The adjusted Viterbi training for hidden Markov models
The EM procedure is a principal tool for parameter estimation in the hidden Markov models. However, applications replace EM by Viterbi extraction, or training (VT). VT is computationally less intensive, more stable and has more of an intuitive appeal…
Authors: J"uri Lember, Alexey Koloydenko
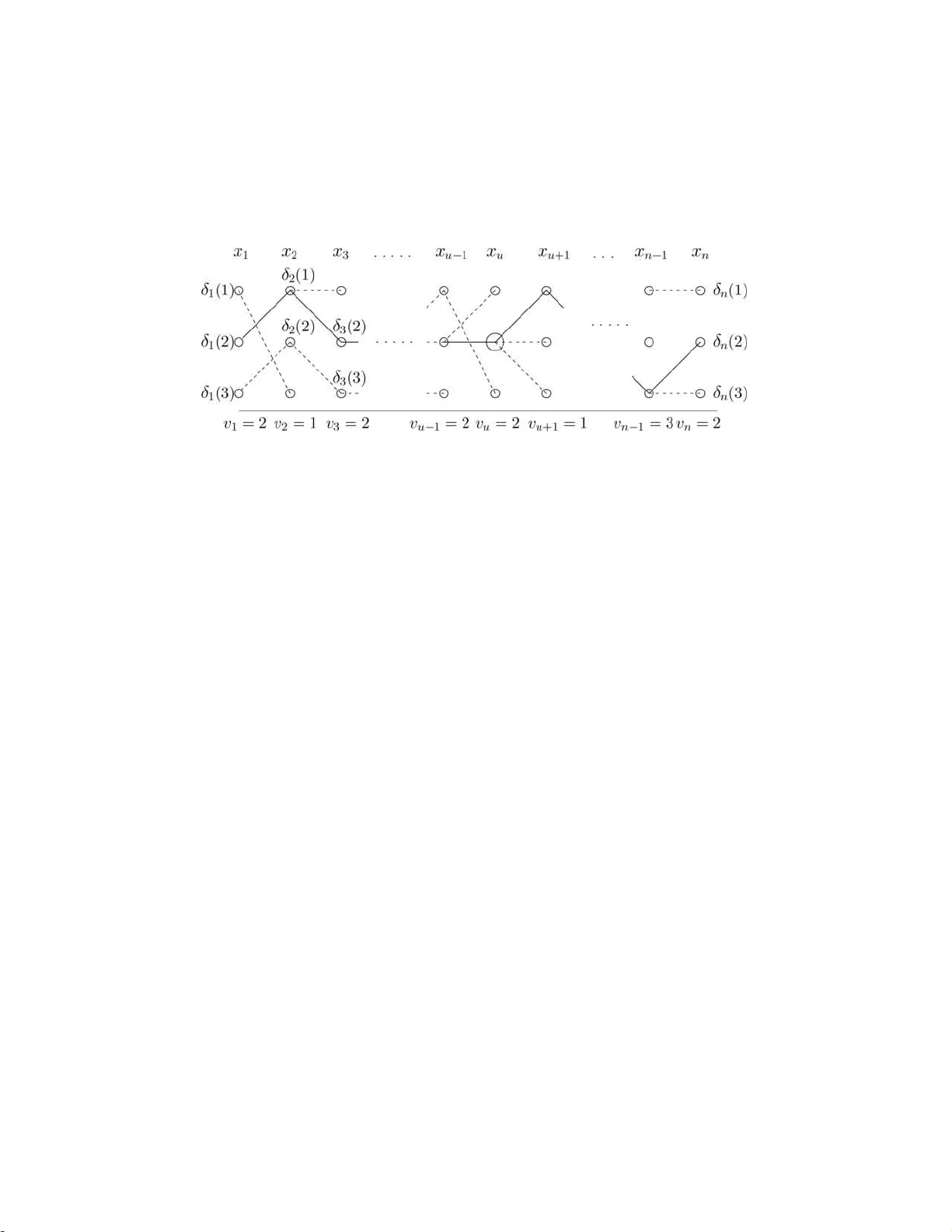
Bernoul li 14 (1), 2008, 180–206 DOI: 10.315 0/07-BEJ 105 The adjusted Viterbi training for hidden Mark o v mo dels J ¨ URI LEMBER 1 and ALEXEY K OLOYDENK O 2 1 T art u University, Liivi 2-50 7, T artu 50409 , Estonia. E-mail: jyril@ut.e e 2 Division of St atistics, University of Nott ingham, Nottingham NG7 2RD, UK. E-mail: alexey.koloydenko @nottingham.ac.uk The EM pr o c e dur e is a principal to ol for parameter estimation in the hidden Mark ov mo dels. How ever, applications replace EM by Viterbi extr action , or tr ai ning (VT). V T is computationally less intensiv e, more stable and has more of an in tu itiv e app eal, but VT estimati on is biased and does n ot satisfy the follo wing fixe d p oint pr op erty . Hyp othetically , giv en an infinitely large sample and initializ ed to th e true parameters, VT will generally mov e aw ay from the initial v alues. W e prop ose adjuste d Viterbi tr aining (V A), a new method to restore the fixed p oin t prop erty and thus alleviate t he ov erall imprecision of the VT estimato rs, whil e preserving the computatio nal adv antages of the baseline VT algorithm. Simulations elsewhere ha ve shown th at V A appreciably impro ves th e precision of estimation in b oth th e sp ecial case of mixture mo dels and more general HMMs. H ow ever, being en tirely analytic, the V A correction relies on infinite Viterbi alignments and associated limiting probability distributions. Wh ile explicit in the mixture case, the existence of these limiting measures is not ob v ious for more general HMMs. This p aper pro ves that under certain mild conditions, t h e required limiting d istri butions fo r general HMMs do exist. Keywor ds: Baum–W elc h; bias; computational efficiency; consis tency; EM; hidden Marko v models; maxim um likel ihoo d; parameter estimatio n; Viterbi extraction; Viterbi training 1. In tro duction Hidden Ma r k ov mo dels (HMMs) hav e b een called “ one of the most successful statistical mo delling ideas that ha ve [emerged] in the last forty years” [ 8 ]. Since their classica l application to digital comm unication in 1960s (see further references in [ 8 ]), HMMs ha ve had a defining impact on the mainstream technologies of speech recognition [ 18 , 1 9 , 20 , 32 , 35 , 38 , 40 , 41 , 46 , 47 , 48 ] and, more recently , bioinformatics [ 11 , 12 , 25 ]. Natural language [ 21 , 36 ], imag e [ 30 ] and more g eneral spatial [ 17 ] mo dels are only a few of the n umerous other a pplications o f HMMs. Applications of HMMs inev ita bly face the problem of parameter estimation. Let us consider estimation of para meters of a finite-state hidden Mar k ov mo del (HMM) giv e n observ ations x 1: n = x 1 , . . . , x n on X 1: ∞ = X 1 , X 2 , . . . , the observ able pro cess of the HMM, This is an electronic reprint of the original article published by the ISI/BS in Bernoul l i , 2008, V ol. 14, No. 1, 180– 206 . This reprint differs from the original in pagination and typographic detail. 1350-7265 c 2008 ISI/BS The adjuste d Viterbi tr aining for hid den Marko v mo dels 181 up to time n . F or any real application, X i can b e a ssumed to take on v alues in X = R D for some suitable D . Let Y 1: ∞ = Y 1 , Y 2 , . . . , the hidden la y er of the HMM, b e a (tim e- homogeneous) Marko v chain (MC) with state space S = { 1 , . . . , K } , tra nsition matrix P = ( p ij ) and initial distribution π = π P . T o every state l ∈ S , there c o rresp onds an emission distr ibution P l ( θ l ) with dens ity f l that is known up to the par ametrization f l ( x ; θ l ), θ l ∈ Θ l , where Θ l are ra ther general domains in R d . When Y k , k ≥ 1 , is in state l , an observ a tion x k on X k is emitted according to P l ( θ l ) a nd independent of ev er ything else. The Y 1: ∞ pro cess is also called a r e gime [ 31 ]. The maximum likeliho o d (ML) a p- proach has b ecome standard for estimation of ψ = ( P , θ ), the HMM parameters, where θ = ( θ 1 , θ 2 , . . . , θ K ). In part, this has b een due to the w ell-known theoretical prop erties of (lo cal) c onsistency a nd asymptotic normality generally enjoy ed by the ML estimators (MLE). Perhaps a mor e significant reason for the widespread u se o f the ML approach has been the av ailability of the EM algorithm with its computationally efficien t imple- men tation kno wn as the Baum–Welch o r simply Baum , o r forwar d–b ackwa r d algorithm [ 1 , 2 , 8 , 14 , 20 , 39 , 40 ]. Since EM can, in practice, b e slo w o r co mputationally exp ensiv e, it is commonly re- placed by V iterbi ext r action , or t r aining (VT), also known as the Baum–Viterbi algo- rithm. VT app ears to hav e b een in tro duced in [ 19 ] by F. J elinek and his colleagues at IBM in the con text o f spe e c h r ecognition, in which it has b een used extensiv ely e ver since [ 14 , 18 , 32 , 35 , 40 , 41 , 4 6 , 47 , 48 ]. Its computational stability (i.e., ra pid exit) and in tuitiv e app e a l [ 14 ] hav e also made VT p opular in natural language mo deling [ 36 ], im- age analysis [ 30 ] and bioinformatics [ 4 , 11 , 13 , 25 , 37 ]. VT is also related to constrained vector quan tization [ 10 ]. The main idea o f the metho d is to replace the computationa lly costly exp ectation (E-s tep) of the E M algorithm with an appropria te maximiza tion step that generally req uires less intensiv e computer op erations (otherwise, the t wo algorithms scale as K 2 n ). In sp eech recognition, e s sen tially the same training pro cedure was also describ ed b y L. Rabiner et al. in [ 22 , 41 ] (see a lso [ 39 , 40 ]) as a v aria tion o f the Lloyd al- gorithm used in v ector quantization. In that context, VT has gained the name se gmental K-me ans [ 14 , 22 ]. The analogy with vector quantization is esp ecially pro nounced when the underlying c ha in is triv ia lized to i.i.d. v aria bles, th us pro ducing a n i.i.d. sample from a mixture distribution. F or such mixture mo dels, VT was also describ ed b y R. Gray et al. in [ 10 ], where the training a lgorithm was consider ed in the vector quantization context under the name entr opy c onstr aine d ve ctor quantization (ECVQ) . A b etter-known name for VT in the mixture case is classific ation EM (CEM) [ 9 , 15 ], s tr essing tha t instead of the mixture likelihoo d, CE M maximizes the classific ation likel iho o d [ 4 , 9 , 15 , 33 ]. VT- CEM was also pa rticularly suitable for the ear ly effo r ts in image segmen tation [ 44 , 4 5 ]. Also, for the uniform mixture of Gaussians with a common cov ariance matrix of the fo rm σ 2 I (where I is the K × K identit y matrix) and unknown σ , VT, or CEM, is equiv alent to the k- m e ans clus t ering [ 9 , 10 , 15 , 43 ]. 1.1. VT estimation and relev ance of V A to real applications The VT algorithm for estimation o f ψ can be describ ed as follows. Start with some initial v alues ψ (0) = ( P (0) , θ (0) ) a nd (use the Viterbi algorithm to) find a realization of 182 J. L emb er and A. Koloydenko Y 1: n that maximizes the lik eliho o d of the given observ a tions. An y suc h n -tuple of states is called a Viterbi , or for c e d, alignment . An alignment partitions the orig inal sample x 1: n in to subsamples corresp onding to distinct states. If reg arded as an i.i.d. sample from P l ( θ l ), the subsample corres ponding to state l gives rise to ˆ µ n l , the maximum likelihoo d estimate (MLE) of θ l , l ∈ S . At step m + 1 , these estimates replace θ ( m ) . The transition probabilities are s imilarly estimated (by MLE) from the curr en t alignment . The up dated parameters ψ ( m +1) are s ubse quen tly used to obta in a new alignmen t, and so on. It can be sho wn that, in gener al, ψ ( m ) conv erg es (to some ψ ∗ ( x 1: n , ψ (0) )) in finitely man y steps m [ 22 ]; also, it is usually m uch faster than the Baum algorithm. Note that when each f l is modelled a s a mixture, which is common in audio and visual processing , VT can be applied at b oth stages of this mo del – firs t, in its genera l form (i.e., as with f l general) a nd then in its CEM fo r m to learn each individual f l . Alternatively , the orig inal HMM ca n, from the very b eginning, be replaced b y the equiv alent o ne with hidden states ( l , s ( l )), where s ( l ) indicates the (sub)component of f l . VT can then also be applied to this new HMM as, for exa mple, has b een done in the Philips sp eec h recognition sys tem [ 35 ]. Despite its attractiveness, VT can be challenged, a s its estimator s are gener a lly biased and not consisten t. This has been noted, at leas t in the case of mixtures, since [ 4 ], with a sp ecific caveat issued in [ 49 ]. Sim ula tions in [ 27 ] and [ 24 ] illustrate apprecia ble biases in VT estimation in the i.i.d. and more general HMM settings, resp ectively . A t the same time, these facts are not surprising. Indeed, unlik e EM, whic h increases the likelihoo d of ψ giv en x 1: n , VT increases the join t likelihoo d of the (hidden) state sequence y 1: n and the pa rameters ψ , g iv en x 1: n . According to [ 34 ], under certain conditions, the difference betw een the t wo o b jectiv e functions v anishes as D , the dimension o f the emission X i , grows sufficiently large relative to log( K ), whic h can b e r e alistic in isolate d wor d r e c o gni- tion [ 34 ]. How ever, as later clarified in [ 14 ], this do es not imply closeness o f the parameter estimates obtained by EM and VT (unless the algorithms are initialized identically) since bo th p erform a loca l, rather than global, optimization. Certainly , unbiasedness a nd consistency a re neither necessar y nor sufficien t for a pro- cedure to perform w ell in applications [ 45 ]. How ever, there are indications that some applications, such as se gment-b ase d sp e e ch r e c o gnition [ 46 ], do prefer the standar d, that is, EM- t yp e, likelihoo d maximization. Also , [ 46 ] notes that c onventional sp e e ch r e c o gniz- ers would prefer the ‘smoo ther conv erge nce ’ of ψ ( m ) under EM, presuma bly over the more a brupt, greedy convergence of ψ ( m ) under VT. A t the same time, it app ears that in complex en vir onmen ts, VT can be appreciably simpler to implemen t than EM [ 46 ]. Hence, it appear s to b e sensible to combine the simplicity of VT’s implementation with the desirable pr operties of EM. Indeed, there are v ar iations of VT that use mo r e than one bes t a lignmen t or several per turbations of the b est a lig nmen t [ 36 ]. V A, our type of adjusted VT, is of a different nature as it improv es the estimation precision b y means of analytic calculations and do es not compute more than one optimal alignmen t per iteration. Moreov er, w e suggest that in vestigating suc h alternatives to VT and E M for real applications is now adays m uch more appealing than ev er befor e, thanks to the abundance of vir tually infinite and freely av a ilable streams of a udio and video (e.g., r e a l-time broadcasting) as w ell as biological data. Actually , practitioners hav e already realized this by shifting from entirely The adjuste d Viterbi tr aining for hid den Marko v mo dels 183 supe r vised to semi- and unsup ervised modes of training [ 50 ]. One na ¨ ıve realization of these ideas is to simply use the estimates obtained from a lab eled s ample (i.e., with y 1: n known) as the initial guess ψ (0) for a further unsupe r vised retraining. A mo re dedicated application w ould be mo del adaptation , wherein the mo del ψ (0) (initially trained in any mo de) may need to be adapted to a new environmen t (e.g., spea k er ) differing fro m the original one mos tly , or only , b y the emission parameters. Applicabilit y of our adjusted VT for mixture mo dels and situations when the transition probabilities ar e either known or nuisance is further discussed in Section 2.3 . Finally , simulations in [ 27 ] a nd [ 24 ] clea rly show that V A, our metho d of adjusting VT, does significantly impro ve the precision o f VT estimation. In those experiments, the V A e s timates ar e always compara ble to the E M estimates, while the V A algorithm is only margina lly mor e in tensive than the baseline VT algorithm. 1.2. The adjusted Viterbi tr ain ing a nd c ontribution of t his w ork Is it p ossible to adjust VT in an analytic w ay in order to enjoy b o th the desirable prop- erties of VT (f ast c on vergence of ψ ( m ) , ov er all computational feasibilit y , simplicity of implemen tation and an ov erall in tuitive app eal) a nd more consistent estimation? En- suring that an algorithm ha s the true p ar ameters as its asymptotic al ly fixe d p oint turns out to b e piv otal in constructing such adjusted estimators. Eviden tly , this fixed p oint prop ert y holds for EM, but not for VT. Namely , for a sufficien tly large sample, the EM algorithm ‘r ecognizes’ and ‘confirms’ the true par ameters. In cont rast to this, an itera- tion of VT generally disturbs the correc t v alues noticeably . In [ 27 ], w e hav e prop osed to mo dify VT in or der to make the true par a meters an asymptotically fixed p oin t o f V A, the resulting algorithm. In or der to understand V A, it is crucial to understand the as ympt otic b ehaviors of ˆ µ n l and ˆ p n ij , the maximum likeliho od estimators based on the Viterbi alignment. Since the alignment depends on ψ (0) , the initial v alues of the par ameters (and on the tie-breaking rule, which is ignor e d for the time b eing), so do ˆ µ n l ( ψ (0) , X 1: n ) and ˆ p n ij ( ψ (0) , X 1: n ). Note that, for ψ to b e asymptotically fixed by an estimation algor ithm, it means that if ψ = ( P , θ ) are the true par a meters and are used to compute the alignment, then ˆ µ n l ( ψ , X 1: n ) − → n →∞ θ l a.s. ∀ l ∈ S ; ˆ p n ij ( ψ , X 1: n ) − → n →∞ p ij a.s. ∀ ( i, j ) ∈ S 2 . (1.1) The reason why VT does not enjo y th e desir ed fixed point property is that ( 1.1 ) need not ho ld in g eneral [ 4 , 49 ]. Hence, in order to restor e the ab ov e fixed p oin t pro perty in VT, we need to v er ify that the sequences in ( 1.1 ) converge almo st surely and, provided they do, exhibit their limits. This pap er essen tially accomplishes these tasks. Namely , we show that (under certain mild conditions) the e mpirical measur es ˆ P n l ( ψ , X 1: n ) ob- tained via the Viterbi alignmen t do con verge w eakly to a cer tain limiting probabilit y measure Q l ( ψ ) ( 2.5 ) a nd that, in general, Q l ( ψ ) 6 = P l ( θ l ). In [ 24 ], we have s hown that under general conditions on the densities f l ( x ; θ l ) (and, for Θ l , closed subsets of R d ), the 184 J. L emb er and A. Koloydenko ab o ve con v ergence ˆ P n l ( ψ , X 1: n ) ⇒ n →∞ Q l ( ψ ) a.s. (properly int ro duced in ( 2.5 )) implies conv erg ence of ˆ µ n l , that is, ˆ µ n l ( ψ , X 1: n ) − → n →∞ µ l ( ψ ) a.s., where µ l ( ψ ) def = arg max θ ′ l ∈ Θ l Z ln f l ( x ; θ ′ l ) Q l (d x ; ψ ) . (1.2) Since, in general, Q l ( ψ ) 6 = P l ( θ l ), clea rly µ l ( ψ ) need not equal arg max θ ′ l R ln f l ( x ; θ ′ l ) × P l (d x ; θ l ). In order to obtain the above results, in Section 4 , w e extend Viterbi alignmen ts, or paths, ad infinitum. Namely , considering (finite) Viterbi alignments with tie-brea king rules of a sp ecial kind, we prove the exis tence of a decoding v : X ∞ → S ∞ such that, for almost every realization x 1: ∞ , the f ollowing property holds: for every m ∈ N , there exists a n n = n ( x 1: ∞ , m ) ∈ N , n > m , s uc h that the co deword v ( x 1: ∞ ) and the Vit erbi alignment based on x 1: n agree up to time m . T o emphasize the dependence of v on ψ , we will write v ( x 1: ∞ ; ψ ). It can then also b e shown that when ψ are the true parameters, the proces s V def = v ( X 1: n ; ψ ) is r egenerative. In particular, for any i , j ∈ S, there exists q ij ( ψ ) ≥ 0 suc h that P j q ij ( ψ ) = 1 for every i ∈ S and ˆ p n ij ( ψ ; X 1: n ) a . s . − → n →∞ q ij ( ψ ) . (1.3) Again, in general, p ij 6 = q ij ( ψ ). Reduction of the biases µ l ( ψ ) − θ l and q ij ( ψ ) − p ij is the main feature of the adjusted Viterbi training. 1.3. Previous r elated w ork W e are not aw a r e of any sys tematic tr e a tmen t of asymptotic reduction of the bias in VT estimation (without compromising the adv antages of the VT algorithm over Baum– W elch) preceding [ 27 ]. In [ 23 ], how ever, a sequential version o f VT (‘the segmen ta l K- means algor ithm’) is sugges ted, which can allegedly reduce the estimation bias asymptot- ically . The suggested mo difica tion a ppears substantially different from our adjustmen t, although we ha ve b een unable to ev aluate the algo r ithm of [ 23 ] thoro ughly due to the lack of detail in its descr iption in [ 23 ] or anywhere else to date. Moreov er, to the b est of our knowledge, there has be e n no systematic study of asymp- totic prop erties of the Viterbi alignments to date b esides certain attempts made by Kogan in [ 23 ] in the con text o f the sequential v ersion of VT (see ab ov e) and, more recentl y , by Calieb e and R¨ osler in [ 7 ] a nd Calieb e in [ 5 ]. Both gro ups ha ve g iv en thorough treatments of certain s pecial cases, mostly K = 2, but this, as w e explain below, is to o sp ecial. Impo rtan tly , it was recognized in [ 23 ] that under certain conditions, longer Viterbi alignments can be obtained piecewise. Roug hly , the end-p oints of the pieces and the (random) times o f their occur rence were termed ‘special columns’ and ‘most informa tiv e stopping times’, resp ectiv ely . In [ 5 , 7 ], related notions of ‘meeting states’ and ‘meeting times’ are used. Independently of [ 5 , 7 , 23 ], we hav e built our theory on the notion of no des (roughly , observ ations emitted from the ‘special columns’; see Section 3.1 ) and the The adjuste d Viterbi tr aining for hid den Marko v mo dels 185 stopping times of their o ccurrence. If defined to b e indep enden t of a particular global tie-breaking rule, the meeting times of [ 5 ] w o uld corresp ond to ‘strong no des’ of order 0, a particular type of nodes. More impo rtan tly , ev en o ur (general) no des, which are essentially equiv alen t to the sp ecial columns of [ 23 ] and ‘path cross ing s’ o f [ 5 , 7 ], are not sufficiently gener al in the sense that HMMs with ap erio dic a nd irreducible Markov chains need not necessarily have specia l columns, or no des, infinitely often almost surely, despite the claim to the contrary made in Theorem 2 of [ 23 ] (stated without pro of a nd implicitly cited in [ 14 ]). F or a counterexample, w e refer to E xample 3 .11 in [ 26 ], a downloadable preprint of this pap er. Appropr iate s ufficien t conditions to guar an tee the desired prop ert y hav e also b een given in [ 26 ] for the first time. Implicitly , the alignmen t pro cess in [ 23 ] was r ecognized as regenerative with resp ect to the ‘most informative stopping times’. The limiting alignment proces s of [ 5 ] is alrea dy explicitly shown to b e reg enerativ e. Regenerativity with resp ect to (the times of ) no des is also essential for our purpose of exhibiting the limiting measur es Q l ( ψ ) ( 2.5 ) and q ij ( ψ ) ( 1.3 ). Conv erg ence of the Viterbi paths w as , to the b est of o ur knowl edge, first ser iously considered in [ 5 , 7 ], where the existence of infinite a lignmen ts for certain special cases, such as K = 2 and some HMMs with additiv e white Gaussian noise, was also prov en. While innov a tiv e, the main r e s ult of [ 7 ] (Theorem 2) makes several restrictive ass umptions preven ting its ex tension b ey ond the K = 2 case. As its by-pro duct, this work extends some, and cor rects other, results of [ 5 , 7 ]. This is explained in detail in the appropriate paragr aphs of Sections 3.1 – 3.3 and Section 4 . Also, note that our g oal of exhibiting Q l ( ψ ) and q ij ( ψ ) extends b ey o nd solely defini ng infinite Viterbi alignmen ts (the main goal of [ 7 ]). 1.4. Organization of the rest of the paper First, in Section 2 , we pro perly in tro duce the ba seline a nd adjusted Viterbi training pro- cedures (Section 2 .2 ) for HMMs. In Section 2.3 , the adjusted Viterbi training is discussed in the context of the following tw o imp ortant v ariations on the main situation: the regime parameters are known or nuisance. Mo re g eneral is sues of implementation are discussed in Section 2.4 . Sections 2.3 and 2 .4 can be skipp ed without interruption of th e main presentation. Recall that our ultimate goal has b een asymptotic reduction of the bias in VT estima- tion for a s genera l a class of HMMs as pos s ible. The main goal of this paper , howev er, is to prov e the existence of the limiting measures Q l ( ψ ) ( 2.5 ) and q ij ( ψ ) ( 1.3 ) that un- derpin our a pproach to achieving the ultimate goa l. A significan t effort has been made to achiev e this accurately and under as non-restrictive conditions as p ossible. This is the main reas o n why we ca nnot directly reuse the to ols us e d by o thers ([ 5 , 7 , 23 ]). As w e reit- erate further in Section 3 , the asymptotic b ehavior o f the Viterbi alignment is not trivial and do es require sp e c ial to ols. Th us, no des and b arriers , our main to ols, are presen ted in Sections 3.1 and 3.3 , respe ctiv ely . In Sectio n 3.2 , we explain o ur piecewise construction of the pr op er Viterbi alignments. This is s till at the level of individual rea lizations of the HMM pro cess. In Section 3.3 , barriers, on the other hand, extend our construction for 186 J. L emb er and A. Koloydenko almost ev ery realization o f the HMM pro cess. This is the essence of Lemmas 3.1 and 3.2 , the first of the t wo main re s ults of this paper. In Section 4 , we define V 1: ∞ , the pr op er infinite alignment pr o c ess . Fina lly , in the s ame section w e prov e the existence o f the mea- sures Q l ( ψ ) and q ij ( ψ ), our second main result, using r e g enerativit y of the aug mented pro cess ( V 1: ∞ , X 1: ∞ ) (Theorem 4.1 and Corollar y 4.1 ). Exhibiting the measures Q l ( ψ ) under v er y general conditions has nece s sitated several rather technical constructions, mainly used to prov e Lemmas 3.1 and 3 .2 . Due to spatial limitations, they a re no t given her e, but rather app ear in [ 26 ]. 2. The adjusted V ite rbi training 2.1. The mo del Recall that Y 1: ∞ takes v alues in S = { 1 , . . . , K } and has transition matrix P . Let Y 1: ∞ be irreducible and aper iodic, hence a unique π = π P exists. Let the emission distrib utions P l ( θ l ), l ∈ S , be defined on ( X , B ), where X a nd B are a separable metric space and the corresp onding Borel σ -algebra, resp ectiv ely . Let f l be the densit y of P l ( θ l ) with resp ect to a s uitable r eference meas ure λ o n ( X , B ). Definition 2.1. The sto chastic pr o c ess X is a hidden Markov mo del if ther e is a (me a- sur able) function h such that, for e ach n , X n = h ( Y n , e n ) , wh er e e 1 , e 2 , . . . ar e i. i.d. and indep endent of Y . (2.1) Hence, the emission distribution P l ( θ l ) is the distribution o f h ( l , e n ). The distribution of X is completely determined b y the regime para meters P and the emission distributions P l ( θ l ), l ∈ S . The proces s X is also α - mixing and, therefor e, erg odic [ 14 , 16 , 29 ]. 2.2. Viterbi alignmen t and training Let Λ( y 1: n ; x 1: n , ψ ) = P ( Y 1: n = y 1: n ) n Y i =1 f y i ( x i ; θ y i ) , where P ( Y 1: n = y 1: n ) = π y 1 n Y i =2 p y i − 1 y i , be the lik eliho o d functions of the y 1: n , treated as parameter s . Given x 1: n , let V ( x 1: n ; ψ ) be the set o f all maxim um-likeliho o d estimates of y 1: n . These estimates, or paths, ar e efficient ly obtained b y the Viterbi algorithm and are called the Viterbi alignments . The non-uniqueness of the alignmen ts causes substantial technical incon veniences. In Section 3.2 , we specify unique v ( x 1: n ; ψ ) ∈ V ( x 1: n ; ψ ) for every n ∈ N and x 1: n ∈ X n (and every ψ ) in a consistent manner that is suitable to prov e the existence o f Q l ( ψ ). Meanwhile, the uniqueness o f v ( x 1: n ; ψ ) is an assumption. VT estimation of ψ is defined formally as follows (where I A is the indicator function o f set A ): The adjuste d Viterbi tr aining for hid den Marko v mo dels 187 (1) choo se initial v alues for the parameters ψ ( k ) = ( P ( k ) , θ ( k ) ), k = 0 ; (2) given ψ ( k ) , curren t parameters, o bta in the alignment v ( k ) = v ( x 1: n ; ψ ( k ) ); (3) up date the regime parameters P ( k +1) def = ( ˆ p n ij ) as given b y ˆ p n ij def = P n − 1 m =1 I { i } ( v ( k ) m ) I { j } ( v ( k ) m +1 ) P n − 1 m =1 I { i } ( v ( k ) m ) , if n − 1 X m =1 I { i } ( v ( k ) m ) > 0 , P ( k ) ij , otherwise, i, j ∈ S ; (2.2) (4) as s ign x m , m = 1 , 2 , . . . , n , to class v ( k ) m and, equiv alently , define empirica l measures ˆ P n l ( A ; ψ ( k ) , x 1: n ) def = P n m =1 I A ×{ l } ( x m , v ( k ) m ) P n m =1 I { l } ( v ( k ) m ) , A ∈ B , l ∈ S ; (2.3) (5) for each cla ss l ∈ S , obtain ˆ µ n l ( ψ ( k ) , x 1: n ), MLE of θ l , given by ˆ µ n l ( ψ , x 1: n ) def = arg max θ ′ l ∈ Θ l Z ln f l ( x ; θ ′ l ) ˆ P n l (d x ; ψ, x 1: n ) (2.4) and for all l ∈ S , let θ ( k +1) l def = ˆ µ n l ( ψ ( k ) , x 1: n ) , if K X m =1 I { l } ( v ( x 1: n ; ψ ( k ) ) m ) > 0, θ ( k ) l , otherwise. T o b etter interpret VT, suppo s e that, at some step k , ψ ( k ) = ψ , th us v ( k ) is obtained using the true par ameters. Let y 1: n be the actual hidden realization of Y 1: n . The training ‘pretends’ that the a lignmen t v ( k ) is p erfect, that is, that v ( k ) = y 1: n . If the a lig nmen t were indeed perfect, then the empirical measures ˆ P n l , l ∈ S , would b e obtained fro m the i.i.d. samples gener a ted from P l ( θ l ) a nd the MLE ˆ µ n l ( ψ , X 1: n ) would b e natura l estimators to use. Under these assumptions, ˆ P n l ( ψ , X 1: n ) ⇒ P l ( θ l ) a s n → ∞ a.s. and, pro vided that { f l ( · ; θ l ) : θ l ∈ Θ l } is a P l -Glivenk o– C a n telli class and Θ l is equipp ed with a suitable metric, we would have lim n →∞ ˆ µ n l ( ψ , X 1: n ) = θ l a.s. Hence, if n is sufficien tly large, then ˆ P n l ( ψ , X 1: n ) ≈ P l ( θ l ) and θ ( k +1) l = ˆ µ n l ( ψ , x 1: n ) ≈ θ l = θ ( k ) l for every l ∈ S . Similar ly , if the alignment is per fect, then lim n →∞ ˆ p n ij ( ψ , X 1: n ) = P ( Y 2 = j | Y 1 = i ) = p ij , a.s . Th us, for the per fect alignment, ψ ( k +1) = ( P ( k +1) , θ ( k +1) ) ≈ ( P ( k ) , θ ( k ) ) = ψ ( k ) = ψ , that is, ψ w ould be (approximately) a fixed point of the training algor ithm. Certainly , the alignmen t, in general, is not p erfect, even when it is co mputed with the true parameters. In particular , the e mpir ic a l measur es ˆ P n l ( ψ , X 1: n ) can be rather far from those based on i.i.d. samples from P l ( θ l ). Hence, we hav e no rea son to expect that lim n →∞ ˆ µ n l ( ψ , X 1: n ) = θ l a.s. and lim n →∞ ˆ p n ij ( ψ , X 1: n ) = p ij a.s. Moreover, we do not even kno w wheth er the sequences of empirica l measures ˆ P n l ( ψ , X 1: n ), or MLE estimators ˆ µ n l ( ψ , X 1: n ) and ˆ p n ij ( ψ , X 1: n ), conv erg e almost surely at all. 188 J. L emb er and A. Koloydenko As stated in Theorem 4.1 , under certain mild conditions, there exist pr obabilit y mea- sures Q l ( ψ ), l ∈ S , such that ˆ P n l ( ψ , X 1: n ) = ⇒ n →∞ Q l ( ψ ) a.s. (2.5) F ro m the pro of of Theorem 4.1 , it also follows (Corollary 4.1 ) that for every i ∈ S , there exist probabilities q i 1 , . . . , q iK such that ( 1.3 ) holds. In general, µ l ( ψ ) 6 = θ l and q ij ( ψ ) 6 = p ij . In o rder to reduce the biases θ l − µ l ( ψ ) and p ij − q ij ( ψ ), w e ha v e pr o posed the adj uste d Viterbi t ra ining . Na mely , suppos e that ( 1.2 ) and ( 1.3 ) hold and consider the mappings ψ 7→ µ l ( ψ ) , ψ 7→ q ij ( ψ ) , l, i, j = 1 , . . . , K. (2.6) The functions in ( 2.6 ) do not depend on x 1: n , hence the following corrections are w ell defined: ∆ l ( ψ ) def = θ l − µ l ( ψ ) , R ij ( ψ ) def = p ij − q ij ( ψ ) , l , i, j = 1 , . . . , K. (2.7) Based on ( 2.7 ), the adjuste d Viterbi tr aining re pla ces VT steps (3) a nd (5) as given below: (3) for every i, j ∈ S , upda te the matrix P ( k +1) def = ( p ( k +1) ij ) accor ding to p ( k +1) ij def = ˆ p n ij + R ij ( ψ ( k ) ); (2.8) (5) for all l ∈ S , let θ ( k +1) l def = ∆ l ( ψ ( k ) ) + ˆ µ n l ( ψ ( k ) , x 1: n ) , if K X m =1 I { l } ( v m ) > 0 , θ ( k ) l , otherwise. Provided n is sufficiently lar ge, V A, as desired, has the true par a meters ψ as its (ap- proximately) fixed p oin t. Indeed, supp ose that ψ ( k ) = ψ . F rom ( 1.2 ), ˆ µ n l ( ψ ( k ) , x 1: n ) = ˆ µ n l ( ψ , x 1: n ) ≈ µ l ( ψ ) = µ l ( ψ ( k ) ) for all l ∈ S . Similarly , fro m ( 1.3 ), ˆ p n ij ( ψ ( k ) , x 1: n ) = ˆ p n ij ( ψ , x 1: n ) ≈ q ij ( ψ ) = q ij ( ψ ( k ) ) for all i, j ∈ S . Thus, θ ( k +1) l = ˆ µ n l ( ψ , x 1: n ) + ∆ l ( ψ ) ≈ µ l ( ψ ) + ∆ l ( ψ ) = θ l = θ ( k ) , l ∈ S, (2.9) p ( k +1) ij = ˆ p n ij ( ψ , x 1: n ) + R ij ( ψ ) ≈ q ij ( ψ ) + R ij ( ψ ) = p ij = p ( k ) ij , i, j ∈ S. (2.10) Hence, ψ ( k +1) = ( P ( k +1) , θ ( k +1) ) ≈ ( P ( k ) , θ ( k ) ) = ψ ( k ) . Example 1 (Mixtur es). Let X 1 , X 2 , . . . b e i.i.d. a nd follow a mixture distribution with densit y P K l =1 π l f l ( x ; θ l ) a nd (positive) mixing weigh ts π l . Such a sequence is an HMM with transition probabilities p ij = π j for all i, j ∈ S . In this specia l case, the a lignmen t The adjuste d Viterbi tr aining for hid den Marko v mo dels 189 and the measures Q l are eas y to exhibit. Indeed, for any set of para meters ψ = ( π, θ ), the alignmen t v ( x 1: n ; ψ ) can b e obtained v ia a generalized V or onoi p artition S ( ψ ) = { S 1 ( ψ ) , . . . , S K ( ψ ) } , where S 1 ( ψ ) = { x ∈ X : π 1 f 1 ( x ; θ 1 ) ≥ π j f j ( x ; θ j ) , ∀ j ∈ S } , (2.11) S l ( ψ ) = { x ∈ X : π l f l ( x ; θ l ) ≥ π j f j ( x ; θ j ) , ∀ j ∈ S }\ l − 1 [ k =1 S k ( ψ ) , l = 2 , . . . , K. (2.12) Now, the alignment ca n be defined p oin twi se as follows: v ( x 1: n ; ψ ) = ( v ( x 1 ; ψ ), . . . , v ( x n ; ψ )), where v ( x ; ψ ) = P K k =1 k I S k ( ψ ) ( x ), which returns l if and only if x ∈ S l ( ψ ). The conv ergence ( 2.5 ) no w follo ws immediately from the strong law of larg e n umbers. Indeed, if ψ are the true parameters and if the alignment is obtained based on ψ , then the SLL N immediately gives ˆ P n l ( ψ ) ⇒ Q l ( ψ ) almost surely , with densities q l ( x ; ψ ) of Q l ( ψ ) ∝ f ( x ; ψ ) I S l ( ψ ) = ( P K k =1 π k f k ( x ; θ k )) I S l ( ψ ) , l = 1 , 2 , . . . , K. Hence, the limit of the class-conditiona l MLE ˆ µ n l is giv en b y µ l ( ψ ) = a rg max θ ′ l ∈ Θ l Z S l ( ψ ) ln f l ( x ; θ ′ l ) K X k =1 π k f k ( x ; θ k ) ! λ (d x ) , (2.13) which , dep ending on the mo del, can differ from θ l significantly ([ 24 , 27 ]). Also, ( 1.3 ) follows easily in this case (see [ 27 ] for further details). Namely , note that ˆ π n l ( ψ , X 1: n ) a . s . − → n →∞ q l ( ψ ) = K X k =1 π k Z S l ( ψ ) f k ( x ; θ k ) λ (d x ) . (2.14) Thu s, in the sp ecial case of mixtures, the adjustmen ts ∆ l and R l are r elativ e ly easy to obtain and the adjusted Viterbi t raining is e a sy to implemen t. The sim ula tions in [ 27 ] hav e lar g ely supported the theory , demonstrating b oth the computational adv antage of V A o ver EM and the increased precision of V A relative to VT. 2.3. V A for ‘independen t t r ain ing’ Some a pplications, suc h as lar ge vocabulary sp eech recog nition systems [ 35 ], fix the regime para meters exogenously . With the appropriate simplifications, th e baseline and adjusted Viterbi training pro cedures, as well as the E M alg orithm, immediately apply in such situations. In fact, in [ 24 , 2 7 ], V A is discussed pr imarily in this simplified cont ext. It ca n then b e arg ued tha t, when the regime par a meters a re known, V A is unnecessar y as MLI , the maximum likelihoo d estimation under the indepe ndence assumption (whic h can also b e called indep endent t r aining ), applies. L et us discuss this issue in more detail. According to [ 31 ], MLI estimates the emission parameters (and possibly π when P is unknown and not of interest) o f general (erg odic) HMMs pretending that Y 1 , Y 2 , . . . , ar e independent, that is , the entire HMM follo ws a mixture mo del. This is app ealing since 190 J. L emb er and A. Koloydenko the marg inal distribution o f the emissio ns of a n y HMM (with a stationar y regime) is in- deed the mixture with density P k π k f k ( · ; θ k ). Thus, MLI is an instance of the maximu m pseudo-likeli ho o d (MPL) based on the ab ov e mixture appr o x imation. The MLI– MPL es - timators for the emission parameters are (lo cally) consistent [ 31 , 42 ] and c a n also be delivered by EM (for mixtures ). Similarly to the genera l ca se, when computational re- sources do matter, VT (for mixtures) can also be used instead o f EM in this ca se. As in the general cas e, Baum–W elc h and VT scale identically , but their co mmon computational complexity is now K n , as oppo sed to K 2 n . The compar ativ e computational p erformances of Ba um– W elch and VT for mixtures and in the general ca se are also similar (the Baum algorithm involv es more in tensive o perations). A t the sa me time, as Example 1 in Sec- tion 2.2 ab o ve shows, the VT estimators are still not consistent and, in particular, the correction ∆ l = θ l − µ l ( ψ ), with µ l ( ψ ) as in ( 2.13 ), ca n b e significant. Let us ma k e ano ther p oint. L e t θ be fixed and let ∆ l and ∆ ∗ l be the co rrections obtained with and without the independence a ssumption ( p ij = π j , i, j ∈ S ), resp e c tively . The following intuitiv e fact has b een shown in [ 24 ] by sim ulation: ∆ ∗ l ≤ ∆ l and the difference ∆ l − ∆ ∗ l widens as the dep endence in P beco mes stronger. This suggests that there is more to gain b y adjusting VT for mixtures tow ar d MPL-MLI than b y adjusting VT fo r the actual HMM tow ar d the true MLE. Th us, if one is in teres ted in a co mputationally efficient approximation to (the Ba um implementation o f ) MPL–MLI, the adjusted Viterbi training for mixtures is a sensible alternative to the baseline Viterbi training for mixtures. Also, note that V A for mixture models was studied in [ 27 ], where, in addition to the theoretical demonstration of the VT bias, it was also shown by simulations that this bias could be signific antly reduced b y V A. Impo rtan tly , in the mixture case, the V A corr ections are often g iv en explicitly , which s implifies the implementation o f the algor ithm. The independent training a pproach is a lso a natural choice when the underlying regime is a gener al ergo dic pro cess (not necessar ily Marko v) with an (unknown) stationary distribution π . Even when not of direct in ter e st, π can a nd needs to b e es timated. Again, if computational efficiency is an issue, V A for mixtures with unknown weigh ts is an alternative to the Baum algorithm (for mixtures with unkno wn w eights). Note that in this case, the co r rections R l = π l − q l ( ψ ), with q l ( ψ ) as in ( 2.14 ), should be used in addition to the ∆ l corrections. Simu lations in [ 27 ] sho wed a clear adv a n tag e of using bo th adjustments R l and ∆ l for mixture models with unknown π . In particular, V A was, as usual, both supe r ior to VT and only slightl y inferior to E M, in precision. Remark ably , taking few steps to sta bilize, V A also o utperformed VT in total run time. 2.4. Implemen tation T o implemen t V A in pr a ctice, explicit expres sions for Q l ( ψ ) (or µ l ( ψ )) a nd q ij ( ψ ) are desirable. In general, ho wev er, these functions ca n b e v ery difficult to compute with high precision. A t the same time, as w a s just p oin ted out in Section 2.3 ab o ve, the co rrections ∆ l and R l are easy to obtain for a broad class of mixture models including the mo st commonly used mixtures of Gaussians with equal and known cov ariances. Other deta ils of V A implementation ha ve been addres sed in [ 27 ] and [ 24 ] for mixture and mor e genera l The adjuste d Viterbi tr aining for hid den Marko v mo dels 191 mo dels, respectively . F o r one example, [ 24 ] discusses the sto chastic al ly adj uste d Viterbi tr aining , an efficien t implementation of V A for general HMMs when the co rrections can- not b e obtained analytically . Although sim ulatio ns do require extra computations, the ov era ll complexity of the sto c hastically adjusted VT can still b e considera bly lower than that of Baum–W elch. Certainly , this requires further in vestigation. Other pr actical issues are also a sub ject of con tin uing in vestigation. 3. Infinite Viterbi alignmen t The idea of the adjusted Viterbi training is based o n, firstly , the o bserv ation that the maximum likelihoo d path (the Viterbi alig nmen t) differs substantially from the underly- ing Mar k ov chain and, secondly , that these differences need to b e acco un ted for in o rder for the ov er all HMM-based inference to be accurate. Our adjusted Viterbi training need not b e the only metho d to co r rect the training pro cess fo r these differences. How ever, any such metho d must inevitably apprecia te the asymptotic proper ties o f both th e Viterbi alignment and the subsamples of the emissions as classified by the alignment. After all, it is these features that determine the pr operties of the VT estimators in genera l and the asymptotic bias of VT in particular. Even disreg arding the non-uniqueness o f the Viterbi a lignmen t v ( x 1: n ) (dependence on ψ is temp orarily s uppressed), the asymptotic b ehavior of v ( X 1: n ) is no t trivial since the ( n + 1 )th o bserv ation can in principle ch ange the entire alignment bas e d o n x 1: n . Namely , let v ( x 1: n ) and v ( x 1: n +1 ) be the alignments based on x 1: n and x 1: n +1 , respec tiv ely . It might happen with p ositiv e probability that v ( x 1: n ) i 6 = v ( x 1: n +1 ) i for every i = 1 , . . . , n . A t the same time, the fact that the alignment ch anges infinitely often makes it difficult to define a meaningful infinite alignmen t pr ocess . F or most HMM s, howev er, there is a po sitiv e proba bility of observing x 1: n such that, regardless of the v alue of the ( n + 1)th o bs e r v ation (provided n is sufficiently lar ge), the alignments v ( x 1: n ) and v ( x 1: n +1 ) agree fo r a sufficien tly long time u ≤ n . Consequently , reg a rdless of wha t happens in the future, the first u elemen ts of the alignment remain constant. Pr o vided that there is an increasing unbounded sequence u i ( u < u 1 < u 2 < · · · ) such that the alignment up to u i remains constant , infinite alignments can then b e defined. The observ ation that for most commonly used HMMs, a t ypica l realizatio n x 1: ∞ has infinitely many u i is the basis of our further analysis. Consider the follo wing simple mo del that g ua ran tees almo st every x 1: ∞ to ha ve in- finitely ma n y u i ’s and provides an insight into a significant ly mor e general scenario. Let state 1 ∈ S and ev ent A ∈ B be suc h that P 1 ( A ) > 0, while P l ( A ) = 0 for l = 2 , . . . , K . Thu s, any obs erv ation x u ∈ A is almost surely g e ner ated under Y u = 1 and we say that x u indic ates its state . Consider n to b e the ter minal time and note tha t any p ositive like- liho od pa th, including v ( x 1: n ), the maxim um likelihoo d one, must go through the state 1 at time u . This allows us to split the Viterbi alignmen t into v 1 and v 2 , an alignment from time 1 thro ugh time u a nd an alignmen t from time u throug h time n , r e s pectively . Namely , v 1 and v 2 maximize Λ( y 1: u ; x 1: u ) and Λ( y u : n ; x u : n ), the respective lik eliho o ds. By concatenating v 1 with v 2 2: n − u +1 (removing the ov erlapping v 2 1 = 1 ), we obtain v ( x 1: n ) 192 J. L emb er and A. Koloydenko that maximizes Λ( y 1: n ; x 1: n ). Clearly , a n y additional observ ations x n +1: m do not change the fact th at x u indicates its state. Hence, for any extension o f x 1: n , the first pa rt of the alig nmen t is alwa y s v 1 . Thus, any obser v a tion that indicates its state also fixes the beg inning of the a lignmen t. Since o ur HMM is a stationar y pro cess that has a p osi- tiv e pro babilit y o f generating state-indicating observ ations, there will be infinitely many such observ a tio ns almost surely. (The ov erla p v 2 1 = 1 is sur ely a nuisance since v 2 2: n − u +1 maximizes Λ( y u +1: n ; x u +1: n ) with the initial distribution π r eplaced by ( p 1 j ) j ∈ S .) 3.1. No des The ab o ve example is rather exceptional and w e next define nodes to generalize the idea of state-indicating observ ations. First, consider the sc or es δ u ( l ) def = max y 1: u − 1 ∈ S u − 1 Λ(( y 1: u − 1 , l ); x 1: u ) , (3.1) defined for all u ≥ 1, x 1: u ∈ X u and states l in S . Th us, δ u ( l ) is the maximum of the lik e- liho od of the paths terminating at u in s ta te l . Note that δ 1 ( l ) = π l f l ( x 1 ). The recursion δ u +1 ( j ) = max l ∈ S ( δ u ( l ) p lj ) f j ( x u +1 ) for all u ≥ 1 and j ∈ S (3.2 ) helps to verify that V ( x 1: n ), the set of all the Viterbi alignmen ts, can be written as follows: V ( x 1: n ) = { v ∈ S n : ∀ i ∈ S, δ n ( v n ) ≥ δ n ( i ) and ∀ u : 1 ≤ u < n, v u ∈ t ( u, v u +1 ) } , (3.3) where t ( u, j ) def = { l ∈ S : ∀ i ∈ S δ u ( l ) p lj ≥ δ u ( i ) p ij } for ev er y u = 1 , . . . , n. Thu s, using ( 3.2 ), the Viterbi algorithm in its forward pass calculates δ u ( i ), i = 1 , . . . , K , u = 1 , . . . , n , and stores maximizers l ∈ t ( u, j ) (with some tie- br eaking rule) to yield δ u +1 ( j ) = δ u ( l ) p lj f j ( x u +1 ). The final alignment can then b e found by backtrac king as follows: v n ∈ arg ma x i ∈ S δ n ( i ), v u ∈ t ( u, v u +1 ), u = n − 1 , . . . , 1. Definition 3.1. Given x 1: u , the fi rst u ob servations, the observa tion x u is said t o b e an l -no de (of or der 0) if δ u ( l ) p lj ≥ δ u ( i ) p ij for al l i, j ∈ S. (3.4) We also say that x u is a n o de (of or der 0) if it is an l -no de for some l ∈ S . We say t hat x u is a str ong no de if the ine qualities in ( 3.4 ) ar e strict for every i, j ∈ S , i 6 = l . Definition 3.2 b elow gener alizes this one by including no des of p ositive or ders. Clearly , if x u is an l -no de, then l ∈ t ( u, j ) for all j ∈ S (see Figure 1 ). Consequently , if x 1: u is such that x u is an l -no de, then there ex ists v ( x 1: n ) ∈ V ( x 1: n ) with v ( x 1: n ) u = l , The adjuste d Viterbi tr aining for hid den Marko v mo dels 193 Figure 1. An example of th e Viterbi algorithm in action. The so lid line co rrespond s to the final alignmen t v ( x 1: n ). The dashed li nks are of the form ( k , l ) − ( k + 1 , j ) with l ∈ t ( k , j ) and are not part of the fin al alignmen t. F or example, (1 , 3)–(2 , 2) is because 3 ∈ t (1 , 2), 2 ∈ t (2 , 3). The observ ation x u is a 2 -node since we ha ve 2 ∈ t ( u, j ) for every j ∈ S . Also, note th at v ( x 1: u ) is fixe d , that is, v ( x 1: u ) = v ( x 1: n ) 1: u . which guarantees (the existence of ) a fixed alignmen t up un til u . If the node is strong, then a ll the Viterbi alignmen ts must coale s ce at u . Thus, the c o ncept of strong no des circumv ents the incon veniences caused b y the non-uniqueness. Namely , re g ardless of how the ties ar e bro k en, every alignment is fo rced in to l at u and any tie-br eaking rule would suffice for the pur pose of o btaining the fixed alig nmen ts. How ever tempting, strong nodes , unlik e the genera l o nes, are quite restrictiv e. Indeed, suppose our model allo w s for A with P 1 ( A ) > 0 and P l ( A ) = 0, for l = 2 , . . . , K . Hence, for almost every x u ∈ A , we hav e δ u (1) > 0 and δ u ( i ) = 0 for every i ∈ S , i 6 = 1 . Thus, ( 3.4 ) ho lds and x u is a 1-no de. If, in addition, p 1 j > 0 for ev e ry j ∈ S , then for every i, j ∈ S , i 6 = 1 , the left-hand side of ( 3.4 ) is p ositiv e, wherea s the right-hand s ide is 0, ma king x u a strong node. If, how ever, there is a j suc h that p 1 j = 0 , whic h can ea sily ha ppen if K > 2, then for this j , b oth sides are 0 and x u is no longer strong. The concept of no des (including higher o rder no des to be defined b elow) is ess e n tially the same as ‘crossing Viterbi paths’ of [ 7 ] or ‘meeting times/states’ [ 5 ], where the existence of s trong nodes is pro ved implicitly . The ab ove w or ks assume that the entries of P , the transition matrix, ar e p ositiv e, w hich excludes our previous example of x u being a no de and not a strong no de. Using the concept o f no des, let us briefly analyze the r esults of these works. In [ 7 ], there are tw o main theorems. In terms of nodes, Theorem 1 of [ 7 ] sta tes the follo wing. L et j 0 ∈ S b e a r e cu rre nt state. L et i 0 ∈ S b e such that for al l i, j, k ∈ S , i 6 = i 0 , P j 0 ( { x ∈ X : p j i 0 f i 0 ( x ) p i 0 k > p j i f i ( x ) p ik } ) > 0 . (3.5) Then, almost every r e alizatio n of HMM has infinitely many n o des. Up to notation, the condition ( 3.5 ) ab ov e is stated as it app ears in [ 7 ]. How ever, this theor em is pr o ved in [ 7 ] under the following str o nger co ndition ( 3.6 ) (in [ 6 ], the a uthors of [ 7 ] have re c e ntly confirmed this to b e a misprin t): P j 0 ( { x ∈ X : p j i 0 f i 0 ( x ) p i 0 k > p j i f i ( x ) p ik ∀ i, j, k ∈ S, i 6 = i 0 } ) > 0 . (3.6) 194 J. L emb er and A. Koloydenko T o see how significant ly this alteration w ea k ens the theorem, let A ⊂ X b e the set as in ( 3.6 ) and let us first sho w that an y x u ∈ A is a strong i 0 -no de. Indeed, fix i ∈ S, i 6 = i 0 . There then exists j (depending on i ) suc h tha t δ u ( i ) = δ u − 1 ( j ) p j i f i ( x u ) . Next, for every k , δ u ( i ) p ik = δ u − 1 ( j ) p j i f i ( x u ) p ik and th us δ u ( i ) p ik < δ u − 1 ( j ) p j i 0 f i 0 ( x u ) p i o k ≤ max j δ u − 1 ( j ) p j i 0 f i o ( x u ) p i 0 k = δ u ( i 0 ) p i 0 k . Thu s, ( 3.6 ) implies that ev ery obser v ation from A is a stro ng no de. Since j 0 is re c ur ren t and A has a p ositive P j 0 -probability , clearly there are almost surely infinitely man y such no des. The existence of A satisfying ( 3.6 ), how ever, a ppears to be more o f an exception than a rule. Note that ( 3.6 ) do es not hold if P contains a 0 in e very row or in every column. Another impo rtan t exa mple o f HMMs for which A satisfying ( 3.6 ) need not exist is the HMM with additiv e white Gaussian noise (Exa mple 1 of [ 5 , 7 ]). In f act, it is stated in [ 7 ] that the assumption of their Theorem 1 is sa tisfied for this mo del independently of the tr ansition matrix. In [ 6 ], the authors of [ 5 , 7 ] ha ve recently confirmed accidental omissions of the in tended positivity condition, which, from the example below, can b e seen to b e crucial for Theo rem 1 of [ 7 ], as well as Theorems 3 and 6 o f [ 5 ]. Also, note that the follo wing example do es not r equire that P contain z e r os in every row or column and is hence substan tially different from the exa mple giv en above. Thus, let K = 3 and let p 13 = 0 b e the only zero entry of P . This already rules out ( 3.6 ) for i 0 = 1 and i 0 = 3 . F ollowing [ 7 ], in the additiv e white Gaussian noise mo del, the emission density f i is univ ariate normal with mean i = 1 , 2 , 3 and v ariance 1. Let x be such that p j 2 f 2 ( x ) p 2 k > p j i f i ( x ) p ik ∀ i, j, k ∈ S, i 6 = 2 . In particular, with j = 2, p 22 f 2 ( x ) p 23 > p 23 f 3 ( x ) p 33 and p 22 f 2 ( x ) p 21 > p 21 f 1 ( x ) p 11 . Hence, f 2 ( x ) f 3 ( x ) > p 33 p 22 , f 2 ( x ) f 1 ( x ) > p 11 p 22 . (3.7) Since p 11 and p 33 are both p ositiv e, one can easily find p 22 > 0 sufficiently sma ll for ( 3.7 ) to fail, implying that i 0 6 = 2 . Ther e fore, ( 3.6 ) , the (cor r ected) hypothesis of Theo r em 1 of [ 7 ], which is also the hypo thesis of Theorem 3 of [ 5 ], need not hold for the HMM with the additiv e Gaussian noise a nd P ge ner al. W e next extend the notion of no des (Definition 3.1 ) to acc o un t for the fact that a general ergo dic P can hav e a zero in every row, in which case no des of o rder 0 need not exist. Indeed, supp ose that x 1: u is suc h that δ u ( i ) > 0 for every i ∈ S . In this case, ( 3.4 ) implies that p lj > 0 for ev e ry j ∈ S (the l th row of P must b e positive) and ( 3.4 ) is equiv alent to δ u ( l ) ≥ max i (max k ( p ik p lk ) δ u ( i )) . First, w e intro duce p ( r ) ij ( u ), the maxim um likelihoo d of the paths connecting states i and j at times u a nd u + r , respectively . Th us, for each u ≥ 1 and r ≥ 1 , let p ( r ) ij ( u ) def = max q 1: r ∈ S r p iq 1 f q 1 ( x u +1 ) p q 1 q 2 f q 2 ( x u +2 ) p q 2 q 3 · · · p q r − 1 q r f q r ( x u + r ) p q r j . The adjuste d Viterbi tr aining for hid den Marko v mo dels 195 Figure 2. x u is a 2nd order 2-no de, x u − 1 is a 3rd-order 3-no de. Any alignmen t v ( x 1: n ) has v ( x 1: n ) u = 2. Also, note that p ( r ) ij ( u ) = max q ∈ S p ( r − 1) iq ( u ) f q ( x u + r ) p qj , where p (0) ij ( u ) def = p ij , u ≥ 1. Re- cursion ( 3.2 ) then generalizes as follo ws: for all r > u ≥ 1, for eac h j ∈ S , δ u +1 ( j ) = max i ∈ S ( δ u − r ( i ) p ( r ) ij ( u − r )) f j ( x u +1 ) . Definition 3.2. L et 1 ≤ r < n , 1 ≤ u ≤ n − r and let l ∈ S . Given x 1: u + r , the first u + r observations, x u is said to b e an l - no de o f o rder r if δ u ( l ) p ( r ) lj ( u ) ≥ δ u ( i ) p ( r ) ij ( u ) for al l i, j ∈ S . (3.8) x u is said to b e an r th- order no de if it is an r th-or der l -no de for some l ∈ S . x u is said to b e a strong no de of order r if the ine qualities in ( 3.8 ) ar e strict for every i, j ∈ S , i 6 = l . Note that any r th-order no de is also a no de of order r ′ for a n y in teg e r r ≤ r ′ < n and thus, by the o rder of a node, w e will mean the minimal such r . Also, note that for K = 2, a node o f an y order is a no de of order 0. Hence, positive order no des only emerge for K ≥ 3 . If x u is an l -node o f or der r , then r egardless of wha t the obser v ations after x u + r are, x u remains an l -node of order r . Mor eo ver, it follows from a decompo sition of V ( x 1: n ) similar to that o f ( 3.3 ) that there exists v ( x 1: n ) ∈ V ( x 1: n ) such that v ( x 1: n ) u = l . The difference b et ween no des (of order 0 ) and no des of po sitiv e o rder r is that for v ( x 1: n ) u = l to hold, u needs to be at lea st r steps before n ( n > u + r ). Otherwise, for m such that u < m ≤ u + r , it migh t happ en that no a lignmen t v ( x 1: m ) ∈ V ( x 1: m ) satisfies v ( x 1: m ) u = l . The role of higher or der no des is similar to that of nodes. Namely , provided a prop er tie-breaking rule is given the existence of a higher order no de x u ensures the existence of a fixed alignmen t up to u . At the sa me time, allo wing no des of higher orders remov es the p ositivity restriction on rows o f P . Although implicit (and defined relative to a fixed and global t ie-breaking rule), nodes of orders p ossibly higher than 0 are also a main to ol in [ 5 , 7 ]. Sp ecifically , statemen ts K ′ and K ′′ , underpinning the main results of [ 7 ], ar e interpreted in terms o f no des as follows. K ′ : almost every r e alization of an HMM has infin itely many (variable or der) no des. (The no de orders r 1 , r 2 , . . . in K ′ can dep e nd on the realization x 1: ∞ and hence need not b e 196 J. L emb er and A. Koloydenko almost s urely b ounded.) K ′′ : a lmost every r e alizatio n of an HMM ha s infinitely many no des of or der 0. (Thus, K ′ implies K ′′ and for K = 2, K ′ is equiv alent to K ′′ .) Lemmas 3.1 and 3.2 b elo w give significantly stro nger results, whic h a ls o allow for an algorithmic construction of infinit e piecewise alignments. 3.2. Piecewise a lignmen t Let x 1: n be suc h that x u i is an l i -no de of order r , 1 ≤ i ≤ k , for some k < n and as- sume that u k + r < n and u i +1 > u i + r for all i = 1 , 2 , . . . , k − 1. Suc h no des are said to be sep ar ate d . It follo ws fr o m the definition of no des that there exists a Viterbi align- men t v 1: n ∈ V ( x 1: n ) such that v u i = l i for ev er y i = 1 ≤ k . Indeed, Definition 3.2 imme- diately implies the existence of a Viterbi alignmen t v ′ 1: n ∈ V ( x 1: n ) with v ′ u k = l k . The same definition and optimalit y of backtracking b y the Viterbi alg orithm imply that ( w 1: u k − 1 + r , v ′ u k − 1 + r +1: n ) ∈ V ( x 1: n ) for some prefix w 1: u k − 1 + r with w u k − 1 = l k − 1 . Con- tin uing in this manner down to no de x u 1 , w e exhibit v 1: n with v u i = l i , i = 1 , 2 , . . . , k . Let us discuss the assumption u i +1 > u i + r , i = 1 , 2 , . . . , k − 1. The fact that x u i is an r th-order l i -no de guara n tees that when backtracking from u i + r down to u i , ties ca n be broken in such a w ay that, regardless of the v alues of x u + r +1: n and how ties a r e bro k en in be tw een n and u i + r , the alignment go es through l i at u i . At the same time, segment u i , . . . , u i + r is ‘delicate’, that is, unless x u i is a strong node, breaking ties arbitrar ily on u i , . . . , u i + r can result in v ( x 1: n ) u i 6 = l i . Hence, when neither x u i nor x u i +1 is strong and u i +1 ≤ u i + r , breaking ties in fav or of x u i can r esult in v u i +1 6 = l i +1 . Note that such a pathological situation is imp ossible if r = 0 and might be rare in practice for r > 0 . Finally , note that this assumption is not restrictive s ince it is alwa ys p ossible to choose from an y sequence o f no des a subsequence o f no des that are s eparated. T o formalize the piecewise construction in tro duced above, let W l ( x 1: n ) = { v ∈ S n : v n = l , Λ( v ; x 1: n ) ≥ Λ( w ; x 1: n ) ∀ w ∈ S n : w n = l } , V l ( x 1: n ) = { v ∈ V ( x 1: n ) : v n = l } , for all n ≥ 1 , l ∈ S and x 1: n ∈ X n , be the sets of maximizers of the co ns tr ained lik eliho o d and the subset of maximizers of the (unconstrained) likelihoo d, re s pectively , all elements of whic h go through l at u . Note that, unlik e W l ( x 1: n ), V l ( x 1: n ) mig h t be empt y . It can be shown that V l ( x 1: n ) 6 = ∅ implies that V l ( x 1: n ) = W l ( x 1: n ). Also , let the subscript ( l ) stand for using ( p li ) i ∈ S as the initial distribution in place of π . Thus, the sets V ( l ) ( x 1: n ) and W m ( l ) ( x 1: n ), m ∈ S , will also be used. The piecewise construction can be formulated as follows. Suppos e th at there exist l 1 , . . . , l k ∈ S and u 1 , . . . , u k ≥ 1 , r 1 , . . . , r k ≥ 0 with u 1 + r 1 < u 2 + r 2 < · · · < u k + r k < n such that x u i is an l i -no de of order r i for every i ≤ k . There then exists an alignment v ( x 1: n ) = ( v 1 , . . . , v k +1 ) ∈ V ( x 1: n ), where v 1 ∈ W l 1 ( x 1: u 1 ), v i ∈ W l i ( l i − 1 ) ( x u i − 1 +1: u i ) , 2 ≤ i ≤ k , and v k +1 ∈ V ( l k ) ( x u k +1: n ) . (3.9) The adjuste d Viterbi tr aining for hid den Marko v mo dels 197 Moreov er, for every i = 1 , 2 , . . . , k , w ( i ) def = ( v 1 , . . . , v i ) ∈ V l i ( x 1: u i ). Thus, when a node is observed at time u k , the a lignmen t up to u k beco mes fixed, yielding natur a l extensio ns of finite alignmen ts for n → ∞ . Besides providing the to ol for the asymptotic analysis, the piecewise constr uction is als o of co mputational significance. Indeed, note that once x u 1 has b een recognized to b e a no de and w (1) has been constructed, the memory allo cated for storing x 1: u 1 and t ( u, j ) (see ( 3.3 )) for u ≤ u 1 and j ∈ S is no longer needed a nd can be free d. Thu s, if x 1: ∞ has infinitely man y no des { x u k } k ≥ 1 that are separated, then v ( x 1: ∞ ), an infinite pie c ewise alignment b ase d on the no de times { u k ( x 1: ∞ ) } k ≥ 1 can b e defined as fol- lows. If the sets W l i ( l i − 1 ) ( x u i − 1 +1: u i ), i ≥ 2 , as w ell as W l 1 ( x 1: u 1 ) are sing letons, then ( 3.9 ) immediately defines a unique infinit e alignment v ( x 1: ∞ ) = ( v 1 ( x 1: u 1 ) , v 2 ( x u 1 +1: u 2 ) , . . . ). Otherwise, ties m ust b e broken. In or der for our infinite alignmen t process to b e re- generative, a natural consistency condition must be imposed on r ules to select uni que v ( x 1: n ) fr o m W l 1 ( x 1: u 1 ) × W l 2 ( l 1 ) ( x u 1 +1: u 2 ) × · · · × W l k ( l k − 1 ) ( x u k − 1 +1: u k ) × V ( l k ) ( x u k +1: n ). Resulting infinit e alignments, as well a s deco ding v : X ∞ → S ∞ based on such align- men ts, will be called pr op er . This co ndition is, per haps, best understo o d b y the fol- lowing example. Suppo se, for some x 1:5 ∈ X 5 , that W 1 (1) ( x 1:5 ) = { 12211 , 11 211 } and suppo se that the tie is broken in fav o r o f 11211 . Now, whenever W 1 ( l ) ( x ′ 1:4 ) contains { 1221 , 1121 } , we naturally require that 1221 no t be selected. In particular, we break the tie in W 1 (1) ( x 1:4 ) = { 1221 , 11 21 } by selecting 112 1. Subsequently , 112 is selected from W 2 (1) ( x 1:3 ) = { 122 , 112 } , and so on. It can be shown that a decoding by piecewise align- men t ( 3.9 ) with ties broken in fa vor of min (or max) under the reverse lexicographic ordering of S n , n ∈ N , is a proper deco ding. Example 2 (Mixtur es r evisite d). Consider the mixture mo del a s in Example 1 . In this case, an observ ation x u is an l -node if and only if δ u ( l ) ≥ δ u ( i ) for every i ∈ S . In particular, this impl ies that every observ a tion is an l -no de (of order 0) for some l ∈ S . Recursion ( 3.2 ) can then be written for any u ≥ 2 and i ∈ S as δ u ( i ) = max j ∈ S δ u − 1 ( j ) π i f i ( x u ) = cπ i f i ( x u ), where c do es not depend on i . Hence, x u is an l - no de if and o nly if π l f l ( x u ) ≥ π i f i ( x u ) fo r all i ∈ S . Therefore, the alignmen t c a n be obtained component-wise: v ( x 1: n ) = ( v ( x 1 ) , . . . , v ( x n )) , where v ( x ) = arg max i ∈ S π i f i ( x ) . (3.10) Clearly , the alignment is prop er if the ties in ( 3.10 ) ar e broken c o nsisten tly , that is, if v ( x ) is indeed a well-defined function of x . Example 2 helps to understand the necessit y of breaking ties consistently . If our s o le goal were to c o nstruct infinite a lignmen ts, then any piecewise (not nec e s sarily prope r) alignment would suffice. How ever, the existence of Q l ( ψ ), l ∈ S , requires more. Indeed, suppo se that the right-hand side of ( 3.10 ) is not unique for so me x , an a tom of, say ˆ P n 1 , as defined in ( 2.3 ). If the selection in ( 3.10 ) is consistent, say , v ( x ) = 1 , then, in the limit, 198 J. L emb er and A. Koloydenko x will also be an atom of Q 1 ( ψ ). Otherwise, if ties in ( 3.10 ) are broken ar bitra rily , then the limiting measures might not exis t a t all. Also, note that w e break ties lo cally , that is, within individual interv als u i − 1 + 1 , . . . , u i , i ≥ 2 , enclosed b y the adjacent no des. This is in cont rast to globa l order ing of V ( x 1: ∞ ), such as the one in [ 5 , 7 ], whic h igno r es decomp osition ( 3.9 ). A g lobal r ule c a n f ail to pro duce an infinite alignment going through infinitely many nodes unless the nodes are strong (as a ssumed in [ 5 , 7 ]). 3.3. Barriers T o test whether x u is a no de o f order r requires the ent ire realization x 1: u + r (Definition 3.2 ). In par ticular, for an a rbitrary prefix x ′ 1: w ∈ X w and m < u , the ( w + m + 1 )th element of ( x ′ 1: w , x u − m : u + r ) need not be a no de r elativ e to ( x ′ 1 ...w , x u − m : u + r ), ev e n when x u is a node of order r relative to x 1: u + r . W e show below that typically , a block x b 1: k ∈ X k ( k ≥ r ) can b e found suc h that for any w ≥ 1 and a n y x ′ 1: w ∈ X w , the ( w + k − r ) th element of ( x ′ 1: w , x b 1: k ) is a no de of or der r (relativ e to ( x ′ 1: w , x b 1: k )). Sequences x b 1: k that ensure the existence o f such persistent no des will be called b arriers . Definition 3.3. Given l ∈ S , x b 1: k ∈ X k is c al le d a (str ong) l -b arrier of or der r ≥ 0 and length k ≥ 1 if, for any w ≥ 1 a nd every x ′ 1: w ∈ X w , ( x ′ 1: w , x b 1: k ) is such that ( x ′ 1: w , x b 1: k ) w + k − r is a (str ong) l -no de of or der r . Note that any observ a tion from the set A consider ed in ( 3.6 ) is a barrier o f length 1. In particular, an y obser v ation that indicates a s tate is a barrier of length 1 . Next, we state and discuss Lemmas 3.1 and 3.2 , the first of the tw o main results of this pap er. First, let G l = T G - closed ,P l ( G ; θ l )=1 G denote the suppor t o f the family P l ( θ l ), θ l ∈ Θ l , for all l ∈ S . Definition 3.4. We c al l a subset C ⊂ S a cluster, if the fol lowi ng c onditions ar e satis- fie d: min j ∈ C P j \ i ∈ C ( G i ∩ { x ∈ X : f i ( x ) > 0 } ) ! > 0 and P j \ i ∈ C G i ! = 0 ∀ j / ∈ C. Hence, a cluster is a maximal subset o f states such that G C = T i ∈ C G i is ‘detectable’. Distinct clus ter s need not be disjoint and a cluster can consist of a single state. In this latter ca se, suc h a state is not hidden since it is indicated b y an y observ ation which it emits. When K = 2 , S is the o nly cluster possible since o therwise, all observ ations would reveal their states and the under lying Mar k ov chain would cease to b e hidden. In practice, man y other HMMs have the en tir ity of S as their (necessarily unique) cluster. The pro of of the followin g lemma is rather technical and can be found in [ 26 ], Ap- pendix 5 .1 , pag e s 26–3 9 . The adjuste d Viterbi tr aining for hid den Marko v mo dels 199 Lemma 3.1. Assume t ha t for e ach state l ∈ S , P l x ∈ X : f l ( x ) max j ∈ S ( p j l ) > max i ∈ S,i 6 = l f i ( x ) max j ∈ S ( p j i ) > 0 . (3.11) Mor e over, assume that ther e exists a clus t er C ⊂ S and an inte ger m < ∞ such that the m th p ower of the su bsto chastic matrix Q = ( p ij ) i,j ∈ C is strictly p ositive. Then, fo r some inte gers M and r , M > r ≥ 0 , ther e exist B = B 1 × · · · × B M ⊂ X M , q 1: M ∈ S M and l ∈ S such that every x b 1: M ∈ B is an l -b arrier of or der r (and length M ), q M − r = l , P ( X 1: M ∈ B | Y 1: M = q 1: M ) > 0 and P ( Y 1: M = q 1: M ) > 0 . Lemma 3.1 implies that P ( X 1: M ∈ B ) > 0. Also, since every elemen t of B is a barrier of o rder r , the ergo dicit y of X therefore guara n tees that almost every realiza tion of X 1: ∞ contains infinitely many l -barr iers of or der r . Hence, almost ev er y realization of X 1: ∞ also has infinitely many l -no des of order r . Let us briefly analyze ( 3.11 ) and the existence of a cluster C assumed in Lemma ( 3.1 ). First, consider the case when S itself is a cluster. This o ccurs, for example, if the suppo rts of all the emission distributions coincide. Then, the substo chastic matrix ( p ij ) i,j ∈ C = P and ap erio dicit y of P implies that P m is s trictly pos itiv e for some p o w er m . Hence, the cluster assumption is satisfied in this case. Our cluster as sumption essentially genera lizes assumption A1 of [ 5 , 7 ], whic h r e q uires P , the transition ma trix, to be strictly p ositiv e a nd the supp orts G i to b e a ll equal. As alr eady po in ted out, the assumption of strict po sitivit y of P b ecomes ra ther r estrictiv e when K > 2. Moreover, [ 26 ], Exa mple 3.1 1, s ho ws that the cluster a ssumption is not only s ufficien t but also ne c essary f or no des (and barriers) to exist. W e also p oin t out that the pro of of the existence of nodes in [ 5 ] (Theorem 2) heavily relies on the supp orts being equal, whic h is also crucial for as s umption A2 [ 5 , 7 ] and whic h is not assumed in Lemma 3.1 . Note that ( 3.11 ) basic a lly says that for every state l ∈ S , there is a set where the mea- sure P l ( θ l ) ‘dominates’, that is, { x ∈ X : f l ( x ) max j ∈ S p j l > max i ∈ S,i 6 = l ( f i ( x ) max j ∈ S p j i ) } is of po sitiv e λ -measur e. W e are not aw are of any HMMs used in pra ctice for whi ch this assumption does not hold. Moreov er, for many mo dels (see Example 3 b elow), it is actua lly sufficien t for proving the existence of barr iers that ( 3.11 ) holds for at least one sta te l , whic h, provided that the emission distributions P l ( θ l ), l ∈ S , are all dis- tinct, is always the case . Also, note that for the mixture mo del, ( 3.11 ) simplifies to P l ( { x : f l ( x ) π l > f i ( x ) π i , ∀ i 6 = l } ) > 0 and that assumption ( 3.11 ) is weaker than ( 3 .6 ) since the latter implies that P i 0 x ∈ X : f i 0 ( x ) max j ∈ S p j i 0 > ma x i ∈ S,i 6 = i 0 f i ( x ) max j ∈ S p j i > 0 . Example 3 ( K = 2 ). S = { 1 , 2 } is the only cluster. Assume P to be strictly p ositiv e. Thu s, the cluster as sumption of Lemma 3.1 is fulfilled . Assume P 1 ( θ 1 ) and P 2 ( θ 2 ) to be distinct. F ollowing [ 5 ], consider the following three cas e s . Cas e 1: p 11 > p 21 (equiv alent ly , p 22 > p 12 ); ca se 2 : p 11 < p 21 (equiv alent ly , p 22 < p 12 ); case 3: p 11 = p 21 (equiv alent ly , p 22 = p 12 ). Note that since λ ( { x ∈ X : f 1 ( x ) 6 = f 2 ( x ) } ) > 0 (the tw o emission distributions 200 J. L emb er and A. Koloydenko differ), the sets X 1 def = { x ∈ X : f 1 ( x ) p 11 > f 2 ( x ) p 22 } , X 2 def = { x ∈ X : f 1 ( x ) p 11 < f 2 ( x ) p 22 } satisfy λ ( X 1 ) > 0 or λ ( X 2 ) > 0 . (3.12) Without loss of gener alit y , assume p 11 ≥ p 22 , hence λ ( X 1 ) > 0. It is then not hard to exhibit strong 1-barrier s in case 1. Indeed, in this case, a Viterbi path v ( x 1: n ) can switch states only at no des, that is, v ( x 1: n ) u : u +1 = ( l , j ) , l 6 = j , implies that x u is a strong l - no de. An in teger k can then b e chosen sufficiently large for any sequence z 1: k ∈ X k 1 to b e a stro ng 1-barrier. Suppose that this w ere no t the case and hence that no z i , 1 ≤ i ≤ k , would b e a 1- node. It could then be s ho wn that no z i could b e a 2-no de either, hence corresp onding k - s egmen ts of Viterbi paths v ( x 1: n ), n > k , w ould ha ve to be cons tan t, namely all 1 ’s or all 2’s. Ho wev er, k is so large that seg men t 211 . . . 12 is more optimal than 22 . . . 2, implying the presence of a strong 1-no de. Thu s, in cas e 1, the o ccurrence o f infinitely man y bar r iers (or nodes) does not require any additional assumptions. In particular, assumptions A1 (the suppor ts b eing equal) and A2 (log-ratio of the densities being squa r e-in teg rable) of [ 5 , 7 ] are unnecessary for proving the results of T heo rems 7, 8 and 9 of [ 5 ]. F urthermore, ass umption ( 3.1 1 ) of Lemma 3.1 is, in this ca se, equiv alent to th e conjunction o f λ ( X 1 ) > 0 and λ ( X 2 ) > 0. Thu s, Lemma 3.1 can b e further strengthened in this case to gua ran tee that almost every rea lization o f the HMM has infinitely ma ny bo th 1- a nd 2-ba r riers. Alternatively , assumption ( 3.11 ) can be relaxed to ( 3.12 ) in this case, as well as in many other practical situations, for Lemma 3.1 to still g uarant ee a t lea st one type of barrier. Next, consider ca se 2 . Lemma 3.1 says that when bo th sets X 1 def = { x ∈ X : f 1 ( x ) p 21 > f 2 ( x ) p 12 } , (3.13) X 2 def = { x ∈ X : f 1 ( x ) p 21 < f 2 ( x ) p 12 } hav e po sitiv e λ -measure, then almost ev ery realization x 1: ∞ includes infinitely man y barriers . One can show that these barr iers are th e elemen ts of the set B = X 1 × X 2 × X 1 × · · · × X 2 . Indeed, it can b e shown that the a bsence of no des in a generic subsequence x t : t + T would imply optimality of the likelihoo d motif p ba f a ( x t ) p ab f b ( x t +1 ), a, b ∈ S , a 6 = b . How ever, if x t : t + T ∈ X b × X a × X b × · · · and T is sufficien tly la rge, then this motif will no longer be optimal, hence a no de inside x t : t + T . In [ 28 ], we a dditionally s ho w that bar riers (or no des) also exist in case 2, even if only o ne o f the s ets in ( 3.13 ) has p ositiv e measure. Since a t ypical Viterbi path in ca s e 2 oscillates betw ee n the states (a s also ackno wledg ed in [ 5 ]), case 2 is no t s imilar to case 1 , requiring a different approa c h to prove the existence of bar riers (or no des) under the weakened assumption max { λ ( X 1 ) , λ ( X 2 ) } > 0. This also explains why we generally ( K ≥ 2 ) require ( 3.11 ) to hold for more than one state. In [ 5 ], the author rep orts s imila r r esults, Theo r ems 1 0 and 1 1, without pro ofs, alleging that the omitted proo fs ar e “very s imila r ” to the resp ectiv e pro ofs of Theo rems 7 and 8 of [ 5 ]. W e are con vinced that proving Theorem 10 of [ 5 ] requir es a n appr oac h different from that of the pro of of Theorem 7 in [ 5 ]. The adjuste d Viterbi tr aining for hid den Marko v mo dels 201 Finally , case 3 is the mixture mo del with w eight s π 1 = p 11 = p 21 , π 2 = p 22 = p 12 . Every observ ation is now a node (Example 2 ). Again, if λ ( { f 1 6 = f 2 } ) > 0 holds, then so do e s ( 3.12 ), say , with the first of its statemen ts. Every elemen t of { x ∈ X : f 1 ( x ) π 1 > f 2 ( x ) π 2 } is then a stro ng 1-barrier of or der 0 and length 1. Therefor e, unlike in Theorems 12 , 13 a nd 14 of [ 5 ], the existence of infinitely many barriers (no des) again follows with no additional assumptions. In summary , barriers allow us to prov e, relatively easily , the e x istence of infinitely many nodes. Alt hough the existence o f barriers is rather obvious for K = 2, the CL T- based pro of of [ 7 ], T heo rem 2, does not a pply if K > 2, necessitating gener alizations such as Lemma 3.1 . F or certain technical r easons, instead of extra cting subsequences of separa ted no des from general infinite sequences of nodes gua ran teed by Lemma 3.1 , we a c hieve node separation by adjusting the no tion of barriers. Namely , note that tw o r th order l -barriers x j : j + M − 1 and x i : i + M − 1 might b e in B with j < i ≤ j + r , implying that the asso ciated no des x j + M − r − 1 and x i + M − r − 1 are not separated. Th us, we imp ose on B the following condition: x j : j + M − 1 , x i : i + M − 1 ∈ B , i 6 = j = ⇒ | i − j | > r. (3.14) If ( 3.14 ) holds, then w e sa y that the ba rriers from B ⊂ X M are sep ar ate d . This is often easy to ac hieve b y a simple extension of B , a s shown in the following example. Supp ose that there exists x ∈ X such that x / ∈ B m for all m = 1 , 2 , . . . , M . All elemen ts of B ∗ def = { x } × B ar e evidently barrier s and, moreov er, they ar e no w separa ted. The follo wing lemma inco rpor a tes a mo re gener a l v ersion of the above example (see [ 26 ], Appendix 5.2, pages 39–40, for proof ). Lemma 3.2. Su pp ose that the assumptions of L emma 3.1 ar e satisfie d. Then, for some inte gers M and r , M > r ≥ 0 , t her e exist B = B 1 × · · · × B M ⊂ X M , q 1: M ∈ S M and l ∈ S such that every x b 1: M ∈ B is a sep ar ate d l -b arrier of or der r (and length M ), q M − r = l , P ( X 1: M ∈ B | Y 1: M = q 1: M ) > 0 and P ( Y 1: M = q 1: M ) > 0 . 4. The alig nmen t pro cess F or the re s t o f this work, w e adopt the assumptions of Lemma 3.2 to guarantee that almost every re a lization of HMM has infinitely man y separa ted barrier s. Every suc h barrier con tains a node. Note that both the barrier and the node encapsula ted in it are therefore observ able via testing the running M -tuples of X 1: ∞ for mem ber ship in B . Based on suc h nodes, we define v : X ∞ → S ∞ to be a pro per decoding by piecewise alignment ( 3.9 ) (and v ( x 1: ∞ ) i = 1 , i ≥ 1 , for x 1: ∞ that do not hav e infinitely man y B - barriers ). Next, w e study prop erties o f the rando m alignment pro cess V 1: ∞ def = v ( X 1: ∞ ). Let M ≥ 0 , B ⊂ X M , r ≥ 0 , l ∈ S and q = q 1: M ∈ S M , as promised by Lemma 3.2 . F or every n ≥ 1, P ( Y n : n + M − 1 = q ) > 0 , γ ∗ def = P ( X n : n + M − 1 ∈ B | Y n : n + M − 1 = q ) > 0 , hence 202 J. L emb er and A. Koloydenko every x n : n + M − 1 ∈ B is a separ ated l -barrier of order r . Next, define, for all n ≥ 1 , U n def = X n : n + M − 1 , D n def = Y n : n + M − 1 , F n def = σ ( Y 1: n , X 1: n ) , as w ell as stopping times ν 0 , ν 1 , ν 2 , . . . , ϑ 0 , ϑ 1 , ϑ 2 , . . . of the filtra tio n { F n + M − 1 } n ≥ 1 : ν 0 def = min { n ≥ 1 : U n ∈ B , D n = q } , ν i def = min { n > ν i − 1 : U n ∈ B , D n = q } ∀ i ≥ 1 , ϑ 0 def = min { n ≥ 1 : U n ∈ B } , ϑ i def = min { n > ϑ i − 1 : U n ∈ B } ∀ i ≥ 1 , with the con ven tion that min ∅ = 0 and max ∅ = − 1 . Note that ϑ i ≤ ν i , i ≥ 0. Stopping times ϑ i ( i ≥ 0) are obser v able via the X process alone, wherea s stopping times ν i ( i ≥ 0) already require knowledge o f the full pro cess ( X 1: ∞ , Y 1: ∞ ). Also, note that ν 0 , ( ν i +1 − ν i ), i ≥ 0 , a re indep enden t and ( ν i +1 − ν i ), i ≥ 0 , are identically distributed. T o every ν i , there corresp onds an l - barrier of order r . This barrier extends ov er the interv al [ ν i , ν i + M − 1] and X τ i is an l -no de of order r , where τ i def = ν i + ( M − 1) − r for ev e r y i ≥ 0. Define T 0 def = τ 0 and T i def = τ i − τ i − 1 = ν i − ν i − 1 for every i ≥ 1 . Prop osition 4.1. E ( T 0 ) < ∞ and E ( T 1 ) < ∞ . Pro of. W e need to sho w that E ν 0 < ∞ and E ( ν 1 − ν 0 ) < ∞ . Let us introduce the following non-ov e rlapping block-v alued pro cesses U b m and D b m , defined b y U b m = X ( m − 1) M +1: mM , D b m = Y ( m − 1) M +1: mM , for all m ≥ 1 , a nd stopping times defined, fo r every i ≥ 1 , by ν b 0 def = min { m ≥ 1 : U b m ∈ B , D b m = q } , (4.1) ν b i def = min { m > ν b i − 1 : U b m ∈ B , D b m = q } , R b 0 def = min { m > 1 : D b m = q } , (4.2) R b i def = min { m > R b i − 1 : D b m = q } . The pro cess D b is c lea rly a time-homogeneo us, finite-state Markov chain. Since Y 1: ∞ is ap eriodic and irreducible, so is D b . Hence, ( D b , U b ) is also an HMM. Since Y 1: ∞ is also stationar y (under π ), q o ccurs in every in terv al of length M with the same p ositive probability (Lemma 3.2 ). In particular, q b elongs to the state spac e of D b . Since D b is irreducible and its state space is finite, all of its s tates, including q , are positive recurrent. Hence, E ( R b 0 ) < ∞ and E ( R b 1 − R b 0 ) < ∞ . The follo wing b ound ultimately yields the s econd statement: E ( ν 1 − ν 0 ) ≤ E ( ν b 1 − ν b 0 ) = 1 γ ∗ E ( R b 1 − R b 0 ) < ∞ . This bound is obtained b y t wice a pplying W ald’s equa tio n [ 3 ]. The adjuste d Viterbi tr aining for hid den Marko v mo dels 203 It can similarly b e verified that E ( ν b 0 ) = γ ∗ E ( R b 0 ) + 1 − γ ∗ γ ∗ E ( R b 1 − R b 0 ), which is aga in finite. Finally , E ν 0 ≤ M ( E ν b 0 − 1) + 1 < ∞ . According to Prop osition 4.1 ab ov e, E T i < ∞ for e very i ≥ 0 , implying that the rando m v ariables T 0 , T 1 , . . . form a delay ed renew al proces s (for a g eneral reference, see, e.g., [ 3 ]). In [ 5 ], the pro cess τ and the expectatio n E T 1 are denoted by S and E ( S 1 | S 0 ), resp ectively . As the proo f of P ropo s ition 4.1 above shows, using the ba r riers, it is rela tiv ely easy to prov e that E T 1 < ∞ . On the other hand, without suc h a unifying co ncept, [ 5 ] must prov e E ( S 1 | S 0 ) < ∞ separately for every case considered therein. Next, let u 0 , u 1 , . . . be the lo cations of r th order l -no des co rrespo nding to the stopping times ϑ i , that is, u i = ϑ i + ( M − 1) − r for ev ery i ≥ 0 . Clea rly , for every i ≥ 0 , τ i = u j for some j ≥ i . Also, since the barrie r s are sepa rated, so are ( u i ) i ≥ 0 . Using these no des, we build the alignment v a nd th us extend the definitions of the empirica l measures ˆ P n l ( ψ , X 1: n ) giv en in ( 2.3 ) and the estimators of trans itio n probabilities ˆ p n ij given in ( 2.2 ) for the general case of non-unique alignments. Sp ecifically , given X 1: n , define V ′ 1: n = v ( X 1: n ) to be the (finite) piecewise prop er alignment based on the u i ’s (and a consisten t selection scheme) in accorda nce with ( 3.9 ). F or each state l ∈ S that a ppears in V ′ 1: n , define ˆ P n l ( A ; ψ , X 1: n ) def = P n i =1 I A ×{ l } ( X i , V ′ i ) P n i =1 I { l } ( V ′ i ) , A ∈ B . F or other l ∈ S (i.e., P n i =1 I { l } ( V ′ i ) = 0 ), define ˆ P n l ( ψ , X 1: n ) to b e an arbitrary probability measure. Similarly , for every pair of states l , j ∈ S , w e define ˆ p n lj ( ψ , X 1: n ) def = P n − 1 i =1 I { l } ( V ′ i ) I { j } ( V ′ i +1 ) P n − 1 i =1 I { l } ( V ′ i ) . Again, if P n − 1 i =1 I { l } ( V ′ i ) = 0 , define ˆ p n l · ( ψ , X 1: n ) to b e a n a rbitrary probability vector on S . W e shall next consider the 2- dimensio nal proces s Z def = ( X 1: ∞ , V 1: ∞ ) . Ba s ed on Z , for every l ∈ S , w e a lso define auxiliary empirical measures ˆ Q n l and ( ˆ q n lj ) j ∈ S as follows: ˆ Q n l ( A, Z 1: n ) def = P n i =1 I A ×{ l } ( X i , V i ) P n i =1 I { l } ( V i ) = P n i =1 I A ×{ l } ( Z i ) P n i =1 I { l } ( V i ) , A ∈ B , ˆ q n lj ( Z 1: n ) def = P n − 1 i =1 I { l } ( V i ) I { j } ( V i +1 ) P n − 1 i =1 I { l } ( V i ) for ev ery j ∈ S. As in the definition of ˆ P n l ( ψ , X 1: n ), if l 6 = V i , i = 1 , . . . , n ( i = 1 , . . . , n − 1), then ˆ Q n l ( Z 1: n )’s ( ˆ q n l · ( Z 1: n )’s) a re defined arbitrarily . Note that, in g eneral, v ( x 1: ∞ ) 1: n 6 = v ( x 1: n ). Howev er, the tw o ar e equal up to the last no de o ccurring prior to n and used in the co nstruction of v . Th us, after that las t no de, V ′ i need no longer a g ree with V i . 204 J. L emb er and A. Koloydenko T o prov e the existence of Q l such that ˆ P n l ( ψ , X 1: n ) ⇒ Q l ( ψ ) a.s., we fir st note that Z is a regenerative pro cess [ 3 ] with resp ect to the r e newal times ( τ i ) i ≥ 0 . This implies that ˆ Q n l ( Z 1: n ) ⇒ Q l ( ψ ), a.s. Finally , since the difference b et ween ˆ Q n l ( Z 1: n ) and ˆ P n l ( ψ , X 1: n ) v anishes a s n → ∞ , w e ha ve ˆ P n l ( ψ , X 1: n ) ⇒ Q l ( ψ ) almost sur ely . Similarly , w e prov e the almost sure con vergence ˆ p n lj ( ψ , X 1: n ) → q lj ( ψ ). The fact that the pro cess Z is reg e ner ativ e is cr ucial and is the main result in [ 5 ], Theorem 2. That X is regenerative immediately follows fr o m the fact that for ev er y i ≥ 0, Y τ i = l and the T i ’s are renewal times. V is regenerative beca use all the no des o ccurring at τ i ’s are used in the construction of V 1: ∞ via ( 3.9 ) and becaus e dec o ding V 1: ∞ is pro per. That is, for every i ≥ 1 , V τ i − 1 +1: τ i = v j ∈ W l ( l ) ( X τ i − 1 +1: τ i ) fo r some j ≥ i . Hence, for ev er y i ≥ 1 , the alignmen ts up to τ i and after τ i are indep enden t a nd V τ i +1: ∞ agrees with V τ 1 +1: ∞ in distribution. Regenerativity of Z with resp ect to ( τ i ) i ≥ 0 follows straightforw ardly and we refer to the formal proof of [ 5 ], Theorem 2, for details. Theorem 4.1. If X satisfies the assumptions of L emma 3.1 , t hen ther e exist pr ob ability me asur es Q l ( ψ ) , l ∈ S , such t hat ˆ Q n l ( ψ , X 1: n ) ⇒ n →∞ Q l ( ψ ) and ˆ P n l ( ψ , X 1: n ) ⇒ n →∞ Q l ( ψ ) almost sur ely. Pro of. The pro of b e low uses regener a tivit y of Z in a standard wa y . F or every n ≥ τ 0 , A ∈ B a nd l ∈ S , we have 1 n n X i =1 I A ×{ l } ( Z i ) = 1 n τ o X i =1 I A ×{ l } ( Z i ) + 1 n τ k ( n ) X i = τ 0 +1 I A ×{ l } ( Z i ) + 1 n n X i = τ k ( n ) +1 I A ×{ l } ( Z i ) , (4.3) where k ( n ) = max { k : τ k ≤ n } is a lso a renewal pro cess. No w, since τ 0 < ∞ a .s., we have 1 n τ 0 X i =1 I A ×{ l } ( Z i ) ≤ τ 0 n − → n →∞ 0 , a.s. Let M def = E T 1 , whic h is finite b y P ropo s ition 4.1 . Then, ( n − τ k ( n ) ) /n ≤ T k ( n )+1 /n → 0, a.s. Finally , since Z is r egenerative with respec t to τ 0 , τ 1 , . . . , w e hav e 1 n τ k ( n ) X i = τ 0 +1 I A ×{ l } ( Z i ) = k ( n ) n 1 k ( n ) k ( n ) X k =1 ξ k , where ξ k def = τ k X i = τ k − 1 +1 I A ×{ l } ( Z i ) , k ≥ 1 , and are i.i.d. Let m l ( A ; ψ ) def = E ξ k . Since m l ( A ; ψ ) ≤ M < ∞ , it holds that, as n → ∞ , n k ( n ) → M and 1 k ( n ) k ( n ) X k =1 ξ k → m l ( A ; ψ ) a.s. , The adjuste d Viterbi tr aining for hid den Marko v mo dels 205 implying that ( 4.3 ) tends to m l ( A ; ψ ) / M a.s. Similarly , 1 n n X i =1 I { l } ( V i ) → w l M ≤ 1 a .s., where w l ( ψ ) def = E τ k X i = τ k − 1 +1 I { l } ( V i ) ! . Hence, w e ha ve shown that for each l ∈ S and every A ∈ B , ˆ Q n l ( A ; Z 1: n ) − → n →∞ Q l ( A ; ψ ) , a.s., where Q l ( A ; ψ ) def = m l ( A ; ψ ) /w l . It is easy to note that A 7→ m l ( A ; ψ ) is a measure and that m l ( X ; ψ ) = w l ( ψ ) . Hence, every Q l ( ψ ) ( l ∈ S ) is a proba bilit y measure. Recalling that X is a separable metric space and in voking the theor y of weak co n vergence of mea s ures now establishes that ˆ Q n l ( Z 1: n ) ⇒ n →∞ Q l ( ψ ) almost surely . It remains to show that for a ll l ∈ S and A ∈ B , ˆ P n l ( A ; ψ , X 1: n ) − → n →∞ Q l ( A ; ψ ) , a.s. (4.4) T o see this, consider P n i =1 I A ×{ l } ( X i , V ′ i ). Since V ′ i = V i for i ≤ τ k ( n ) , w e obtain 1 n n X i =1 I A ×{ l } ( X i , V ′ i ) = 1 n τ 0 X i =1 I A ×{ l } ( Z i ) + 1 n τ k ( n ) X i = τ 0 +1 I A ×{ l } ( Z i ) + 1 n n X i = τ k ( n ) +1 I A ×{ l } ( X i , V ′ i ) a . s . − → n →∞ m l ( A ; ψ ) / M . Similarly , 1 n P n i =1 I { l } ( V ′ i ) − → n →∞ w l / M almost surely . Corollary 4.1. If X 1: ∞ satisfies the assumptions of L emma 3.1 , then, for every l ∈ S , ther e exists a pr ob abili ty me asur e q l 1 , . . . , q lK on S s u ch t hat ˆ p n lj ( ψ ; X 1: n ) − → n →∞ q lj ( ψ ) and ˆ q n lj ( Z 1: n ) − → n →∞ q lj ( ψ ) almost sur ely. Pro of. The pro of is the sa me as that of Theorem 4.1 , with q lj ( ψ ) def = w lj ( ψ ) w l ( ψ ) , w lj ( ψ ) def = E τ 2 X i = τ 1 +1 I { l } ( V i ) I { j } ( V i +1 ) ! . 206 J. L emb er and A. Koloydenko 5. Conclusion W e have prop osed, in [ 27 ], [ 24 ] and in this work, to impro ve the precision of the VT estimation by enabling the estimation algo rithm to asymptotically co nfirm the true pa- rameters. In this w ork, we hav e dev elop ed the central theoretical comp onent of the a bov e methodo logy . Namely , we hav e constructed a suitable infinite Viterbi deco ding pro c e s s and have used it to pro ve the exis tence of the limiting distributions r e s ponsible for the ‘fixed p o in t bias’ in a v ery gener al c la ss of HMMs. Gener al approaches to the efficien t computing of the co rrection functions hav e b een recently prop osed in [ 24 ]. Mo del-sp ecific implemen tations of these approaches are a sub ject of the authors’ contin uing inv estiga - tion. Ac kno wledgemen ts The first author has been s upported by Esto nia n Science F oundation Gran t 5694. The authors ar e thankful to EURANDOM (The Netherlands) and Pr ofessors R. Gill and A. v an der V a a rt for their supp ort. The authors also tha nk the anonymous referees and Asso ciate E ditor for their critical and constructive comments whic h have help ed to improv e this man us c ript. References [1] Baum, L.E. and Petrie , T. (1966). Statistica l inference for probabilis tic functions of finite state Marko v c hains. A nn. Math. Statist. 37 155 4–1563 . MR020226 4 [2] Bilmes, J. (1998). A gentle tutorial of th e EM alg orithm and its application to parameter estimation for Gaussian mixture and hidden Marko v mod els . T echnical Rep ort 97–021, Internatio nal Computer Science Institute, Berkel ey , CA, US A. [3] Br ´ emaud, P . (1999). Markov Chains: Gibbs Fields, M onte Carlo Simulation, and Queues . New Y ork: Springer. MR168963 3 [4] Brya nt, P . and Will iamson, J. (1978). Asymptotic behaviour of cl assification maxim um lik elihoo d estima tes. Bi ometr ika 65 273–281. [5] Caliebe, A. (2006). Prop erties of the maximum a p osteriori path estimator in hidden Marko v models. IEEE T r ans. Inf orm. The ory 52 41–51. MR2237334 [6] Caliebe, A. (2007). Priv ate comm unication. [7] Caliebe, A. and R¨ osl er, U. (2002). Conv ergence of the maximum a posteriori path estimator in hidden Marko v models. IEEE T r ans. Inf orm. The ory 48 1 750–17 58. MR192999 1 [8] Capp ´ e, O., Mouli nes, E. and Ryd´ en, T. ( 2005). Infer enc e in Hi dden Markov Mo dels . New Y ork: Springer. MR215983 3 [9] Celeux, G. and Go v aert, G. (1992). A classification EM algorithm fo r clustering and tw o stochastic versions. Comput. Stat ist. Data Ana l. 14 315–332 . MR119220 5 [10] Chou, P ., Lo okbaugh, T. and Gray , R. (198 9). Entrop y- constrained v ector quantiz ation. IEEE T r ans. A c oust. Sp e e ch Signal Pr o c ess. 37 31–42. MR097303 8 [11] D urbin, R., Eddy , S., Krogh, A. and Mitchison, G. (1998). Biolo gic al Se quenc e Analysis: Pr ob abilistic Mo dels of Pr oteins and Nucleic Acids . Cam bridge Univ. Press. The adjuste d Viterbi tr aining for hid den Marko v mo dels 207 [12] Edd y , S. (200 4). Wh at is a hidden Mark ov model? Natur e Biote chnolo gy 22 1315–1316 . [13] Ehret, G., R eic henbac h , P ., Schindler, U. et al. (200 1). DNA binding sp ecificit y of differen t STAT proteins. J. Biol. Chem. 276 6675–66 88. [14] Eph raim, Y. and Merhav, N. (2002). Hidden Marko v pro cesses. IEEE T r ans. Inform. The- ory 48 1518 –1569. MR19094 72 [15] F raley , C. and R aftery , A.E. (2002). Model-based clustering, discriminant analysis, and density estima tion. J. A mer. Statist. Asso c. 97 611–631 . MR195163 5 [16] Genon- Ca talot, V., Jean theau, T. and Lar ´ edo, C. (2000). Sto c h astic volati lit y mo dels as hidden Marko v mod els and statistical applications. Bernoul li 6 1051–10 79. MR180973 5 [17] Green, P .J. and Richardson, S. (2002). Hidden Marko v models and disease mapping. J. Amer . Statist . Asso c. 97 1055–1070. MR195125 9 [18] H uang, X., Ariki, Y. and Jac k, M. (1990). Hidden Markov Mo dels for Sp e e ch Re c o gnition . Edinburgh Univ. Press. [19] Jelinek, F. (1976). Con tinuous sp eec h recognition by statistical meth ods. Pr o c. IEEE 64 532–55 6. [20] Jelinek, F. (2001). Statistic al Metho ds for Sp e e ch R e c o gnition . MIT Press . [21] Ji, G. and Bilmes, J. (2006). Ba ck off model training using partially observed data: Ap pli- cation to dialog act tagging. In Pr o c. Human L anguage T e chn. Conf. NAACL, Main Confer enc e 280–287. New Y ork City , USA: Association for Computational Linguistics. Av ailable at http://www .aclweb.or g/anthology/N/N06/N06- 1036 . [22] Juang, B.-H. and Rabiner, L. (19 90). The seg menta l K-means algorithm for esti mating parameters of hidden Mark ov mo dels. IEEE T r ans. A c oust. Sp e e ch Signal Pr o c. 38 1639–1 641. [23] K oga n, J. A. (1996). Hidden Marko v models estimati on via the most informativ e stop- ping times for the Viterbi algorithm. In Image Mo dels (and Their Sp e e ch Mo del Cousins) (Minne ap olis, MN, 1993/1994 ) . IMA V ol. Math. Appl. 80 115–13 0. N ew Y ork: Springer. MR1435746 [24] K olo ydenko, A., K¨ a¨ arik, M. and Lem b er, J. (2007). On adjusted Viterbi training . A cta Appl. Math. 96 309–3 26. MR232754 4 [25] K rogh, A. (1998). Computational M eth o ds in Mole cular Biolo gy . Amsterdam: North - Holland. [26] Lemb er, J. and Kolo y denk o, A. (2007). Adjusted Viterbi training for hidden Marko v mo dels. T echnical Rep ort 07-01, School of Mathematical Sciences, Nottingham Univ. Ava ilable at http://arxiv.o rg/abs/0709 .2317v1 . [27] Lemb er, J. and K olo ydenko, A . (2007). Adjusted Viterbi training: A proof of concept . Pr ob ab. Eng. Inf. Sci. 21 451–4 75. MR234806 9 [28] Lemb er, J. and K olo ydenko, A . (200 7). I n finite Viterbi alignments in the tw o-state hidden Mark o v mo dels. In Pr o c. 8th T artu Conf. Multivariate Statist. T o appear. [29] Leroux , B.G. (1992). Maxim um-likel ihoo d estimation for hidd en Marko v mo dels. Sto chastic Pr o c ess. Appl. 40 127–143. MR114546 3 [30] Li, J., Gra y , R.M. and Olshen, R.A. (2000). Multiresolution image cla ssification b y hier- arc hical mo deling with t wo-dimensional hidden Marko v models. IEEE T r ans. Inform. The ory 46 1826– 1841. MR179032 3 [31] Lind gren, G. (1978). Mark o v regime models for mixed distributions and switching regres- sions. Sc and. J. Statist. 5 81–91. MR049706 1 [32] McDermott, E. and H azen, T. (2004). Minim um clas sification error training of landmark models for real-time contin uous sp eec h recognitio n. In Pr o c. ICASSP . [33] McLachlan, G. and P eel, D. (2000). Fini te Mixtur e Mo dels . N ew Y ork: Wiley . MR178947 4 208 J. L emb er and A. Koloydenko [34] Merhav, N . and Ephraim, Y. (199 1). Hidden Marko v modelling using a dominant state sequence with application to sp eec h recognitio n. Comput. Sp e e ch L ang. 5 327–339. [35] N ey , H., Steinbiss, V., Haeb-Umbac h, R. et al. (1994). An ov erview of the Philips research system for large v ocabulary contin uous sp eec h reco gnition. Int. J. Patt ern R e c o gnit. Ar tif. Intel l. 8 33–70. [36] O c h, F. and N ey , H. (2000). Imp ro ved statistical a lignment mod els. In Pr o c. 38th A nn. Me et. Asso c. Comput. Linguist. 440–447. Asso ciati on for Computational Linguistics. [37] O hler, U., Niemann, H., Liao, G. and Rubin, G. (2001). Join t mo deling of DNA sequence and ph y sica l properties to improve euk aryotic promoter recognition. Bioinformatics 17 S199–S206. [38] Padmanabhan, M. and Pichen y , M. (2002). Large-vocabulary sp eec h recognition algorithms. Computer 35 42–50. [39] R abiner, L. ( 1989). A tutorial on hidden Mark o v mo dels an d selected applications in sp eec h recognition. Pr o c. I EEE 77 257– 286. [40] R abiner, L. and Juang, B. (1993 ). F undamen tals of Sp e e ch R e c o gnition . Upp er Saddle River, NJ: Prentice-Hall. [41] R abiner, L., Wilpon, J. and Juang, B. (1986). A segmen tal K-means training procedure for connected word recognition. A T&T Te ch. J. 64 21– 40. [42] R yden, T. (199 3). Consisten t and asymptoticall y normal parameter estimates for hidden Mark o v mo dels. Ann. Sta tist. 22 1884–1895. MR132917 3 [43] S abin, M. and Gray , R. (1986). Global converg ence and empirical consistency of the gen- eralized Lloyd algori thm. IEEE T r ans. Inf. The ory 32 148 –155. MR083840 6 [44] S clo ve, S. (1983). Application of the conditional p opulation-mixture mo del to image seg- mentati on. IEEE Tr ans. Pattern Anal. Mach. I ntel l. 5 428–433. [45] S clo ve, S. (1984). Auth or’s reply . I EEE Tr ans. Pattern Anal. Mach. Intel l. 5 657–658. [46] S h u , I., Hetherington, L. and Glass, J. (2003). Baum– Welch training f or segmen t-b ased speech recognition. In Pr o c e e dings of IEEE 2003 A utomatic Sp e e ch R e c o gnition and Understan ding W orks hop 43–48 . [47] S tein biss, V., N ey , H., Au b ert, X. et al. (1995). The Philips researc h system for conti nuous- speech recognition. Phi lips J. R es. 49 317–3 52. [48] S tr¨ om, N., Hetherington, L., Hazen, T., S andness, E. and Glass, J. (1999). A coustic mo del- ing improv ements in a seg ment-based sp eec h recognizer. In Pr o c e e dings of IEEE 1999 Au tomatic Sp e e ch Re c o gnition and Understanding Workshop 139–14 2. [49] Titterington, D.M. (1984). Comments on “Application of the conditional population- mixture model to image segmentati on”. I EEE Tr ans. Pattern Anal. Mach. Intel l. 6 656–65 7. [50] W essel, F. and Ney , H. (2005). Unsup ervised training of acoustic models for large vocabulary con tinuous speech recognition. IEEE T r ans. Sp e e ch Audio Pr o c ess. 13 23–31. R e c eive d April 2007 and r evise d Sept emb er 2007
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment