Delay Constrained Scheduling over Fading Channels: Optimal Policies for Monomial Energy-Cost Functions
A point-to-point discrete-time scheduling problem of transmitting $B$ information bits within $T$ hard delay deadline slots is considered assuming that the underlying energy-bit cost function is a convex monomial. The scheduling objective is to minim…
Authors: ** Juyul Lee, Nihar Jindal – Department of Electrical, Computer Engineering
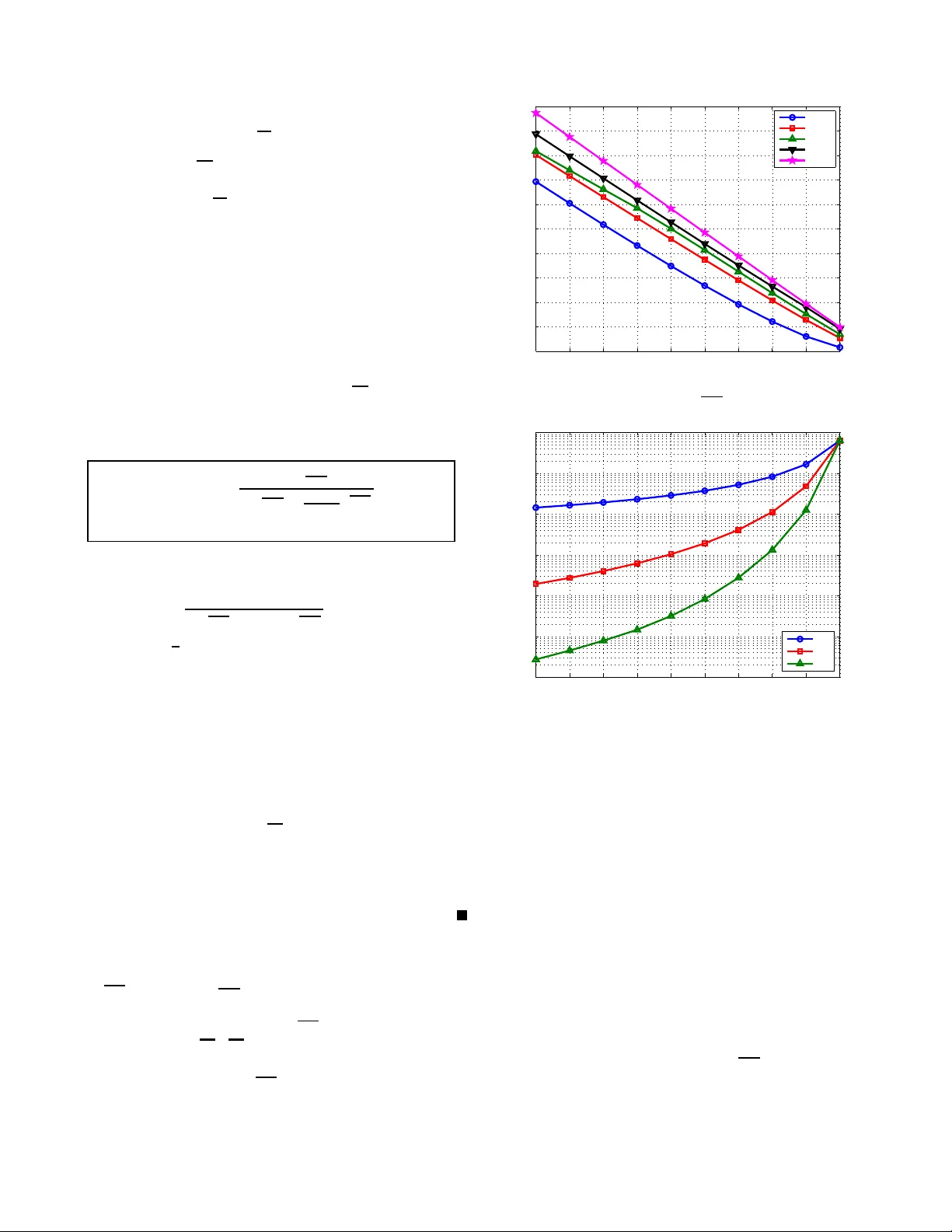
Delay Constrained Scheduling o ver F ading Channels: Optimal Policies for Monomial Energy-Cost Functions Juyul Lee and Nihar Jindal Departmen t of E lectrical an d Com puter En gineerin g University of Min nesota E-mail: { juyul, nihar } @umn. edu Abstract — A point-to-point discrete-time sched uling problem of transmitting B information bits within T hard d elay deadlin e slots i s consi dered assuming th at th e un derlying energy-bit cost function is a con v ex monomial. The schedulin g objecti ve is to minimize the expected energy expenditure while satisfying the deadline constraint based on inf ormation about the unserv ed bits, channel state/statistics, and t he remaining time slots to the deadline. At each time slot, the scheduling decision is made without knowledge of future channel state, an d thus th ere is a tension between serving many bits wh en the current channel is good versus lea ving too many bits f or the deadlin e. Und er the assumption th at no other p acket i s scheduled co ncurrently and no outage i s allowed, we derive the optimal scheduling policy . Furthermore, we also in vestigate the d ual problem of maximizing the nu mber of t ransmitted bits ov er T time slots when subject to an en ergy constraint. I . I N T RO D U C T I O N An o pportu nistic schedulin g p olicy that adapts to the time- varying behavior of a wireless channel can achiev e energy- efficient commun ication on the a verage in a long-term perspec - ti ve. Howe ver , this opportun istic app roach may n ot b e appro - priate for short-term d eadline constrained tra ffic. Th is paper considers schedu ling a pa cket over a finite time ho rizon wh ile efficiently adaptin g to wireless (fading) ch annel variations and taking care of the deadline co nstraint. Our p rimal p roblem setting is the minimization of energy expenditure subjec t to a ha rd dead line constra int (i.e ., a packet of B bits m ust be scheduled within finite T discrete-time slots) assuming that the scheduler has causal knowledge of the chann el state informa tion (CSI) . Causal CSI mean s that the scheduler knows the p ast and current CSI perfectly , but does n ot k now future CSI. The sch eduler is then required to make a decision at each time slot gi ven the numb er of unserved bits, the n umber of slots left befor e the d eadline, and causal CSI, in order to minimize the total en ergy expen diture. At each time slot, the sch eduler deals with the tension between serv ing more b its when the chan nel is good and leaving to o m any bits to the end. L ike wise, we consider the dual (scheduling over a finite time-ho rizon) pro blem of maximizing the transmitted bits subject to a finite energy co nstraint. W e also br iefly d iscuss scheduling pr oblems when the CSI is av ailable non -causally . W e assume that no other packet is sched uled simultaneou sly The work of J. Lee is supported by a Motorol a Partn ership in Research Grant. and the hard d elay deadline mu st be met (i.e., no outage is allowed). These finite-time horizo n sch eduling pro blems can be ap plicable to regularly arriving pac kets with h ard delay deadlines, e. g., V oIP an d v ideo streaming. Delay c onstrained sched uling over fading ch annel ha s been studied fo r various traffic models and delay co nstraints. Uysal- Biyikoglu and El Gamel [1] con sidered scheduling random packet arr iv als over a fading chann el and thus adapt (transmit power/rate) to b oth th e chann el state an d queu e state, and generally try to m inimize average delay . Many referen ces can be found in [1] . Most cases do not admit analy tical clo sed- form solution for cau sal (or online) schedu ling. Instead, they propo sed causal algorithm s with heuristic modificatio ns fr om non-ca usal (offline) policies. References [2 ]–[4] take a sligh tly different perspecti ve: single packet schedulin g (no queu e) with a hard delay d eadline rather than an average delay constraint. The subject of this pape r is th e single-packet sch eduling problem of [2] specialized to the case where the required energy E to transmit b b its u nder chan nel state g is governed by a conve x m onom ial f unction, i.e., E = b n /g , where n denotes the m onomia l order . The b iggest ad vantage of u sing this mon omial cost fun ction is that it yields c losed-for m so- lutions in various scenar ios, unlike the Shann on-cost fun ction setting de scribed in [4]. As a resu lt, it provides in tuition on the interplay b etween th e monomial o rder, delay deadlin e, and the channel states so th at it ultimately suggests general ideas for a more gener al energy -cost f unction. Although the monom ial cost does not h old for operating at cap acity in an A WGN chan nel, a ccording to Zafer and Modiano [5] and their refe rence [6], there is a practica l modu lation scheme that exhibits an en ergy-bit rela tion that can be well approx imated by a mono mial. Ac tually , Zafer and Modin ano [5] consider ed the same p roblem but for a continuo us-time Markov process channel in continuou s-time schedu ling, i.e. , the scheduler can transmit at any tim e instant r ather than discrete slotted time. Although they pr ovided a solution in the form of a set o f differential equation s, it is not p ossible to g iv e a closed- form solution. On th e oth er hand , we are able to deri ve a closed- form description of the optimal scheduler for the simpler block fading m odel (note that the co ntinuo us mod el is somewhat incompatib le with block fading). In this pap er , we derive o ptimal sch eduling p olicies for delay-co nstrained schedu ling wh en the energy-bit cost is a Scheduler (energy/bit) , B T User t g wireless channel additive noise Fig. 1: Point-to -point delay constraine d schedulin g conv ex mon omial fu nction. W e also investigate the d ual p rob- lem o f maxim izing the nu mber of bits to transmit with a finite energy budget over a finite time horizo n. In all cases, we are able to fin d an alytical expre ssions that are function s of the queu e state variables (energy state for the dual pro blem), current cha nnel state and a q uantity related to the fading distribution. The r esulting op timal schedule rs determine the ratio of the number of bits to be allocate d in the curr ent slot to th e deferred bits. For example, the optim al sched uling ra tio o f the num ber of bits to serve b t (from the rem aining β t bits) at slot t ( t denotes the numb er o f rem aining slots to the deadline) to the number of bits to d efer ( β t − b t ) for the primal energy minimization problem is given by b t : ( β t − b t ) = g 1 n − 1 t : η n,t , (1) where n is the order o f monomial cost function , g t denotes the curr ent channel state, and η n,t denotes a statistical q uantity determined by th e channel distribution and the number of remaining slots t . I t will be shown later tha t η n,t is increasin g with respect to t . If η n,t is small, b t ≈ β t . Howe ver , a s η n,t term incr eases, b t gets more affected by the cha nnel state g 1 n − 1 t . This sug gests that the scheduler behaves very oppor tunistically when the d eadline is far away ( t large) but less so as the deadline app roaches, since η n,t is an increasing function of t . I I . P R I M A L P R O B L E M : E N E R G Y M I N I M I Z AT I O N W e consider the s chedu ling of a packet of B bits in T discrete time slots over a wireless channe l as illustrated in Fig. 1. The schedu ler determ ines the n umber of b its to allocate at each time slot using the fading rea lization/statistics to minimiz e th e total transmit energy while satisfying the delay dead line constraint. T o make the schedu ling problem tractable, we assume that n o other packets are to be sched uled simultaneou sly and that no outage is allowed. Throu ghout th e paper, we use the following no tations: • T : the nu mber of time slots that a p acket of B bits must be tra nsmitted w ithin; th e delay dea dline. • t : discrete- time in dex in descendin g orde r (star ting a t t = T and all the down to t = 1 ); t denotes the number of remaining slots. • g t : th e channel state (in power u nit) a t tim e slot t . • b t : th e nu mber of transmitted bits in slot t (there is no integer constrain t on b t ). • β t : the remain ing bits at th e beginning of time slot t ; the queue state. • E t : th e energy co st in time slot t . The channel states { g t } T t =1 are assumed to b e indepen- dently and identically distributed (i.i.d .). If the scheduler has only causal knowledge of the chann el state (i.e., at slot t , the scheduler knows g T , g T − 1 , · · · , g t but does not kno w g t − 1 , g t − 2 , · · · , g 1 ), we refer to this as causal schedu ling . If th e sche duler h as non -causal kn owledge of the chan- nel state in advance (i.e., at slot T , th e schedule r knows g T , g T − 1 , · · · , g 1 ), we r efer to it as no n-causa l scheduling . This pa per m ainly deals with causal sch eduling p roblem s. In th is p aper, we assume th at the energy expend iture E t is in versely pr oportio nal 1 to the c hannel state g t and is related to the transm itted bits b t by a mo nomial functio n: E t ( b t , g t ; n ) = b n t g t , (2) where n denotes the order of mono mial. If n = 1 , the resultin g optimization become s a linear program and thus a “on e-shot” policy is optimal [7]. W e assume that n > 1 (to be co n vex) and n ∈ R ( n is not necessarily an integer), where R denotes the real number set. A pr actical modulation scheme that exhibits a mo nomial e nergy-cost behavior was illu strated in [5], where the mo nomial o rder is n = 2 . 67 . A scheduler is a sequ ence of fu nctions { b t ( β t , g t ) } T t =1 with 0 ≤ b t ≤ β t . For cau sal scheduling , b t depend s only on the current channel state g t and not on the past and fu ture states because of the i.i.d. assumption a nd c ausality 2 . The optim al scheduler is determined b y minim izing the total expected energy cost: min b T , ··· ,b 1 E " T X t =1 E t ( b t , g t ; n ) # subject to T X t =1 b t = B (3) b t ≥ 0 , ∀ t, where E denotes the expectation operator . I I I . C AU S A L E N E R G Y M I N I M I Z AT I O N S C H E D U L I N G As d one in [2] [4], a seq uential formulation of the optima l causal schedulin g of (3) can be established b y introd ucing a state variable β t as in standard d ynamic p rogram ming [8]. As defined in Section II, β t denotes the remaining b its that summarizes the bit alloc ation up u ntil th e pr evious time step . At time step t , g t − 1 , · · · , g 1 are unkn own but g t is known. Thus, the optim ization (3) become s: min 0 ≤ b t ≤ β t E t ( b t , g t ; n ) + E " t − 1 X s =1 E s ( b s , g s ; n ) b t #! , t ≥ 2 . 1 The 1 /g t depende nce is due to the fact that the recei ved ener gy is the product of the transmitt ed energy E t and the channel state g t . Note, howe ver , that an y other decreasin g function of g t could be con sidered by simply performing a change of varia ble on g t . 2 The i.i.d. assumption m ake s us ignore the past CSI g T , g T − 1 , · · · , g t +1 and the causal ity does not allo w to expl oit the future CSI g t − 1 , g t − 2 , · · · , g 1 . As a result, the decision at each time slot should be made based only on the current CSI g t , i.e., b t ( β , g t ) instead of b t ( β , g T , · · · , g 1 ) . W ith (2), we obtain th e fo llowing DP: J csl t ( β t , g t ; n ) = min 0 ≤ b t ≤ β t b n t g t + ¯ J csl t − 1 ( β t − b t ; n ) , t ≥ 2 β n 1 g 1 , t = 1 , (4) where the first term b n t g t denotes the curr ent ene rgy cost and the second ter m ¯ J csl t − 1 ( β ; n ) = E g [ J csl t − 1 ( β , g ; n )] denotes the cost-to-go fu nction, which is th e expected futu re energy c ost (because f uture chan nel states are u nknown, only expectations can b e c onsidered ) to serve β b its in ( t − 1 ) slots if the optimal con trol policy is used at each fu ture step. Thus, the optimal bit allocation is d etermined by balan cing the cu rrent energy cost and the exp ected f uture energy co st. Becau se of the hard de lay constrain t, all th e u nserved bits mu st be ser ved at t = 1 regardless o f the chan nel con dition, i.e., b 1 = β 1 and thus the r esulting energy cost is given by β n 1 g 1 . This dy namic optimization can be solved: Theor em 1 : The optimal so lution to the causal energy min - imization scheduling pro blem (4) is giv en by b csl t ( β t , g t ; n ) = β t ( g t ) 1 n − 1 ( g t ) 1 n − 1 + “ 1 ξ n,t − 1 ” 1 n − 1 ! , t ≥ 2 β 1 , t = 1 , (5) where the constan ts ξ n,t are d etermined as: ξ n,t = E " 1 ( g t ) 1 n − 1 +(1 /ξ n,t − 1 ) 1 n − 1 n − 1 # , t ≥ 2 , E h 1 g i , t = 1 , (6) and the expected en ergy cost is g iv en by ¯ J csl t ( β ; n ) = β n ξ n,t , t = 1 , 2 , · · · . (7) Pr o of: W e use math ematical ind uction to find b csl t ( · , · ; n ) and ¯ J csl t ( · ; n ) . At t = 1 , (5) and (7) ar e true b y definition . If we sup pose that (7) is true for t − 1 , th e op timization (4 ) becomes J csl t ( β t , g t ; n ) = min 0 ≤ b t ≤ β t b n t g t + ( β t − b t ) n ξ n,t − 1 , (8) whose solutio n is o btained by differentiating the o bjective and setting to zero to result in (5 ). Substituting (5) into (8) and then taking expectation with r espect to g t , we o btain (7). Therefo re, the result follows by inductio n. The sch eduling fun ction (5) can be intuitively explained in the following way . The ratio of the num ber of allocated bits b t to th e nu mber of deferred b its ( β t − b t ) is e qual to th e r atio of g 1 n − 1 t to ( 1 /ξ n,t − 1 ) 1 n − 1 , i.e., b t : ( β t − b t ) | {z } β t − 1 = ( g t ) 1 n − 1 : η n,t |{z} threshold (9) where η n,t = (1 /ξ n,t − 1 ) 1 n − 1 . As expected, the optimal scheduler is oppo rtunistic in tha t the numb er of transmitted bits are p ropor tional to the chann el quality . Fu rthermo re, the 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10 t (1/ ξ n,t ) 1/n−1 n=2 n=4 n=6 n=20 n=100 (a) (1 /ξ n,t ) 1 n − 1 1 2 3 4 5 6 7 8 9 10 10 −5 10 −4 10 −3 10 −2 10 −1 10 0 10 1 t ξ n,t n=2 n=4 n=6 (b) ξ n,t Fig. 2: ξ n,t for the tru ncated e xpon ential rando m variable g with threshold 0 . 001 , i.e., f ( g ) = e − ( g − 0 . 001) if g ≥ 0 . 001 and f ( g ) = 0 if g < 0 . 001 , where f denotes the PDF of g . thresholds η n,t are increa sing in t (shown later) which imp lies that the sche duler is more selective when the delay d eadline is far a way (large t ). When the deadline i s far a way , the s chedu ler transmits a large fraction of the u nserved bits only wh en the chann el state is very good ; b ecause many slots re main until the dea dline, there is still a good ch ance of seeing a very good channel state. On the other han d, as the dead line approa ches (small t ) the schedu ler is still opp ortunistic but must be come less selective because only a f ew opportu nities for good chann el states rem ain before the dead line is r eached. Figure 2 illustrates η n,t = (1 /ξ n,t ) 1 n − 1 and ξ n,t for a truncated exponential distribution. As can be seen in Fig. 2a, η n,t increases with respect to t and this can b e shown analytically: ξ n,t = E 1 g 1 n − 1 t + 1 ξ n,t − 1 1 n − 1 n − 1 ≤ E 1 1 ξ n,t − 1 1 n − 1 n − 1 = ξ n,t − 1 (10) where the in equality is due to g t ≥ 0 . Th is shows the delay- limited oppor tunistic behavior men tioned before. From (7), the value ξ n,t denotes the expected ene rgy cost for a unit b it, i.e., β t = 1 . Th us, ξ n,t , as illustrated in Fig . 2b, shows how mu ch the expected e nergy un it cost (for tran smitting one bit) can be reduced as the time span incr eases. Another intere sting fact is that the po licy (5) utilizes 3 all the time slots. This is because bo th ( g t ) 1 n − 1 and ( 1 /ξ n,t − 1 ) 1 n − 1 are always positive for typ ical fading distributions. For the Shannon co st fu nction pro blem [4] , howe ver , the re exist time slots that a re not utilized d epend ing on th e values of B and T . T his does n ot adm it an analytical solution bec ause the associated co st-to-go function takes a complicated form. A. Special Ca ses In this subsection, we examine the o ptimal policy (5) for two values of n : n = 2 and n → ∞ . 1) Quad ratic Cost ( n = 2 ): By substituting n = 2 in (5 ) and (6), we have b csl t ( β t , g t ; n = 2) = β t g t g t + 1 ξ 2 ,t − 1 ! , (11) where ξ 2 ,t = E 1 g t + 1 ξ 2 ,t − 1 , t ≥ 2 , E h 1 g i , t = 1 . (12) Thus, the allocated b its b t and the def erred b its ( β t − b t ) have the same ratio with g t and 1 /ξ 2 ,t − 1 . 2) Infin ite Order Cost ( n = ∞ ): W e examine the limiting behavior of the sche duling policy (5) as n → ∞ . First, we observe that Lemma 1 : lim n →∞ 1 ξ n,t 1 n − 1 = t. (13) Pr o of: This c an be sh own by the inductio n. When t = 1 , (13) h olds trivially . If we supp ose (13) holds for t − 1 , then lim n →∞ ( ξ n,t ) 1 n − 1 = lim n →∞ E 1 g 1 n − 1 t − 1 + 1 ξ n,t − 1 1 n − 1 n − 1 1 n − 1 = 1 t , (14) 3 A time slot t is called utilized if a positiv e bit is scheduled, i.e., b t > 0 . where the last equality is due lim n →∞ ( E [ φ n ]) 1 n = Max φ an d Max φ de notes th e “effecti ve u pper bound ” o f φ (see Chap. 6 in [9] for mathematical techn icality). Hence , the inductio n follows. Figure 2a illustrates the values of (1 /ξ n,t ) 1 n − 1 for the truncated exponential variable. Th is sho ws that (1 /ξ n,t ) 1 n − 1 is increasing linearly with respect to t fo r large n , whic h ag rees with Lemma 1. W ith th e limit in Lemma 1, we can immediately reach the simplified sch eduling policy sum marized b elow: Theor em 2 : As n → ∞ , the schedulin g p olicy (5) b ecomes the eq ual-bit sched uler, i.e., b csl t ( β t , g t ; n = ∞ ) = β t t , t = 1 , 2 , · · · . (15) That is, when the order of m onomial cost fun ction tends to infinity , sched uling e qual nu mber of bits at every slot regardless of the channel state becomes the o ptimal p olicy . Note that we con sidered only m onom ial orders n > 1 in the deriv ation, as when n = 1 , the o ptimal policy is the one- shot po licy [ 7], w hich co mpletely depen ds on the cha nnel state. From these two extreme cases, we can d educe that the effect o f channel state on th e schedulin g fu nction decreases as the order of mono mial co st function in creases, or in other words the optimal schedu ler beco mes less op portun istic as the monom ial order n incr eases. I V . D U A L P RO B L E M : R AT E M A X I M I Z AT I O N Thus far , we h av e considered problems of minimizing energy expend iture to tran smit fixed B information bits in a finite time horizon T . It is of interest to consider the dual of this, i.e., maxim izing the numb er of bits transmitted with a finite ene rgy E over a finite time horizo n T . W e refer to this as the d ual schedulin g p r o blem , while r eferring to the original problem as the primal scheduling pr ob lem . Negi and Ciof fi [3] con sidered this dual pr oblem for the Shannon energy-b it cost function and provided solution s in DP , b ut not in closed form. In this work, we in vestigate this dual sched uling pr oblem and obtain th e optimal closed -form solution for mono mial cost function s. Since the energy-bit function is assumed to be (2), the associated b it-energy cost function is given b y inverting: b t = ( g t E t ) 1 n . (16) Then the dua l pro blem is giv en by max E T , ··· ,E 1 E " T X t =1 ( g t E t ) 1 n # subject to T X t =1 E t = E (17) E t ≥ 0 , ∀ t. T o derive a DP fo r causal dual schedulin g, we intro duce a state variable E t that den otes the remain ing energy at sl ot t . Thus, the optim ization (17) can be fo rmulated a s W csl t ( E t , g t ; n ) = max 0 ≤ E t ≤E t ( g t E t ) 1 n + ¯ W csl t − 1 ( E t − E t ; n ) , t ≥ 2 ( g 1 E 1 ) 1 n , t = 1 , (18) where ¯ W csl t − 1 ( E ; n ) = E g [ W csl t − 1 ( E , g ; n )] deno tes the cost-to- go f unction for the dual scheduling pro blem. This d ynamic optimization (1 8) can be solved similar to the prim al p roblem and its optima l solution is summarized as follows: Theor em 3 : The optimal causal rate maximizatio n schedu l- ing ( 18) is given b y E csl t ( E t , g t ; n ) = E t ( g t ) 1 n − 1 ( g t ) 1 n − 1 +( ζ n,t − 1 ) 1 n − 1 , t ≥ 2 , E 1 , t = 1 , (19) where ζ n,t = E ( g t ) 1 n − 1 + ( ζ n,t − 1 ) 1 n − 1 n − 1 n n , t ≥ 2 , E [ g 1 n ] n , t = 1 . (20) The o ptimal energy scheduler (19) h as very similar in terpre- tation with the optimal bit schedule r (5) fro m their schedu ling formu lations. That is, the ratio of the amount of ene rgy to schedule E t to the am ount of energy to defer ( E t − E t ) is equal to the ratio of g 1 n − 1 t to ζ 1 n − 1 n,t − 1 , and thus, the similar delay - limited opp ortunistic schedu ling interpre tation can be applied. Notice th at the quan tities ζ n,t and ξ n,t are different. V . N O N - C AU S A L S C H E D U L I N G This section briefly considers the case where the sch eduler has kn owledge of the chann el states non-c ausally in advance, i.e., g T , g T − 1 , · · · , g 1 are known a t t = T . A. Energy Min imization S cheduling In this n on-cau sal setting, th e op timization (3) is simp ly giv en by min b T , ··· ,b 1 T X t =1 b n t g t (21) subject to P T t =1 b t = B and b t ≥ 0 for all t . This is a conve x optimization and can be so lved as: Theor em 4 : The optimal non- causal scheduling to ( 21) is giv en by b ncsl t ( β t , g t ; n ) = β t g 1 n − 1 t P t s =1 g 1 n − 1 s . (22) Pr o of: The standard Lagrang ian metho d [ 10] yields the solution: b ncsl t = B g 1 n − 1 t P T s =1 g 1 n − 1 s . (23) If we express this solution with the queue state v ariable β t , we obtain the result. The sch eduling policy (22 ) can be in terpreted with the ratio argument as with th e causal cases, i.e., b ncsl T : b ncsl T − 1 : · · · : b ncsl 1 = g 1 n − 1 T : g 1 n − 1 T − 1 : · · · : g 1 n − 1 1 . (24) B. Rate Maximization S cheduling Similarly we c an f omulate the n on-cau sal rate m aximition as max T X t =1 ( g t E t ) 1 n , (25) subject to P T t =1 E t = E and E t ≥ 0 for all t . Theor em 5 : The optimal non- causal sched uling to (25) is giv en by E ncsl t = E t g 1 n − 1 t P t s =1 g 1 n − 1 s . (26) Like (24), we can also observe that E ncsl T : E ncsl T − 1 : · · · : E ncsl 1 = g 1 n − 1 T : g 1 n − 1 T − 1 : · · · : g 1 n − 1 1 , (27) and thus, we obtain b ncsl t B = E ncsl t E . (28) This imp lies that the optim al bit distribution ratio du ring the T slots for the pr imal problem is identical to the energy distribution ratio for the dual problem . V I . C O N C L U S I O N W e h av e in vestigated the problem o f bit/energy sched uling over a finite tim e du ration assuming that th e ene rgy-bit cost function is a mon omial. In both the prim al (minimizing energy expenditure subject to a bit constraint) sched uling and the dual (m aximizing bit transmission under an en ergy co nstraint) scheduling pr oblem, we de riv ed closed-fo rm sched uling fun c- tions. The optimal bit/energy allocations are determined by the ratio of g 1 n − 1 t and a channel statistical q uantity . Fro m the monoto nicity of this statistical qu antity , we in terpreted that th e optimal schedule r behaves more op portun istically in the in itial time steps an d less so as the dead line appro aches. R E F E R E N C E S [1] E. Uysal-Biyi koglu and A. E. Gamel, “On adapti ve transmission for ener gy ef ficient in wireless data networks, ” IEEE T rans. Inform. Theory , vol. 50, 2004. [2] A. Fu, E. Modiano, and J. N. Tsitsiklis, “Optimal transmission schedul- ing over a fading channel with ener gy and deadline constraint s, ” IEE E T rans. W ir eless Commun. , vol. 5, no. 3, pp. 630–641, Mar . 2006. [3] R. Negi and J. M. Ciof fi, “Delay -constrain ed capa city with causal feedbac k, ” IE EE T rans. Inform. Theory , vol. 48, no. 9, pp. 2478–2494, Sep. 2002. [4] J. Lee and N. Jindal, “Energy- ef ficient scheduling of delay constrained traf fic over fadi ng channels, ” to appear: IEE E T rans. W ir eless Communu. (preprint av ailab le at http:/ /arxi v .org/abs/080 7.3332). [5] M. Zafer and E. Modi ano, “De lay constrain ed energy ef ficie nt data transmission ov er a wireless fadin g chan nel, ” in W orkshop on Inf. Theory and Appl. , La Jolla, CA, Jan./Feb . 2007, pp. 289–298. [6] M. J. Neely , E . Modiano, and C. E. Rohrs, “Dynamic po wer allocati on and routing for time vary ing wireless networks, ” in Pro c. IEEE INFO- COM , 2003, pp. 745–755. [7] J. Lee and N. Jindal , “ As ymptotic optimal energy-e ffici ent delay con- strained schedule rs over fadi ng channels, ” in preparation . [8] D. P . Bertsekas, Dynamic Pro gramming and Optimal Contr ol , 3rd ed. Mass.: Athena Scientific, 2005, vol. 1. [9] G. Hardy , J. E. Little woo d, and G. P ´ olya, Inequalitie s , 2nd ed. Cam- bridge, 2001. [10] S. Boyd and L. V andenber ghe, Con ve x Optimization . Cambridge , UK: Cambridge Uni v . Press, 2004.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment