Doppler Spread Estimation by Tracking the Delay-Subspace for OFDM Systems in Doubly Selective Fading Channels
A novel maximum Doppler spread estimation algorithm for OFDM systems with comb-type pilot pattern is presented in this paper. By tracking the drifting delay subspace of time-varying multipath channels, a Doppler dependent parameter can be accurately …
Authors: Xiaochuan Zhao (1), Tao Peng (1), Ming Yang (1)
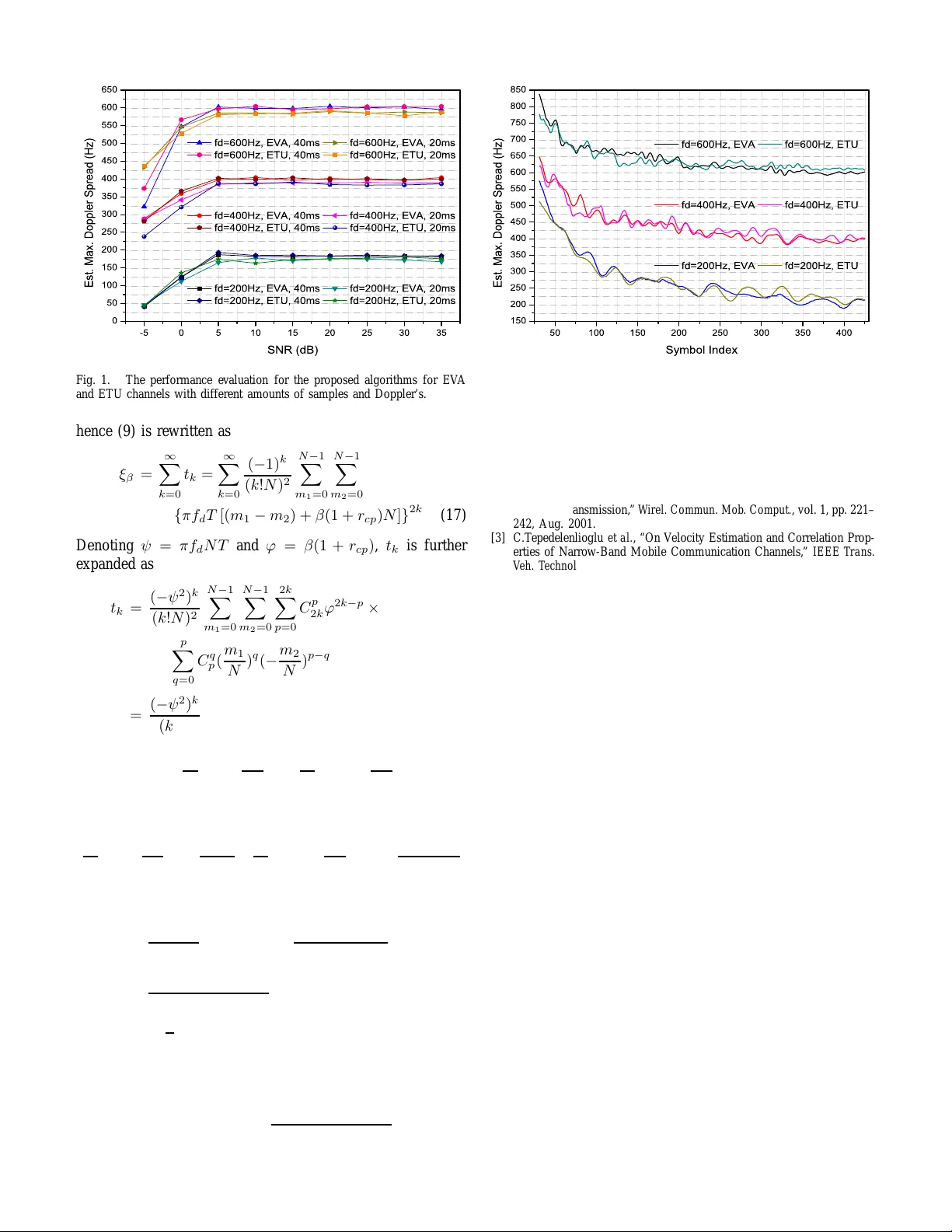
1 Doppler Spread Estimation by T racking the Delay-Subspace for OFDM Systems in Doubly Selecti ve Fading Channels Xiaochuan Zhao, Stude nt Member , I EEE, T ao P eng, Member , IEEE, Mi ng Y ang an d W enbo W an g, Member , IEEE Abstract —In this paper , a nov el maximum Doppler sprea d estimation algorithm is pre sented fo r OFDM systems with the comb-type pilot pattern in doubly selective fading chann els. First, the least-squared estimated channel frequency responses on p ilot tones are used to generate two auto-correlation matrices wi th different lags. Then, accor ding to these two matrices, a Dopp ler dependent parameter is measured. Based on a time-v arying multipath ch annel model, the p arameter is ex panded and then transfo rmed into a n on-linear high-order polynomial equation, from which the maximum Doppler spread is readily solved by using the Newton’ s method. T he d elay-subspace is utilized to reduce th e noise that biases the estimator . Besides, th e subsp ace tracking algorithm is adopted as well to automatically up date the delay-subspace. Simulation results demonstrate that the proposed algorithm conv erg es for a wid e range of S NR’ s and Doppler’s. Index T erms —Doppl er sp read, Estimation, Su bspace tracking, OFDM, Doubly selectiv e fading channels, Comb-t ype p ilot. I . I N T RO D U C T I O N The max imum Dop pler spread is one of the key p arameters for the adaptive strategies to tune mobile commun ication systems to accommodate various radio tr ansmission environ- ments [1] and, especially , alleviate the inter-carrier interfer- ence (ICI) f or orthogo nal frequen cy division multiplexing (OFDM) systems. Most method s o f estimating the max imum Doppler spread rep orted in literatur es are categorized into two classes [2]: le vel-crossing-ra te-based and covariance-based technique s. Since the alg orithms revie wed in [2], such as [3], were not specifically de signed for OFDM systems, they did not explo it the spe cial signal structure of OFDM systems. On th e othe r hand , most alg orithms designed for OFDM systems are covariance-based. [4] determined the maximu m Doppler spr ead throug h estimating the smallest positive zero crossing p oint. Cai [5] propo sed to obtain the time co rrelation function (TCF) by explo iting th e cyclic p refix (CP) and its counterp art. Howe ver , Y ucek [6 ] co mmented that fo r scalable OFDM systems whose CP sizes were v arying along the time, it was difficult for [5] to sufficiently estimate th e T CF , theref ore Xiaochua n Zhao, T a o Peng, Ming Y ang, and W enbo W ang are with the W irele ss Signal Processing and Network Lab, and the Key L aboratory of Uni ver sal W irele ss Communicati on, Ministry of Educatio n, Beijing U ni- versi ty of Posts and T elec ommunicati ons, Beijing, China (e-mail: zhaoxi- aochua n@gmail.com). This work is sponsored in part by the National Natural Science Foundation of China under grant No.60572120 and 60602058, and by the national high technol ogy researc hing and de veloping prog ram of China (Nat ional 863 Program) und er grant No.2006AA01Z257 , and by t he Nationa l Basic Research Program of China (National 973 Program) under grant No.2007CB310602. Part of th e results in this paper was presen ted at IE EE Globa l Communications Conferen ce 2008 (IEE E GLOBECOM 2008), New Orleans, LA, USA. its accu racy would be d egraded significantly . In stead, Y ucek propo sed to estimate the maxim um Doppler spr ead by taking advantage of the perio dic training symbols. Howe ver, in order to redu ce overheads, trainin g symbols a re sparse and typically transmitted as p reambles to facilitate the frame timin g and carrier freq uency sync hronizatio n, which would cause [6 ] to conv erge slowly or even fail. In th is p aper, we pr opose to estimate the maximum D oppler spread by e xploiting th e comb -type pilot to nes [7] that are widely a dopted b y wir eless stand ards. The chan nel frequ ency responses (CFR’ s) estimated fr om the pilo t tone s are projected onto the delay-su bspace [8 ] to r educe the n oise pertur bation and then u sed to acqu ire a Dop pler dep endent par ameter . With a carefu l expan sion of the par ameter, a no nlinear high-o rder polyno mial equation is f ormed, from which the max imum Doppler spread is r eadily solved by re sorting to the Newton’ s iteration. Moreover , th e su bspace tr acking algorithm [ 9] is adopted as well to track the drifting delay -subspace. This p aper is organized as fo llows. In Section I I, the OFDM system and chan nel model are introduced . Then, the maximu m Doppler spread estimation algo rithm is pr esented in Section III. Simulation resu lts an d an alyses are pr ovided in Section IV. Finally , Section V conclu des the paper . A. Basic Notation Uppercase an d lowercase boldface letters denote matr ices and column vectors, respe cti vely . ( · ) H and || · || F denote conjuga te transposition and Frobeniu s norm, respecti vely . E ( · ) represents the mathematical expectatio n of a stoch astic pro - cess. [ · ] i and [ · ] i,j denote the i - th and ( i, j ) -th elements of a vector and a matrix, respectively . diag ( A ) den otes a diago nal matrix with the diagon al elemen ts o f A on the diago nal. I I . S Y S T E M M O D E L Consider an OFDM system with a bandwid th of B W = 1 /T Hz ( T is the sampling period). N den otes the total n umber of tones, and a CP of length L cp is inserted b efore each symbol to eliminate the inte r-block interferen ce. Thus, the whole symbol duration is T s = (1+ r cp ) N T , where r cp = L cp N . In each OFDM symbol, P tone s are transmitted as pilots to assist channe l esti mation. In addition, the optimal pilot pattern , i.e., the eq uipowered and equispa ced [ 10], is assume d. The complex baseb and m odel o f a linear time- variant mo - bile channe l with L path s can be de scribed by [11] h ( t, τ ) = X L − 1 l =0 h l ( t ) δ ( τ − τ l T ) (1) 2 where τ l ∈ R is the non-samp le-spaced de lay of the l -th pa th normalized to the sampling perio d, and h l ( t ) is the corr e- sponding com plex amplitude. Accord ing to the assumption of the wide-sense station ary uncorrelated scattering, h l ( t ) ’ s are modeled as uncorrelated nar rowband co mplex Gaussian processes. In the sequel, P ≥ L is assumed for determinability . Furthermo re, by assuming the unifor m scattering environmen t introdu ced by Clarke [12], all h l ( t ) ’ s have the iden tical nor- malized TCF , therefo re th e TCF of th e l -th path is r t,l (∆ t ) = σ 2 l J 0 (2 π f d ∆ t ) (2) where σ 2 l is th e p ower o f th e l -th path, f d is th e maxim um Doppler spread, and J 0 ( · ) is th e zeroth order Bessel func tion of the first k ind. Mor eover , the to tal power of the chann el is normalized , i.e., P L − 1 l =0 σ 2 l = 1 . Assuming a sufficient CP , i. e., L cp ≥ L , the d iscrete signal model in the frequ ency d omain is y f ( n ) = H f ( n ) x f ( n ) + n f ( n ) (3) where x f ( n ) , y f ( n ) , n f ( n ) ∈ C N × 1 are the n -th transmit- ted and r eceiv ed signal and additive white Gaussian noise (A WGN) vectors, respectively , and H f ( n ) ∈ C N × N is the channel transfer m atrix whose ( k + ν, k ) -th elem ent is [ H f ( n )] k + υ ,k = 1 N N − 1 X m =0 L − 1 X l =0 h l ( n, m ) e − j 2 π ( υ m + kτ l ) / N where h l ( n, m ) = h l ( nT s + ( L cp + m ) T ) is the samp led complex am plitude of the l -th path , an d k and υ d enote frequen cy and Doppler spread , respectively . App arently , ICI is present due to the non- diagon al H f ( n ) . Howe ver, when f d T s ≤ 0 . 1 , the signal-to- interferen ce ratio (SIR) is over 17.8 dB [1 3], which enables us to discard no n-diag onal elements of H f ( n ) with a negligible perfor mance penalty . For the comb -type p ilot p attern, o nly pilo t ton es, deno ted as y p ( n ) ∈ C P × 1 , ar e extrac ted fro m y f ( n ) . Then, appro xi- mating H f ( n ) by a diago nal m atrix, (3) is modified to y p ( n ) = X p ( n ) h p ( n ) + n p ( n ) (4) where X p ( n ) ∈ C P × P is a pre-known diagona l ma- trix, and h p ( n ) ∈ C P × 1 consists of the d iagonal e l- ements of H f ( n ) . By deno ting the instan taneous CFR as H ( n, m, k ) = P L − 1 l =0 h l ( n, m ) e − j 2 π kτ l / N , we ha ve [ h p ( n )] p = 1 N P N − 1 m =0 H ( n, m , θ p ) , where θ p is the in dex of the p -th p ilot tone. Hence, h p ( n ) is the time-averaging CFR dur ing th e n -th OFDM symbol. Besides, th e noise term n p ( n ) ∼ C N (0 , σ 2 n I P ) . I I I . M A X I M U M D O P P L E R S P R E A D E S T I M AT I O N First of all, the least-squ ared (LS) ch annel estimation on pilot tones is carried ou t at the receiver , that is, h p,ls ( n ) = X p ( n ) − 1 y p ( n ) = h p ( n ) + w p ( n ) (5) where h p,ls ( n ) ∈ C P × 1 is the LS-estimated time- av eraging CFR, and w p ( n ) = X p ( n ) − 1 n p ( n ) is the noise term. For equ ipowered and PSK-mo dulated pilot ton es, X p ( n ) H X p ( n ) = I P , theref ore w p ( n ) ∼ C N (0 , σ 2 n I P ) . By definin g the Fourier transfor m matrix F p,τ ∈ C P × L as [ F p,τ ] p,l = e − j 2 π θ p τ l / N , the 0- lag au to-corre lation matrix is R h (0) ∆ = E h p,ls ( n ) h p,ls ( n ) H = ξ 0 F p,τ DF H p,τ + σ 2 n I P (6) where D ∆ = diag ( σ 2 l ) , l = 0 , . . . , L − 1 , an d ξ 0 is ξ 0 ∆ = 1 N 2 N − 1 X m =0 N − 1 X q =0 J 0 (2 π f d ( m − q ) T ) (7) Similarly , the β -lag au to-corr elation matrix of h p,ls ( n ) is R h ( β ) ∆ = E h p,ls ( n + β ) h p,ls ( n ) H = ξ β F p,τ DF H p,τ (8) where ξ β is ξ β ∆ = 1 N 2 N − 1 X m =0 N − 1 X q =0 J 0 (2 π f d ( m − q + β (1 + r cp ) N ) T ) ( 9) If th e number of c hannel tap s is known, the d elay-subsp ace, denoted as U τ ,s ∈ C P × L , an d the variance of no ise σ 2 n can be acquired with the eigenv alu e d ecompo sition. If unk nown, howe ver , the nu mber of sign ificant tap s can be estimated by applying the minimum description length (MDL) a lgorithm [14]. Then, a Do ppler depen dent p arameter is define d as η ∆ = s || U H τ ,s R h ( β ) U τ ,s || 2 F || U H τ ,s R h (0) U τ ,s − σ 2 n I L || 2 F = ξ β ξ 0 (10) Throu gh some man ipulations (see Ap pendix A) , ξ 0 and ξ β can be expand ed into series and ap proxim ately expressed as ξ 0 = ∞ X k =0 s k ≈ ∞ X k =0 ( − ψ 2 ) k k !( k + 1)!(2 k + 1 ) (11) ξ β = ∞ X k =0 t k ≈ ∞ X k =0 ( − ψ 2 ) k k !( k + 1)!(2 k + 1) × 1 2 (1 + ϕ ) 2 k +2 + (1 − ϕ ) 2 k +2 − 2 ϕ 2 k +2 (12) where N ≫ 1 , ψ = π f d N T , and ϕ = β (1 + r cp ) . Since the absolute values of s k and t k decrease very fast, a finite nu mber, say , K , of ter ms in (1 1) and (12) are sufficient to me et the accuracy requ irement. So, with (1 0)–(12), we have X K − 1 k =0 ( t k − η s k ) = 0 (13) Let x = − ψ 2 and c k = [(1+ ϕ ) 2 k +2 +(1 − ϕ ) 2 k +2 − 2 ϕ 2 k +2 ] − 2 η 2 k !( k +1)!(2 k +1) . Then, (13) is equiv alent to X K − 1 k =0 c k x k = 0 (14) (14) is a non-line ar high-o rder polyn omial equatio n. By resorting to Ne wton’ s method , its root, denoted as x ∗ , is readily solved after numb ers of itera tions. Acco rdingly , f d is giv en b y f d = √ − x ∗ π N T (15) When the transceiver is moving , the path delays of the channel are slowly drifting [1 5] [8] , which ca uses F p ; τ to vary and so does U τ ,s . T o acc ommod ate the variation, the subspace tracking a lgorithm is ado pted to automatica lly update U τ ,s . 3 The prop osed algo rithm is summ arized in the fo llowing. It is worth notin g that its co mputation com plexity depend s o n the QR-decomp osition operation that is O ( P × L 2 ) . For sparse multipath chan nels, the comp lexity is mod erate be cause L is quite sm all. Besides, th e cho ice of K in (14) can be made accordin g to the tradeoff b etween the accuracy and complexity . After K is chosen, th e convergence of Newton’ s method is quadra tic along the numb er of iteration s. In fact, numer ical results show that less th an 4 iterations are sufficient to ach iev e a precision of 10 − 4 . Moreover , for each iteration, the first differential is readily obtained than ks to the po lynom ial co- efficients, which r educes the c omplexity of Newton’ s method considerab ly . Finally , as ξ β is oscillatingly atten uating along β , ( 14) has multiple roo ts for large β 1 . In order to converge to the specific ro ot, the initialization o f Newton’ s iter ation, therefor e, should b e carefully chosen ac cording to β . Initialize : ( n = 0 ) Q 0 (0) = Q β (0) = [ I L m , 0 T L m ,P − L m ] T A 0 (0) = A β (0) = 0 P ,L m , C 0 (0) = C β (0) = I L m Run : ( n = n + 1 ) Input: h p,ls ( n ) Step 1: Updating eigenvalues of R h (0) : Z 0 ( n ) = h p,ls ( n ) h p,ls ( n ) H A 0 ( n ) = α A 0 ( n − 1) C 0 ( n − 1) + (1 − α ) Z 0 ( n ) Q 0 ( n − 1) H A 0 ( n ) = Q 0 ( n ) R 0 ( n ) : QR-fac torization C 0 ( n ) = Q 0 ( n − 1) H Q 0 ( n ) Step 2: Updating eigenvalues of R h ( β ) : Z β ( n ) = h p,ls ( n ) h p,ls ( n − β ) H A β ( n ) = α A β ( n − 1) C β ( n − 1) + (1 − α ) Z β ( n ) Q β ( n − 1) H A β ( n ) = Q β ( n ) R β ( n ) : QR-fac torization C β ( n ) = Q β ( n − 1) H Q β ( n ) Step 3: Estimating L and σ 2 n : ˆ L = M D L ( diag ( R 0 ( n ))) , ˆ σ 2 n = 1 P − ˆ L P P p = ˆ L +1 [ R 0 ( n )] p,p Step 4: Estimating η according to (10): ˆ η = s P ˆ L ( n ) l =1 [ R β ( n ) ] l,l 2 P ˆ L ( n ) l =1 | [ R 0 ( n )] l,l − ˆ σ 2 n | 2 Step 5: Estimating f d by (14) and (15). Remark : α is an exp onential forgetting factor close to 1. L m is the maximum rank to be tested. M D L ( · ) denotes the MDL detector. In simulation s, we set α = 0 . 995 , β = 1 , L m = 10 , K = 8 , and the precision threshold of Newton iteration and the maximum number of iterations as 10 − 4 and 4, respectively . I V . S I M U L AT I O N R E S U LT S The pe rforman ce of the propo sed alg orithm is ev alu ated f or an OFDM system with B W = 1 2 MHz ( T = 1 / B W = 83 . 3 ns), N = 102 4 , L cp = 128 and P = 128 . T wo 3 GPP E- UTRA channel models are adop ted: Extended V ehicular A model (EV A) and Ex tended T y pical Urba n model (ETU) [16] . The delay pro file of EV A is [ 0 , 30 , 150 , 310 , 370 , 710 , 1090 , 1 For applied OFDM systems, (14) has only one negati ve root close to zero when β ≤ 4 . 1730 , 2510 ] ns, and its power pro file is [ 0 . 0 , − 1 . 5 , − 1 . 4 , − 3 . 6 , − 0 . 6 , − 9 . 1 , − 7 . 0 , − 12 . 0 , − 16 . 9 ] d B. For ETU, they are [ 0 , 50 , 120 , 20 0 , 230 , 500 , 160 0 , 2300 , 5000 ] ns an d [ − 1 . 0 , − 1 . 0 , − 1 . 0 , 0 . 0 , 0 . 0 , 0 . 0 , − 3 . 0 , − 5 . 0 , − 7 . 0 ] dB, resp ectiv ely . The classic Do ppler sp ectrum, i.e., Jakes’ sp ectrum [1 1], is applied to generate th e Rayleigh fading chann els. In Fig.1, the prop osed algorithm is evaluated fo r f d = 200 , 400 , and 6 00 Hz, re spectiv ely , with in a wide rang e o f SNR’ s. And two du rations of ob servation ( 20 and 40 ms) are adopted to acquire the sam ple auto- correlation m atrices. From the figure, it is evident that the perf ormance of the pr oposed alg o- rithm is robust when S N R ≥ 5 dB, since th e delay-sub space effecti vely redu ces th e n oise d isturbance. Further more, the estimation accu racy is rather high f or f d ≥ 400 Hz and the 40 m s o bservation but somewhat deter iorated for 200 Hz and 20 ms. It is accounted for th e accum ulation process of the sample matr ices: the larger the ma ximum Dop pler spread is, the faster the CFR upd ates; the longer the duration is, the more sufficient the sample m atrices ar e. When f d is y et smaller, say , 50 Hz, the p ropo sed algo rithm, nevertheless, may fail with the 40 ms ob servation d ue to th e in sufficient sample matrices. Besides, a simplified version of the pr oposed algorithm [17] still outperf orms the CP-based algor ithm [ 5]. The convergence of the propo sed algor ithm is verified with various Dopp ler’ s, i.e., f d = 6 0 0 , 400 , 20 0 Hz, when S N R = 15 dB for EV A and ETU chan nels, resp ectiv ely . As plo tted in Fig.2, the estimated f d ’ s converge after hun dreds of samples. Furthermo re, since the CFR upd ates faster when f d is larger, the conv ergence speed is faster f or larger f d than smaller . In addition, for all the curves drawn in Fig.2, the estimated values fluctuate arou nd their true ones within a certain range, an d th e variations ar e larger f or smaller f d ’ s b ecause of the sensiti vity to the estimatio n error o f η in (1 0) wh en f d T s is small. If necessary , an averaging/smoothing window over the o utput of the propo sed algor ithm c an be applied to sup ply a more stable estimation. V . C O N C L U S I O N S The maximu m Dopp ler spr ead is crucial fo r adaptive strate- gies in OFDM systems. In this paper, we pro pose a subspace - based maxim um Dop pler spread estimatio n algorith m appli- cable to the co mb-typ e pilo t p attern. By trac king the dr ifting delay-sub space, the noise is greatly reduced . And by solv ing the p olynom ial equation with the Newton’ s method , high accuracy can b e ach iev ed with mo derate com plexity . The perfor mance of the pr oposed alg orithm is demon strated to be robust over a wide range of SNR’ s and Do ppler’ s by simulations. Besides, the prop osed algorithm can be readily integrated into the channel estimators with the subspace tracker [8] [18 ], wh ich lends a b road application pro mise to it. A P P E N D I X A A P P RO X I M AT I O N S O F ξ 0 A N D ξ β The Maclaku tin series o f J 0 ( z ) is [19 ] J 0 ( z ) = ∞ X k =0 ( − 1) k 2 2 k ( k !) 2 z 2 k (16) 4 - 5 0 5 1 0 1 5 2 0 2 5 3 0 3 5 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0 5 0 0 5 5 0 6 0 0 6 5 0 E st . M a x. D o p p l e r S p r e a d ( H z) S N R ( d B ) f d = 6 0 0 H z, E V A , 4 0 m s f d = 6 0 0 H z, E V A , 2 0 m s f d = 6 0 0 H z, E T U , 4 0 m s f d = 6 0 0 H z, E T U , 2 0 m s f d = 4 0 0 H z, E V A , 4 0 m s f d = 4 0 0 H z, E V A , 2 0 m s f d = 4 0 0 H z, E T U , 4 0 m s f d = 4 0 0 H z, E T U , 2 0 m s f d = 2 0 0 H z, E V A , 4 0 m s f d = 2 0 0 H z, E V A , 2 0 m s f d = 2 0 0 H z, E T U , 4 0 m s f d = 2 0 0 H z, E T U , 2 0 m s Fig. 1. The performance ev aluation for the proposed algorith ms for EV A and ETU channel s with diffe rent amounts of samples and Doppler’ s. hence (9) is rewritten as ξ β = ∞ X k =0 t k = ∞ X k =0 ( − 1) k ( k ! N ) 2 N − 1 X m 1 =0 N − 1 X m 2 =0 { π f d T [( m 1 − m 2 ) + β (1 + r cp ) N ] } 2 k (17) Denoting ψ = π f d N T and ϕ = β (1 + r cp ) , t k is fu rther expanded as t k = ( − ψ 2 ) k ( k ! N ) 2 N − 1 X m 1 =0 N − 1 X m 2 =0 2 k X p =0 C p 2 k ϕ 2 k − p × p X q =0 C q p ( m 1 N ) q ( − m 2 N ) p − q = ( − ψ 2 ) k ( k !) 2 2 k X p =0 C p 2 k ϕ 2 k − p p X q =0 C q p × " 1 N N − 1 X m 1 =0 ( m 1 N ) q # " 1 N N − 1 X m 2 =0 ( − m 2 N ) p − q # (18) When N ≫ 1 , we have 1 N N − 1 X m 1 =0 ( m 1 N ) q ≈ 1 q + 1 , 1 N N − 1 X m 2 =0 ( − m 2 N ) p − q ≈ ( − 1) p − q p − q + 1 Thus, t k can be appr oximated as t k ≈ ( − ψ 2 ) k ( k !) 2 2 k X p =0 C p 2 k ϕ 2 k − p 1 + ( − 1) p ( p + 1)( p + 2) = ( − ψ 2 ) k k !( k + 1)!(2 k + 1 ) × 1 2 (1 + ϕ ) 2 k +2 + (1 − ϕ ) 2 k +2 − 2 ϕ 2 k +2 (19) Similarly , by letting β = 0 in (19), ( 7) is expan ded and approx imated as ξ 0 = ∞ X k =0 s k ≈ ∞ X k =0 ( − ψ 2 ) k k !( k + 1)!(2 k + 1) (20) 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0 5 0 0 5 5 0 6 0 0 6 5 0 7 0 0 7 5 0 8 0 0 8 5 0 E st . M a x. D o p p l e r S p r e a d ( H z) S y m b o l I n d e x f d = 6 0 0 H z, E V A f d = 6 0 0 H z, E T U f d = 4 0 0 H z, E V A f d = 4 0 0 H z, E T U f d = 2 0 0 H z, E V A f d = 2 0 0 H z, E T U Fig. 2. The con vergenc e of the proposed algorithm when S N R = 15 dB and β = 1 for EV A and ETU channels. R E F E R E N C E S [1] M. Chu et al. , “Effect of Mobile V elocity on Communication in Fading Channel s, ” IEEE T rans. V eh. T echnol. , vol. 49, pp. 202–210, Jan. 2000. [2] C. T epedelenli oglu et al. , “Estimation of Doppler Spread and Signal Strength in Mobile Communica tions with Applicat ions to Handoff and Adapti ve Tran smission, ” W ir el. Commun. Mob . Comput. , vol. 1, pp. 221– 242, Aug. 2001. [3] C.T epedelenl ioglu et al. , “On V elocity Estimation and Correlation Prop- erties of Narro w-Band Mobile Communicat ion Channels, ” IEE E T rans. V eh. T ech nol. , vol. 50, pp. 1039–1052, Jul. 2001. [4] H. Schober et al. , “V elocity Es timatio n for OFDM Based Communica- tion S ystems, ” in IEEE VTC-F all 2002 , vol . 2, V ancou ver , BC, Canada, 2002, pp. 715–718. [5] J. Cai et al. , “Doppler Spread E stimation for Mobile OFDM Systems in Rayleig h Fading Channel s, ” IEEE T rans. Consum. Electr on. , vol. 49, pp. 973–977, Nov . 2003. [6] T . Y ucek et al. , “Doppler S pread E stimation for Wir eless OFDM Sys- tems, ” in IEEE/Sarnoff Symposium on Advances in W ired and W ireless Communicat ion , 2005, pp. 233–236. [7] S. Coleri et al. , “Channel Estimation T echniques Based on Pilot Ar- rangement in OFDM Systems, ” vol. 48, pp. 223–229, Sep. 2002. [8] O. Simeone et al. , “Pilot -Based Channel E stimation for OFDM Systems by Tracking the Delay-Subspace, ” vol. 3, pp. 315–325, Jan. 2004. [9] P . Strobach , “Low-Ra nk Adaptiv e Filters, ” IEE E T rans. Signal P r ocess. , vol. 44, pp. 2932–2947, Dec. 1996. [10] S. Ohno et al. , “Capa city Maximizing MMSE-Optimal Pilots for Wire - less OFDM Over Frequenc y-Sele cti ve Blo ck Rayleigh-Fadi ng Chan- nels, ” IEEE T rans. Inf. Theory , vol . 50, pp. 2138–2145, Sep. 2004. [11] R. Steele , Mobile Radio Communic ations . IEEE Press, 1992. [12] R. Clark e, “A Statistical Theory of Mobile Radio Reception , ” B ell Syst. T ec h. J . , pp. 957–1000, Jul.-Aug. 1968. [13] Y . Choi et al. , “On Channel Estimation and Detection for Multic arrier Signals in Fast and Selecti ve Rayleigh Fading Channel s, ” IEE E T rans. Commun. , vol . 49, pp. 1375–1387, Aug. 2001. [14] M. W ax et al. , “Detection of Signals by Information Theoretic Criteri a, ” IEEE T rans. Acoust., Speech, Signal Proce ss. , vol. 33, pp. 387–392, Apr . 1985. [15] D. Tse et al. , Fundamentals of Wirel ess Communication . New Y ork: Cambridge Unive rsity Press, 2005. [16] “3GPP TS 36.101 v8.2.0 – Evolve d Unive rsal Terrestrial Radio Access (E-UTRA); User Equipment (UE) Radio Transmission and Recepti on (Relasa se 8), ” 3GPP , May 2008. [17] X. Zhao and others, “Doppler Spread E stimatio n by Subspace Tracking for OFDM Systems, ” in IEEE GLOBECOM 2008 , New Orleans, LA, USA, Nov . 2008. [18] M. Raghav endra et al. , “Paramet ric Channel Estimation for Pseudo- Random Tile-Alloc ation in Uplink OFDMA, ” IEEE T rans. Signal P r o- cess. , vol . 55, pp. 5370–5381, Nov . 2007. [19] E. W eisstein, “Bessel Function of t he First Ki nd, ” From MathW orld - A W olfram W eb Resource. [Online]. A vail able: http:/ /mathw orld.wol fram.com/BesselFunctionoftheFirstKind.html
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment