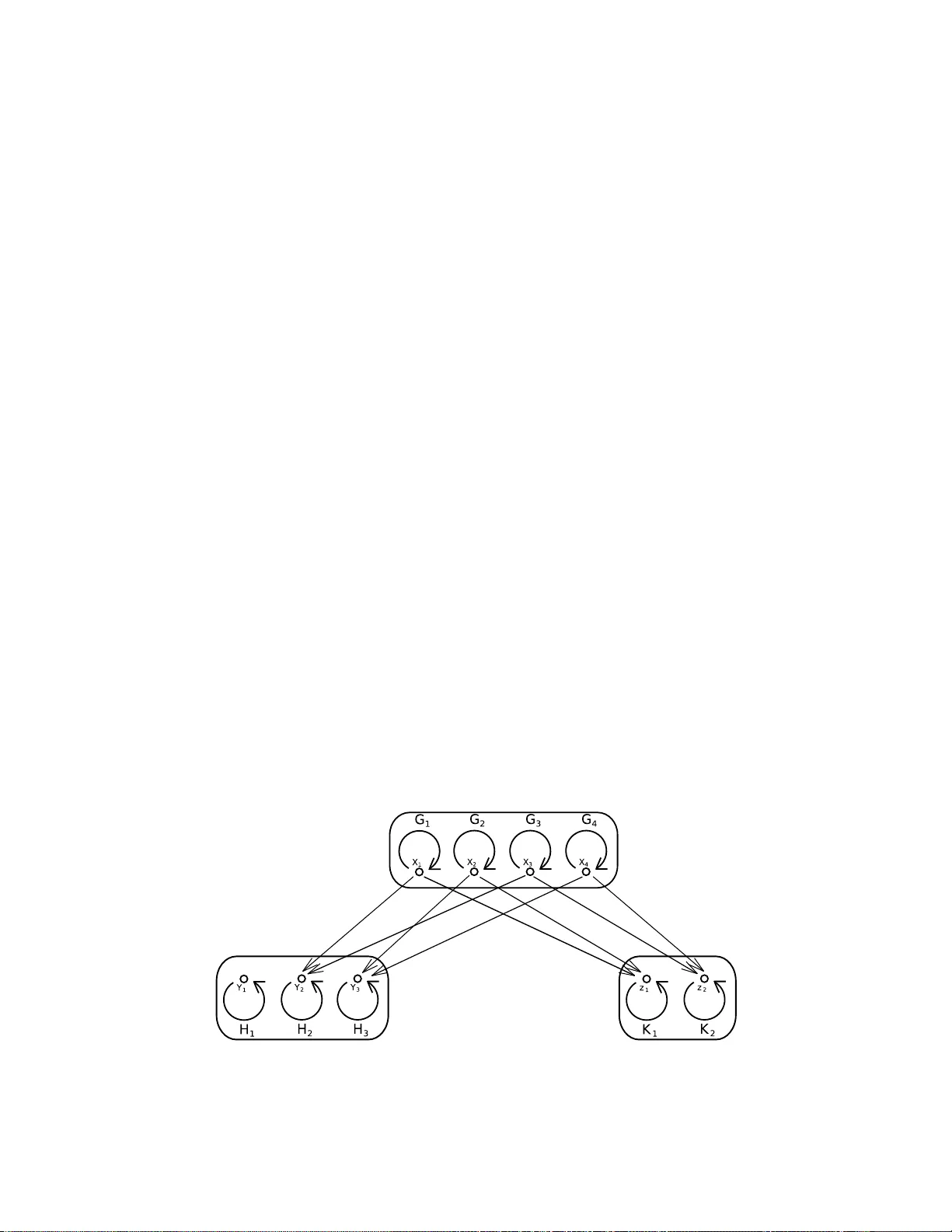
2-VECTOR SP A CES AND GR OUPOIDS JEFFREY C. MOR TON Abstract. This paper describ es a relationship betw een essent ially finite groupoids and 2-ve ctor spaces. In particular, we sho w to construct 2-ve ctor spaces of V ect - value d pr eshe aves on suc h group oids. W e define 2-li nea r m aps corre- sponding to functors betw een group oids in b oth a co v ariant and con trav arian t wa y , which are am bidextrous adjoints. This is used to construct a represen tation— a we ak functor—fr om Span( FinGpd ) (the bicategory of essent ially finite group oids and spans of group oids) into 2V ect . In this pap er we prov e this and give the construction in detail. 1. Introduction In this pa p er, I will describ e an extensio n of the gr oup oidific ation prog ram of Baez and Dolan [2]. Group oidification refers to the progr am of treating parts of linea r algebra as arising from spans of group oids (categories who se morphisms are all inv ertible) by a pro cess of “ degroupo idification”, which produce s complex vector spaces asso ciated to group oids, a nd linear ma ps a ssocia ted to spans. The extension descr ib ed her e sho ws a connection of the setting o f group oids and spans with 2-vector spaces and 2-linear maps , a categor ical analog of line a r alg ebra. (W e will as sume that all group oids are essentially finite - that is, equiv a le n t to finite group oids - although there is w ork in progre s s on how to extend thes e re sults to infinite gro upoids, and in particular Lie gro upoids.) A simple ex a mple of the group oidification pro gram ca n b e seen in terms of spans of finite sets (i.e. finite trivial gr o upoids). In that program, group oids give corres p onding v ector spaces a nd spa ns o f group oids g ive corresp onding linear maps. In particular, the s p ecial case of trivia l gro upoids (equiv alently , sets) giv es a useful illustration. Giv en a finite set S , there is a finite dimensional vector s pace L ( S ) consisting o f all complex linear combinations of elements o f S . Now, co nsider a span in Fi nSet : that is, a diagr am o f the form: (1) X s ~ ~ ~ ~ ~ ~ ~ ~ ~ t @ @ @ @ @ @ @ Y Z T o the span, there is a corresp onding to a linear map L ( X ) : L ( Y ) → L ( Z ), represented b y a matrix T who se ( i, j )-comp onent is | ( s, t ) − 1 ( y i , z j ) So the set in Figure 1 giv es ris e to the linear tra nsformation: y 1 7→ z 1 y 2 7→ z 1 + z 2 (2) y 3 7→ z 2 1 2 JEFFREY C. MOR TON Figure 1. A Span of Sets This makes sense for spans o f finite sets. Similarly , we will b e considering an analogo us constructio n for spans of essential ly finite group oids. There is a physical motiv ation here in quantum mechanics. If Y is the (discr ete) set of classical (pure) states of a system, then L ( Y ) = C [ Y ], the s pace of linear combinations of s ta tes in Y , is the Hilb ert spa c e of the corr esponding quantum mechanical system. (More generally , if Y is a measure space , one takes L 2 ( Y )). In the span, w e think of X as a set of “pro cesses” x , eac h with a designated “so urce” or starting state s ( x ) ∈ Y and “target” or ending state t ( x ) ∈ Z . Then the linear transformatio n descr ibed by the matrix T can b e seen in the following w ay , which we s hall generalize later on: Given a linear combination of elemen ts of Y (that is, a function f : Y → C ), transp ort f to X by “pulling back” alo ng s . That is, s ∗ f ( x ) = f ( s ( x )). Then “push forward” to Z by ta king the sum o ver all ele ments of X mapping down to a chosen o ne in Z : (3) t ∗ s ∗ f ( z ) = X t ( x )= z s ∗ f ( x ) This prec isely gives matrix m ultiplication b y the matrix describ ed ab o ve, and can clearly a lso be seen a s a “sum o ver histories”: the v alue of t ∗ s ∗ f ( z ) is a sum, o ver all histories x ending at z , o f the v alue of f at the s ource s ( x ). This illustra tes a contrast b et ween classical and quantu m pr o c esses . Classically , states succeed each other by exactly one pro cess. In the qua n tum picture, every p ossible pro cess contributes to evolution o f a state. In particular, there is a n interpretation of quantum pro cesses in terms of “matrix mechanics”, which takes a sum (in the for m of matrix m ultiplication) ov e r all his to ries joining fixed start and end states. This is exactly wha t is shown in our example. It is not to o difficult to chec k that the linearization of spa ns o f sets gets alo ng with comp osition, s o that the co mp osite of spans (b y pullback, giving a set of c omp osite p aths ) agrees with compos ition of linear maps. That is, that the pro cess is functorial . This fact makes it p ossible to think of catego rifying this proc e ss, in order to explicitly include symmetries of b oth states a nd histories as fundamental concepts. A ca tegorified v ersio n of this pro cess should b e a 2-functor. One wa y to g eneralize spans of s ets, which is seen in [2 ], uses gr oupoids (cate- gories whose mor phisms ar e all inv er tible) instead of sets. One reaso n to consider this is that it often happ ens that the config uration spa ce ca n natur a lly b e thoug ht of not as a set but as a g roupo id. This happ ens particularly when ther e ar e sym- metry op erations acting o n the set o f c onfigurations, and we explicitly repr e sen t 2-VECTOR SP AC ES AND GROUPOIDS 3 such symmetrie s as morphis ms of the g roupo id. The ex istence o f a gr oup action o n the set would be one example. In suc h a categ orified picture, X has o b jects which represent states of a system, and morphisms denoting symmetries of states. Then L gives vector spaces whic h are linear combinations of isomo rphism classes of obje cts of the group oids. The comp onents of the linea r maps uses g roupo id cardinality instead of set cardinality: L ( X ) [ y i ] , [ z k ] = X x ∈ ( s,t ) − 1 ( y i ,z k ) #(Aut( y i )) #(Aut( x )) (4) = | \ ( y i , z k ) | · #(Aut( y i )) where \ ( y i , z k ) is the essential pr eimage of y i and z k , a nd its c a rdinalit y is the group oid cardinality describ ed by B a ez and Dola n [4] (the o ther cardinality is the order of the group). This uses a weigh ting o f contributions fro m intermediate elements depe nding o n the size of their symmetry group. The g roupo id cardinality of a finite group oid X is: (5) | X | = X [ x ] ∈ X 1 # Aut( x ) where the c ardinalit y in the sum denotes the o rder of the gr oup. Here, ho wev er, w e w ant to do something a little different: this pro cess is still a functor, and we wan ted a 2-functor . Since we w ant to think of X as a category , rather than lo ok at functions from the ob jects of X into C , we sho uld lo ok at functors from X into some category whic h plays the ro le of C . In par ticular, this category will b e V ect , whose o b jects are v ector spaces over C , a nd whose mor phisms are linear maps. When categorifying, therefore, we will wan t to find an analo gous 2-functor, which requires sp ecifying more data. Then ther e will b e a “free 2-vector space” Λ( X ) of all functors from X into V ect . W e think o f the ob jects as “2-linear combinations” of classica l states, each with an internal state sp ac e w hich car ries a repres e ntation of the s ymmetry group of that state. F o r mos t physically rea listic systems, X would b e an infinite set with a mea s ure, and in fact a symplectic manifold. In g eneral, to deal w ith L 2 spaces in volves some issues in analy s is, such as the measure on X . Then instead of L ( X ) we consider L 2 ( X ). A similar c aveat should apply in the categor ified setting. Restricting to the s ituation of a finite gr oupoid helps to mor e c le arly illustrate so me of the purely ca tegory-theoretic asp ects of the “free 2-vector spac e ” constr uction. W e do exp ect that for w ell-b eha ved smo oth group oids, for example, similar res ults to those co nsidered in this pap er will hold, in volving infinite dimens io nal 2-vector spaces one c o uld denote 2 L 2 ( X ). But this will be addressed in a companion pap er. Finally , we re mark that this construction is used in the construction of an Ex- tended T op ological Quantum Field Theory (ETQ FT) in the author’s P h.D. thesis [15], where the group oids in question are top o logical inv ariants of manifolds. By analogy , it could be us ed to give “extended quantum theories ” in other settings where spans of group oids appear. Another view of a related pro cess inv olves the 2 -functor into additiv e catego ries (whic h, in the C -linear case, are the KV 2-vector spaces ) from a 2-catego ry Bim , whose ob jects ar e rings , mor phisms in hom Bim ( R, S ) are ( R , S )-bimo dules, and whose 2 -morphisms are bimo dule homomor phisms. This is a dual picture to that of 4 JEFFREY C. MOR TON spans. Indeed, the type of “pull-push” construction giv en here is ubiquitous (as its app earance in linear algebr a sugg ests), due to the universal prop erties of categ ories of spans (see [7]). Similar no tions also app ear in the theor y of Mack ey functor s (see [16]), and in the s tudy of “corres pondences” in noncommutativ e geometry , alge br aic geometry , and elsewhere. In this pa p er, we will b egin by descr ibing the source and target catego r ies, Span( FinGp d ) in s ection 2, and 2V ect in sectio n 3. In particular, to categor ify the functor L , we nee d a 2-c ategory to cor r espond to V ect , and this will b e the 2-catego ry of all Kapranov-V o evodsky 2-vector spaces. A KV 2 -v ector spa ce is an ab elian category with some extra s tructure, just as a v ector space is a sp ecial t y p e of ab elian group. In section 3 we give some background and collect some fundamen- tal results a bout them whic h are widely kno wn, but whose pro ofs a re seldo m given. F or exa mple, we show that 2-vector space s, understo od as a semisimple C -linear additive category , are all equiv a len t to V ect k for s ome nonnegative integer k . In s ection 4, we give the ob ject level of our construction fo r a 2-functor Λ, which, to (essen tially finite) group oids assigns KV 2- v ector spaces . Analogously with sets, we obtain 2-linea r maps for spans of gr oupoids. In fact, just a s with sets, this is a consequence of an even simpler corre spondence. Namely , there is the “pullback” and “ push-forward” of a function men tioned in the description of the linear map from a spa n of sets as a sum over histories (the sum o ccurs in the “push-forward” op eration, and corr e sponds to the s um in matrix multiplication). The group oid situation is more complicated than tha t fo r s ets, ho wev er, because of the existence of automorphisms of the ob jects, and the condition that maps b et w een gro upoids are functors. This means, in particular, that for ea c h ob ject x in a group oid, the functor determines a ho momorphism fro m the automorphism gr o up o f x to that of its imag e . The push-for w ard op eration can be interpreted as a Kan extensio n and has b oth an ob ject and a morphism level. Section 5 desc ribes how these res ults define 2-linear maps as sociated to s pans of gr oupoids. It beg ins with a brief discussion of the bicategory whos e ob jects a re group oids, whose morphisms are spans of g roupoids , and whose 2-mor phisms are span maps. This is follow ed by an explicit constr uction o f the mor phis m level of the 2-functor Λ : Span( Fi nGpd ) → 2V ect and s ho ws that it preserves co mposition o f spans in the w eak s ense: that is, up to a sp ecified isomorphism. (T echnical details of this pr oof are reserved for appendix A). Finally , using F rob enius recipro cit y , it describ es a simple e x plicit matrix representation for the 2-functor constructed. Section 6 then contin ues by describing how this re pr esen tation works at the lev el of 2-morphis ms. This is analogous to the 1 -morphism level, in that it co nsists of a “pullback a nd pushforward” pro cess. This is most easily des c r ibed in terms of the linear maps b et ween cor responding v ector spaces which a ppear in the ma trix rep- resentation of the 2 -linear ma ps a ssocia ted to a pa ir of spans fro m A to B . W e give this co nstruction and sho w it preserves b oth v ertical a nd horizontal comp osition of 2-morphisms in the appropria te wa ys. The res ults shown in sections 5 and 6 do muc h of the w ork involv ed in showing that our representation is re a lly a 2- functor. The remainder of this pro of is given in section 7. Now we begin to des cribe the 2-linea rization pr ocess by collecting some key facts ab out the bica teg ory of 2-vector spa c es, including a cano nical cons tr uction of one for each (essen tially finite) group oid. 2-VECTOR SP AC ES AND GROUPOIDS 5 2. The Bica tegor y Span( FinGp d ) The main pur p ose of this pap er is to des cribe a w eak 2-functor (6) Λ : Span( FinGp d ) → 2V ect In this sectio n, w e will describe the source bicategor y , Span( FinGp d ). First, the ob jects of Span( FinGp d ). Definition 2.0. 1. An essential ly finite gr oup oid is one which is e qu iva lent to a finite gr oup oid. A finitely gener ate d gr oup oid is one with a fin ite set of obje cts, and al l of whose morphisms ar e gener ate d u nder c omp osition by a finite set of morphisms. An essential l y finitely gener ate d gr oup oid is one which is e quivalent to a fin itely gener ate d one. Note that, in particular , essentially finitely generated g roupoids m ust be essen- tially finite, since every ob ject has an ident ity morphism. W e will use the ter m “essentially finite” to mean b oth of these conditions. Next we describe the mor - phisms of Spa n( Fi nGpd ). In any category C , a sp an is a diagram of the form: (7) X s ~ ~ } } } } } } } } t A A A A A A A A A 1 A 2 In particular, we wan t to repro duce the “ linearization” asso ciated to spa ns of sets which we discussed in the intro duction. The idea is tha t given a span of group oids, as in Figure 2 (which suppresses the homomor phisms labelling the strands in the span, but should be compared with Figure 1), there will b e a “tr ansfer” 2-linea r map from the KV 2 -v ector space a ssocia ted to the source of the span, to that asso ciated to the targ et. Figure 2. A Span of Group oids 6 JEFFREY C. MOR TON If C has pullbacks, w e can define composition of spans using them: (8) X ′ ◦ X S { { w w w w w w w w w T # # H H H H H H H H H X s ~ ~ } } } } } } } } t # # G G G G G G G G G X ′ s ′ { { w w w w w w w w w t ′ ! ! B B B B B B B B A 1 A 2 A 3 where we define X ′ ◦ X to be the ob ject, unique up to iso morphism, which makes the central square a pullback squar e. That is, it is a terminal o ccupant of this niche. If C is, in a dditio n, a co ncrete ca teg ory , the pullback is a sub ob ject of the pro duct X × X ′ . (9) X ′ ◦ X = X × A 2 X ′ = [ a ∈ A 2 t − 1 ( a ) × ( s ′ ) − 1 ( a ) the fibr ed pro duct of X ′ and X ov er A 2 . (Indeed, if C is Cartesia n, an y s pan can be factored through a pr oduct.) Now, for a ny categ ory C with pullbacks, ther e is a categ ory Span( C ) who se ob jects are the ob jects of C , and whose morphisms are isomorphism classe s spans in C c omposed by pullback. Here we are taking spans up to isomorphisms α : X 1 → X 2 which are commuting diagrams of the for m: (10) X 1 s 1 } } | | | | | | | | α t 1 ! ! B B B B B B B B A 1 X 2 s 2 o o t 2 / / A 2 How ever, we will do something slig h tly differen t. W e will be in terested in spans of gro upoids. Since gr o upoids na turally form a 2 -category , w e should w eaken the notion o f comp osition, and give an appropriate no tion of 2-morphism, for a bicat- egory Span( FinGp d ). Given an y 2-categ ory C with w eak pullbacks, one can ag ain for m a bicategory Span( C ) with the same ob jects as C and with spans for morphisms . T composite of spans A 1 s ← X t → A 2 and A 2 s ′ ← X ′ t ′ → A 3 is a n o b ject X ′ ◦ X together with a 2-morphism α ma king this diagr a m co mm ute, a nd terminal for such choices: (11) X ′ ◦ X S { { w w w w w w w w w T # # H H H H H H H H H s ◦ S t ′ ◦ T X s ~ ~ } } } } } } } } t # # G G G G G G G G G α ∼ + 3 X ′ s ′ { { w w w w w w w w w t ′ ! ! B B B B B B B B A 1 A 2 A 3 A 2-morphism in Span( C ) will be an isomorphism class of sp ans of sp an m ap s . That is, cons ider a span of 2-m orp hisms in the usual Span( C ). This is a diagr am 2-VECTOR SP AC ES AND GROUPOIDS 7 of the for m: (12) X 1 s 1 } } | | | | | | | | t 1 ! ! B B B B B B B B A 1 Y o o / / t s O O A 2 X 2 s 2 a a B B B B B B B B t 2 = = | | | | | | | | In principle we need only require this diag ram comm ute weakly: that is, there are isomorphisms ζ s : s 1 ◦ s → s 2 ◦ t and ζ t : t 1 ◦ s → t 2 ◦ t . F o r the mo st par t, since the c onstruction we mean to g iv e is inv a rian t under equiv alence of group oids, and taking the A i to be skeletal makes this str ict, w e will assume stric t commutativit y , though we sha ll indicate where the argument must b e changed to acc o mmodate the weak ca se. W e are co nsidering suc h diagr ams o nly up to isomorphism : that is, the inner span X 1 ← Y → X 2 in the 2-mo rphism 12 is o nly considered up to an isomor phism of spans in the sense of 10. The reason fo r co nsidering these is as follo ws. Fir st, taking a ca tegory C and passing to Span( C ) amounts to formally adjoining duals fo r morphisms in C . The dual of any span is the span whic h has the sa me maps, considered in the reverse orientation, exchanging the role o f s ource and targ et ob ject. When we apply Λ, these duals will in fact b ecome adjoints, as we shall see. Now, w e are interested in the case C = FinGp d , so the diagram for the com- po site of spans b et w een group oids co n ta ins a weak pullback squa r e: co mposition is only preserved up to isomor phism. In particula r, the ob jects are now gr oupoids, which are themselves categories with ob jects and mor phisms. Since it makes sense to sp eak of tw o ob jects of a group oid b eing isomor phic, the weak est meaningful condition is that o b jects of gro upoids X a nd X ′ should need only pr o ject to iso- morphic ob jects on A 2 . But there ar e p otentially differen t isomorphisms b et ween those ob jects. So the w eak pullback is a larger g r oupoid tha n a str ict pullback, since its o b jects come with a specified isomorphism b et ween the t wo restrictions. That this is a weak pullbac k squa re of functors b et ween group oids means that this diagr am comm utes up to the natura l is o morphism α : t ◦ S − → s ′ ◦ T . (The fact that α is iso is what makes this a we ak pullback rather than a lax pullba ck, where α is only a natural transformation.) This is an example of a c omma c ate gory (the concept, though not the na me, was intro duced by L awvere in his do ctoral thesis [12]). W e recall some ba c kground ab o ut this constr uctio n in Appendix A.1. Now, the pr ocess o f finding highe r mor phis ms by taking s pans of span maps could ob viously b e con tinued: each new level of s pan naturally gives maps of spans as morphisms. W e c ould repea t the pro cess of adjoining duals b y passing to spans of suc h span maps, and s o o n re cursiv ely as far as we wish. F or our purp oses here, how e ver, we will stop at 2 -morphisms for t wo rea sons. First, w e w ant to describ e a representation in to 2V ect , which is a 2- category . This in turn is s ince the ob jects of FinGp d a re themselves categories, and our 2-functor Λ will r epresen t them as categorie s - so a 2-categ ory is the natural setting for them. Collecting the definition together, we then hav e the fo llo wing. Definition 2.0. 2. The bic ate gory Span( FinGp d ) has: 8 JEFFREY C. MOR TON • Obje cts : Essent ially fi nite gr oup oids • Morphisms : Sp ans of gr oup oids, c omp ose d by we ak pul lb ack • 2-Morphisms : Isomorphism classes of sp ans of sp an maps, c omp ose d by we ak pul lb ack b oth horizontal ly and vertic al ly Having defined Span( FinGp d ), the source bicatego ry o f the 2-functor Λ w e aim to describ e here, we next desc r ibe its target, 2V ect . 3. Kapranov-V oevodsky 2-Vector Sp a ces There a re tw o ma jor philosophies regar ding how to categorify the concept “vector space”. A Baez-Crans (BC) 2-vector space is a ca tegory ob ject in V ect —that is, a category having a v ector spa ce of ob jects and of morphis ms , where so urce, target, comp osition, etc. are linear maps. This is a use ful concept for some purpose s—it was de velop ed to g iv e a ca tegorification of Lie algebra s . The rea de r may refer to the paper of Baez a nd Cra ns [3] for mor e details. How ever, a BC 2-vector space turns out to be equiv alent to a 2-term c hain complex and for many purpo ses this is to o strict. This is not the concept of 2-vector space which concerns us her e. The other, earlier, approach is to define a 2 -v ector space as a catego ry having op erations such as a monoidal structure analogous to the addition on a vector s pace. In particular, w e will res trict our atten tion to c omplex 2-vector spaces. This ambiguit y ab out the co rrect notio n of “ 2-v ector space” is typical of the problem of categorificatio n. Since the categorified setting has more lay ers of struc- ture, there is a c hoice of level to which the s tr ucture in the co ncept of a vector space should be lifted. Thus in the BC 2-vector spaces, we hav e literal v ector ad- dition a nd sca lar multiplication within the ob jects a nd morphisms. In K V 2-vector spaces and their cousins, we only ha ve this for mor phisms, and for ob jects there is a categorified analog o f additio n, in the sens e that they are additive catego ries. The key difference be t ween the t wo notions of 2-vector space lies in which catego ry plays the role of the “base field”: in the BC definition, this is the ring categ ory C [0] whose ob jects a re complex n um b ers, whereas for the KV definition it is V e ct , whose ob jects are complex vector spa c es. This is discussed by Josep Elgueta [8]. Indeed, E lgueta [8] shows several different t yp es of “g eneralized” 2- v ector spaces, and rela tionships among them. In pa rticular, while KV 2- v ector spaces can b e thought of as having a set of ba s is ele men ts, a g eneralized 2-vector space may hav e a ge ner al c ate gory of basis elemen ts. The free genera lized 2-vector space on a category is denoted V ect[ C ] . Then KV 2-vector spa ces arise when C is a discrete category with only identit y morphisms. This is essentially a set S of ob jects. Thus it s hould not be surprising that KV 2-vector spaces ha ve a structure analo gous to free vector spaces genera ted by some finite set - which are isomor phic to C k . 3.1. Definition. The s ta ndard example of this approach is the K apranov-V o ev o dsky (KV) definition of a 2-vector space [1 0], whic h is the form we shall use (at least when the situation is finite-dimensio nal). T o motiv ate the K V definition, consider the idea that, in categorifying , one sho uld replace the bas e field C with a monoidal category . Sp ecifically , it turns out, with V ect , the ca tegory of finite dimensio nal complex vector spaces. This leads to the following replacements for concepts in elementary line a r algebra: • V ector s = k -tuples of scala rs 7→ 2-vectors = k - tuples of vector spaces • Addition 7→ Direct Sum 2-VECTOR SP AC ES AND GROUPOIDS 9 • Multiplication 7→ T ensor Pr oduct So just as C k is the standard example of a complex v ector space, V ect k will b e the standard example of a 2-vector space. But we should define these precisely . T o b egin with, a KV 2-vector space is a C -linear additive catego ry with some prop erties, so we be g in b y e xplaining this. The pr operty of additivity for categor ies, is here s een a s the analo g of the gro up str ucture of a vector space, though additivity in a category is s o mewhat different. The motiv a ting exa mple for us is the dir e ct sum op eration in V ect . Such an oper ation plays the role in a 2-vector space which vector addition pla ys in a vector s pace. Definition 3.1.1. If a c ate gory C is enriche d in ab elian gr oups, a bipr o duct is an op er ation giving, for any obje cts x and y in C an obje ct x ⊕ y e quipp e d with morphisms ι x , ι y fr om x and y r esp e ctively into x ⊕ y ; and morphisms π x , π y fr om x ⊕ y into x and y r esp e ctively, which satisfy t he bipr o duct r elations: (13) π x ◦ ι x = id x and π y ◦ ι y = id y and (14) ι x ◦ π x + ι y ◦ π y = id x ⊕ y Whenever biproducts exist, they ar e alw ays b oth pro ducts a nd copro ducts. Definition 3.1 .2. A C -li ne ar additive c ate gory is a c ate gory V enriche d in V ect (i.e. ∀ x, y ∈ V , hom( x, y ) is a ve ctor sp ac e over C ), such that c omp osition is a biline ar m ap , and such that V has a zer o obje ct (i.e. 0 which is b oth initial and terminal). A C -line ar functor b etwe en C -line ar c ate gories is one wher e morphism maps ar e C -line ar. A simple obje ct in V is x ∈ V such that hom( x, x ) ∼ = C . As imp ortant fact ab out KV 2- v ector spaces is that they hav e (finite) bases: they are g e nerated b y finitely man y simple o b jects. Definition 3.1. 3. A Kapr anov–V o evo dsky 2-ve ctor sp ac e is a C -line ar addi- tive c ate gory which is semisimple (every obje ct c an b e written as a finite bipr o duct of simple obj e ct s). A 2-line ar map b etwe en 2-ve ctor sp ac es is a C -line ar functor. Remark 3 . 1.4. It is a c onsequence of C - linearit y that a 2-linear ma p also pr e - serves bipro ducts, since the images of the π and ι maps still satisfy the definition of a bipro duct (and the universal pr o perties for product and copro duct follow a u- tomatically). The ab ov e definition of a 2- linear ma p is so metimes given in the equiv alent form requiring that the functor preser v e exact sequences. Indeed, since every ob ject is a finite bipro duct of simple ob jects, a 2- v ector space is an ab elian category . (See e.g. F reyd [9].) Example 3.1.5. The standard e x ample [1 0] of a K V 2-vector space highlights the analogy with the familiar v ector space C k . The 2-vector spac e V ect k is a category whose ob jects are k -tuples of vector spa ces, maps a re k -tuples o f linear maps. The additive str ucture of the 2 -v ector space V ect k comes from applying the direct s um in V ect component-wise. Note that there is a n equiv a len t of sc alar multiplic ation , using the tensor pro duct: (15) V ⊗ V 1 . . . V k = V ⊗ V 1 . . . V ⊗ V k 10 JEFFREY C. MOR TON and (16) V 1 . . . V k ⊕ W 1 . . . W k = V 1 ⊕ W 1 . . . V k ⊕ W k As the corresp ondence with linear algebra would s ug gest, 2- linear maps T : V ect k → V ect l amount to k × l matrices of vector spaces, acting by matrix m ulti- plication using the direct sum and tensor pro duct instead of o perations in C : (17) T 1 , 1 . . . T 1 ,k . . . . . . T l, 1 . . . T l,k V 1 . . . V k = L k i =1 T 1 ,i ⊗ V i . . . L k i =1 T l,i ⊗ V i The natural tra ns formations b et w een these ar e matrices of linear transfor ma- tions: (18) α = α 1 , 1 . . . α 1 ,k . . . . . . α l, 1 . . . α l,k : T 1 , 1 . . . T 1 ,k . . . . . . T l, 1 . . . T l,k − → T ′ 1 , 1 . . . T ′ 1 ,k . . . . . . T ′ l, 1 . . . T ′ l,k where each α i,j : T i,j → T ′ i,j is a linear map in the usual sense. These natural transformations give 2-morphisms b et ween 2 -linear maps, so that V ect k is a bicateg o ry with these as 2-cells: (19) V ect k F & & G 8 8 V ect l α In our example ab ov e, the finite set o f simple ob jects of which every ob ject is a sum is the set of 2-vectors of the fo rm (20) 0 . . . C . . . 0 which hav e the zero v ector space in all co mponents ex cept one (which can be ar bi- trary). W e can call these standar d b asis 2-ve ctors . Clear ly ev ery ob ject o f V ect k is a finite bipro duct of these ob jects, and each is simple (its v ector space of endo- morphisms is 1 -dimensional). 3.2. Classification Theorems. The mo st immediately useful fact a bout KV 2- vector spaces is the following well kno wn characterizatio n: Theorem 3.2. 1. Every KV 2-ve ct or s p ac e is e qu iva lent as a c ate gory to V ect k for some k ∈ N . Pr o of. Supp ose K is a KV 2-vector s pa ce with a basis of simple ob jects X 1 . . . X k . Then we construct an equiv alence E : K → V ect k as follows: 2-VECTOR SP AC ES AND GROUPOIDS 11 E sho uld b e an additive functor with E ( X i ) = V i , where V i is the k -tuple of vector spaces having the zero v ector space in every p osition except the i th , which has a co p y of C . But a ny o b ject X , is a s um L i X n i i , s o b y linearity (i.e. the fact tha t E pres erv es bipro ducts) X will b e sent to the sum of the same n umber of copies of the V i , which is just a k -tuple of vector spaces whose i th comp onen t is C n i . So ev ery ob ject in K is sen t to an k -tuple of v ector spaces. By C -linearity , and the fact that hom-vector spaces of simple ob jects a re o ne-dimensional, this determines the images of all morphisms. But then the w eak inv erse o f E is ea sy to constr uct, since sending V i to X i gives an in verse at the level o f ob jects, by the same linearity a rgumen t as ab o ve. At the level of morphisms, the sa me argument ho lds again. This is a higher a nalog of the fact that every finite dimensional c o mplex vector space is isomo rphic to C k for some k ∈ N . So, indeed, the characterizatio n o f 2- vector spaces in our exa mple a b ov e is g e neric: every KV 2-vector space is eq uiv a len t to one of the for m giv en. Moreover, our picture o f 2 -linear maps is also gener ic, a s shown by this ar gumen t, a nalogous to the linear algebra ar gumen t for r epresen tation of linear maps b y matric e s: Lemma 3.2. 2. A ny 2-line ar map T : V ect n → V ect m is natur al ly isomorph ic to a map of the form (17). Pr o of. Any 2-linear map T is a C -linear additiv e functor b et ween 2-vector spaces. Since any ob ject in a 2-vector space can b e represented as a bipro duct of simple ob jects—a nd morphisms likewise—such a functor is completely determined by its effect on the basis of simple o b jects and mo r phisms betw een them. But then note that since the a utomorphism gro up of a s imple ob ject is by defini- tion just all (complex) multiples of the identit y morphism, there is no choice ab out where to send any s uch morphism. So a functor is completely determined by the images o f the bas is ob jects, namely the 2-vectors V i = (0 , . . . , C , . . . , 0) ∈ V ect n , where V i has only the i th ent ry no n-zero. On the other hand, for any i , T ( V i ) is a dir ect sum of some simple ob jects in V ect m , which is just some 2-vector, namely a k -tuple of vector spaces. Then the fact that the functor is additive means that it has exac tly the form given. And finally , the analog o us fact holds for natural transformatio ns b et ween 2-linea r maps: Lemma 3.2.3. Any n atur al tr ansformation α : T → T ′ fr om a 2-line ar map T : V ect n → V ect m to a 2-line ar map T ′ : V ect n → V ect m , b oth in the form (17) is of the form (18). Pr o of. By Lemma 3.2 .2, the 2 -linear maps T and T ′ can b e r epresen ted as matrices of vector spaces, whic h ac t on an ob ject in V ect n as in (17). A natur a l tr ansfor- mation α b et ween these should a ssign, to every ob ject X ∈ V ect n , a morphism α X : T ( X ) → T ′ ( X ) in V ect m , suc h that the usual naturality sq uare commutes for every morphism f : X → Y in V ect n . Suppo se X is the n -tuple ( X 1 , . . . , X n ), wher e the X i are finite dimensional vector spaces. Then (21) T ( X ) = ( ⊕ n k =1 V 1 ,k ⊗ X k , . . . , ⊕ n k =1 V m,k ⊗ X k ) 12 JEFFREY C. MOR TON where the V i,j are the components of T , and s imilarly (22) T ′ ( X ) = ( ⊕ n k =1 V ′ 1 ,k ⊗ X k , . . . , ⊕ n k =1 V ′ m,k ⊗ X k ) where the V ′ i,j are the components of T ′ . Then a mo rphism α X : T ( X ) → T ′ ( X ) consists of an m -tuple of linear maps: (23) α j : ⊕ n k =1 V j,k ⊗ X k → ⊕ n k =1 V ′ j,k ⊗ X k but b y the universal pr operty of the bipro duct, this is the sa me as having an ( n × m )-indexed set of maps (24) α j k : V j,k ⊗ X k → ⊕ n r =1 V ′ j,r ⊗ X r and b y the dual universal prop erty , this is the same as having ( n × n × m )-indexed maps (25) α j kr : V j,k ⊗ X k → V ′ j,r ⊗ X r How ever, w e must hav e the naturality co ndition for every morphism f : X → X ′ : (26) T ( X ) α X T ( f ) / / T ( X ′ ) α X ′ T ′ ( X ) T ′ ( f ) / / T ′ ( X ′ ) Note that each of the arrows in this diagra m is a mor phism in V ect m , which are linear maps in ea c h comp onen t—so in fa ct we hav e a sepa rate natur alit y square for each co mp onent. Also, since T and T ′ act on X a nd X ′ by tensoring with fixed vector s paces as in (21 ), one has T ( f ) i = ⊕ j 1 V ij ⊗ f j , ha ving no effect on the V ij . W e wan t to show that the comp onents of α affect only the V ij . Additivit y o f all the functor s in volv ed implies that the assignment α of ma ps to ob jects in V ect n is additive. So cons ider the ca se when X is one of the standard basis 2 -v ectors, having C in one p osition (say , the k th ), a nd the zer o vector spac e in every other positio n. Then, restr icting to the na turalit y square in the k th po sition, the ab ov e conditio n amoun ts to ha ving m maps (index e d b y j ): (27) α j,k : V j,k → V ′ j,k So by linearity , a na tural tra nsformation is de ter mined by a n n × m matrix of maps as in (18). The fact that 2 -linear maps b et ween 2-vector spaces are functors b et ween cat- egories recalls the analo gy betw een linear algebra and ca teg ory theory in the co n- cept of an adjoint . If V and W are inner pro duct spa ces, the adjoin t of a linear map F : V → W is a map F † for which h F x, y i = x, F † y for all x ∈ V 1 and y ∈ V 2 . A (r igh t) adjoint of a functor F : C → D is a functor G : D → C for which hom D ( F x, y ) ∼ = hom C ( x, Gy ) (and then F is a left adjoint of G ). In the situation of a K V 2-vector space, the categ orified ana log of the adjoint of a linear map is indeed an adjoint functor. (Note that since a K V 2 - v ector space ha s a sp ecified basis of simple ob jects, it makes sense to compare it to a n inner pro duct space.) Moreov er, the adjoint of a functor has a matr ix representation which is m uch lik e the ma trix representation of the adjoin t o f a linear map. W e summarize 2-VECTOR SP AC ES AND GROUPOIDS 13 this in the following (a v a rian t of prop osition 25 in [1], shown there for 2- Hilb ert spaces): Theorem 3.2.4. Given any 2-line ar map F : V → W , ther e is a 2-line ar map F † : W → V which is b oth a left and right ad joint to F . Pr o of. By The o rem 3.2.1, w e hav e V ≃ V ect n and W ≃ V ect m for so me n and m . By co mposition with these equiv alences , we can r estrict to this ca se. But then we hav e by Lemma 3.2.2 tha t F is naturally isomorphic to some 2-linear ma p giv en by matrix multiplication b y some matrix of vector spaces [ F i,j ]: (28) F 1 , 1 . . . F 1 ,n . . . . . . F m, 1 . . . F m,n W e claim that a (t wo-sided) adjoint functor F † is giv en by the “dual transp ose matrix” of vector spaces [ F i,j ] † : (29) F † 1 , 1 . . . F † 1 ,m . . . . . . F † n, 1 . . . F † n,m where F † i,j is the vector space dual ( F j,i ) ∗ (note the transpo sition of the matrix). W e note that this prescription is symmetric, since [ T ] †† = [ T ], so if F † is alwa y s a left a djoin t o f F , then F is also a left-a djo int o f F † , hence F † a right adjoin t of F . So if this pr e scription gives a left adjoin t, it gives a tw o -sided a djoin t. Next we chec k that it do es. Suppo se x = ( X i ) ∈ V ect n is the 2-vector with vector s pace X i in the i th comp onen t, a nd y = ( Y j ) ∈ V ect m has vector s pace Y j in the j th comp onen t. Then F ( x ) ∈ V ect m has j th comp onen t ⊕ n i =1 F i,j ⊗ X i . No w, a map in V ect m from F ( x ) to y consists of a linear map in each comp onent, so it is an m -tuple of maps: (30) f j : n M i =1 F i,j ⊗ X i → Y j for j = 1 . . . m . B ut since the direct sum (bipro duct) is a categorical copro duct, this is the same as an m × n matrix o f maps: (31) f ij : V i,j ⊗ X i → Y j for k = 1 . . . n and j = 1 . . . m , and ho m( F ( x ) , y ) is the vector space o f a ll suc h maps. By the sa me a rgumen t, a map in V ect n from x to F † ( y ) consists of an n × m matrix of maps: (32) g j i : X i → V ∗ j,i ⊗ Y j ∼ = hom( V j,i , Y j ) for i = 1 . . . n and j = 1 . . . m , and hom( x, F † ( y )) is the v ector space of all such maps. But then we hav e a natural isomorphism ho m ( F ( x ) , y ) ∼ = hom( x, F † ( y )) b y the duality of hom and ⊗ , so in fact F † is a right adjoint for F , a nd by the ab ov e argument, a lso a left adjoint. 14 JEFFREY C. MOR TON Moreov er, no other non-is omorphic ma trix defines a 2-linear map with these prop erties, and since any functor is natura lly isomorphic to some matrix, this is the sole F † which works. 3.3. Example: Group 2- Algebra. W e conclude this section b y giving an exam- ple of a 2-v ector spac e : Example 3.3. 1. As an example o f a KV 2- vector spa ce, c onsider the gr oup 2- algebr a on a finite gr o up G , defined by a nalogy with the g roup algebra: The gro up a lg ebra C [ G ] consists of the set of ele ments formed as forma l linea r combinations elemen ts of G : (33) b = X g ∈ G b g · g where all but finitely many b g are zero . W e ca n think of thes e a s complex functions on G . The algebra multip lication o n C [ G ] is given by the m ultiplication in G : (34) b ⋆ b ′ = X g,g ′ ∈ G ( b g b ′ g ′ ) · g g ′ This do es not corr espond to the m ultiplication of functions on G , but to c onvolution : (35) ( b ⋆ b ′ ) g = X h · h ′ = g b h b ′ h ′ Similarly , the gr oup 2-algebr a A = V ect [ G ] is the c ate gory o f G -graded vector spaces. That is, direct sums o f v ector spaces a ssocia ted to elemen ts of G : (36) V = M g ∈ G V g where V g ∈ V ect is a v ector spa ce. This is a G -gr aded vector space. W e can take direct sums of these p oin twise, so that ( V ⊕ V ′ ) g = V g ⊕ V ′ g ), and there is a “ s calar” pro duct w ith element s of V ect giv en by ( W ⊗ V ) g = W ⊗ V g . There is als o a gr oup 2-algebr a pro duct of G -g raded vector spaces, inv o lving a con volution on G : (37) ( V ⋆ V ′ ) h = M g · g ′ = h V g ⊗ V ′ g ′ The category of G - graded vector spa ces is clearly a KV 2-v ector space, since it is equiv alent to V ect k where k = | G | . How ever, it has the additional structure of a 2-alg ebra b ecause of the group op eration on the finite set G . Example 3. 3.2. Given a finite g roup G , the catego ry Rep(G) has: • Ob jects : Co mplex repr e s en tations of G (i.e. functors ρ : G → V ect , where G is seen as a one- o b ject group oid) • Morphism s : Intert wining ope rators betw een reps (i.e. natural transfor- mations) This is clea rly a 2-vector s pace generated b y the irr educible representations of G . In the next section, w e will see that a similar cons truction shows that the rep- resentation categories of finite group oids are KV 2- v ector space s. This will be the beg inning of our definition of Λ. This highligh ts o ne motiv ation for thinking of 2-vector s paces: the fact that, in quantum mechanics, one o ften “qua n tizes” a classical sy stem by taking the Hilb ert 2-VECTOR SP AC ES AND GROUPOIDS 15 space of (squa r e in tegrable) C -v a lued functions on its phase space. Similarly , one approach to finding a higher-ca tegorical version of a q uan tum theory is to take V ect -v alued functor s , as we discuss in mor e detail in Section 4. By restricting our attention to the (es sen tially) finite case, w e av oid her e the analytical issues involv ed in finding a n analog for L 2 ( X ). 4. KV 2-Vector Sp aces a n d Finite Groupoids W e hav e now seen that we ca n get a 2-vector space as a category o f functions from some finite se t S into V ect , and this may have extra structure if S do es. How ever, this is somewhat unnatural, since V ect is a ca tegory a nd S a mere set. It see ms more natural to consider functor categories into V ect from some categor y C . These are examples o f the genera liz ed 2-vector spaces descr ibed by Elgueta [8]. Then the ab o ve wa y of lo oking at a K V 2- v ector space can be r educed to the situation when C is a discrete categ ory with a finite set of ob jects. Howev er, there are interesting cases where C is not of this for m, and the res ult is still a KV v ector space. A relev ant class of examples, a s we shall show, come from sp ecial kinds of group oids. 4.1. F ree 2-V ector Space on a Finite Group oid. Since w e wan t o ur 2- v ector spaces to hav e finitely many genera to rs, we nee d a condition on the sorts o f g roupoids we a re talking ab out her e. Of c ourse, since o ften one works with top ological group oids whic h may be uncountable, the kind of finiteness condition w e will hav e to apply seems r estrictiv e. A full treatment of, fo r exa mple, Lie group oids, w ould require muc h more cons ide r ation of infinite dimensional 2-vector spaces (and in- deed 2-Hilb ert spaces ). In the meantime, we can only consider g roupo ids whic h a re essentially finite. W e first show that ess en tially finite gro upoids are among the sp ecial categor ies C we w ant to consider: Lemma 4.1.1. I f X is an essent ially finite gr oup oid, Rep(X) = [ X , V ect ] is a 2-ve ctor sp ac e Pr o of. The g r oupoid X is equiv alent its sk eleton, X , whic h contains a single ob ject in each isomor phism class. Since X is essentially finite, this is a finite set o f ob jects, and each ob ject has a finite gr o up of endomorphisms. So (38) X ≃ a x ∈ X Aut ( x ) where the g roups Aut ( x ) are seen a s one-ob ject g roupoids. Then [ X , V ect ] ≃ Y x ∈ X [ Aut ( x ) , V e ct ] (39) = Y x ∈ X Rep ( Aut ( x )) (40) This inher its the bipro ducts fro m the categ ories R ep ( Aut ( x )). An irr e ducible representation of a n essentially finite group oid amounts to a choice of isomorphism class of o b jects [ x ], and an irreducible repr esen tation o f the gro up Au t ( x ) . By Sch ur’s Lemma, these are indeed simple ob jects, since irr educible representations of a gro up are simple. 16 JEFFREY C. MOR TON W e notice that we a re sp eaking her e o f gr o upoids, and any gr oupoid X is equiv- alent to its opp osite categor y X op , b y an equiv alence that leaves ob jects in tact and replaces each morphism by its in verse. So there is no real difference b etw een [ X , V ect ], the category of V e ct -v a lued functor s from X , and [ X op , V ect ], the cate- gory of V ect -value d pr eshe aves (or just “ V ect -presheav es”) on X . (W e also sho uld note that, since our gr oupoids are discrete, there is no dis tinctio n her e b et ween sheav es and presheaves). Figure 3 is an illustration o f an ob ject in [ X , V ect ]. Figure 3. A V ect -v alued Pres heaf on X W e will use the terminolog y of “presheaves” for ob jects of [ X , V e ct ] for the sake of hig hligh ting the connection betw een these results and the usual facts about presheav es of sets in top os theory - whic h aga in r aises questions a bout to pologic a lly int eresting gro upoids. This will b e addre s sed in la ter work, but for now we consider the alge br aic as p ect of the 2-linearizatio n cons tr uction b y itself. 4.2. The Am bidextrous Adjunction. Now we wan t to hig hligh t a result analo- gous to a standard result for set-v a lued presheaves (see, e.g. MacLane and Mo erdijk [14], Theo rem 1.9 .2). This is that functors betw e en group oids induce 2-linear ma ps betw een the 2-vector spaces of V ect -pr e shea ves on them. F or Set -pr e shea ves, there will be a le ft and a r igh t adjoint to this functor. F or V ect -presheaves, these coin- cide, as w e hav e seen in Theorem 3.2.4 (an inspectio n of the pr oof shows that this is essentially b ecause a finite dimensional v ector space V is natura lly iso morphic to its double dual V †† , while the ana logous statement is false for sets). Th us, one says that the “pushforward” map is a n ambidextr ous adjoint for the pullbac k. F or m uch more o n am bidextrous adjunctions and their r elation to TQ FTs , see Lauda [11]). This is one imp ortant motiv ation for the present work. W e summarize the statement a s follows. Prop osition 4.2. 1. If X and Y ar e essential ly finite gr oup oids, a functor f : Y → X gives two 2-line ar maps b etwe en KV 2-ve ctor sp ac es: (41) f ∗ : [ X , V ect ] → [ Y , V ect ] 2-VECTOR SP AC ES AND GROUPOIDS 17 c al le d “pul lb ack along f ” and (42) f ∗ : [ Y , V ect ] → [ X , V ect ] the (two-side d) adjoi nt to f ∗ , c al le d “pu s hf orwar d along f ” Pr o of. F o r an y functor F : X → V ect , (43) f ∗ ( F ) = F ◦ f which is a functor from Y to V ect , the pullbac k of F along f . T o see that this is a 2-linear map, we recall that it is enough to show it is C -linea r , since then biproducts will automatically be prese rv ed. B ut a linear com bination of maps in some hom-catego ry in [ X , V ect ] is tak en by f ∗ to the corresp onding linear combination in the hom-categ o ry in [ Y , V ect ], where maps a re now b et ween vector spaces thought of ov er y ∈ Y . So indeed ther e is a 2-linear map f ∗ . But then by Theor em 3.2.4, there is a t wo-sided adjoin t of f ∗ , denoted f ∗ . Figure 4. A F unctor F : Y → X Betw een Gro upoids In Figure 4, w e see the essen tial informatio n co n tained in a functor o f gr oupoids. An y group oid is equiv alent to a skeletal one (that is, one with just one ob ject in each iso morphism class), so we illustra te this case. A skeletal g roupo id ca n be seen as a set of ob jects, each lab elled by a gro up. A functor b et ween group oids is a set map, where each “strand” of the set map (i.e. each pa ir ( y i , x j ) of so urce a nd image under the map) is lab elled by a homomorphism f i . This takes the group G i of automorphisms of the source y i to the group H j of automorphisms of the target x j . It will be useful to hav e a nother, more explicit, wa y to des cribe the “pushfor- ward” map than the matrix- dep endent view of Theorem 3.2.4. F ortunately , there is a more in trinsic wa y to descr ibe the 2 -linear map f ∗ , the adjoint of f ∗ . Definition 4.2.2 . F or a given x ∈ X , the c omma c ate gory ( f ↓ x ) has obje cts which ar e obje cts y ∈ Y e quipp e d with maps f ( y ) → x in X , and morphisms which 18 JEFFREY C. MOR TON ar e morphisms a : y → y ′ whose images make t he triangles (44) f ( y ) f ( a ) / / f ( y ′ ) { { w w w w w w w w w x in X c ommute. Given a V ect -pr eshe af G on Y , define f ∗ ( G )( x ) = co lim G ( f ↓ x ) — a c olimit in V ect . The pushforwar d of a morphism b : x → x ′ in X , f ∗ ( G )( b ) : f ∗ ( G )( x ) → f ∗ ( G )( x ′ ) is the induc e d morphism. The co mma c ategory is the appropriate categor ical equiv alent of a pr eimage — rather than r equiring f ( y ) = x , one acce pts that they may be isomorphic, in dif- ferent ways. So this colimit is a categor ified equiv alent of taking a sum ov er a preimage. The r esult is the Kan extension of G along f . Consider the effect of f ∗ on a 2- v ector G : Y → V ect by des cribing f ∗ G : X → V ect . If F : X → V ect is as above, there s ho uld b e a canonica l isomor- phism b et ween [ G, f ∗ ( F )] (a hom-set in [ Y , V ect ]) a nd [ p ∗ ( G ) , F ] (a hom-set in [ X , V ect ]). The hom-s et [ G, f ∗ ( F )] is found by first taking the pullback of F a long f . This gives a pr e sheaf on Y , na mely F ( f ( − )). The hom-set is then the set of na tural transformatio ns α : G → f ∗ F . G iven a n ob ject y in Y , α picks a linear map α y : F ( f ( y )) → G ( y ) sub ject to the naturality condition. Now, we hav e seen that, given f : Y → X , this f ∗ : [ Y , V ect ] → [ X , V ect ] is a 2-linear map, and an ambidextrous adjoint for f ∗ . W e w ould lik e to descr ibe f ∗ more explicitly . W e shall w ant to make use of the units and counits from b oth the adjunction in whic h f ∗ is a left adjoint, and that in which it is a right adjoint . These are described in the next sec tion. T o describ e f ∗ in more detail, we use the fact that both Y and X a re equiv alent to unions of finite g roups, and so a V ect -preshea f on Y is a functor which assigns a repre s en tation of Aut ( y ) to each ob ject y ∈ Y . F urthermore, if Y and X ar e skeletal, then f : Y → X o n ob jects can b e any set map, taking ob jects in Y to ob jects in X . F or morphisms, f gives, for each ob ject y ∈ Y , a homomor phism from the g roup Aut ( y ) = ho m( y, y ) to the group Aut ( f ( y )). So the pullback f ∗ is fairly str a igh tforward: given F : X → V ect , the pullbac k f ∗ F = F ◦ f : Y → V ect ass igns to each y ∈ Y the vector space F ( f ( y )), and gives a representation of Aut ( y ) on this v ector s pa ce where g : y → y acts by f ( g ). This is the pul lb ack r epr esen t ation . If f is an inclusion, this is usua lly called the r estricte d r epr esentation . The pushforw ar d , or adjoint of pullback, for an inclusion is genera lly ca lled finding the induc e d r epr esentation . W e remark that for the case where f is a n inclusion, Sternberg [17 ] gives s ome classical discussion of this fo r complex r epresen tations, as does Benson [6] for more mo dules ov er the group r ing with a more general base ring R . Here w e use the same ter m for the more gener al case when f is any homomorphism. F or any presheaf F , the pushforw ard f ∗ F is determined by the colimit for eac h comp onen t of that es sen tial preimage . T hen for each x ∈ X , we first g et: (45) M g : f ( y ) → x F ( y ) 2-VECTOR SP AC ES AND GROUPOIDS 19 Whic h is just the direct sum (i.e. bipro duct) ov er the isomor phism cla sses in the essential preima ge o f the cor responding vector spa ces. Ho wev er, this is no t the colimit: an ob ject in the essential preimage is a pair ( y , g ), but we note that if y and y ′ are isomorphic in Y , suc h isomor phisms induce isomor phisms of the spaces F ( y ), and the colimit will b e a quotient which identifies these spaces. In g eneral, the colimit will b e a direct sum over isomorphism classes [ y ] in the essential preimage. Each term of the sum is isomorphic to the induced repr esen tation of F ( y ) under the homomo r phism deter mined b y f . Now, consider wha t the induced representations are for each iso morphism cla s s. An y isomo r phism class [ y ] of ob jects in Y deter mines a group G = Aut ( y ), a nd sim- ilarly [ x ] ∈ X determines H = Au t ( x ) . So this reduces to the case where Y and X are just g roups (seen as one-ob ject ca tegories), so w e have a group homomorphism f : G → H . Using the induced algebra homomorphism f : C [ G ] → C [ H ], one ca n directly construct the induced homomorphism as a quotient: f ∗ V = C [ H ] ⊗ C [ G ] V . So for general group oids, with V = F ( y ), we hav e the direct s um: (46) ( f ∗ F )( x ) = M f ( y ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y )] F ( y ) Figure 5 illustra tes the induced representation schematically , for a single o b ject. Figure 5. Induced Representation fro m Homomorphism 4.3. Units and C o units. W e ha ve observed that the pullback and pushfor w ard maps f ∗ and f ∗ are b oth left and right adjoints. Thus there are tw o adjunctions to consider: f ∗ ⊣ f ∗ , where pushforward is right adjoint to pullbac k; a nd f ∗ ⊣ f ∗ where pushforward is left adjoint to pullback. F or conv enience, we r efer to these as the “rig h t adjunction” and “left adjunction” respec tively , after the p osition of the pushfor w ard. Each adjunction has unit and counit, so ther e are four natura l transformatio ns to describ e. W e will identify them as “right” and “le ft” unit a nd counit following the conv ention a bov e. Thus, we hav e : η L : Id [ Y , V ect ] = ⇒ f ∗ f ∗ (47) ǫ L : f ∗ f ∗ = ⇒ Id [ X , V ect ] (48) η R : Id [ X , V ect ] = ⇒ f ∗ f ∗ (49) ǫ R : f ∗ f ∗ = ⇒ Id [ Y , V ect ] (50) 20 JEFFREY C. MOR TON Once ag ain, it is use ful for practical calculations to have a co ordinate-dep enden t form for these maps, but there is a conv enient intrinsic definition which we sha ll describ e first. Her e again, we note that Benso n [6] describ es the case wher e f is an inclusion, in a more g e neral s e tting than the co mplex representations we consider here. T o beg in with, we should des cribe the functors f ∗ f ∗ (“push-pull”), which is an endofunctor on [ Y , V ect ], a nd f ∗ f ∗ (“pull-push”), which is a n endofunctor on [ X , V ect ]. F or the “push-pull”, f ∗ f ∗ , we first push a V ect -presheaf F on Y to one on X , then pull ba c k to Y . On ea ch ob ject y ∈ Y , this gives a new presheaf where the vector spa ce F ( y ) is replaced by the pullback (i.e. induced representation o f Aut ( y )) of f ∗ F ( f ( y )). But f ∗ F is a preshea f on X , which, at each x ∈ X , gives a co limit ov er the essential pr eimage of x in Y , namely L [ y ′ ] | f ( y ′ ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y ′ )] F ( y ′ ). In the cas e where x = f ( y ), this means we get: (51) f ∗ f ∗ F ( x ) = M [ y ′ ] | f ( y ′ ) ∼ = f ( y ) C [ Aut ( f ( y ))] ⊗ C [ Aut ( y ′ )] F ( y ′ ) thought of as a (left) representation of Aut ( y ) in the o b v ious w ay (i.e. g ∈ Aut ( y ) acts on this space as f ( g )). F or the “ pull-push”, f ∗ f ∗ , we first pull a V ect -presheaf G on X back to f ∗ G on Y . A t each y ∈ Y , this assig ns the vector space f ∗ G ( y ) = G ( f ( y )) as a representation o f Aut ( y ). W e then push forward to X to get, at each x ∈ X , that: (52) f ∗ f ∗ G ( x ) = M [ y ] | f ( y ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y )] G ( x ) Note that a priori the last space would b e G ( f ( y )), but since f ( y ) ∼ = x , we hav e also that G ( f ( y )) ∼ = G ( x ) as repres en tations of Au t ( y ). Here w e are implicitly ta king a colimit ov er the es s en tial preimage of x , whose ob jects ar e no t just y such that f ( y ) ∼ = x , but rather s uch y equippe d with a sp e cific iso morphism. These therefore induce sp ecific iso morphisms o f G ( f ( y )) a nd G ( x ), a nd the quotient implied b y the colimit identifies these space s. Now, the description a bov e accor ds with the usual description of these functors in the left a djunction. Since the adjunction is ambidextrous, it a pplies in b oth cases, but to des cribe the unit and counit prop erly , we should note that in general the ca nonical description o f the left and r igh t adjunctions ar e different. (Here a g ain we no te that Benson [6] shows this for mo dules ov er general rings , which in our case a re the group algebra s C [ Aut ( y )] etc., in the ca se of inclusion) W e need to take account of the sp ecific isomorphism be t ween the form we have presented (natural for the left adjunction), and the form which is natural for the right adjunction. The rig h t adjoint is given as : (53) f ∗ F ( y ) = M [ y ] | f ( y ) ∼ = x hom C [ Aut ( x )] ( C [ Aut ( y )] , F ( y )) (Note tha t the case for g roups, na mely when Y a nd X ha ve only one o b ject, app ears in each term of this direct sum). The Nakayama isomorphism gives the duality betw een the t wo descr iptions of f ∗ , in terms o f hom C [ Aut ( x )] and ⊗ C [ Aut ( x )] , by means of the exterior t r ac e map . The group oid ca se is just the dir ect sum of group 2-VECTOR SP AC ES AND GROUPOIDS 21 cases, which lo oks lik e: (54) N : M [ y ] | f ( y ) ∼ = x hom C [ Aut ( y )] ( C [ Aut ( x )] , F ( y )) → M [ y ] | f ( y ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y )] F ( y ) given by the ex terior tr ac e map in each factor of the sum: (55) N : M [ y ] | f ( y ) ∼ = x φ y 7→ M [ y ] | f ( y ) ∼ = x 1 # Aut ( y ) X g ∈ Aut ( x ) g − 1 ⊗ φ y ( g ) Note tha t the ex terior trace map gives an Aut ( x )-in v ar ian t vector, but the normal- ization is by the size o f Aut ( y ). In the case where the homomo rphism is an inclus ion, this is int erpr e ted as trace given b y a sum ov er cosets o f Aut ( y ) in Au t ( x ), (which is the situa tion usually presen ted in the group ca se). W e remark here that this factor will b e impor tan t in in terpreting our 2- functor Λ as a for m of group oidification. W e can no w write down the units and counits explicitly for both adjunctions in our preferred no tation. The left a nd r ig h t units ar e na tural trans formations which, for each V ect - presheaf on Y o r X respectively , gives a morphism which is itself a natura l trans- formation. So, in particular the left unit (56) η L ( F )( y ) : F ( y ) → M [ y ′ ] | f ( y ′ ) ∼ = f ( y ) C [ Aut ( f ( y ))] ⊗ C [ Aut ( y ′ )] F ( y ′ ) is given b y the na tural map int o the counit: (57) v 7→ M [ y ] (1 ⊗ v ) Notice the unit map has no contribution in the ima g e from an y y ′ which is no t in the isomorphism clas s [ y ]. (It is a canonical map out of the limit whic h g iv es the usual form for f ∗ .) The rig h t unit map (58) η R ( G )( x ) : G ( x ) → M [ y ] | f ( y ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y )] f ∗ G ( x ) is found by comp osing the Nak ay ama isomorphism (5 5) with the group oid form of the canonic a l map for the right adjo int. This is a direct sum, in which each factor is given b y the multiplication map: (59) v 7→ g 7→ g ( v ) Thu s, the compos ite is: (60) η R ( G )( x ) : v 7→ M [ y ] | f ( y ) ∼ = x 1 # Aut ( y ) X g ∈ Aut ( x ) g − 1 ⊗ g ( v ) The left and r igh t counits ar e natura l transformatio ns which, for each V ect - presheaf on X or Y resp ectiv ely , gives a morphism which is itself a natura l trans- formation. So in particular, the left counit (61) ǫ L ( G )( x ) : M [ y ] | f ( y ) ∼ = x C [ Aut ( x )] ⊗ C [ Aut ( y )] f ∗ G ( x ) → G ( x ) 22 JEFFREY C. MOR TON is given b y summing m ultiplication maps : (62) M [ y ] | f ( y ) ∼ = x g y ⊗ v 7→ X [ y ] | f ( y ) ∼ = x f ( g y ) v The rig h t counit map (63) ǫ R ( F )( y ) : M [ y ′ ] | f ( y ′ ) ∼ = f ( y ) C [ Aut ( f ( y ))] ⊗ C [ Aut ( y ′ )] F ( y ′ ) → F ( y ) is given by comp osing the inv erse o f the Nak ay ama isomorphis m (55) with the ev aluatio n ma p fro m the canonical form of the r igh t a djoin t. Again, the o nly factor which co n tributes is y ′ ∼ = y , and so w e hav e: (64) M [ y ′ ] | f ( y ′ ) ∼ = f ( y ) φ y ′ 7→ φ y (1) So finally , (by using that C [ Aut ( f ( y ))] is canonica lly isomo rphic to its dual using the canonic a l inner product on the gro up algebra) the comp osite is: (65) ǫ R ( F )( y ) : M [ y ′ ] | f ( y ′ ) ∼ = f ( y ) g y ′ ⊗ v y ′ 7→ # Aut ( y ) # Aut ( f ( y )) g y ( v y ) Here we ar e implicitly using the fact that the ob jects y ′ in the es sen tial preim- age come eq uipp ed with isomorphisms f ( y ′ ) → f ( y ) whic h induce s pecified isomor- phisms Aut ( f ( y ′ )) ∼ = Aut ( f ( y )). In the colimit which g a ve the direct sum ov er isomorphism classe s , these are all natur a lly iden tified. A straightforward chec k (cancelling the Nak ayama isomorphisms) verifies the unit and counit iden tities: ( ǫ L · I d f ∗ ) ◦ ( I d f ∗ · η L ) = Id f ∗ (66) ( I d f ∗ · ǫ L ) ◦ ( η L · I d f ∗ ) = Id f ∗ (67) ( ǫ R · I d f ∗ ) ◦ ( I d f ∗ · η R ) = Id f ∗ (68) ( I d f ∗ · ǫ R ) ◦ ( η R · I d f ∗ ) = Id f ∗ (69) 5. Sp ans o f Gr oupoids W e hav e a lready seen how essentially finite group oids give rise to 2-vector s paces. In this section, we will s how the weak functoriality of these as signmen ts. In partic- ular, we firs t m ust describ e how our 2- functor Λ will pro duce 2-linear maps from spans of gr oupoids. 5.1. 2-Linear Maps from Spans of Group oids. Given a span of group oids as in Figure 2 , we can apply the functor [ − , V ect ] to the span diagra m (7). This functor is con trav ariant, so we get a co span: (70) [ X , V ect ] [ A 1 , V ect ] s ∗ 8 8 q q q q q q q q q q q [ A 2 , V ect ] t ∗ f f M M M M M M M M M M M W e no w r ecall that the pullbac ks s ∗ and t ∗ hav e adjoints: this is a direct con- sequence of Theorem 4.2.1. This reveals ho w to transp ort a V ect -presheaf on A 1 along this cospan. In fact, it giv es tw o 2-linear maps, whic h ar e adjoin t. Thinking 2-VECTOR SP AC ES AND GROUPOIDS 23 of the spa n a s a mo rphism in Span( Fi nGpd ) from A 1 to A 2 , we find a cor respo nd- ing 2- linear map (thoug h the adjoint is equally well defined). W e first do a pullback along s , giving a V ect -pr esheaf on X . Then w e use the adjoint map t ∗ . So we hav e the following: Definition 5 .1.1. F or a sp an of gr oup oids X : A 1 → A 2 in Span( FinGp d ) define the 2-line ar map: (71) t ∗ ◦ s ∗ : [ A 1 , V ect ] − → [ A 2 , V ect ] Now, by Theo r em 4.2.1, b oth s ∗ and t ∗ are 2-linear maps, so the comp osite t ∗ ◦ s ∗ is also a 2-linear map. Remark 5.1.2. W e can think of the pullback-pushforward construction as giv ing— in the language of quantum field theory—a “sum ov er his tories” for ev olving a 2- vector. Each 2-vector in [ A 1 , V ect ] pic ks out a vector space for each ob ject o f A 1 . The 2-linear map we hav e desc r ibed tells us how to evolv e this 2-vector a long a span. First w e consider the pullback to [ X , V ect ], which giv es us a 2-v ector consisting of all assignments of v ector spaces to ob jects of X which pro ject to the ch osen one in A 1 . Each of these ob jects could b e co nsidered a “his tory” of the 2-vector along the spa n. W e then “push forward” this assignment to A 2 , which inv olves a colimit. This is mo re general than a sum, though so o ne could describ e this as a “c o limit of histories”. It takes in to acco un t the s y mmetries betw een individual “ histories” (i.e. morphisms in X ). So, given a span X : A 1 → A 2 , we can wr ite Λ( X ) in terms of its effect on a V ect -presheaf G on A 1 , which, at any ob ject a 2 ∈ A 2 gives: (72) Λ( X )( G )( a 2 ) = ( M [ x ] | t ( x ) ∼ = a 2 C [ Aut ( a 2 )] ⊗ C [ Aut ( x )] G ( s ( x ))) by e x actly the same re a soning as in Section 4 .3. It is sometimes useful—particularly when w e lo ok at co mposition of s pa ns—to break up the direct sum into the contributions from different ob jects o f A 1 , like this: (73) Λ( X )( G )( a 2 ) = M [ a 1 ] ∈ A 1 ( M [ x ] s ( x ) ∼ = a 1 t ( x ) ∼ = a 2 C [ Aut ( a 2 )] ⊗ C [ Aut ( x )] G ( a 1 )) Moreov er, there is a conv enient wa y to write down the comp onent s of the 2-line a r map asso ciated to a span, whic h is giv en by F rob enius recipr ocity . Prop osition 5. 1.3. Given b asis elements ( a 1 , W 1 ) ∈ Λ( A 1 ) and ( a 2 , W 2 ) ∈ Λ( A 2 ) , the matrix element s ar e: (74) Λ( X ) ( a 1 ,W 1 ) , ( a 2 ,W 2 ) ≃ M [ x ] hom Rep (Aut( x )) [ s ∗ ( W 1 ) , t ∗ ( W 2 )] Here, the direct sum is tak en ov er equiv a lence class e s [ x ] in the es sen tial preimage of ( a 1 , a 2 ): that is , o b jects o f X mapping to a 1 and a 2 . F o r each [ x ], the functors s and t define homomorphisms (75) s x : Aut ( x ) → Aut( s ( x )) and (76) t x : Aut ( x ) → Aut( t ( x )) 24 JEFFREY C. MOR TON , which define the induced representations. W e think of the terms o f the dir ect sum as “lying over” the ob jects x . So using the adjoint 2 -linear map (77) t ∗ : Λ ( X ) → Λ( A 2 ) to push forwar d a 2 -v ector s ∗ F : X → V e ct to one on A 2 , the ab ov e is also , by F ro b enius recipro city: (78) M [ x ] hom Rep (Aut( a 2 )) [( t x ) ∗ ◦ ( s x ) ∗ W 1 , W 2 ] By Sch ur’s lemma, this says: (79) Λ( X )( a 1 , W 1 ) = M [ x ] ( t x ) ∗ ◦ ( s x ) ∗ ( a 1 , W 1 ) since the co mponents of Λ( X )( a 1 , W 1 ) count the num b er o f copies of W 2 in the pushforward of W 1 . (In the r emainder of this pap er, we will suppress the subscripts and denote s x by s and t x by t when the context makes clea r that we mean the induced gr oup homo morphism.) So in fact, Λ( X )( a 1 , W 1 ) is a direct sum of irreducible 2-vectors in Λ( A 2 ), given as a sum o ver x ∈ X restricting to a 1 , a 2 of the induced representations along each restriction map. 5.2. Λ and Comp osition. Nex t w e show that Λ preserves horizontal comp osition of functor s we akly —that is, up to a natural isomo rphism. That is, the comp osition of the 2-linear maps must b e compatible, in a weak se ns e, with comp osition of spans of group oids. T o construct the isomorphism e xplicitly , we lo ok a t the weak pullbac k sq uare in the middle o f (11), since the t w o 2-linear maps being compar ed differ only by arrows in this squa re. The squar e as g iv en is a weak pullback, with the natural isomorphism α “ho rizon tally” across the squar e. When considering a co rrespo nding square of categories of V ect -presheaves, the ar ro ws are rev erse d. So, including the adjoints of t ∗ and T ∗ , namely t ∗ and T ∗ , we hav e the square: (80) [ X ′ ◦ X , V ect ] T ∗ ' ' P P P P P P P P P P P P [ X , V ect ] S ∗ 7 7 o o o o o o o o o o o t ∗ ' ' O O O O O O O O O O O [ X ′ , V ect ] T ∗ g g P P P P P P P P P P P P [ A 2 , V ect ] ( s ′ ) ∗ 7 7 n n n n n n n n n n n n t ∗ g g O O O O O O O O O O O Note that there a re tw o squares here—one by taking only the “pull” morphisms ( − ) ∗ from the indica ted adjunctions, and the other by taking only the “ push” morphisms ( − ) ∗ . The first is just the square of pullbacks along morphisms from the weak pullback square of group oids. Comparing these is the co re of the following theorem, which gives one o f the necessary prop erties for Λ to be a w eak 2-functor. W e give a more explicit des cription of the functors Λ( X ′ ◦ X ) and Λ( X ′ ) ◦ Λ ( X ) below, but remark that this gener al result is discussed b y Panc hadcharam [16] (Prop osition 0.0.1), and the genera l theory b ehind this elab orated o n by Street [18]. 2-VECTOR SP AC ES AND GROUPOIDS 25 Theorem 5. 2.1. The pr o c ess Λ we akly pr eserves c omp osition. In p articular, ther e is a natur al isomorp hism (81) β X ′ ,X : Λ ( X ′ ◦ X ) → Λ( X ′ ) ◦ Λ( X ) Pr o of. Recall that, g iv en the compo s ite of tw o spans of gro upoids in (11), we ha ve 2-linear maps: (82) Λ( X ′ ◦ X ) = ( t ′ ◦ T ) ∗ ◦ ( s ◦ S ) ∗ and (83) Λ( X ′ ) ◦ Λ( X ) = ( t ′ ) ∗ ◦ ( s ′ ) ∗ ◦ t ∗ ◦ ( s ) ∗ So we w ant to show there is a natura l isomorphism: (84) β X ′ ,X : ( t ′ ◦ T ) ∗ ◦ ( s ◦ S ) ∗ → ( t ′ ) ∗ ◦ ( s ′ ) ∗ ◦ t ∗ ◦ ( s ) ∗ It suffices to sho w that ther e is an isomo rphism: (85) γ : T ∗ ◦ S ∗ → ( s ′ ) ∗ ◦ t ∗ betw een the upp er a nd low er halv es of the square in the middle of (11) since then β X ′ ,X is obta ined b y tensor ing with iden tities. So first taking a V ect -presheaf F on X , w e get that S ∗ F is a V ect -presheaf on X ′ ◦ X . Now ov er any fixed o b ject x ∈ X , w e hav e a set of o b jects in X ′ ◦ X which restrict to it: there is one for each c hoice ( g , x ′ ) which is compatible with x in the sense that ( x, g , x ′ ) is a n ob ject in the weak pullbac k - that is, g : t ( x ) → s ′ ( x ′ ). Each o b ject of this form is ass igned S ∗ F ( x, g , x ′ ) = F ( x ) F urther, there are isomor phisms b e tween such ob jects, namely pairs ( h, k ) as ab o ve. There are thus no isomorphisms except b et ween ob jects ( x, g 1 , x ′ ) and ( x, g 2 , x ′ ) for some fixed x and x ′ . F or any such fixed x and x ′ , ob jects corre sponding to g 1 and g 2 are isomorphic if (86) g 2 t ( h ) = p ′ 1 ( k ) g 1 . Denote the isomorphism class of an y g by [ g ]. Then we get: (87) T ∗ ◦ S ∗ F ( x ′ ) = M x ∈ X M [ x ′ ]: t ( x ) ∼ = s ′ ( x ′ ) C [ Aut ( x ′ )] ⊗ C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] F ( x ) since Aut ( x ) × Aut ( t ( x )) Aut ( x ′ ) is the automorphism group of the o b ject in X ′ ◦ X which restr icts to x and x ′ . Notice that although outside direct sum her e is written ov er all o b jects x on S , the only ones which co n tr ibute any factor ar e those for which g : t ( x ) → s ′ ( x ′ ) for some g . The inside direct sum is ov er all isomorphism classes of elements g for which this o ccurs: in the colimit, v ector space s over ob jects with isomor phisms b etw een them are identified. Note that in the direct sum over [ g ], there is a tenso r pro duct term for ea c h class [ g ] : t ( x ) → s ′ ( x ′ ). By the definition of the tensor pro duct o ver an algebra, we can pass elemen ts of C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] through the tensor pro duct. These are generated by pa irs ( h, k ) ∈ Aut ( x ) × Au t ( x ′ ) where the images of h a nd k are conjugate by g so that t ( h ) g = g s ′ ( k ). These are just automorphisms of g : so this says w e are cons idering ob jects only up to these isomo r phisms. 26 JEFFREY C. MOR TON This is the result of the “pull-push” side of the squar e applied to F . Now consider the “push-pull” side: ( s ′ ) ∗ ◦ t ∗ . First, pushing do wn to A 2 , we get, on a n y ob ject a ∈ A 2 (88) t ∗ F ( a ) = M [ x ] | t ( x ) ∼ = a C [ Aut ( a )] ⊗ C [ Aut ( x )] F ( x ) Then, pulling this back up to X ′ , we find: (89) ( s ′ ) ∗ ◦ t ∗ F ( x ′ ) = M [ x ] | t ( x ) ∼ = s ′ ( x ′ ) C [ Aut ( t ( x ))] ⊗ C [ Aut ( x )] F ( x ) Now w e define a na tural isomorphism (90) γ X,X ′ : T ∗ ◦ S ∗ → ( s ′ ) ∗ ◦ t ∗ as follows. F or each x ′ , this must be a n isomorphism b et ween the a bov e vector spaces. The first step is to o bs erv e that there is a 1 -1 corresp ondence b etwe en the terms of the first direct sums, and then s econdly to note that the corr esponding terms are isomorphic. Since the outside direct sums are ov er all ob jects x ∈ X for which t ( x ) ∼ = s ′ ( x ′ ), it suffices to get an isomor phism betw een each term. That is, betw een (91) C [ Aut ( x ′ )] ⊗ C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] F ( x ) and (92) C [ Aut ( t ( x ))] ⊗ C [ Aut ( x )] F ( x ) In order to define this is omorphism, first note that bo th o f these vector spaces are in fact C [ Aut ( x ′ )]-mo dules. An elemen t of Aut ( x ′ ) acts on (91) in each comp onen t by the standa rd group algebr a multiplication, g iving a n action o f C [ Aut ( x ′ )] by extending linearly . An elemen t l ∈ Au t ( x ′ ) acts on (9 2) by the action of s ′ ( l ) on C [ Aut ( t ( x ))]. Tw o elemen ts l 1 , l 2 ∈ [ l ] in the same equiv alence cla ss hav e the same action o n this tensor pro duct, since they differ precisely by ( h, k ) ∈ Aut ( x ) × Aut ( x ′ ), so tha t l 2 t ( h ) = s ′ ( k ) l 1 . Also, w e no tice that, in (91), for ea c h g ∈ Aut ( t ( x )), the cor respo nding term of the form C [ Aut ( x ′ )] ⊗ C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] F ( x ) is generated by ele ments of the form k ⊗ v , for k ∈ C [ Aut ( x ′ )]. and v ∈ F ( x ). These are sub ject to the relations that, for a n y ( h, k 1 ) ∈ C [ Aut ( x )] × C [ Au t ( x ′ )] such that t ( h ) = g − 1 s ′ ( k 1 ) g : (93) k k 1 ⊗ v = k ( h, k 1 ) ⊗ v = k ⊗ ( h, k 1 ) v = k ⊗ hv since elements of C [ Aut ( x )] × C [ Aut ( x ′ )] act on F ( x ) and C [ Aut ( x ′ )] by their pro- jections into the first a nd second comp o nen ts resp ectiv ely . Now, we define the map γ x,x ′ . First, for a n y element of the form k ⊗ v ∈ C [ Aut ( x ′ )] ⊗ C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] F ( x ) in the g compo nen t o f the direct sum (91): (94) γ x,x ′ ( k ⊗ v ) = s ′ ( k ) g − 1 ⊗ v which we claim is in C [ Aut ( t ( x ))] ⊗ C [ Aut ( x )] F ( x ). This map ex tends linearly to the whole space. T o c heck this is well-defined, supp o se we ha ve t wo representativ es k 1 ⊗ v 1 and k 2 ⊗ v 2 of the class k ⊗ v . So these differ by an elemen t o f C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )], say ( h, k ), so that (95) k 1 = k 2 k 2-VECTOR SP AC ES AND GROUPOIDS 27 , and (96) h v 1 = v 2 where (97) t ( h ) = gs ′ ( k ) g − 1 But then γ x,x ′ ( k 1 ⊗ v 1 ) = s ′ ( k 1 ) g − 1 ⊗ v 1 (98) = s ′ ( k 2 k ) g − 1 ⊗ v 1 = s ′ ( k 2 ) g − 1 g s ′ ( k ) g − 1 ⊗ v 1 = s ′ ( k 2 ) g − 1 t ( h ) ⊗ v 1 = s ′ ( k 2 ) g − 1 ⊗ hv 1 while on the other hand, γ x,x ′ ( k 2 ⊗ v 2 ) = s ′ ( k 2 ) g − 1 ⊗ v 2 (99) = s ′ ( k 2 ) g − 1 ⊗ hv 1 But these are r epresen tatives of the same class in C [ Aut ( t ( x ))] ⊗ C [ Aut ( x )] F ( x ), so γ is well defined on g enerators, a nd thus extends linearly to g iv e a well-defined function on the whole space. Now, to see that γ is inv ertible, note that g iv en an ele ment m ⊗ v ∈ C [ Aut ( t ( x ))] ⊗ C [ Aut ( x )] F ( x ), we can define (100) γ − 1 ( m ⊗ v ) = 1 ⊗ v ∈ M t ( x ) → s ′ ( x ′ ) C [ Aut ( x ′ )] ⊗ C [ Aut ( x ) × Aut ( t ( x )) Aut ( x ′ )] F ( x ) in the co mponent co ming from the isomorphism class of g = m − 1 (w e will denote this b y (1 ⊗ v ) m − 1 to make this explicit, and in general a n element in the class of g will b e denoted with subscript g whenever we need to refer to g ). Now we chec k that this is w ell-defined. Given m 1 ⊗ v 1 and m 2 ⊗ v 2 representing the same element m ⊗ v of C [ Aut ( t ( x )] ⊗ C [ Aut ( x )] F ( x ), we m ust hav e h 1 ∈ Aut ( x ) with (101) m 1 t ( h 1 ) = m 2 and (102) h 1 v 2 = v 1 But then applying γ − 1 , we get: (103) γ − 1 ( m 1 ⊗ v 1 ) = (1 ⊗ v 1 ) m − 1 1 = (1 ⊗ h 1 v 2 ) m − 1 1 and (104) γ − 1 ( m 2 ⊗ v 2 ) = (1 ⊗ v 2 ) m − 1 2 = (1 ⊗ v 2 ) t ( h 1 ) − 1 m − 1 1 but these are in the same comp onent, since g ∼ g ′ when g ′ s ′ ( k ) = t ( h ) g for so me h ∈ Aut ( x ) a nd k ∈ Au t ( x ′ ). But then, taking k = 1 and h = h − 1 1 , we get that m − 1 1 ∼ m − 1 2 , and hence the comp onen t of γ ( m ⊗ v ) is w ell defined. But then, consider m ⊗ v = γ (( k ⊗ v ) g ) = s ′ ( k ) g − 1 ⊗ v . Applying γ − 1 we g et: (105) γ − 1 ◦ γ ( k ⊗ v ) g = (1 ⊗ v ) gs ′ ( k ) − 1 28 JEFFREY C. MOR TON so we ho pe that these determine the s ame elemen t. But in fact, notice that the morphism in the weak pullback which gives that g − 1 and s ′ ( k ) g − 1 are isomorphic is just lab elled b y ( h, k ) = (1 , k ), which indeed takes k to 1 and leav es v in tact. So these are the corresp onding elemen ts under this isomorphism. So γ is inv ertible, hence a n isomorphism. Thus w e define (106) β X,X ′ = 1 ⊗ γ ⊗ 1 This is the isomorphism we w anted. So the β X,X ′ can now be seen a s natura l transformations explicitly . First consider Λ( X ′ ) ◦ Λ( X ), whic h a cts on a presheaf G on A 1 as follows. Λ( X )( G )( a 2 ) = M [ x ] | t ( x ) ∼ = a 2 C [ Aut ( a 2 )] ⊗ C [ Aut ( x )] G ( s ( x ))) (107) = M [ a 1 ] ∈ A 1 ( M [ x ] s ( x ) ∼ = a 1 t ( x ) ∼ = a 2 C [ Aut ( a 2 )] ⊗ C [ Aut ( x )] (Λ( X )( G )( a 1 )) and then applying Λ( X ′ ) to this, w e get, rearranging direct sums suita bly: (Λ( X ′ ) ◦ Λ( X ))( G )( a 3 ) (108) = M [ a 2 ] ∈ A 2 ( M [ x ′ ] s ′ ( x ′ ) ∼ = a 2 t ′ ( x ′ ) ∼ = a 3 C [ Aut ( a 3 )] ⊗ C [ Aut ( x ′ )] (Λ( X )( G )( a 2 )) = M [ a 1 ] ∈ A 1 M [ a 2 ] ∈ A 2 M [ x ] s ( x ) ∼ = a 1 t ( x ) ∼ = a 2 M [ x ′ ] s ′ ( x ′ ) ∼ = a 2 t ′ ( x ′ ) ∼ = a 3 C [ Aut ( a 3 )] ⊗ C [ Aut ( x ′ )] C [ Aut ( a 2 )] ⊗ C [ Aut ( x )] G ( a 1 ) W e similarly ha ve: (109) (Λ( X ′ ) ◦ Λ( X ))( G )( a 3 ) = M [ a 1 ] ∈ A 1 ( M [( x,f,x ′ )] (( s ◦ S )( x,f ,x ′ ) ∼ = a 1 ( t ′ ◦ T ( x,f ,x ′ ) ∼ = a 3 C [ Aut ( a 3 )] ⊗ C [ Aut ( x,f ,x ′ )] G ( a 1 )) The iso mo rphisms β X,X ′ allow us to identify (108) and (10 9). Remark 5. 2 .2. W e can also describe the effect of β in co ordinates - tha t is, in the matrix form for a natural transformatio n o f a 2-linea r map. This illustrates the fac t that C [ Au t ( a 2 )] ∼ = L W W ⊗ W ⋆ , where the sum is o ver irreducible represent ations of Aut ( a 2 ). F or supp ose w e ha ve a comp osite o f spa ns, X ′ ◦ X . By Lemma 3.2.2, we hav e that the functor s T ∗ ◦ S ∗ and ( s ′ ) ∗ ◦ t ∗ can b e written in the form of a matrix of vector spaces as in (17). First, Λ( X ′ ◦ X ) is given by a matrix indexed by clas ses o f ob jects and rep- resentations ([ a 1 ] , W 1 ) fro m A 1 and ([ a 3 ] , W 3 ) from A 3 . In the form (74 ), we s ee 2-VECTOR SP AC ES AND GROUPOIDS 29 that Λ( X ′ ◦ X ) ([ a 1 ] ,W 1 ) , ([ a 3 ] ,W 3 ) (110) ≃ M [( x,f ,x ′ )] hom Rep (Aut( x,f ,x ′ )) [( s ◦ S ) ∗ ( W 1 ) , ( t ′ ◦ T ) ∗ ( W 3 )] where [( x, f , x ′ )] repr e sen ts an equiv alence class of ob jects in the w eak pullback. The iso morphisms β X,X ′ take this to the matrix pro duct of Λ( X ′ ) with Λ( X ), which has comp onents given b y a direct sum ov er class es and repre s en tations ([ a 2 ] , W 2 ) from A 2 : [Λ( X ′ ◦ X )] ([ a 1 ] ,W 1 ) , ([ a 3 ] ,W 3 ) (111) β X,X ′ → M ([ a 2 ] ,W ) [Λ( X )] ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) ⊗ [Λ( X ′ )] ([ a 2 ] ,W 2 ) , ([ a 3 ] ,W 3 ) Recall that [Λ( X )] ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) , is a direct sum over is omorphism cla sses of ob jects o f X whic h r estrict to [ a 1 ] and [ a 2 ], with eac h compo nen t b eing (112) hom Rep( Aut ( x )) ( s ∗ W 1 , t ∗ W 2 ) The component [Λ( X ′ )] ([ a 2 ] ,W 2 ) , ([ a 3 ] ,W 3 ) , is a similar sum o ver classes of ob jects of X ′ which r estrict to [ a 2 ] and [ a 3 ]. The iso morphism β X ′ ,X ident ifies the comp osite, who se compo nen ts ar e sums ov er ob jects of X ′ ◦ X , with this pro duct. This β consists of isomorphisms in each comp onen t. So in fac t, the β are describ ed b y their compo nen ts: M [( x,f ,x ′ )] hom(( s ◦ S ) ∗ ( W 1 ) , ( t ′ ◦ T ) ∗ ( W 3 ) (113) β X,X ′ − → M ([ a 2 ] ,W 2 ) hom( s ∗ ( W 1 ) , t ∗ ( W 2 )) ⊗ hom(( s ′ ) ∗ ( W 2 ) , ( t ′ ) ∗ ( W 3 )) Where the seco nd s um is over equiv ale nce classes o f ( x, f , x ′ ) such that f : t ( x ) → s ′ ( x ′ ), and for which s ( x ) = a 1 and t ′ ( x ′ ) = a 3 . Since the choice o f [ x ] and [ x ′ ] amoun ts to the same thing as the choice of [ a 2 ], this isomo rphism turns a sum o ver representations W 2 of tensor pro ducts of space (of intertwiners), into a sum over iso morphism (conjugacy) classes of f ∈ Aut([ a 2 ]). This isomorphism is describing how the r epresen tations in the big pullbac k decom- po se. 6. Sp ans of Sp ans The situation we are interested in can b e repr esen ted as an equiv alence class of spans of spa ns of the following sort: (114) X 1 s 1 } } | | | | | | | | t 1 ! ! B B B B B B B B A 1 Y s O O t A 2 X 2 s 2 a a B B B B B B B B t 2 = = | | | | | | | | 30 JEFFREY C. MOR TON Recall that we a ssume weak co mm utativit y her e - that is, that there are isomor- phisms ζ s : s 1 ◦ s → s 2 ◦ t a nd ζ t : t 1 ◦ s → t 2 ◦ t . Given this situation, which is a 2-morphism for the ass o ciated bicatego ry of spans, we want to get a 2-mor phism in the bicategor y 2V ect . That is to say , a natural tra ns formation α = Λ( Y ) be t ween a pair of 2 -linear maps. In this section, we s ho w how to construct Λ( Y ). 6.1. 2-Morphism s from Spans of Spans. W e begin b y noting that the diagram (114), which w eakly comm utes up to isomo rphisms ζ s and ζ t , gives rise to a dia gram of pullback functors: (115) [ X 1 , V ect ] s ∗ [ A 1 , V ect ] s 2 ∗ & & N N N N N N N N N N N s 1 ∗ 8 8 p p p p p p p p p p p [ Y , V ect ] [ A 2 , V ect ] t 1 ∗ f f N N N N N N N N N N N t 2 ∗ x x p p p p p p p p p p p [ X 2 , V ect ] t ∗ O O which co mm utes up to iso mo rphisms: (116) ζ ∗ s : s ∗ ◦ s ∗ 1 ( V ) ˜ → t ∗ ◦ s ∗ 2 ( V ) and similarly (117) ζ ∗ t : s ∗ ◦ t ∗ 1 ( V ) ˜ → t ∗ ◦ t ∗ 2 ( V ) W e w ant to g et a natural transforma tion from Λ( X 1 ) a nd Λ( X 2 ) fr om this dia- gram. In section 6.2 w e sho w ho w this can b e describ ed as a “pull-push” pro cess, similar to the one us e d to define the 2-linear maps, but first it can b e defined in terms of the unit and counit maps w e hav e alr eady defined. Definition 6.1.1 . Given a sp an b etwe en sp ans, Y : X 1 → X 2 , for X 1 , X 2 : A 1 → A 2 , then (118) Λ( Y ) : Λ( X 1 ) → Λ( X 2 ) is the natur al tr ansformation given as (119) Λ( Y ) = ǫ L,t ◦ (( ζ t ) ∗ ⊗ (( ζ s ) ∗ ) − 1 ) ◦ η R,s : ( t 1 ) ∗ s ∗ 1 = ⇒ ( t 2 ) ∗ s ∗ 2 wher e ǫ L,t is the c ounit (61) for the left adjunction asso ciate d t o t , and η R,s is the unit (58) fo r the right adjunction asso ciate d t o s . W e comment here that this comp osition of left unit follow e d b y right counit can be int erpre ted as a “pull-push” in a sens e that can b e seen more precisely when we consider this natur al transformation in co ordinates. In the spec ia l case where A i = 1, this recov ers g roupoidifica tion in the sense o f Baez and Dolan, as s ho wn in Theorem 6.2.1. Remark 6.1. 2. Hence fo rth, we will assume that the diag ram (114) c o mm utes strictly - that is, ζ s and ζ t are iden tity 2-morphisms . This is a mild assumption, since the dia g ram can alwa ys b e “strictified” by taking equiv alent g roupo ids for source and target which are skeletal. Similar a rgumen ts will follo w through if not, but in this simpler case, we simply have: (120) Λ( Y ) = ǫ L,t ◦ η R,s : ( t 1 ) ∗ s ∗ 1 = ⇒ ( t 2 ) ∗ s ∗ 2 2-VECTOR SP AC ES AND GROUPOIDS 31 F or our co nstruction to g iv e a 2 -functor, this must a gree with comp osition in tw o wa ys. The fir s t is strict preserv ation of vertical comp osition; the second is pr eser- v ation of horizontal compo sition as strictly as p ossible (i.e. up to the isomorphisms β which make comparison p o ssible - as we will see). W e will show in Lemma 6.1. 3. The assignment Λ( Y ) to sp ans of sp ans given in Definition 6.1. 1 pr eserves vertic al c omp osition strictly: Λ( Y ′ ◦ Y ) = Λ( Y ′ ) ◦ Λ( Y ) . Pr o of. Supp ose we have a vertical comp osite of tw o spans b et ween spa ns, here written as 2- cells: (121) A 1 X 1 X 2 / / X 3 B B A 2 Y Y ′ The comp o sition is given by a weak pullbac k (tak en up to isomo rphism) - that is, a diagram of the form (11), with the Y and Y ′ in place of X and X ′ , a nd the X i in place of the A i . W e use the same notation for the maps in a ll thes e s pa ns. Of course, each ob ject in (121) comes e q uipped with (commuting) maps into A 1 and A 2 , but we can ignor e these here. So the so urce and target maps for Y a r e s and t , and thos e for Y ′ are s ′ and t ′ , and we can easily write: (122) Λ( Y ′ ) ◦ Λ( Y ) = ǫ L,t ′ ◦ η R,s ′ ◦ ǫ L,t ◦ η R,s Now, to write Λ( Y ′ ◦ Y ), w e reca ll that the vertical co mposite is formed by weak pullback o f spans, with the resulting source and tar get ma ps s ◦ S and t ′ ◦ T , wher e the group oid in the spa n Y ′ ◦ Y is the comma catego r y whose ob jects are of the for m ( y ′ , g 2 , y ), with g 2 : t ( y ) → s ′ ( y ′ ) in X 2 , and S and T a re the natural pro jections onto Y and Y ′ . Then of course (123) Λ( Y ′ ◦ Y ) = ǫ L, ( t ′ ◦ T ) ◦ η R, ( s ◦ S ) Now, a comp osite o f adjunctions is an adjunction (see for instance Ma cLane [13] IV.8), and the unit a nd counit of the compos ite is given in a standard w ay , so we hav e: (124) ǫ L, ( t ′ ◦ T ) = ǫ L,t ′ ◦ (Id ( t ′ ) ∗ ⊗ ǫ L,T ⊗ Id ( t ′ ) ∗ ) and (125) η R, ( s ◦ S ) = (Id s ∗ ⊗ η R,S ⊗ Id s ∗ ) ◦ η R,s So we get (126) Λ( Y ′ ◦ Y ) = ǫ L,t ′ ◦ (Id ( t ′ ) ∗ ⊗ ǫ L,T ⊗ Id ( t ′ ) ∗ ) ◦ (Id s ∗ ⊗ η R,S ⊗ Id s ∗ ) ◦ η R,s So to g et strict comp osition, we just need that (127) (Id ( t ′ ) ∗ ⊗ ǫ L,T ⊗ Id ( t ′ ) ∗ ) ◦ (Id s ∗ ⊗ η R,S ⊗ Id s ∗ ) = η R,s ′ ◦ ǫ L,t This follows the same pattern as the pro of for the fa ct that Λ weakly pr eserves comp osition o f mor phisms. No te that the t wo sides of this ex pression are the top and bottom of a (w eak) pullback s quare. So in particular, the argument for weak 32 JEFFREY C. MOR TON preserv ation of comp osition of spa ns shows that we also have a pullback square for the induced functors. In pa rticular (ignoring the identit y maps), we first get the rig h t unit for S : Y ′ ◦ Y → Y , whic h at y ∈ G ( y ) ∼ = G ( a 1 ) gives: (128) η R,S : v 7→ M [( y ,f, y ′ )] 1 # Aut ( y , f , y ′ ) X g ∈ Aut ( y ) ( g − 1 ) ⊗ g ( v ) and the left counit for T : Y ′ ◦ Y → Y ′ takes this to. So this giv es (129) ǫ L,T ◦ η R,S : v 7→ X [( y ,f, y ′ )] 1 # Aut ( y , f , y ′ ) X g ∈ Aut ( y ) ( g − 1 ) ⊗ g ( v ) since the targ et space is now a lr eady a tensor product ov er C [ Aut ( x 2 )]. Similarly , on the other side w e hav e firs t the left counit for t : Y → X 2 , then the rig h t unit fo r s ′ : Y ′ → X 2 , giving: (130) η R,s ′ ◦ ǫ L,t : v 7→ X [ y ′ ] | s ′ ( y ′ ) ∼ = t ( y ) 1 # Aut ( t ( y )) X g ∈ Aut ( x 2 ) g − 1 ⊗ g ( v ) Since the sources and targe ts o f the ma ps (6 1) a nd (5 8 ) are in a pullback sq ua re, the coefficients a rising fro m the Nak ay ama is omorphisms will yield the same group av erages, and the terms of the implied direct sum corresp ond pair wise. So these maps are indeed equal. W e also must show tha t Λ respects ho rizon tal comp osition weakly . T o make this clear, it will b e convenien t to write source a nd target 2- linear maps in the form (108) and (10 9). Lemma 6.1. 4. The assignment Λ ( Y ) to sp ans of sp ans given by Definition 6.1.1 pr eserves horizontal c omp osition strictly, up to t he isomorphism we akly pr eserving c omp osition of the sour c e and t ar get morph isms: (131) Λ( A 1 ) Λ( X ′ 1 ◦ X 1 ) # # Λ( X ′ 2 ◦ X 2 ) ; ; Λ( X 1 ) * * Λ( X 2 ) 4 4 Λ( A ′ 2 ) Λ( X ′ 1 ) * * Λ( X ′ 2 ) 4 4 Λ( A 3 ) Λ( Y ) Λ( Y ′ ) β X 1 ,X ′ 1 β − 1 X 2 ,X ′ 2 = Λ ( A 1 ) Λ( X ′ 1 ◦ X 1 ) & & Λ( X ′ 2 ◦ X 2 ) 8 8 Λ( A 3 ) Λ( Y ′ ◦ Y ) Pr o of. (Elsewher e , we hav e used the same notation for horizo ntal and vertical co m- po sition of all kinds, to s implify notation and b ecause co n text made this una m big u- ous. In this pro of it will b e helpful to distinguish the tw o, so w e write v ertical com- po sition with no s y m b ol, conca tenating na tural transfor mations b et ween 2- linear maps.) 2-VECTOR SP AC ES AND GROUPOIDS 33 Begin by wr iting the spa ns explicitly . The situatio n for a horiz on tal compos ite of 2-morphis ms in Span( FinGp d ) lo oks lik e: (132) X ′ 1 ◦ X 1 S 1 z z v v v v v v v v v T 1 $ $ H H H H H H H H H X 1 α 1 ∼ + 3 s 1 ~ ~ } } } } } } } } t 1 $ $ I I I I I I I I I I X ′ 1 s ′ 1 z z v v v v v v v v v v t ′ 1 A A A A A A A A A 1 Y s O O t σ o o _ _ _ τ / / _ _ _ _ A 2 Y ′ s ′ O O t ′ σ ′ o o _ _ _ _ τ ′ / / _ _ _ A 3 X 2 α 2 ∼ + 3 s 2 ` ` A A A A A A A A t 2 : : v v v v v v v v v v X ′ 2 s ′ 2 d d I I I I I I I I I I t ′ 2 > > } } } } } } } } X ′ 2 ◦ X 2 S 2 d d H H H H H H H H H T 2 : : v v v v v v v v v (Note that here a gain w e are ass uming the 2-morphis ms Y and Y ′ are strict, so that s 1 ◦ s = s 2 ◦ t and similarly for the other compo sites. W e represent these by the dotted arrows σ , τ , σ ′ and τ ′ . As b e fore, a s imilar ar gumen t would go thr ough if these spans of span maps were only w eakly commut ing, but we would need the ζ natural transforma tions a s discussed for (12 )). Now, the functor Λ assig ns 2-linea r maps to the spans X 1 , X 2 , X ′ 1 , a nd X ′ 2 , a nd their c o mposites, and natural transformations to Y a nd Y ′ . Then the horizontal comp osite is a natural transformation between 2-linear maps: (133) Λ( Y ′ ) ◦ Λ( Y ) : Λ( X ′ 1 ) ◦ Λ( X 1 ) → Λ( X ′ 2 ) ◦ Λ( X 2 ) And we can calculate as in the pro of of Theorem 6 .1.3 that: (134) Λ( Y ′ )( a 1 ) = ǫ L,t ′ η R,s ′ : v 7→ M [ y ] | s ′ ( y ′ ) ∼ = x 1 # Aut ( y ) # Aut ( y , f , y ′ ) v and (135) Λ( Y ) = ǫ L,t η R,s So the compos ite is just (136) Λ( Y ′ ) ◦ Λ( Y ) = ( ǫ L,t ′ η R,s ′ ) ◦ ( ǫ L,t η R,s ) W e recall that Λ ( X ′ ) ◦ Λ( X ) is describ ed explicitly in (1 0 8) and Λ( X ′ ◦ X ) in (109). Finding these for the X i gives a total of four functor s here. W e next describ e natural transforma tions b etw ee n these. As shown in Theor em 5.2 .1, there are co mpa rison isomorphisms (137) β X i ,X ′ i : Λ ( X ′ i ) ◦ Λ( X i ) → Λ( X ′ i ◦ X i ) which will necessarily b e inv olved in the isomo r phism we are lo oking for. These derive fro m the α is omorphisms in the weak pullback in X ′ i ◦ X i . Comp osing with these comparison isomorphisms as in (131) gives: (138) (Id s ∗ 1 ◦ β X 1 ,X ′ 1 ◦ Id ( t ′ 1 ) ∗ )( ǫ L,t ′ η R,s ′ )( ǫ L,t η R,s )(Id s 2 ∗ ◦ ( β X 2 ,X ′ 2 ) − 1 ◦ Id ( t ′ 2 ) ∗ ) 34 JEFFREY C. MOR TON Now, the β isomo r phisms simply allow us to identify the spa ces here , so it suffices to descr ibe the maps, a nd in particular the co efficients which arise. At any presheaf G on A 1 , in the summand for [ a 1 ] ∈ A 1 and [ x ′ 1 ] ∈ X ′ 1 : (139) ( ǫ L,t η R,s ) : v 7→ X [ y ] | s ( y ) ∼ = x 1 1 # Aut ( y ) X g ∈ Aut ( x 1 ) g − 1 ⊗ g ( v ) which is a map b et w een spa ces of the form (107) asso ciated to X 1 and X 2 . Now this b ecomes the v ′ when we ta k e the full map b etw een spaces like (108), wher e we hav e: (140) ( ǫ L,t ′ η R,s ′ ) : v ′ 7→ X [ y ′ ] | s ′ ( y ) ∼ = x ′ 1 1 # Aut ( y ′ ) X h ∈ Aut ( x ′ 1 ) h − 1 ⊗ h ( v ′ ) so finally we get: (141) v 7→ X [ y ′ ] | s ′ ( y ) ∼ = x ′ 1 1 # Aut ( y ′ ) X h ∈ Aut ( x ′ 1 ) h − 1 ⊗ h X [ y ] | s ( y ) ∼ = x 1 1 # Aut ( y ) X g ∈ Aut ( x 1 ) g − 1 ⊗ g ( v ) which we wan t to show is the s ame as the natural transfo rmation asso ciated to Λ( Y ′ ◦ Y ): (142) Λ( Y ′ ◦ Y ) = ǫ L, ( t,t ′ ) ◦ η R, ( s,s ′ ) : Λ ( X ′ 1 ◦ X 1 ) → Λ( X ′ 2 ◦ X 2 ) which is a map b et ween t wo spaces of the form (109). This Y ′ ◦ Y : X ′ 1 ◦ X 1 → X ′ 2 ◦ X 2 is a spa n o f span ma ps whic h is given as follows. W e take the horizontal co mposite of the spans A 1 σ ← Y τ → A 2 and A 2 σ ′ ← Y ′ τ ′ → A 3 . This is a weak pullbac k taken up to isomorphism. The pullbac k s q uare commutes weakly , say up to ξ . Then the gro upoid Y ′ ◦ Y has maps into Y and Y ′ , and therefore by co mposition with s and s ′ , it has maps into X 1 and X ′ 1 . By the universal prop ert y of the weak pullback X ′ 1 ◦ X 1 , ther e is a map S : Y ′ ◦ Y → X ′ 1 ◦ X 1 . Similarly , there is T : Y ′ ◦ Y → X ′ 2 ◦ X 2 . W e ca n see what this is by ta k ing the weak pullback giving Y ′ ◦ Y , which we take to b e the comma category who s e ob jects are of the form ( y, f , y ′ ) wher e f : τ ( y ) → σ ′ ( y ′ ) in A 2 . Then the S and T given by the universal prop ert y are just S = ( s, s ′ ) giving ob jects like ( x 1 , f , x ′ 1 ) and T = ( t, t ′ ) giving ob jects like ( x 2 , f , x ′ 2 ). In particular, the morphis m f ∈ A 2 is left intact. (Different is o morphic c hoices for weak pullback could of course change f ). Given this, we ha ve, in the s ummand for a g iv en [ a 1 ] ∈ A 1 : and a particular [( x 1 , f , x ′ 1 )] ∈ X ′ 1 ◦ X 1 , we hav e: (143) η R, ( s,s ′ ) : v 7→ M [ y,f ,y ′ ] s ( y ) ∼ = x 1 s ′ ( y ′ ) ∼ = x ′ 1 1 # Aut ( y , f , y ′ ) X ( g,h ) ∈ Aut ( x,f , x ′ ) ( g , h ) − 1 ⊗ ( g , h )( v ) and then (144) ǫ L, ( t,t ′ ) η R, ( s,s ′ ) : v 7→ X [ y,f ,y ′ ] s ( y ) ∼ = x 1 s ′ ( y ′ ) ∼ = x ′ 1 1 # Aut ( y , f , y ′ ) X ( g,g ′ ) ∈ Aut ( x,f ,x ′ ) ( g , h ) − 1 ⊗ ( g , h )( v ) 2-VECTOR SP AC ES AND GROUPOIDS 35 So in fact, since we are in a weak pullback sq uare, the size of the automorphism groups in the t wo ex pr essions w e hav e found will b e in the s a me ratios, and so it bec omes clear that, using the β isomo r phisms as s een in the pro of o f Theorem 5.2.1: (145) Λ( Y ′ ◦ Y ) = β X 1 ,X ′ 1 (Λ( Y ′ )Λ( Y ))( β X 2 ,X ′ 2 ) − 1 as requir ed. 6.2. Co ordinate Descripti on of 2-Morphisms. In this section, we discuss the behaviour o f Λ o n 2-morphisms, namely the a ssignmen t of a na tural transformation to a span of span maps. As discussed in Section 4, a n y natur al tra nsformation betw een a pair of 2-linear maps b et w een KV 2-vector spaces can be r epresen ted as a matrix of linea r o perato rs, a s in (18). W e would like to describ e explicitly the linear maps c o mposing Λ( Y ) and some co ns equences. T o mo tiv ate the rest, w e can begin with the sp ecial case o f hom Span( FinGp d ) ( 1 , 1 ), where 1 is the trivial g roupo id with one ob ject (which we denote ⋆ ) and its iden tit y morphism. W e ca n summarize the effect of Λ on this hom- c ategory b y the following theorem: Theorem 6.2 .1. On hom Span( FinGp d ) ( 1 , 1 ) , the 2-funct or Λ , expr esse d in c o or di- nates, r epr o duc es gr oup oidific ation in the sense of (4). Pr o of. First, we note that Λ( 1 ) ∼ = V ect , since the only irr educible r epresen tation of the trivia l group (basis ob ject) is C itself. Since 1 is terminal in FinGp d , any group oid has a unique ma p into it. Thus, any spa n from 1 to 1 is of the fo rm: (146) 1 ! ← X ! → 1 which just amounts to a c hoice of X . Then Λ( X ) =! ∗ ! ∗ can be describ ed as a 1 × 1 matrix of vector spaces , Λ( X ) ( ⋆, C ) , ( ⋆, C ) = hom(! ∗ C , ! ∗ C ) (147) ∼ = M [ x ] ∈ X C (148) since ! ∗ C is the repr esen tation of X assig ning a c o p y of C to each ob ject. In particular, inducing up the r epresent ation C gives, at each x ∈ X , the repr e sen tation (149) C [ Aut ( ⋆ )] ⊗ C [ Aut ( x )] C = C since ! ∗ C , is the trivial represe n ta tion of Aut ( x ). F or ea c h isomorphism class in X , we th us get a co p y of hom C , C ∼ = C . This is the vector space asso ciated to X by gro upoidification. Similarly , a 2- morphism Y : X 1 → X 2 just amounts to an isomor phism cla ss of spans of group oids (since Y and the X i hav e unique maps to ! . Then the linea r map (150) Λ( Y ) ( ⋆, C ) , ( ⋆, C ) : Λ ( X 1 ) ( ⋆, C ) , ( ⋆, C ) → Λ( X 2 ) ( ⋆, C ) , ( ⋆, C ) just b ecomes a map (151) T ( Y ) : C [ X 1 ] → C [ X 2 ] given by T ( Y ) = ǫ L,t ◦ η R,s . By the above, (58), us ing F ( x 1 ) ∼ = C , can b e wr itten: 36 JEFFREY C. MOR TON (152) η R,s ( F )( y ) : C → M [ y ] | s ( y ) ∼ = x 1 C [ Aut ( x 1 )] ⊗ C [ Aut ( y )] C So now for e ac h [ x 1 ] ∈ X 1 , every y in the essential preimage of x 1 under s gets a copy o f the tr iv ial r epresent ation C for eac h cos et of I m ( Aut ( y )) in Aut (( x 1 ). This describ es a decomp osition of a representation of Aut ( y ) in terms of irreps (a ll of which are ne c e ssarily trivial in this case). Ca ll this representation G . In particular, a v ector in Λ X 1 ( ⋆, C ) , ( ⋆, C ) gives a complex n umber at eac h [ x 1 ]. The unit η R,s takes such a v ector v to, at each y w ith s ( y ) ∼ = x 1 , (153) 1 # Aut ( y ) X g ∈ Aut ( x 1 ) g − 1 ⊗ 1 By comm utativity for the spa n of s pan maps (whic h is necess arily strict here!), we a lso m ust hav e that (154) M [ y ′ ] | t ( y ′ ) ∼ = t ( y ) C [ Aut ( t ( y ))] ⊗ C [ Aut ( y ′ )] G ( y ′ ) ∼ = M [ y ′ ] | s ( y ′ ) ∼ = s ( y ) C [ Aut ( s ( y ))] ⊗ C [ Aut ( y )] C Similarly , then, using this (63) can b e written: (155) ǫ L,t ( G )( y ) : M [ y ′ ] | t ( y ′ ) ∼ = t ( y ) C [ Aut ( t ( y ))] ⊗ C [ Aut ( y ′ )] G ( y ′ ) → G ( y ) So now consider the vector v ∈ Λ( X 1 ) ( ⋆, C ) , ( ⋆, C ) which g iv es 1 at [ x 1 ] a nd 0 elsewhere. (That is, it gives the iden tity intert wining map b e tw een the copies of the representation ! ∗ C at ob jects in [ x 1 ] and the zero intertwiner elsewhere). Then the natura l tra ns formation induces a map on the co efficien t: (156) η R,s : v 7→ M [ y ] | s ( y ) ∼ = x 1 1 # Aut ( y ) X g ∈ Aut ( x 1 ) g − 1 ⊗ 1 but then suppose w e look for the coefficient of the result at [ x 2 ] ∈ X 2 . Only those y over [ x 2 ] will co n tribute, but then, s inc e the g − 1 hav e no effect on v ectors in C , we g et: (157) ǫ L,t : M [ y ] | s ( y ) ∼ = x 1 1 # Aut ( x 1 ) X g ∈ Aut ( x 1 ) g − 1 ⊗ 1 7→ X y | ( s,t )( y ) ∼ = ( x 1 ,x 2 ) # Aut ( x 1 ) # Aut ( y ) But this is just (158) # Aut ( x 1 ) X y | ( s,t )( y ) ∼ = ( x 1 ,x 2 ) 1 # Aut ( y ) = # Aut ( x 1 ) | \ ( x 1 , x 2 ) | where the second ter m is the gr oupoid cardinality of the essential preimag e of ( x 1 , x 2 ). This is just the co efficien t we find in groupo idification in the sense of Ba e z and Dolan. Similar calculations apply for less trivial situations as well, although for these we w ill require a little more of the r epresent ation theory o f the group oids A i . Lemma 6.2 . 2. Given a (strict) sp an b etwe en sp ans, Y : X 1 → X 2 , for X 1 , X 2 : A 1 → A 2 , then the n atur al tr ansformation (159) Λ( Y ) : Λ( X 1 ) → Λ( X 2 ) 2-VECTOR SP AC ES AND GROUPOIDS 37 is a natur al tr ansformation given by a matrix of line ar op er ators: (160) Λ( Y ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) : Λ( X 2 ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) → Λ( X 2 ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) or e quivalently Λ( Y ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) : M [ x 1 ] hom Rep (Aut( x 1 )) [ s ∗ 1 ( W 1 ) , t ∗ 1 ( W 2 )] (161) → M [ x 2 ] hom Rep (Aut( x 2 )) [ s ∗ 2 ( W 1 ) , t ∗ 2 ( W 2 )] Such that for e ach blo ck ([ x 1 ] , [ x 2 ]) , the c orr esp onding line ar op er ator b ehaves as fol lows: for f ∈ hom[ s ∗ 1 ( W 1 ) , t ∗ 1 ( W 2 )] we get: (162) Λ( Y ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) | ( x 1 ,x 2 ) ( f ) = | \ ( x 1 , x 2 ) | X g ∈ Au t( x 1 ) g − 1 f g wher e \ ( x 1 , x 2 ) is the essent ial pr eimage of ( x 1 , x 2 ) u nder ( s, t ) , namely the c omma c ate gory (( s, t ) ↓ ( x 1 , x 2 )) . Pr o of. The a r gumen t here is similar to that in Theorem 6.2 .1, except that we must deal with nont rivia l repr esen tations of the Aut ( x i ). That is, when we apply the Nak ay ama isomorphism, and the ev aluation ma ps , we ca nnot use triviality . The “group- a veraging” acting on intert wine r s in the expression we have given is exa ctly the ex terior trace used in the Nak ay ama isomor phism. Here its function is to pro ject a linear map (a “ pulled-bac k” in tertwiner) ont o a space of in tertwiners as w e push it along the functor t . In par ticular, the effect o f η R , s o n coo rdinates (i.e. choo sing particular re pr e- sentations W i ) is to take an in tertwiner f ∈ hom[ s ∗ 1 ( W 1 ) , t ∗ 1 ( W 2 )] and pro duce an int ertwiner at the representations pulled back to Y . The counit η L , t “pushes” this down to an in ter t winer in hom[ s ∗ 2 ( W 1 ) , t ∗ 2 ( W 2 )]. The group av er aging ensures this will b e an intert winer itself. Remark 6.2 .3. Using the formula for co mposition of 2-linear ma ps and natural transformatio ns in a ge ne r al 2-v ector space, we can readily see how ho rizon tal and vertical composition w ork. V ertical compositio n is given b y comp osition of linear maps compo nen t-wise, so we have: (163) Λ( Y ′ ◦ Y ) ([ a 1 ] ,W 1 ) , ([ a 2 ] ,W 2 ) with comp onents g iv en by b y: M ([ x 1 ] , [ x 3 ]) | \ ( x 1 , x 3 ) | X g ∈ Au t( x 3 ) g − 1 f g (164) = M ([ x 1 ] , [ x 3 ]) X [ x 2 ] | \ ( x 2 , x 3 ) | · | \ ( x 1 , x 2 ) | · # Aut( x 2 ) X g ∈ Au t ( x 3 ) g − 1 f g This uses the fact that the tw o gr oup av erag es each g ive pro jectio ns into spaces of intertwiners, which is redundant, so w e omit o ne, taking only the or der of the group. W e a lso use that \ ( x 1 , x 3 ) is a subgroup oid o f Y ′ ◦ Y . In fact, it is a union over all equiv alence classes [ x 2 ] in X 2 of the ob jects in the weak pullback Y ′ ◦ Y based ov er [ x 2 ], which gives the sum ov er [ x 2 ] (which p e rforms the matrix multiplication in each component). 38 JEFFREY C. MOR TON The horizontal compo site, Λ( Y ′ ◦ Y ) ∼ = Λ( Y ′ ) ◦ Λ( Y ), on the other ha nd, in- volv es “matrix multiplication” at the level of compo sition o f 2 -linear ma ps. The (([ a 1 ] , W 1 ) , ([ a 3 ] , W 3 )) component of the pro duct is a linear map given as a blo c k matrix with o ne blo c k for ea c h basis 2-vector. The blo c ks consist of the tensor pro ducts of the matrice s from the comp onents of Λ( Y ) and Λ( Y ′ ). In par ticular, the β iso mo rphisms from the horizontal comp osition of source and targe t induce an isomor phism which acts on in ter t winers ι ⊗ ι ′ by: M ([ x 1 ,f 1 ,x ′ 1 ]) ([ x 2 ,f 2 ,x ′ 2 ]) | \ (( x 1 , x ′ 1 ) , ( x 2 , x ′ 2 )) | X ( g,g ′ ) ∈ Aut([ x 1 ] , [ x ′ 1 ]) ( g , g ′ ) − 1 ι ⊗ ι ′ ( g , g ′ ) (165) ∼ = M ([ a 2 ] ,W 2 ) M ([ x 1 ] , [ x 2 ]) | \ ( x 1 , x 2 ) | X g ∈ Au t ( x 1 ) g − 1 ιg ⊗ M ([ x ′ 1 ] , [ x ′ 2 ]) | \ ( x ′ 1 , x ′ 2 ) | X g ′ ∈ Aut( x ′ 1 ) ( g ′ ) − 1 ι ′ g ′ = M ([ a 2 ] ,W 2 ) M ([ x 1 ] , [ x 2 ]) ([ x ′ 1 ] , [ x ′ 2 ]) | \ ( x 1 , x 2 ) | · | \ ( x ′ 1 , x ′ 2 ) | X ( g,g ′ ) ∈ Aut( x 1 ) × Aut( x ′ 1 ) ( g , g ′ ) − 1 ι ⊗ ι ′ ( g , g ′ ) Here, w e note that since Y ′ ◦ Y is a weak pullba ck o ver A 2 , its ob jects consist of triples ( y, h, y ′ ), we implicitly hav e a sum ov er [ y, h, y ′ ] in the g roupo id cardinality , which is | \ ( x 1 , x 2 ) | · | \ ( x ′ 1 , x ′ 2 ) | · | Aut( a 2 ). 7. Main Theorem Having now describ ed the effect of the functor Λ at each level - g roupo ids, spans, and spa ns of spans—it remains to chec k that these re ally define a 2-functor of the right kind. W e begin by explicitly laying out wha t this 2-functor is, then v erify the remaining prop erties. 7.1. The 2-Linearization F unctor. W e hav e b een defining the maps inv olved in Λ througho ut the la st few sections, so he r e w e collect the full definition in one place. Definition 7 .1.1. The 2-line arization pr o c ess Λ : Spa n( FinGpd ) → 2V ect is de- fine d as fol lows: • F or an essential ly finite gr oup oid A it assigns: (166) Λ( A ) = [ A, V ect ] • F or a sp an of gr oup oids: (167) A s ← X t → B it assigns: (168) Λ( S ) = t ∗ ◦ s ∗ 2-VECTOR SP AC ES AND GROUPOIDS 39 • F or a (strictly c ommuting) sp an of maps b etwe en two sp ans with the same sour c e and tar get: (169) X 1 s 1 ~ ~ } } } } } } } } t 1 A A A A A A A A A Y s O O t B X 2 s 2 ` ` A A A A A A A A t 2 > > } } } } } } } } Λ assigns a natur al tr ansformation: (170) Λ( Y ) = ǫ L,t ◦ η R,s : ( t 1 ) ∗ s ∗ 1 = ⇒ ( t 2 ) ∗ s ∗ 2 (and analo gously for we akly c ommuting sp ans of maps as in Defin it ion 6.1.1) Λ also asso ciates the fol lo wing: • F or e ach c omp osable p air X : A 1 → A 2 and X ′ : A 2 → A 3 , a natur al iso- morphism (171) β : Λ( X ′ ◦ X ) → Λ( X ′ ) ◦ Λ( X ) , as describ e d in The or em 5.2.1. • F or e ach obje ct X ∈ Fi nGpd , the natur al t r ansformation (172) U B : 1 Λ( B ) ∼ → Λ (1 B ) is the natur al tr ansformation induc e d by the e quivalenc e b etwe en B and 1 B . Then we hav e the following: Theorem 7.1.2. The c onstruction given in Defin itio n 7.1.1 defines a we ak 2- functor Λ : Span( FinGp d ) → 2V ect . Pr o of. First, we note that b y the r esult o f Lemma 4.1.1, w e know tha t Λ assigns a 2-vector s pace to each ob ject of Spa n( FinGpd ). If S : B → B ′ span of essentially finite group oids—i.e. a mor phism in Span( FinGp d ), the map Λ( S ) defined in Definition 5.1.1 is a linear functor by the result of The- orem 4.2.1, since it is a comp osite of tw o linear maps. This respe c ts compo s ition of morphisms, as sho wn in Theorem 5.2.1, and of 2- mo rphisms in b o th ho rizon tal and vertical directions, as shown in Theor ems 6.1.3 and 6.1.4. Next w e need to c heck that our Λ sa tis fie s the remaining pr o perties of a w eak 2- functor: that the is o morphisms from the w eak pre serv ation of compos ition and units satisfy the requisite coherence conditions; and that Λ strictly pr eserves horizontal and vertical compos ition of natural tra nsformations. The coher ence c o nditions for the composito r mo rphisms (173) β S,T : Λ ( T ◦ S ) → Λ( T ) ◦ Λ( S ) 40 JEFFREY C. MOR TON and the asso ciator say that these must mak e the following diagram comm ute for all comp osable triples ( X , X ′ , X ′′ ): (174) Λ( X ′′ ) ◦ Λ( X ′ ) ◦ Λ( X ) Λ( X ′′ ◦ X ′ ) ◦ Λ( X ) Λ(( X ′′ ◦ X ′ ) ◦ X ) Λ( X ′′ ◦ ( X ′ ◦ X )) Λ( X ′′ ) ◦ Λ( X ′ ◦ X ) 1 ⊗ β 2 , 1 6 6 n n n n n n n n n n n n n n n β 3 , 2 ⊗ 1 h h P P P P P P P P P P P P P P P β 3 , 21 V V , , , , , , , , , , , , β 32 , 1 H H Λ( α X ′′ ,X ′ ,X ) / / W e implicitly assume her e a trivia l asso ciator for the 2-linear maps in the expr es- sion Λ( X ′′ ) ◦ Λ( X ′ ) ◦ Λ( X ). This is b ecause each 2-linea r ma p is just a comp osite of functors, so this comp osition is a ssocia tiv e. But note that we can similarly a ssume, without loss of generality , that the a s sociato r α for compo sition of spans is trivial. The compo site X ′ ◦ X is a weak pullback. This is only defined up to isomorphism, but one c a ndidate is the comma categor y for an y x ∈ A 2 . Any other candidate is isomorphic to this one. But then, the asso ciator (175) α X ′′ ,X ′ ,X : Λ ( X ′′ ◦ ( X ′ ◦ X )) → Λ(( X ′′ ◦ X ′ ) ◦ X ) is just given by the obvious c a nonical map betw een the comma catego ries. In particular, b oth compos ites give comma categ o ries whose ob jects are determined by choices ( x, f , x ′ , g , x ′′ ) wher e f : t 1 ( x ) → s 2 ( x ′ ) and g : t 2 ( x ′ ) → s 3 ( x ′′ ), and whose morphisms are triples of morphisms in X × X ′ × X ′′ making the appropriate diagrams c omm ute. Howev er, these co mma catego ries are defined in terms of pair s, with differ e n t parenthesizations. So α X ′′ ,X ′ ,X is the evident isomorphis m betw een these comp osites. So it suffices to show that, up to this iden tification: (176) (1 ⊗ β X ′ ,X ) ◦ β X ′′ ,X ′ ◦ X = ( β X ′′ ,X ′ ⊗ 1) ◦ β X ′′ ◦ X ′ ,X The β is omorphisms are given b y the α up to which the weak pullbacks comm ute, and so ar e given by choices o f the functions f ∈ A 2 and g ∈ A 3 in the comma categorie s. The assoc iator is o morphism induces an corr esponding isomorphism b e- t ween these compo site β maps by the corr espondence b et ween the choices o f f and g in the pullbac k squar es o n eac h side of this equation. So indeed, this is true. In gener al, the coherence conditions for the “unit” iso morphism (177) U A : 1 Λ( A ) ∼ → Λ (1 A ) 2-VECTOR SP AC ES AND GROUPOIDS 41 which accomplishes w eak pr eserv ation of identit ies, say that it must ma ke the fol- lowing co mm ute for any span X : A 1 → A 2 : (178) Λ( X ) Λ( X ) ◦ Λ(1 A 1 ) 1 ⊗ U A 1 O O Λ( X ◦ 1 A 1 ) Λ( r X ) e e L L L L L L L L L L L L L L L L L L L L L β X, 1 A 1 o o where r A 1 is the right unitor for A 1 . There is also the symmetric c o ndition for the left unitor. W e notice that, as with Λ(1 A 1 ), Λ( r A 1 ) is equiv alent to the identit y . The map r X : X ◦ 1 A 1 → X is the canonica l iso morphism taking comp osition of X with an ident ity span to X which is just a pro jection fr o m a comma catego r y . Since X ◦ 1 A 1 and X ar e th us isomorphic, . So the condition amounts to the fact that β X, 1 A 1 : Λ ( X ◦ 1 A 1 ) → Λ( X ) ◦ Λ(1 A 1 ) = Λ( X ) is equiv alent to the iden tity in s uc h a w ay that (17 8) comm utes. But this is immediate since this β map is being applied to a n iden tit y span. 8. Ackno wledgements The author would lik e to reco gnize the inv aluable assis tance o f John Bae z , whose advice a nd guida nce made poss ible the Ph.D. thesis work which led to this pro ject; to ac knowledge the useful discussions with and help of James Dolan, Derek Wise, Alex Hoffnung, Jamie Vicar y , and Dan Christensen; a nd to the editors and referees whose copio us sug g estions greatly improv ed the mater ia l a nd its presentation. Appendix A. Weak Preser v a tion of Composition In this app endix, w e give some background to the definition of comp osition of spans of g roupo ids, namely comma categ ories. W e also give a note on a key element of the proo f of Theore m 5.2.1, which states that the putativ e 2 -functor Λ weakly preserves this c omposition. W e rely o n the fact that a pullback squar e of g roupoids gives rise to a sq uare of 2 -linear maps, which satisfies the Beck-Chev alley condition. W e discuss this here a s w ell. A.1. Bac kground on Comma Categories. W e now r ecall some facts ab out comma categories , whic h pla y a role in our construction of our 2- functor Λ in the comp osition of spans of group oids, via weak pullback. Definition A. 1.1. Given a diagr am of c ate gories A F → C G ← B . Then an obje ct in the c omma c ate gory ( F ↓ G ) c onsists of a triple ( a, f , b ) , wher e a ∈ A and b ∈ B ar e obje cts, and f : F ( a ) → G ( b ) is a morphism in C . A morphism in ( F ↓ G ) fr om ( a 1 , f 1 , b 1 ) to ( a 2 , f 2 , b 2 ) c onsists of a p air of morphisms ( h, k ) ∈ A × B making the 42 JEFFREY C. MOR TON squar e (179) F ( a 1 ) f 1 / / F ( h ) G ( b 2 ) G ( k ) F ( a 2 ) f 2 / / G ( b 2 ) c ommut e. Remark A.1.2. Note that in a weak pullbac k, the morphisms f would b e required to b e an isomorphism , but when we are talking a b out a weak pullback of g roupoids, these conditions a r e the same. The comma c a tegory has pro jection functors which complete the (weak) pullback square for the t wo pro jections: (180) ( F ↓ G ) P A { { w w w w w w w w w P B # # G G G G G G G G G A F $ $ H H H H H H H H H H α ∼ + 3 B G { { v v v v v v v v v v C such that ( F ↓ G ) is a universal o b ject (in Cat ) with maps into A and B making the resulting sq uare comm ute up to a natura l isomorphism α . This satisfies the universal condition that, g iv en an y other categ ory D with maps to A and B , there is an equiv alence b et ween [ D , C ] and the c omma categor y ( P ∗ A , P ∗ B ) (where P S ∗ and P T ∗ are the functors from D to B which factor through P S and P T resp ectiv ely). This is the w eak form of the universal proper t y of a pullback. So supp ose we restrict to the ca se of a weak pullba c k o f gr oupoids. This is equiv alent to the situation where A , B and C are skeletal - that is, each is just a disjoint union of gr oups. Then the set of o b jects of ( F ↓ G ) is a disjoint unio n ov er all the morphisms of C (whic h a re all of the form g : x → x for some ob ject x ) of all the pairs of ob jects a ∈ A and b ∈ B with g : F ( a ) → G ( b ). In particular, since we a ssume C is skeletal, this means F ( a ) = G ( b ), though ther e will be an instance of this pa ir in ( F ↓ G ) for each g in the gr oup of morphisms on this o b ject F ( a ) = G ( b ). So as the s et of ob jects in ( F ↓ G ) w e ha ve a disjoin t union of pr oducts o f sets— for each c ∈ C , we get | Aut ( c ) | copies of F − 1 ( c ) × G − 1 ( c ). The set of morphisms is just the collection of co mmuting squares as in (179) ab ov e. Note that if w e choose a pa r ticular c and g : c → c , and cho ose ob jects a , b with F ( a ) = c , G ( b ) = c , and if H = Aut( a ), K = Aut( b ) and M = Aut( c ), then the group of automorphisms of ( a, g , b ) ∈ ( F ↓ G ) is iso morphic to the fibr ed pr oduct H × M K . In pa r ticular, it is a subgroup of the pro duct group H × K consisting of only those pairs ( h, k ) with F ( h ) g = g G ( k ), or just F ( h ) = g G ( k ) g − 1 . W e can call it H × M K , keeping in mind that this fibred pro duct dep ends on g . Clearly , the group of automorphisms of tw o isomorphic ob jects in ( F ↓ G ) a re isomorphic groups. Now, as we saw when discuss ing comma squares , the ob jects o f the weak pullback X ′ ◦ X c o nsist of pair s of ob jects, x ∈ X , a nd x ′ ∈ X ′ , to gether with a morphism in 2-VECTOR SP AC ES AND GROUPOIDS 43 A 2 , g : t ( x ) → s ′ ( x ′ ). The mor phis ms from ( x 1 , g 1 , x ′ 1 ) to ( x 2 , g 2 , x ′ 2 ) in the w eak pullback are pairs of morphisms , ( h, k ) ∈ X × X ′ , making the square (181) t ( x 1 ) g 1 / / t ( h ) s ′ ( x ′ 2 ) s ′ ( k ) t ( x 2 ) g 2 / / s ′ ( x ′ 2 ) commute. W e may assume that the gr oupoids we beg in with are skeletal—if not, we replace the gr oupoid with its skeleton, so the ob jects a re just iso morphism classes of the original ob jects. Then reca ll from Sec tio n 5.1 that in this w eak pullback the set of ob jects in X ′ ◦ X is a disjo in t union of pro ducts of sets - for each a ∈ A 2 , we get | Aut ( a ) | copies of t − 1 ( a ) × ( s ′ ) − 1 ( a ). A.2. The Beck Conditi on. Remark A.2.1. The isomorphism α in the weak pullba ck squa re (11) ga ve rise to a natural is omorphism: (182) α ∗ : T ∗ ◦ ( s ′ ) ∗ → S ∗ ◦ t ∗ Given an ob ject in the comp osite X ′ ◦ X , α gives an iso mo rphism of the tw o restrictions to A 2 , throug h X a nd X ′ . What we pro ved is that the o ther sq uare—the “mate” under the adjunctions, also has a natural iso mo rphism (“vertically” across the squar e), namely that there exists: (183) β X,X ′ : T ∗ ◦ S ∗ → ( s ′ ) ∗ ◦ t ∗ In fact, these are related by the units for bo th pairs of adjoin t functors: (184) η R,T : 1 Λ( X ′ ◦ X ) → T ∗ ◦ T ∗ and (185) η R,t : 1 Λ( X ) → t ∗ ◦ t ∗ So the desired “ v ertical” natural transformation acro ss the squar e (80) is deter - mined by the condition that it co mplete the following squa re of natural transfor- mations to make it commute: (186) T ∗ ◦ S ∗ 1 ⊗ η R,t + 3 β X,X ′ T ∗ ◦ S ∗ ◦ t ∗ ◦ t ∗ 1 ⊗ ( α ∗ ) − 1 ⊗ 1 ( s ′ ) ∗ ◦ t ∗ 1 ⊗ η R,T + 3 T ∗ ◦ T ∗ ◦ ( s ′ ) ∗ ◦ t ∗ The crucial element o f this is the fact that the (w eak) pullback square for the group oids in the middle of the comp osition diag ram g ives r is e to a (weak) pullback square o f V ect -presheaf categories. This is s ho wn by Ross Street [1 8]. T his is the Be ck-Cheval ley (BC) condition, whic h is discussed b y B´ enab ou and Stre ic her [5], MacLane and Mo erdijk [14], and b y Dawson, Par ´ e and Pro nk [7]. 44 JEFFREY C. MOR TON References [1] Ba ez, J. Higher-dimensional algebra I I: 2-hilb ert spaces. Ad v. Math. 127 (1997), 125–189. [2] Ba ez, J. Higher-dimensional algebra VII: Group oidificat ion. http://m ath.ucr.edu/ home/baez/hda7.pdf . [3] Ba ez, J., and Crans, A. Hi ghe r-di mensional algebra VI: Li e 2-algebras. The ory and Appli- c ations of Cate gories 12 (2004 ), 492–5 28. [4] Ba ez, J., and Dolan , J. F rom finite s et s to Feynman diagrams. In Mathematics Unlimite d - 2001 A nd Beyond (2001), B. Engquist and W. Sc hmid, Eds., Springer V erlag. Preprin t at arXiv:ma th.QA/000413 3 . [5] B ´ enabou, J ., and Streicher, T. Beck-Chev alley condition and exact squares. Unpublished. [6] Ben son, D. R epr esentati ons and Cohomo lgy I: Basic r epr esentation t he ory of finite gr oups and asso ci ati ve algebr as . Cambridge studies in adv anced mathematics. Cambridge Universit y Press. [7] Da wson, R. J. M., P ar ´ e, R., and Pronk, D. A. Universal prop erties of span. The ory and Applic ations of Cate gories 13 , 4 (2004), 61–85. [8] Elgu et a, J . Generalized 2-vec tor spaces and general li near 2-groups. J. Pur e Appl. Al g. 21 2 (2008), 2067–2091 . [9] Freyd, P. Ab elian Cate gories: An Intr o duction to the The ory of F unct ors . Harp er & Ro w, 1964. [10] Kapra no v, M., and Vo evodsky, V. 2-cate gories and Zamolo dc hiko v tetrahedron equations. Pr o c. Symp. Pur e Math 56 Part 2 (199 4), 177 –260. [11] Lauda, A. D. F rob enius algebras and ambidextrous adjunctions. The ory and Applic ations of Cate gories 16 , 4 (2006), 84–1 22. [12] La wvere, W. F. F unctorial Semantics of Algebr aic The ories and Some A lgebr aic Pr oblems in the Context of F unctorial Semantics of Algebr aic The ories . PhD thesis, Columbia U niv er- sity , 1963. Reprinted i n Theory and Applications of Categ ories, 2004 . [13] MacLane, S. Cate gories for the Working Mathematician . No. 5 in Graduate T exts in Math- ematics. Spri nge r, 1971. [14] MacLane, S., a nd Moerdijk, I . She aves in Ge ometry and L o gic: A First Intro duction to T op os The ory . Universitext . Springer V erlag, 1992. [15] Mor ton, J . C. Extende d TQFT’s and Q uantum Gr avity . PhD thesis, U ni v ers it y of California, Riverside, 2007. arxiv:math/0 710.0032 . [16] P anchadchara m , E. Cate gories of Mack ey F unctors . PhD thesis, Macquarie Universit y , 2006. [17] S ternb er g, S. Gr oup the ory and physics . Cam bridge Universit y Press, 1994. [18] S treet, R. Enriched categories and cohomology . Quaestiones Mathematic ae 6 (1983), 265– 283. Reprints in Theory and Applications of Categories. Ma thema tics Dep ar tment, University of Western Ont ario E-mail ad dr ess : jeffrey.c.mo rton@gmail.com
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment