Repeating Patterns in Linear Programs that express NP-Complete Problems
One of my recent papers transforms an NP-Complete problem into the question of whether or not a feasible real solution exists to some Linear Program. The unique feature of this Linear Program is that though there is no explicit bound on the minimum r…
Authors: Deepak Ponvel Chermakani
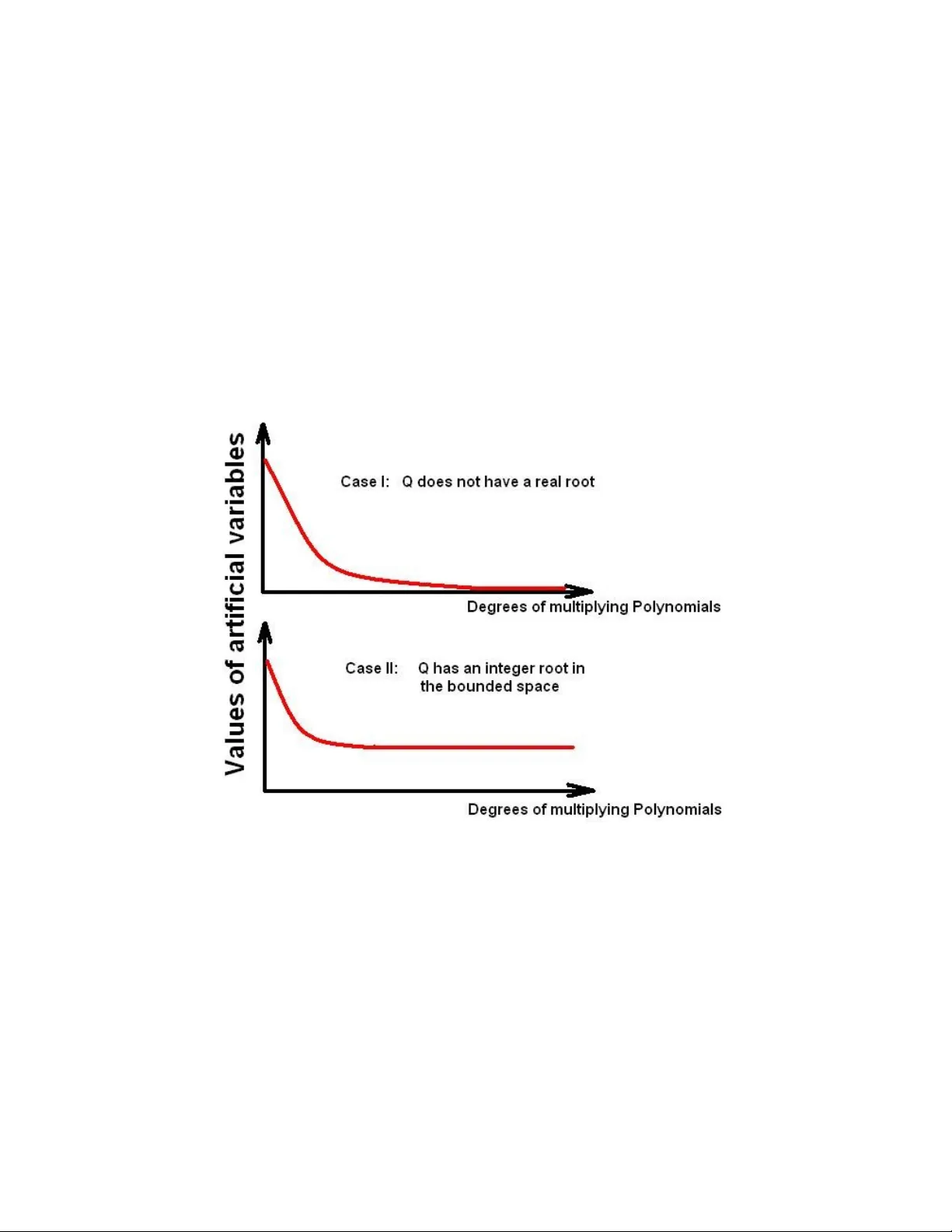
, such that every coe fficient of P(x)Q(x) is non-negati ve, and that the coefficient of 1 in P(x)Q (x) is greater than or equal to 1. This change from strictly positive inequalities to inequalitie s of non- negativity is achieved by dividing throughout b y the product of the co efficient of 1 in Q(x) with the coefficie nt of 1 in P(x) that was originall y assumed to be positive. Th us, the Proble m of deciding whether or not Q(x) has a positive real ro ot, can be expressed as a Standard Linear Progra mming (LP) Feasibility Prob lem. A feasible LP Solution exists, if and onl y if, Q(x) does not have a positive real root [2]. For example, consider Q( x) = (x-1) 2 (x-2) 2 + 1 = x 4 – 6x 3 + 13x 2 – 12x + 5. Our correspondin g LP i s defined by the following ineq ualities, in addition to the non-negativity co nstraints on all variables, i.e. p i ≥ 0, for all i as integers in [ 0 , N ]: 5p 0 ≥ 1 - 12p 0 + 5p 1 ≥ 0 13p 0 - 12p 1 + 5p 2 ≥ 0 - 6p 0 + 13p 1 - 12p 2 + 5p 3 ≥ 0 1p 0 - 6p 1 + 13p 2 - 12p 3 + 5p 4 ≥ 0 1p 1 - 6p 2 + 13p 3 - 12p 4 + 5p 5 ≥ 0 1p 2 - 6p 3 + 13p 4 - 12p 5 + 5p 6 ≥ 0 1p 3 - 6p 4 + 13p 5 - 12p 6 + 5p 7 ≥ 0 1p 4 - 6p 5 + 13p 6 - 12p 7 + 5p 8 ≥ 0 ............................. .......................... ............................. .......................... 1p N-7 - 6p N-6 + 13p N-5 - 12p N-4 + 5p N-3 ≥ 0 1p N-6 - 6p N-5 + 13p N-4 - 12p N-3 + 5p N-2 ≥ 0 1p N-5 - 6p N-4 + 13p N-3 - 12p N-2 + 5p N-1 ≥ 0 1p N-4 - 6p N-3 + 13p N-2 - 12p N-1 + 5p N ≥ 0 1p N-3 - 6p N-2 + 13p N-1 - 12p N ≥ 0 1p N-2 - 6p N-1 + 13p N ≥ 0 1p N-1 - 6p N ≥ 0 In the above, onl y the top 4 and the botto m 4 inequalities have a unique structure, while the remainin g inequalities have a repeating structure. Here, 4 happe ns to be the degree of Q(x), b ut in general, if N and d represent the degrees o f P(x) and Q(x) respectively, we will have 2d inequalities with a unique structure, and N-2d inequalities with a repeating structure. This makes it possible to give an efficient definition to the ineq ualities, even as N is conveniently assu med to tend to infinity. Setting N to tend to a number larger than req uired, does not cause an y harm because, if Q(x) does not ha ve a positive real roo t and if r denotes the minimum required degree of P(x) such that P(x)Q(x) has non-neg ative coefficient s, then an LP Solver can choose p i = 0 for all i as integers in [ r+1 , N ]. Also, if Q(x) has a positive real root, then by Descartes Rule o f Signs, there cannot exist a real Pol ynomial P(x), such that P(x)Q(x) has non-negative coefficient s. The figure below plots feasibility (‘1’ means that a feasible LP soluti on exists, while ‘0 ’ means that there is no feasible LP solution) versus the degree o f P(x). 1.2 Expressing 3-SAT as a Linear Prog ram, via the mentioned develop ment on the univariate Polynomial 3-SAT is a well-known NP- Complete Prob lem that aims to decide on w hether or not a Boolea n expression is satisfiable, w ith a maximum of 3 literals per cla use. Let us denote a 3 -SAT instance to have k clauses and u binary variables. 3-SAT has been transfor med into the prob lem of deciding real root existence for a univariate Polyno mial Q(x) [4]. So going by t he logic mentioned in the Section 1.1, we can obtain the corresponding LP expressing the 3-SAT instance. However, it is difficult to study this LP because of the following three properties of Q(x) obtained fro m the 3-SAT instance: 1) the degree of Q(x) is expone ntial to k and u 2) Q(x) is usually not sparse, though it can be efficie ntly expressed as a Straight Line Program (A Straight Line Program is a set o f instructions to describe a Polynomial) 3) the coefficients o f Q(x) are exponential to k and u 1.3 Previous relat ed development on the multivariate Polyno m ial Given a u -variate ( u > 1 ) integer Polyno mial Q, it has been shown that not all instanc es of Q (without a real root) can be multiplied by another Polynomial, to give a resultant Polynomial with positive coefficients [3]. The same author also described a transformation that maps every instance of Q w ithout a real root, in the standard Simplex and the standard Hypercube, onto some Pol ynomial with positive coefficient s [3]. However, it is to be noted that there also exist Polynomials with real roots that can be mapped o nto Polynomials with positive coefficients, b y this transformation. 2. The New Development on the multivariate Polynomial To the best of my knowledge, Theor em-7 of my paper [2] is the first robust theoretical development for a u -variate ( u > 1 ) integer Polynomial Q, where Q is constrained to either have integer roots in a bounded region, or not have a real root. It can be inferred that T heorem-7 can be generalized over a finite s et of positive real numbers as follows. 2.1 Generalization of Theorem-7 of m y paper [2] o ver a finite Set of positiv e Real numbers Let N be a finite Set o f positive Real numbers, i. e. N = {n 1 , n 2 , ... n M }. Let a multi variate P olynomial Q defined in u -variables x 1 , x 2 , ... x i ,...x u , be such t hat exactly one of the followin g two statements, is true: 1) “Q = 0” implies that x i ∈ N, for all integers i i n [ 1 , u ] 2) Q does not have a real ro ot Next, define constant Polynomials P 1 , P 2 , ... P i ,...P u , w here P i = ((x i – n 1 ) (x i – n 2 )... (x i – n M )) 2 . Then the generalization of the Theorem is that Q does not have a real root, if and only if, there exist real u -variate Pol ynomials K, K 1 , K 2 , ... K u , such that the following Polynomial has positive coefficie nts: - QK + P 1 K 1 + P 2 K 2 + ...+ P u K u . 2.2 Expressing 3-SAT as a Linear Prog ram, via the new develop m ent The three step proced ure in Section-4 of my paper [2 ] derives a u -variate Polynomial Q from a 3-SAT instance, s uch that this Q satisfies exactl y one of t he previous two statements mentioned in Section 2.1, where the finite Set N = {1,2}. As a result of Theorem-7, we can now trans form 3-SAT into a Po lynomial with positive coefficients, if a nd only if, it is not satisfiable. We follow a similar logic mentioned in the Section 1.1, in which we transformed t he prob lem of deciding real root existence for a univariate Polyno mial into a feasibility problem in a LP. We define the real pol ynomials K, K 1 , K 2 , ... K u in terms of variable coefficients, just like how we defined P(x) in Section 1.1. But there is a small difference here, because the coefficients of P(x) were non-negative, but those of K, K 1 , K 2 , ... K u are real. For example, assuming that Q is bivariate , then define the Polynomial K 2 = K 2_00 + K 2_01 x 2 + K 2_10 x 1 + K 2_02 x 2 2 + K 2_11 x 1 x 2 + K 2_20 x 1 2 + . ...+ K 2_ij x 1 i x 2 j +...... + K 2_AB x 1 A x 2 B , where A and B are natural n umbers tending to i nfinity, and where K 2_ij is a real variab le, for each of the no n-negative integers i and j , where i represe nts the po w er of x 1 and j represen ts the power of x 2 . Note now that a real variable can easily be represented as two LP variables constrained to be non-negati ve, for exa mple, replace K 2_ij with K 2_ij_positive – K 2_ij_negative , where both variables K 2_ij_positive and K 2_ij_negative are non-negative. Similarly define the Polynomials K and K 1 with variable coefficients. Ne xt, we state that ever y term of the res ulting expression, is non-negative. Finally we state that the coe fficient of 1 in the resulting expr ession is greater than or equal to 1. Thus, Theorem-7 o f my pa per [2] can be viewed as transforming any instance of 3-SAT into a feasibility prob lem in a LP. A feasible LP solution exists, if and only if, the 3-SAT instance is not satisfiable. It can be inferred that this LP w ill have the following four proper ties: 1) the number of unique coefficients i n each inequality is bounded by 27k , 2) the magnitude of each these co efficients is bounded by 64k , 3) the number of mono mial terms in each of the inequalities i s bounded by ku , and, 4) the minimum required number of linear inequalities (which is prop ortional to the required degrees of the Polynomials K, K 1 , K 2 , ... K u ) is most prob ably exponentia l to k and u in the worst case (though I proved that this number e xists, I do not know how it grows). Next, even if t he number o f linear inequalities is conve niently assumed to tend to infinity (which will not change the feasibility result for the LP), the entire LP can still be defined efficiently, by the same logic d escribed in Section 1.1. As the best LP algorithms are weakly-pol ynomial, the above mentioned prop erties of this LP make it more attractive for determining feasibility, compared to the LP derived from the univariate appro ach mentioned in Section 1. This LP too has a repeating structure, which would take up too much space to show on this paper. However, one can verify this and conclude that there is such a repeating structure, which is more complex and beautiful than the simple repeating structure of the LP of Section 1. 3. Conjectures that might help in proving P=NP Given the LP formulation s obtained, either from the univariate Polynomial deri ved from 3-SAT as described in Sec tion-1, or from the multivariate Polynomial derived from 3-SAT as described in Section-2, one could identify Patterns, and investigate the situations when we are able to make an efficient decision on feasibility for the LP. Mentioned belo w are some of the techniques one could use to investigate how to make efficient decisions on the feasib ility problem for the LP. 3.1 Extrapolation o f the optimal Artificial Variables fro m the LP solutions One way of doing this would b e to stud y patterns in t he solutions o btained by a n LP Solv er, as the degrees of the multiplyin g Polynomials (i.e. P(x) in the case of the approach in Section-1, or the Polyno mials K, K 1 , K 2 ...K u in the case of the approach in Section-2) are iteratively increased. Patterns can be studied in the behavio ur of the reduced cost s of the optimal variables, and the op timal values of the artificial variables introduced into the LP. Note that t he artificial variable technique in LP, is to introduce positive artificial variables into the inequalities, and then the LP is concluded to be feasible, if and only if, all artificial variables become zero , at the end of the LP runs. Belo w is a diagra m of how I expect the optimal values of the artificial variables to behave, decreasing continuously with respect to the degrees of the multiplying Pol ynomials. So by getting the initial few values o f the artificial variables, one could extrapolate and determine how future values o f the artificial variables could behave. 3.2 Conjecture o n the asymptotic converg ence of the optimal Artificial v ariables Another way would be to develop a novel appro ach to deter mine feasibility, as the degree s of the multiplying Polynomials are conveniently assu med to tend to infinity, by using concepts of how some sequences converge. Note that like the univariate case described in Section-1, it is harmless to use higher-tha n-required degrees of the multiplying Polynomials K, K 1 , K 2 ...K u to obtain the Linear Program. Also, the Linear Program of Section 2 can be defined efficiently even though the degrees of K, K 1 , K 2 ...K u are conveniently assu med to tend to infinity. Prob ably, kno wledge of how some sequences converge asymptotically [5] , would help in this. I conjecture that the summatio n of optimal artificial variables should: 1) Become equal to zero, if Q do es not have a real root, as the degrees of the multiplying Po lynomials tend to infinity 2) Asymptotically te nd to a positive real, if Q = 0, as the d egrees of the multiplying Po lynomials tend to infinity References [1] D.R. Curtiss, Recent Extensions of Descartes Rule of Signs , Annals of Mathematics, Volume 19, No 4, pp 251-278, Jun-1918. [2] Deepak Ponvel Chermakani, Another approach to d ecide on real root existence for univariate Polynomials and a multivariate extension for 3-SAT [3] David Handelman, Positive Polynomials and product type actions of Compact Groups , Mem oirs of the American Mathematical Society, Number 320, Volume 54, Mar-1985. [4] Daniel Perrucci, Juan Sabia, Real root s of univariate Polynomials and Straight Line Programs , Volume 5, Issue 3, Journal o f Discrete Algorithms, pages 471-478, Sep-2007. [5] David Moews, Asymptotic behaviour of Rauzy’s Sequence , http://djm.cc/dmoews/rauzy.pdf, Aug-2002. About the Author I, Deepak Ponvel Cherm akani, have written this paper, out o f my own interest and initiative, during my spare time. I am currently a stu dent at the University of Edinb urgh UK (www.ed.ac.uk), where since Sep-2009, I have been enrolled in a fulltime one year Master Degree course in Operations Research with Computational Optimization . In Jul-2003, I completed a four year fulltime four year Bachelor Degree course in Electrical and Electronic Engineering , from Nanyang Technological University Singapore (www.ntu.edu.sg). I completed my high schooling from the National Public School in Bangalore in India in Jul-1999.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment