Interpolation-Based QR Decomposition in MIMO-OFDM Systems
Detection algorithms for multiple-input multiple-output (MIMO) wireless systems based on orthogonal frequency-division multiplexing (OFDM) typically require the computation of a QR decomposition for each of the data-carrying OFDM tones. The resulting…
Authors: Davide Cescato, Helmut B"olcskei
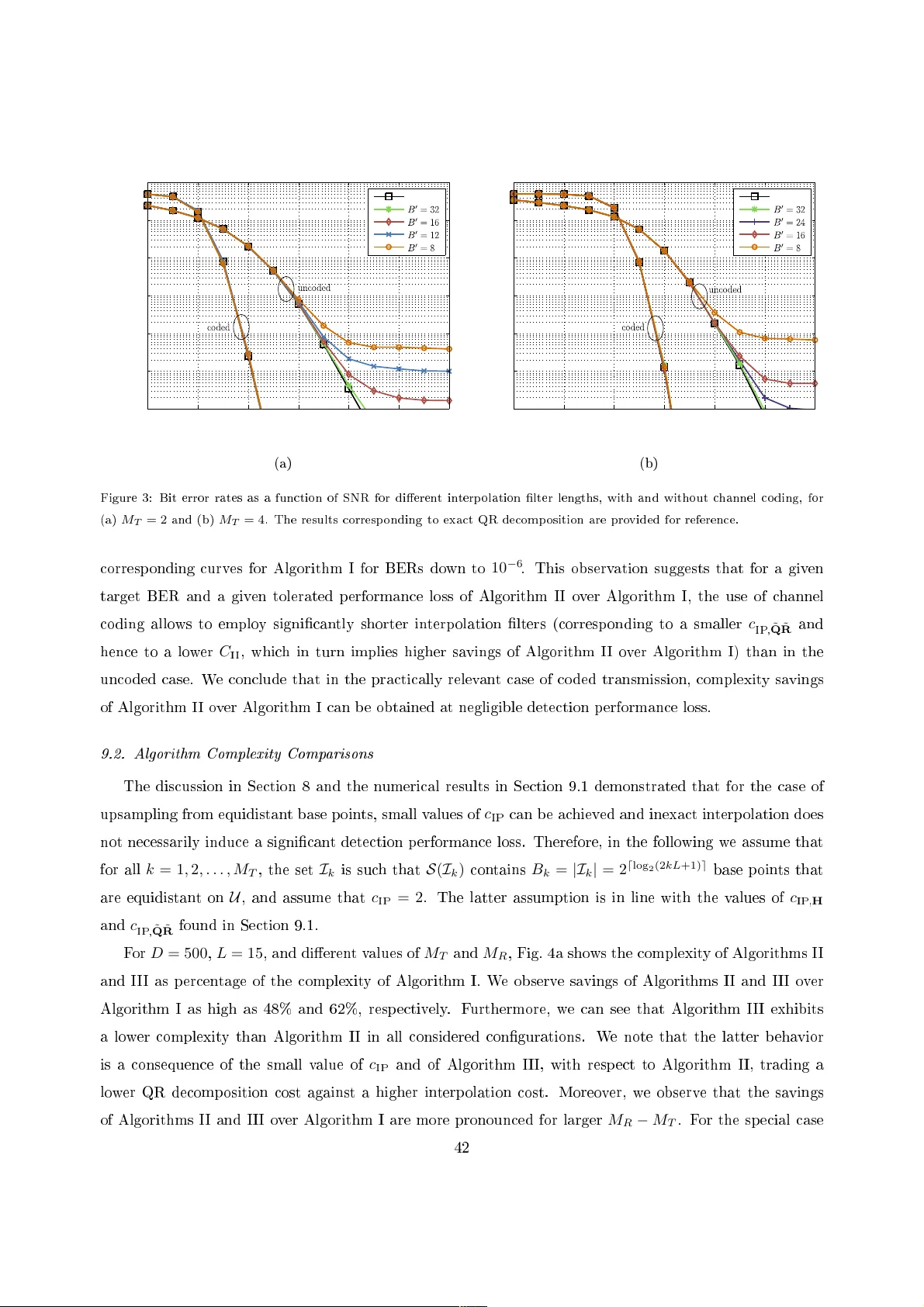
In terp olation-Based QR Deomp osition in MIMO-OFDM Systems ✩ , ✩✩ Da vide Cesato a , Helm ut Bölsk ei ∗ ,a a Communi ation T e hnolo gy L ab or atory, ETH Zurih, 8092 Zurih, Switzerland Abstrat Detetion algorithms for m ultiple-input m ultiple-output (MIMO) wireless systems based on orthogonal frequeny-division m ultiplexing (OFDM) t ypially require the omputation of a QR deomp osition for ea h of the data-arrying OFDM tones. The resulting omputational omplexit y will, in general, b e signian t, as the n um b er of data-arrying tones ranges from 48 (as in the IEEE 802.11a/g standards) to 1728 (as in the IEEE 802.16e standard). Motiv ated b y the fat that the hannel matries arising in MIMO-OFDM systems are highly o v ersampled p olynomial matries, w e form ulate in terp olation-based QR deomp osition algorithms. An in-depth omplexit y analysis, based on a metri relev an t for v ery large sale in tegration (VLSI) imple- men tations, sho ws that the prop osed algorithms, for suien tly high n um b er of data-arrying tones and suien tly small hannel order, pro v ably exhibit signian tly smaller omplexit y than brute-fore p er-tone QR deomp osition. Key wor ds: In terp olation, p olynomial matries, m ultiple-input m ultiple-output (MIMO) systems, orthogonal frequeny-division m ultiplexing (OFDM), QR deomp osition, suessiv e anelation, sphere deo ding, v ery large sale in tegration (VLSI). 1. In tro dution and Outline The use of orthogonal frequeny-division m ultiplexing (OFDM) drastially redues data detetion om- plexit y in wideband m ultiple-input m ultiple-output (MIMO) wireless systems b y deoupling a frequeny- seletiv e fading MIMO hannel in to a set of at-fading MIMO hannels. Nev ertheless, MIMO-OFDM dete- tors still p ose signian t hallenges in terms of omputational omplexit y , as pro essing has to b e p erformed on a p er-tone basis with the n um b er of data-arrying tones ranging from 48 (as in the IEEE 802.11a/g wireless lo al area net w ork standards) to 1728 (as in the IEEE 802.16 wireless metrop olitan area net w ork standard). ✩ This w ork w as supp orted in part b y the Swiss National Siene F oundation under gran t No. 200021-100025/1. ✩✩ P arts of this pap er w ere presen ted at the Sixth IEEE W orkshop on Signal Pro essing A dv anes in Wireless Comm uniations (SP A W C), New Y ork, NY, June 2005. ∗ Corresp onding author. T el.: +41 44 632 3433, fax: +41 44 632 1209. Email addr esses: desatonari.ee.ethz.h (Da vide Cesato), boelskeinari.ee.ethz.h (Helm ut Bölsk ei) Pr eprint submitte d to Elsevier Novemb er 1, 2018 Sp eially , in the setting of oheren t MIMO-OFDM detetion, for whi h the reeiv er is assumed to ha v e p erfet hannel kno wledge, linear MIMO-OFDM detetors [13 ℄ require matrix in v ersion, whereas suessiv e anelation reeiv ers [21 ℄ and sphere deo ders [ 5, 17 ℄ require QR deomp osition, in all ases on ea h of the data-arrying OFDM tones. The orresp onding omputations, termed as pr epr o essing in the follo wing, ha v e to b e p erformed at the rate of hange of the hannel whi h, dep ending on the propagation en viron- men t, is t ypially m u h lo w er than the rate at whi h the transmission of atual data sym b ols tak es plae. Nev ertheless, as pa yload data reeiv ed during the prepro essing phase m ust b e stored in a dediated buer, prepro essing represen ts a ma jor b ottlene k in terms of the size of this buer and the resulting detetion lateny [14 ℄. In a v ery large sale in tegration (VLSI) implemen tation, the straigh tforw ard approa h to reduing the prepro essing lateny is to emplo y parallel pro essing o v er m ultiple matrix in v ersion or QR deomp osition units, whi h, ho w ev er, omes at the ost of inreased silion area. In [1℄, the problem of reduing prepro ess- ing omplexit y in linear MIMO-OFDM reeiv ers is addressed on an algorithmi lev el b y form ulating eien t in terp olation-based algorithms for matrix in v ersion that tak e the p olynomial nature of the MIMO-OFDM hannel matrix expliitly in to aoun t. Sp eially , the algorithms prop osed in [1℄ exploit the fat that the hannel matries arising in MIMO-OFDM systems are p olynomial matries that are highly o v ersampled on the unit irle. The goal of the presen t pap er is to devise omputationally eien t in terp olation-based algorithms for QR deomp osition in MIMO-OFDM systems. Although throughout the pap er w e fo us on QR deomp osition in the on text of oheren t MIMO-OFDM detetors, our results also apply to transmit pre- o ding s hemes for MIMO-OFDM (under the assumption of p erfet hannel kno wledge at the transmitter) requiring p er-tone QR deomp osition [ 20 ℄. Contributions. Our on tributions an b e summarized as follo ws: • W e presen t a new result on the QR deomp osition of Lauren t p olynomial (LP) matries, based on whi h in terp olation-based algorithms for QR deomp osition in MIMO-OFDM systems are form ulated. • Using a omputational omplexit y metri relev an t for VLSI implemen tations, w e demonstrate that, for a wide range of system parameters, the prop osed in terp olation-based algorithms exhibit signian tly smaller omplexit y than brute-fore p er-tone QR deomp osition. • W e presen t dieren t strategies for eien t LP in terp olation that tak e the sp ei struture of the problem at hand in to aoun t and thereb y enable (often signian t) omputational omplexit y sa vings of in terp olation-based QR deomp osition. • W e pro vide a n umerial analysis of the trade-o b et w een the omputational omplexit y of the in ter- p olation-based QR deomp osition algorithms presen ted and the p erformane of orresp onding MIMO- OFDM detetors. 2 Outline of the p ap er. In Setion 2 , w e presen t the mathematial preliminaries needed in the rest of the pap er. In Setion 3, w e briey review the use of QR deomp osition in MIMO-OFDM reeiv ers, and w e form ulate the problem statemen t. In Setion 4 , w e presen t our main te hnial result on the QR deom- p osition of LP matries. This result is then used in Setion 5 to form ulate in terp olation-based algorithms for QR deomp osition of MIMO-OFDM hannel matries. Setion 6 on tains an in-depth omputational omplexit y analysis of the prop osed algorithms. In Setion 7 , w e desrib e the appliation of the new ap- proa h to the QR deomp osition of the augmen ted MIMO-OFDM hannel matries arising in the on text of minim um mean-square error (MMSE) reeiv ers. In Setion 8, w e disuss metho ds for LP in terp olation that exploit the sp ei struture of the problem at hand and exhibit lo w VLSI implemen tation omplexit y . Setion 9 on tains n umerial results on the omputational omplexit y of the prop osed in terp olation-based QR deomp osition algorithms along with a disussion of the trade-o b et w een algorithm omplexit y and MIMO-OFDM reeiv er p erformane. W e onlude in Setion 10 . 2. Mathematial Preliminaries 2.1. Notation C P × M denotes the set of omplex-v alued P × M matries. U , { s ∈ C : | s | = 1 } indiates the unit irle. ∅ is the empt y set. |A| stands for the ardinalit y of the set A . mo d is the mo dulo op erator. All logarithms are to the base 2. E [ · ] denotes the exp etation op erator. C N ( 0 , K ) stands for the m ultiv ariate, irularly-symmetri omplex Gaussian distribution with o v ariane matrix K . Throughout the pap er, w e use the follo wing on v en tions. First, if k 2 < k 1 , P k 2 k = k 1 α k = 0 , regardless of α k . Seond, sequenes of in tegers of the form k 1 , k 1 + ∆ , . . . , k 2 , with ∆ > 0 , simplify to the sequene k 1 , k 2 if k 2 = k 1 + ∆ , to the single v alue k 1 if k 2 = k 1 , and to the empt y sequene if k 2 < k 1 . A ∗ , A T , A H , A † , rank( A ) , and ran( A ) denote the en trywise onjugate, the transp ose, the onjugate transp ose, the pseudoin v erse, the rank, and the range spae, resp etiv ely , of the matrix A . [ A ] p,m indiates the en try in the p th ro w and m th olumn of A . A p 1 ,p 2 and A m 1 ,m 2 stand for the submatrix giv en b y the ro ws p 1 , p 1 + 1 , . . . , p 2 of A and the submatrix giv en b y the olumns m 1 , m 1 + 1 , . . . , m 2 of A , resp etiv ely . F urthermore, w e set A p 1 ,p 2 m 1 ,m 2 , ( A m 1 ,m 2 ) p 1 ,p 2 and A H m 1 ,m 2 , ( A m 1 ,m 2 ) H . A P × M matrix A is said to b e upp er triangular if all en tries b elo w its main diagonal { [ A ] k,k : k = 1 , 2 , . . . , min( P , M ) } are equal to zero. det( A ) and adj( A ) denote the determinan t and the adjoin t of a square matrix A , resp etiv ely . diag( a 1 , a 2 , . . . , a M ) indiates the M × M diagonal matrix with the salar a m as its m th main diagonal elemen t. I M stands for the M × M iden tit y matrix, 0 denotes the all-zeros matrix of appropriate size, and W M is the M × M disrete F ourier transform matrix, giv en b y [ W M ] p +1 ,q +1 = e − j 2 πpq / M ( p, q = 0 , 1 , . . . , M − 1 ). Finally , orthogonalit y and norm of omplex-v alued v etors a 1 , a 2 are indued b y the inner pro dut a H 1 a 2 . 3 2.2. QR De omp osition Throughout this setion, w e onsider a matrix A = [ a 1 a 2 · · · a M ] ∈ C P × M with P ≥ M , where a k denotes the k th olumn of A ( k = 1 , 2 , . . . , M ) . In the remainder of the pap er, the term QR deomp osition refers to the follo wing: Denition 1. W e all an y fatorization A = QR , for whi h the matries Q ∈ C P × M and R ∈ C M × M satisfy the follo wing onditions, a QR de omp osition of A with QR fators Q and R : 1. the nonzero olumns of Q are orthonormal 2. R is upp er triangular with real-v alued nonnegativ e en tries on its main diagonal 3. R = Q H A Pratial algorithms for QR deomp osition are either based on Gram-S hmidt (GS) orthonormalization or on unitary transformations (UT). W e next briey review b oth lasses of algorithms. GS-based QR deom- p osition is summarized as follo ws. F or k = 1 , 2 , . . . , M , the k th olumn of Q , denoted b y q k , is determined b y y k , a k − k − 1 X i =1 q H i a k q i (1) with q k = y k √ y H k y k , y k 6 = 0 0 , y k = 0 (2) whereas the k th ro w of R , denoted b y r T k , is giv en b y r T k = q H k A . (3) UT-based QR deomp osition of A is p erformed b y left-m ultiplying A b y the pro dut Θ U · · · Θ 2 Θ 1 of P × P unitary matries Θ u , where the sequene of matries Θ 1 , Θ 2 , . . . , Θ U and the parameter U are not unique and are hosen su h that the P × M matrix Θ U · · · Θ 2 Θ 1 A is upp er triangular with nonnegativ e real- v alued en tries on its main diagonal. The matries Θ u are t ypially either Giv ens rotation matries [ 6℄ or Householder reetion matries [6℄. With R , ( Θ U · · · Θ 2 Θ 1 A ) 1 ,M and Q , (( Θ U · · · Θ 2 Θ 1 ) H ) 1 ,M , w e obtain that Q H A = R and, sine Θ U · · · Θ 2 Θ 1 is unitary , that Q H Q = I M . Therefore, Q and R are QR fators of A . F or P > M , w e note that the P × ( P − M ) matrix Q ⊥ , (( Θ U · · · Θ 2 Θ 1 ) H ) M +1 ,P satises ( Q ⊥ ) H Q ⊥ = I P − M and Q H Q ⊥ = 0 . In pratie, UT-based QR deomp osition of A an b e p erformed as follo ws [6 , 3 ℄. A P × M matrix X and a P × P matrix Y are initialized as X ← A and Y ← I P , resp etiv ely , and the oun ter u is set to zero. Then, u is inremen ted b y one, and X and Y are up dated aording to X ← Θ u X and Y ← Θ u Y , for an appropriately hosen matrix Θ u . This up date step is rep eated un til X 4 b eomes upp er-triangular with nonnegativ e real-v alued en tries on its main diagonal. The parameter U is obtained as the nal v alue of the oun ter u , and the nal v alues of X and Y are X = R 0 , Y = Q H ( Q ⊥ ) H . Sine the u th up date step an b e represen ted as [ X Y ] ← Θ u [ X Y ] , w e an desrib e UT-based QR de- omp osition of A b y means of the formal relation Θ U · · · Θ 2 Θ 1 A I P = R Q H 0 ( Q ⊥ ) H (4) whi h, from no w on, will b e alled standar d form of UT-based QR deomp osition, and will b e needed in Setion 7.1 in the on text of regularized QR deomp osition. The standard form (4) sho ws that for P > M , UT-based QR deomp osition yields the ( P − M ) × P matrix ( Q ⊥ ) H as a b y-pro dut. F or P = M , the righ t-hand side (RHS) of (4 ) redues to [ R Q H ] . W e note that sine y 1 = 0 is equiv alen t to a 1 = 0 and y k = 0 is equiv alen t to rank( A 1 ,k − 1 ) = rank( A 1 ,k ) ( k = 2 , 3 , . . . , M ) [ 9 ℄, GS-based QR deomp osition sets M − rank( A ) olumns of Q and the orresp onding M − r ank( A ) ro ws of R to zero. In on trast, UT-based QR deomp osition yields a matrix Q su h that Q H Q = I M , regardless of the v alue of rank( A ) , and sets M − r ank ( A ) en tries on the main diagonal of R to zero [6℄. Hene, for rank( A ) < M , dieren t QR deomp osition algorithms will in general pro due dieren t QR fators. Prop osition 2. If rank( A ) = M , Conditions 1 and 2 of Denition 1 simplify, r esp e tively, to 1. Q H Q = I M 2. R is upp er triangular with [ R ] k,k > 0 , k = 1 , 2 , . . . , M wher e as Condition 3 is r e dundant. Mor e over, A has unique QR fators. Pr o of. Sine A = QR implies rank( A ) ≤ min { rank( Q ) , rank( R ) } , it follo ws from rank( A ) = M that rank( Q ) = rank( R ) = M . No w, rank( Q ) = M implies that the P × M matrix Q an not on tain all- zero olumns, and hene Condition 1 is equiv alen t to Q H Q = I M . Moreo v er, rank( R ) = M implies det( R ) 6 = 0 and, sine R is upp er triangular, w e ha v e det( R ) = Q M k =1 [ R ] k,k . Hene, Condition 2 b eomes [ R ] k,k > 0 , k = 1 , 2 , . . . , M . Condition 3 is redundan t sine A = QR , together with Q H Q = I M , implies Q H A = R . The uniqueness of Q and R is pro v en in [ 9℄, Se. 2.6. W e onlude b y noting that for full-rank A , the uniqueness of Q and R implies that A = QR an b e alled the QR deomp osition of A with the QR fators Q and R . 5 2.3. L aur ent Polynomials and Interp olation In the remainder of the pap er, the term interp olation indiates LP in terp olation, as presen ted in this setion. In terp olation is a en tral omp onen t of the algorithms for eien t QR deomp osition of p olynomial matries presen ted in Setions 5 and 7. In the follo wing, w e review basi results on in terp olation and establish the orresp onding notation. In Setion 8, w e will presen t v arious strategies for omputationally eien t in terp olation tailored to the problem at hand. Denition 3. Giv en a matrix-v alued funtion A : U → C P × M and in tegers V 1 , V 2 ≥ 0 , the notation A ( s ) ∼ ( V 1 , V 2 ) indiates that there exist o eien t matries A v ∈ C P × M , v = − V 1 , − V 1 + 1 , . . . , V 2 , su h that A ( s ) = V 2 X v = − V 1 A v s − v , s ∈ U . (5) If A ( s ) ∼ ( V 1 , V 2 ) , then A ( s ) is a L aur ent p olynomial (LP) matrix with maximum de gr e e V 1 + V 2 . Before disussing in terp olation, w e briey list the follo wing statemen ts whi h follo w diretly from Def- inition 3 . First, A ( s ) ∼ ( V 1 , V 2 ) implies A ( s ) ∼ ( V ′ 1 , V ′ 2 ) for an y V ′ 1 ≥ V 1 , V ′ 2 ≥ V 2 . Moreo v er, sine for s ∈ U w e ha v e s ∗ = s − 1 , A ( s ) ∼ ( V 1 , V 2 ) implies A H ( s ) ∼ ( V 2 , V 1 ) . Finally , giv en LP matri- es A 1 ( s ) ∼ ( V 11 , V 12 ) and A 2 ( s ) ∼ ( V 21 , V 22 ) , if A 1 ( s ) and A 2 ( s ) ha v e the same dimensions, then ( A 1 ( s ) + A 2 ( s )) ∼ (ma x ( V 11 , V 21 ) , max( V 12 , V 22 )) , whereas if the dimensions of A 1 ( s ) and A 2 ( s ) are su h that the matrix pro dut A 1 ( s ) A 2 ( s ) is dened, then A 1 ( s ) A 2 ( s ) ∼ ( V 11 + V 21 , V 12 + V 22 ) . In the remainder of this setion, w e review basi results on in terp olation b y onsidering the LP a ( s ) ∼ ( V 1 , V 2 ) with maxim um degree V , V 1 + V 2 . The follo wing results an b e diretly extended to the in terp o- lation of LP matries through en trywise appliation. Borro wing terminology from signal analysis, w e all the v alue of a ( s ) at a giv en p oin t s 0 ∈ U the sample a ( s 0 ) . Denition 4. Interp olation of the LP a ( s ) ∼ ( V 1 , V 2 ) from the set B = { b 0 , b 1 , . . . , b B − 1 } ⊂ U , on taining B distint b ase p oints , to the set T = { t 0 , t 1 , . . . , t T − 1 } ⊂ U , on taining T distint tar get p oints, is the pro ess of obtaining the samples a ( t 0 ) , a ( t 1 ) , . . . , a ( t T − 1 ) from the samples a ( b 0 ) , a ( b 1 ) , . . . , a ( b B − 1 ) , with kno wledge of V 1 and V 2 , but without expliit kno wledge of the o eien ts a − V 1 , a − V 1 +1 , . . . , a V 2 that determine a ( s ) aording to (5). In the follo wing, w e assume that B ≥ V + 1 . By dening the v etors a , [ a − V 1 a − V 1 +1 · · · a V 2 ] T , a B , [ a ( b 0 ) a ( b 1 ) · · · a ( b B − 1 )] T , and a T , [ a ( t 0 ) a ( t 1 ) · · · a ( t T − 1 )] T , w e note that a B = Ba , with the B × ( V + 1) b ase p oint matrix B , b V 1 0 b V 1 − 1 0 · · · b − V 2 0 b V 1 1 b V 1 − 1 1 · · · b − V 2 1 . . . . . . . . . . . . b V 1 B − 1 b V 1 − 1 B − 1 · · · b − V 2 B − 1 (6) 6 and a T = T a , with the T × ( V + 1) tar get p oint matrix T , t V 1 0 t V 1 − 1 0 · · · t − V 2 0 t V 1 1 t V 1 − 1 1 · · · t − V 2 1 . . . . . . . . . . . . t V 1 T − 1 t V 1 − 1 T − 1 · · · t − V 2 T − 1 . (7) No w, B an b e written as B = D B V B , where D B , diag ( b V 1 0 , b V 1 1 , . . . , b V 1 B − 1 ) and V B is the B × ( V + 1) V andermonde matrix V B , 1 b − 1 0 · · · b − ( V 1 + V 2 ) 0 1 b − 1 1 · · · b − ( V 1 + V 2 ) 1 . . . . . . . . . . . . 1 b − 1 B − 1 · · · b − ( V 1 + V 2 ) B − 1 . Sine the base p oin ts b 0 , b 1 , . . . , b B − 1 are distint, V B has full rank [9℄. Hene, rank( V B ) = V + 1 , whi h, together with the fat that D B is nonsingular, implies that rank( B ) = V + 1 . Therefore, the o eien t v etor a is uniquely determined b y the B samples of a ( s ) at the base p oin ts b 0 , b 1 , . . . , b B − 1 aording to a = B † a B , and in terp olation of a ( s ) from B to T an b e p erformed b y omputing a T = TB † a B . (8) In the remainder of the pap er, w e all the T × B matrix TB † the interp olation matrix . W e onlude this setion b y noting that in the sp eial ase V 1 = V 2 , w e ha v e B = B ∗ E and T = T ∗ E , where the ( V + 1) × ( V + 1) matrix E is obtained b y ipping I V +1 upside do wn. Sine the op eration of taking the pseudoin v erse omm utes with en trywise onjugation, it follo ws that B † = E ( B † ) ∗ and, as a onsequene of E 2 = I V +1 , w e obtain TB † = ( TB † ) ∗ , i.e., the in terp olation matrix is real-v alued. 3. Problem Statemen t 3.1. MIMO-OFDM System Mo del W e onsider a MIMO system [13 ℄ with M T transmit and M R reeiv e an tennas. Throughout the pap er, w e fo us on the ase M R ≥ M T . The matrix-v alued impulse resp onse of the frequeny-seletiv e MIMO hannel is giv en b y the taps H l ∈ C M R × M T ( l = 0 , 1 , . . . , L ) with the orresp onding matrix-v alued transfer funtion H e j 2 πθ = L X l =0 H l e − j 2 πlθ , 0 ≤ θ < 1 whi h satises H ( s ) ∼ (0 , L ) . In a MIMO-OFDM system with N OFDM tones and a yli prex of length L CP ≥ L samples, the equiv alen t input-output relation for the n th tone is giv en b y d n = H s n c n + w n , n = 0 , 1 , . . . , N − 1 7 with the transmit signal v etor c n , [ c n, 1 c n, 2 · · · c n,M T ] T , the reeiv e signal v etor d n , [ d n, 1 d n, 2 · · · d n,M R ] T , the additiv e noise v etor w n , and s n , e j 2 πn/ N . Here, c n,m stands for the omplex-v alued data sym b ol, tak en from a nite onstellation O , transmitted b y the m th an tenna on the n th tone and d n,m is the signal observ ed at the m th reeiv e an tenna on the n th tone. F or n = 0 , 1 , . . . , N − 1 , w e assume that c n on tains statistially indep enden t en tries and satises E [ c n ] = 0 and E [ c H n c n ] = 1 . Again for n = 0 , 1 , . . . , N − 1 , w e assume that w n is statistially indep enden t of c n and on tains en tries that are indep enden t and iden tially distributed (i.i.d.) as C N (0 , σ 2 w ) , where σ 2 w denotes the noise v ariane and is assumed to b e kno wn at the reeiv er. In pratie, N is t ypially hosen to b e a p o w er of t w o in order to allo w for eien t OFDM pro essing based on the F ast F ourier T ransform (FFT). Moreo v er, a small subset of the N tones is t ypially set aside for pilot sym b ols and virtual tones at the frequeny band edges, whi h help to redue out-of-band in terferene and relax the pulse-shaping lter requiremen ts. W e ollet the indies orresp onding to the D tones arrying pa yload data in to the set D ⊆ { 0 , 1 , . . . , N − 1 } . T ypial OFDM systems ha v e D ≥ 3 L CP . 3.2. QR De omp osition in MIMO-OFDM Dete tors Widely used algorithms for oheren t detetion in MIMO-OFDM systems inlude suessiv e anela- tion (SC) detetors [ 13 ℄, b oth zero-foring (ZF) and MMSE [21 , 8 ℄, and sphere deo ders, b oth in the original form ulation [5 , 17 ℄ requiring ZF-based prepro essing, as w ell as in the MMSE-based form prop osed in [ 16 ℄. These detetion algorithms require QR deomp osition in the prepro essing step, or, more sp eially , om- putation of matries Q ( s n ) and R ( s n ) , for all n ∈ D , dened as follo ws. In the ZF ase, Q ( s n ) and R ( s n ) are QR fators of H ( s n ) , whereas in the MMSE ase, Q ( s n ) and R ( s n ) are obtained as follo ws: ¯ Q ( s n ) R ( s n ) is the unique QR deomp osition of the full-rank, ( M R + M T ) × M T MMSE-augmente d hannel matrix ¯ H s n , H ( s n ) √ M T σ w I M T (9) and Q ( s n ) is giv en b y ¯ Q 1 ,M R ( s n ) . T aking the rst M R ro ws on b oth sides of the equation ¯ H ( s n ) = ¯ Q ( s n ) R ( s n ) yields the fatorization H ( s n ) = Q ( s n ) R ( s n ) , whi h is unique b eause of the uniqueness of ¯ Q ( s n ) and R ( s n ) , and whi h w e all the MMSE-QR de omp osition of H ( s n ) with the MMSE-QR fators Q ( s n ) and R ( s n ) . In the follo wing, w e briey desrib e ho w Q ( s n ) and R ( s n ) , either deriv ed as QR deomp osition or as MMSE-QR deomp osition of H ( s n ) , are used in the detetion algorithms listed ab o v e. SC detetors essen tially solv e the linear system of equations Q H ( s n ) d n = R ( s n ) ˆ c n b y ba k-substitution (with rounding of the in termediate results to elemen ts of O [13 ℄) to obtain ˆ c n ∈ O M T . Sphere deo ders exploit the upp er triangularit y of R ( s n ) to nd the sym b ol v etor ˆ c n ∈ O M T that minimizes k Q H ( s n ) d n − R ( s n ) ˆ c n k 2 through an eien t tree sear h [17 ℄. 8 3.3. Pr oblem Statement W e assume that the MIMO-OFDM reeiv er has p erfet kno wledge of the samples H ( s n ) for n ∈ E ⊆ { 0 , 1 , . . . , N − 1 } , with |E | ≥ L + 1 , from whi h H ( s n ) an b e obtained at an y data-arrying tone n ∈ D through in terp olation of H ( s ) ∼ (0 , L ) . W e note that in terp olation of H ( s ) is not neessary if D ⊆ E . W e next form ulate the problem statemen t b y fo using on ZF-based detetors, whi h require QR deomp osition of the MIMO-OFDM hannel matries H ( s n ) . The problem statemen t for the MMSE ase is analogous with QR deomp osition replaed b y MMSE-QR deomp osition. The MIMO-OFDM reeiv er needs to ompute QR fators Q ( s n ) and R ( s n ) of H ( s n ) for all data-arrying tones n ∈ D . A straigh tforw ard approa h to solving this problem onsists of rst in terp olating H ( s ) to ob- tain H ( s n ) at the tones n ∈ D and then p erforming QR deomp osition on a p er-tone basis. This metho d will heneforth b e alled brute-for e p er-tone QR de omp osition . The in terp olation-based QR deomp osition algorithms presen ted in this pap er are motiv ated b y the follo wing observ ations. First, p erforming QR deom- p osition on an M × M matrix requires O ( M 3 ) arithmeti op erations [6℄, whereas the n um b er of arithmeti op erations in v olv ed in omputing one sample of an M × M LP matrix b y in terp olation is prop ortional to the n um b er of matrix en tries M 2 , as in terp olation of an LP matrix is p erformed en trywise. This omparison suggests that w e ma y obtain fundamen tal sa vings in omputational omplexit y b y replaing QR deomp o- sition b y in terp olation. Seond, onsider a at-fading hannel, so that L = 0 and hene H ( s n ) = H 0 for all n = 0 , 1 , . . . , N − 1 . In this ase, a single QR deomp osition H 0 = QR yields QR fators of H ( s n ) for all data-arrying tones n ∈ D . A question that no w arises naturally is whether for L > 0 QR fators Q ( s n ) and R ( s n ) , n ∈ D , an b e obtained from a smaller set of QR fators through in terp olation. W e will see that the answ er is in the armativ e and will, moreo v er, demonstrate that in terp olation-based QR deomp osition algorithms an yield signian t omputational omplexit y sa vings o v er brute-fore p er-tone QR deomp o- sition for a wide range of v alues of the parameters M T , M R , L , N , and D , whi h will b e referred to as the system p ar ameters throughout the pap er. The k ey to form ulating in terp olation-based algorithms and realizing these omplexit y sa vings is a result on QR deomp osition of LP matries formalized in Theorem 9 in the next setion. 4. QR Deomp osition through In terp olation 4.1. A dditional Pr op erties of QR De omp osition W e next set the stage for the form ulation of our main te hnial result b y presen ting additional prop erties of QR deomp osition of a matrix A ∈ C P × M , with P ≥ M , that are diretly implied b y Denition 1. Prop osition 5. L et A = QR b e a QR de omp osition of A . Then, for a given k ∈ { 1 , 2 , . . . , M } , A 1 ,k = Q 1 ,k R 1 ,k 1 ,k is a QR de omp osition of A 1 ,k . 9 Pr o of. F rom A = QR it follo ws that A 1 ,k = ( QR ) 1 ,k = Q 1 ,k R 1 ,k 1 ,k + Q k +1 ,M R k +1 ,M 1 ,k , whi h simplies to A 1 ,k = Q 1 ,k R 1 ,k 1 ,k , sine the upp er triangularit y of R implies R k +1 ,M 1 ,k = 0 . Q 1 ,k and R 1 ,k 1 ,k satisfy Conditions 1 and 2 of Denition 1 sine all olumns of Q 1 ,k are also olumns of Q and sine R 1 ,k 1 ,k is a prinipal submatrix of R , resp etiv ely . Finally , R = Q H A implies R 1 ,k 1 ,k = ( Q H A ) 1 ,k 1 ,k = Q H 1 ,k A 1 ,k and hene Condition 3 of Denition 1 is satised. Prop osition 6. L et A = QR b e a QR de omp osition of A . Then, for M > 1 and for a given k ∈ { 2 , 3 , . . . , M } , A k,M − Q 1 ,k − 1 R 1 ,k − 1 k,M = Q k,M R k,M k,M is a QR de omp osition of A k,M − Q 1 ,k − 1 R 1 ,k − 1 k,M . Pr o of. A = Q 1 ,k − 1 R 1 ,k − 1 + Q k,M R k,M implies A k,M = Q 1 ,k − 1 R 1 ,k − 1 k,M + Q k,M R k,M k,M and hene A k,M − Q 1 ,k − 1 R 1 ,k − 1 k,M = Q k,M R k,M k,M . Q k,M and R k,M k,M satisfy Conditions 1 and 2 of Denition 1 sine all olumns of Q k,M are also olumns of Q and sine R k,M k,M is a prinipal submatrix of R , resp etiv ely . Moreo v er, R = Q H A implies R k,M k,M = ( Q H A ) k,M k,M = Q H k,M A k,M . Using Q H k,M Q 1 ,k − 1 = 0 , whi h follo ws from the fat that the nonzero olumns of Q are orthonormal, w e an write R k,M k,M = Q H k,M A k,M − Q H k,M Q 1 ,k − 1 R 1 ,k − 1 k,M = Q H k,M ( A k,M − Q 1 ,k − 1 R 1 ,k − 1 k,M ) . Hene, Condition 3 of Denition 1 is satised. In order to haraterize QR deomp osition of A in the general ase rank( A ) ≤ M , w e in tro due the follo wing onept. Denition 7. The or der e d olumn r ank of A is the n um b er K , 0 , rank( A 1 , 1 ) = 0 max { k ∈ { 1 , 2 , . . . , M } : ra nk( A 1 ,k ) = k } , else. F or later use, w e note that K = 0 is equiv alen t to a 1 = 0 , and that K < M is equiv alen t to A b eing rank-deien t. Prop osition 8. QR fators Q and R of a matrix A of or der e d olumn r ank K > 0 satisfy the fol lowing pr op erties: 1. Q H 1 ,K Q 1 ,K = I K 2. [ R ] k,k > 0 for k = 1 , 2 , . . . , K 3. Q 1 ,K and R 1 ,K ar e unique 4. ran( Q 1 ,k ) = ran( A 1 ,k ) for k = 1 , 2 , . . . , K 5. if K < M , [ R ] K +1 ,K +1 = 0 Pr o of. Sine Q 1 ,K and R 1 ,K 1 ,K are QR fators of A 1 ,K , as stated in Prop osition 5, and sine rank( A 1 ,K ) = K , Prop erties 1 and 2, as w ell as the uniqueness of Q 1 ,K stated in Prop ert y 3 , are obtained diretly b y applying Prop osition 2 to the full-rank matrix A 1 ,K . The uniqueness of R 1 ,K stated in Prop ert y 3 is implied b y the uniqueness of Q 1 ,K and b y R 1 ,K = Q H 1 ,K A , whi h follo ws from Condition 3 of Denition 1. F or 10 k = 1 , 2 , . . . , K , ran( Q 1 ,k ) = ran( A 1 ,k ) is a trivial onsequene of A 1 ,k = Q 1 ,k R 1 ,k 1 ,k and of rank( R 1 ,k 1 ,k ) = k , whi h follo ws from the fat that R 1 ,k 1 ,k is upp er triangular with nonzero en tries on its main diagonal. This pro v es Prop ert y 4 . If K < M , Condition 3 of Denition 1 implies [ R ] K +1 ,K +1 = q H K +1 a K +1 . If q K +1 = 0 , [ R ] K +1 ,K +1 = 0 follo ws trivially . If q K +1 6 = 0 , Condition 1 of Denition 1 implies that q K +1 is orthogonal to ran( Q 1 ,K ) , whereas the denition of K implies that a K +1 ∈ ran( A 1 ,K ) . Sine ran( Q 1 ,K ) = ra n( A 1 ,K ) , w e obtain q H K +1 a K +1 = [ R ] K +1 ,K +1 = 0 , whi h pro v es Prop ert y 5 . W e emphasize that for K > 0 , the uniqueness of Q 1 ,K and R 1 ,K has t w o signian t onsequenes. First, the GS orthonormalization pro edure (1)(3 ), ev aluated for k = 1 , 2 , . . . , K , determines the submatries Q 1 ,K and R 1 ,K of the matries Q and R pro dued b y any QR deomp osition algorithm. Seond, the non uniqueness of Q and R in the ase of rank-deien t A , demonstrated in Setion 2.2 , is restrited to the submatries Q K +1 ,M and R K +1 ,M . Finally , w e note that Prop ert y 5 of Prop osition 8 is v alid for the ase K = 0 as w ell. In fat, Condition 3 of Denition 1 implies [ R ] 1 , 1 = q H 1 a 1 . Sine K = 0 implies a 1 = 0 , w e immediately obtain [ R ] 1 , 1 = 0 . 4.2. QR De omp osition of an LP Matrix In the remainder of Setion 4 , w e onsider a P × M LP matrix A ( s ) ∼ ( V 1 , V 2 ) , s ∈ U , with P ≥ M , and QR fators Q ( s ) and R ( s ) of A ( s ) . Despite A ( s ) b eing an LP matrix, Q ( s ) and R ( s ) will, in general, not b e LP matries. T o see this, onsider the ase where rank( A ( s )) = M for all s ∈ U . It follo ws from the results in Setions 2.2 and 4.1 that, in this ase, Q ( s ) and R ( s ) are unique and determined through ( 1)(3). The division and the square ro ot op eration in ( 2), in general, prev en t Q ( s ) , and hene also R ( s ) = Q H ( s ) A ( s ) , from b eing LP matries. Nev ertheless, in this setion w e will sho w that there exists a mapping M that transforms Q ( s ) and R ( s ) in to orresp onding LP matries ˜ Q ( s ) and ˜ R ( s ) . The mapping M onstitutes the basis for the form ulation of in terp olation-based QR deomp osition algorithms for MIMO-OFDM systems. In the follo wing, w e onsider QR fators of A ( s 0 ) for a giv en s 0 ∈ U . In order to k eep the notation ompat, w e omit the dep endene of all in v olv ed quan tities on s 0 . W e start b y dening the auxiliary v ariables ∆ k as ∆ k , ∆ k − 1 [ R ] 2 k,k , k = 1 , 2 , . . . , M (10) with ∆ 0 , 1 . Next, w e in tro due the v etors ˜ q k , ∆ k − 1 [ R ] k,k q k , k = 1 , 2 , . . . , M (11) ˜ r T k , ∆ k − 1 [ R ] k,k r T k , k = 1 , 2 , . . . , M (12) and dene the mapping M : ( Q , R ) 7→ ( ˜ Q , ˜ R ) b y ˜ Q , [ ˜ q 1 ˜ q 2 · · · ˜ q M ] and ˜ R , [ ˜ r 1 ˜ r 2 · · · ˜ r M ] T . No w, w e onsider the ordered olumn rank K of A , and note that Prop ert y 2 in Prop osition 8 implies that, if K > 0 , ∆ k − 1 [ R ] k,k > 0 for k = 1 , 2 , . . . , K , as seen b y unfolding the reursion in ( 10 ). Hene, for 11 K > 0 and k = 1 , 2 , . . . , K , w e an ompute q k and r T k from ˜ q k and ˜ r T k , resp etiv ely , aording to q k = (∆ k − 1 [ R ] k,k ) − 1 ˜ q k (13) r T k = (∆ k − 1 [ R ] k,k ) − 1 ˜ r T k (14) where ∆ k − 1 [ R ] k,k is obtained from the en tries on the main diagonal of ˜ R as ∆ k − 1 [ R ] k,k = q [ ˜ R ] k,k , k = 1 q [ ˜ R ] k − 1 ,k − 1 [ ˜ R ] k,k , k = 2 , 3 , . . . , K . (15) If K = M , i.e., for full-rank A , w e ha v e ∆ k − 1 [ R ] k,k 6 = 0 for all k = 1 , 2 , . . . , M , and the mapping M is in v ertible. In the ase K < M , Prop ert y 5 in Prop osition 8 states that [ R ] K +1 ,K +1 = 0 , whi h om bined with (10 )(12 ) implies that ∆ k = 0 , ˜ q k = 0 , and ˜ r T k = 0 for k = K + 1 , K + 2 , . . . , M . Hene, the mapping M is not in v ertible for K < M , sine the information on tained in Q K +1 ,M and R K +1 ,M an not b e extrated from ˜ Q K +1 ,M = 0 and ˜ R K +1 ,M = 0 . Nev ertheless, w e an reo v er Q K +1 ,M and R K +1 ,M as follo ws. F or 0 < K < M , setting k = K + 1 in Prop osition 6 sho ws that Q K +1 ,M and R K +1 ,M K +1 ,M an b e obtained b y QR deomp osition of A K +1 ,M − Q 1 ,K R 1 ,K K +1 ,M . Then, R K +1 ,M is obtained as R K +1 ,M = [ R K +1 ,M 1 ,K R K +1 ,M K +1 ,M ] with R K +1 ,M 1 ,K = 0 b eause of the upp er triangularit y of R . F or K = 0 , sine ˜ Q and ˜ R are all-zero matries, Q K +1 ,M = Q and R K +1 ,M K +1 ,M = R m ust b e obtained b y p erforming QR deomp osition on A . In the remainder of the pap er, w e denote b y inverse mapping M − 1 : ( ˜ Q , ˜ R ) 7→ ( Q , R ) the pro edure 1 form ulated in the follo wing steps: 1. If K > 0 , for k = 1 , 2 , . . . , K , ompute the saling fator (∆ k − 1 [ R ] k,k ) − 1 using (15) and sale ˜ q k and ˜ r T k aording to (13 ) and (14 ), resp etiv ely . 2. If 0 < K < M , ompute Q K +1 ,M and R K +1 ,M K +1 ,M b y p erforming QR deomp osition on A K +1 ,M − Q 1 ,K R 1 ,K K +1 ,M , and onstrut R K +1 ,M = [ 0 R K +1 ,M K +1 ,M ] . 3. If K = 0 , ompute Q and R b y p erforming QR deomp osition on A . W e note that the non uniqueness of QR deomp osition in the ase K < M has the follo wing onsequene. Giv en QR fators Q 1 and R 1 of A , the appliation of the mapping M to ( Q 1 , R 1 ) follo w ed b y appliation of the in v erse mapping M − 1 yields matries Q 2 and R 2 that ma y not b e equal to Q 1 and R 1 , resp etiv ely . Ho w ev er, Q 2 and R 2 are QR fators of A in the sense of Denition 1 . W e are no w ready to presen t the main te hnial result of this pap er. This result pa v es the w a y for the form ulation of in terp olation-based QR deomp osition algorithms. Theorem 9. Given A : U → C P × M with P ≥ M , suh that A ( s ) ∼ ( V 1 , V 2 ) with maximum de gr e e V = V 1 + V 2 . The funtions ∆ k ( s ) , ˜ q k ( s ) , and ˜ r T k ( s ) , obtaine d by applying the mapping M as in (10 )(12 ) to QR fators Q ( s ) and R ( s ) of A ( s ) for al l s ∈ U , satisfy the fol lowing pr op erties: 1 Note that for K < M , the in v erse mapping M − 1 requires expliit kno wledge of A K +1 ,M . 12 1. ∆ k ( s ) ∼ ( k V , k V ) 2. ˜ q k ( s ) ∼ (( k − 1) V + V 1 , ( k − 1) V + V 2 ) 3. ˜ r T k ( s ) ∼ ( kV , k V ) . W e emphasize that Theorem 9 applies to an y QR fators satisfying Denition 1 and is therefore not aeted b y the non uniqueness of QR deomp osition arising in the rank-deien t ase. Before pro eeding to the pro of, w e note that Theorem 9 implies that the maxim um degrees of the LP matries ˜ Q ( s ) and ˜ R ( s ) are (2 M − 1) V and 2 M V , resp etiv ely . W e an therefore onlude that 2 M V + 1 base p oin ts are enough for in terp olation of b oth ˜ Q ( s ) and ˜ R ( s ) . W e men tion that the results presen ted in [4℄, in the on text of narro wband MIMO systems, in v olving a QR deomp osition algorithm that a v oids divisions and square ro ot op erations, an b e applied to the problem at hand as w ell. This leads to an alternativ e mapping of Q ( s ) and R ( s ) to LP matries with maxim um degrees signian tly higher than 2 M V . 4.3. Pr o of of The or em 9 The pro of onsists of three steps, summarized as follo ws. In Step 1, w e fo us on a giv en s 0 ∈ U and aim at writing ∆ k ( s 0 ) , ˜ q k ( s 0 ) , and ˜ r T k ( s 0 ) as funtions of A ( s 0 ) for all ( K ( s 0 ) , k ) ∈ K , { 0 , 1 , . . . , M } × { 1 , 2 , . . . , M } , where K ( s 0 ) denotes the ordered olumn rank of A ( s 0 ) . Step 1 is split in to Steps 1a and 1b, in whi h the t w o disjoin t subsets K 1 , { ( K ′ , k ′ ) ∈ K : 0 < K ′ ≤ M , 1 ≤ k ′ ≤ K ′ } and K 2 , { ( K ′ , k ′ ) ∈ K : 0 ≤ K ′ < M , K ′ + 1 ≤ k ′ ≤ M } (with K 1 ∪ K 2 = K ) are onsidered, resp etiv ely . In Step 1a, w e note that for ( K ( s 0 ) , k ) ∈ K 1 , Q 1 ,K ( s 0 ) ( s 0 ) and R 1 ,K ( s 0 ) ( s 0 ) are unique and an b e obtained b y ev aluating (1)(3) for k = 1 , 2 , . . . , K ( s 0 ) . By unfolding the reursions in ( 1)(3 ) and in (10 )(12 ), w e write ∆ k ( s 0 ) , ˜ q k ( s 0 ) , and ˜ r T k ( s 0 ) as funtions of A ( s 0 ) for ( K ( s 0 ) , k ) ∈ K 1 . In Step 1b, w e sho w that the expressions for ∆ k ( s 0 ) , ˜ q k ( s 0 ) , and ˜ r T k ( s 0 ) , deriv ed in Step 1a for ( K ( s 0 ) , k ) ∈ K 1 , are also v alid for ( K ( s 0 ) , k ) ∈ K 2 and hene, as a onsequene of K 1 ∪ K 2 = K , for all ( K ( s 0 ) , k ) ∈ K . In Step 2, w e note that the deriv ations in Step 1 arry o v er to all s 0 ∈ U , and generalize the expressions obtained in Step 1 to expressions for ∆ k ( s ) , ˜ q k ( s ) , and ˜ r T k ( s ) that hold for k = 1 , 2 , . . . , M and for all s ∈ U . Making use of A ( s ) ∼ ( V 1 , V 2 ) , in Step 3 it is nally sho wn that ∆ k ( s ) , ˜ q k ( s ) , and ˜ r T k ( s ) satisfy Prop erties 13 in the statemen t of Theorem 9. Step 1a. Throughout Steps 1a and 1b, in order to simplify the notation, w e drop the dep endene of all quan tities on s 0 . In Step 1a, w e assume that ( K, k ) ∈ K 1 and, unless stated otherwise, all equations and statemen ts in v olving k are v alid for all k = 1 , 2 , . . . , K . W e start b y listing preparatory results. W e reall from Setion 4.1 that the submatries Q 1 ,K and R 1 ,K are unique and that, onsequen tly , q k and r T k are determined b y (1)(3). F rom q k 6 = 0 , implied b y Prop ert y 1 in Prop osition 8, and from (2) w e dedue that y k 6 = 0 . Then, from (1) and (2) w e obtain y H k y k = y H k a k − k − 1 X i =1 q H i a k q y H k y k q H k q i = y H k a k (16) 13 as q H k q i = 0 for i = 1 , 2 , . . . , k − 1 . Consequen tly , w e an write [ R ] k,k , using (2 ) and (3), as [ R ] k,k = q H k a k = y H k a k q y H k y k = q y H k y k (17) th us implying [ R ] k,k q k = y k and hene, b y (11 ), ˜ q k = ∆ k − 1 y k . (18) F urthermore, using (10) and (17 ), w e an write ∆ k = ∆ k − 1 y H k y k or alternativ ely , in reursion-free form, ∆ k = k Y i =1 y H i y i . (19) Next, w e note that ( 1) implies y k = a k + k − 1 X i =1 α ( k ) i a i (20) with unique o eien ts α ( k ) i , i = 1 , 2 , . . . , k − 1 , sine y 1 = a 1 and sine for k > 1 , w e ha v e rank( A 1 ,k − 1 ) = k − 1 and, as stated in Prop ert y 4 of Prop osition 8 , ran( Q 1 ,k − 1 ) = ran( A 1 ,k − 1 ) . Next, w e onsider the relation b et w een { a 1 , a 2 , . . . , a k } and { y 1 , y 2 , . . . , y k } . Inserting (2) in to (1) yields y k = a k − k − 1 X i =1 y H i a k y H i y i y i . Hene, using ( 16 ), w e obtain a k ′ = y k ′ + k ′ − 1 X i =1 y H i a k ′ y H i y i y i = k ′ X i =1 y H i a k ′ y H i y i y i , k ′ = 1 , 2 , . . . , k . (21) W e next note that (21 ) an b e rewritten, for k ′ = 1 , 2 , . . . , k , in v etor-matrix form as a 1 a 2 · · · a k = y 1 y 2 · · · y k V k (22) with the k × k matrix V k , y H 1 a 1 y H 1 y 1 y H 1 a 2 y H 1 y 1 · · · y H 1 a k y H 1 y 1 0 y H 2 a 2 y H 2 y 2 · · · y H 2 a k y H 2 y 2 . . . . . . . . . . . . 0 0 · · · y H k a k y H k y k 14 satisfying det( V k ) = 1 b eause of y k 6 = 0 and of (16 ). Next, w e an write V k as V k = D − 1 k U k with the k × k nonsingular matries D k , diag ( y H 1 y 1 , y H 2 y 2 , . . . , y H k y k ) and U k , y H 1 a 1 y H 1 a 2 · · · y H 1 a k 0 y H 2 a 2 · · · y H 2 a k . . . . . . . . . . . . 0 0 · · · y H k a k . (23) W e next express ∆ k as a funtion of A 1 ,k . F rom (16 ), (19), and (23 ), w e obtain ∆ k = k Y i =1 y H i a i = det( U k ) . (24) F urthermore, (2), (3), and (17 ) imply y H k ′ a i = q y H k ′ y k ′ q H k ′ a i = [ R ] k ′ ,k ′ [ R ] k ′ ,i whi h ev aluates to zero for 1 ≤ i < k ′ ≤ k b eause of the upp er triangularit y of R . Hene, U k an b e written as U k = y H 1 a 1 y H 1 a 2 · · · y H 1 a k y H 2 a 1 y H 2 a 2 · · · y H 2 a k . . . . . . . . . . . . y H k a 1 y H k a 2 · · · y H k a k . (25) By om bining (24 ) and (25), w e obtain ∆ k = det( U k ) = det y H 1 A 1 ,k y H 2 A 1 ,k . . . y H k A 1 ,k = det a H 1 A 1 ,k a H 2 A 1 ,k . . . a H k A 1 ,k (26) = det A H 1 ,k A 1 ,k (27) where the third equalit y in (26 ) an b e sho wn b y indution as follo ws. W e start b y noting that y 1 = a 1 , whi h implies that in the rst ro w of U k , y 1 an b e replaed b y a 1 . F or k ′ > 1 , assuming that w e ha v e already replaed y 1 , y 2 , . . . , y k ′ − 1 b y a 1 , a 2 , . . . , a k ′ − 1 , resp etiv ely , w e an replae y k ′ b y a k ′ sine, as a onsequene of (20 ), the k ′ th ro w of U k an b e written as y H k ′ A 1 ,k = a H k ′ A 1 ,k + k ′ − 1 X i =1 α ( k ′ ) i ∗ a H i A 1 ,k . Hene, replaing y H k ′ A 1 ,k b y a H k ′ A 1 ,k amoun ts to subtrating a linear om bination of the rst k ′ − 1 ro ws of U k from the k ′ th ro w of U k . This op eration do es not aet the v alue of det( U k ) [9 ℄. 15 Similarly to what w e ha v e done for ∆ k , w e will next sho w that ˜ q k an b e expressed in terms of A 1 ,k only . W e start b y noting that, sine V k is nonsingular, w e an rewrite (22 ) as y 1 y 2 · · · y k = a 1 a 2 · · · a k V − 1 k . (28) Next, from V k = D − 1 k U k w e obtain that V − 1 k = U − 1 k D k = adj( U k ) det( U k ) D k and hene, b y (24 ), that V − 1 k = 1 ∆ k Γ ( k ) 1 , 1 Γ ( k ) 2 , 1 · · · Γ ( k ) k, 1 0 Γ ( k ) 2 , 2 · · · Γ ( k ) k, 2 . . . . . . . . . . . . 0 0 · · · Γ ( k ) k,k | {z } adj( U k ) D k (29) where adj( U k ) is upp er triangular sine U k is upp er triangular, and Γ ( k ) n,m denotes the ofator of U k relativ e to the matrix en try [ U k ] n,m ( n = 1 , 2 , . . . , k ; m = n, n + 1 , . . . , k ) [ 9℄. Note that in order to handle the ase k = 1 orretly , for whi h adj( U 1 ) = Γ (1) 1 , 1 , det( U 1 ) = U 1 = ∆ 1 , and U − 1 1 = 1 / ∆ 1 , w e dene Γ (1) 1 , 1 , 1 . F rom (28 ) and (29) it follo ws that y k = 1 ∆ k y H k y k k X i =1 Γ ( k ) k,i a i = 1 ∆ k − 1 k X i =1 Γ ( k ) k,i a i and therefore, b y (18 ), w e get ˜ q k = k X i =1 Γ ( k ) k,i a i (30) whi h ev aluates to ˜ q 1 = a 1 for k = 1 . Next, for k > 1 w e denote b y A 1 ,k \ i the matrix obtained b y remo ving the i th olumn of A 1 ,k , and w e express Γ ( k ) k,i as a funtion of a 1 , a 2 , . . . , a k aording to Γ ( k ) k,i = ( − 1 ) k + i det y H 1 A 1 ,k \ i y H 2 A 1 ,k \ i . . . y H k − 1 A 1 ,k \ i = ( − 1 ) k + i det A H 1 ,k − 1 A 1 ,k \ i where the last equalit y is deriv ed analogously to (26) and (27 ). Th us, (30 ) an b e written as ˜ q k = a k , k = 1 P k i =1 ( − 1) k + i det( A H 1 ,k − 1 A 1 ,k \ i ) a i , k > 1 . (31) 16 Finally , w e obtain ˜ r T k = ˜ q H k A (32) as implied b y (3), (11), and (12). The results of Step 1a are the relations ( 27), (31 ), and (32 ), whi h are v alid for ( K, k ) ∈ K 1 . Step 1b. W e next sho w that ( 27 ), (31 ), and (32) hold for ( K, k ) ∈ K 2 as w ell. Throughout Step 1b w e assume that ( K, k ) ∈ K 2 , and, unless sp eied otherwise, all equations and statemen ts in v olving k are v alid for k = K + 1 , K + 2 , . . . , M . W e kno w from Setion 4.1 that [ R ] K +1 ,K +1 = 0 . A ording to the denition of M , [ R ] K +1 ,K +1 = 0 implies ∆ k = 0 , ˜ q k = 0 , and ˜ r T k = 0 . It is therefore to b e sho wn that the RHS of (27 ) ev aluates to zero, and that the RHS expressions of ( 31 ) and (32 ) ev aluate to all-zero v etors. W e start b y noting that sine k > K , A 1 ,k is rank-deien t. Sine rank( A H 1 ,k A 1 ,k ) = rank( A 1 ,k ) < k , w e obtain that det( A H 1 ,k A 1 ,k ) on the RHS of (27 ) ev aluates to zero. Next, for k > max( K , 1) , the expression k X i =1 ( − 1) k + i det A H 1 ,k − 1 A 1 ,k \ i a i (33) on the RHS of (31) is a v etor whose p th omp onen t an b e written, b y in v erse Laplae expansion [9 ℄, as k X i =1 ( − 1) k + i det A H 1 ,k − 1 A 1 ,k \ i [ A ] p,i = det A H 1 ,k − 1 a 1 A H 1 ,k − 1 a 2 · · · A H 1 ,k − 1 a k [ A ] p, 1 [ A ] p, 2 · · · [ A ] p,k (34) for all p = 1 , 2 , . . . , P . No w, again for k > max( K , 1 ) , sine A 1 ,k is rank-deien t, a k an b e written as a linear om bination a k = k − 1 X k ′ =1 β ( k ′ ) a k ′ (for some o eien ts β ( k ′ ) , k ′ = 1 , 2 , . . . , k − 1 ) whi h implies that, for all p = 1 , 2 , . . . , P , the argumen t of the determinan t on the RHS of ( 34 ) has A H 1 ,k − 1 a k [ A ] p,k = k − 1 X k ′ =1 β ( k ′ ) A H 1 ,k − 1 a k ′ [ A ] p,k ′ as its last olumn. Sine this olumn is a linear om bination of the rst k − 1 olumns, the determinan t on the RHS of (34) is equal to zero for all p = 1 , 2 , . . . , P , and hene the expression in ( 33) is equal to an all-zero v etor for k > max( K, 1) . Moreo v er, if K = 0 and k = 1 , w e ha v e a 1 = 0 on the RHS of (31). Hene, the RHS of (31 ) ev aluates to an all-zero v etor for all ( K, k ) ∈ K 2 . Th us, (31 ) simplies to ˜ q k = 0 , whi h in turn implies that the RHS of ( 32 ) ev aluates to an all-zero v etor as w ell. W e ha v e therefore sho wn that (27 ), (31 ), and (32 ) hold for ( K, k ) ∈ K 2 . Finally , sine K 1 ∪ K 2 = K , the results of Steps 1a and 1b imply that (27), (31 ), and (32) are v alid for ( K, k ) ∈ K . 17 Step 2. W e note that the deriv ations presen ted in Steps 1a and 1b for a giv en s 0 ∈ U do not dep end on s 0 and an hene b e arried o v er to all s 0 ∈ U . Th us, w e an rewrite (27 ), (31 ), and (32), resp etiv ely , as ∆ k ( s ) = det A H 1 ,k ( s ) A 1 ,k ( s ) (35) ˜ q k ( s ) = a k ( s ) , k = 1 P k i =1 ( − 1) k + i det( A H 1 ,k − 1 ( s ) A 1 ,k \ i ( s )) a i ( s ) , k > 1 (36) ˜ r T k ( s ) = ˜ q H k ( s ) A ( s ) (37) for k = 1 , 2 , . . . , M and s ∈ U . Step 3. F or k = 1 , 2 , . . . , M , w e note that A ( s ) ∼ ( V 1 , V 2 ) , along with V = V 1 + V 2 , implies A H 1 ,k ( s ) A 1 ,k ( s ) ∼ ( V , V ) . No w, the determinan t on the RHS of (35 ) an b e expressed through Laplae expansion as a sum of pro duts of k en tries of A H 1 ,k ( s ) A 1 ,k ( s ) ∼ ( V , V ) . Therefore, w e get ∆ k ( s ) ∼ ( kV , k V ) for k = 1 , 2 , . . . , M . Analogously , for k = 2 , 3 , . . . , M w e obtain det( A H 1 ,k − 1 ( s ) A 1 ,k \ i ( s )) ∼ (( k − 1) V , ( k − 1) V ) . The lat- ter result, om bined with A ( s ) ∼ ( V 1 , V 2 ) in (36 ) yields ˜ q k ( s ) ∼ (( k − 1) V + V 1 , ( k − 1 ) V + V 2 ) , whi h holds for k = 1 as w ell as a trivial onsequene of (36) and A ( s ) ∼ ( V 1 , V 2 ) . Finally , from ˜ q k ( s ) ∼ (( k − 1) V + V 1 , ( k − 1) V + V 2 ) and (37 ), using A ( s ) ∼ ( V 1 , V 2 ) and V = V 1 + V 2 , w e obtain ˜ r T k ( s ) ∼ ( kV , k V ) for k = 1 , 2 , . . . , M . 5. Appliation to MIMO-OFDM W e are no w ready to sho w ho w the results deriv ed in the previous setion lead to algorithms that exploit the p olynomial nature of the MIMO hannel transfer funtion H ( s ) ∼ (0 , L ) to p erform eien t in terp olation-based omputation of QR fators of H ( s n ) , for all n ∈ D , giv en kno wledge of H ( s n ) for n ∈ E . W e note that the algorithms desrib ed in the follo wing apply to QR deomp osition of generi p olynomial matries that are o v ersampled on the unit irle. Within the algorithms to b e presen ted, in terp olation in v olv es base p oin ts and target p oin ts on U that orresp ond to OFDM tones indexed b y in tegers tak en from the set { 0 , 1 , . . . , N − 1 } . F or a giv en set X ⊆ { 0 , 1 , . . . , N − 1 } of OFDM tones, w e dene S ( X ) , { s n : n ∈ X } to denote the set of orresp onding p oin ts on U . With this denition in plae, w e start b y summarizing the brute-fore approa h desrib ed in Setion 3.3 . A lgorithm I: Brute-for e p er-tone QR de omp osition 1. In terp olate H ( s ) from S ( E ) to S ( D ) . 2. F or ea h n ∈ D , p erform QR deomp osition on H ( s n ) to obtain Q ( s n ) and R ( s n ) . It is ob vious that for large D , p erforming QR deomp osition on a p er-tone basis will result in high omputational omplexit y . Ho w ev er, in the pratially relev an t ase L ≪ D the OFDM system eetiv ely 18 highly o v ersamples the MIMO hannel's transfer funtion, so that H ( s n ) hanges slo wly aross n . This observ ation, om bined with the results in Setion 4, onstitutes the basis for a new lass of algorithms that p erform QR deomp osition at a small n um b er of tones and obtain the remaining QR fators through in terp olation. More sp eially , the basi idea of in terp olation-based QR deomp osition is as follo ws. By applying Theorem 9 to the M R × M T LP matrix H ( s ) ∼ (0 , L ) , w e obtain ˜ q k ( s ) ∼ (( k − 1) L, k L ) and ˜ r T k ( s ) ∼ ( k L, k L ) for k = 1 , 2 , . . . , M T . In order to simplify the exp osition, in the remainder of the pap er w e onsider ˜ q k ( s ) as satisfying ˜ q k ( s ) ∼ ( k L, k L ) . The resulting statemen ts ˜ q k ( s ) , ˜ r T k ( s ) ∼ ( kL , k L ) , k = 1 , 2 , . . . , M T (38) imply that b oth ˜ q k ( s ) and ˜ r T k ( s ) an b e in terp olated from at least 2 k L + 1 base p oin ts, and that, as a on- sequene of V 1 = V 2 = k L , the orresp onding in terp olation matries are real-v alued. F or k = 1 , 2 , . . . , M T , the in terp olation-based algorithms to b e presen ted ompute ˜ q k ( s n ) and ˜ r T k ( s n ) , through QR deomp osition follo w ed b y appliation of the mapping M , at a subset of OFDM tones of ardinalit y at least 2 k L + 1 , then in terp olate ˜ q k ( s ) and ˜ r T k ( s ) to obtain ˜ q k ( s n ) and ˜ r T k ( s n ) at the remaining tones, and nally apply the in v erse mapping M − 1 at these tones. In the follo wing, the sets I k ⊆ { 0 , 1 , . . . , N − 1 } , with I k − 1 ⊆ I k and B k , |I k | ≥ 2 k L + 1 ( k = 1 , 2 , . . . , M T ), on tain the indies orresp onding to the OFDM tones hosen as base p oin ts. F or ompleteness, w e dene I 0 , ∅ . Sp ei hoies of the sets I k will b e disussed in detail in Setion 8. W e start with a oneptually simple algorithm for in terp olation-based QR deomp osition, deriv ed from the observ ation that the M T statemen ts in (38 ) an b e unied in to the single statemen t ˜ Q ( s ) , ˜ R ( s ) ∼ ( M T L, M T L ) . This implies that w e an in terp olate ˜ Q ( s ) and ˜ R ( s ) from a single set of base p oin ts of ardinalit y B M T . The orresp onding algorithm an b e form ulated as follo ws: A lgorithm II: Single interp olation step 1. In terp olate H ( s ) from S ( E ) to S ( I M T ) . 2. F or ea h n ∈ I M T , p erform QR deomp osition on H ( s n ) to obtain Q ( s n ) and R ( s n ) . 3. F or ea h n ∈ I M T , apply M : ( Q ( s n ) , R ( s n )) 7→ ( ˜ Q ( s n ) , ˜ R ( s n )) . 4. In terp olate ˜ Q ( s ) and ˜ R ( s ) from S ( I M T ) to S ( D\I M T ) . 5. F or ea h n ∈ D \I M T , apply M − 1 : ( ˜ Q ( s n ) , ˜ R ( s n )) 7→ ( Q ( s n ) , R ( s n )) . This form ulation of Algorithm I I assumes that H ( s n ) has full rank for all n ∈ D\ I M T , whi h allo ws to p erform all in v erse mappings M − 1 in Step 5 using (13 )(15) only . If, ho w ev er, for a giv en n ∈ D \I M T , H ( s n ) is rank-deien t with ordered olumn rank K < M T , w e ha v e ˜ Q K +1 ,M T ( s n ) = 0 and ˜ R K +1 ,M T ( s n ) = 0 . Hene, aording to the results in Setion 4.2 , Q K +1 ,M T ( s n ) and R K +1 ,M T ( s n ) m ust b e omputed through QR deomp osition of H K +1 ,M T ( s n ) − Q 1 ,K ( s n ) R 1 ,K K +1 ,M T ( s n ) for K > 0 or of H ( s n ) for K = 0 . This, in turn, requires H K +1 ,M T ( s n ) to b e obtained b y in terp olating H K +1 ,M T ( s ) from S ( E ) to the single target 19 p oin t s n in an additional step. F or simpliit y of exp osition, in the remainder of the pap er w e will assume that H ( s n ) is full-rank for all n ∈ D . Departing from Algorithm I I, whi h in terp olates ˜ q k ( s ) and ˜ r T k ( s ) from B M T base p oin ts, w e next presen t a more sophistiated algorithm that in v olv es in terp olation of ˜ q k ( s ) and ˜ r T k ( s ) from B k ≤ B M T base p oin ts ( k = 1 , 2 , . . . , M T ), in agreemen t with (38 ). The resulting Algorithm I I I onsists of M T iterations. In the rst iteration, the tones n ∈ I 1 are onsidered. A t ea h of these tones, QR deomp osition is p erformed on H ( s n ) , resulting in Q ( s n ) and R ( s n ) , whi h are then mapp ed to ( ˜ Q ( s n ) , ˜ R ( s n )) b y applying M . Next, ˜ q 1 ( s ) and ˜ r T 1 ( s ) are in terp olated from the tones n ∈ I 1 to the remaining tones n ∈ D \I 1 . In the k th iteration ( k = 2 , 3 , . . . , M T ), the tones n ∈ I k \I k − 1 are onsidered. A t ea h of these tones, Q 1 ,k − 1 ( s n ) and R 1 ,k − 1 ( s n ) are obtained 2 b y applying M − 1 to ( ˜ Q 1 ,k − 1 ( s n ) , ˜ R 1 ,k − 1 ( s n )) , already kno wn from the previous iterations, whereas the submatries Q k,M T ( s n ) and R k,M T k,M T ( s n ) are obtained b y p erforming QR deomp osition on the matrix H k,M T ( s n ) − Q 1 ,k − 1 ( s n ) R 1 ,k − 1 k,M T ( s n ) , in aordane with Prop osition 6, and R k,M T ( s n ) is giv en, for k > 1 , b y [ 0 R k,M T k,M T ( s n ) ] . Next, the submatries ˜ Q k,M T ( s n ) and ˜ R k,M T ( s n ) are omputed b y applying M to ( Q k,M T ( s n ) , R k,M T ( s n )) . Sine the samples ˜ q k ( s n ) and ˜ r T k ( s n ) are no w kno wn at all tones n ∈ I k , ˜ q k ( s ) and ˜ r T k ( s ) an b e in terp olated from the tones n ∈ I k to the remaining tones n ∈ D\ I k , thereb y ompleting the k th iteration. After M T iterations, w e kno w ˜ Q ( s n ) and ˜ R ( s n ) at all tones n ∈ D , as w ell as Q ( s n ) and R ( s n ) at the tones n ∈ I M T . The last step onsists of applying M − 1 to ( ˜ Q ( s n ) , ˜ R ( s n )) to obtain Q ( s n ) and R ( s n ) at the remaining tones n ∈ D \I k . The algorithm is form ulated as follo ws: A lgorithm III: Multiple interp olation steps 1. Set k ← 1 . 2. In terp olate H k,M T ( s ) from S ( E ) to S ( I k \I k − 1 ) . 3. If k = 1 , go to Step 5. Otherwise, for ea h n ∈ I k \I k − 1 , apply M − 1 : ( ˜ Q 1 ,k − 1 ( s n ) , ˜ R 1 ,k − 1 ( s n )) 7→ ( Q 1 ,k − 1 ( s n ) , R 1 ,k − 1 ( s n )) . 4. F or ea h n ∈ I k \I k − 1 , o v erwrite H k,M T ( s n ) b y H k,M T ( s n ) − Q 1 ,k − 1 ( s n ) R 1 ,k − 1 k,M T ( s n ) . 5. F or ea h n ∈ I k \I k − 1 , p erform QR deomp osition on H k,M T ( s n ) to obtain Q k,M T ( s n ) and R k,M T k,M T ( s n ) , and, if k > 1 , onstrut R k,M T ( s n ) = [ 0 R k,M T k,M T ( s n ) ] . 6. F or ea h n ∈ I k \I k − 1 , apply M : ( Q k,M T ( s n ) , R k,M T ( s n )) 7→ ( ˜ Q k,M T ( s n ) , ˜ R k,M T ( s n )) . 7. In terp olate ˜ q k ( s ) and ˜ r T k ( s ) from S ( I k ) to S ( D\I k ) . 8. If k = M T , pro eed to the next step. Otherwise, set k ← k + 1 and go ba k to Step 2. 9. F or ea h n ∈ D \I M T , apply M − 1 : ( ˜ Q ( s n ) , ˜ R ( s n )) 7→ ( Q ( s n ) , R ( s n )) . In omparison with Algorithm I I, Algorithm I I I p erforms QR deomp ositions on inreasingly smaller matries. The orresp onding omputational omplexit y sa vings are, ho w ev er, traded against an inrease in 2 The mapping M and its in v erse M − 1 are dened on submatries of Q ( s n ) and R ( s n ) aording to (10 )(15 ). 20 in terp olation eort and the omputational o v erhead asso iated with Step 4, whi h will b e referred to as the r e dution step in what follo ws. Moreo v er, the omplexit y of applying M and M − 1 diers for the t w o algorithms. A detailed omplexit y analysis pro vided in the next setion will sho w that, dep ending on the system parameters, Algorithm I I I an exhibit smaller omplexit y than Algorithm I I. W e onlude this setion with some remarks on ordered SC MIMO-OFDM detetors [13 ℄, whi h essen- tially p erm ute the olumns of H ( s n ) to p erform SC detetion of the transmitted data sym b ols aording to a giv en sorting riterion (su h as, e.g., V-BLAST sorting [21 ℄ ) to obtain b etter detetion p erformane than in the unsorted ase. The p erm utation of the olumns of H ( s n ) an b e represen ted b y means of righ t-m ultipliation of H ( s n ) b y an M T × M T p erm utation matrix P ( s n ) . The matries sub jeted to QR deomp osition are then giv en b y H ( s n ) P ( s n ) , n ∈ D . If P ( s n ) is onstan t aross all OFDM tones, i.e., P ( s n ) = P 0 , n ∈ D , w e ha v e H ( s ) P 0 ∼ (0 , L ) and Algorithms II I I an b e applied to H ( s n ) P 0 . A MIMO-OFDM ordered SC detetor using Algorithm I I to ompute QR fators of H ( s ) P 0 , along with a strategy for ho osing P 0 , w as presen ted in [ 22 ℄. If P ( s n ) v aries aross n , the matries H ( s n ) P ( s n ) , n ∈ D , in general, an no longer b e seen as samples of a p olynomial matrix of maxim um degree L ≪ D , so that the in terp olation-based QR deomp osition algorithms presen ted ab o v e an not b e applied. 6. Complexit y Analysis W e are next in terested in assessing under whi h irumstanes the in terp olation-based Algorithms I I and I I I oer omputational omplexit y sa vings o v er the brute-fore approa h in Algorithm I. T o this end, w e prop ose a simple omputational omplexit y metri, represen tativ e of VLSI iruit omplexit y as quan tied b y the pro dut of hip area and pro essing dela y [10 ℄. W e note that other imp ortan t asp ets of VLSI design, inluding, e.g., w ordwidth requiremen ts, memory aess strategies, and datapath ar hiteture, are not aoun ted for in our analysis. Nev ertheless, the prop osed metri is indiativ e of the omplexit y of Algorithms II I I and allo ws to quan tify the impat of the system parameters on the p oten tial sa vings of in terp olation-based QR deomp osition o v er brute-fore p er-tone QR deomp osition. In the remainder of the pap er, unless expliitly sp eied otherwise, the term omplexity refers to om- putational omplexit y aording to the metri dened in Setion 6.1 b elo w. W e deriv e the omplexit y of individual omputational tasks (i.e., in terp olation, QR deomp osition, mapping M , in v erse mapping M − 1 , and redution step) in Setion 6.2 . Then, w e pro eed to omputing the total omplexit y of Algorithms II I I in Setion 6.3. Finally , in Setion 6.4 w e ompare the omplexit y results obtained in Setion 6.3 and w e deriv e onditions on the system parameters under whi h Algorithms I I and I I I exhibit lo w er omplexit y than Algorithm I. 21 6.1. Complexity Metri In the VLSI implemen tation of a giv en algorithm, a wide range of trade-os b et w een silion area A and pro essing dela y τ an, in general, b e realized [ 10 ℄. P arallel pro essing redues τ at the exp ense of a larger A , whereas resoure sharing redues A at the exp ense of a larger τ . Ho w ev er, the orresp onding iruit transformations t ypially do not aet the area-dela y pro dut Aτ signian tly . F or this reason, the area-dela y pro dut is onsidered a relev an t indiator of algorithm omplexit y [10 ℄. In the denition of the sp ei omplexit y metri that will b e used subsequen tly , w e only tak e in to aoun t the arithmeti op erations with a signian t impat on Aτ . More sp eially , w e divide the op erations underlying the algorithms under onsideration in to three lasses, namely i) m ultipliations, ii) divisions and square ro ots, and iii) additions and subtrations. Class iii) op erations will not b e oun ted as they t ypially ha v e a signian tly lo w er VLSI iruit omplexit y than Class i) and Class ii) op erations. In all algorithms presen ted in this pap er, the n um b er of Class i) op erations is signian tly larger than the n um b er of Class ii) op erations. 3 By assuming a VLSI ar hiteture where the Class ii) op erations are p erformed b y lo w-area high-dela y arithmetial units op erating in parallel to the m ultipliers p erforming the Class i) op erations, it follo ws that the Class i) op erations dominate the o v erall omplexit y and the Class ii) op erations an b e negleted. Within Class i), w e distinguish b et w een ful l multipli ations (i.e., m ultipliations of t w o v ariable op erands) and onstant multipli ations (i.e., m ultipliations of a v ariable op erand b y a onstan t op erand 4 ). W e dene the ost of a full m ultipliation as the unit of omputational omplexit y . W e do not distinguish b et w een real- v alued full m ultipliations and omplex-v alued full m ultipliations, as w e assume that b oth are p erformed b y m ultipliers designed to pro ess t w o v ariable omplex-v alued op erands. The fat, disussed in detail in Setion 8.1 , that a onstan t m ultipliation an b e implemen ted in VLSI at signian tly smaller ost than a full m ultipliation, will b e aoun ted for through a w eigh ting fator smaller than one. 6.2. Per-T one Complexity of Individual Computational T asks In order to simplify the notation, in the remainder of this setion w e drop the dep endene of all quan tities on s n . W e furthermore in tro due the auxiliary v ariable J k , M R k + M T k − ( k − 1) k 2 , k = 1 , 2 , . . . , M T 3 W e assume that division of an M -dimensional v etor a b y a salar α , su h as the divisions in ( 2 ), (13 ), or (14 ), is implemen ted b y rst omputing the single division β , 1 /α and then m ultiplying the M en tries of a b y β , at the ost of one Class ii) op eration and M Class i) op erations, resp etiv ely . 4 In the on text of the in terp olation-based algorithms onsidered in this pap er, all op erands that dep end on H ( s ) are assumed v ariable. The o eien ts of in terp olation lters, e.g., are treated as onstan t op erands. F or a detailed disussion on the dierene b et w een full m ultipliations and onstan t m ultipliations, w e refer to Setion 8.1. 22 whi h sp eies the maxim um total n um b er of nonzero en tries in Q 1 ,k and R 1 ,k , and hene also in ˜ Q 1 ,k and ˜ R 1 ,k , in aordane with the fat that R and ˜ R are upp er triangular. Interp olation. W e quan tify the omplexit y of in terp olating an LP to one target p oin t through an equiv alen t of c IP full m ultipliations. The dep endene of in terp olation omplexit y on the underlying VLSI implemen ta- tion and on the n um b er of base p oin ts is assumed to b e inorp orated in to c IP . Sp ei strategies for eien t in terp olation along with the orresp onding v alues of c IP are presen ted in Setion 8 . Sine in terp olation of an LP matrix is p erformed en trywise, the omplexit y of in terp olating H k,M T ( s ) to one target p oin t is giv en b y c k,M T IP , H = M R M T − k + 1 c IP , k = 1 , 2 , . . . , M T . Similarly , in terp olation of ˜ Q ( s ) and ˜ R ( s ) to one target p oin t has omplexit y c IP , ˜ Q ˜ R = J M T c IP and the omplexit y of in terp olating ˜ q k ( s ) and ˜ r T k ( s ) to one target p oin t is giv en b y c ( k ) IP , ˜ q ˜ r = M R + M T − k + 1 c IP , k = 1 , 2 , . . . , M T . QR de omp osition. In order to k eep our disussion indep enden t of the QR deomp osition metho d, w e denote the ost of p erforming QR deomp osition on an M R × k matrix b y c M R × k QR ( k = 1 , 2 , . . . , M T ). Sp ei expressions for c M R × k QR will only b e required in the n umerial omplexit y analysis in Setion 9. Mapping M . W e denote the o v erall ost of mapping ( Q k,M T , R k,M T ) to ( ˜ Q k,M T , ˜ R k,M T ) ( k = 1 , 2 , . . . , M T ) b y c k,M T M . In the ase k = 1 , appliation of the mapping M requires omputation of [ R ] 1 , 1 , [ R ] 2 1 , 1 , [ R ] 2 1 , 1 [ R ] 2 , 2 , [ R ] 2 1 , 1 [ R ] 2 2 , 2 , . . . , Q M T i =1 [ R ] 2 i,i , at the ost of 2 M T − 1 full m ultipliations. This step yields b oth the saling fators ∆ k ′ − 1 [ R ] k ′ ,k ′ , k ′ = 1 , 2 , . . . , M T , and the diagonal en tries of ˜ R . F rom (31) w e an dedue that the rst olumn of ˜ Q is equal to the rst olumn of H and is hene obtained at zero omplexit y . The remaining en tries of ˜ Q and the en tries of ˜ R ab o v e the main diagonal are obtained b y saling the orre- sp onding en tries of Q and R aording to (11 ) and (12), resp etiv ely , whi h requires J M T − M R − M T full m ultipliations. Hene, w e obtain c 1 ,M T M = J M T − M R + M T − 1 . Next, w e onsider the ase k > 1 , whi h only o urs in Step 3 of Algorithm I I I, where ∆ k − 1 = [ ˜ R ] k − 1 ,k − 1 is already a v ailable from the previous iteration whi h in v olv es in terp olation of ˜ r T k − 1 ( s ) . The applia- tion of the mapping M rst requires omputation of ∆ k − 1 [ R ] k,k , ∆ k − 1 [ R ] 2 k,k , ∆ k − 1 [ R ] 2 k,k [ R ] k +1 ,k +1 , . . . , ∆ k − 1 Q M T i = k [ R ] 2 i,i , at the ost of 2( M T − k + 1 ) full m ultipliations. Then, the en tries of Q k,M T and the en tries of R k,M T ab o v e the main diagonal of R are saled aording to ( 11 ) and (12 ), whi h requires J M T − J k − 1 − ( M T − k + 1 ) full m ultipliations. In summary , w e obtain c k,M T M = J M T − J k − 1 + M T − k + 1 , k = 2 , 3 , . . . , M T . 23 T able 1: T otal omplexit y asso iated with the individual omputational tasks Computational task Sym b ol a Algorithm I Algorithm I I Algorithm I I I In terp olation of H ( s ) c IP , H , A Dc 1 ,M T IP , H B M T c 1 ,M T IP , H B 1 c 1 ,M T IP , H + 2 L M T X k =2 c k,M T IP , H In terp olation of ˜ Q ( s ) and ˜ R ( s ) c IP , ˜ Q ˜ R , A 0 ( D − B M T ) c IP , ˜ Q ˜ R M T X k =1 ` D − B k ´ c ( k ) IP , ˜ q ˜ r QR deomp osition c QR,A Dc M R × M T QR B M T c M R × M T QR B 1 c M R × M T QR + 2 L M T X k =2 c M R × ( M T − k +1) QR Mapping M c M , A 0 B M T c 1 ,M T M B 1 c 1 ,M T M + 2 L M T X k =2 c k,M T M In v erse mapping M − 1 c M − 1 , A 0 ( D − B M T ) c 1 ,M T M − 1 2 L M T X k =2 c 1 ,k − 1 M − 1 + ` D − B M T ´ c 1 ,M T M − 1 Redution c red,A 0 0 2 L M T X k =2 c ( k ) red a The index A is a plaeholder for the algorithm n um b er (I, I I, or I I I). Inverse mapping M − 1 . W e denote the o v erall ost of mapping ( ˜ Q 1 ,k , ˜ R 1 ,k ) to ( Q 1 ,k , R 1 ,k ) ( k = 1 , 2 , . . . , M T ) b y c 1 ,k M − 1 . Sine ∆ 0 = 1 and [ ˜ R ] 1 , 1 = [ R ] 2 1 , 1 , b y rst omputing ([ ˜ R ] 1 , 1 ) 1 / 2 and then its in v erse, w e an obtain b oth [ R ] 1 , 1 and the saling fator (∆ 0 [ R ] 1 , 1 ) − 1 = 1 / [ R ] 1 , 1 at the ost of one square ro ot op era- tion and one division. F or k ′ = 2 , 3 , . . . , k , the saling fators (∆ k ′ − 1 [ R ] k ′ ,k ′ ) − 1 an b e obtained aording to (15 ) b y omputing ([ ˜ R ] k ′ − 1 ,k ′ − 1 [ ˜ R ] k ′ ,k ′ ) − 1 / 2 , at the ost of k − 1 full m ultipliations, k − 1 square ro ot op erations, and k − 1 divisions. The en tries of Q 1 ,k and the remaining en tries of R 1 ,k on and ab o v e the main diagonal of R are obtained b y saling the orresp onding en tries of ˜ Q 1 ,k and ˜ R 1 ,k aording to (13) and (14 ), resp etiv ely , at the ost of J k − 1 full m ultipliations. Sine w e neglet the impat of square ro ot op erations and divisions on omplexit y , w e obtain c 1 ,k M − 1 = J k + k − 2 , k = 1 , 2 , . . . , M T . R e dution step. Sine matrix subtration has negligible omplexit y , for a giv en k ∈ { 1 , 2 , . . . , M T } , the omplexit y asso iated with the omputation of H k,M T − Q 1 ,k − 1 R 1 ,k − 1 k,M T , denoted b y c ( k ) red , is giv en b y the omplexit y asso iated with the m ultipliation of the M R × ( k − 1) matrix Q 1 ,k − 1 b y the ( k − 1) × ( M T − k + 1) matrix R 1 ,k − 1 k,M T . Hene, w e obtain c ( k ) red = M R ( k − 1) M T − k + 1 . 6.3. T otal Complexity of A lgorithms IIII The on tribution of a giv en omputational task to the o v erall omplexit y of a giv en algorithm is obtained b y m ultiplying the orresp onding p er-tone omplexit y , omputed in the previous setion, b y the n um b er of 24 relev an t tones. F or simpliit y of exp osition, in the ensuing analysis w e restrit ourselv es to the ase where B k = 2 k L + 1 ( k = 1 , 2 , . . . , M T ) and I 1 ⊆ I 2 ⊆ . . . ⊆ I M T ⊂ D , for whi h w e obtain |I k \I k − 1 | = 2 L and |D\ I k | = D − 2 k L − 1 ( k = 1 , 2 , . . . , M T ). With the total omplexit y of the individual tasks summarized in T able 1 , the omplexit y asso iated with Algorithms II I I is trivially obtained as C I = c IP , H , I + c QR,I (39) C I I = c IP , H , I I + c IP , ˜ Q ˜ R , I I + c QR,I I + c M , I I + c M − 1 , I I (40) C I I I = c IP , H , I I I + c IP , ˜ Q ˜ R , I I I + c QR,I I I + c M , I I I + c M − 1 , I I I + c red,I I I . (41) 6.4. Complexity Comp arisons In the follo wing, w e iden tify onditions on the system parameters and on the in terp olation ost c IP that guaran tee that Algorithms I I and I I I exhibit smaller omplexit y than Algorithm I. W e start b y omparing Algorithms I and I I and note that C I − C I I = ( D − B M T ) c M R × M T QR − c 1 ,M T M − 1 − M T ( M T + 1) 2 c IP − B M T c 1 ,M T M . (42) Hene, if c IP satises c IP < c IP ,max,I I , 2 c M R × M T QR − c 1 ,M T M − 1 M T ( M T + 1) (43) then there exists a D min su h that C I I < C I for D ≥ D min , i.e., Algorithm I I exhibits a lo w er omplexit y than Algorithm I for a suien tly high n um b er of data-arrying tones D . Moreo v er, for c IP < c IP ,max,I I , inreasing B M T redues C I − C I I . If the inequalit y (43 ) is met, (42) implies, sine B M T = 2 M T L + 1 , that for inreasing L and with all other parameters xed, Algorithm I I exhibits smaller sa vings. F or larger c M R × M T QR , again with all other parameters xed, Algorithm I I exhibits larger sa vings. In order to ompare Algorithms I I and I I I, w e start from ( 40 ) and (41 ) and rewrite C I I − C I I I as C I I − C I I I = ∆ c QR + ∆ c M , M − 1 + ∆ c IP , H ˜ Q ˜ R − c red,I I I (44) where w e ha v e in tro dued ∆ c QR , c QR,I I − c QR,I I I ∆ c M , M − 1 , c M , I I + c M − 1 , I I − c M , I I I − c M − 1 , I I I ∆ c IP , H ˜ Q ˜ R , c IP , H , I I + c IP , ˜ Q ˜ R , I I − c IP , H , I I I − c IP , ˜ Q ˜ R , I I I . F rom the results in T able 1 w e get ∆ c QR = 2 L M T X k =2 c M R × M T QR − c M R × ( M T − k +1) QR (45) 25 whi h is p ositiv e sine, ob viously , c M R × M T QR > c M R × ( M T − k +1) QR ( k = 2 , 3 , . . . , M T ). F urthermore, again em- plo ying the results in T able 1, straigh tforw ard alulations yield ∆ c IP , H ˜ Q ˜ R = − 2 L M T X k =2 k ( k − 1 ) c IP = − 2 3 LM T M 2 T − 1 c IP (46) and ∆ c M , M − 1 = B 1 − B M T M R − 1 = − 2 L M R − 1 M T − 1 . (47) W e observ e that ( 44)(47 ), along with the expression for c red,I I I in T able 1, imply that C I I − C I I I do es not dep end on D and is prop ortional to L . Moreo v er, it follo ws from ( 44 ) and (46 ) that C I I I < C I I is equiv alen t to c IP < c IP ,max,I I I with c IP ,max,I I I , ∆ c QR + ∆ c M , M − 1 − c red,I I I 2 3 LM T ( M 2 T − 1) . (48) W e note that the RHS of ( 48) dep ends solely on M T and M R , sine ∆ c QR , ∆ c M , M − 1 , and c red,I I I are prop ortional to L . Hene, if ∆ c QR + ∆ c M , M − 1 − c red,I I I > 0 and for c IP suien tly small, Algorithm I I I has lo w er omplexit y than Algorithm I I. 7. The MMSE Case In this setion, w e mo dify the QR deomp osition algorithms desrib ed in Setion 5 to obtain orre- sp onding algorithms that ompute the MMSE-QR deomp osition, as dened in Setion 3.2 , of the hannel matries H ( s n ) , n ∈ D . In Setion 7.1 , w e disuss the general onept of regularized QR deomp osition, of whi h MMSE-QR deomp osition is a sp eial ase. In Setion 7.2 , w e use the results of Setion 7.1 to form ulate and analyze MMSE-QR deomp osition algorithms for MIMO-OFDM. 7.1. R e gularize d QR De omp osition In the follo wing, w e onsider, as done in Setion 2.2 , a generi matrix A ∈ C P × M , with P ≥ M . Denition 10. The r e gularize d QR de omp osition of A with the real-v alued r e gularization p ar ameter α > 0 , is the unique fatorization A = QR , where the r e gularize d QR fators Q ∈ C P × M and R ∈ C M × M are obtained as follo ws: ¯ A = ¯ QR is the unique QR deomp osition of the full-rank ( P + M ) × M augmen ted matrix ¯ A , [ A T α I M ] T , and Q , ¯ Q 1 ,P . In the follo wing, w e onsider GS-based and UT-based algorithms for omputing the regularized QR de- omp osition of A through the QR deomp osition of the augmen ted matrix ¯ A . W e will see that b oth lasses 26 of algorithms exhibit higher omplexit y than the orresp onding algorithms for QR deomp osition of A desrib ed in Setion 2.2 . GS-based QR deomp osition of ¯ A pro dues Q , R , and, as a b y-pro dut, the M × M matrix ¯ Q P +1 ,P + M . Sine GS-based QR deomp osition aording to (1)(3 ) op erates on en tire olumns of the matrix to b e deomp osed, the omputation of ¯ Q P +1 ,P + M an not b e a v oided. Th us, GS-based regularized QR deom- p osition of A has the same omplexit y as GS-based QR deomp osition of ¯ A , whi h in turn has a higher omplexit y than GS-based QR deomp osition of A . Represen ting the UT-based QR deomp osition of ¯ A in the standard form (4 ) yields Θ U · · · Θ 2 Θ 1 A I P 0 α I M 0 I M | {z } = ¯ A I P + M = R ¯ Q H 0 ( ¯ Q ⊥ ) H (49) with the ( P + M ) × ( P + M ) unitary matries Θ u , u = 1 , 2 , . . . , U , and where ¯ Q ⊥ is a ( P + M ) × P matrix satisfying ( ¯ Q ⊥ ) H ¯ Q ⊥ = I P and ¯ Q H ¯ Q ⊥ = 0 . By rewriting the RHS of ( 49 ) as R ¯ Q H 0 ( ¯ Q ⊥ ) H = R Q H ( ¯ Q P +1 ,P + M ) H 0 (( ¯ Q ⊥ ) 1 ,P ) H (( ¯ Q ⊥ ) P +1 ,P + M ) H (50) w e observ e that UT-based regularized QR deomp osition of A aording to ( 49 ), b esides omputing R and Q H , yields the matries ( ¯ Q ⊥ ) H and ( ¯ Q P +1 ,P + M ) H as b y-pro duts. As observ ed previously in [ 3 ℄ , the orresp onding omplexit y o v erhead an not b e eliminated ompletely , but it an b e redued b y remo ving the last M olumns on b oth sides of ( 49 ). Th us, using ( 50 ), w e obtain the eient UT-b ase d r e gularize d QR de omp osition desrib ed b y the standard form Θ U · · · Θ 2 Θ 1 A I P α I M 0 = R Q H 0 (( ¯ Q ⊥ ) 1 ,P ) H (51) whi h yields only (( ¯ Q ⊥ ) 1 ,P ) H as a b y-pro dut [3 ℄ . W e note that sine the P × P matrix (( ¯ Q ⊥ ) 1 ,P ) H is larger than the ( P − M ) × P matrix ( Q ⊥ ) H in (4 ), obtained as a b y-pro dut of UT-based QR deomp osition of A , eien t UT-based regularized QR deomp osition of A exhibits higher omplexit y than UT-based QR deomp osition of A . Finally , w e note that sine Q = ¯ Q 1 ,P , applying the mapping M to the regularized QR fators Q and R of A aording to (10 )(12 ) is equiv alen t to applying M to the QR fators ¯ Q and R of ¯ A to obtain ˜ ¯ Q and ˜ R follo w ed b y extrating ˜ Q = ˜ ¯ Q 1 ,P . With this insigh t, it is straigh tforw ard to v erify that Theorem 9, form ulated for QR deomp osition of an LP matrix A ( s ) , is v alid for regularized QR deomp osition of A ( s ) as w ell. 27 7.2. Appli ation to MIMO-OFDM MMSE-Base d Dete tors With the denition of regularized QR deomp osition in the previous setion, w e reognize that MMSE- QR deomp osition of H ( s n ) , dened in Setion 3.2, is a sp eial ase of regularized QR deomp osition of H ( s n ) obtained b y setting the regularization parameter α to √ M T σ w . The mo diation of Algorithms I and I I to the MMSE ase is straigh tforw ard and simply amoun ts to replaing, in Step 2 of b oth algorithms, QR deomp osition b y MMSE-QR deomp osition. The resulting algorithms are referred to as Algorithm I- MMSE and Algorithm I I-MMSE, resp etiv ely . In the follo wing, w e ompare the omplexit y of Algorithm I-MMSE and Algorithm I I-MMSE. By de- noting the omplexit y asso iated with omputing the MMSE-QR deomp osition of an M R × M T matrix b y c M R × M T MMSE-QR , the o v erall omplexit y of Algorithms I-MMSE and I I-MMSE is giv en b y C I-MMSE = C I + D c M R × M T MMSE-QR − c M R × M T QR (52) and C I I-MMSE = C I I + B M T c M R × M T MMSE-QR − c M R × M T QR (53) resp etiv ely . Sine c M R × M T MMSE-QR > c M R × M T QR , as explained in Setion 7.1 , (52 ) and (53 ) imply that C I-MMSE > C I and C I I-MMSE > C I I , resp etiv ely . Th us, from (39), (40 ), (52 ), and (53 ), w e get C I I-MMSE C I I = ( c M , I I + c IP , ˜ Q ˜ R , I I + c M − 1 , I I ) + B M T c 1 ,M T IP , H + c M R × M T MMSE-QR ( c M , I I + c IP , ˜ Q ˜ R , I I + c M − 1 , I I ) + B M T c 1 ,M T IP , H + c M R × M T QR < c 1 ,M T IP , H + c M R × M T MMSE-QR c 1 ,M T IP , H + c M R × M T QR = C I-MMSE C I (54) where the inequalit y follo ws from the simple prop ert y α > β > 0 , γ > 0 = ⇒ γ + α γ + β < α β . F rom (54 ) w e an therefore onlude that C I I-MMSE C I-MMSE < C I I C I whi h implies, assuming C I I < C I , that the relativ e sa vings of Algorithm I I-MMSE o v er Algorithm I-MMSE are larger than the relativ e sa vings of Algorithm I I o v er Algorithm I. Finally , w e briey disuss the extension of Algorithm I I I to the MMSE ase. As a starting p oin t, w e on- sider the straigh tforw ard approa h of applying Algorithm I I I to the MMSE-augmen ted hannel matrix ¯ H ( s n ) in (9 ) to pro due ¯ Q ( s n ) and R ( s n ) for all n ∈ D . In the follo wing, w e denote b y ˜ ¯ Q ( s n ) and ˜ R ( s n ) the matri- es resulting from the appliation of the mapping M to ( ¯ Q ( s n ) , R ( s n )) . W e observ e that the straigh tforw ard 28 approa h under onsideration is ineien t, sine w e are only in terested in obtaining Q ( s n ) = ¯ Q 1 ,M R ( s n ) and R ( s n ) for all n ∈ D . Consequen tly , w e w ould lik e to a v oid omputing the last M T ro ws of ¯ Q ( s n ) at as man y tones as p ossible. No w, the redution step (i.e., Step 4 ) in the k th iteration of Algorithm I I I requires kno wledge of ¯ Q 1 ,k − 1 ( s n ) at the tones n ∈ I k \I k − 1 ( k = 2 , 3 , . . . , M T ). Hene, at the tones n ∈ I k \I k − 1 w e m ust ompute all M R + M T ro ws of ¯ Q 1 ,k − 1 ( s n ) an yw a y . In on trast, at the tones n ∈ D\ I M T the last M T ro ws of ¯ Q ( s n ) are not required. Therefore, at the tones n ∈ D \I M T w e an restrit in terp olation and in v erse mapping to ˜ Q ( s n ) = ˜ ¯ Q 1 ,M R ( s n ) and ˜ R ( s n ) . In the follo wing, w e partition ˜ ¯ q k ( s n ) , the k th olumn of ˜ ¯ Q ( s n ) , as ˜ ¯ q k s n = ˜ q k ( s n ) ˇ q k ( s n ) , k = 1 , 2 , . . . , M T with the M R × 1 v etor ˜ q k ( s n ) and the M T × 1 v etor ˇ q k ( s n ) . With this notation, w e an form ulate the resulting algorithm as follo ws: A lgorithm III-MMSE 1. Set k ← 1 . 2. In terp olate H k,M T ( s ) from S ( E ) to S ( I k \I k − 1 ) . 3. F or ea h n ∈ I k \I k − 1 , onstrut ¯ H k,M T ( s n ) aording to (9 ). 4. If k = 1 , go to Step 6. Otherwise, for ea h n ∈ I k \I k − 1 , apply M − 1 : ( ˜ ¯ Q 1 ,k − 1 ( s n ) , ˜ R 1 ,k − 1 ( s n )) 7→ ( ¯ Q 1 ,k − 1 ( s n ) , R 1 ,k − 1 ( s n )) . 5. F or ea h n ∈ I k \I k − 1 , o v erwrite ¯ H k,M T ( s n ) b y ¯ H k,M T ( s n ) − ¯ Q 1 ,k − 1 ( s n ) R 1 ,k − 1 k,M T ( s n ) . 6. F or ea h n ∈ I k \I k − 1 , p erform QR deomp osition on ¯ H k,M T ( s n ) to obtain ¯ Q k,M T ( s n ) and R k,M T k,M T ( s n ) , and, if k > 1 , onstrut R k,M T ( s n ) = [ 0 R k,M T k,M T ( s n ) ] . 7. F or ea h n ∈ I k \I k − 1 , apply M : ( ¯ Q k,M T ( s n ) , R k,M T ( s n )) 7→ ( ˜ ¯ Q k,M T ( s n ) , ˜ R k,M T ( s n )) . a 8. In terp olate ˜ q k ( s ) and ˜ r T k ( s ) from S ( I k ) to S ( D\I k ) . 9. If k = M T , pro eed to Step 11 . Otherwise, in terp olate ˇ q k ( s ) from S ( I k ) to S ( I M T \I k ) . 10. Set k ← k + 1 and go ba k to Step 2. 11. F or ea h n ∈ D \I M T , apply M − 1 : ( ˜ Q ( s n ) , ˜ R ( s n )) 7→ ( Q ( s n ) , R ( s n )) . a Sine ˇ q M T ( s n ) is not needed, its omputation in the M T th iteration an b e skipp ed. A detailed omplexit y analysis of Algorithm I I I-MMSE go es b ey ond the sop e of this pap er. W e men- tion, ho w ev er, the follo wing imp ortan t asp et of the omparison of Algorithm I I I-MMSE with Algorithms I-MMSE and I I-MMSE. Step 2 of Algorithms I-MMSE and I I-MMSE requires MMSE-QR deomp osition, whi h is a sp eial ase of regularized QR deomp osition, whereas Step 6 of Algorithm I I I-MMSE requires QR deomp osition of an augmen ted matrix. As sho wn in Setion 7.1 , the algorithms for regularized QR de- omp osition and for QR deomp osition of an augmen ted matrix ha v e the same omplexit y under a GS-based 29 approa h, but not under a UT-based approa h. In the latter ase, Algorithms I-MMSE and I I-MMSE an p erform eien t UT-based regularized QR deomp osition aording to the standard form (51 ), whereas Algorithm I I I-MMSE m ust p erform UT-based QR deomp osition of an augmen ted matrix aording to the standard form (49 ), whi h results in higher omplexit y . This asp et do es not o ur in the omparison of Algorithm I I I with Algorithms I and I I and will b e further examined n umerially in Setion 9.2 . 8. Eien t In terp olation Throughout this setion, w e onsider in terp olation of a generi LP a ( s ) ∼ ( V 1 , V 2 ) of maxim um degree V = V 1 + V 2 from B to T , where |B | = B and |T | = T . W e note that in the on text of in terp olation in MIMO-OFDM systems, relev an t for the algorithms presen ted in this pap er, all base p oin ts and all target p oin ts orresp ond to OFDM tones. Therefore, in the follo wing w e assume that B and T satisfy the ondition B ∪ T ⊆ { s 0 , s 1 , . . . , s N − 1 } . (55) The omplexit y analysis in Setion 6 sho w ed that in terp olation-based QR deomp osition algorithms yield sa vings o v er the brute-fore approa h only if c IP is suien tly small. Straigh tforw ard in terp olation of a ( s ) , whi h orresp onds to diret ev aluation of ( 8), is p erformed b y arrying out the m ultipliation of the T × B in terp olation matrix TB † b y the B × 1 v etor a B . The orresp onding omplexit y is giv en b y T B , whi h results in c IP = B full m ultipliations p er target p oin t. In the on text of in terp olation-based QR deomp osition, this omplexit y ma y b e to o high to get sa vings o v er the brute-fore approa h in Algorithms I or I-MMSE, sine exat in terp olation of ˜ q k ( s ) ∼ ( kL , k L ) and ˜ r T k ( s ) ∼ ( kL , k L ) requires B ≥ 2 k L + 1 ( k = 1 , 2 , . . . , M T ), with the w orst ase b eing B ≥ 2 M T L + 1 . In this setion, w e presen t in terp olation metho ds haraterized b y signian tly smaller v alues of c IP . As demonstrated b y the n umerial results in Setion 9 , this an then lead to signian t sa vings of the in terp olation-based approa hes for QR deomp osition o v er the brute-fore approa h. 8.1. Interp olation with De di ate d Multipliers As already noted, the in terp olation matrix TB † is a funtion of B , T , V 1 and V 2 , but not of the realization of the LP a ( s ) to b e in terp olated. Hene, as long as B , T , V 1 and V 2 do not hange, m ultiple LPs an b e in terp olated using the same in terp olation matrix TB † , whi h an b e omputed o-line. This observ ation leads to the rst strategy for eien t in terp olation, whi h onsists of arrying out the matrix-v etor pro dut ( TB † ) a B in (8) through T B onstan t m ultipliations, where the en tries of TB † are onstan t and the en tries of a B are v ariable. In the on text of VLSI implemen tation, full m ultipliations and onstan t m ultipliations dier signi- an tly . Whereas a full m ultipliation m ust b e p erformed b y a ful l multiplier whi h pro esses t w o v ariable 30 op erands, in a onstan t m ultipliation, the fat that one of the op erands, and more sp eially its binary represen tation, is kno wn a priori, an b e exploited to p erform binary logi simpliations that result in a drastially simpler iruit [10 ℄. The resulting m ultiplier, alled a de di ate d multiplier in the follo wing, onsumes only a fration of the silion area (do wn to 1 / 9 , as rep orted in [ 7 ℄ for omplex-v alued dediated m ultipliers) required b y a full m ultiplier, and exhibits the same pro essing dela y . F urthermore, w e men tion that it is p ossible to obtain further area sa vings, again without aeting the pro essing dela y , b y merging K dediated m ultipliers in to a single blo k m ultiplier that join tly p erforms the K m ultipliations, aording to a te hnique kno wn as p artial pr o dut sharing [ 11 ℄, whi h essen tially exploits ommon bit patterns in the binary represen tations of the K o eien ts to obtain iruit simpliations. F or simpliit y of exp osition, in the sequel w e do not onsider partial pro dut sharing. In the remainder of the pap er, χ C and χ R denote the omplexit y asso iated with a onstan t m ultipli- ation of a omplex-v alued v ariable op erand b y a omplex-v alued and b y a real-v alued onstan t o eien t, resp etiv ely . Sine TB † is real-v alued for V 1 = V 2 and omplex-v alued otherwise, in terp olation through onstan t m ultipliations with dediated m ultipliers has a omplexit y p er target p oin t of c IP = χ R B , V 1 = V 2 χ C B , V 1 6 = V 2 . By lea ving a autionary implemen tation margin from the b est-eort v alue of 1 / 9 rep orted in [ 7 ℄ , w e assume that χ C = 1 / 4 in the remainder of the pap er. Sine the m ultipliation of t w o omplex-v alued n um b ers requires (assuming straigh tforw ard implemen tation) four real-v alued m ultipliations, whereas m ultiplying a real-v alued n um b er b y a omplex-v alued n um b er requires only t w o real-v alued m ultipliations, w e heneforth assume that χ R = χ C / 2 , whi h leads to χ R = 1 / 8 . 8.2. Equidistant Base Points In the follo wing, w e sa y that the p oin ts in a set { u 0 , u 1 , . . . , u K − 1 } ⊂ U are e quidistant on U if u k = u 0 e j 2 πk /K for k = 1 , 2 , . . . , K − 1 . So far, w e disussed in terp olation of a ( s ) ∼ ( V 1 , V 2 ) for generi sets B and T . In the remainder of Setion 8 w e will, ho w ev er, fo us on the follo wing sp eial ase. Giv en in tegers B , R > 1 , w e onsider the set of B base p oin ts B = { b k = e j 2 πk /B : k = 0 , 1 , . . . , B − 1 } and the set of T = ( R − 1) B target p oin ts T = { t ( R − 1) k + r − 1 = b k e j 2 πr / ( RB ) : k = 0 , 1 , . . . , B − 1 , r = 1 , 2 , . . . , R − 1 } . W e note that b oth the B p oin ts in B and the RB p oin ts in B ∪ T = { e j 2 πl/ ( RB ) : l = 0 , 1 , . . . , RB − 1 } are equidistan t on U . Hene, in terp olation of a ( s ) from B to T essen tially amoun ts to an R -fold inrease in the sampling rate of a ( s ) on U , and will therefore b e termed upsampling of a ( s ) fr om B e quidistant b ase p oints by a fator of R in the remainder of the pap er. The orresp onding base p oin t matrix B and target p oin t matrix T are onstruted aording to (6) and (7), resp etiv ely . W e note that for B ≥ V + 1 , B satises B H B = B I B and hene B † = (1 /B ) B H . 31 W e reall that the n um b er of OFDM tones N is t ypially a p o w er of t w o. Therefore, in order to ha v e RB equidistan t p oin ts on U while satisfying the ondition ( 55 ), in the follo wing w e onstrain b oth B and R to b e p o w ers of t w o. Finally , in order to satisfy the ondition B ≥ V + 1 mandated b y the requiremen t of exat in terp olation, w e set B = 2 ⌈ log( V +1) ⌉ . 8.3. Interp olation by F ast F ourier T r ansform In the on text of upsampling from B equidistan t base p oin ts b y a fator of R , it is straigh tforw ard to v erify that the B × ( V + 1) matrix B is giv en b y B = ( W B ) B − V 1 +1 ,B ( W B ) 1 ,V 2 +1 (56) and that the ( R − 1) B × ( V + 1) matrix T is obtained b y remo ving the ro ws with indies in R , { 1 , R + 1 , . . . , ( B − 1 ) R + 1 } from the RB × ( V + 1) matrix ¯ T , ( W RB ) RB − V 1 +1 ,RB ( W RB ) 1 ,V 2 +1 . (57) As done in Setion 2.3 , w e onsider the v etors a = [ a − V 1 a − V 1 +1 · · · a V 2 ] T , a B = Ba , and a T = T a . By dening the B -dimensional v etor a ( B ) , [ a 0 a 1 · · · a V 2 0 · · · 0 a − V 1 a − V 1 +1 · · · a − 1 ] T , whi h on tains B − ( V + 1) zeros b et w een the en tries a V 2 and a − V 1 , and b y taking (56 ) in to aoun t, w e an write a B = Ba = W B a ( B ) , from whi h follo ws that a ( B ) = W − 1 B a B . Next, w e insert ( R − 1) B zeros in to a ( B ) after the en try a V 2 to obtain the RB -dimensional v etor a ( RB ) , [ a 0 a 1 · · · a V 2 0 · · · 0 a − V 1 a − V 1 +1 · · · a − 1 ] T . F urther, w e dene a B∪T , [ a ( e j 0 ) a ( e j 2 π/RB ) · · · a ( e j 2 π ( RB − 1) /RB )] T = ¯ Ta to b e the v etor on taining the samples of a ( s ) at the p oin ts in B ∪ T . W e note that using ( 57 ) w e an write ¯ Ta = W RB a ( RB ) . (58) Next, w e observ e that b y remo ving the ro ws with indies in R from b oth sides of the equalit y a B∪T = ¯ Ta w e obtain the equalit y a T = T a . The latter observ ation, om bined with (58 ), implies that a T an b e obtained b y remo ving the ro ws with indies in R from the v etor W RB a ( RB ) . Finally , w e note that sine B and RB are p o w ers of t w o, left-m ultipliation b y W − 1 B and W RB an b e omputed through a B -p oin t radix-2 in v erse FFT (IFFT) and an RB -p oin t radix-2 FFT, resp etiv ely [2℄. W e an therefore onlude that FFT-based in terp olation of a ( s ) from B to T an b e arried out as follo ws: 1. Compute the B -p oin t radix-2 IFFT a ( B ) = W − 1 B a B . 2. Construt a ( RB ) from a ( B ) b y inserting ( R − 1) B zeros after the en try a V 2 in a ( B ) . 3. Compute the RB -p oin t radix-2 FFT a B∪T = W RB a ( RB ) . 4. Extrat a T from a B∪T b y remo ving the en tries of a B∪T with indies in R . 32 No w, w e note that if generi radix-2 IFFT and FFT algorithms are used in Steps 1 and 3, resp etiv ely , the approa h desrib ed ab o v e do es not exploit the struture of the problem at hand and is ineien t in the follo wing three asp ets. First, neither the IFFT in Step 1 nor the FFT in Step 3 tak e in to aoun t that B − ( V + 1) en tries of a ( B ) (and also, b y onstrution, of a ( RB ) ) are zero. As this ineieny do es not arise in the ase B = V + 1 and has only marginal impat on in terp olation omplexit y otherwise, w e will not onsider it further. Seond, the FFT in Step 3 ignores the fat that a ( RB ) on tains the ( R − 1) B zeros that w ere inserted in Step 2. Third, the v alues of a ( s ) at the base p oin ts, whi h are already kno wn prior to in terp olation, are unneessarily omputed b y the FFT in Step 3 and then disarded in Step 4. In the follo wing, w e presen t a mo died FFT algorithm, tailored to the problem at hand, whi h eliminates the latter t w o ineienies and leads to a signian tly lo w er in terp olation omplexit y than the generi FFT-based in terp olation metho d desrib ed ab o v e. F rom no w on, in order to simplify the notation, w e assume that N = RB . Th us, with s n = e j 2 πn/ N , n = 0 , 1 , . . . , N − 1 , the base p oin ts and the target p oin ts are giv en b y b k = s Rk and t ( R − 1) k + r − 1 = s Rk + r ( k = 0 , 1 , . . . , B − 1 , r = 1 , 2 , . . . , R − 1 ), resp etiv ely . The deriv ation presen ted in the follo wing will b e illustrated through an example obtained b y setting B = R = 4 and V 1 = V 2 + 1 = 2 , but is v alid in general for the ase where V 1 and V 2 satisfy the inequalities 0 ≤ V 1 ≤ B / 2 and 0 ≤ V 2 ≤ B / 2 − 1 , resp etiv ely . W e note that these t w o inequalities, om bined with B = 2 ⌈ log( V 1 + V 2 +1) ⌉ , are satised in the ase V 1 = V 2 . Hene, the follo wing deriv ation o v ers the ase of in terp olation of the en tries of ˜ Q ( s ) ∼ ( M T L, M T L ) and ˜ R ( s ) ∼ ( M T L, M T L ) , as required in Algorithms I I, I I I, I I-MMSE and I I I-MMSE. The prop osed mo died FFT is based on a deimation-in-time radix-2 N -p oin t FFT, onsisting of a sram bling stage follo w ed b y log N omputation stages [2 ℄, ea h on taining N / 2 radix-2 butteries desrib ed b y the signal o w graph (SF G) in Fig. 1a. The t widdle fators used in the FFT butteries are p o w ers of ω N , e − j 2 π/ N . The SF G of the unmo died N -p oin t FFT is sho wn in Fig. 1 b. W e observ e that the sram bling stage at the b eginning of the FFT (not depited in Fig. 1 b) auses the nonzero en tries a − V 1 , a − V 1 +1 , . . . , a V 2 of a ( RB ) to b e sattered rather than to app ear in blo ks as is the ase in a ( RB ) . The main idea of the prop osed approa h is to prune all SF G bran hes that in v olv e m ultipliations and additions with op erands equal to zero, as done in [15 ℄, 5 and all SF G bran hes that lead to the omputation of the already kno wn v alues of a ( s ) at the base p oin ts. The SF G of the resulting pruned FFT is sho wn in Fig. 2a. F urther omplexit y redutions an b e obtained as follo ws. W e observ e that in the pruned FFT, the SF G bran hes departing from a 0 , a 1 , . . . , a V 2 on tain no arithmeti op erations in the rst log R omputation stages. In on trast, the SF G bran hes departing from a − V 1 , a − V 1 +1 , . . . , a − 1 on tain m ultipliations b y t widdle fators in ea h of the rst log R omputation stages. These m ultipliations an ho w ev er b e shifted 5 The SF G pruning approa h prop osed in [ 15 ℄ applies to the ase V 1 = 0 only . 33 (with ω k + N / 2 N = − ω k N ) (a) (b) Figure 1: (a) SF G of a radix-2 buttery (top) with t widdle fator ω k N , and alternativ e, equiv alen t represen tation (b ottom) needed for ompat illustration in FFT SF Gs. (b) SF G of the full N -p oin t radix-2 deimation-in-time FFT, without the sram bling stage. N = RB , B = R = 4 , V 1 = V 2 + 1 = 2 . SF G bran hes depited in grey will b e pruned. (a) (b) Figure 2: SF G of the pruned N -p oin t FFT, without the sram bling stage, b efore (a) and after (b) shifting all m ultipliations from the rst log R stages in to stage 1 + log R . N = RB , B = R = 4 , V 1 = V 2 + 1 = 2 . 34 in to omputation stage 1 + lo g R through basi SF G transformations. The result is the mo died FFT illustrated in Fig. 2 b, for whi h the rst log R omputation stages do not on tain an y arithmeti op erations and therefore ha v e zero omplexit y , whereas the last log B omputation stages on tain ( R − 1) B / 2 butteries ea h. Th us, sine ea h radix-2 buttery en tails one full m ultipliation, 6 the total omplexit y of FFT-based in terp olation of a ( s ) from B to T is determined b y the ( B / 2) log B full m ultipliations required b y the B -p oin t radix-2 IFFT a ( B ) = W − 1 B a B and the ( R − 1)( B / 2) log B full m ultipliations required in the last log B omputation stages of the prop osed mo died RB -p oin t FFT, whi h omputes a T from a ( RB ) . The orresp onding in terp olation omplexit y p er target p oin t is therefore giv en b y c IP ,FFT , B 2 log B + ( R − 1) B 2 log B ( R − 1) B = 1 2 R R − 1 log B . (59) W e men tion that a mo died RB -p oin t FFT an b e deriv ed, analogously to ab o v e, also in the ase V 1 = 0 (for whi h V = V 2 and B = 2 ⌈ log( V 2 +1) ⌉ ), relev an t for in terp olation of H ( s ) ∼ (0 , L ) in Algorithms II I I and I-MMSE through I I I-MMSE. The orresp onding in terp olation omplexit y p er target p oin t is again giv en b y (59 ). Finally , w e note that in MIMO-OFDM transeiv ers the FFT pro essor that p erforms N -p oin t IFFT/FFT for OFDM mo dulation/demo dulation an b e reused with sligh t mo diations to arry out the B -p oin t IFFT and the prop osed mo died RB -p oin t FFT that are needed for in terp olation. Su h a resoure sharing approa h redues the silion area asso iated with in terp olation and hene further redues c IP ,FFT . The resulting sa vings will, for the sak e of generalit y of exp osition, not b e tak en in to aoun t in the follo wing. 8.4. Interp olation by FIR Filtering W e onsider upsampling of a ( s ) from B equidistan t base p oin ts b y a fator of R , as dened in Setion 8.2 . The deriv ations in this setion are v alid for arbitrary in tegers B , R > 1 , and hene not sp ei to the ase where B and R are p o w ers of t w o. Prop osition 11. In the ontext of upsampling fr om B e quidistant b ase p oints by a fator of R , the B ( R − 1) × B interp olation matrix TB † satises the fol lowing pr op erties: 1. Ther e exists an ( R − 1) × B matrix F 0 suh that TB † an b e written as TB † = F 0 C B F 0 C 2 B . . . F 0 C B B (60) 6 W e assume that the FFT pro essor do es not use an y dediated m ultipliers. 35 with the B × B ir ulant matrix C B , 0 I B − 1 1 0 . 2. The matrix F 0 , as impliitly dene d in (60), satises F 0 r,k +1 = F 0 ∗ R − r,B − k , r = 1 , 2 , . . . , R − 1 , k = 0 , 1 , . . . , B − 1 . Pr o of. Sine B † = (1 / B ) B H , the en tries of TB † are giv en b y TB † k ( R − 1)+ r,k ′ +1 = 1 B V 2 X v = − V 1 e − j 2 πv R ( k − k ′ )+ r RB (61) for k , k ′ = 0 , 1 , . . . , B − 1 and r = 1 , 2 , . . . , R − 1 . The t w o prop erties are no w established as follo ws: 1. The RHS of (61) remains un hanged up on replaing k and k ′ b y ( k + 1) mo d B and ( k ′ + 1) mo d B , resp etiv ely . Hene, for a giv en r ∈ { 1 , 2 , . . . , R − 1 } , the B × B matrix obtained b y sta king the ro ws indexed b y r , ( R − 1) + r, . . . , ( B − 1 )( R − 1) + r (in this order) of TB † is irulan t. By taking F 0 to onsist of the last R − 1 ro ws of TB † , and using C B B = I B , along with the fat that for b ∈ Z , the m ultipliation F 0 C b B orresp onds to irularly shifting the olumns of F 0 to the righ t b y b mo d B p ositions, w e obtain ( 60 ). 2. The en tries of F 0 are obtained b y setting k = B − 1 in (61 ) and are giv en b y [ F 0 ] r,k ′ +1 = 1 B V 2 X v = − V 1 e − j 2 πv r − R ( k ′ +1) RB , r = 1 , 2 , . . . , R − 1 , k ′ = 0 , 1 , . . . , B − 1 . Hene, for r = 1 , 2 , . . . , R − 1 and k ′ = 0 , 1 , . . . , B − 1 , w e obtain [ F 0 ] ∗ R − r,B − k ′ = 1 B V 2 X v = − V 1 e j 2 πv R − r − R ( B − k ′ ) RB = 1 B V 2 X v = − V 1 e − j 2 πv r − R ( k ′ +1) RB = [ F 0 ] r,k ′ +1 . W e note that Prop ert y 1 in Prop osition 11 implies that the matrix-v etor m ultipliation ( TB † ) a B in (8) an b e arried out through the appliation of R − 1 FIR lters. Sp eially , for r = 1 , 2 , . . . , R − 1 , the en tries r , r + R , . . . , r + ( B − 1) R of a T an b e obtained b y omputing the irular on v olution of a B with the impulse resp onse of length B on tained in the r th ro w of F 0 . In the remainder of the pap er, w e will sa y that the R − 1 FIR lters are dene d b y F 0 . By allo ating B dediated m ultipliers p er FIR lter (one 36 p er impulse resp onse tap), w e w ould need a total of ( R − 1) B dediated m ultipliers. W e will next see that the omplex-onjugate symmetry in the ro ws of F 0 , form ulated as Prop ert y 2 in Prop osition 11 , allo ws to redue the n um b er of dediated m ultipliers and the in terp olation omplexit y b y a fator of t w o. In the follo wing, w e assume that the m ultipliations of a v ariable omplex-v alued op erand b y a onstan t γ ∈ C and b y its omplex onjugate γ ∗ an b e arried out using the same dediated m ultiplier, and that the resulting omplexit y is omparable to the omplexit y of m ultipliation b y γ alone. This is justied as the m ultipliation b y γ ∗ , ompared to the m ultipliation b y γ , in v olv es the same four underlying real- v alued m ultipliations and only requires t w o additional sign ips, whi h ha v e signian tly smaller omplexit y than the real-v alued m ultipliations. Th us, w e an p erform m ultipliation b y the o eien ts [ F 0 ] r,k +1 and [ F 0 ] R − r,B − k = [ F 0 ] ∗ r,k +1 through a single dediated m ultiplier ( r = 1 , 2 , . . . , R/ 2 , k = 0 , 1 , . . . , B / 2 − 1 ). This resoure sharing approa h leads to c IP = χ R 2 B , V 1 = V 2 χ C 2 B , V 1 6 = V 2 . (62) So far, w e assumed that a ( s ) is in terp olated from the B = 2 ⌈ log( V +1) ⌉ base p oin ts in B , resulting in c IP aording to (62). W e will next sho w that the in terp olation omplexit y an b e further redued b y using a smaller n um b er of base p oin ts B ′ < B . In terp olation will b e exat as long as the ondition B ′ ≥ V + 1 is satised. As done ab o v e, w e assume kno wledge of the B samples a ( s ) , s ∈ B . In the follo wing, ho w ev er, w e require that for a giv en target p oin t t r , the sample a ( t r ) is obtained b y in terp olation from only B ′ base p oin ts, pi k ed from the B elemen ts of B as a funtion of t r . F or simpliit y of exp osition, w e assume that B ′ is ev en, and for ev ery t r ∈ T w e ho ose the B ′ elemen ts of B that are lo ated losest to t r on U . W e will next sho w that the resulting in terp olation of a ( s ) from B to T an b e p erformed through FIR ltering. In the follo wing, w e dene B disjoin t subsets T k of T (satisfying T 0 ∪ T 1 ∪ . . . ∪ T B − 1 = T ) and onsider the orresp onding subsets B k of B , dened su h that for all p oin ts in T k , the B ′ losest base p oin ts are giv en b y the elemen ts of B k ( k = 0 , 1 , . . . , B − 1 ). W e next sho w that the in terp olation matrix orresp onding to in terp olation of a ( s ) from B k to T k is indep enden t of k . T o this end, w e rst onsider the set of target p oin ts T 0 , { t ( B − 1)( R − 1)+ r − 1 : r = 1 , 2 , . . . , R − 1 } , on taining the R − 1 target p oin ts lo ated on U b et w een the base p oin ts b B − 1 and b 0 . The subset of B on taining the B ′ p oin ts that are losest to ev ery p oin t in T 0 is giv en b y B 0 , { b 0 , b 1 , . . . , b B ′ / 2 , b B − B ′ / 2 , b B − B ′ / 2+1 , . . . , b B − 1 } . In terp olation of a ( s ) from B 0 to T 0 in v olv es the base p oin t matrix B 0 , the target p oin t matrix T 0 , and the in terp olation matrix T 0 B † 0 , onstruted as desrib ed in Setion 2.3 . Next, for k = 1 , 2 , . . . , B − 1 , w e denote b y B k and T k the sets obtained b y m ultiplying all elemen ts of B 0 and T 0 , resp etiv ely , b y e j 2 πk /B . W e note that T k on tains the R − 1 target p oin ts lo ated on U b et w een the base p oin ts b k − 1 and b k , and that B k is the subset of B on taining the B ′ p oin ts that are losest to ev ery p oin t in T k . With the unitary matrix S k , diag (( e j 2 πk /B ) V 1 , ( e j 2 πk /B ) V 1 − 1 , . . . , ( e j 2 πk /B ) − V 2 ) , in terp olation 37 of a ( s ) from B k to T k in v olv es the base p oin t matrix B k = B 0 S k , with pseudoin v erse B † k = S − 1 k B † 0 , the target p oin t matrix T k = T 0 S k , and the in terp olation matrix T k B † k = T 0 S k S − 1 k B † 0 = T 0 B † 0 ( k = 1 , 2 , . . . , B − 1 ). Hene, the in terp olation matrix is indep enden t of k and is the same as in the in terp olation of a ( s ) from B 0 to T 0 . No w, in terp olation of a ( s ) from B to T , with the onstrain t that the sample of a ( s ) at ev ery target p oin t is omputed only from the samples of a ( s ) at the B ′ losest base p oin ts, amoun ts to p erforming in terp olation of a ( s ) from B k to T k for all k = 0 , 1 , . . . , B − 1 , and an b e written in a single equation as a T = F a B . Here, the ( R − 1) B × B in terp olation matrix F is equal to the RHS of ( 60 ), with the ( R − 1) × B matrix F 0 = ( T 0 B † 0 ) 1 ,B ′ / 2 0 ( T 0 B † 0 ) B − B ′ / 2+1 ,B (63) whi h on tains an all-zero submatrix of dimension ( R − 1) × ( B − B ′ ) . Hene, F satises Prop ert y 1 of Prop osition 11 , with F 0 giv en b y (63 ). In addition, w e state without pro of that F 0 in (63) satises Prop ert y 2 of Prop osition 11 . W e an therefore onlude that in terp olation from the losest B ′ base p oin ts main tains the strutural prop erties of in terp olation from all B base p oin ts and, as ab o v e, an b e p erformed b y FIR ltering using R − 1 lters with dediated m ultipliers that exploit the onjugate symmetry in the ro ws of F 0 . Sine the ro ws of F 0 in (63 ) on tain B − B ′ zeros, the R − 1 impulse resp onses no w ha v e length B ′ , and w e obtain c IP = χ R 2 B ′ , V 1 = V 2 χ C 2 B ′ , V 1 6 = V 2 . (64) 8.5. Inexat Interp olation The in terp olation omplexit y ( 64) of the approa h desrib ed in Setion 8.4 an b e further redued b y ho osing B ′ to b e smaller than V + 1 . This omes, ho w ev er, at the ost of a systemati in terp olation error and onsequen tly leads to a trade-o b et w een in terp olation omplexit y and in terp olation auray . In the on text of MIMO-OFDM detetors, it is demonstrated in Setion 9.1 that the p erformane degradation resulting from this systemati in terp olation error is often negligible. In the follo wing, w e prop ose an ad-ho metho d for inexat in terp olation. The basi idea onsists of in tro duing an in terp olation error metri and form ulating a orresp onding optimization problem, whi h yields the matrix F 0 that denes the FIR lters for inexat in terp olation. F or simpliit y of exp osition, w e restrit our disussion to inexat in terp olation of ˜ Q ( s ) ∼ ( M T L, M T L ) and ˜ R ( s ) ∼ ( M T L, M T L ) with V 1 = V 2 = M T L , as required in Step 4 of Algorithm I I. F or random-v alued MIMO hannel taps H 0 , H 1 , . . . , H L , w e prop ose to quan tify the in terp olation error aording to e ( F 0 ) , E X n ∈D \I M T k Q H s n H s n − R s n k 2 2 (65) 38 where the exp etation is tak en o v er H 0 , H 1 , . . . , H L , and where the dep endene of the RHS of (65) on F 0 is impliit through the fat that within Algorithm I I, the omputation of Q ( s n ) and R ( s n ) at the tones n ∈ D \I M T in v olv es in terp olation through the FIR lters dened b y F 0 . W e men tion that the metri e ( F 0 ) in (65) is relev an t for MIMO-OFDM sphere deo ding, and that minimization of e ( F 0 ) do es not neessar- ily lead to optimal detetion p erformane. Other appliations in v olving QR deomp osition of p olynomial matries ma y require alternativ e error metris. F or upsampling from B equidistan t base p oin ts b y a fator of R , under the ondition V 1 = V 2 , the matrix F 0 in (63 ) is a funtion of N , R , B , B ′ , and V 1 . No w, w e ha v e that N is a xed system parameter and B = 2 ⌈ log(2 M T L +1) ⌉ . Moreo v er, R is determined b y N , B , and D , sine R is either giv en b y R = N/ B in the ase |D| = N or is a funtion of B and D in the ase |D| < N . Finally , under a xed omplexit y budget (i.e., a giv en v alue for c IP ), B ′ is onstrained b y (64). No w, ˜ Q ( s ) , ˜ R ( s ) ∼ ( M T L, M T L ) determines V 1 = M T L , but w e prop ose, instead, to onsider V 1 as a v ariable parameter, so that F 0 = F 0 ( V 1 ) . The in terp olation error is then minimized b y rst determining V ′ 1 , arg min V 1 ∈{ 1 , 2 ,...,M T L } e ( F 0 ( V 1 )) n umerially , and then p erforming in terp olation through the FIR lters dened b y F 0 ( V ′ 1 ) . 9. Numerial Results The results presen ted so far do not dep end on a sp ei QR deomp osition metho d. F or the n umerial omplexit y omparisons presen ted in this setion, w e will get more sp ei and assume UT-based QR deom- p osition p erformed through Giv ens rotations and o ordinate rotation digital omputer (CORDIC) op erations [18 , 19 ℄, whi h is the metho d of hoie in VLSI implemen tations [ 3 , 12 ℄. F or A ∈ C P × M with P ≥ M , it w as sho wn in [ 3℄ that the omplexit y of UT-based QR deomp osition of A aording to the standard form (4), as required in Algorithms II I I, is giv en b y c P × M QR , 3 2 ( P 2 M + P M 2 ) − M 3 − 1 2 ( P 2 − P + M 2 + M ) and that the omplexit y of eien t UT-based regularized QR deomp osition of A aording to the standard form (51 ), as required in Algorithms I-MMSE and I I-MMSE, is giv en 7 b y c P × M MMSE-QR , 3 2 ( P 2 M + P M 2 ) − 1 2 P 2 + 1 2 P. (66) The results in [3 ℄ arry o v er, in a straigh tforw ard fashion, to UT-based QR deomp osition of the augmen ted matrix [ A T α I M ] T aording to the standard form (49 ), as required in Algorithm I I I-MMSE, to yield c P × M QR,I I I-MMSE , c P × M MMSE-QR + 3 2 P M 2 + 1 2 P M . 7 In [ 3 ℄ , the last term on the RHS of (66 ) w as erroneously sp eied as − (1 / 2) P . 39 9.1. Eient Interp olation and Performan e De gr adation W e start b y quan tifying the trade-o b et w een in terp olation omplexit y and detetion p erformane, de- srib ed in Setion 8.5. Sp eially , w e ev aluate the loss in detetion p erformane as w e gradually redue B ′ , and hene also c IP , in the in terp olation of ˜ Q ( s ) and ˜ R ( s ) , as required b y Algorithm I I. The orresp onding analysis for the in terp olation of ˜ q k ( s ) and ˜ r T k ( s ) , k = 1 , 2 , . . . , M T , as required b y Algorithm I I I, is more in v olv ed and do es not yield an y additional insigh t in to the trade-o under onsideration. The n umerial results presen ted in the follo wing demonstrate that for Algorithm I I to ha v e smaller omplexit y than Algo- rithm I, setting B ′ to a v alue smaller than V + 1 , and hene aepting a systemati in terp olation error, ma y b e neessary . On the other hand, w e will also see that the resulting p erformane degradation, in terms of b oth o ded and uno ded bit error rate (BER), an b e negligible ev en for v alues of B ′ that are signian tly smaller than V + 1 . In the follo wing, w e onsider a MIMO-OFDM system with D = N = 512 , M R = 4 , and either M T = 2 or M T = 4 , op erating o v er a frequeny-seletiv e hannel with L = 15 . The data sym b ols are dra wn from a 16-QAM onstellation. In the o ded ase, a rate 1 / 2 on v olutional o de with onstrain t length 7 and generator p olynomials [133 o 171 o ] is used. The reeiv er p erforms maxim um-lik eliho o d detetion through hard-output sphere deo ding. Our results are obtained through Mon te Carlo sim ulation, where a v eraging is p erformed o v er the hannel impulse resp onse taps H 0 , H 1 , . . . , H L assumed i.i.d. C N (0 , 1 / ( L + 1)) . This assumption on the hannel statistis, along with the a v erage transmit p o w er b eing giv en b y E [ c H n c n ] = 1 and the noise v ariane σ 2 w , implies that the p er-an tenna reeiv e signal-to-noise ratio (SNR) is 1 /σ 2 w . The reeiv er emplo ys either Algorithm I or Algorithm I I to ompute Q ( s n ) and R ( s n ) at all tones. W e assume that in Step 1 of b oth algorithms, H ( s ) ∼ (0 , L ) is in terp olated exatly from B = L + 1 = 16 equidistan t base p oin ts b y FIR ltering. Sine 0 = V 1 6 = V 2 = L , the orresp onding in terp olation omplexit y p er target p oin t is obtained from ( 62 ) as c IP , H , ( L + 1) χ C / 2 . With χ C = 1 / 4 , as assumed in Setion 8.1 , w e get 8 c IP , H = 2 . In Step 4 of Algorithm I I, w e in terp olate ˜ Q ( s ) ∼ ( M T L, M T L ) and ˜ R ( s ) ∼ ( M T L, M T L ) , with maxim um degree V = 2 M T L , through FIR ltering from B ′ ≤ B = 2 ⌈ log( V +1) ⌉ base p oin ts. With V 1 = V 2 = M T L , the orresp onding in terp olation omplexit y p er target p oin t is obtained from (64 ) as c IP , ˜ Q ˜ R , χ R B ′ / 2 with χ R = 1 / 8 , as assumed in Setion 8.1 . W e ensure that systemati in terp olation errors are the sole soure of detetion p erformane degradation b y p erforming all omputations in double-preision oating-p oin t arithmeti. Under inexat in terp olation, for ev ery v alue of B ′ < V + 1 w e determine the v alue of V ′ 1 that minimizes the in terp olation error e ( F 0 ) in (65) aording to the pro edure desrib ed in Setion 8.5 . 8 P erforming in terp olation of H ( s ) b y FFT w ould lead to c IP , H aording to (59 ), whi h with B = 16 and R = N/B = 32 results in c IP , H = 64 / 31 ≈ 2 . 06 . Hene, in this ase in terp olation of H ( s ) b y FIR ltering and b y FFT ha v e omparable omplexit y . 40 T able 2: Sim ulation parameters M T B ′ V ′ 1 c IP , ˜ Q ˜ R C I I /C I In terp olation metho d 2 64 30 3 . 43 0 . 74 FFT, exat 2 64 30 4 0 . 82 FIR ltering, exat 2 32 27 2 0 . 55 FIR ltering, inexat 2 16 25 1 0 . 41 FIR ltering, inexat 2 12 23 0 . 75 0 . 37 FIR ltering, inexat 2 8 21 0 . 5 0 . 34 FIR ltering, inexat 4 128 6 0 4 . 67 1 . 08 FFT, exat 4 128 6 0 8 1 . 54 FIR ltering, exat 4 32 50 2 0 . 71 FIR ltering, inexat 4 24 48 1 . 5 0 . 64 FIR ltering, inexat 4 16 42 1 0 . 57 FIR ltering, inexat 4 8 31 0 . 5 0 . 50 FIR ltering, inexat Common to all sim ulations are the parameters D = N = 512 , L = 15 , M R = 4 , and c IP , H = 2 . T able 2 summarizes the sim ulation parameters, along with the orresp onding v alues of the in terp olation omplexit y p er target p oin t c IP , ˜ Q ˜ R and the resulting algorithm omplexit y ratio C I I /C I , whi h quan ties the sa vings of Algorithm I I o v er Algorithm I. The v alues of C I I /C I for the ase where ˜ Q ( s ) and ˜ R ( s ) are in terp olated exatly b y FFT are pro vided for referene. W e note that for M T = 4 , exat in terp olation, b oth FFT-based and through FIR ltering, results in C I I > C I . Hene, in this ase inexat in terp olation is neessary to obtain omplexit y sa vings of Algorithm I I o v er Algorithm I. In on trast, for M T = 2 , Algorithm I I exhibits lo w er omplexit y than Algorithm I ev en in the ase of exat in terp olation. Figs. 3 a and 3b sho w the resulting BER p erformane for M T = 2 and M T = 4 , resp etiv ely , b oth for the o ded and the uno ded ase. F or uno ded transmission and inexat in terp olation, w e observ e an error o or at high SNR whi h rises with dereasing B ′ . F or M T = 2 and uno ded transmission, w e an see in Fig. 3a and T able 2, resp etiv ely , that an in terp olation lter length of B ′ = 8 results in negligible p erformane loss for SNR v alues of up to 18 dB, and yields omplexit y sa vings of Algorithm I I o v er Algorithm I of 66%. Cho osing B ′ = 16 yields lose-to-optim um p erformane for SNR v alues of up to 24 dB and omplexit y sa vings of 59%. F or M T = 4 and uno ded transmission, Fig. 3b and T able 2 sho w that the in terp olation lter length an b e shortened from B ′ = 128 to B ′ = 8 , leading to omplexit y sa vings of Algorithm I I o v er Algorithm I of 50%, at virtually no p erformane loss in the SNR range of up to 21 dB. Setting B ′ = 32 results in a p erformane loss, ompared to exat in terp olation, of less than 1 dB at BER = 10 − 6 and in omplexit y sa vings of 29%. In the o ded ase, b oth for M T = 2 and M T = 4 , w e an see in Figs. 3 a and 3b that the BER urv es for Algorithm I I, for all v alues of B ′ under onsideration, essen tially o v erlap with the 41 SNR [dB] Bit Error Rate 0 6 12 18 24 30 36 10 -6 10 -5 10 -4 10 -3 10 -2 10 -1 10 0 exact SNR [dB] Bit Error Rate 0 6 12 18 24 30 36 10 -6 10 -5 10 -4 10 -3 10 -2 10 -1 10 0 exact (a) (b) Figure 3: Bit error rates as a funtion of SNR for dieren t in terp olation lter lengths, with and without hannel o ding, for (a) M T = 2 and (b) M T = 4 . The results orresp onding to exat QR deomp osition are pro vided for referene. orresp onding urv es for Algorithm I for BERs do wn to 10 − 6 . This observ ation suggests that for a giv en target BER and a giv en tolerated p erformane loss of Algorithm I I o v er Algorithm I, the use of hannel o ding allo ws to emplo y signian tly shorter in terp olation lters (orresp onding to a smaller c IP , ˜ Q ˜ R and hene to a lo w er C I I , whi h in turn implies higher sa vings of Algorithm I I o v er Algorithm I) than in the uno ded ase. W e onlude that in the pratially relev an t ase of o ded transmission, omplexit y sa vings of Algorithm I I o v er Algorithm I an b e obtained at negligible detetion p erformane loss. 9.2. A lgorithm Complexity Comp arisons The disussion in Setion 8 and the n umerial results in Setion 9.1 demonstrated that for the ase of upsampling from equidistan t base p oin ts, small v alues of c IP an b e a hiev ed and inexat in terp olation do es not neessarily indue a signian t detetion p erformane loss. Therefore, in the follo wing w e assume that for all k = 1 , 2 , . . . , M T , the set I k is su h that S ( I k ) on tains B k = |I k | = 2 ⌈ log 2 (2 kL +1) ⌉ base p oin ts that are equidistan t on U , and assume that c IP = 2 . The latter assumption is in line with the v alues of c IP , H and c IP , ˜ Q ˜ R found in Setion 9.1 . F or D = 500 , L = 1 5 , and dieren t v alues of M T and M R , Fig. 4a sho ws the omplexit y of Algorithms I I and I I I as p eren tage of the omplexit y of Algorithm I. W e observ e sa vings of Algorithms I I and I I I o v er Algorithm I as high as 48% and 62%, resp etiv ely . F urthermore, w e an see that Algorithm I I I exhibits a lo w er omplexit y than Algorithm I I in all onsidered ongurations. W e note that the latter b eha vior is a onsequene of the small v alue of c IP and of Algorithm I I I, with resp et to Algorithm I I, trading a lo w er QR deomp osition ost against a higher in terp olation ost. Moreo v er, w e observ e that the sa vings of Algorithms I I and I I I o v er Algorithm I are more pronouned for larger M R − M T . F or the sp eial ase 42 Complexity (in % of Alg. I) 2 3 4 5 6 30 40 50 60 70 80 90 100 Complexity (in % of Alg. I) 2 3 4 5 6 30 40 50 60 70 80 90 100 (a) (b) Figure 4: Complexit y of Algorithms I I and I I I as p eren tage of omplexit y of Algorithm I for D = 500 , and L = 15 , (a) inluding and (b) exluding the omplexit y of in terp olation of H ( s ) . E = D , where in terp olation of H ( s ) is not neessary and Algorithm I simplies to the omputation of D QR deomp ositions, Fig. 4 b sho ws that the relativ e sa vings of Algorithms I I and I I I o v er Algorithm I are somewhat redued, but still signian t. W e an therefore onlude that in terp olation-based QR deom- p osition, pro vided that the omplexit y of in terp olation is suien tly small, yields fundamen tal omplexit y sa vings. F or D = 5 00 , M T = M R , and dieren t v alues of L , Fig. 5 a sho ws the omplexit y of Algorithms I I-MMSE and I I I-MMSE as p eren tage of the omplexit y of Algorithm I-MMSE. The fat (whi h also arries o v er to the sa vings of Algorithms I I and I I I o v er Algorithm I) that the sa vings of Algorithms I I-MMSE and I I I-MMSE o v er Algorithm I-MMSE are more pronouned for smaller v alues of L is a onsequene of B k b eing an inreasing funtion of L . In Fig. 5a, w e an see that despite the lo w in terp olation omplexit y implied b y c IP = 2 , Algorithm I I I-MMSE ma y exhibit a higher omplexit y than Algorithm I I-MMSE. This is a onsequene of the fat that for some v alues of M T , M R , and L , the o v erall omplexit y of the UT- based QR deomp ositions with standard form (49 ) required in Algorithm I I I-MMSE is larger than the o v erall omplexit y of the eien t UT-based regularized MMSE-QR deomp ositions with standard form ( 51) required in Algorithm I I-MMSE. Finally , Fig. 5 b sho ws the absolute omplexit y of Algorithms II I I and I-MMSE through I I I-MMSE as a funtion of D , for M T = 3 , M R = 4 , and L = 1 5 . W e observ e that the omplexit y sa vings of Algorithms I I and I I I o v er Algorithm I and the sa vings of Algorithms I I-MMSE and I I I-MMSE o v er Algorithm I-MMSE gro w linearly in D . This b eha vior w as predited for Algorithms I and I I b y the analysis in Setion 6.4 , where w e sho w ed that C I − C I I is an ane funtion of D and is p ositiv e for small c IP and large D . 43 Complexity (in % of Alg. I -MMSE) 2 3 4 5 6 30 40 50 60 70 80 90 100 110 120 Alg. II-MMSE Alg. III-MMSE Complexity (in t h ousands of full multiplications) 192 256 320 384 448 512 0 10 20 30 40 50 60 70 80 Alg. I-MMSE Alg. I Alg. II-MMSE Alg. II Alg. III-MMSE Alg. III (a) (b) Figure 5: (a) Complexit y of Algorithms I I-MMSE and I I I-MMSE as p eren tage of omplexit y of Algorithm I-MMSE for D = 500 and L = 15 . (b) Absolute omplexit y of Algorithms II I I and I-MMSE through I I I-MMSE, for M T = 3 , M R = 4 , and L = 15 . 10. Conlusions and Outlo ok On the basis of a new result on the QR deomp osition of LP matries, w e form ulated in terp olation-based algorithms for omputationally eien t QR deomp osition of p olynomial matries that are o v ersampled on the unit irle. These algorithms are of pratial relev ane as they allo w for an (often drasti) redution of the reeiv er omplexit y in MIMO-OFDM systems. Using a omplexit y metri relev an t for VLSI implemen tations, w e demonstrated signian t and fundamen tal omplexit y sa vings of the prop osed new lass of algorithms o v er brute-fore p er-tone QR deomp osition. The sa vings are more pronouned for larger n um b ers of data-arrying tones and smaller hannel orders. W e furthermore pro vided strategies for lo w-omplexit y in terp olation exploiting the sp ei struture of the problem at hand. The fat that the maxim um degree of the LP matries ˜ Q ( s ) and ˜ R ( s ) is 2 M T L , although the p olynomial MIMO transfer funtion matrix H ( s ) has maxim um degree L , giv es rise to the follo wing op en questions: • Is the mapping M optimal in the sense of deliv ering LP matries with the lo w est maxim um degree? • W ould in terp olation-based algorithms for QR deomp osition that expliitly mak e use of the unitarit y of Q ( s ) allo w to further redue the n um b er of base p oin ts required and hene lead to further omplexit y sa vings? A dditional hallenges inlude the extension of the ideas presen ted in this pap er to sparse hannel impulse resp onses, for whi h only few of the impulse resp onse tap matries are nonzero. 44 A kno wledgmen ts The authors w ould lik e to thank Andreas Burg and Simon Haene for man y inspiring and helpful disus- sions, Jan Hansen and Moritz Borgmann for their on tributions in early stages of this w ork, and Gerhard Doblinger for bringing [15 ℄ to their atten tion. Referenes [1℄ M. Borgmann, H. Bölsk ei, In terp olation-based eien t matrix in v ersion for MIMO-OFDM reeiv ers, in: Pro . Asilomar Conf. Signals, Syst., Comput., P ai Gro v e, CA, 2004, pp. 19411947. [2℄ E. O. Brigham, The F ast F ourier T ransform, Pren tie Hall, Englew o o d Clis, NJ, 1974. [3℄ A. Burg, VLSI Ciruits for MIMO Comm uniation Systems, v ol. 169 of Series in Miro eletronis, Hartung-Gorre, K on- stanz, German y , 2006, Ph.D. thesis, ETH Zuri h. [4℄ L. M. Da vis, Saled and deoupled Cholesky and QR deomp ositions with appliation to spherial MIMO detetion, in: Pro . IEEE Wireless Comm un. Net w. Conf. (W CNC), New Orleans, LA, 2003, pp. 326331. [5℄ U. Fin k e, M. P ohst, Impro v ed metho ds for alulating v etors of short length in a lattie, inluding a omplexit y analysis, Math. Comp. 44 (170) (1985) 463471. [6℄ G. H. Golub, C. F. V an Loan, Matrix Computations, 3rd ed., Johns Hopkins Univ. Press, Baltimore, MD, 1996. [7℄ S. Haene, A. Burg, N. F elb er, W. Fi h tner, OFDM hannel estimation algorithm and ASIC implemen tation, in: Pro . IEEE In t. Conf. Ciruits and Syst. Comm un. (ICCSC), Bu harest, Romania, 2006, pp. 270275. [8℄ B. Hassibi, An eien t square-ro ot algorithm for BLAST, in: Pro . IEEE In t. Conf. A oust., Sp ee h, Signal Pro ess. (ICASSP), v ol. 2, Istan bul, T urk ey , 2000, pp. 737740. [9℄ R. A. Horn, C. R. Johnson, Matrix Analysis, Cam bridge Univ. Press, Cam bridge, U.K., 1985. [10℄ H. Kaeslin, Digital In tegrated Ciruit Design, Cam bridge Univ. Press, Cam bridge, U.K., 2008. [11℄ V. Lefèvre, Multipliation b y an in teger onstan t, T e h. Rep. RR-4192, INRIA (Ma y 2001). [12℄ G. Ligh tb o dy , R. W o o ds, R. W alk e, Design of a parameterizable silion in telletual prop ert y ore for QR-based RLS ltering, IEEE T rans. VLSI Syst. 11 (2003) 659678. [13℄ A. J. P aulra j, R. U. Nabar, D. A. Gore, In tro dution to Spae-Time Wireless Comm uniations, Cam bridge Univ. Press, Cam bridge, U.K., 2003. [14℄ D. P erels, S. Haene, P . Luethi, A. Burg, N. F elb er, W. Fi h tner, H. Bölsk ei, ASIC implemen tation of a MIMO-OFDM transeiv er for 192 Mbps WLANs, in: Pro . IEEE Eur. Solid-State Ciruits Conf. (ESSCIR C), Grenoble, F rane, 2005, pp. 215218. [15℄ D. P . Skinner, Pruning the deimation-in-time FFT algorithm, IEEE T rans. A oust., Sp ee h, Signal Pro ess. 24 (2) (1976) 193194. [16℄ C. Studer, A. Burg, H. Bölsk ei, Soft-output sphere deo ding: Algorithms and VLSI implemen tation, IEEE J. Sel. Areas Comm un. 26 (2) (2008) 290300. [17℄ E. Viterb o, E. Biglieri, A univ ersal deo ding algorithm for lattie o des, in: Pro . GRETSI Symp. Signal and Image Pro ess., Juan-les-Pins, F rane, 1993, pp. 611614. [18℄ J. V older, The CORDIC trigonometri omputing te hnique, IRE T rans. Eletron. Comput. EC-8 (3) (1959) 330334. [19℄ J. S. W alther, The story of unied CORDIC, Klu w er J. VLSI Signal Pro ess. 25 (2000) 107112. [20℄ C. Windpassinger, R. F. H. Fis her, T. V enel, J. B. Hub er, Preo ding in m ulti-an tenna and m ulti-user omm uniation, IEEE T rans. Wireless Comm un. 3 (4) (2004) 13051316. 45 [21℄ P . W olniansky , G. F os hini, G. Golden, R. V alenzuela, VBLAST: An ar hiteture for realizing v ery high data rates o v er the ri h-sattering wireless hannel, in: Pro . URSI Symp. Signals, Syst., Eletron. (ISSSE), Pisa, Italy , 1998, pp. 295300. [22℄ D. Wübb en, K.-D. Kammey er, In terp olation-based suessiv e in terferene anellation for p er-an tenna-o ded MIMO- OFDM systems using P-SQRD, in: Pro . IEEE W orkshop Smart An tennas, Ulm, German y , 2006. 46
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment