Direction-of-Arrival Estimation for Temporally Correlated Narrowband Signals
signal direction-of-arrival estimation using an array of sensors has been the subject of intensive research and development during the last two decades. Efforts have been directed to both, better solutions for the general data model and to develop mo…
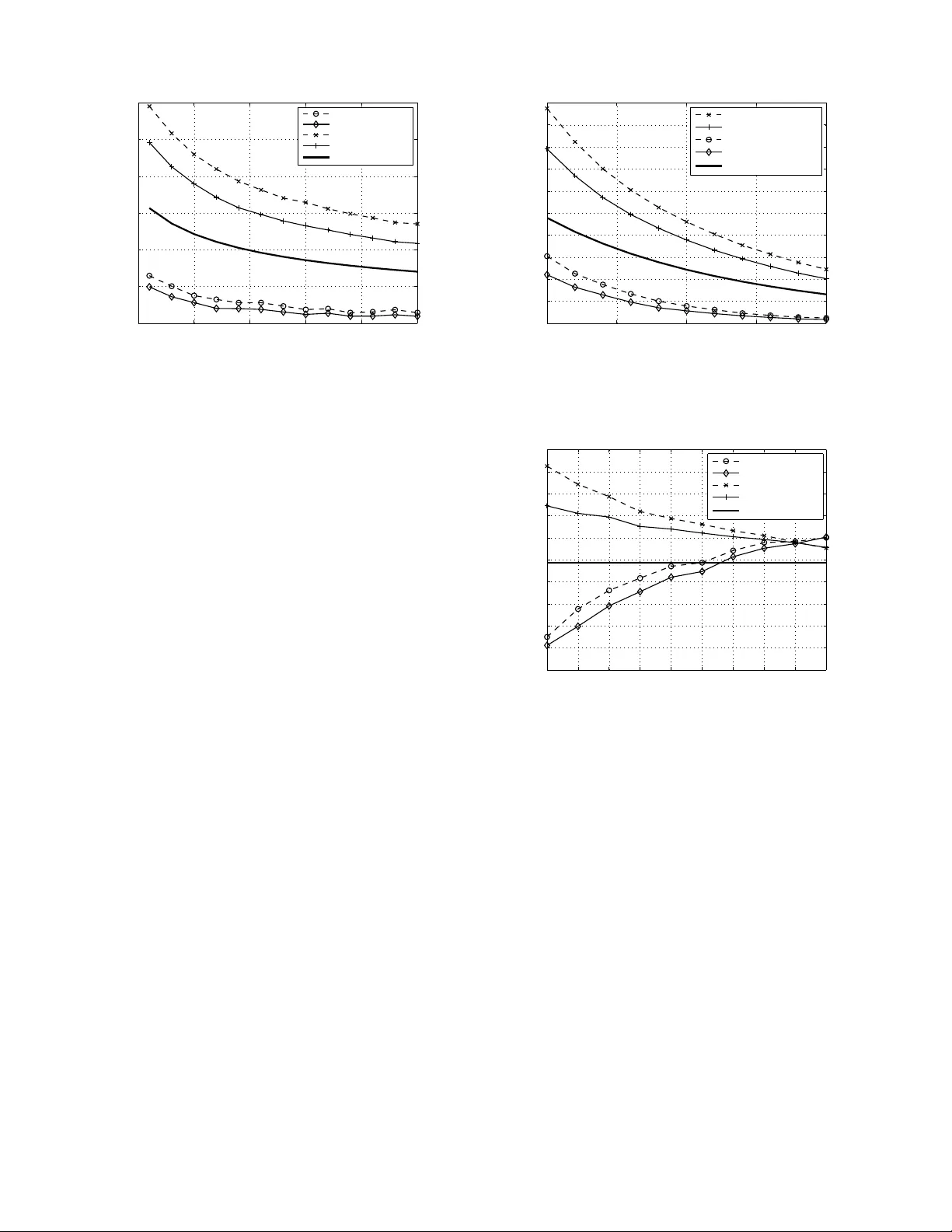
Authors: Farzan Haddadi, Mohammad Mahdi Nayebi, Mohammad Reza Aref
1 Directi on-of-Arri v al Estimation for T emporally Correlate d Narro wband Signals Farzan Haddadi, Mohammad M. Nayebi, and Mohammad R. Aref Abstract — signal di rection-of-arri val estimation using an array of sensors has been the sub ject of intensive r esear ch and deve lopment during the last two decades. Efforts hav e been directed to both, better solutions for the general data model and to dev elop mor e realistic mo dels. So far , many authors ha ve assumed the data to b e iid samples of a multivar iate statistical model. Although this assumption reduces the complexity of the model, it may not be true in certain situations wh ere signals show t emporal correlation. Some results are available on the temporally corre lated signal model in the literature. The tempo- rally correlated stochastic Cramer - Rao bou nd (CRB) has been calculated and an instrumen tal var iable-based method called IV -SSF is i ntroduced. Also, it has b een shown that temporally correla ted CRB is lo wer bounded b y the deterministic CRB. In this paper , we show th at temporally corre lated CRB is also upp er bounded b y th e stochastic iid CRB. W e inv estigate the effect of temporal corr elation of the signals on the best achiev able perfo rmance. W e also show th at the IV -S SF method is n ot efficient and based on an analysis of th e CRB, propose a v ariation in the method which boosts its performance. Simulation results show the improv ed performance of the proposed method in terms of lo wer bias and err or v ariance. Index T erms — Cra mer -Rao bound, temporal correlation, DO A estimation, arra y signal p rocessing . I . I N T R O D U C T I O N D IRECTION-of- Arriv al estimation using an arra y o f sen- sors is wid ely inv estigated in the literatu re in the last decades. Many m ethods are d ev eloped for d iv erse condition s (see e. g. [1] –[5]) and their perf ormanc es are presented via simulation results or ana lytical calculatio ns (for pap ers on theoretical analysis of the performan ces of the methods see e.g. [6]–[9 ]). Data models play an important ro le in DO A estima- tion. They facilitate th eoretical d eriv ations of various solutions by their inh erent simplistic m athematical and statistical n ature. At the same time, overseeing many real- world effects may result in modelling er rors and therefore subop timal metho ds for the p roblem at hand. The n, there is a trade-off be tween simplicity of the mod els and their usefulne ss in pr actice. In the c ontext of ar ray sign al p rocessing, there has b een considerab le research to resolve many aspects o f the standard model during the last decad es. As a parallel line of resear ch, there also ha ve been efforts to introduce better m odels which This work was supported in part by the Advanc ed Communicatio n Researc h Institute (ACRI ), Sharif Univ ersity of T echnology , and in part by the Iranian T ele communicat ion Re search Center (ITRC) under contra ct number T/500/206 13. Authors are wi th the Department of Electric al Engi- neering , Sharif Univ ersity of T echnolo gy , T ehran, Iran (e-mail s: farzanha d- dadi@ee .sharif.edu, Nayebi@sha rif.edu, and Aref@sharif.edu). Copyri ght (c) 2008 IEEE. Personal use of this m ateria l is permitte d. Ho we ver , permission to use this material for any other purposes m ust be obtaine d from the IEEE by sendin g a request t o pu bs-permissions@ie ee.or g. are mor e application- specific or sometimes mo re gen eral than the standard model. In the stand ard DO A estimation model, snapsh ots are as- sumed to b e iid or uncorr elated in tim e. In p ractice, iid assumption is satisfied with narrowband bandpass filtering of the received signal which gives zero time co rrelation in cer tain time d elays as ideal samplin g p oints. Howev er , assuming iid snapshots, places a lim itation on the app licability of the results in the real w orld and also forces some practical dif ficulties. Assuming perfect bandpass filtering of the signal and e xact sampling on the zeros of the correlation function, sampling rate should be reduced so that the subsequen t samples be uncorr elated. This is a technica l difficulty for environments with slo wly flu ctuating signals wh en we n eed lar ge number o f samples. Some max imum likelihood methods require the num - ber of observations be at least equ al to the number of sensors in ord er to have a full rank sample covariance matrix ˆ R [ 10], at the same time many available DOA estimation methods are efficient only asymptotically in numb er of snapshots [6]. Then, assuming iid snap shots in th eory , results in longer observation times which is not always possible due to m oving targets, and may expose us to unpred icted err ors due to modelling error . Therefo re, it seems u seful to accom modate time correlation of at least signals in the mo del. Recently , there have been some attempts to tack le with this problem . I n [11], authors con sider the perform ance o f the spatial cov ariance-based methods for DO A estimation when signal and n oise are n ot gu aranteed to be iid. They conclud e that only if noise is still unco rrelated in time, most method s are insensiti ve to the time c orrelation of the signals. I n [ 12], an instrum ental variable approach (I V -SSF) to the d irection- of-arrival estimation prob lem in the presence of the time correlation of the signals is pro posed. T he autho rs improve their previously pr esented method in [13] to o btain a mo re reliable app roach. The f eature of the IV - SSF is tha t it does not req uire any kno wledge of th e n oise covariance matrix but its unco rrelatedness in tim e. In [1 2], authors also p resent a statistical pe rforma nce e valuation for the IV -SSF and calculate some per forman ce b ound s for it. In particular , they deriv e the CRB for the general case of temporally correlated signals and show that it is lower bo unded by the well- known deterministic CRB [14]. In an other p aper in this field [15] , au thors show the asymp totic equivalence of spatial and temp oral IV -SSF methods in a unified fr amew ork. In this pap er , we study the prop erties of the temp orally correlated CRB. Althoug h the effect o f tempor al correlatio n of the signals o n th e co n ventional method s of DO A estimation is in vestigated in [11], an imp ortant remaining question is 2 the role of temp oral correlation of the signals in the best achiev able perfor mance. Is it helpful or harmfu l and how much in various conditions? W e in vestigate this issue and show that it is helpfu l particularly in low SNR s. W e also show that the temporally correlate d CRB cor is decre asing with the n umber of samples, as we expect. Th en we turn to the IV -SSF to show that it is not an efficient method of DO A estimatio n in the sense that it canno t achieve the CRB cor . Using an asympto tical analysis o f the CRB cor , we propose an improved version of the IV -SSF whic h can o utperf orm the existing version . At th e en d, simulation results con firm the superiority of the new version in terms of lower finite sample bias and estimation error v ariance. The remaining o f the paper is organized as follows: Section II presen ts the data m odel for th e tempor ally correlated signals array p rocessing. Section III is d edicated to the analysis of the CRB pro perties and a number of new results an d c omparison s. In section IV the optimality of the IV -SSF in compar ison with the CRB cor is investigated and an impr ovement is prop osed. In section V, simulation results are p resented to show the better perf orman ce of the pro posed m ethod. Finally , section VI conclude s the paper . Notation: ⊗ Kronecker product; ⊙ Hadamard -Schur pro duct; k · k matrix Frobeniou s no rm; ( · ) ∗ conjuga te; ( · ) T transpose; ( · ) H conjuga te tran spose; T r ( · ) trace; vec ( · ) vectorizing o perator ; ℜ real part; δ ij Kronecker delta; a ( θ i ) array steering vector; A = [ a ( θ 1 ) , . . . , a ( θ m )] ; steering matrix; D = [ d 1 , . . . , d m ] ; d i = d a ( θ i ) /dθ i ; Π ⊥ A I − A ( A H A ) − 1 A H ; orthogo nal projection on to the null space of A ; A ≥ B A − B is positive semi-defin ite; P ij ij ’th block of matr ix P ; P ij ij ’th element o f matrix P ; BT r m ( P ) = P i P ii m × m ; block trace; Block ij [ P ij ] a block matrix with blocks P ij . I I . D AT A M O D E L Let an array o f L sensors r eceive n sam ples of the ambient signal and noise. Signal is composed of p lane wa ves from m distant p oint sou rces with directions θ = [ θ 1 , ..., θ m ] . Spatial correlation between dif ferent sou rces and temporal co rrelation of the signals are pe rmitted. Noise is assumed to be temp orally white. Then, receiv ed d ata can be modelled as x ( t ) = A ( θ ) s ( t ) + ν ( t ) (1) where s ( t ) m × 1 is the sour ces signals and ν ( t ) L × 1 is the sensors no ise vector . D ata sam ples are gathered in m atrix form as X L × n = [ x ( t 1 ) , . . . , x ( t n )] , and the same is d one for the sign al sequ ences S m × n = [ s ( t 1 ) , . . . , s ( t n )] and n oise V L × n = [ ν ( t 1 ) , . . . , ν ( t n )] . Using this notation, the model in (1) can be wr itten as X = A ( θ ) S + V . (2) Now , we con sider the statistical pro perties of the mod el. Regarding the statistics of the signal, thre e models can be assumed: deterministic, iid , and tempo rally corr elated signal models. 1) Deterministic Sign al Mo del: Determin istic signa l model assumes a con stant sign al sequence in e very realization s o f the p rocess. Th en the statistical m odel o f r eceived data will be Gaussian with mean of the sig nal part and covariance m atrix due only to noise x det ( t ) ∼ N A ( θ ) s ( t ) , C (3) C = E ν ( t ) ν H ( t ) . (4) 2) iid S ignal Mod el: In the iid signal mo del, signal is a random p rocess with the sam e d istribution in every snapshots and no correlation exists b etween snap shots. T hen, d ata mo del for the iid case is x iid ( t ) ∼ N ( 0 , R ) (5 ) where R = AP A H + C (6) and P = E s ( t ) s H ( t ) . (7) 3) Corr elated Signa l Model: In the correlated s ignal model, noise samp les are still assumed to be spatially correlated , distributed as a zero-m ean Ga ussian rando m vector ν ( t ) ∼ N ( 0 , C ) , and temporally unco rrelated with E [ ν ( t i ) ν H ( t j )] = 0 , i 6 = j . Then, a space- time distribution for noise ca n be defined as vec ( V ) ∼ N ( 0 , C ) (8) C = I n ⊗ C . (9) Similarly , a s pace-time covariance can be de fined for s ignals. Let P ij , E [ s ( t i ) s H ( t j )] , then vec ( S cor ) ∼ N ( 0 , P ) (10) where P nm × nm = Block ij [ P ij m × m ] . Now , the space- time distribution of th e data under cor related sign al mode l can be easily shown to be vec ( X cor ) ∼ N ( 0 , R ) (11) where R = AP A H + C (12) and A = I n ⊗ A ( θ ) . (13) Note that (12) h as a structure similar to the iid case (6). It is also assumed th at m < L and that the array manifold has the property that every set of distinct steering vectors { a ( θ 1 ) , · · · , a ( θ L ) } forms a linearly in depend ent set. Also , a ( θ ) is a ssumed to b e a smo oth fun ction as it is in real applications which means that d ( θ ) exists. These assumptions pave the way for the estimation pro blem at hand to be identifiable. 3 I I I . A N A LY S I S O F T H E C R B In this section, we p resent new results and analyzes on the temp orally corre lated CRB to give mo re insight on th e estimation problem. W e are specially in terested in the role of temporal correlation of the signals in the dire ction estimation problem in comp arison with the un correlated signa l case or iid signals. CRB is a lower bound on the perform ance of any unbiased estimation method in terms o f erro r variance. Con sider a random vector distributed as y ( t ) ∼ f ( ψ ) , where ψ is the vector o f possibly unk nown p arameters of the distribution. Giv en samples o f y ( t ) , an u nbiased estimator ˆ ψ satisfies E [ ˆ ψ ] = ψ and its error variance is lo wer bound ed by the CRB as E ( ˆ ψ − ψ )( ˆ ψ − ψ ) H ≥ CRB ψ , ψ . (14) CRB is an in herent pro perty of the statistical mode l of th e data an d can be calculated directly from f ( ψ ) . Th e imp or- tance o f the CRB also com es fro m the fact that there exist estimators that at least asy mptotically attain the CR B such as the maximum likelihood estimator . In the f ollowing, CRB for thr ee d iscussed s ignal models are repeated for the sake of referenc e. In the deterministic signal model of (3) and (4) we have [14] CRB det θ , θ = 1 2 n h ℜ D H C − 1 2 Π ⊥ 0 C − 1 2 D ⊙ P T i − 1 (15) where Π ⊥ 0 = Π ⊥ C − 1 2 A . (16) In the iid model o f (5) and (6) the CRB iid is [14], [16] CRB iid θ , θ = 1 2 n h ℜ D H C − 1 2 Π ⊥ 0 C − 1 2 D ⊙ P A H R − 1 A P T i − 1 (17) and in the tempora lly correla ted sign al model of ( 11), (12), and (13) the CRB cor is [12, eq. 112] CRB cor θ , θ = 1 2 h ℜ D H C − 1 2 Π ⊥ 0 C − 1 2 D ⊙ BTr m ( P G H R ′ − 1 G P ) T i − 1 . (18) where G = C − 1 2 A (19) R ′ = G P G H + I = C − 1 2 R C − 1 2 . ( 20) where I = I n ⊗ I L . It is note worthy that the expression of the CRB cor in [1 2] is slightly different fro m (18) in that it contains a factor of 1 n in the righ t-hand- side. This is a direct consequen ce of the difference in the definition of the CRB between (14) and what is in [12]. As a co nfirmation for the form of CRB cor in (18), consider the case o f iid signals where the space-time matrices turn out to be block-diago nal. then a factor of 1 n appears in the righ t-hand -side to red uce the CRB cor in (18) to the CRB iid in (17). T o proce ed furth er , we fir st g iv e a simp lified fo rm of the CRB cor in (18). Note that G H R ′ − 1 G = A H R − 1 A (21) then the CR B cor can be written as CRB cor θ , θ = 1 2 h ℜ D H C − 1 2 Π ⊥ 0 C − 1 2 D ⊙ BTr m ( P A H R − 1 A P ) T i − 1 . (22 ) Now , we ar e ready to state our fir st result on the comparison of the CRB in the sign al models introduced. Theor em 1: For the determin istic signal m odel in (3) and (4), iid sig nal model in (5) and (6), and the tempo rally correlated signal m odel in (11) and (12), CRB cor is upper bound ed by CRB iid and lo wer bounded b y CRB det CRB det ≤ CRB cor ≤ CRB iid . (23) Pr o of: The left side inequality is proved in [12], therefore we gi ve a p roof for the right side inequality . W e make use of a form o f the W oodburry identity [1 7], [18] wh ich s tates that ( A + B C D ) − 1 = A − 1 − A − 1 B ( I + C D A − 1 B ) − 1 C D A − 1 (24) which is essentially a nother fo rm of the matrix in version lemma. Now we expand th e space- time m atrix in the b lock trace of (22) substituting fr om (12) and making use of (24) to have P A H R − 1 A P = P A H C − 1 − C − 1 A ( I + P A H C − 1 A ) − 1 P A H C − 1 AP = P A H C − 1 AP − P A H C − 1 A ( I + P A H C − 1 A ) − 1 P A H C − 1 AP . (25) W e factor the common terms of (25) from rig ht side to ge t I − P A H C − 1 A ( I + P A H C − 1 A ) − 1 P A H C − 1 AP . (26) Add and sub tract an I to the P A H C − 1 A in the bracket in (26) to get ( I + P A H C − 1 A ) − 1 P A H C − 1 AP . (27) Do th e same for the ter m o utside the bracket in (27) in the following fo rm ( I + P A H C − 1 A ) − 1 ( I + P A H C − 1 A − I ) P . (28) As a useful result, we arriv e to the fo llowing equality simp li- fying (28) P A H R − 1 A P = P − ( P − 1 + A H C − 1 A ) − 1 . (29) Note th at the m atrix in paren thesis is positive semi-definite, then we will ha ve P A H R − 1 A P ≤ P (30) which is an other pro of for the left side inequ ality in (23) ( see [12]). Now , we proceed to prove the right side inequality in (23). define P d , Block ij [ P ij δ ij ] (31) which is the block -diagon alized version of the signal space- time covariance matrix. No te th at blo ck-diago nal space -time covariance matrix for signals P d , represents the tempora lly 4 uncorr elated signal m odel (more gener al than iid signal model), while P rep resents th e tempora lly corre lated sign al model. Now , assume a matrix F and its b lock-dia gonalized version F d . It is well kno wn th at ( F − 1 ) ii ≥ ( F ii ) − 1 = ( F ii d ) − 1 = ( F − 1 d ) ii . (32) Using the inequ ality in (32), besides the fact that A H C − 1 A is block-diago nal, we will hav e A H C − 1 A − P + ( A H C − 1 A ) − 1 − 1 ≤ A H C − 1 A − P d + ( A H C − 1 A ) − 1 − 1 (33) Now , we multiply B , ( A H C − 1 A ) − 1 from righ t and left o f both sides of the ine quality to get B − B P + B − 1 B ≤ B − B P d + B − 1 B . (34) The abov e expression s can be simplified usin g matrix inversion lemma to gi ve P − 1 + A H C − 1 A − 1 ≤ P − 1 d + A H C − 1 A − 1 . (35) Applying the block trace operator and adding a common term results in BT r m P − P − 1 + A H C − 1 A − 1 ≥ BT r m P d − P − 1 d + A H C − 1 A − 1 . (36) According to (29), the inequality in (3 6) implies tha t BT r m P A H R − 1 A P ≥ BT r m P d A H R − 1 d A P d . (37) which in fact co mpletes the proof o f (23) sho wing that CRB cor ( P ) ≤ CRB cor ( P d ) . (38) The upper b ound and lo wer b ound on the CRB cor presented in (23) is very insightf ul to the estimation pr oblem at han d. It implies that the existence of a tempora l correlation in the signals improve the best attainable performance o f estimation. The comparison made in th eorem 1 is conditioned on th e specific spatial covariance matrix of the sources in each sample i.e. with the same diagon al b locks of the space-tim e signal covariance matrix. It shows that ad ding a nondiago nal covariance b lock improves the performan ce sin ce it simplifies the extraction of the signal part from received data. M ost spatial covariance-ba sed DOA estimation methods r ely on the different spatial characteristics of the sign al and noise (signals a re poin t sources o f radiation wh ile no ise is un iformly distributed in the sp ace o r at least is spread via large are as). This is not the case in the tem porally cor related sign al m odel where the re is a pa rticular difference betwe en signal and no ise in tha t on e is temporally cor related and th e o ther is temporally uncorr elated. This increased distance of the signal mo del and noise mod el improves the CRB and th e perfo rmance of the methods using it. As a r esult, we can see that th e CRB cor is lower than the CRB iid which implies better perf ormanc e when n oise and signal have dif ferent tempo ral char acteristics. Another explana tion for th e in equalities pr esented in (23) comes f rom the degree o f p redictability o f the signal. It is obvious that in the dete rministic signal model we ha ve a sta- tistically constant signal which is fully predictable. Therefore, the p erfor mance is best in the deterministic sign al model. In the correlate d signal mo del, sign als are stochastic in na ture and vary in each realization, which m akes the sign als less predictable . Though, the e xistence of the temporal corre lation of the signals of fers a limited possibility for coar se signa l prediction and extraction f rom noise which places the CRB cor lower than the completely uncorrelated case of CRB iid . Although we h ave confined the CRB cor between CRB det and CRB iid in the orem 1 , we are interested to more exactly spec ify the beh avior of the CRB cor in different situations. This helps us to get mo re insight to the role of tempor al correlation of the signals in DOA estimation. Th erefor e we con sider approx imations of the CRB cor in different situations in temr s of signal to noise ratio ( SNR) in the follo wing theo rem. Theor em 2: In the high SNR cond ition, temp oral cor rela- tion of the signals makes n o improvement on the unco rrelated signal model while in the lo w SNR condition, th e co ntribution of zero-la g and nonzero-lag covariances are the same, i.e . nonzer o-lag covariances imp rove the CRB. SNR ≫ 1 : CRB cor ≃ CRB iid (39) SNR ≪ 1 : CRB cor < CRB iid (40) Pr o of: Consider the high SNR co ndition. W e make use of th e following easily chec ked approxim ation for any approp riately sized matrices B and ∆ if k ∆ k ≤ k B k ( B + ∆ ) − 1 ≃ B − 1 − B − 1 ∆ B − 1 + B − 1 ∆ B − 1 ∆ B − 1 − · · · (41) Now we can expand the b lock trace in CR B cor as follows BT r m P A H R − 1 A P = BT r m P A H ( C + AP A H ) − 1 A P . (42) W e u se matrix inversion lem ma for the in verse in the block trace of (42) to ge t BT r m P A H C − 1 − C − 1 A ( P − 1 + A H C − 1 A ) − 1 A H C − 1 A P . (43) Now we use the approx imation in (41) up to the third term. Note that the high SNR assumption guarantees that k P − 1 k ≤ k A H C − 1 A k . After some calculations we g et BT r m P A H R − 1 A P ≃ BT r m P − ( A H C − 1 A ) − 1 (44) in the high SNR region and to the seco nd ord er of ap- proxim ation. Th e appro ximation in (4 4) asserts th at in high SNR con dition, only b lock trace o f the sign al space-time covariance m atrix contribute to the Cramer-Rao bound, hence we can con clude that in this case, the tempo ral corr elation of the signals (repr esented by n ondiag onal blocks of P ), do not imp rove the best ach iev able performance of the DOA estimation and (39) follo ws. 5 In the very low SNR region, we use the app roximatio n R ≃ C . Th en e xpand ing the block trace in the CRB gi ves BT r m P A H R − 1 A P ≃ X i,r ( A P r i ) H C − 1 ( A P r i ) . (45) W e can see fro m (45) that every block s of P contribute the same to the CRB cor in the situation of very low SNR. Since each term in the summ ation of (45) is positive semi- definite, the n e ach nondiag onal b lock o f P im proves the CRB cor making the distance from CR B iid larger wh ich im plies (40). It is notew orthy th at improvement of the CRB does not mean the perform ance improvement of the conv entional DO A estimation meth ods, rath er it clarifies the existence o f m ethods that can achieve better perfo rmances through m aking use of the temporal characteristics of the signals and noise. Now , after we considere d the role of the tem poral correla- tion of the signals in the best ach iev able per forman ce o f DOA estimation, we turn to an assumed characteristic of the CRB. The CRB usually d ecreases with increased amo unt of d ata. This is o bvious in the iid signal models where the CR B f or n data samples is 1 n of the CRB for one sample. Thoug h, this is n ot very clear for th e temp orally corre lated sign al mo del where the depen dence of the CRB cor on n is emb edded in the size of the space-time matrices. Theor em 3: CRB cor is decreasing with increasing n . CRB cor ( n + 1) < CRB cor ( n ) . (46) Pr o of: Applying matrix inversion lemma, we can sho w that A H R − 1 A = P + ( A H C − 1 A ) − 1 − 1 . (47) Assuming P n +1 as th e block -diagon ally aug mented version of P n and using (47), we will have CRB cor P n P n +1 ≤ CRB cor ( P n ) . (48) since BT r m [ P n +1 A H n +1 R − 1 n +1 A n +1 P n +1 = BT r m P n ( P n + ( A H n C − 1 n A n ) − 1 ) − 1 P n + P n +1 P n +1 + ( A H C − 1 A ) − 1 − 1 P n +1 (49) and the seco nd term is positiv e semi- definite. Following the same steps as in (33) to (38 ), we can also show the following inequality which completes the p roof. CRB cor P n Q H Q P n +1 ≤ CRB cor P n P n +1 (50) Note that, (50) is a generalization of the R.H.S. inequality in (23). In this section , we investigated the ge neral p roper ties o f the directio n-of- arriv al estimation pr oblem in th e presence of the temp orally correlated sign als. W e perfor med this via Cramer-Rao bo und an alysis an d characterization. In the next section we tu rn to the practical methods to ac complish DO A estimation under temporally correlated signal mo del. I V . S U B O P T I M A L I T Y O F T H E I V - S S F M E T H O D W e ha ve considered th e best achie vable performance in the temporally correlated sign al model. In particular, we found that it is possible to improve the perfo rmance of the co n ventional spatial covariance-based method s by de vising new metho ds that can e xploit the temp oral correlation of the signals. Ho w- ev er , th e CRB cor has been calculated under the assumption of k nown n oise spatial covariance matrix. When this is no t true, we do not expe ct any m ethod to re ach the CRB cor in perform ance. In th e situatio n of unk nown noise spatial covariance matrix, the instrume ntal variable subsp ace fitting (IV -SSF) metho d for direction-o f-arrival estimation h as been propo sed in [ 12]. The me thod is based o n the instrumental variable approach . It makes an instrumental variables vector φ ( t ) for each data sample x ( t ) in such a way that the cross- covariance of φ ( t ) and x ( t ) does not contain the unk nown noise covariance matrix. Then , a sample cross-covariance can be used to extract the signa l subspace and parame ters o f interest. Note that the sign al temp oral cor relation leave a ro om for the mu ltiplication of no ncontem porary data to contain informa tion about the direction s of arrival. The instru mental variables vector for each data sam ple x ( t ) is formed as φ ( t ) , x ( t − 1) . . . x ( t − M ) (51) where M is a user defin ed integer deter mining the degree of com plexity an d hen ce the perfor mance o f the method . In general, larger M shou ld result in better estimates, althou gh simulation results show in creased bias an d decreased er ror variance when M b ecomes larger . Let the cross-covariance of the signals at time lag k be defined as P k , E [ s ( t − k ) s H ( t )] (52) and define for con venience J = P 1 . . . P M (53) then the cro ss-covariance o f th e receiv ed data and th e corre- sponding instrumental v ariable will be Σ , E [ φ ( t ) x H ( t )] = ( I M ⊗ A ) J A H (54) which is independ ent o f the unknown no ise spatial cov ariance matrix C . Also d efine the instrum ental variable covariance matrix as Φ , E [ φ ( t ) φ H ( t )] . (55) The estimates o f the DOAs in IV -SSF method are obtained in the f ollowing steps: choose M > 1 and compu te the sample estimates ˆ Σ = 1 n − M n X t = M +1 φ ( t ) x H ( t ) (56) ˆ Φ = 1 n − M n X t = M +1 φ ( t ) φ H ( t ) . (5 7) 6 Next, extract ˆ R 0 from ˆ Φ , as one o f the m × m diag onal blocks. The estimates of the par ameters are the minimizer of the following criterion fun ction: ˆ θ = a rg min θ T r ˆ Π ⊥ 0 ˆ R − 1 2 0 ˆ V s ˆ Φ 2 s ˆ V H s ˆ R − 1 2 0 (58) where ˆ Π ⊥ 0 = I − ˆ R − 1 2 0 A A H ˆ R − 1 0 A − 1 A H ˆ R − 1 2 0 (59) and ˆ V s contains the dominant right singular v ectors of the ma- trix ˆ Φ − 1 2 ˆ Σ , while the associated singu lar values are gathered in matrix ˆ Φ s . Using the IV -SSF method, the asympto tic error cov ariance matrix has been sho wn to be [1 2] Cov IV -SSF = 1 2 n h ℜ D H C − 1 2 Π ⊥ 0 C − 1 2 D ⊙ J H A H M Φ − 1 A M J T i − 1 (60) in which A M = I M ⊗ A . The covariance in (60) is sligh tly different from the CRB cor in (22). W e aim to show that th e IV -SSF method w ith above erro r covariance do es no t attain the CRB cor asymptotically and relying o n this analysis, we propo se a variation in the meth od to boo st its perfo rmance. T o this end , we u se an asym ptotic analysis presented in [1 2] with som e modificatio ns to be a ble to co mpare the CRB cor and the cov ariance in (60). Define an estimation pro blem in which we are interested to estimate the signal s ( t ) using the da ta z ( t ) = s ( t ) + w ( t ) , in which w ( t ) is a temporally wh ite n oise term with spatial covariance matrix ( A H C − 1 A ) − 1 . No te tha t w ( t ) is temp orally wh ite since it is constru cted fr om iid noise term ν ( t ) by a lin ear tran sform in the space domain. Assume that we are to estimate s ( t ) from M previous samples of z ( t ) z M ( t ) = z T ( t − 1) · · · z T ( t − M ) T . (61) with the best line ar tr ansform which minimizes the err or covariance matrix. The estimation error will be s ( t ) − H z M ( t ) = e ( t ) (62) where H is th e best linear tran sform in the least squ ares sense. Making use of the orthogonality pr inciple, we can show that ˆ H = J H P M + ( A H M C − 1 M A M ) − 1 − 1 (63) where P M is the space-tim e covariance matrix of the signals in M snap shots and C M = I M ⊗ C . The resulting minimized error cov ariance matrix will be Σ e = P 0 − J H P M + ( A H M C − 1 M A M ) − 1 − 1 J (64) which along with a readily shown result similar to (47) reduces the second part of the error covariance matrix of IV - SSF method in (60) to J H A H M Φ − 1 A M J = J H P M + ( A H M C − 1 M A M ) − 1 − 1 J = P 0 − Σ e . (65) The error covariance matrix in (6 5) has the implication that the minimum attainable error covariance in th e IV -SSF method depend s on the min imum error of pre diction of the pro cess s ( t ) in the noise term w ( t ) using M previous samp les of the da ta z ( t ) . Lowering the prediction error will ca use the error covariance of IV -SSF in (60) to redu ce. Now we use an asymptotic a nalysis o n the CRB cor to r eform it in a fo rm similar to ( 65) which enab les us to und erstand wh y IV -SSF method does n ot r each the CRB cor and propose a mo dification in the method to improve its perfor mance. Assume that large number of data is a v ailable n → + ∞ . The block trace in the CRB cor in (22) can be written as BT r m [ P A H R − 1 A P ] = n X i =1 P i · A H R − 1 A P · i (66) where P i · and P · i denote the i ’th b lock row and column of P , respectively . W e a ssume a stationary signal mod el in this sectio n wh ich re sults in a block T oeplitz signal space- time cov ariance P . Further, we assume a regular signal random process in which the cross-covariance decreases with increasing time lag. For such asymptotic conditions we can see that block rows P i · are shifted versions of each other, ign oring the fir st and last ones. T he s ame is tru e fo r b lock co lumns P · i and also fo r the matrix R − 1 and hence A H R − 1 A , i.e. blo ck rows (and c olumns) of these matrices are shifted version s of each other . This special m atrix multiplication for m ensures that the terms in summation in (66) are ap proxim ately equ al. Then, (66) can be re duced to BT r m [ P A H R − 1 A P ] ≃ n P ′ T A H R − 1 A P ′ (67) where P ′ = [ · · · P T − 1 P T 0 P T +1 · · · ] T . (68) Now , using a similar analysis as in (61) to (65) with a da ta vector d efined as z cr b ( t ) = · · · z T ( t − 1) z T ( t ) z T ( t + 1) · · · T (69) results in an appro ximation similar to (65) for the second part of the CRB cor P ′ A H R − 1 A P ′ = P 0 − Σ ǫ (70) in which , Σ ǫ is the er ror covariance o f the smoothing of the rand om process z ( t ) , i.e. estimatin g th e signal part s ( t ) from the data d escribed in (69). Now , after that we have transform ed the matrix forms of the CRB cor and the er ror of the IV - SSF metho d to the same form ats, it is po ssible to see that the IV -SSF meth od won’t attain the CRB cor since Σ ǫ < Σ e . Obviou sly , it is easier and re sults in lower err or to estimate the signa l s ( t ) u sing z cr b ( t ) in (69) rather than using z M ( t ) in (61) becau se of larger amou nt o f co rrelated data av ailable. Using this a nalysis, we can u nderstand what is required to impr ove the perfo rmance of the IV -SSF method. The key observation is th at th e stru cture of the estimation problem and z M ( t ) is s imilar to the s tructure of th e φ ( t ) , the instrumental variable cho sen for the IV - SSF . It shows that we could achieve th e best pe rforma nce if we could hav e defined an in strumental variable co ntaining all data befo re and after the present signal s ( t ) . Though, we can’t includ e x ( t ) in th e instrumental variables since it requir es the kn owledge of the 7 0 10 20 30 40 50 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5 n : number of snapshots log(CRB) CRB iid CRB cor CRB det Fig. 1. An example of th e CRB ve rsus the number of snapshots in logarit hmic scale for two sources. The t emporally correlated CRB is uppe r bounded by the iid CRB and lo wer bounded by the deterministic CRB. noise covariance m atrix. Also, the limited d egree of complex- ity we afford for ou r method don’t p ermit the inclusion of too many instru mental variables. W e are fr ee to choose M instrumental v ariables and we propose the fo llowing φ pro ( t ) , x ( t + M 2 ) . . . x ( t + 1) x ( t − 1) . . . x ( t − M 2 ) (71) In the subsequent section, we will presen t simulation results which confirm the improvement in the perfor mance o f the IV - SSF m ethod using the above two-sided instrumental variables. V . S I M U L A T I O N R E S U LT S In this section, we illustrate th e CRB cor and the per forman ce of the two method s inv estigated: the I V -SSF metho d and our propo sed meth od which we call two-sided IV -SSF . W e also pr esent simulation results th at confirm the ineq uality in theorem 1. Perfo rmance of the metho ds is consider ed in the sense of er ror variance and b ias. Although the IV -SSF method shows to be asymptotically ( n → + ∞ ) u nbiased and this is shown theo retically in [12] , in the non asymptotic r egion o f limited a v ailable data, it shows stron g bias. W e will see that the two-sided IV -SSF outperform s IV -SSF in b oth lo wer bias and lower erro r variance. W e first present some graph s on the Cram er-Rao bou nds. The main result we p rovided on the CRBs is th e ine quality in (23). W e also showed that the tempo rally cor related CRB is decreasing with the number of snapshots n . These facts are presented via an example of two-source scenario in Fig. 1. Conditions o f the simu lation are as fo llows: two sour ces at angles [0 0 . 2 ] radians with resp ect to the array broadside are present. Array number of elemen ts is 3 with λ/ 2 spacing and SNR=10 dB. Un iform linear array is assum ed and the signal −10 −5 0 5 10 −6 −5 −4 −3 −2 −1 0 1 SNR dB log(CRB) CRB iid CRB cor CRB det Fig. 2. An example of the CRB versus the SNR in logarit hmic scale for two sources. The temporally c orrelat ed CRB te nds t o t he iid CRB as SNR increa ses. −10 −5 0 5 10 15 20 0.4 0.5 0.6 0.7 0.8 0.9 1 SNR dB CRB normalized to the CRB iid CRB cor / CRB iid CRB det / CRB iid Fig. 3. T he comparison of the temporall y correlated CRB an d determini stic CRB normaliz ed to t he iid CRB. The compari son sho ws the equiv al ence of the iid and temporally corr elate d CRBs when SNR is high enough. covariance matrix is defined as P = P t ⊗ P s (72) where [ P t ] ij = e − 0 . 2 | i − j | , [ P s ] ij = e − 0 . 5 | i − j | , and C ij = σ 2 e −| i − j | . Fig. 1 sho ws the decreasing CRB versus in creasing n , it also co nfirms the inequality in (23) f or this special c ase. It is also noteworthy that th e difference between three types of CRBs increases with n since with increased n umber o f snapshots, there are mo re room fo r th e tempor al correlatio n to improve the DOA e stimation performa nce. In Fig. 2, CRBs are depicte d versus SNR. I t can be seen that a s SNR in creases, three ty pes of CRB m erge together and d ecrease lin early . Thoug h, the CRB cor joins the CRB iid faster than CRB det . This is better shown in Fig. 3, where the CRBs are n ormalized to the CRB iid to confirm th e result of theorem 2 which is stated in (39). Now , we present simulation results which support the pr o- posed method versus the main IV - SSF . In the simulation s, single so urce located in ω , 2 π d λ cos( θ ) = 0 . 8 is assumed, with a four-element half-wav elength array , number o f instru- 8 50 100 150 200 250 300 0 0.01 0.02 0.03 0.04 0.05 0.06 Number of Snapshots Bias IV−SSF 1 sided Bias IV−SSF 2 sided STD IV−SSF 1 sided STD IV−SSF 2 sided CRB cor Fig. 4. Bias and standard de viation of one- and two-side d IV -SSF methods versus n . It is clear that the two-si ded IV -SSF outpe rforms the one-sided one in both lo wer bias and lo wer standard de viat ion. The i mprov ement is rather constant with n . Asymptotical ly in lar ge n , bias is ne gli gible in th e overa ll mean square error . mental variables M = 2 , and number of trials 100 00. In Fig. 4, perf ormanc e measures, bias an d standar d deviation of the estimate of ω are pr esented versus the n umber of snap shots n , while SNR=0 dB is constan t. Signal temp oral correlatio n is simulated via filtering an iid rand om sequen ce with an FIR filter with relativ e tap weigh ts f ( z ) = 1 + 0 . 5 z − 1 + 0 . 3 z − 2 + 0 . 2 z − 3 + 0 . 1 z − 4 (73) which is then nor malized to give a unit-en ergy filter . The estimates are calculated using a two step grid searc h, first a coarse search w ith grid size 0 .01 and then a finer o ne with grid size 0.0 01. Fig. 4 shows the bias and standard deviation of both methods versus n . Altho ugh bias is relati vely sma ll, it cannot be neglected in small number s of snap shots. Althoug h the CRB cor in (22) h as been calcu lated assuming zero bias, it is still r ew arding to comp are the perfo rmance of the methods to the sq uare root of the CRB cor , which is depicted in Fig. 4. Here, we used f ( z ) in (73) to compute th e signal space-time covariance matr ix P . The impr ovement mad e by the tw o-sided IV -SSF is r ather constant with n specially in th e standard deviation. It is clear that the two-sided IV -SSF h ad made rough ly 20% imp rovement in the standard de viation and bias without increasing the computationa l load of the algorithm. In Fig. 5, the same compar ison is made with con stant n = 100 and varying SNR. Obvio usly , the imp rovement made by two-sided IV -SSF is gr eater in lower SNR. I n high SNR condition s, bias is rather negligible in both meth ods, wh ile the improvement percentage is n early constant with SNR. Finally in Fig. 6, the co mparison is mad e in constant n = 1 00 and SNR=0 dB, wh ile M is chan ged to see the effect of th e method comp lexity ind icator o r the number of in strumental variables on the bias and standard de viation of both me thods. The interesting point is that in low M , there is considerab le improvement from one-sided to two-sided IV -SSF . But this improvement decr eases as M increases since for large M , there is eno ugh previous samples to estimate the p resent signal of inter est with suf ficient accu racy comparab le to th e acc uracy −10 −5 0 5 10 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 SNR in dB STD IV−SSF 1 sided STD IV−SSF 2 sided Bias IV−SSF 1 sided Bias IV−SSF 2 sided CRB cor Fig. 5. Bias and standard de viation of one- and two-side d IV -SSF methods versus the S NR. The improv ement made by two-sid ed IV -SSF is large r in lo wer SNRs. In high SNRs, bias i s ne gligi ble in the ov eral l error . 2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05 M Bias IV−SSF 1 sided Bias IV−SSF 2 sided STD IV−SSF 1 sided STD IV−SSF 2 sided CRB cor Fig. 6. Bias and standard de viation of one- and two-side d IV -SSF methods versus the number of instrument al varia bles M . The improveme nt m ade by two sided IV -SSF i n sta ndard de viation is larger in lo w M. Also, bias gro ws with M and finally get s la rger than stan dard de viat ion for large M. that can be achiev ed u sing the two-sided estimation. Another importan t point of the Fig. 6 is the increasing relativ e p art of the bias in the o verall mean square err or of the e stimation with increasing M . This phenomena can lead us to limit the number of instrum ental variables so as to avoid large un predictab le bias. This selection can b e more ration al when we consider the increased co st of implementation whe n M g ets larger . It is a lso evident in Fig. 6 that the CRB cor is in depen dent of M and gr adually , with increasing M , the po rtion of error caused by stand ard deviation d ecreases while the error ca used by bias increases. V I . C O N C L U S I O N In th is paper, we pr esented new theo retical results on the perfor mance of the DOA estimation when signals of intere st are possibly tempo rally correlated. In particular, it was shown that the Cram er-Rao bo und in th e tem porally correlated sign al model is upper b ounde d by the same bound un der the iid signal model. Th is result implies that temp oral correlation 9 of the signals is an additiona l relevant inf ormation for DO A estimation. W e sho wed th at th e improvement caused b y sign al temporal cor relation is large when SNR is low and little when SNR is hig h. This is a g ood news since th e high SNR condition is not critical in our system s where we can use many subop timal m ethods; while the low SNR perf ormanc e improvement is valuable to the system. The second pa rt o f the paper was de voted to a practical method o f DO A estimatio n in the new signal mod el. Th e IV -SSF metho d was analy zed and comp ared with the CRB cor to show that it is n ot an efficient method . Then, using a special for m o f th e CRB cor , we p roposed a version of the IV -SSF method (two-sided IV - SSF), that outp erform th e form er m ethod in both lower b ias and lower erro r variance. R E F E R E N C E S [1] H. Krim and M. V ibe rg, “T wo decades of array signal processing research : the parametric approach, ” IEEE Signal Pr ocess. Mag. , vol . 13, pp. 67-94, July 199 6. [2] B. D. V an V een and K. M. Buckley , “Bea mforming: a versati le approach to spatial filteri ng, ” IEEE ASSP Mag . , pp. 4-24, Apr . 1988. [3] R. O. Sch midt, “ Multipl e emmiter loca tion and signal parameter e sti- mation, ” IEEE T rans. Ant. Pr opag . , vol. AP-34, pp. 276-280 , March 1986. [4] M. Vi berg and B. Ottersten, “Sensor array processing based on subspace fitting, ” IEEE T ran s. Signal Proc ess. , vol. 39, pp. 1110-1121, May 1991. [5] Y . Bresler and A. Macovski, “Exact maximum likeli hood parameter estimati on of sup erimposed expo nentia l signal s in noise, ” IEEE T rans. Acoust. Speech , Signal Pr ocess. , vol. ASSP-34, pp. 1081-108 9, Oct. 1986. [6] P . Stoi ca an d A. Nehorai, “ MUSIC, maxi mum likelihoo d, and Cramer - Rao bou nd, ” IEEE T rans. Acoust. Speec h, Signal Proce ss. , vol . 37, pp. 720-741, May 1989. [7] X. L. Xu and K. M. Buckley , “Bias analysis of the MUSIC l ocatio n estimato r , ” IEE E T rans. Signal Pr ocess. , vol. 40, pp. 25 59-2569, Oct . 1992. [8] P . T icha vsky , “High-SNR asy mptotics for signal subspace methods in sinusoidal frequenc y e stimation , ” IEE E T rans. Signal Pr ocess. , v ol.41, pp. 2448-2460, July 1993. [9] H. Abeida and J. P . Delmas, “Gaussian Cramer-R ao bound for directio n estimati on of noncircula r sign als in unkno wn noise fields, ” IE EE T rans. Signal P r ocess. , vol. 53, pp . 4610-4 618, Dec . 2005 . [10] A. G. Jaffer , “Maximum lik elih ood direction finding of stocha stic sources: a separabl e solut ion, ” i n Pro ceedin gs Int ernationa l Conf er ence Acoustic Speech S ignal Pr ocessing , pp. 2893-2896, 19 88. [11] J. P . Del mas and Y . Meurisse, “ Asymptotic performance ana lysis of DO A finding algo rithms with temporall y correlated narro wband signals, ” IEEE T rans. Sig nal Pr oce ss. , v ol. 48, pp. 2669-2674, Sept. 2000. [12] M. V ibe rg, P . Sto ica, and B. Ottersten, “ Array proc essing in c orrelat ed noise fields based on instrumenta l variabl es and subspace fitting, ” IE EE T rans. Sig nal Pr oce ss. , v ol. 43, pp. 1187-1199, May 1995. [13] P . Stoica, M. V iberg, and B. Ott ersten, “Instrumental v ari able app roach to array processing in spatiall y correlated noise fields, ” IEE E T rans. Signal P r ocess. , vol. 42, pp . 121-13 3, Jan. 1994. [14] P . Stoica and A. Nehorai, “Performance study of condition al and uncon- ditiona l directi on-of-arri val estimation, ” IEEE T rans. Acoust., Speech, Signal P r ocess. , vol. 38, pp . 1783-1 795, Oct . 1990 . [15] P . Stoica , M. V iber g, M. W ong, and Q. W u, “Optimal IV -SSF approach to array signal processing in colored noise fiel ds, ” in Proc eedings of IEEE Internationa l Confe re nce on A coustics, speech and signal pr ocessin g , pp. 2088-2091, 19 95. [16] P . Stoica, E. G. Larsson, and A. B. Gershman, “The stochasti c CRB for arra y proce ssing: a textbook deri v ati on, ” IEEE Signal Pr ocess. Lett. , vol. 8, pp. 148-150, May 2001. [17] G. Bien venu and L. Kopp, “Optimali ty of high resoluti on array pro- cessing using the ei gensystem approach, ” IEEE T ran s. Acoust. Sp eec h Signal P r ocess. , vol. ASSP-31, pp. 1235-1248, Oct. 1983. [18] A. S. Householde r , The theory of matrices in n umerical analysis , Dover Publica tions, Ne wyork, 1975.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment