Lorentz and semi-Riemannian spaces with Alexandrov curvature bounds
A semi-Riemannian manifold is said to satisfy $R\ge K$ (or $R\le K$) if spacelike sectional curvatures are $\ge K$ and timelike ones are $\le K$ (or the reverse). Such spaces are abundant, as warped product constructions show; they include, in partic…
Authors: Stephanie B. Alex, er, Richard L. Bishop
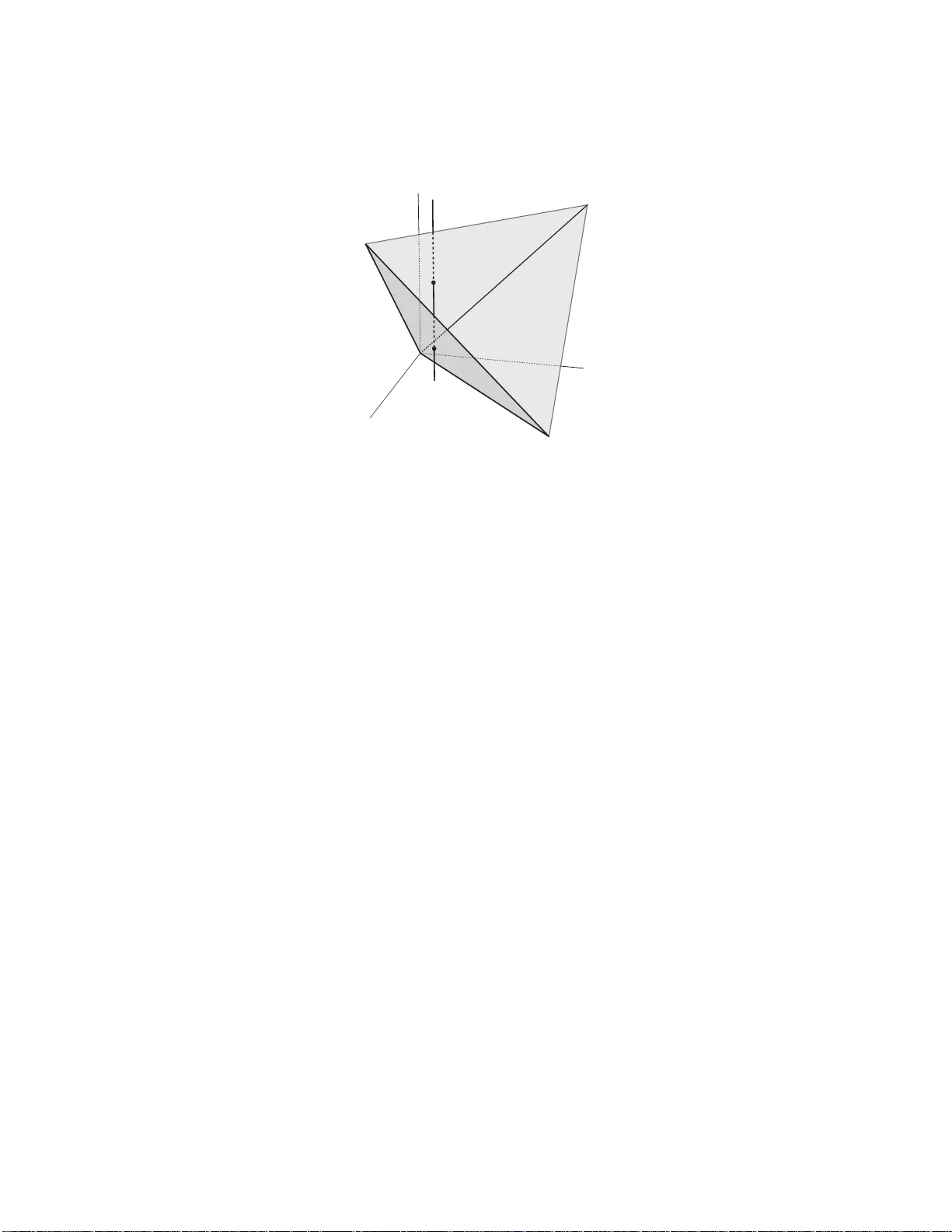
LORENTZ AND SEMI-RIEMANNIAN SP A CES WITH ALEXANDR O V CUR V A TURE BOUNDS STEPHANIE B. ALEXAND ER AND RICHAR D L. BIS HOP Abstra ct. A semi-Riemannian manifold is said to satisfy R ≥ K (o r R ≤ K ) if spacelike sectional curvatures are ≥ K and timelike ones are ≤ K (or the rev erse). Such spaces are abundant, as w arp ed pro duct con- structions show; they include, in p articular, b ig bang Rob ertson-W alk er spaces. By stability , there are many non-warped pro duct examples. W e prov e the equiv alence of this typ e of curv ature b ound with lo cal triangle comparisons on the signed lengths of geo desics. S p ecifically , R ≥ K if and only if locally th e signed length of th e geo desic b etw een t wo p oints on any geod esic triangle is at least that for the corresponding p oints of its mod el triangle in the Riemannian, Loren tz or anti-Riemannian plane of curv ature K ( an d the reverse for R ≤ K ). The pro of is by comparison of solutions of matrix R iccati equ ations for a mod ifi ed shap e op erator that is smo othly defined along reparametrized geodesics (including null geodesics) radiating from a p oint. Also proved are semi-Riemannian analogues to the three basic Alexandrov triangle lemmas, namely , t he realizabilit y , hinge and straigh tening lemmas. These analogues are intu- itivel y surprising, b oth in one of the quantities considered, and also in th e fact that monotonicit y statements p ersist even though the model space ma y change. Finally , the algebraic meaning of these curvature b ounds is elucidated, for examp le by relating them to a curv ature function on null sections. 1. In troduction 1.1. Main theorem. Alexandro v space s are geod esic metric spaces with curv ature b oun ds in the sense of lo cal triangle comparisons. Sp ecifically , let S K denote the simp ly connected 2-dimensional Riemannian space form of constan t curv ature K . F or curv ature b ound ed b elo w (CBB) by K , th e dis- tance b et w een any t w o p oints of a geo desic triangle is r equired to b e ≥ the distance b et w een the corresp onding p oin ts on the “mod el” triangle w ith the same sidelengths in S K . F or curv ature b ounded ab ov e (CBA), sub stitute 1991 Mathematics Subje ct Classific ation. 53B30,53C21, 53B70. The researc h described in this pap er was made p ossible in part by Award No. R MI- 2381-ST-02 of the U.S. Civilian Research & Devel opment F oundation for th e In dep endent States of th e F ormer Soviet Un ion (CRD F). A lso, important parts were developed while the first auth or v isited IH ES in Bures-sur-Y vette, F rance. 1 2 Stephanie B. Alexan der and Richard L. Bishop “ ≤ ”. Examples of Alexandr o v spaces include R iemann ian manifolds with sectional cur v ature ≥ K or ≤ K . A crucial prop ert y of Alexandro v spaces is their preserv ation by Gromo v-Hausdorff conv ergence (assuming uniform injectivit y r adius b oun d s in the CBA case). Moreo v er, CBB sp aces are top o- logica lly stable in the limit [P], a fact at the ro ot of landmark Riemannian finiteness and recognitio n theorems. (See Grov e’s essay [Ge].) CBA sp aces are also imp ortant in geometric group theory (see [Gv, BH]) and harmonic map theory (see, for example, [GvS, J, EF]). In Loren tzian geometry , timelike comparison and r igidit y theory is we ll dev elop ed. Early adv ances in timelik e comparison geometry we re made b y Flahert y [F], Beem and Ehr lich [BE], and Harris [H1, H2]. In particular, a purely timelik e, global triangle comparison theorem wa s pro v ed b y Harris [H1]. A ma jor adv ance in r igidit y theory w as the Lorentz ian splitting theo- rem, to which a n umber of researc hers con tributed; see the surv ey in [BEE], and also the su bsequent wa rp ed pr o duct splitting theorem in [A GH]. The comparison theorems men tioned assume a b ound on sectional curv at ures K ( P ) of timelik e 2-planes P . Note that a b oun d o v er al l n onsingular 2- planes f orces th e sectional curv ature to b e constan t [Ki], and so such b ounds are uninteresti ng. This pro ject b egan with the realization that certain Lorentzi an warp ed pro du cts, whic h ma y b e called Mink o wski, de Sitter or an ti-de Sitter cones, p ossess a global tr iangle comparison prop erty that is not just timelik e, but is fully analogous to the Alexandr o v one. T he comparisons w e mean are on signed lengths of geod esics, where the timelik e sign is tak en to b e negativ e. In this p ap er, leng th of either geo desics or v ectors is alw a ys signed, and we will not talk ab out the length of non geo desic curv es. The mo del sp ac es are S K , M K or − S K , where M K is the simply connected 2-dimensional Lorent z space form of constan t cur v ature K , and − S K is S K with the sign of the metric switc hed, a space of constan t curv ature − K . The cones mentioned ab ov e turn out to ha v e sectional cur v atur e b ounds of the follo wing typ e. F or an y semi-Riemannian manifold, call a tangen t section sp ac elike if the metric is definite th ere, and timelike if it is nond egenerate and indefinite. W rite R ≥ K if spacelik e sectional curv atures are ≥ K and timelik e ones are ≤ K ; for R ≤ K , r ev erse “timelik e” and “spacelik e”. Equiv ale ntl y , R ≥ K if the curv ature tensor satisfies (1.1) R ( v , w, v , w ) ≥ K ( h v , v ih w, w i − h v , w i 2 ) , and similarly with inequalities r ev ersed. The meaning of this t yp e of curv at ure b ound is clarified b y n oting that if one has merely a b ound ab o v e on timelik e sectional curv atures, or merely a b ound b elo w on spacelik e ones, then the restriction R V of the sectional curv ature function to any nond egenerate 3-plane V has a curv ature b ound Semi-Riemannia n sp aces with cur v a ture bounds 3 b elo w in our sens e: R V ≥ K ( V ) (as follo ws f rom [BP]; see § 6 b elo w). T hen R ≥ K means th at K ( V ) may b e c hosen indep end en tly of V . Spaces satisfying R ≥ K (or R ≤ K ) are abu ndant , as wa rp ed pro duct constructions show. They include, for example, the big b ang cosmologica l mo dels discussed b y Ha wking and Ellis [HE, p. 134-138] (see § 7 b elo w). Since there are man y warp ed p ro duct examples satisfying R ≥ K f or all K in a n ontrivial fi nite in terv al, then b y s tability , there are many non-warp ed pro du ct examples. Searc hing the literature for th is t yp e of curv ature b ound, w e f ound it had b een studied earlier by Andersson and How ard [AH]. Their pap er con tains a Riccati equation analysis and gap r igidit y theorems. F or examp le: A geod esically complete s emi-Riemannian manifold of dimension n ≥ 3 and index k , ha ving either R ≥ 0 or R ≤ 0 and an end with fi nite fun damen tal group on wh ic h R ≡ 0, is R n k [AH]. T heir metho d uses parallel hypersu rfaces, and do es not concern triangle comparisons or the metho d s of Alexandrov geometry . S ubsequently , D ´ ıaz-Ramos, Garc ´ ıa-R ´ ıo, and Herv ella obtained a v olume comparison th eorem for “celestial sph eres” (exp onent ial images of spheres in spacelik e h yp erplanes) in a Loren tz manifold with R ≥ K or R ≤ K [DGH]. Do es this type of curv ature b ound alwa ys imply lo cal triangle compar- isons, or do triangle comparisons only arise in sp ecial cones? In this pap er w e pro v e that cur v ature b ounds R ≥ K or R ≤ K are actually equiv al ent to lo cal triangle comparisons. The existence of mo del triangles is describ ed in the Realiza bilit y Lemma of § 2. It states that any p oin t in R 3 − (0 , 0 , 0) represent s th e sidelengths of a unique triangle in a mo d el space of curv ature 0, and the same holds for K 6 = 0 under app ropriate size b ounds for K . W e say U is a normal neighb orho o d if it is a normal co ordinate neigh- b orho o d (the diffeomeorphic exp onential image of some open domain in the tangen t sp ace) of eac h of its p oin ts. There is a corresp ond ing distinguished geod esic b et w een an y t w o p oin ts of U , and the follo wing theorem refers to these geodesics and the triangles they form. If in addition the triangles sat- isfy size b oun ds for K , we sa y U is normal for K . All geo desics are assumed parametrized by [0 , 1], and b y c orr esp onding p oin ts on t wo geo desics, we mean p oints ha ving the same affine parameter. Theorem 1.1. If a semi-Riema nnian manifold satisfies R ≥ K ( R ≤ K ) , and U is a normal neighb orho o d for K , then the signe d length of the ge o desic b etwe en two p oints on any ge o desic triangle of U i s at le ast (at most) that for the c orr esp onding p oints on the mo del triangle in S K , M K or − S K . Conversely, if triangle c omp arisons hold in some normal neighb orho o d of e ach p oint of a semi-Riemannia n manifold, then R ≥ K ( R ≤ K ) . 4 Stephanie B. Alexan der and Richard L. Bishop In this pap er, w e restrict our atten tion to local triangle comparisons (i.e., to normal neighborho ods ) in smo oth sp aces. In the Riemannian/Alexandro v theory , lo cal triangle comparisons h a v e features of p otentia l interest to semi- Riemannian and Loren tz geometers: they incorp orate sin gu larities, imply global comparison theorems, and are consisten t with a theory of limit s paces. Our longer-term goal is to see what the extension of the theory presente d here can contribute to similar questions in semi-Riemannian a nd Loren tz geometry . 1.2. Approac h. W e b egin by men tioning some in tuitiv e barriers to ap- proac hing T h eorem 1.1 . In resolving them, w e are going to draw on p ap ers b y Karcher [Kr] and Anderss on and Ho w ard [AH], putting them to differen t uses than were originally envisio ned. First, a fund amen tal ob ject in Riemannian theory is the lo cally isomet- rically em b edd ed in terv al, th at is, the unitsp eed geo desic. These are the paths studied in [Kr] and [AH]. Ho w ev er, in the semi-Riemannian case this c hoice constrains consideration to fields of geodesics all h a ving the same causal c haracter. By cont rast, our construction, whic h uses affine parame- ters on [0 , 1], applies uniformly to all the geo desics r adiating from a p oint (or orthogonally fr om a nond egenerate submanifold). Secondly , a common p aradigm in Riemannian an d Alexandro v comparison theory is the constru ction of a cu r v e that is s h orter than some original one, so that the minimizing geod esic b et we en th e endp oints is ev en shorter. In the Lorentz setting, th is argument still works for timelike curves, und er a causalit y assump tion. Ho w ev er, sp acelik e geo desics are un stable critical p oint s of th e length functional, and so this argument is forb idden. Thirdly , while th e comparisons we seek can b e r educed in the Riemannian setting to 1-dimensional Riccati equations (as in [Kr]), the semi-Riemannian case seem to require matrix Riccati equations (as in [AH]). Such increased complexit y is to b e exp ected, since semi-Riemannian cur v ature b ounds b elo w (sa y) h a v e some of the qualities of Riemann ian curv ature b ounds b oth b elo w and ab o v e. Let u s start b y outlining Karc her’s approac h to Riemannian curv ature b ound s. I t in clud ed a n ew pro of of lo cal triangle comparisons, one that inte - grated infinitesimal Rauc h comparisons to get distance comparisons without using the “forbidden argumen t” ment ioned ab o v e. S uc h an approac h, m o- tiv ated by simplicit y r ather than necessit y in the Riemannian case, is what the semi-Riemannian case requires. In th is a ppr oac h, Alexandrov curv ature b ounds are c haracte rized by a differen tial inequalit y . Namely , M h as CBB by K in the triangle comparison sense if and only if for ev ery q ∈ M and un it-sp eed geo desic γ , the d ifferen tial Semi-Riemannia n sp aces with cur v a ture bounds 5 inequalit y (1.2) ( f ◦ γ ) ′′ + K f ◦ γ ≤ 1 is satisfied (in the barrier sense) by the follo wing function f = md K d q : (1.3) md K d q = (1 /K )(1 − cosh √ − K d q ) , K < 0 (1 /K )(1 − cos √ K d q ) , K > 0 d 2 q / 2 , K = 0 . The r eason for this equiv alence is that the inequalities (1.2) redu ce to equations in the mo del spaces S K ; sin ce solutions of the differen tial inequal- ities may b e compared to those of the equations, distances in M ma y b e compared to those in S K . The functions md K d q then provide a con v enien t connection b et w een triangle comparisons and curv ature b ounds, since they lead via th eir Hessians to a Riccati equation along radial geod esics from q . W e wish to view this pr ogram as a sp ecial case of a pro cedure on semi- Riemannian manifolds. F or a geod esic γ p arametrized by [0 , 1], let (1.4) E ( γ ) = h γ ′ (0) , γ ′ (0) i . Th us E ( γ ) = ± | γ | 2 . I n this pap er, we w ork w ith normal n eigh b orho o d s, and set E ( p, q ) = E ( γ pq ) w here γ pq is the geod esic f rom p to q that is distinguished by the normal neighborh o o d. (In a b roader setting, one ma y in stead use th e definition (1.5) E ( p, q ) = E q ( p ) = inf { E ( γ ) : γ is a geo desic joining p and q } , under h yp otheses that ensure the tw o definitions agree locally . In (1.5), E ( p, q ) = ∞ if p and q are not connected by a geod esic.) No w defin e the mo difie d distanc e function h K,q at q b y (1.6) h K,q = ( (1 − cos p K E q ) /K = P ∞ n =1 ( − K ) n − 1 ( E q ) n (2 n )! , K 6 = 0 E q / 2 , K = 0 . Here, the formula remains v alid when the argument of cosine is imaginary , con v erting cos to cosh. In the Riemannian case, h K,q = md K d q . The CBB triangle comparisons we seek will b e charac terized by the differentia l inequal- it y (1.7) ( h K,q ◦ γ ) ′′ + K E ( γ ) h K,q ◦ γ ≤ E ( γ ) , on an y geod esic γ p arametrized by [0 , 1]. The self-adjoin t op erator S = S K,q asso ciated with the Hessian of h K,q ma y b e regarded as a mo difie d shap e op er ato r . It has the follo wing pr op erties: in the mo del spaces, it is a s calar multi ple of the id en tit y on the tangent space to M at eac h p oin t; along a nonnull geod esic from q , its restriction to normal v ectors is a scalar multiple of the second fun damen tal form of the equidistant 6 Stephanie B. Alexan der and Richard L. Bishop h yp ers u rfaces from q ; it is s m o othly defi n ed on the regular set of E q , hence along null geodesics fr om q (as the s econd fu n damen tal forms are not); and finally , it satisfies a matrix Riccati equation along every geo desic fr om q , after reparametrization as an in tegral curve of grad h K,q . W e shall also need semi-Riemannian analogues to the thr ee basic trian- gle lemmas on which Alexandrov geomet ry builds, namely , the Realizabilit y , Hinge and S traigh tening Lemmas. The analogues are in tuitiv ely s u rprising, b oth in one of the qu antitie s co nsidered, and also in the fact that mono- tonicit y s tatemen ts p ersist ev en th ough the mo d el space ma y c hange. T he Straigh tening Lemma is an indicator th at, as in the standard Riemann- ian/Alexandro v case, there is a singular coun terpart to the smo oth theory dev elop ed in th is pap er. 1.3. Outline of pap er. W e b egin in § 2 with the triangle lemmas just men- tioned. In § 3, it is sho wn that the differenti al inequ alities (1.7) b ecome equations in the mo del spaces, and h en ce c haracterize our triangle compar- isons. Comparisons for the mo dified shap e op erators u nder semi-Riemannian curv ature b ounds are pr o v ed in § 4, and Th eorem 1.1 is pro v ed in § 5. In § 6, semi-Riemannian cur v ature b ounds are related to the analysis b y Beem and Park er of th e p oin t wise ranges of sectio nal curv ature [BP], and to the “n ull” cur v atur e b ound s considered by Uhlen b ec k [U] and Harris [H1]. Finally , § 7 considers examples of semi-Riemannian spaces with curv ature b ound s, in cluding Rob ertson-W alk er “b ig bang” sp acetimes. 2. Triangle lemm as in model sp a ces Sa y three n um b ers satisfy the strict triangle ine quality if they are p ositiv e and the largest is less than the sum of the other tw o. Denote the p oin ts of R 3 whose co ordinates satisfy the strict tr iangle inequalit y b y T + , and their negat iv es by T − . A trip le, one of whose entries is the sum of the other t w o, will b e called de gener ate . Denote the p oin ts of R 3 − (0 , 0 , 0) whose co ordinates are nonn egativ e degenerate tr iples by D + , and their negativ es b y D − . In Figure 1, the sh ad ed cone is D + , and the inte rior of its conv ex hull is T + . Sa y a p oin t is r e alize d in a mo del sp ace if its co ordinates are th e sidelengths of a triangle. As usual, set π / √ k = ∞ if k ≤ 0. Lemma 2.1 (Realizabilit y Lemma) . Points of R 3 − (0 , 0 , 0) have unique r e alizations, up to i sometry of the mo del sp ac e, as fol lows: 1. A p oint in T + is r e alize d by a unique triangle in S K , pr ovide d the sum of its c o or dina tes is < 2 π/ √ K . A p oint in T − is r e alize d Semi-Riemannia n sp aces with cur v a ture bounds 7 by a u nique triangle in − S K , pr ovide d the sum of its c o or dinates is > − 2 π / √ K . 2. A p oint in D + is r e alize d by u ni q ue triangles in S K and M K , pr o- vide d the lar g e st c o or dinate is < π / √ K . A p oint in D − is r e alize d by unique triangles in − S K and M K , pr ovide d the smal lest c o or dinate is > − π / √ K . 3. A p oint in the c omp lement of T + ∪ T − ∪ D + ∪ D − ∪ (0 , 0 , 0) is r e alize d by a uniqu e triangle in M 0 = R 2 1 . F or K > 0 , if the lar gest c o or dinate is < π / √ K , the p oint is r e alize d by a unique triangle in M K . F or K < 0 , if the smal lest c o or dinate is > − π / √ − K , the p oint is r e alize d by a unique triangle in M K . Pr o of. P art 1 is standard, as is P art 2 for ± S K . No w consider a p oint n ot in T + ∪ T − ∪ (0 , 0 , 0), and den ote its co ordin ates b y a ≥ b ≥ c . T o realize this p oin t in M 0 = R 2 1 , sup p ose a > 0 and tak e a segment γ of length a on the x 1 -axis. S ince distance “circles” ab out a p oin t p are pairs of lines of slop e ± 1 through p if the radius is 0, and h yp erb olas asymp totic to these lines otherwise, it is easy to see that circles ab out the end p oint s of γ in tersect, either in tw o p oin ts or tangen tially , su b ject only to the condition that a ≥ b + c if c ≥ 0, n amely , the p oint is not in T + . Thus our p oint ma y b e realized in R 2 1 , uniqu ely up to an isometry of R 2 1 . On the other h and, if a ≤ 0 then c < 0, s o b y switc hing the sign of the metric, we hav e just sho wn there is a realizati on in − R 2 1 = R 2 1 . F or K > 0, M K is the sim p ly connected co v er of the qu adric surface < p, p > = 1 /K in Mink o wski 3-space w ith signature (+ + − ). Supp ose 0 < a < π / √ K , and tak e a segmen t γ of length a on the quadric’s equ atorial circle of length 2 π / √ K in the x 1 x 2 -plane. A distance circle ab out an end p oint of γ is a hyp erb ola or pair of lines obtained b y intersectio n with a 2-plane p arallel to or coinciding with the tangen t plane. T w o circles ab out the endp oin ts of γ intersect, either in t w o p oints or tangen tially , if the v ertical line of in tersection of their 2-planes cuts the quadric. This occurs sub ject only to the cond ition that a ≥ b + c if c ≥ 0, namely , the p oin t is not in T + . On th e other hand, if a ≤ 0 then c < 0. T ak e a segmen t γ of length c in the quadr ic, where γ is symm etric ab out the x 1 x 2 -plane. Circles of nonp ositiv e radius ab out th e en dp oints of γ int ersect if the h orizon tal line of in tersection of their 2-planes cuts the quadric, and this o ccur s sub ject only to the condition that c < a + b , namely , the p oint is not in T − . Since M − K = − M K , switc hing the sign of the metric completes the pr o of. Let us say the p oin ts of R 3 − (0 , 0 , 0) for whic h Lemma 2.1 giv es mo del space realizati ons satisfy size b ounds for K (for K = 0, no size b ounds 8 Stephanie B. Alexan der and Richard L. Bishop apply). S uc h a p oin t may b e expressed as ( | pq | , | q r | , | r p | ), where △ pq r is a realizing triangle in a mo del space of curv ature K , the geo desic γ pq is a s ide parametrized b y [0 , 1] w ith γ pq (0) = p , and we write | pq | = | γ pq | . By the nonnorma lize d angle ∠ pq r , we mean the inner pro d uct < γ ′ q p (0) , γ ′ q r (0) > . In our termin ology , ∠ p q r is the include d , and ∠ q pr and ∠ q r p are th e shoul- der , nonnormalized angles for ( | pq | , | q r | , | r p | ). This terminology is wellde- fined since the realizing mo del space and triangle are uniqu ely d etermined except for degenerate triples. The latter ha v e only t wo r ealizat ions, whic h lie in geod esic segment s in d ifferen t mo del spaces b u t are isometric to eac h other. An imp ortan t ingredient of the Alexandrov theory is the Hinge Lemma for angles in S K , a monotonicit y statemen t that f ollo ws directly from th e la w of cosines. Pa rt 1 of th e follo wing lemma is its semi-Riemannian v ersion. A new ingredien t of our argu m en ts is the use of n onnormalized shoulder angles, in wh ic h b oth the “angle” and one sid e v ary sim ultaneously . Not only do w e obtain a monotonicit y statement that for K 6 = 0 is not directly app arent from the la w of cosines (Part 2 of the follo wing lemma), bu t we find that monotonicit y p ersists ev en as the mo del sp ace c hanges. Lemma 2.2 (Hinge Lemma) . Supp ose a p oint of R 3 − (0 , 0 , 0) satisfies size b ounds for K , and the thir d c o or dinate varies with the first two fixe d. D enote the p oint by ( | pq | , | q r | , | r p | ) wher e △ pq r lies in a p ossibly varying mo del sp ac e of curvatur e K . 1. The include d nonnormalize d angle ∠ pq r is a de cr e asing function of | pr | . 2. Each shoulder nonnormalize d angle, ∠ q pr or ∠ q r p , is an incr e as- ing function of | pr | . Pr o of. Supp ose K = 0. Th en the mo del spaces are semi-Euclidean planes, and the sides of a tr iangle may b e r epresen ted b y v ectors A 1 , A 2 and A 1 − A 2 . Set a i = < A i , A i > and c = < A 1 − A 2 , A 1 − A 2 > , so (2.1) c = a 1 + a 2 − 2 < A 1 , A 2 > . Since c is an increasing fu nction of its sidelength, P art 1 in any fixed mo del space is immed iate by taking a 1 and a 2 in (2.1) to b e fixed. F or P art 2 in an y fixed m o del space, it is only necessary to rewrite (2.1) as (2.2) c − a 1 + 2 < A 1 , A 2 > = a 2 , where a 1 and c are fixed. A c hange of mo del space o ccurs when th e v arying p oin t in R 3 − (0 , 0 , 0) mo v es upw ard on a vertic al line L , and passes either into or out of T + b y crossing D + (the same argument will hold for T − and D − ). See Figur e 1. Thus L is the union of thr ee closed segmen ts, in tersecting only at their Semi-Riemannia n sp aces with cur v a ture bounds 9 L D + Figure 1. Mod el space transitions in sidelength space t w o endp oin ts on D + . W e ha v e ju st s een that the included angle function is decreasing on eac h segmen t, since the realizing triangles are in the same mo del space (by c hoice at the endp oin ts and by necessit y elsewhere). Sin ce the v alues at the endp oin ts are the same from left or r igh t, the included angle function is d ecreasing on all of L . S imilarly , eac h sh oulder angle fu nction is increasing. Supp ose K > 0. T he v ertices of a triangle in the quadric m o del space are also the vertice s of a triangle in an am bien t 2-plane, whose sid es are the c hords of the original sides. T h e length of the chord is an increasing function of th e original sid elength. Th us to d eriv e the lemma for K > 0 from (2.1) and (2.2), w e must verify the follo wing: If a triangle in a quadric mo d el space v aries w ith fixed sid elengths adjacen t to one v ertex, and v 1 , v 2 are the tangen t vect ors to th e sides at that v ertex, then < v 1 , v 2 > is an increasing function of < A 1 , A 2 > w here the A i are the c hordal vec tors of the t w o sides. Indeed, all p oints of a distance circle of nonzero radius in the quadric mo del space lie at a fixed nonzero ambien t distance from th e tangen t plane at the cen terp oin t. Thus A i is a linear com bination of v i and a fixed norm al v ector N to th e tangen t plane, where the co efficien ts dep end only on the s idelength ℓ i . The desired correlation follo ws. By switching the sign of the metric, w e obtain the claim for K < 0. Remark 2.3. Th e La w of Cosines in a semi-Riemannian m o del space w ith K = 0 is (2.1). I f K 6 = 0, the La w of Cosines for △ pq r m a y b e written in 10 Stephanie B. Alexan der and Richard L. Bishop unified form as follo ws: cos q K E ( γ pr ) = cos q K E ( γ pq ) cos q K E ( γ q r ) (2.3) − K ∠ pq r sin p K E ( γ pq ) p K E ( γ pq ) sin p K E ( γ q r ) p K E ( γ q r ) . Here w e assu me △ pq r satisfies the size b ounds for K . T hen eac h sidelength is < π / √ K if K > 0, and > − π / √ − K if K < 0. P art 1 of Lemma 2.2 can b e deriv ed from (2.3) as follo ws . Fix E ( γ pq ) and E ( γ q r ), and observe that cos √ K c is decreasing in c if K > 0, regardless of the sign of c and ev en as c passes through 0, and increasing in c if K < 0. The size b ou n ds imply that the factors sin √ K a √ K a b ecome either sin √ K a √ K a for √ K a ∈ [0 , π ), or sinh √ | K a | √ | K a | , dep end in g on the signs of K and a , and hence are nonn egativ e. No w w e are ready to prov e a semi-Riemannian version of Alexandr o v’s Straigh tening Lemma, according to whic h a triangle inh erits comparison prop erties from tw o smaller triangles that sub divide it. It turns out that the comparisons we n eed are on nonnormalized s houlder angles. Moreo v er, the original and “sub dividing” tr iangles ma y lie in v arying mo del spaces, so that geometrically we hav e come a long w a y fr om the original in terpretation in terms of h inged ro ds . Since geodesics are parametrized b y [0 , 1], a p oin t m on a d irected side of a triangle inh erits an affine parameter λ m ∈ [0 , 1]. Lemma 2.4 (Straigh tening Lemma for Shoulder Angles) . Su pp ose △ e p e q e r is a triangle satisfying size b ounds for K in a mo del sp ac e of curvatur e K . L et e m b e a p oint on side e p e r , and set λ = λ e m . L e t △ q 1 p 1 m 1 and △ q 2 m 2 r 2 b e triangles in r esp e ctive mo del sp ac es of cu rvatur e K , wher e | q 1 m 1 | = | q 2 m 2 | = | e q e m | , | q 1 p 1 | = | e q e p | , | q 2 r 2 | = | e q e r | , | p 1 m 1 | = | e p e m | , and | m 2 r 2 | = | e m e r | . As- sume | q i m i | < π / √ K if K > 0 , and | q i m i | > − π / √ − K if K < 0 . If (1 − λ ) ∠ p 1 m 1 q 1 + λ ∠ r 2 m 2 q 2 ≥ 0 , then ∠ e q e p e m ≥ ∠ q 1 p 1 m 1 and ∠ e q e r e m ≥ ∠ q 2 r 2 m 2 . The same statement hold s with al l ine qualities r everse d. Pr o of. By the defi nition of nonnormalized angles, (1 − λ ) ∠ e q e m e p + λ ∠ e r e m e p = 0. Therefore, b y hyp othesis, either ∠ q 1 m 1 p 1 ≥ ∠ e q e m e p or ∠ r 2 m 2 p 2 ≥ ∠ e q e m e p . By Lemma 2.2.2, the in equ alit y | p i m i | ≥ | e p e m | holds f or either i = 1 or i = 2, and hence for b oth. But then by Lemma 2.2.1, the claim follo ws. Semi-Riemannia n sp aces with cur v a ture bounds 11 3. Mo dified dist ance functions on model sp a ces In this section we giv e a unified p ro of that in the mo d el spaces of curv ature K , the restrictions to geo desics γ of the mo difi ed distance functions h K,q defined by (1.6) satisfy the different ial equation (3.1) ( h K,q ◦ γ ) ′′ + K h γ ′ , γ ′ i h K,q ◦ γ = h γ ′ , γ ′ i . W e b egin by constru cting the K -affine fun ctions on the mo d el spaces. F or in trinsic metric s paces the notion of a K -affine function was considered in [AB1] and their structural imp lications w ere p ursued in [AB2]. F or semi- Riemannian manifolds the definition should b e f ormulated to accoun t for the causal c haracter of geo desics, as follo ws. Definition 3.1 . A K -affine f u nction on a semi-Riemannian manifold is a real-v alued function f such that for ev ery geodesic γ the restriction s atisfies (3.2) ( f ◦ γ ) ′′ + K h γ ′ , γ ′ i f = 0 . W e say f is K -c onc ave if “ ≤ 0” holds in (3.2), and K -c onvex if “ ≥ 0” h olds. (Elsewhere we ha v e called the latter classes F ( K ) -c onc ave/c onvex .) As in the Riemannian case, th e n -dimensional mo del spaces of cur v ature K carry an n + 1-dimensional vecto r space of K -affine functions, n amely , the space of r estrictions of linear functionals in the am bient semi-Euclidean space of a quadric sur face mo del. Sp ecifically , let R n +1 k b e the semi-Euclidean space of index k . F or K 6 = 0, set Q K = { p ∈ R n +1 k : h p, p i = 1 K } , with the indu ced semi-Riemannian metric, so that Q K is an n -dimensional space of constant cur v ature K . (The 2-dimensional mod el sp aces M K are th e un iversal co v ers of suc h quadric surfaces.) F or q ∈ Q K , let ℓ K,q : Q K → R b e th e restriction to Q K of th e linear fu nctional on R n +1 k dual to the element q , namely , ℓ K,q ( p ) = h q , p i . Define E q on Q K b y (1.5). Prop osition 3.2. F or K 6 = 0 , the function ℓ K,q on Q K is K -affine. F or any p that is joine d to q by a ge o desic in Q K , ℓ K,q ( p ) = 1 K cos q K E q ( p ) , wher e the ar gument of c osine may b e imaginary. Pr o of. W e u se the customary identifica tion of elements of R n +1 k with tangen t v ectors to R n +1 k and Q K . Then the gradien t of the linear fun ctional h q , ·i on R n +1 k is q , viewed a s a parallel v ector field. F or p ∈ Q K , pr o jection π p : T p R n +1 k → T p Q K is giv en b y π p ( v ) = v − K h v , p i p . In particular, π p p = 0. I t is easily c hec k ed that grad p ℓ K,q = π p q . 12 Stephanie B. Alexan der and Richard L. Bishop The conn ection ∇ of Q K is related to the connection D of R n +1 k b y pro- jection, that is, ∇ v X = π p D v X for v ∈ T p Q K . W riting p = γ ( t ), v = γ ′ ( t ) for a geo desic γ of Q K , then ( ℓ K,q ◦ γ ) ′′ ( t ) = h∇ v grad ℓ K,q , v i = h π p D v π p q , v i = h π p D v ( q − K h q , p i p ) , v i = h π p (0 − K h q , v i p − K h q , p i∇ v p ) , v i = − K h v , v i ℓ K,q ( γ ( t )) . (3.3) Th us ℓ K,q is K -affine. Since q is orthogonal to the tangent plane T q Q K , the deriv ative s of ℓ K,q at q are all 0. Along a geo desic γ in Q K that starts at q , the initial conditions for ℓ K,q ◦ γ are ℓ K,q ( q ) = 1 /K , ( ℓ K,q ◦ γ ) ′ ( v ) = 0, so the f orm ula f or ℓ K,q ◦ γ ( t ) is cos( p K h v , v i t ) /K . F or the case K = 0 w e consider the quadric sur f ace mo d el to b e a hyp er- plane not through the origin, so that the affine functions on it are trivially the restrictions of linear f unctionals. On a mod el space Q K of curv ature K 6 = 0, th e mo dified d istance fu n ction h K,q defined by (1.6) ma y b e written on its d omain as (3.4) h K,q = − ℓ K,q + 1 /K, and satisfies the s ame differen tial equation along geo desics as ℓ K,q except for an add itional constan t term, that is, h K,q satisfies (3.1). It is trivial to chec k that this equ ation holds wh en K = 0 and h K,q = E q / 2. 4. Rica tti comp ar isons for modified shap e op era tor s In a give n semi-Riemannian manifold M , set h = h K,q (as in (1.6)) for some fixed c hoice of K and q . Define the mo difie d shap e op er ator S = S K,q , on the region where h is smo oth, to b e the self-adjoin t op erator asso cia ted with the Hessian of h , namely , (4.1) S v = ∇ v grad h. The form of h w as c hosen so that in a mo del sp ac e Q K , S is alw a ys a scalar m ultiple of th e identit y . Indeed, at any p oin t in Q K , (4.2) S = ( I , if K = 0 , K ℓ K,q · I , if K 6 = 0 , where the latter equalit y is by Prop osition 3.2 and (3.3). Belo w, our Riccat i equation (4.3) along radial geod esics σ fr om q differs from the s tandard one in [AH] and [Kr], b eing adjusted to f acilita te the p ro of of Th eorem 1.1. T h us it app lies even if σ is null; it concerns an op erator S Semi-Riemannia n sp aces with cur v a ture bounds 13 that is defined on the whole tangent space; when σ is nonnull, the restriction of S to the n ormal space of σ do es n ot agree with the second fun damen tal form of the equidistant hypersu rface b u t rather w ith a rescaling of it; and w e do n ot different iate with resp ect to an affin e parameter along σ , bu t rather use the integ ral curve parameter of grad h . The gradient v ector fi eld G = grad h is tangen t to the rad ial geo desics from q . Note that G is nonzero along n ull geodesics radiating from q ev en though h v anishes along su c h geo desics. Sp ecifically , G may b e expressed in terms of grad E q on a normal co ordinate neighborh o o d via (1.6). Here grad E q = 2 P , where P is th e image under d exp q of the p osition ve ctor field v 7→ v v on T q M (see [O’N, p. 12 8]). If K = 0, then G = P , and an affin e parameter t on a radial geo desic fr om q is giv en in terms of the in tegral curv e parameter u of G b y t = ae u with u = −∞ at 0. If K 6 = 0, then G = (sin p K E q / p K E q ) P , so G agrees with P up to higher order terms, and the dominant term at q in th e inte gral curve expression is an exp onent ial. Let R G b e the self-adjoin t Ric ci op er ator , R G v = R ( G, v ) G . W e are going to establish comparisons on m o dified sh ap e op erato rs, go v erned b y comparisons on R icci op erators. S ince we are in terested in comparisons along t w o giv en geo desics, eac h r adiating from a giv en basep oint , the effect of restricting to normal co ordin ate neigh b orh o o ds in the follo wing prop osition is merely to rule out conjugate p oin ts along b oth geo desics. Prop osition 4.1. In a semi- Riemannian manifold M , on a normal c o or di- nate neighb orho o d of q , the mo difie d shap e op er ator S satisfies the first-or der PDE (4.3) ∇ G S + S 2 − (1 − K h ) S + R G + K dh ⊗ G = 0 . Before v erifying Prop osition 4.1, we sh ift to th e general setting of systems of ordinary differentia l equations in order to su mmarize all we n eed ab out Jacobi and Riccati equations. Lemma 4.2. F or self-adjoint line ar maps R ( t ) on a semi-Euclide an sp ac e, supp ose F ( t ) satisfies (4.4) F ′′ ( t ) + R ( t ) F ( t ) = 0 for t ∈ [0 , b ] , wher e F (0) = 0 , F ′ (0) is invertible, and F ( t ) is invertible for al l t ∈ (0 , b ] . F or a given function g : [0 , b ] → R with g (0) = 0 , g ′ (0) = 1 , and g > 0 on (0 , b ] , define S by (4.5) g ( t ) F ′ ( t ) = S ( t ) F ( t ) for t ∈ (0 , b ] , and (4.6) S (0) = I . 14 Stephanie B. Alexan der and Richard L. Bishop Then S is self- adjoint, smo oth on [0 , b ] , and satisfies (4.7) g S ′ + S 2 − g ′ S + g 2 R = 0 . Pr o of. Self-adjoin tness of S follo ws from (4.4) and self-adjoin tness of R (see [AH, p. 839]). By (4.5) and (4.4), on (0 , b ] we ha v e S ′ F + g − 1 S 2 F = S ′ F + S F ′ = g ′ F ′ + g F ′′ = g ′ F ′ − g R F = g ′ g − 1 S F − g RF . Multiplying the fi rst and last exp ressions by gF − 1 on the right yields (4.7). On [0 , b ] w e hav e g = t g where g (0) = g ′ (0) = 1, and F = tF where F (0) = F ′ (0) is inv ertible. Then (4.5) gives tg F ′ = S tF on (0 , b ]. By (4.6), S = g F ′ F − 1 on [0 , b ], so S is smo oth there. Comparisons of solutions of (4.7) w ill b e in terms of the notion of p ositiv e definite and p ositiv e semi-defi n ite self-adjoin t operators [AH, p. 838]. A linear op erato r A on a semi-Euclidean space is p ositive definite if h Av , v i > 0 for ev ery v 6 = 0, p ositive semi-definite if h Av , v i ≥ 0. W e then wr ite A < B if B − A is p ositiv e d efinite, and similarly for A ≤ B . Note that the iden tit y map I is n ot p ositi ve d efinite if the index is p ositiv e; ho w ev er, the eigen v alues of a p ositiv e d efinite op erator A are real. If A ≥ 0 and h Av , v i = 0, then Av = 0. In [AH, p. 846 -847], a comparison theo rem for th e shap e op erato rs of tub es in semi-Riemannian manifolds is s tated without pro of. F or the p ro of of Theorem 1.1 we require a s tronger v ersion of the sp ecial case in which the central submanifolds are just p oint s, so the shap e op erators of distance- spheres are compared; th e strengthening comes fr om the extension to mo d- ified shap e op erators. Since it is a k ey result for us, w e no w sho w ho w this v ersion can b e der ived from a mo dification of th e comparison theorem pro v ed in [AH, p. 838-841 ], together w ith a T a ylor s eries argumen t to co v er the b ehavio r at the b ase-p oin t singularity . Theorem 4.3. L et g and R i , F i , S i ( i = 1 , 2 ) b e as in L emma 4.2, and assume g ′′ (0) = 0 . If R 1 ( t ) ≤ R 2 ( t ) for al l t ∈ [0 , b ] , then S 1 ( t ) ≥ S 2 ( t ) on [0 , b ] . If S 1 ( b ) = S 2 ( b ) , then R 1 ( t ) = R 2 ( t ) on [0 , b ] . Pr o of. First w e sho w that (4.7) and the initial data for g im p ly (4.8) S ′ (0) = 0 and (4.9) S ′′ (0) = 1 3 ( g ′′′ (0) I − 2 R (0)) . T o see this, d ifferen tiate (4.7), obtaining g ′ S ′ + g S ′′ + S ′ S + S S ′ − g ′′ S − g ′ S ′ + ( g 2 R ) ′ = 0 . Semi-Riemannia n sp aces with cur v a ture bounds 15 Applying the initial data f or g and S (0) = I giv es (4.8). No w cancel th e ± g ′ S ′ terms and d ifferen tiate again: g ′ S ′′ + g S ′′′ + 2 S ′ 2 + S S ′′ + S ′′ S − g ′′′ S − g ′′ S ′ + ( g 2 R ) ′′ = 0 . Setting t = 0 giv es (4.9 ). No w for δ > 0, let R δ = R 2 + δ B , wh er e B is a p ositiv e defi nite self-adjoin t op erator, constan t as a fun ction of t . Th e solutions F δ of F ′′ + R δ F = 0 with F δ (0) = 0 and F ′ δ (0) = F ′ 2 (0) = F 2 (0) dep end con tin uously on the parameter δ , appr oac hing the solution F 2 of F ′′ ( t ) + R 2 F = 0. In particular, F δ ( t ) is in v ertible for all t ∈ [0 , b ] if δ is sufficien tly small. Defin e S δ ( t ) as in (4.4), (4.5) with R = R δ . Since R δ (0) > R 2 (0) ≥ R 1 (0), setting S = S δ and S = S 1 in (4.9) imp lies S ′′ 1 (0) > S ′′ δ (0). Since S 1 (0) = I = S δ (0), and S ′ 1 (0) = 0 = S ′ δ (0) by (4.8), then S 1 ( t ) > S δ ( t ) for all t ∈ (0 , a ), where a > 0 dep ends on δ . But then S 1 ( t ) > S δ ( t ) for t ∈ (0 , b ]. Our argumen t for this follo ws [AH, p. 839 ], except for sh o wing that the additional linear term in (4.7) is harmless. Na mely , assume the statemen t is false. Then there exists t 0 ∈ ( a, b ] for wh ic h S 1 ( t 0 ) ≥ S δ ( t 0 ), S 1 ( t 0 ) − S δ ( t 0 ) is not p ositiv e def- inite, and S 1 ( t ) > S δ ( t ) for t < t 0 . Hence there is a nonzero v ect or x 0 suc h that h ( S 1 ( t 0 ) − S δ ( t 0 )) x 0 , x 0 i = 0, and so S 1 ( t 0 ) x 0 = S δ ( t 0 ) x 0 . F or f ( t ) = h ( S 1 ( t ) − S δ ( t )) x 0 , x 0 i , then by (4.7), g ( t 0 ) f ′ ( t 0 ) = h ( g ( t 0 ) S ′ 1 ( t 0 ) − g ( t 0 ) S ′ δ ( t 0 )) x 0 , x 0 i = h S δ ( t 0 ) x 0 , S δ ( t 0 ) x 0 i − h S 1 ( t 0 ) x 0 , S 1 ( t 0 ) x 0 i + h g ′ ( t 0 )( S 1 ( t 0 ) − S δ ( t 0 )) x 0 , x 0 i + g ( t 0 ) 2 h ( R δ ( t 0 ) − R 1 ( t 0 )) x 0 , x 0 i = g ( t 0 ) 2 h ( R δ ( t 0 ) − R 1 ( t 0 )) x 0 , x 0 i > 0 . This con tradicts g ( t 0 ) f ′ ( t 0 ) ≤ 0, which is tru e b ecause f ( t ) > 0 on ( a, t 0 ) and f ( t 0 ) = 0. Since S 1 ( t ) > S δ ( t ) for all t ∈ (0 , b ], and S δ ( t ) → S 2 ( t ) for all t ∈ [0 , b ], we ha v e S 1 ( t ) ≥ S 2 ( t ) , t ∈ [0 , b ]. Returning to the geometric setting, let u s ve rify Prop osition 4.1. Pr o of of Pr op osition 4.1. L et N b e the unit radial v ector field tangen t to nonnull geo desics from q . By con tinuit y , it suffi ces to v erify (4.3) at ev ery p oint that is joined to q b y a n onn ull geo desic σ . First we chec k that (4.3) holds when applied to σ ′ = N . Note that the mo dified shap e op erator S satisfies (4.10) S N = ∇ N G = (1 − K h ) N . Indeed, th e form of ∇ N G along a unitsp eed radial geo desic from the base- p oint is the same in all m anifolds, hence th e same in M as in a mo del sp ace. 16 Stephanie B. Alexan der and Richard L. Bishop But in a mo del space, (4.2) and (3.4) imply ∇ N G = S N = K ℓ K,q N = (1 − K h ) N . Th erefore ( ∇ G S + S 2 − (1 − K h ) S + R G + K dh ⊗ G ) N = − K ( Gh ) N + (1 − K h ) 2 N − (1 − K h ) 2 N + 0 + K ( N h ) G = − K g ( N h ) N + K ( N h ) g N = 0 , as required. No w w e verify that (4.3) holds on V = V σ ( t ) = σ ′ ( t ) ⊥ . If M has d imen- sion n and index k , consider an isometry ϕ : T q M → R n k . F or a n onn ull, unitsp eed geo desic σ in M radiating from q , iden tify T σ ( t ) M w ith R n k b y par- allel translation to the base p oin t comp osed with ϕ . Thus we identi fy linear op erators on T σ ( t ) M and R n k , and likewise on V σ ( t ) and the corresp on d ing ( n − 1)- dimensional sub space of R n k . If we restrict to V = V σ ( t ) , an d set R = R σ ′ and g = 1, then (4.4) b ecomes the Jacobi equation for normal Ja- cobi fields, and the op erator defin ed by (4.5) is S ( t ) = W ( t ), the W eingarten op erator, for t > 0: W v = ∇ v N , v ∈ V . (See [AH], whic h uses the opp osite sign con v en tio n for W .) If instead w e set R = R σ ′ as b efore but g = | < G, G > | 1 2 where G = grad h , so that G = g N and v g = 0 for v ∈ V , then the op erator S ( t ) d efi ned by (4.5) and (4.6) is the restriction to V of the mo dified s hap e op erator, for t ≥ 0. Ind eed, (4.5) implies S ( t ) = g ( t ) W ( t ) for t > 0, hence S v = g ∇ v N = ∇ v ( g N ) = ∇ v G, whic h agrees with th e d efinition (4.1) of the m o dified shap e op erator. And the mo dified shap e op erato r is the iden tit y at q b y (4.10), since N can b e c hosen to b e an y unit v ector at q . Then it is straight forwa rd from (4.7) that the restriction to V of the mo d ified shap e op erator satisfies (4.3). The pro of of the rigidit y statemen t p r o ceeds just as in [AH, p. 840]. Remark 4.4. T o summarize, [AH, Theorem 3.2] app lies to the W eingarten op erator of the equidistan t hyp ersurfaces from a hyp ersurfac e . In that case, b oth R and W (0) are p ertur b ed in order to obtain a str ict inequ ality on op erators; if ins tead w e considered the mo difi ed W eingarten op erator S = g W , so S (0) = 0, we w ould p er tu rb R and S ′ (0). On the other hand, Theorem 4.3 ab ov e applies to g W , w here W is the W eingarten op erator of the equidistan t hyper s urfaces f rom a p oint . Here w e had S (0) = I and S ′ (0) = 0, and sh o w ed that merely p erturbing R implied a desired p ertur bation of S ′′ (0) and hence of S ( a ) for small a . The theorem stated without pro of in [AH, p.846-84 7] applies to the in termediate case of equidistan t h yp ers u rfaces fr om an y sub manifold L . Ex cept for c hanges in details, our pro of ab o v e works for that case as w ell. Semi-Riemannia n sp aces with cur v a ture bounds 17 No w let us compare mod ified sh ap e op erators via Theorem 4.3. W e say t w o geo desic segmen ts σ and e σ in semi-Riemannian manifolds M and f M c orr esp ond if they are defined o n the same affine parameter in terv al and satisfy h σ ′ , σ ′ i = h e σ ′ , e σ ′ i . Corollary 4.5. F or semi-Riemannian manifolds M and f M of the same dimension and index, supp os e σ and e σ ar e c orr e sp onding nonnul l ge o desic se gments r adiating fr om the b asep oints q ∈ M and e q ∈ f M and having no c onjugate p oints. Identify line ar op er ators on T σ ( t ) M with those on T e σ ( t ) f M by p ar al lel tr anslation to the b asep oints, to gether with an isometry of T q M and T e q f M that identifies σ ′ (0) and e σ ′ (0) . If R σ ′ ≥ e R e σ ′ at c orr esp onding p oints of σ and e σ , then the mo difie d shap e op er ators satisfy S ≤ e S at c or r esp onding p oints of σ and e σ . Pr o of. The mo difi ed shap e op erators sp lit in to direct summan d s, corre- sp ondin g to their action on th e one-dimensional spaces tangen t to th e radial geod esics and on the orthogonal complements V . T he first summand is the same for b oth M and f M . The second summand is as describ ed in Lemma 4.2 w ith R = R σ ′ and g = | < G, G > | 1 2 . (Since our identifica tion of T σ ( t ) M and T e σ ( t ) f M id en tifies G and e G , we denote b oth of these by G .) F urth er m ore, g ′ = 1 − K h by (4.10), so g ′′ (0) = 0 b y (1.6 ). T herefore the corollary follo ws from Theorem 4.3. Corollary 4.6. Supp ose M is a semi- R iemannian manifold satisfying R ≥ K , and f M = Q K has the same dimension and index as M and c onstant curvatur e K . Th en f or any p ∈ M that is joine d to q by a ge o desic that has no c onjugate p oints and such that a c orr esp onding ge o desic se gment in f M has no c onjugate p oints, the mo difie d shap e op er ator S = S K,q satisfies (4.11) S ( p ) ≤ (1 − K h K,q ( p )) · I . The same statement hold s with ine qu alities r everse d. Pr o of. Let σ b e the giv en geo desic f rom q to p = σ ( t ), and e σ be a corre- sp ondin g geo d esic from e q ∈ f M to e p = e σ ( t ). If σ is nonnull, then by Corollary 4.5, (4.2) and (3.4), we ha v e S ( p ) ≤ e S ( e p ) = K ℓ K, e q ( e p ) · e I = (1 − K e h K, e q ( e p )) · e I , where e I d enotes the iden tit y op erator on T e p f M , and T p M , T e p f M are iden - tified by parallel tr anslation to q , e q follo w ed by an isometry identifying σ ′ (0) , e σ ′ (0). Corollary 4.5 app lies here b ecause the righthand side of (1.1) is e R ( v , w, v , w ), and so R σ ′ ≤ e R e σ ′ at corresp onding p oin ts of σ and e σ . Sin ce 18 Stephanie B. Alexan der and Richard L. Bishop e h K, e q ( e p ) = h K,q ( p ), then (4.11) holds at p . Therefore (4.11) holds ev erywhere b y con tinuit y . 5. Proof of Theorem 1.1 No w we are ready to pro v e that in a semi-Riemannian manifold M , tri- angle comparisons hold in any n orm al neighborh o o d U in whic h there is a curv ature b ound K and triangles satisfy size b ou n ds for K . By the Real- izabilit y Lemma, suc h a △ pq r h as a mod el triangle △ e p e q e r , whic h in th is section w e em b ed in Q K , where Q K is tak en of the same dimens ion and index as U . There are sev eral equiv alen t formulatio ns of the triangle comparisons w e seek: Prop osition 5.1. The fol lowing c ond itions on al l triangles in U ar e e quiv- alent: 1. The signe d distanc e b etwe en any two p oints is ≥ ( ≤ ) the si g ne d distanc e b etwe en the c orr esp onding p oints in the mo del triangle. 2. The signe d distanc e f r om any vertex to any p oint on the opp osite side is ≥ ( ≤ ) the signe d distanc e b etwe en the c orr esp onding p oints in the mo del triangle. 3. The nonnorma lize d angles ar e ≤ ( ≥ ) the c orr esp onding nonnor- malize d angles of the mo del triangle. Pr o of. 1 ob viously implies 2. Con v ersely , for △ pq r in U , supp ose m is on side γ pr and n is on side γ pq , and λ m and λ n are the corresp onding affine parameters. Let △ e p e q e r b e the mo del triangle for △ pq r , △ e p ′ e m ′ e q ′ b e the mo del triangle for △ pmq , and △ p m n b e the mod el triangle for △ pmn . Let e m on γ e p e r and e n on γ e p e q ha v e affine p arameters λ m and λ n , and similarly for e n ′ on γ e p ′ e q ′ . By 2, | m n | = | mn | ≥ | e m ′ e n ′ | . Ther efore b y Lemma 2.2.1 (Hinge), (5.1) ∠ m p n ≤ ∠ e m ′ e p ′ e n ′ . Again b y 2, | e m ′ e q ′ | = | mq | ≥ | e m e q | . By Hinge applied to △ pmq , together with (5.1), we ha v e (5.2) ∠ m p n ≤ ∠ e m ′ e p ′ e n ′ ≤ ∠ e m e p e n. Again by Hinge, | mn | = | m n | ≥ | e m e n | , and so 2 implies 1. The implication 2 ⇒ 3 is a direct consequence of the fir st v ariation formula (see [O’N, p . 289]): (5.3) ( E q ◦ γ pr ) ′ (0) = 2 ∠ q pr . (Note that ou r d efinition of E and O’Neill’s differ by a factor of 2.) Con v ersely , us in g the same triangle n otation as ab ov e, 3 give s ∠ pm q ≤ ∠ e p ′ e m ′ e q ′ , and similarly ∠ q mr ≤ ∠ e q ′ e m ′ e r ′ . Since (1 − λ m ) ∠ pmq + λ ∠ q mr = Semi-Riemannia n sp aces with cur v a ture bounds 19 0, w e ha v e (1 − λ m ) ∠ e p ′ e m ′ e q ′ + λ m ∠ e q ′ e m ′ e r ′ ≥ 0. By L emm a 2.4 (Straigh ten- ing), ∠ e q ′ e p ′ e m ′ ≤ ∠ e q e p e m . Therefore by Hinge, | q m | = | e q ′ e m ′ | ≥ | e q e m | , and so 3 implies 2. T ur ning to the pro of of T heorem 1.1, consider △ pq r in U , and its mo del triangle e p e q e r , whic h w e regard as lyin g in f M = Q K . T aking q and e q as base p oint s giv es mo dified distance functions h K,q and e h K, e q . F or an y m ∈ U , the signed d istance | q m | is a monotone in creasing fun ction of h q ( m ), and distances from e q in Q K ha v e exactly the same relation with e h K, e q . T h us the follo wing pr op osition shows that curv ature b oun d s imp ly triangle compar- isons in the sens e of Prop osition 5.1.2, thereb y provi ng the “only if ” part of Theorem 1.1. Prop osition 5.2. Set h = h K,q ◦ γ pr and e h = e h K, e q ◦ e γ e p e r . If R ≥ K i n U , then h ≥ e h . If R ≤ K i n U , then h ≤ e h . Pr o of. Assume R ≥ K . Aside f rom r ev ersing inequalities the p ro of for R ≤ K is just the same. Set γ = γ pr and e γ = e γ e p e r . F or m = γ ( s ), b y Corollary 4.6, the mo d ified shap e op erator S = S K,q satisfies S ( m ) ≤ (1 − K h K,q ( m )) · I . Since, by definition, h S v , v i is the second deriv ativ e of h K,q along the geod esic with velocit y v , then ( h K,q ◦ γ ) ′′ ( s ) ≤ (1 − K h K,q ( m )) h γ ′ ( s ) , γ ′ ( s ) i . That is, along γ , h K,q satisfies the different ial inequ ality h ′′ + K E ( γ ) h ≤ E ( γ ) . On the other hand, the ab o v e inequalities b ecome equ ations in Q K , so e h ′′ + K E ( e γ ) e h = E ( e γ ) . But E ( e γ ) = E ( γ ) since e γ is a m o del segmen t for γ . Hence the d ifference f = h − e h is K E ( γ )-conca v e: f ′′ + K E ( γ ) f ≤ 0 . Moreo v er, at 0 and 1 the v alues of h and e h are the same sin ce E q ( p ) = E e q ( e p ) and E q ( r ) = E e q ( e r ), so the en d v alues of f are jus t f (0) = f (1) = 0. By conca vit y f is b ounded b elo w by the K E ( γ )-affine function with those end v alues, whic h is just 0. T hat is, f ≥ 0, or h ≥ e h . Next we v erify the “if ” part of Theorem 1.1: 20 Stephanie B. Alexan der and Richard L. Bishop Prop osition 5.3. If signe d distanc es b etwe en p airs of p oints on any triangle in U ar e at le ast (at most) those b etwe en the c orr esp ond ing p oints of the c omp ariso n triangle, then R ≥ K ( R ≤ K ). Pr o of. Let σ b e a nonnull geo desic segment in U , let v ∈ T σ (0) M b e nonn ull and p erp endicular to σ ′ (0), and let J b e th e Jacobi field along σ suc h that J (0) = 0 , J ′ (0) = v . In the 2-dimens ional m o del space f M of cur v ature K and of th e same signature as the section spann ed by σ ′ (0) an d v , c ho ose a geo d esic e σ and vect or e v at e σ (0) p erp en dicular to σ ′ (0) suc h that h e σ ′ (0) , e σ ′ (0) i = h σ ′ (0) , σ ′ (0) i and h e v , e v i = h v , v i . Let e J b e the Jacobi field on e σ such that e J (0) = 0 , e J ′ (0) = v . W rite τ ( t, s ) = σ s ( t ) = exp σ (0) t ( σ ′ (0) + sv ) , and similarly for e τ . Sin ce ∂ τ ∂ t (0 , s ) = σ ′ (0) + s v , then h ∂ τ ∂ t (0 , 0) , ∂ τ ∂ t (0 , s ) i is equal to the corresp ond in g expression in f M . But then our triangle compar- ison assump tion, in the form giv en in P r op osition 5.1.3, and Lemma 2.2.1 (Hinge) com bine to giv e | σ 0 ( t ) σ s ( t ) | ≤ | e σ 0 ( t ) e σ s ( t ) | . S ince | J ( t ) | = lim s → 0 | σ 0 ( t ) σ s ( t ) | /s, and similarly in f M , w e conclud e h J ( t ) , J ( t ) i ≤ h e J ( t ) , e J ( t ) i . No w we calculate the thir d order T a ylor expansion of J . J ′′ = − R σ ′ J γ ′ , J ′′ (0) = 0 , J ′′′ = − R ′ γ ′ J γ ′ − R γ ′ J ′ γ ′ , J ′′′ (0) = − R γ ′ (0) v γ ′ (0) , and hence J ( t ) = P t ( v t − 1 6 R γ ′ (0) v γ ′ (0) t 3 + O ( t 4 )) , where P t is parallel translation f rom γ (0) to γ ( t ) and the p rimes indicate ∇ γ ′ ( t ) . Then we get an expansion h J ( t ) , J ( t ) i = h v , v i t 2 − 1 3 h R γ ′ (0) v γ ′ (0) , v i t 4 + O ( t 5 ) , and a similar expans ion for h e J ( t ) , e J ( t ) i . Since the t 2 -terms are the s ame, we m ust hav e the inequalit y for the t 4 -terms: h R γ ′ (0) v γ ′ (0) , v i ≥ h e R e γ ′ (0) e v e γ ′ (0) , v i = K h γ ′ (0) , γ ′ (0) ih v, v i . Since γ ′ (0) and v sp an an arbitrary nonnull secti on, R ≥ K f ollo ws. Semi-Riemannia n sp aces with cur v a ture bounds 21 6. Al gebraic meaning of c ur v a ture bo unds Curv ature b oun d s of the t yp e stud ied in this pap er are clarified by the analysis b y Beem and Park er of the p oint wise r anges of sectional cur v ature [BP], as w e now explain. W e go fur ther, to relate our curv ature b ounds to the “n ull” cur v atur e b ound s considered by Uhlen b ec k [U] and Harris [H1]. Since in a semi-Riemannian manifold with ind efinite metric, a spacelik e section alwa ys lies in a Lorentz or an ti-Loren tz 3-plane V , the range of sectional curv ature ma y b e stud ied by restricting to suc h 3-planes V . On V , unless the cu r v atur e is constant, b oth the time-lik e and space-lik e sections ha v e infinite in terv als as their range, and either b oth are the en tire real line or b oth are rays whic h o v erlap in at most a common end (see Th eorem 6.1). Then as w e v ary V in the tangen t bundle, either the separation b et w een the t wo ra ys can b e lost or we can ha v e num b ers that separate all p airs of in terv als, namely , a cur v ature b oun d in our s ense. In this section, V alwa ys denotes a Lorentz or anti -Loren tz 3-plane. F ol- lo wing [BP], consider a curv ature tensor R on V . Express R as a h omo- geneous quadratic f orm v ∧ w 7→ Q 1 ( v ∧ w ) = R ( v , w, v , w ) on V 2 V . If ( e 1 , e 2 , e 3 ) is a frame for whic h e 2 and e 3 ha v e the same signature, then ( e 1 ∧ e 2 , e 1 ∧ e 3 , e 2 ∧ e 3 ) is a frame for V 2 V with signature ( − , − , +) with resp ect to the n atural extension of the inner pr o duct. Ev ery nonzero elemen t x 1 e 1 ∧ e 2 + x 2 e 1 ∧ e 3 + x 3 e 2 ∧ e 3 of V 2 V is decomp osable, and so r epresen ts a ori- en ted section of V , so the p r o jectiv e plane P 2 of all n onorien table s ections of V has homogeneous co ordinates x 1 , x 2 , x 3 . The in ner pro du ct quadratic form on V 2 V has the co ordinate expression Q 2 = h v , v i = ( x 3 ) 2 − ( x 1 ) 2 − ( x 2 ) 2 , and the sectional curv ature fun ction is K = Q 1 / Q 2 . W e also identify Q 1 and Q 2 with the quadratic fu nctions on P 2 − { ℓ ∞ } giv en in term s of the corre- sp ondin g nonh omogeneous co ord inates x = x 1 /x 3 , y = x 2 /x 3 b y Q 1 / ( x 3 ) 2 and Q 2 / ( x 3 ) 2 = 1 − x 2 − y 2 . F or v arious curv ature tensors there is no r estric- tion on Q 1 ; that is, for a giv en p oint p in an y n -dimensional manifold M , and a giv en 3-dimensional su bspace V of T p M , a semi-Riemannian metric with ind efinite restriction to V can b e sp ecified in a neigh b orh o od of p in terms of normal co ordinates so as to r ealize an y curv at ure tens or on V . The nu l l c onic N is giv en by Q 2 = 0, and rep resen ts those sections of V on whic h the inner pro duct is degenerate an d K = Q 1 / Q 2 is undefin ed. The homaloidal (flat) c onic H is give n b y Q 1 = 0. The inclusion N ⊂ H is equiv alent to K b eing constant on the sections of V , which is to sa y , Q 1 b eing Q 2 m ultiplied by th at constan t v alue (whic h ma y b e 0 so the inclusion could b e prop er). Otherwise, H and N in tersect in at most 4 p oints, count ing m ultiplicities. The p oints of o dd m ultiplicit y are p recisely the p oin ts where H and N cross. 22 Stephanie B. Alexan der and Richard L. Bishop Since the interior and exterior of N are connected sets on wh ic h K is con tin uous, the ranges of K on time-lik e sections and sp ace-lik e sections of V are in terv als, I ti and I sp . Th e follo wing theorem characte rizes the p ossible ranges. It imp lies, in particular, that if on V either timelike or sp acelik e curv atures are b ound ed, then b oth are, and there exists a cur v ature b ound in our s en se. Theorem 6.1 ([BP]) . F or a curvatur e tensor on a L or entz or anti-L or entz 3 -plane: 1. K is c onsta nt if N ⊂ H . 2. I sp = I ti = R if H and N cr oss. 3. I sp and I ti ar e opp ositely dir e cte d close d half-lines, sep ar ate d by a nontrivial op en interval of curvatur e b ounds, if H do es not interse ct N (including the c ases when H is empty or a p oint not in N ). 4. I sp and I ti ar e opp ositely dir e cte d half-lines with a c ommon end- p oint otherwise, namely, when H and N have a p oint of tangency but neve r c r oss. Mor e sp e cific al ly, I sp and I ti ar e b oth op en, b oth close d, or c ompl ementary, ac c or ding as H and N interse ct in a sin- gle p oint of or der 2 , two p oints of or der 2 , or a single p oint of or der 4 . In a semi-Riemannian manifold with in definite metric, R ≥ K h olds if and only if the restriction of the cur v ature tensor to eac h Lorentz or an ti-Loren tz 3-plane V satisfies R ≥ K (and similarly for R ≤ K ). E quiv al ent ly , on eac h V , either K is constan tly K , or I ti is a semi-infinite in terv al in ( − ∞ , K ] and I sp is a semi-infinite interv al in [ K, ∞ ). Th eorem 6.1 leads us to consider a weak er condition, whic h w e d enote b y R V ≥ K ( V ), in which the interv al b et w eeen I ti and I sp v aries with the indefin ite 3-plane V , and ther e ma y b e no K common to all. W rite R null ≥ 0 if R ( v , x, v , x ) ≥ 0 for an y null v ector x and n on-zero v ector v p erp endicular to x . It is sho wn in [H1, P r op osition 2.3] (or see [BEE, Prop osition A.7]) that if R null > 0 ( < 0) at a p oint, then the range of timelik e sectional curv atures at that p oint is unb ounded b elo w (ab o v e). The follo wing p rop osition giv es precise in formation. Prop osition 6.2. A semi-Riema nnian manifold with indefinite metric sat- isfies R null ≥ 0 if and only if R V ≥ K ( V ) , and similarl y with signs r everse d. Pr o of. In a give n Loren tz or anti- Lorent z 3-plane V , the condition R null ≥ 0 is equiv alen t to Q 1 ≥ 0 on the n ull conic N . In tur n this imp lies that N and H d o n ot cross, an d h en ce cases 1, 3 or 4 of Theorem 6.1 h old. In case 1, ob viously there is a lo w er curv atur e b ound. In cases 3 and 4, there are p oints of N at wh ic h Q 1 > 0. Approac hing N from the s pacelik e side giv es R → ∞ , so I sp is unb ou n ded ab o v e and again V has a low er curv ature b oun d. Semi-Riemannia n sp aces with cur v a ture bounds 23 Con v ersely , supp ose there is a lo we r curv ature b ound for V , so case 2 is ruled out. In case 1, Q 1 = 0 on N . In cases 3 or 4, since I sp is b ounded b elo w, there cannot b e p oin ts of N at whic h Q 1 < 0. The condition R null ≤ 0 plu s a “gro wth co ndition” was us ed in [U] to pro v e a Hadamard-C artan th eorem for L oren tz manifolds. It seems interest- ing to inv estigate the relation b et w een R ≤ 0 and these hyp otheses; Uhlen- b ec k commen ts ab out the gro wth condition,“it is to b e hop ed that a similar condition that do es not dep end on co ordinates can b e f ound” [U, p. 75]. The condition R null > 0 (or < 0) isolates case 3 of T h eorem 6.1. No w let us sho w how a strengthening of this condition b ounds b elo w the length of the in terv al of curv ature b ound s in eac h Lorentz or anti- Lorent z 3-plane V . While sectio nal curv ature is undefined for null sections, Harris has used a substitute, relativ e to a choic e of null ve ctor x . Namely , for a n ull sectio n Π con taining x , define the nul l c urvatur e of Π with r esp e ct to x by (6.1) K x (Π) = R ( w, x, w , x ) / h w, w i for an y n on-n ull v ecto r w in Π [H1]. While there is no a priori w a y to normalize the null vec tor x , it is still p ossible to strengthen Prop ositio n 6.2. This is b ecause, in the pr esence of an in terv al of curv ature b oun ds larger than a single p oin t, the alg ebra of the curv ature op erator R : V 2 V → V 2 V selects a distinguished timeli k e unit v ecto r t , or “observ er”, and hence a distinguished circle of null v ectors x . In the follo wing prop osition, we supp ose V is Loren tz (that is, has signa- ture (+ , + , − )). T here are obvious sign c hanges if − V is Loren tz. Prop osition 6.3. Su pp ose ther e is an interval [ K 1 , K 2 ] of c urvatur e b ounds b elow on the L or entz 3 -plane V , wher e K 1 < K 2 . Then R is diago nalizable. L et t b e a unit timelike ve ctor p erp endicular to the sp ac elike eigenbive ctor of R . Then (6.2) K 2 − K 1 = min v K x (Π) , wher e v runs over unit v e ctors p erp endicular to t , and x and Π ar e the nul l ve c tor and nul l se ction x = t + v and Π = x ⊥ r esp e ctively. F or c u rvatur e b ounds ab ove, substitute (6.3) K 1 − K 2 = m ax v K x (Π) for (6.2). Pr o of. W e consider the case of curv ature b ound s b elo w. First observ e that, while self-adjoin t linear op erators in ind efi nite inner pro d uct spaces are not alw a ys diagonalizable, our hyp otheses imply diagonalizabilit y . Indeed, the unit eige nbiv ec tors of R , of whic h one is spacelik e and t w o are timelik e, 24 Stephanie B. Alexan der and Richard L. Bishop are the critical p oint s of the corresp ond ing qu ad r atic form on un it bivecto rs. The v alues of this quadratic form are sectional curv atures, up to sign. There- fore K 2 , the min im um spacelik e sectional cur v ature, and K 1 , the maximum timelik e s ectional curv ature, are eigen v alues, wh ic h are distinct by h yp oth- esis. The corresp ondin g eigen biv ectors span a n ondegenerate 2-dimensional subspace of V 2 V ; a biv ector p erp endicular to b oth is an eigenbiv ect or by self-adjoin tness. Thus our eigen bive ctors d iagonaliz e R . Let t, v 1 , v 2 b e a fr ame of v ecto rs p erp endicular to the eigensections, so that t ∧ v 1 and t ∧ v 2 are the timelik e eigen biv ectors. Then the null v ectors x = t + v hav e the form t + cos θ v 1 + sin θ v 2 , and the n ull curv atures K x (Π) h a v e the form K 2 − K 1 cos 2 θ − K 3 sin 2 θ where K 3 ≤ K 1 . T hus the minim um is K 2 − K 1 . 7. W arpe d product exa mples If B and F are Riemannian manifolds, ( − B ) × f F will d enote the pro d- uct m an if old with the warp ed pr o duct metric h , i = − ds 2 B + f 2 ds 2 F . Th e sectional curv ature K of ( − B ) × f F , in terms of the sectional curv atures K B and K F , m a y b e calculated f or a frame x + v, y + w , f or x, y ∈ T p B and v , w ∈ T p F . Without loss of generalit y , sup p ose h x, y i = h v , w i = 0. Let G b e the gradient of f . Th en K (( x + v ) ∧ ( y + w )) = −K B ( x ∧ y ) < x, x >< y , y > − f − 1 ( p ) < w , w > ∇ 2 f ( x, x )+ < v , v > ∇ 2 f ( y , y ) + f − 2 ( p ) [ K F ( v ∧ w ) − < G ( p ) , G ( p ) > ] < v , v >< w , w > . Therefore: Prop osition 7.1. Consider Riemannian manifolds B and F , and a smo oth function f : B → R > 0 . Then ( − B ) × f F is a se mi- R iemannian manifold satisfying R ≥ K ( R ≤ K ) if and only i f the fol lowing thr e e c onditions hold: 1. f is ( − K ) -c onc ave ( ( − K ) -c onvex). 2. dim B = 1 or B has se ctional curvatur e ≤ − K ( ≥ K ), 3. dim F = 1 , or for al l p oints ( p, p ) and 2 -planes Π p tangent to F , K F (Π p ) ≥ ( ≤ ) K f ( p ) 2 + < G ( p ) , G ( p ) > . T aking B to b e an in terv al I in Pr op osition 7.1, w e easily construct a ric h class of Lorentz examples: Corollary 7.2. If f : I → R is ( − K ) -c onc ave and F is a R iemannian manifold of se ctional curvatur e ≥ C , then ( − I ) × f F satisfies R ≥ K for any K in the interval (7.1) sup f ′′ f , inf C + ( f ′ ) 2 f 2 . Semi-Riemannia n sp aces with cur v a ture bounds 25 If f : I → R is ( − K ) -c onvex and F is a R iemannian manifold of se ctional curvatur e ≤ C , then ( − I ) × f F satisfies R ≤ K for any K in the interval (7.2) sup C + ( f ′ ) 2 f 2 , inf f ′′ f . Example 7.3. F ollo wing [HE], by a R ob ertson-Walker sp ac e we mean a w arp ed pro du ct M = ( − I ) × f F w h ere F is 3-dimensional spherical, h yp er- b olic or Euclidean space, sa y with curv ature C . T hen the sectional curv a- tures of sections conta ining ∂ /∂ t are K − ( t ) = f ′′ ( t ) f ( t ) , and those of s ections Π tangent to the fi b er are K + ( t ) = C + f ′ ( t ) 2 f ( t ) 2 . By Corollary 7.2, M s atisfies R ≥ K if and only if su p K − ≤ in f K + . It is easy to c hec k that a Rob ertson-W alk er space satisfies the str ong ener gy c ondition , Ric ( t, t ) ≥ 0 for all timelik e ve ctors t , if and only if the curv ature restricted to eac h tangent 4-plane has a nonp ositiv e cur v ature b ound b elo w in our s en se (see [O ’N, Exercise 10, p. 362]). By the Einstein equation, taking the cosmologic al co nstant Λ = 0, the stress-energy tensor of any Rob ertson-W alke r space has the form of a p erf ect fluid whose energy density ρ and pressure p are functions of t giv en by (see [O’N, p. 346]): (7.3) 8 π ρ/ 3 = K + , − 4 π (3 p + ρ ) / 3 = K − . As discu ssed in [O’N, p . 348-350], the conditions ρ > 0, − 1 3 < a ≤ p ρ ≤ A for some constan ts a and A , and p ositiv e Hub ble constan t H 0 = f ′ f ( t 0 ) for some t 0 , corresp ond to an initial big bang singularit y . Th en ρ < 3 aρ ≤ 3 p ≤ 3 Aρ , hence 0 < (1 + 3 a ) ρ ≤ 3 p + ρ . Therefore by (7.3), these big b ang Rob ertson-W alk er spaces all satisfy R ≥ 0. Supp ose th e in terv al I in these mo dels is maximal. If C ≤ 0, then I is semi-infinite and in f ρ = 0, hence also inf p = 0, so 0 is the on ly curv at ure b ound for the en tire space. How ever, ev ery p oin t has a neigh b orho o d whic h has an interv al of curv ature b oun ds ha ving 0 as an interior p oint . If C > 0, then f reac hes a maximum follo w ed b y a big crunch, and K + = C +( f ′ ) 2 f 2 tak es a p ositive minimum. Thus when C > 0, the entire space has an in terv al of curv ature b ounds with 0 as an interior p oint. T aking Λ 6 = 0 here do es n ot c hange the existence of curv ature b ounds, but shifts them to the righ t by Λ / 3. In particular, a F rie dmann mo del is the sp ecia l case in whic h Λ = 0 and p = 0. T hen one can solve explicitly f or f , obtaining (see [HE, p. 138]): (7.4) f = E 3 (cosh τ − 1) , t = E 3 (sinh τ − τ ) , if C = − 1; τ 2 , t = τ 3 / 3 , if C = 0; − E 3 (1 − cos τ ) , t = − E 3 ( τ − s in τ ) , if C = 1 . 26 Stephanie B. Alexan der and Richard L. Bishop The first t w o of these solutions satisfy R ≥ 0, and the third satisfies R ≥ K for all K ∈ [ − 9 8 E 2 , 9 4 E 2 ]. Remark 7.4. V acuum s p acetimes (Ric = 0) only h a v e cur v ature b ounds when they are flat. More generally , an y 4-dimensional E instein Lorentz space with a cu r v atur e b ound has constant curv ature, s ince p erp endicular sections alw a ys ha v e the same curv at ure by a theorem of Thorp e [T]. Example 7.5. W e ma y also generate examples with higher in d ex, th at is, higher-dimensional base. The follo wing examples (a) an d (b) of curv ature b ound s for ( − B ) × f F are from [AH]: (a) R ≥ K ( ≤ K ): T ak e a Cartesian pro duct ( − B ) × F (so f = 1), with sectional curv ature ≤ K in B and ≥ K in F (or the r everse). (b) R ≥ 1 ( ≤ 1): T ak e B = H k , f = cosh(distance to a p oin t), and F of sectional curv ature ≥ 1 ( ≤ 1). Note that to ac hiev e R ≥ 1 when B is not 1-dimensional, B must ha v e curv ature ≤ − 1. Such a B carries many ( − 1)- con v ex functions, bu t b y Prop osition 7.1, w e need the w arping fu nction f on B to b e ( − 1)-conca ve. A solution is to tak e B = H k and f to b e ( − 1)-a ffine. Example (b) fi ts this pattern, with the righ thand side of the inequalit y in Prop ositio n 7.1.3 equal to 1. Other constructions in this pattern are: (c) R ≥ 1 ( ≤ 1): T ake B = H k , f = exp(Busemann function), and F of sectional curv ature ≥ 0 ( ≤ 0). (d) R ≥ − 1 ( ≤ − 1): T ak e B = S k , f = cos(distance to a p oin t), and F of sectional curv ature ≥ − 1 ( ≤ − 1). Examples (a) - (d) are all geod esically complete. Rev ersing the sign on an example that satisfies R ≥ K and is negativ e definite on the base, give s one that satisfies R ≤ − K and is negativ e definite on the fib er. A cknowledgments W e thank Y ur i Bu rago for the picture that triggered this p ro ject ([BBI, p. 132]). Referen ces [AB1] S. B. Alexander, R . L. Bishop, F K -c onvex functions on metric sp ac es , Man uscripta Math. 110 (2003), 115-133 . [AB2] , A c one splitting the or em for Alexandr ov sp ac es , Paci fic Jour. Math. 218 (2005), 1-16. [AH] L. Andersson, R. How ard, Comp arison and ri gi dity the or ems in semi-R iemannian ge omet ry , Comm. A nal. Geom. 6 (1998), 819-877. [AGH] L. Andersson, G. Gallo wa y , R. H o ward, A str ong maxim um principl e f or w e ak solutions of quasi-line ar el liptic e quations wi th applic ations to L or entzian and Rie- mannian ge ometry , Comm. Pure Appl. Math. 51 (1998), 819-877. Semi-Riemannia n sp aces with cur v a ture bounds 27 [BP] J. Beem, P . P arke r, V alues of pseudoriemannian se ctional curvatur e , Comment. Math. Helveti ci 59 (1984), 319-331. [BE] J. Beem, P . Eh rlich, Cut p oints, c onjugat e p oints and L or entzian c omp arison the o- r ems , Math. Pro c. Camb. Phil So c. 86 (1979), 365-384. [BEE] J. Beem, P . Ehrlich, K. Easley , Glob al L or ent zian Ge ometry , 2nd ed. Dekker, New Y ork, 1996. [BH] M. Bridson, A . Haefliger, Metric Sp ac es of Non-p ositive Curvatur e , S pringer-V erlag, Berlin,1999 . [BBI] D . Burago, Y u. Burago, S. Iv anov, A Course in Metric Ge ometry , Graduate Stud ies in Mathematics, V ol. 33, Amer. Math. So c., Providence, 2001. [BGP] Y u. D. Burago, M. Gromo v, G. Perelma n, A. D. Alexandr ov sp ac es with curvatur e b ounde d b elow , Ru ssian Math. Surveys 47 (1992), 1-58. [DGH] J. D ´ ıaz-Ramos, E. Garc ´ ıa-R ´ ıo, L. Hervella , Comp arison r esults for the volume of ge o desic c elestial spher es in L or entzian manif olds , Diff. Geom. Ap p. 23 (2005), 1-16. [EF] J. Eells, B. F uglede, Harmonic Maps b etwe en R iemannian Polyhe dr a . With a pref- ace by M. Gromo v. Cam bridge T racts in Mathematics, 142. Cam bridge Universit y Press, Cam bridge, 2001. [F] F. Flaherty , L or entzian manifolds of non-p ositive curvatur e , Proc. Symp. Pu re Math. XXVI I , part 2, A mer. Math. So c., Providence ( 1975), 395-399 . [Gv] M. Gromo v, Hyp erb olic manif olds, gr oups and actions . I. Kra, B. Maskit (eds.), Riemann Surfac es and R elate d T opi cs , A nnals of Math. S tudies 97, Princeton Un i- versi ty (1981), 183-213. [GvS] M. Gromov, R. Schoen, Harmonic maps into singular sp ac es and p -adic sup err igid- ity f or lattic es in gr oups of r ank one , Inst. Hautes Etudes Sci. Publ. Math. No. 76 (1992), 165–24 6. [Ge] K. Grov e, R eview of “Metric Structur es for R iemannian and non-R iemannian sp ac es” by M . Gr omov , Bull. A mer. Math. S oc, 38 (2001), 353-363. [H1] S. H arris, A triangle c omp arison the or em for L or entz manifolds , In diana Math. J. 31 (1982), 289-308 . [H2] , On maximal ge o desic diameter and c ausality in L or entzian m ani folds , Math. Ann. 261 (1982), 307-313. [HE] S . Hawking, G. Ellis, The L ar ge Sc ale Struct ur e of Sp ac e-Time , Cam bridge U. P ., Cam bridge,1993. [J] J. Jost, Nonp ositive Curvatur e: Ge ometric and Analytic Asp e ct s , Birkhauser, Basel, Boston, 1997. [Kr] H. Karcher, Riemannian Comp arison C onstruct ions . S. S. Chern, (ed.), Glob al Differ ential Ge ometry , MAA Studies in Math., 27 , Math. Asso c. Amer. 1987. [Ki] R. Kulkarni, The values of se ctional curvatur es in indefinite metrics , Commen t. Math. Helv. 54 (1979), 173-176. [O’N] B. O’Neill, Semi-Riemannian ge ometry with applic ations to r elativity , A cademic Press, New Y ork, 1983. [P] G. Perelma n, Alexandr ov’s sp ac es wi th curvatur e b ounde d f r om b elow II , preprint (1991). [T] J. Thorpe, Curvatur e and the Petr ov c anonic al f orms , J. Math. Phys. 10 (1969), 1-7. [U] K. Uhlenbeck, A Morse the ory for ge o desics on a L or entz manif old , T op ology 14 (1975), 69-90. 28 Stephanie B. Alexan der and Richard L. Bishop 1409 W. Gree n St., Urbana, Illinois 61801 E-mail addr ess : sba@math.uiuc. edu 1409 W. Gree n St., Urbana, Illinois 61801 E-mail addr ess : bishop@math.ui uc.edu
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment