On Compact Routing for the Internet
While there exist compact routing schemes designed for grids, trees, and Internet-like topologies that offer routing tables of sizes that scale logarithmically with the network size, we demonstrate in this paper that in view of recent results in comp…
Authors: - Dmitri Krioukov (CAIDA) – dima@caida.org - kc claffy (CAIDA) – kc@caida.org - Kevin Fall (Intel Research Berkeley) – kfall@intel.com - Arthur Brady (Tufts University) – abrady@cs.tufts.edu
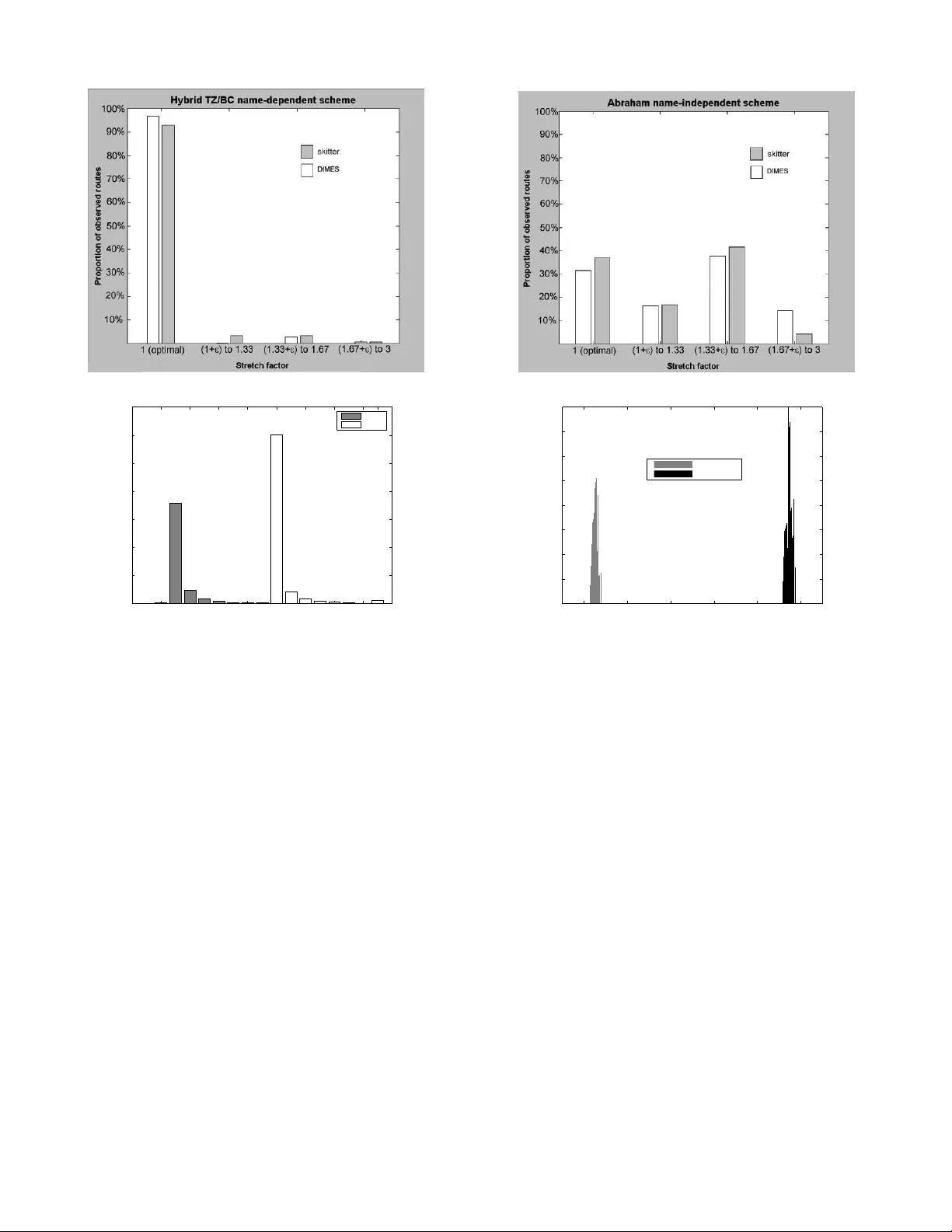
On Compact Routing f or the Internet Dmitri Kriouko v CAID A dima@caida .org kc claffy CAID A kc@caida.org K e vin F all Intel Research Berkele y kf all@intel.com Ar thur Brady T ufts Unive rsity abra dy@cs.tufts.edu ABSTRA CT The Internet’s routing system is facing stresses du e to its p oor fundamental scaling prop erties. Compact routing is a research field that studies fundamental limits of routing scalabilit y and designs algorithms th at t ry to meet these limits. In particula r, compact routing researc h shows that shortest-path routing, forming a core of traditional routing algorithms, cannot guaran tee routing table (R T) sizes that on al l netw ork topologies gro w slo w er than linearl y as func- tions of the netw ork size. How ever, there are plen ty o f com- pact routing schemes th at relax the shortest-path require- ment and allow for improv ed, sub linear R T size scaling that is math ematical ly prov able for all static n etw ork t opologies. In particular, th ere exist compact routing schemes designed for grids, trees, and Internet-lik e top olog ies that offer R T sizes that scale logarithmically with the net w ork size. In this p aper, w e d emonstrate t hat in view of recen t re- sults in compact routing researc h, such logarithmic scaling on Internet-like top ologi es is fundamentally imp ossible in the presence of top ology dy namics or top ology-indep enden t (flat) addressing. W e use analytic argumen ts to show that the num b er of ro uting control mess ages p er topology change cannot scale b etter than linearly on Internet-like topologies. W e also emplo y simulatio ns to confirm that logarithmic R T size scaling gets broken by t op ology-indep endent address- ing, a cornerstone of p opular lo cator-identifier split p ropos- als aiming at improving routing scaling in the presence of netw ork t op ology dy namics or host mobilit y . These p es- simistic find ings lead us to the conclusion th at a fundamen- tal re-examination of assumptions b ehind routing models and abstractions is needed in order to fi nd a routing arc hi- tecture that would b e able t o scale “indefinitely .” Categories and Subject Descriptors C.2.2 [ Net wor k Protocols ]: R outing proto cols ; G.2.2 [ Graph T he ory ]: Graph algorithms, Netw ork prob- lems; C.2.1 [ Netw ork A rchitecture and De s ign ]: Netw ork top olog y General T erms Algorithms, Design, Theory Keyw ords Compact routing, I n ternet rout in g, routing scalabilit y 1. INTR O DUCTION Despite prev ailing concerns among netw ork op erators and developers that the cu rren t Internet interdomain routing system will not scale to meet the needs of the 21st cen- tury global Internet, netw ork in g research has not yet pro- duced a new routing architecture with satisfa ctory flexibility and math ematical ly p ro vable scalabili ty characteristics. W e b eliev e that w e will so on be faced with a critical arc hitec- tural inflection p oin t p osing a significant challenge to scaling the size of the future Internet. The last critical point was reac hed when the Internet’s routing sy stem adopted strong address aggregatio n using CIDR to hand le address scaling in the mid 90’s. While CIDR was an extremely effective tactic, most ex perts agree th at the growth b eha vior of the routing table in th e last decade confirms that the type of address management required by CIDR will not su ffice to meet fut u re Internet routing needs, and that a fun damen- tal t op-to-b ott om reexamination of th e routing architecture ma y be required [1]. In this pap er we set to work on su ch a reexamination. 1 As we proceed, we first identif y , in Section 2, the fundamen- tal causes of Internet routing scalabil ity problems, and how they imply the need for dramatically more efficient routin g algorithms with rigorously proven wors t-case p erfor mance guaran tees. Such algorithms exist—they are known collec- tively as c omp act r outing schemes . They d o not and , gener- ally , can not guarantee routing along shortest paths—th ey str etch them. In S ection 3, w e juxtap ose the formal no- tion of stretch (or hop str etch ) with b etter-kn o wn forms of path inflation present in conv entional netw orking. There is a fundamental trade-off b et w een stretch and routing ta- ble (R T) size, and w e show in Section 4 why hierarchica l routing and addressing fall short in find ing an optimal bal- ance p oint of this trade-off f or topologies o f in terest. W e also outline, in the same section, kn own alternativ e addressing techniques that compact routing sc hemes use. W e analyze the key ideas b ehind these schemes in Section 5. W e focus on u n iv ersal schemes in this section and shift our atten- tion to th e schemes sp ecial ized for Internet-lik e topologies in S ection 6 . All th ese sc hemes are static. They ignore any communication ov erh ead th eir implementations might require. W e use analyt ic arguments in Section 7 to directly prov e that recent results in compact routin g researc h rend er 1 W e clarify up front th at scalabilit y is only one of several problems of the curren t In ternet routing arc hitecture. Oth er problems include securit y , isolation, configuration contro l, etc. See [2] for a long list of fut u re routing arc hitecture requirements. fundamentally u nscalable the communication costs of any routing algorithm applied to I nternet-like top ologi es. De- spite th ese findings, “ locator-identifier split” (LIS) prop osals are b ecoming p opular these d a y s, as they are widely b elieved to scale b etter in the presence of netw ork top ology d ynam- ics and host mobilit y . In Section 8 w e establish that LI S is a form of name-indep endent compact routing, discussed in Section 5 and using topology-un a ware (fl at) addressing. W e show that contrary to common b elief, the scaling p rop- erties of su c h routing can only b e worse compared to the top olog y-aw are, name-dep endent case. W e employ sim ula- tions to demonstrate t h at both the R T sizes and stretch induced by the b est-p erfor ming name-indep endent sc hemes are significantly w orse compared to their name-dep endent counterparts. W e conclude and p ose open problems in Sec- tion 9. 2. INTERNET R OUTING TOD A Y There are tw o main related problems with the I n ternet’s current routing arc hitecture. First, it is not flexible, due pri- marily to the n eed to assign no de addresses based on top o- logical location. In order to achiev e highly efficient address aggregatio n and relatively small routing t ab les, a CIDR net- w ork must have tw o characteris tics: an essen tially tree-like graph structu re, and add ress assignment that follo ws this structure. No d e mobilit y and end site m ulti-homing funda- mental ly break this mo del. But even recommended Internet traffic engineering techniques, e.g., load b ala ncing, require de- aggreg ation of address blo c ks that cause the routing table to gro w even if the netw ork itself is not gro wing. The second problem with the Internet’s routing architec- ture is how the interdomain routing algorithm (path vector, for BGP) and its proto col implementation scale with t he size of the netw ork. Poor scaling of a routing algorithm ex- presses itself in terms of rapid, e.g., linear, rates of grow th of the routing table (R T) size. Poor scaling of R T sizes ex- acerbates conv ergence problems (conv ergence time, ch urn, instabilities, etc.). Not only is the communication ov erhead of BGP kn own t o b e exp onential [3], but the BGP R T size also appears to gro w exp onen tially [4 ]. The immediate causes of Internet R T grow th hav e b een extensively analyzed [1, 5, 6, 7, 8]; they reflect voluntary business relationships occurring at increasing den sit y , traf- fic engineering techniques to impro ve robu stn ess or red uce operational costs, and address allocation p olicies devel op ed by IANA and the regional add ress registries—all resulting in v arious forms of de-aggregation, whic h is t he primary cause of sup er-line ar growth of the BGP R T size. Several studies, prop osal s, and even new routing architectures seek to miti- gate these effects. Prominent efforts in this area includ e [9, 10, 11, 12, 13] and most recently [14, 15, 16]. Ho we ver, these approac hes do n ot rigorously pro vide non-trivial scal- ing guarantees , and many of them rep resent only short-t erm fixes since they address the symptoms rath er than the ro ot of t he problem. More p recisel y , most of th ese approaches try to fi nd shortest paths in the top ology , leading to R T sizes that cannot scale b etter than linearly [17]. W e are interes ted in algorithms that scale b etter than that. Ideally , we wan t to achiev e logarithmic scaling 2 that comes close to satisfy- 2 T o b e more precise, w e mean p olyl o garithmic scaling, b ut w e abuse th e terminology and do n ot differentiate betw een logarithmic and p olylogarithmic grow th in this pap er. ing our desire for “infin ite scalabilit y” in a future routing arc hitecture [2]. As a represen tative example of the efforts men tioned above, w e consider th e idea of routing on autonomous system (AS) num b ers, wherein AS num b ers rep lace IP prefi xes in the role of interdomai n routing addresses. Using the coarser gran ularity of A S num b ers is a natural idea, and is now a common p art of many prop osals [10 , 12, 13, 14, 15]. A t first glance, routing on AS numbers looks lik e a solution to the R T size problem. Indeed, such an approac h could immediately red uce the R T size by an order of magnitud e, since there are on th e order of 10 5 IP prefixes and 10 4 AS num b ers in the global R T to day . H o wev er, one can easily o verlook that it is just a one-time constant-factor redu ct ion, and n ot a change of the scaling b ehavior. As suc h, it is not a solution to the core p roblem, b ut rather a temp orary relief measure. Ind eed, if algorithms routing on A S num b ers are still shortest-p ath routing algorithms, t hen they still cannot prod uce R T sizes that grow slow er th an linearly with the netw ork size measured, in this case, by the total num b er of ASs in the Internet. T o make things even worse, this num b er currently gro ws faster th an the total num b er of IP prefixes [4, 7], and if the trend contin ues after a hypothetical adoption of routing on A S numbers, th en the actual r ate of gr owth of R T sizes can only b e wors e than to d a y . F urth er- more, routing on AS num b ers requires some form of global directory t o map IP addresses or prefixes to the A S numbers they are associated with. So far we hav e argued that inflex ib ilit y of th e current rout- ing architecture precludes long-term scalabilit y . An ideal routing architecture w ould allow for assigning no d e addresses indep endent of topology , and would employ routing algo- rithms that can t ruly scale. No prop osal thus far h as si- multaneousl y solved b oth ob jectiv es; address aggregation remains the only generally accepted method for effectively limiting R T size grow th, yet op erational and business imp er- ative s require intenti onal violation of th is tenet. Something has to give. In order to find sustainable solutions to the global Internet routing problem, w e need to inv estigate routin g scalabilit y at its most fund amental level. F or interdoma in rout ing, th e framing parameters are the p erforma nce guarantee s of rout- ing algorithms op erating on graphs with top ologies similar to the Internet AS-level top ology , and which can supp ort top olog y-indep endent addressing of no des. In p articular, we seek rigorous lo w er and upp er b ounds on the R T size used in supp orting all rout in g features, i.e., mapping no de n ames to their lo cations, and reaching those lo cations. Compact routing research establishes t h ese b ounds and constructs al- gorithms (or sc hemes) that try to meet them. One of the central th emes in compact routing is the inves tigation of the inevitable trade-off betw een R T sizes and routing stretch. 3. R OUTING STRETCH The str etch of a routing algorithm is defined as t h e worst- case path-length increase factor relative to shortest p ath s. More sp ecifically , for every pair of nod es in all graphs in the set of graphs th e algorithm can op erate on, we fi nd the ratio of the length of the route taken by th e algorithm to the length of the shortest av ailable path b et wee n the same pair of n odes. The maximum of th is ratio among all no d e pairs in all the graphs in the set is the algorithm’s stretch. The av erage stretch is the av erage of th is ratio across all source-destination pairs in a given graph or set of graphs. W e emphasize that th is n otion of stretch h as n othing in common with k n o wn forms of “path inflation” in contempo- rary Internet routing. P ath inflation in today’s Internet is not due to the stretch of the underlying routing algorithm, but rather due to in tra- and in ter-domain routing p olicies, and vari ous incongruities across multiple level s (geographi- cal, router, AS , etc.) of netw ork top ology abstraction [18]. W e are not aw are of any widely-used routing proto col that prod uces other th an stretch-1 (sh ortest) paths by default. Link-state ( LS) in OSPF or ISIS, d istance-v ector (DV) in RIP or ( E)IGRP , LS /D V hybrid in L V A [19], and p ath- vector (PV) in BGP , are all forms of trivial shortest-path routing (stretch-1). Consider tw o examples: BGP and OSPF. Non-trivial p olicy configurations generally preven t BGP from routing along the actual shortest path, bu t without p olicie s the BGP route selection pro cess w ould alw a ys select the shortest paths in the AS-level graph. S imila rly , non-t rivial area configurations preven t OSPF from routing along the shortest paths, but routing inside an area is alwa ys along the shortest p ath in the weigh ted router-level graph. The ab ov e examples seem straightforw ard, but w e identif y them t o eliminate any p ossible confusion b et we en stretch of a routing algorithm and inflation of paths p ro duced by a routing pr oto c ol sub jected to p olicy or configuration con- strain ts. Clarifying the difference allo ws u s to formulate b oth n ecessary and sufficient conditions for the stretch of a routing algori thm prop osed for use in the I n ternet. The sufficient routin g stretc h requirement is that the rout- ing algorithm und erlying any realistic interdomain rout ing protocol must b e of stretch-1. T o understand the reasoning b ehind this requ iremen t , consider a stretc h > 1 routing algo- rithm and apply it to a complete graph, which has all no des directly conn ected to all other no des so that all shortest paths are of length 1. Since this algori thm do es not guar- antee finding all shortest paths, R Ts at some no des might lac k entries corresponding to th eir o wn directly- connected neighbors. Put in different terms, in order to shrink R Ts, the algorithm might ha ve to force some no des to d elete in- formation about some of their d irectly- attac h ed interface s. Of course, the Internet interdomain top ology is not a full mesh, and it might turn out th at the same routing algorithm that fails to b e stretch-1 on a full mesh does in fact fi n d all shortest paths to eac h no de’s neighbors in realistic Internet- lik e top ologies. W e thus might also pursue the explicit task of finding a non-u niv ersal routing algorithm th at is applica- ble only to Internet-like top ologies. W e d o not require this algorithm b e stretch-1, but it m ust b e of stretc h-1 on p aths of length 1 leading to no des’ neighbors. In other words, the ne c essary routing stretc h requirement is that th e rout- ing algorithm und erlying any realistic interdomain rout ing protocol must b e of stretch-1 on p aths of length 1 in realistic Internet-lik e top ologies. These requirements are purely practical: if a link exists b et w een a pair of autonomous systems, it must b e made a v ailable for carrying traffic. If our “sophisticated” rout- ing algorithm remov es routing information ab out such links from routing tables, then netw ork op erators will feel com- p elled to manually reinsert it, which counters t he scalabilit y ob jective of reducing th e R T size and req uires manual in- terven t ion whic h w e would in general lik e to av oid. W e will refer to this (un desirable) administrative re-adding of infor- mation ab out shortest paths to no des’ neighbors as manual r einsertion . The absence of an immediate neighbor in a no de’s R T app ears t o con tradict common sense, but one can verify that t h is situation can o ccur with the algorithms we d iscuss in Section 5 . W e h ave not had to d eal with this effect in practice yet b ecause the routing algorithms in op eration to- day are all stretc h-1. Stretch-1 algorithms require complete knowl edge of the netw ork top ology (or at least of distances b et w een no des in it) and main tenance of an individualized optimal next hop for every p ossible destination in th e net- w ork. This means Ω( n ) entrie s are required in the R Ts of every no d e in the wo rst case. I n order to shrink R Ts b elo w this size, we m ust prepare t o lose top ological information, and consequently lose optimal next hops for some destina- tions. Balancing this fundamental and unav oidable trade-off b et w een stretch of a routing algorithm and the sizes of R Ts it prod uces is at the center of comp act routing researc h tod a y , but t he first formaliza tion of this trade-off w as in trod uced in early work on hierarc hical routing and addressing. 4. HIERARCHICAL R OUTING, ADDRESS- ING, AND THEIR AL TERN A TIVES In 1977 Kleinro c k and Kamoun pub lished their pioneer- ing pap er on hierarchical routing [20]. They show ed how hierarc hical clustering could b e used with appropriate no d e addresses to pro duce highly scalable routing tables. This technique is t h e basis of the p opular hier ar chi c al r outing ap- proac hes u sed t o day in practice, e.g., in the form of CIDR in the interdoma in routing case, or usage of OSPF/ISI S areas in t h e in tradomain routing case. The key idea is to group (or aggregate) n earby no des into clusters, clusters into sup er- clusters, and so on, in a b ottom-up fashion. Determining these clusters can b e accomplished through a hier ar chic al clustering algorithm, the p erforma nce of whic h is key to goo d routing p erfo rmance. Hierarc hical aggregation and addressing offer substantia l R T size reduction by abstracting out unnecessary top ologi- cal details ab out remote p ortions of th e netw ork: no des in one ( super-)cluster need to keep only one R T entry for all nod es in another (sup er-)cluster. A lmost all prop osals for future Internet routing architectures trying to address the R T size problem are based, explicitly or implicitly , on this concept of hierarc hical routing. In fact, no other concep t b ehind R T size redu ction has been systematically consid- ered in the n et working literature. Unfortunately , hierarc h i- cal routing is simply n ot a goo d candidate for interdomain routing, despite its current widespread use and reputation as realistically scala ble, and we show why in the rest of this section. In the same pap er [20], Kleinrock and Kamoun w ere the first to analyze the stretch/R T size trade-off. They sho wed that th e rou t ing stretch pro duced by the h ierarc hical ap- proac h is satisfactory only for top olo gies with av erage short- est path hop-length (distance) ¯ d ( n ) that gro ws qu ic k ly with netw ork size n , which means it p erforms well only for graphs where large distances b etw een nod es p rev ail. In fact, they assumed that the av erage distance gro ws p olynomially with the netw ork size, ¯ d ( n ) ∼ n ν with ν > 0. Suc h graphs h ave many remote no des, i.e., no des at long hop distances from eac h other, which allo ws for efficient aggregation of top ology details without substan tial p ath length increase. 4.1 Grids The simplest example of graphs with av erage distance ¯ d ( n ) ∼ n ν are δ -dimensional grids. The exp onent ν is 1 /δ in this case, and no de aggregation works naturally: clusters are composed from n odes located at small Manhattan distances from eac h other, while sup er-clusters contain neighboring clusters, and so on. W e emphasize that aggreg ation is not th e only technique to ac hieve logarithmic R T scaling for grids. W e could al- ternatively embed a δ -dimensional grid into a δ -dimensional Euclidean space, and add ress no des by t h eir co ordinates in the space. With suc h an em b edding, nod es would n ot need to k eep any R T information ex cept for their own add resses , since k no wing th eir own co ordinates and t he coord in ates of the destination allo ws for shortest-p ath rou t ing according to the Euclidean, i.e., Manhattan , distance. The R T size thus scales as th e address size, i.e., logarithmically . Logarithmic scaling extend s from δ - d imensional grids to graphs with doubling dimension δ [21]. The doubling d imen- sion of a graph, or more generally , of a metric space, is the smallest δ such that every ball of radius 2 r can b e co vered by 2 δ balls of radius r . Informa lly , such graphs are “p er- turb ed v ersions” of δ -dimensional grids. A key idea b ehind efficien t addressing in such graphs allo wing for logarithmic R T size gro wth is to introd uce distance scales [22, 23] or maps of no de co ordin ates. The address of a n ode b ecomes a collection of its co ordinates, whic h are th e distances from the no de to carefully constru ct ed subsets of no des that form a “frame of reference.” In other words, knowi ng the dis- tances to these frame-of-reference subsets, we can uniquely identif y a no de’s location in the graph. One can show then that in order to bring stretc h arbitrarily close t o 1, we n eed only a logarithmic num b er of such subsets, which guarantees logarithmic R T sizes. 4.2 T r ees A strikingly simila r situation o ccurs with routing on reg- ular, i.e., b -ary , trees. They also allow for efficien t aggrega- tion: combine leav es of a single p aren t into a single cluster, while sup er-clusters contain clusters with a common parent of the parent, and so on. Y et again we find that aggregation is not the only path to wa rd logarithmic R T scaling on such trees. F or example, w e can use node addressing induced by a depth- first-searc h (DFS) no de num b ering. Given a DFS-b ased addressing con- ven t ion, any no de can infer its ex act location on the tree from its address. In particular, a no de kn o ws what no des are its children or descendants of whic h one of its children, and what n odes are n ot its descendants . As with grids, logarithmic scaling extends from regular b -ary trees to a wider class of similar graphs—to arbitrary trees in this case [24, 25 ]. The main idea b ehind efficient addressing schemes is still to use DFS num b ering, but we can no longer rely only on the no de DFS I D to identify its location on a tree. It turn s out how eve r that it is p ossi ble to enco d e the path from the ro ot of a tree to a no de in such a wa y that t his enco ding p reserv es the logarithmic upp er b ound. If we now make the sequence of nod es ly in g on the path to the root a part of the no de address, then one can chec k that routing along shortest paths b ecomes trivially p ossi ble. 4.3 Grids and tr ees In b oth t rees and grids, shortest-path routing is possi- ble given only the ad d resses of the current and destination nod es. The R T size in either case scales logarithmically . This scaling p erformance can b e exten ded b ey ond regular grids and trees to muc h wider classes of graph s, b ut not with hierarc hical routing. The simplest example is routing on star graphs. These graphs are trees, b ut no hierarchical aggrega- tion is p ossible on them. Logarithmic scaling in such cases is p ossi ble du e only t o sp ecialized addressing techniques that leve rage top ologica l p eculiarities of a graph’s structure t o succinctly encapsulate the location of a n ode into its ad- dress. Of course, these addressing tec hniques w ork trivially for regular grids and trees as wel l. Recent progress in this area ind icates that the efficiency of these types of add ressing schemes is directly related to ex- istence of low-distortion embeddin gs of finite met ric spaces induced by shortest-path distances in grids and trees into normed spaces of low dimension [26]. Lo w dimensions of host sp aces guarantee small R T sizes, while lo w distortion of embeddings corresp onds to small stretch. Grids embed in flat Euclidean spaces, but trees require spaces of negative curv atu re [27, 28]. 4.4 Scale-fr ee graphs According to th e b est av ailable data [29], t he Internet top olog y is neither a tree nor a grid. Rath er, it is sc ale-fr e e . T o av oid terminology disputes, by sc ale-fr e e we simply mean netw orks with h ea v y-tail, e.g., p o wer-la w, no de degree dis- tributions and strong clustering, i.e., large numbers of trian- gular subgraphs. 3 The latter characteristi c implies that such graphs are not trees at all. The former, on the other hand, means that in theory , th e avera ge distance in them grows with the netw ork size muc h more slowl y than Kleinro c k and Kamoun [20] assumed: at most ¯ d ( n ) ∼ log n [30]. In p rac- tice, th e av erage hop distance b et w een aut onomous systems in the Internet sta ys virtu ally constant or even decreases due to increasing in ter-AS connectivity driven by economic or p erformance considerations [31, 7, 4]. A ccording to multi- ple d ata sources, the av erage AS - hop distance in the current Internet is b et w een 3.1 and 3.7, with more th an 80% of AS pairs b eing 2-4 hops aw ay from eac h other [29]. T op ologie s with small av erage d istances are also called smal l worlds . There are essentia lly no remote no des in small-w orld net- w orks; all n o des are close to eac h other. These characteristics are extremely bad news for hierar- chica l routing app roac hes, b ecause the effectiveness of hier- arc hical n et work partitioning and aggregation dep ends ei- ther on th e abundance of remote notes or on strong regular- it y of b -ary tree structure. None of these prop erties is present in scale-free graphs. In sh ort, we are faced with an un set- tling reality: one c annot hop e to find a way to efficiently apply hier ar chic al, aggr e gation-b ase d r outing to Internet -like top olo gies. These general arguments d o not preclude th e p ossibilit y of applying some generic hierarchica l routing algorithm to the Internet. But t h ey do imp ly th at such an application cann ot b e efficien t and w e must prepare to see high stretch. Sim- ple analytical estimates [32] show th at apply ing hierarchical routing to an Internet AS- lev el t op ology incurs a ∼ 15-times 3 There is an unfortunate terminological collision here: clus- tering means b oth groupin g no des into areas and presence of triangles in a graph. path length increase, which, although alarming enough by itself, would also lead to a substanti al R T size surge caused by manual reinsertion. If we accept our argument in Section 3 that any tru ly scal- able Internet routing algorithm must h a ve stretch as close as p ossible to 1, w e m ust also accept t he fact that hierar- chica l routing will not meet our needs. S in ce all prev ious Internet interdomain routing prop osals are heavily based on hierarc hical routing, we recognize that while dep lo yin g one of them might offer short-term relief, none of them would genuinely scale to meet future demands. 5. UNIVERSAL COMP A CT R OUTING Compact routin g researc h establishes fundamental limits for routing scalability , and constructs concrete rout in g al- gorithms (or schemes ) that try to meet these limits. F or- mally , a rout ing scheme is said t o b e c omp act if it pro duces logarithmic address and header sizes, a sublinear R T size, and stretch b ounded by a constant, as opp osed to t h e grow- ing stretch more typical of hierarc hical routing. 4 A rout- ing scheme is uni vers al if it works correctly and satisfies promised scaling b ounds on all graphs. If it does so only on some specific graph classes, it is called sp e ciali ze d . W e can exp ress fundamental limits of routing scalability using lower b ounds on R T size versus stretch. F or example, w e can fix the maximum stretch and establish the m in imum R T size for this stretc h. Such a task usually in volv es con- structing a concrete wors t-case graph, enumerating R T size requirements of al l p ossible routing sc hemes, and demon- strating that no routing scheme, applied to th is w orst-case graph, pro duces an R T smaller than the minimum [33 ]. A s soon as w e hav e constructed a concrete routing sc heme, we can establish its upp er b ounds , i.e., the maximum R T size and stretch it p roduces across all graphs. I f a scheme’s up- p er b ound eq uals the theoretical low er b ound, t he scheme is said to b e optimal . The low er b ounds for u niv ersal stretch-1 (shortest-path) routing are somewhat p essimis tic. W e first notice that we can construct R Ts at each no de by storing, for every des- tination no de, the ID of the outgoing p ort on the short- est path to the destination. The num b er of d estinations is n − 1, th e maxim um num b er of p orts a no de can hav e ( eq ual to max imum possible no de degree) is also n − 1, and thus a maximum O ( n log n ) bits of memory is required for an R T, i.e., O ( n lo g n ) is its up per b ound. This construction is called trivial shortest-p ath r outing , and all d eplo yed LS-, DV-, or PV-based routing proto cols implement it. How ever, Ga voil le and P ´ erenn` es [17 ] sho w ed that t he lo wer b ound of universal stretch-1 routing is also Ω( n log n ), i.e., th ere is no shortest path rout in g scheme th at for all no des in all graphs, guaran tees R Ts smaller than the R Ts of trivial shortest-path routing. In other words, shortest-p ath r outing is inc ompr ess- ible . In order to decrease the maximum R T size, we therefore must allo w maximum stretch to increase ab o ve 1. Ga voil le and Genegler [33] show ed that for any stretch strictly b elo w 3, the lo cal space low er b ound is nearly the same as for stretc h-1 routing, Ω( n ), meaning that no un i- versa l stretch < 3 routing scheme can guarantee su b linear R T sizes: the minimum val ue of maximum stretch allo wing sub - linear R T sizes is 3. Thorup and Zwick [34] prov ed that any 4 F or example, one can verif y that on an n -n ode full mesh, [20] produces stretch growing to infinity as Θ(log n ). routing sc heme with stretch strictly b elo w 5 cannot guar- antee space smaller than Ω( n 1 / 2 ). It is widely b eliev ed (al- though not yet prov en) t hat stretc h b elo w 2 k − 1 imposes an R T size low er b ound of Ω( n 1 /k ) for all p ositiv e integers k . Besides b eing un iv ersal or specialized, another imp ortant classification of routing sc hemes is whether they supp ort name indep endenc e . Name- dep endent schemes em b ed some top olog ical information in node add resses (or lab els ) whic h thus cannot b e arbitrary . W e analyze a few classic examples of such add ressi ng in Section 4. Name- indep endent schemes w ork on graphs with arbitrary , e.g., flat, nod e lab els. As discussed in Section 2, scalable name-indep endent sc h emes are highly desirable for future Internet routing. The d istinc- tion b etw een these tw o cases is directly related t o a p opular discussion theme in the n et working communit y , in whic h terms suc h as “no de name” or “node identifier” essentially refer to the name-indep endent, top ologically agnostic lab el, while terms “no de add ress” or “nod e locator” usually im- ply a top ologica lly informativ e no de lab el, i.e., the name- dep endent lab el. Somewhat surprisingly , the low er and up- p er bou n ds for both name-dep endent a nd name-indep endent universal routing are essentially t he same. 5.1 Name-depende nt routing Kleinrock and K amoun’s hierarchical approach [20] was essen tially the first n ame-depend en t routing scheme. Be- sides problems discussed in Section 4, t heir scheme provided no algorithm to construct a req uired partitioning for a given netw ork. In sub sequen t works, first Kleinro c k himself, t hen P erlman, and more recently A w erbu c h, Pel eg and oth ers, in- vested muc h effort trying to fi nd efficien t netw ork p artition- ing algorithms n eeded for correct operation of hierarc hical routing. It b ecame evident th at h ierarc hical routin g approaches w ere intrinsical ly sub optimal when Cow en d eliv ered h er com- pact routing scheme [35]. The scheme required no net- w ork p artitioning, i.e., it was non-hierarchical, and it was fairly simple compared to numerous hierarchical routing al- gorithms accum ulated by t h at time. It guaranteed the max- im um stretch 3 and R T size of ˜ O ( n 2 / 3 ). Thorup and Zwic k [25] (TZ) so on impro ved on Co w en’s R T size up per b ound, bringing it to ˜ O ( n 1 / 2 ) while maintai ning stretch of 3. The TZ scheme w as thus the first nearly optimal univer sal stretch- 3 routing scheme because its R T size upp er b ound w as nearly equal to the existing lo w er b ound, up to logarithmic factors implied b y ‘ ˜ ’ in th e ˜ O notation. The TZ scheme is heavily based on the Co wen scheme. Both schemes first prepro cess the graph and select a set of landmarks in it. In the Cow en sc heme, this selection is based on results for dominating set construction, while the TZ sc heme selects landmarks by means of randomized tech- niques. The landmark set sizes in th e Cow en and TZ cases are ˜ O ( n 2 / 3 ) and ˜ O ( n 1 / 2 ), and that is essentially the only difference b et w een the tw o schemes. The most non-trivial part in b oth the algorithms is to gu arantee a prop er balance b et w een t he sizes of landmark sets and clusters. Clusters are defined for every no de v in a graph, and v ’s cluster is the set of n odes that are closer to v than to their corresp onding closest landmarks. The TZ scheme, for example, guarantees that not only the landmark set size, but also the cluster size is upp er-b ounded by ˜ O ( n 1 / 2 ). The sc hemes then assign to all no des v th e addresses, or lab els, consisting of t he follo w- ing th ree parts: v ’s original iden tifier, the identifier of the landmark L ( v ) closest to v , and the identifier of the inter- face at L ( v ) that lies on the shortest p ath from L ( v ) to v . The R T at v consists of the next hops along shortest paths to all land marks and all no des in v ’s cluster. The R T size is thus ˜ O ( n 1 / 2 ). No de v forwards a pac ket along th e short- est path if the destination is either a landmark or a nod e in v ’s cluster. If v is the closest landmark for the destina- tion, v forw ards the pack et along t he shortest path u sing the interface identifier in the address in the packet header. Otherwise, v forw ards th e pack et t o the landmark closest to the destination—its identifier is in the p acket h eader and the next hop on the shortest-path route to it is in v ’s R T. It is a trivial exercise to c heck that the w orst-case stretch exp erienced by such a routing scheme is 3. 5.2 Name-independe nt routing Abraham et al . [36] improv ed on p revious results by Arias et al. [37] and d eliv ered the first n early optimal un iv ersal name-indep endent routing sc heme, which had the same up- p er b ounds as t he name-dep endent TZ scheme—maxim um stretc h of 3 and ˜ O ( n 1 / 2 ) R T sizes. All name-ind ependent schemes known to us consist of th e follo wing tw o parts: • a name-dep endent c omp act r outing scheme op erating underneath the n ame-independ en t one; and • dictionary tables forming an efficiently-distributed database contai ning information necessary to translate nod es’ name-indep endent addresses ( flat identifiers) to name-dep endent addresses (lo cators). An imp ortant prop erty of the dictionary tables is that they must b e “everywhere dense” in th e t opology , so t hat any nod e v can resolve all identifiers to locators by consulting dictionary tables of no d es lo cated in v ’s neighborho od only . Obviously , n ode v h as to keep all rout es to no des in its neighborho od. Routin g pro ceed s as follo ws: u p on receiving a pack et destined to identifier X , no de v forwa rds a pac ket to n ode u in its n eigh b orho od th at according to the dic- tionary table constru ction rules ( d ependent on t h e routing sc heme), contains an identifier-to-locator mapping for X . Up on reaching u , the pack et learns the lo cator x for X and proceed s to x as dictated by the u nderlying name-d ependent sc heme. W e emph asize that identifier-to-locator mapping is an in- tegral part of the routing pro cess, and all p erformance b ounds apply to the com bined pro cess of mapping and forw arding. Sp ecifically , name-indep endent R Ts include b oth the R Ts of underlying name-dep endent schemes and th e d ictionary tables, whereas total stretch accoun ts for trav el to a name- resolution no de and th en from it to the d estination along a n ame-depend en t, p otential ly stretched route. This is in contra st to t he separation of DN S n ame resolution and IP routing in the Internet, where D NS is essenti ally an appli- cation run ning on top of IP and requiring routing to work in the first p lace. It is therefore remark able th at there ex- ist b oth name-dep endent and name-indep endent universa l stretc h-3 compact routing schemes with the same ˜ O ( n 1 / 2 ) R T size upp er b ound. 6. COMP A CT ROUTING ON SCALE-FREE GRAPHS One might b e alarmed by the previous section, as it seems to conflict with Section 3 where w e show that b ecause of practical reasons, stretch must b e close to 1. The combi- nation of shortest-path routing incompressibilit y and t he imp ossibility of stretch < 3 routing with sublinear R T sizes seem to imply t h at scalable interdomain routing is imp ossi - ble. Recall, how ever, t hat the stretc h val ues mentioned in Section 5 refer to the maxim um stretch across all p ath s in all graphs, meaning that th ere exists some wors t-case graph 5 on which this maxim um is achiev ed. More imp ortantly , all sc hemes mentioned in Section 5 are universal. S ince they can w ork on all graph s, the w orst-case graph may n ot b e, and usually is not, “Internet-lik e.” W e can consequently exp ect the aver age stretc h of th ese schemes on scale-free graphs be lo w er than 3. But h o w close is it to 1? At first glance, it seems unlikely t hat it could b e to o close to 1, since we saw in Section 4.4 that the stretch of hierar- chica l routing is high on Internet-lik e graphs, and there is no apparent reason to b eliev e that compact routing would b e drastically bett er. I n [32] how ever, the authors show ed that the a verage p erformance of the first optimal stretch-3 sc heme (TZ) [25] on scale-free top ologie s is muc h b etter than its worst case. While TZ’s upp er b ounds are around 2200 for R T size and 3 for stretch, the aver age R T size wa s found to b e around 50 entries for the whole A S -lev el Internet, and the av erage stretc h was only 1.1! These num b ers are striking evidence that, on the same top ology and under the same assumptions, compact routing has dramatically sup e- rior scaling c haracteristics compared to hierarchical rout- ing [20], with its stretch of 15 and R Ts of unb ounded size, and compared to simple routing on AS num b ers (e.g., [15]), with R T sizes of the order of 10 4 . The observ ation in [32] that scale-free graphs yield essen- tially the b est p ossible p erformance of the TZ scheme com- pared to all other graphs w as the first indication that scale- free graphs are optimally stru ct ured for high-p erformance routing. This indication inspired severa l researc h group s to work on construction of sp ecialized routin g sc hemes [38, 39] designed to ut iliz e structu ral p eculiari ties of scale-free graphs in order to improve routing p erformance guaran- tees. The sc hemes in [38, 39] ac hieve logarithmic R T scal- ing and infi n itesimal ly small stretch on scale-free graphs. Both schemes are b ased on the observ ation t h at although scale-free graphs are not trees, trees co ver scale-free graphs without incurring much stretch. As a representa tive example, the sc heme by Brady and Co w en [38] (“B C scheme”) grows one shortest-path tree rooted at th e highest-degree no de and a small fixed number of additional trees to cover edges in th e fringe of a p ow er-law graph. Routing is then confined t o this tree collection ac- cording to the sc h emes d iscussed in Section 4.2. S ince their R T sizes scale logarithmically , the BC scheme ac h iev es log- arithmic scaling. Sp ecifically , it guarantees a maximum R T size of O (log 2 n ). The O (log 2 n ) scaling means that even if the graph size is 2 128 , i.e., if all IPv6-capable d evices inde- p endentl y participate in global routing, then the maxim um routing table size in such an I nternet wo uld still contain not more than 128 2 ∼ 16 , 000 entries! The corresponding limit for IPv4 is ∼ 1 , 00 0. 5 See [33] for an example of th ese worst-case graphs. W e thus see that even though hierarc hical routing ap- proac hes based on address aggregation cannot work effi- cien tly on I n ternet-like top ologies (S ection 4), more mod ern routing algorithms ac hieve essen tially “infinite” scalabilit y on scale-free graphs, if they are static . Can there exist any routing sc hemes t hat scale as w ell on dynamic netw orks? 7. D YNAMIC R OUTING ON SCALE-FREE GRAPHS One of the most limiting assumptions b ehind the routing algorithms w e ha ve considered thus far is that they assume that the netw ork is effectively static. More precisely , it is not th at the n et w ork is actually static p er se , b ut that th e routing algorithms require a full v iew of the graph repre- senti ng th e netw ork top ology at any given in stant in time. Any top ology change yields a new graph, on which the algo- rithm might hav e t o p erform its calculations from scratch. This b eha v ior is chara cteristic of currently-deplo yed Inter- net routing algor ithms as w ell. The most basic parameter measuring the dy n amic p erfor- mance of routing algorithms is the c ommunic ation c ost —the num b er of control messages needed to conv erge after a top ol- ogy change. Co mmunication costs are as imp ortan t as R T size or stretch. They are asso ciated with no des requiring prop erly up dated information ab out th e netw ork top ology in order to route. Deploy ed routing proto cols, for example, require all n o des to have a coherent f ul l view of the net- w ork top ology or of the distances in it. Indeed, link-state algorithms, typicall y used for in tra-domain routing, require eac h nod e to h a ve a complete v iew of al l links in the n et- w ork, and each no de p erforms a shortest-path computation on essentially a static graph. Distance- or path-vector al- gorithms need eac h no de t o k no w distances or paths to al l other nodes in the net wo rk. In order to ac hieve such coherent full v iews of the netw ork top olog y , timely up date messages, a.k.a. r outing up dates , are emplo yed. Up dates req uiring recalculation of routing tables can lead to dela y , instabilities, ch urn, and other complica- tions. F or example, there are BGP oscillation scenarios with infinite comm unication costs [40, 41], and even d uring more typical BGP b eha vior, they are ex ponential [3]. High com- municatio n costs and resulting long conv ergence times are b oth a critical problem and an absolutely inevitable impli- cation of growth of the current rout ing architecture [1]. Using fairly general argumen ts, Afek et al. [42] sh ow ed that the communication cost cannot scale b etter than Ω( n ). Their results app lied to universal schemes, so w e could still hop e that schemes sp ecialized for scale-free graphs w ould b eha ve b etter, as th e Ω( n ) b ound could be attained only on some marginal w orst-case graphs. After seven teen years of little progress on this problem, Korman and Pele g have re- cently tried to improve this p essimistic lo wer b ound in [43]. Unfortunately for Internet routing, their results are even more p essimistic than Afek’s since w e use th em, combined with simple analytic estimates, to demonstrate in the Ap- p endix that the comm unication cost low er b ound for scale- free graphs is ˜ Ω( n ). This finding means that as far as com- municatio n costs are concerned, Internet-like gr aphs b elong to the class of worst-c ase gr aphs, acr oss al l p ossible network top olo gies! 8. LOCA TOR-IDENTIFIER SPLIT (LIS) Despite all the fin dings mentioned ab ove, a p opular pro- p osed approach to Internet routin g scalabilit y and fl exibilit y is to separate t he identifier and lo cator of a no de in th e net- w ork. In an architecture where one lab el identifies a nod e and a different lab el indicates its lo cation, top ology changes will only change the lo cators, whic h are assumed to follo w top olog y and allow for aggressive aggregation. Other func- tions (access control lists, application and transport lay er identificatio n of endp oin ts) can use th e identifiers. This w ould supp ort significantly enh anced flexibility of t he I n ter- net routing system, bu t do es it really address the scalabilit y concerns? In light of t he discussion in Sections 4.4, 5.2, and 7, w e must admit th at LIS cannot really improv e rout ing scalabil- it y , for at least tw o reasons: • Since LI S approaches are based, explicitly or implic- itly , on aggressiv e aggregation of lo cators, they cannot impro ve scaling of R T sizes b ecause such aggregation is imp ossible on scale-free top ologies; • Even if LIS approaches did not use aggress ive aggre- gation, they still could not improv e scaling, b ecause in addition to mainta ining and up dating R Ts of lo- cators as b efore, the netw orks must also maintain and up date a (d istributed) database of identifier-to-locator mappings. T o ground these claims more firmly , w e first observe that name-indep endent routing from Section 5.2 naturally imple- ments LIS . In fact, the only conceptu al difference b et w een name-indep endent rout in g and LIS is that the former is more flexible th an the latter, since it do es not assume that loca- tors, i.e., name-d ep endent addresses, are amenable t o ag- gressiv e aggregation. It is obvious, how ever, that th e aver age scaling chara cteristics of name-indep endent schemes cannot b e b etter than name-d ependent ones, since the name in- dep endent schemes are essentially name dep endent schemes plus something else , i.e., plus dictionary tables and identifier- to-locator name-resolution, which incurs b oth R T size in- crease and stretch, cf. Section 5.2. T o exp erimentall y confirm this reasoning, we implemen ted the b est-performing name-d ependent a nd name-ind ependent sc hemes. Sp ecifically , among name-dep endent schemes, w e chos e the universal opt imal stretch-3 TZ scheme [25] and the BC scheme [38] designed for scale-free graphs. W e also tested th e TZ/BC hybrid scheme, which simply selects the lo w er-stretch path b y run ning b oth schemes in parallel. F or the name-indep endent case, we tested the opt imal u niv er- sal Abraham scheme [36]. W e then app lied all schemes to AS-level Internet top olog ies measured by skitter [44] and DIMES [45], and calculated the resulting av erage R T size and stretch. T able 1 and Figure 1 show t h e outcome of t hese exp erimen ts, revealing th at all characteri stics of the n ame- indep endent routing are significantly worse than their name- dep endent counterparts. By no means do these observ ations conflict with our statements in Section 5 t hat the worst-c ase scaling of n ame-depend en t and name-indep endent universal routing schemes is the same. They do show, how ever, th at name-indep endent scaling on Internet top olo gies is muc h w orse on aver age . F urth ermore, our findings are consistent with th e scal- ing prop erties of name-indep endent routing on trees. W e T able 1: The av erage stretch and routing table sizes (in entries and bi ts) that the b est p erforming name- dep enden t (BC, T Z, and their hybrid TZ/BC) and name -independent (Abraham) schemes pro duce on the skitter and DIMES topologie s. Scheme skitter (9204 no des) DIMES ( 13931 n odes) TZ 62 entri es (1629 b its), 1.08 stretch 69 entries (1887 bits), 1.13 stretc h BC 22 entri es (1025 b its), 1.06 stretch 22 entries (1103 bits), 1.03 stretc h TZ/BC hybrid 84 entries (2654 bits), 1.02 stretch 91 entries (2990 bits), 1.01 stretch Abraham 3251 entries (240427 b its), 1.35 stretch 4145 entries (32678 1 bits), 1.45 stretch mentio n trees h ere b ecause t ree routing from Section 4.2 forms the core of routing schemes sp ecialize d for Internet top olog ies in Section 6. Un fortunately , as found in [46, 47], name-indep endent routing on trees cannot scale b etter th an on general graphs. In other wo rds, tr e es ar e the worst-c ase gr aphs f or universal name-indep endent r outing . 6 The rea- son for that is simple: trees cannot guarantee that nod es’ neighborho ods, i.e., b alls of small radii that store dictionary tables, comprise only small p ortions of the graph. Examples of graphs that satisfy this prop ert y are grids or their p er- turbations from Section 4.1, i.e., graphs of low doubling di- mension. The av erage distance in th ese graphs gro ws quickly with th e graph size, the relativ e size of no des’ neighborho ods can thus b e made small, and as a consequence, the R T sizes of name-indep endent routing scale logari thmically on such graphs [21]. W e summarize these scaling characteristics in T able 2. 9. CONCLUSION Compact routing is a research area t hat aims at solving the follow ing t wo classes of problems: 1) identify the fund a- mental scaling limits (lo we r b ounds) of routing on graphs; and 2) construct routin g algorithms that meet those lim- its, i.e., whose upp er b ounds are equal to the correspond in g lo w er b ounds. In other words, compact routing reveals the most fundamental properties of routing scalabilit y , refin ed from lay ers of complexity asso ciated with routing in prac- tice. As such, compact routing algorithms offer remark ably b et- ter scaling than w e observe in the Internet routing to day . In particular, existing interdomain routing exh ibits exp onen- tially growing routing table sizes, while those of compact routing algorithms designed for I n ternet-like topologies scale logarithmicall y . Logarithmic scaling is essentially the only scaling b eha vior that satisfies the requ iremen t for a future routing architec- ture to “scale indefinitely” [2]. Unfortunately , only static and n ame-depend en t, i.e., top ology-a w are, routing exhibit logarithmic scaling on observed Internet t opologies. If n ame-indepen dence is a requirement, i.e., if we need to route on top ology-unaw are flat identifiers, then routing tables cann ot scale b etter than p olynomial ly on Internet- lik e top ologies. T he low er b ound is Ω( n ) for shortest-p ath routing, Ω( √ n ) for stretch-3 routing, and more generally , Ω( n 1 /k ) for routing with stretc h of 2 k − 1, k = 1 , 2 , . . . . W orse than th at, the communicatio n cost, i.e., the num- b er of routing control messages p er top ology change, can- not grow slo w er th an linearly on Internet-like top ologie s. Of course, this scaling is still muc h b etter than the exp onen tial 6 More specifically , Abraham et al. [47] explicitly use stars to pro ve th e name-ind ependent low er b ounds. comm unication costs of deploy ed routing p rotocols, bu t lin- ear scaling can definitely not b e considered as satisfying th e requirement of “infinite scalabilit y .” W e are at an apparent impasse. Routing sc hemes sp e- cialized for static Internet-lik e graphs scale essentially in- definitely , but in adding th e associated up dates required to handle dynamic graphs, we can no longer guaran t ee the re- quired scaling b eha vior. W e m ust face the reality that scal- able routin g which uses top ology up date messages to dy- namically react to t op ology changes is not p ossible in prin- ciple, which explains, in part, the lack of significant progress in search of t ruly scalable routing. W e t h us conclude that in order to fi nd approac hes that would lead us to required routing scalabilit y , we need some radically new ideas that w ould allo w us to construct con vergence-free , “upd ateless ” routing requiring n o full view of netw ork top ologies . It is widely known and p opularized that ha ving no full v iew of social netw ork topologies, humans can still efficiently route messages through them [48 ]. Whether we can devise rout in g protocols that w ould do the same for the Internet is an op en question. 10. A CKNO WLEDGEMENTS This work is supp orted in part by NSF CNS-0434996 . 11. REFERENCES [1] D . Meyer, L. Zhang, and K. F all (Eds.). Rep ort from the I AB w orkshop on routing and addressing. IR TF, Internet Draft, 2007. http://www .ietf.org/in ternet- drafts/draft- iab- raw s- report- 0 2 . t x t . [2] A . D oria, E. Davies , and F. Kastenholz (Edts.). Requirements for inter-domain routing. I R TF, Internet Draft, 2006. [3] C. Lab o v itz, A . Ahuja, A. Bose, and F. Jahanian. Dela yed Internet routing conv ergence. T r ansactions on Networking , 9(3), 2001. [4] BGP T able Data, http://bgp .potaroo.net / . [5] G. Huston. Scaling in ter-domain routing—a view forw ard. T he Internet Pr oto c ol Journal , 4(4), 2001. [6] G. Huston. Commentary on inter-domain routing in the I n ternet. IETF, RFC 3221, 2001. [7] A . Broido, E. N emeth, and k c claffy . I n ternet expansion, refinement, and ch u rn. Eur op e an T r ansactions on T ele c ommunic ations , 13(1):33–51 , 2002. [8] H . N ara yan, R. Govindan, and G. V arghese. The impact of address allocation and routing on the structure an d implementation of routing tables. In SIGCOMM , 2003. [9] Beyond BGP. http://www.bey ondbgp.net/ . 82 84 86 88 90 92 94 96 97+ 0 2000 4000 6000 8000 10000 12000 14000 Hybrid TZ/BC name−dependent scheme Number of entries in routing table Nodes skitter DIMES 3200 3400 3600 3800 4000 4200 100 200 300 400 500 600 700 800 Abraham name−independent scheme Number of entries in routing table Nodes skitter DIMES Figure 1: The di stributions of stretc h (top ro w) and routing table size (bottom row) that the hybrid TZ/BC (left column) and A braham (righ t column) schemes produce on the sk itter and DIMES topol ogies. [10] P . V erk aik, A. Broido, kc claffy , R . Gao, Y. H yun, and R. v an der Pol. Beyond CIDR aggregation. T echnical Rep ort TR- 2004-1, CAIDA, 2004. [11] Internet En gineering T ask F orce (IETF). Site multihomi ng in IPv6. W orking Group. [12] F. Kastenholz. ISLA Y: A new routing and addressing arc hitecture. IR TF, Internet Draft, 2002. [13] I. Castineyra, N. Chiappa, and M. Steenstrup. The nimrod routing architecture. IETF, RFC 1992, 1996. [14] R. Gummadi, R. Govindan, N. K othari, B. Karp, Y.-J. Kim, and S. Shenker. Reduced state routing in the I n ternet. In HotNets , 2004. [15] L. Subramanian, M. Caesa r, C. T. Ee, M. Handley , M. Mao, S . Shenker, and I. S toica. HLP: A next generation in ter-domain routing p roto col. In SIGCOMM , 2005. [16] M. Caesar, T. Condie, J. Kannan, K. Lakshminara yanan, I. S toica, and S. Shenker. ROFL: R outing on flat labels. In SIGCOMM , 2006. [17] C. Gav oille and S. P ´ erenn` es . Memory requ iremen t for routing in d istributed netw ork s. In PODC , 1996. [18] N. Spring, R. Maha jan, and T. Anderson. Quantif ying the causes of path inflation. In SIGCOM M , 2003. [19] J. Behrens and J. J. Garcia-Luna-Aceves . Distributed, scalable rou t ing based on link-state vectors. In SIGCOMM , 1994. [20] L. Kleinro ck and F. Kamoun. Hierarc hical routing for large net wo rks: Perf ormance ev aluation an d optimization. Computer Networks , 1:155–17 4, 1977. [21] I. Abraham, C. Ga voille, A . Goldb erg, and D. Malkhi. Routing in netw orks with low doubling dimension. In ICDCS , 2006. [22] P . Indyk and J. Matou ˇ sek. Handb o ok of Discr ete and Computational Ge ometry , chapter 8, Low-Distortio n Em b eddings of Finite Metric Spaces. Chapman & Hall/CR C, Boca Raton, 2004. [23] I. Abraham, Y. Bartal, T.-H. H. Chan, K. Dhamdhere, A. Gupta, J. Klein b erg, O. Neiman, and A . Slivkins. Metric em b eddings with relaxed guaran tees. In F OCS , 2005. [24] P . F raigniaud and C. Gav oille. Rout ing in trees. In ICALP , 2001. [25] M. Thorup and U . Zwick. Compact routing sc h emes. In SP AA , 2001. [26] J. Matou ˇ sek. L e ctur es on Discr ete Ge ometry , chapter 15, Em b edding Finite Metric Spaces into Normed Spaces. Springer, New Y ork, 2002. T able 2: Routing table (R T) size scali ng for name-dep endent and name-indep endent routing on different graph classes . Both “Logarithmic” and “Polynomial” tags i n this table hav e sp ecific meanings. “Logarithmic” means that R T sizes scale as Ω(log n ) even for shortest-path (stretc h-1) routing. “P olynomial ” means Ω( n ) for stretc h-1 routing, Ω( √ n ) for stretch -3 routing, and more generally , Ω( n 1 /k ) for routing with stretch of 2 k − 1 , k = 1 , 2 , . . . . Graph class Name-dep endent routing Name-indep endent routing General graphs P olynomial P olynomial T rees Logarithmic P olynomial Grids Logarithmic Logarithmic [27] R. Krauthgamer and J. R. Lee. Algorithms on negative ly curved spaces. I n FOCS , 2006. [28] R. Kleinberg. Geographic routing u sing hyperb olic space. In I NF O COM , 2007. [29] P . Mahadev an, D. Kriouko v, M. F omenko v , B. H uffak er, X. Dimitrop oulos, kc claffy , and A. V ahdat. The I n ternet AS- lev el top olo gy: Three data sources and one definitive metric. Computer Communic ation R eview , 36(1), 2006. [30] F. Chung and L. Lu. The a verage distance in a random graph with given exp ected d egrees . Internet Mathematics , 1(1):91–11 4, 2003. [31] J. Lesko vec, J. Kleinberg, and C. F aloutsos. Graphs o ver time: Densification laws , shrinking diameters and p ossi ble explanations. In KDD , 2005. [32] D. Kriouko v, K. F all, and X. Y ang. Compact routin g on Internet-lik e graphs. In I NF OCOM , 2004. [33] C. Gav oille and M. Genegler. Sp ace-efficiency for routing sc hemes of stretch factor three. Journal of Par al lel and Distribute d Computing , 61(5):679–687, 2001. [34] M. Thorup and U . Zwick. App ro ximate distance oracles. In STOC , 2001. [35] L. Co we n. Compact routing with minimum stretc h. Journal of Algorithms , 38(1):170– 183, 2001. [36] I. Abraham, C. Ga voille, D . Malkhi, N. Nisan, and M. Thorup . Compact name-indep endent routing with minim um stretch. I n SP AA , 2004. [37] M. Arias, L. Cow en , K. A. Laing, R. R a jarama n, an d O. T ak a. Compact routing with name indep endence. In SP AA , 2003. [38] A. Brady and L. Cow en. Compact routing on p o wer-la w graphs with additive stretch. In ALENEX , 2006. [39] S. Carmi, R. Cohen, and D. Dolev. S earc hing complex netw orks efficiently with minimal information. Eur ophysics L etters , 74:1102–11 08, 2006. [40] T. Griffin and G. Wilfong. An analysis of BGP conv ergence prop erties. I n SIGCOMM , 1999. [41] T. Griffin and G. Wilfong. Analysis of th e MED oscillatio n problem in BGP. In ICNP , 2002. [42] Y. Afek, E. Gafni, and M. R ic k lin. Upp er and low er b ounds for routing sc hemes in dyn amic netw orks. In FOCS , 1989. [43] A. Korman and D. Pele g. Dynamic routing sc hemes for general graphs. In ICALP , 2006. [44] CAIDA. Macroscopic top ology AS adjacencies. http://www .caida.org/t ools/measurement/skitter/as_adjacencies.xml . [45] The DIMES pro ject. http://ww w.netdimes.o rg/ . [46] K. A. Laing and R. Ra jaraman. A space low er b ound for name-in d ependent compact routing in t rees. In SP AA , 2005. [47] I. Abraham, C. Ga voille, and D. Malkhi. On space-stretc h trade-offs: Low er b ounds. I n SP A A , 2006. [48] S. Milgram. The small worl d problem. Psycholo gy T o day , 1:61–6 7, 1967. [49] S. N. Dorogo vt sev, J. F. F. Mend es, and A. N. Samukhin. Metric structure of random netw orks. Nucle ar Physics B , 653(3):307– 422, 2003. APPENDIX W e demonstrate th at the low er b ound for comm unication costs in random scale-free graphs of size n is ˜ Ω( n ). The av- erage distance ¯ d in such graphs grow s logarithmicall y with n , ¯ d ∼ log n [30, 49], while t he width (standard deviation) of the d istance distribution app roac hes zero in t he large graph limit [49]. The latter prop ert y implies that t he distance d is- tribution d x ( r ) for every no de x , i.e., the num b er of nod es located at distance r from x divided by n , approaches a delta-function as n → ∞ : d x ( r ) − − − − → n →∞ ( 1 if r = ¯ d ∼ log n , 0 otherwise. (1) Korman and Peleg [43] define the l o c al density as D = max x,r | B x ( r ) | 2 r , (2) where B x ( r ) is the ball of radius r aroun d no de x , i.e., the set of no des lo cated within distance at most r from x , and | B x ( r ) | is th e size of this set. The maximum is taken o ver all nod es x in the graph and all rad ii r . Observing that | B x ( r ) | = n R r 0 d x ( ρ ) dρ and using eq. (1), we immedi- ately obtain that | B x ( r ) | in large scale-free graphs is given by the Hea viside function: | B x ( r ) | − − − − → n →∞ ( n if r > ¯ d ∼ log n , 0 otherwise. (3) Substitution of this expression into eq. (2) yields D − − − − → n →∞ n log n . (4) The last expression and the demonstration in [43] that the comm unication cost low er b ound for graphs with local den- sit y D is Ω( D ) complete the proof.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment