A Continuous Vector-Perturbation for Multi-Antenna Multi-User Communication
The sum-rate of the broadcast channel in a multi-antenna multi-user communication system can be achieved by using precoding and adding a regular perturbation to the data vector. The perturbation can be removed by the modulus function, thus transparen…
Authors: Wee Seng Chua, Chau Yuen, Francois Chin
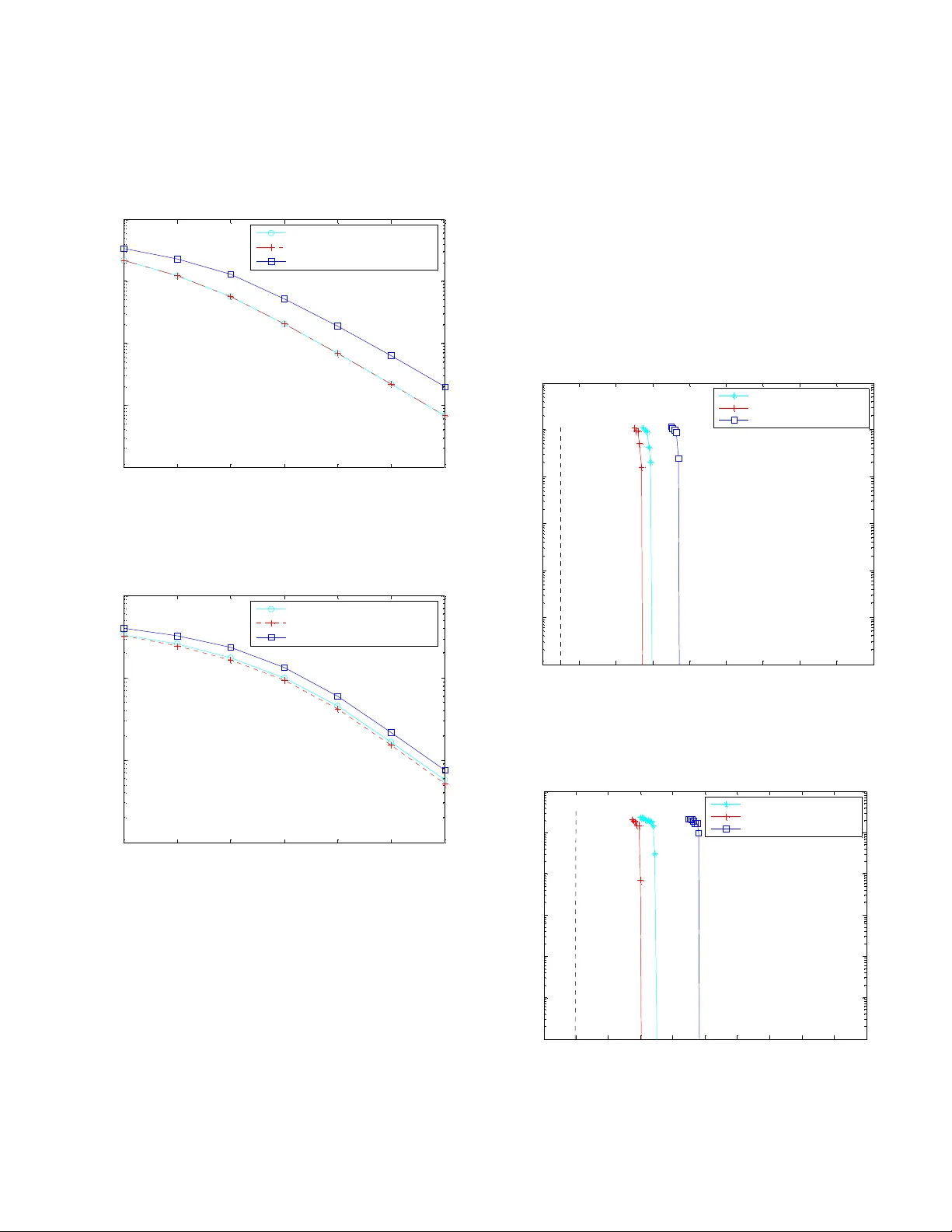
A Continuous V ector- Perturbati on for M ult i- A ntenna Multi-User Communicati on W e e Seng Chua, Chau Yuen and Franco is Chin In sti tut e for In foc om m Res ea r ch ( I 2 R), Sin gap or e {ws ch ua, cyuen , ch in fran cois}@ i 2r. a- st ar. ed u .s g Abst rac t ─ The su m -rat e of t he bro ad cast cha nnel in a mu lti-a ntenn a m u lti-u ser co m mun icatio n sy stem can b e ac hie ved by u si ng prec oding and a dding a re gular pert urb atio n t o th e dat a v ector. T he p ertu rba tio n can b e remo ved by the modu l us functio n, th u s transparent to t he receiv e r, bu t th e info rm atio n o f th e pre cod ing m atrix is need ed to deco de t he sym bo ls. Th is pa per pro p os es a n ew tech niqu e to im pro v e the m u lti-an tenn a m ult i-u ser sy stem , by addi ng a c ontinuous per turbat ion to the da ta vec tor wit hou t th e need of info r m atio n on th e preco din g m atrix to be kn ow n at t he receiv e r. Th e pertu rb atio n v ecto r will be treat ed a s int erfe ren ce at th e re ceiv er, thu s it will be transparent to the receive r. Th e derivatio n of the conti nuous vec tor pe rturbat ion is provided by maximizi ng th e signa l-to -inte rf eren ce plu s n ois e ratio o r min imizin g th e min imu m mean sq u are erro r o f th e rece ived sign a l. Keywords – Mu lti-a nten na m u lti-u s er, vecto r p ertu rb atio n, conti nuous pert u r bat ion. I. I NTRODUCTION Giv e n a mul ti-a n te nna mu lti -use r co mmunic atio n sy stem, wher e a ba se- st a tion wi th M t ran s mi t a ntennas servi n g a po o l of K au ton o m ous user s with on e an t enn a each, th e b a se- st a tion can u se t wo c omm on appr oach es t o a pproa ch th e su m-r a te of th e br oa dca st ch ann el. The first ap pro ac h is to mul tip ly a preco ding mat rix , G as sh own in ( 1 ), t o th e da ta ve ct or u a t th e ba se -s t a ti on be fo r e transmitting. T hi s tec hnique is co mm o n ly kn own as precoding , an d ex am ples of t h e pr ecodi n g matr i ces in clu ded Inv ersi on an d Regu larized Invers i on [1 ], th e one d esi g n ed b y max imiz ing su m- rate [2] o r mini mizi ng t h e bit e rro r rate [3 ] an d etc. Besi d es pr ecodin g, th e bas e-st a ti on can al so ad d pe r t ur bat i on t o t h e da ta ve ct or u c alled ve ctor per turbation denoted as v as s h own in (1). It has b een sh o wn in [4] that by adding a disc rete pe r tu r batio n ve ctor v = ± τ l , w he r e τ is a con st an t va lu e an d l is a v e cto r co n sis ting of o n ly integ e r val u e, t o t h e d a ta vect or, can r edu ce th e en er gy o f t h e t r ans mitte d s ig nal s o as to ac hiev e e xc elle nt su m-r ate. () γ + = Gu v x (1) In (1), γ is a norm aliza tio n co nsta nt to nor malize the to tal tran smi ssion powe r . On e d i stin ct d iffer en ce bet ween th e two app r oa ch es is tha t th e prec o din g mat rix is j us t a fu nctio n of the c hanne l but t he perturbatio n ve ctor depends o n both th e preco din g matr ix (h e n ce th e chann el ) an d th e da ta . Whi l e th e per tur b a tion r ema in ed tran spar ent to th e r eceiv er ( for th e ca se of vect or pe r tu r b atio n i n [4] , t h e p e r tu r b atio n w ill b e r emo v ed by th e modulus f un ct ion [4] o r statistica l deco din g [5] , h owe ver, the pr eco d i n g matr i x ma y or m a y n ot b e kn own t o th e r eceiv er , de p en din g on th e a ssi gn m en t of t h e r e fer en ce pi l ot s i gna l. If the pilo t sig nal is p rec od ed w ith the pre co ding ma tri x, the r ecei ver w ill b e ab le to kno w th e equiv ale nt c ha nn el , i.e . HG , this is c rucia l fo r the d ec od in g o f so me p r ec o ding sc h eme lik e regu la r ize -i n v ersio n w ith QAM co nste llatio n. Ho w eve r, if t he r efer en ce s i gn al i s pr ecoded, t h e r ecei v er w ill n o t be ab le to kn o w it s r a w ch ann el co e ffici en t ( i. e. th e corr espon d ing r ow of H ), t his w ill imp os e s ome prob lems. F o r ex ample , the raw ch an n el coe ffi cien t i s im p ort ant for th e r ecei ver to al er t th e ba se -s t a t i on for ch an gin g th e da t a ra t e or pr ec od i n g ma tr i x . In thi s pa per , we focus on th e ca se th a t th e refer en ce pilot si gn a l is not pr ecoded , hen ce inver s e pr ecodi n g wil l be us ed beca u se t h e eq ui val en t chan n el HG of in ver s e pr ecodin g wil l bec ome a n i d ent it y ma tr ix , whi ch can be kn own t o th e r eceiver be f or e h a n d. We pr opos e a n ew p er t ur ba tion t ech n i q u e th a t us es a c on ti n u ou s pe r t ur bat i on vect or to i mp r ove t h e pe r f ormanc e o f multi-a nte nna mu lti- use r co mmu nicat io n s y st em . Mor eo ver , wh en we com bi n e th e con tin uous pe r tu r b atio n w ith t h e disc re te pe rtu r b atio n, t h e pe rfo r mance is b ette r t han w ith o nly th e dis crete pe rturb atio n alo ne. II. S IG NAL MODEL The mod el fo r the do wnli n k o f a mu lti-a nte nn a multi -us er system i n clud es a base-st ation with M tr an smit an tenn a s an d K user s, each with o n e r ecei v ed a n ten n a can be r epr esen ted by the fo llow in g e qu atio n =+ yH x n (2) wher e y is a K × 1 colu mn vect or wi th el em ent s r epr esen tin g th e r eceiv ed s i gn al s for each us er s, x is a M × 1 vect or de n o ting the no r mal ized tra nsmit ted sig nals i n ( 1) w ith a po wer con str ain t 2 1 = x , n r epr esen t s th e a d dit i ve wh i t e Ga us si an n oise ( AWGN ) wit h cov a r ian ce ma tri x σ 2 I , and H r epr esen ts Ra y l ei gh flat fad in g chann el matr ix, an d each r ow of H, con si s ts of t h e cor r espon din g ch an n el of dif f er en t u sers. We use a 1 × M mat r ix T k H to d en ot e th e ch ann el matr ix bet wee n th e ba s e st a ti on an d th e k -t h u s er . Th e r ecei ved s ig n al a t th e k -th user is ,1 , , T kki yn k K =+ = Hx … (3) Base d on equatio n s (1) and (2), t h e tra n smitte d signal x can be rew r itte n as () γ + =+ Gu v y Hn (4) Tho ugh in (4 ), w e no rmalize d th e t ra n sm itted s ig nal insta ntaneo usly , it is mo r e p ractic al to no rmal ize t h e tr an sm itt ed si gna l with th e expect ed val u e of γ , w e use t h e ins tanta neo us normal izat io n f or si mpl icity , as it has b een sh own in [ 4] th at th e di ffer en ce i n per fo r man ce bet ween two n orma l iz at ion schem es ar e smal l. III. D ISC RETE PERTUR B ATION Ma ny o ptimiza tion algo r it hms h ave bee n propo sed in [6 ], [7] , [8] and [9] to ma xim iz e t h e throug hput fo r fixe d tran smiss io n po wer , an d [ 1 0] h a s pr ovid e a c om p ar is on bet wee n s ev er a l di ffer ent s chem es. In [4] , the disc r ete vec tor-pe rturb atio n tec hnique , v = ± τ l , is pro pos ed, and i t ca n be imple mented u si n g a si mp lifie d algo rit hm ca lled s phere encod er . Sphere e ncoding uses a simple and e ff icie n t w a y t o ac hiev e cap acity of multi-an tenn a mul ti-us e r co mmun icat ion sy stem. The tra nsm itte d sig nal is () τ γ + = Gu x l (5) wher e () () 2 max ,2 2 c γτ τ =+ = + ∆ Gu l τ is t he pe rturb atio n inte r val c hos en to p r o vide a s y mmetric deco din g regio n arou n d ev ery signal co n stel la tio n poi nt. max c is t he ab so lute value o f the large st m ag nitude amo ng the co n ste llatio n sy mbo ls, and ∆ is t he se pa r atio n be twee n the co n ste llatio n po ints. l is a K × 1 vector wh ose el em en t s con s is ts of r eal an d ima g inar y i n t eger s. Th e choi ce of l is o btai ned b y minimiz ing γ . () ( ) () *1 '* ' arg min ττ − =+ + uH H u ' l ll l (6) Si n ce th e va l ue of τ i s kn ow n t o t h e r ecei ver , an d th e effect o f the integ e r mu ltip le o f τ can be remov ed by a modulus f unctio n. () 2 y fy y τ τ τ τ + =− (7) Al t ern ati ve d ecod in g of th e r ecei ved si g n al can be f oun d in [5 ] ba se d on st a t i st i c of p er tur ba ti on . IV . C O NTINUO US PERT UR B AT ION A. With continuo us perturb ation o nly In this sec ti on, w e propo se a c o n tinuous per turbatio n, where v = p . It i s di ffe r e n t fr om d i scr eet p er t ur bat i on , wh er e l c onsis ts of o n ly in teg e r s, p can be an y rea l or com pl ex val ue. Wh en in ver se p r ecodi n g, () 1 − = ** GH H H , is u se d, the r ecei ved si g na l i s () () () () 1 ** noi se intended signal interference γγ γ γγ − + + =+ = + + =+ =+ + HH H u p Gu p yH n H n up n up n (8 ) The firs t te rm on the rig ht hand side is the de sired sig nal, t he sec on d t er m i s con si d e r ed int er fer en ce t o th e d ecoder , an d th e thi r d te rm is the addic tiv e w h ite Gaus si an no ise . The mai n ob jective of adding a co ntin uo us ve ct or p to the data ve ct or is t o a ch i eve a h i gh e r t hr ough put . Th us , an obvi ou s ch oi ce of p is to max imize t h e S INR 2 2 2 SINR K γ σ = + u p (9 ) wher e K ref e rs to t he n um b e rs o f us ers . Th e n or mal iz at i on con stan t γ is () () 2 ** ** ** 2R e γ =+ =+ + Gu p u G Gu u G Gp p G Gp ( 10 ) Wh en ( 9) an d (10 ) combi n ed, i t bec omes () () 2 2 2 * * 2 ** ** * * * 2R e SINR K K D γσ σ = + = ++ + = u p uu pp uG G u uG G p p G G p uu (11) wher e () ( ) *2 * 2 * * 2 * * 2R e DK K K σσ σ =+ + + p I GG p uGG p u GG u Si n ce p is co n tinuous, unlike the sphe r e enco din g scheme in [4] w hich is a d isc r ete valu e, it c an be optimize d a naly tically . Next, w e ar e go ing to derive p by maxi mizing t h e SINR , i n other wo r ds, w e take th e deriv ati ve of (11), w e can maximi z e SIN R by min imiz ing its d e n o minato r D by taking the derivativ e of D w ith re spe ct to p . () 2* 2* 22 D KK σσ ∂ =+ + ∂ IG G p G G u p (12) Ne xt, w e le t 0 D ∂ = ∂ p , to find the op timal p () 1 22 * * KK σσ − =− + p I GG GG u ( 13) Simi lar ly , w e can mi nim ize t h e to tal me an sq ua r e e rro r of th e r ecei ved si g na l t o fin d p . F r o m (8 ), the es tima te s ign al is =+ + γ ûu p n (14) Th e t otal mean squ ar e err or of the r ecei ved si g n al is 2 2 MSE γ =− =+ ûu pn (15) T hus w e c an f i nd p by minimizing (15) by takin g its de r i vati ve. () () 2* 2* 1 22 * * 22 0 MSE KK KK σσ σσ − ∂ =+ + = ∂ =− + IG G p G G u p p I GG GG u (16) It c an b e se en that (16) is t h e s ame as (13), t his im plies that p can be f ound by usin g eit h er maxi m izi ng th e S INR or min i mi zin g th e t ota l m ean s quar e err or of th e r ecei ved si g na l. B. Com bine Con tinu ous Pertu rba tion with Dis cret e Pe rturb atio n In th i s s ecti on, we a r e g oin g t o in vest i gat e th e effect o f co n tinuo us p ertu r batio n w h en it is c o mbine d w ith the d isc r ete pe r t ur bat i on . Wh e n both th e di s cr ete p er t ur bati on ± τ l an d co n tinuous pe r turbatio n p t o th e dat a vector u , i.e . v = ± τ l + p, th e r eceiv ed s i gn al becom es () () nois e intended signal to be removed by modulus fuction i nterference τ γ τ γ τ γγ γ ++ =+ ++ =+ =+ + + Gu p yH n up n up n l l l (17) wher e () 2 γτ =+ + Gu l p Th e va lu e of τ i s k n o wn to t h e r ecei ver , h ence t h e secon d t e r m on the r ight hand side of (17) can be r emo ved by a mo dulus fun ct i on [ 4 ]. Si n ce th e vect or p ert ur ba ti on con si st s of bot h th e con tin u ous an d di scr ete vect or s , th e cost fun ct i on of fi n d in g l by minimizi n g γ in [4] is no lo n ge r val i d. It is fo un d co n tradicti n g as th e va lu e of p beco m es – l to satisfy th e co st fu n ctio n, thu s r esu l tin g in can celin g th e di scr et e per t ur ba tion . Thus, whe n w e find the co n tinuous pe r tu r batio n , the disc r ete perturbatio n can be added to the data ve cto r u to find p . A s a result, t h e c ontinuous pe r turbatio n p becomes () () 1 22 * * KK σσ τ − =− + + pI G G G G u l (18) In th i s pa per , th e ch oice of i n t eg er vector l i s f o und con cur r en t ly wit h th e con t in u ous ve ct or p , w h ic h is m ade w ith th e m odi fied co st fun ct i on th at min imiz es th e tot al mean squ ar e er r or of th e ex pect ed recei ved si gn al . Fro m (1 7), the es timate sig nal is =+ + γ ûu p n (19) Hen ce, th e t ota l mean s quar e err or of th e r ecei ved si gn a l i s 2 2 MSE γ =− =+ ûu pn (20) The choic e of l and p is f ound by minimizing (20) () 2 ' , ,a r g m i n γ =+ ' p' pp n l l (21) Si n ce p is give n in (18), w h en w e combine (18) and (21), the ch oi ce of l bec om es () ( ) () ( ) ( ) 2 ** ** ** 2 ** ** ** 2R e 2R e 2R e 1 22 * * arg min K KK σ σσ τ ++ +× ++ + − =− + + '' uGG u GG pG G p '' u G Gp u G G G Gp IG G G G u ' ll ll ' ll l (22) Or 2 ar g min γ =+ pn ' l l wher e () () 1 22 * * KK σσ τ − =− + + pI G G G G u l an d () ( ) ( ) ** ** ** ** ** ** 2R e 2R e 2R e γ =++ ++ + '' '' uGG u GG pGG p uGG p uGG G G p ll ll V. S I M ULATIO N RESULTS Figure 1 a n d Figure 2 co mpar e inve r se preco di n g w ith con t in uou s p ert ur ba ti on t o th e in ver si on an d r egul ar ize- in ver s i on pr ecod i n g wi th out p er t ur ba ti on us in g un code d QPSK and 16 QAM w i th M = K = 4 r esp ect ivel y . 0 5 10 15 20 25 30 10 -4 10 -3 10 -2 10 -1 10 0 SN R BER Number of us er: 4 wit h 1 antennas and c onst el lat i on si z e: 2. N um ber of a nt ennas at bas e s t at ion: 4. C O NT VECT OR PER T U RBAT I ON REGUL A RIZ E D INV E RS ION C H AN NEL I N VER SI O N Figure 1: Pro bab ilit y of bit error of in verse precod ing wi t h con tinuous pert urbat ion, inverse a nd regula rize-i nversion with o ut pert urbat ion using unco de d QPSK s ymbo ls , M = K =4 0 5 10 15 20 25 30 10 -3 10 -2 10 -1 10 0 SN R BER Number of us er: 4 wit h 1 antennas and c onst el lat i on si z e: 4. N um ber of a nt ennas at bas e s t at ion: 4. C O NT VECT OR PER T U RBAT I ON REGUL A RIZ E D INV E RS ION C H AN NEL I N VER SI O N Figure 2: Pro bab ilit y of bit error of in verse precod ing wi th continu ous pert urbat ion, in verse an d regu l ariz e-in version w ithout pertu r ba t ion us ing un coded 16QA M symb ols, M = K =4 In t he c ase of QPS K, t h e p r o bab ility of bit e rr o r o f the i n ve rs e preco din g with co n tinuo us vec t o r pert urbat i o n is identical t o r e gu l ar ize - in ver s e pr ecodi n g wit h ou t pe rt ur ba ti on . Mor eov er , it has a 5dB gai n ov er th e same pr eco ding witho ut pe r tu r b atio n. L ikew ise , the dif fe rence in p r o bab ility of bit err or bet ween t h e inver s e pr ecodin g con t in uous ve ctor perturbatio n a n d the regul ar ize-i n ve r se prec oding w it h o ut pe r tu r b atio n is n eg lig ible fo r 16QA M. H ow eve r the i n v ersi o n preco din g w ith continuous pe r turbation is a t leas t 2dB b ette r than the same prec oding w it h o ut co n ti n uous pe r turbatio n. It i s wo r th to note that f r om the r esults o f Figure 1 and F igure 2, con t in uou s p er tur ba ti on can be used f or an y con st el l a tion sy mbo ls. Th e com par i s on of the th r ee t ech n iq ues usin g tur bo cod ed 16QAM with M = K = 4, usi n g wit h sy mbol ra te ½ and ¼ r esp ect ivel y i s sh own in Fi gur e 3 and Fi g ur e 4. Th e diff er en ce bet ween th e in vers e pr eco d i n g with con t in uou s vect or perturbatio n and the regu larize-inverse prec oding without any perturbatio n at turbo coded rate ½ an d ¼ is 0.5dB and 1d B respec ti ve l y . Howeve r , in ve r se prec oding w it h co n ti n uous ve ct or per t ur ba t i on i s 1. 5 d B an d 2. 5d B bet t er th an t h e sam e preco din g w ithout pe r turbatio n at turbo co ded r ate ½ and ¼ r esp ect ivel y . 6 8 10 12 14 16 18 20 22 24 10 -6 10 -5 10 -4 10 -3 10 -2 10 -1 10 0 SN R BER N um ber of us er: 4 w i t h 1 antennas and c ons t ell at ion si z e: 4. Num ber of ant ennas at base s tati on: 4. CONT V ECTOR PE RTURBA T ION RE GUL A RIZED INV ER S IO N CHA NNEL INV E RS ION Figure 3: Pro bab ilit y of bit error of in verse precod ing wi th continuou s pert urbat ion, in verse an d regu l ariz e-in version w ithout pertu r ba t ion us ing rat e ½ turbo cod e d 16Q AM symb ols, M = K =4 -2 0 2 4 6 8 10 12 14 16 18 10 -6 10 -5 10 -4 10 -3 10 -2 10 -1 10 0 SN R BER Number of user: 4 wit h 1 ant ennas and c onst el l at ion s i z e: 4. Number of antennas at bas e s t at i on: 4. CONT V ECTOR PERTURBA T ION REGULA RIZ ED I NV ERS ION CHA NNEL INV ERSIO N Figure 4: Pro bab ilit y of bit error of in verse precod ing wi th continuou s pert urbat ion, in verse an d regu l ariz e-in version w ithout pertu r ba t ion us ing rat e ¼ turbo cod e d 16Q AM symb ols, M = K =4 Capaci ty = 7 db Capaci ty = 0 db The res ults in F igu r e 5 sho w s the p rob a b ility of b it error of inve r se preco din g w i th c ontinuous plus discrete pe rturbatio n is b ette r tha n inv erse prec od in g w ith dis crete per turb atio n and regularize-i n ve r se p r ec oding with disc r ete pe r tu r batio n by 1.5dB a nd 0.5dB r es pective l y . 0 5 10 15 20 25 30 10 -5 10 -4 10 -3 10 -2 10 -1 10 0 SNR BER Number of us er: 4 with 1 ant ennas and const el lat i on si z e: 4. Number of antennas at base s t at i o n: 4. I NV PREC O DI N G W / CO N T + D I SCR ET E PER T I NV PREC O DI N G W / DI SC RET E PERT REG- IN V PRECOD IN G W / DISCR E T E PE RT Figure 5: Pro bab ilit y of bit error of in verse precod ing wi t h con tinuous pl us discret e pertu rbation, inverse and regulariz e-invers ion with discret e pert urba tion u sing un coded 16QA M symbols , M = K =4 V. C ONCLUSIONS In this paper, w e sh o w th at by addin g a co n tinuous v ector per tur bat ion t o th e d a ta vect or , wh i ch i s tr eated a s in ter fer ence by t h e r eceiv er , can a chi eve a bett er d ecodi n g per fo r mance th an th e syst em wit h ou t p ertur b a t i o n . Mor eover , th e r ecei ver does n o t n eed a d diti on al tr a inin g for th e pr ecod i ng matr i x. It i s al so wor th t o n ote th a t wh e n th e con t in uous p ert ur ba tion i s c om bi n ed wi th di scr et e p er t ur ba ti on , th e pe r for man ce of t h e inve r se preco din g co n ti n uous plus d iscrete pe rt u r batio n is bett er t h an in ver se pr ecod in g or reg ul ar i z e in ver se p r ecodi n g wit h d i scr ete p er t ur bati on on ly. VI . R EFERENCES [1] C. B. Peel , B. M. Hoch wal d , an d A. L. Swin dl e h urst, “A Ve cto r -Pe rturb atio n Tec hniq ue fo r Ne ar-Ca pacity Mu lti- Ante nna Mul ti-U se r Co mmu n ica tio n – Pa rt I: Ch annel Inve r sio n a nd R egula rizatio n,” IEE E Trans . on Communicat ion ., v ol 53, no. 1, pp. 195-202 , Jan 2005. [ 2] M. St ojn i c, H. Vi k alo, and B. Hassi bi , “Rat e Maxi mizatio n i n Mul ti-A nten na Bro adcas t C h anne ls w ith Lin ear Prepr ocess in g,” IEEE Trans . on W i reless Communicat ion, vo l 5, issue 9 , pp. 233 8-2342, Se p 2006 . [3 ] A. Ca ll ar d, A. Khan dan i, an d A. Saleh , “Vect or Pr ecodi n g w ith MMS E fo r the F ast Fad ing an d Quas i-S tatic Mul ti- User B r oadca st Chan n el, ” 4 0 th Ann ua l Con fer en ce on Informatio n Scie n ces and Sy stems, pp. 1002-1007 , Mar 2006. [4 ] B. M. Ho ch wa ld , C. B. Peel , an d A. L. Swi n d leh ur st, “A Ve cto r -Pe rturb atio n Tec hniq ue fo r Ne ar-Ca pacity Mu lti- Ante nna Mult i-U se r Co mmu n ica tio n – Pa rt I: Per t ur ba tion , ” IEEE Trans. on Comm unication ., vo l 53, no. 3, pp . 537-54 4, Ma r 2005. [5] C. Yue n and B . M. H oc h w a ld, “How to gain 1.5 dB in vect or p r ecodi n g, ” IEEE Glob ecom 2006, av ailab le at http ://w ww .i2 r .a- star .edu .sg/~c y uen/pub licatio n s. html . [6 ] Q. H. Spen cer , A. L. Swin dl eh ur st, an d M. Ha ar dt , “Zer o- Fo r cing met h o ds f o r dow n link sp atial mult iple xing in mul tiuse r MIMO c hannels ,” IE EE Trans. on Signal Proce ssin g , v ol 52, pp . 461-471, Feb . 2004. [7] M . Sc h ub ert a nd H . Boc h e, “ Iterat ive multiuse r upli nk and dow n l ink b eamfo r ming u n de r SINR co n straints,” IEEE T r ans. o n Signal P r oc essin g, vo l .53, pp. 23 24-2334, Jul 2005. [8] K. K . Wo ng, R . D. Mu r c h, a nd K. B . L eta ief , “A joint- cha nnel diago naliza tio n fo r multiu se r MIM O an tenn a systems, ” IEEE Trans. on W ireless Communi cations , vol 2, pp. 773- 786, July 2003. [9] D. Sama r dzija and N . Manday am , “Multiple a ntenna tra n s mitte r optim izatio n sc h eme s f o r mult iuse r sy ste ms,” IE EE VTC -Fa ll 2003 , pp . 399-403. [ 1 0 ] L . U . C h o i , M . T . I v r l a c , R . D . M u r c h , a n d W . U t s c h i c k , “O n stra tegie s of multi-u ser MI MO t ransm it sig nal pr ocessin g,” IEEE Trans. on W ireless Communic ations , vol 3, pp. 1936-19 41, No v 2004.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment