Asymptotically Optimum Universal One-Bit Watermarking for Gaussian Covertexts and Gaussian Attacks
The problem of optimum watermark embedding and detection was addressed in a recent paper by Merhav and Sabbag, where the optimality criterion was the maximum false-negative error exponent subject to a guaranteed false-positive error exponent. In part…
Authors: P. Comesa~na, N. Merhav, M. Barni
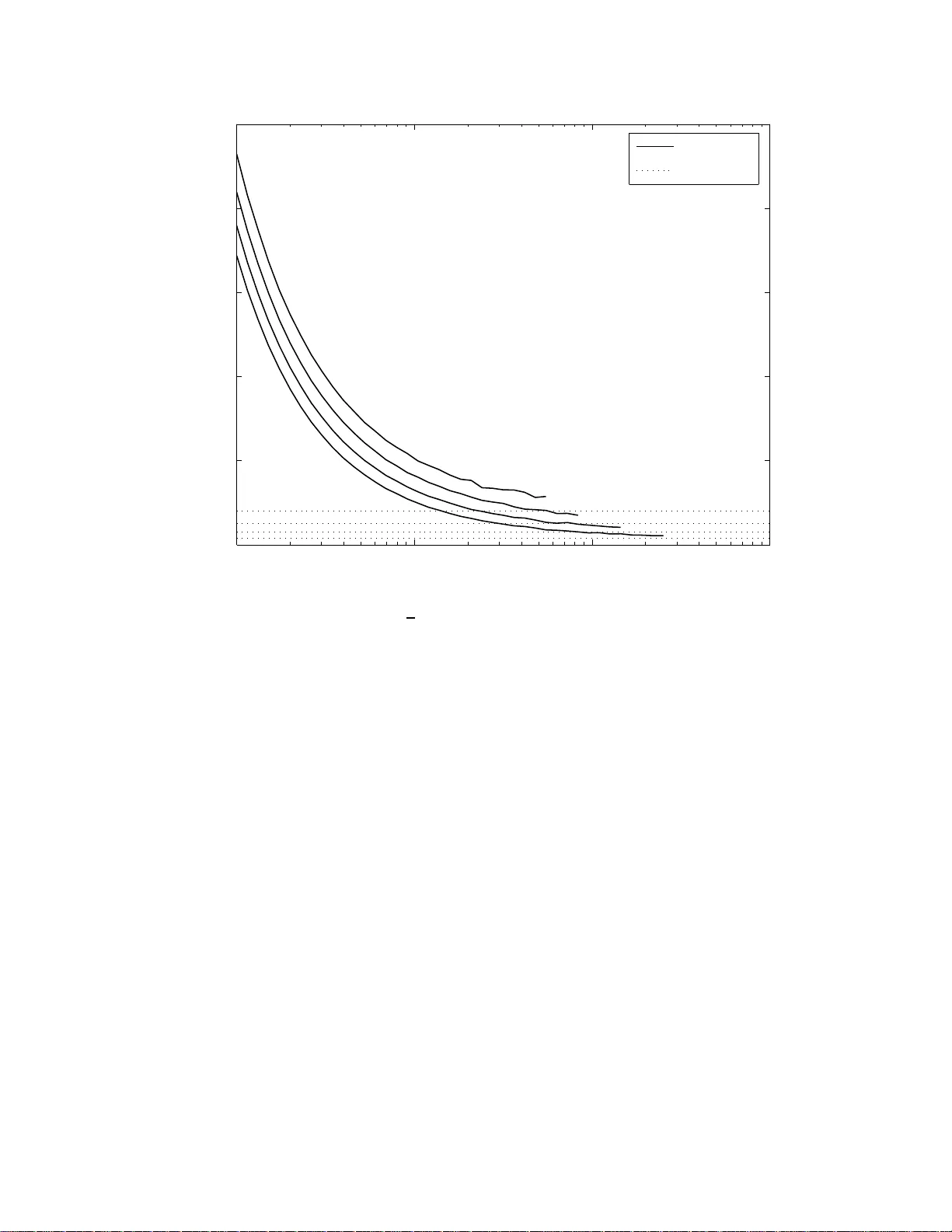
1 Asymptotically Optimum Uni v ersal One–Bit W aterma rking for Gauss ian Co v erte xts and Gaussian Attac ks Pedro Comesa ˜ na, Neri Merha v , and Mauro Barni Abstract The problem of optimum watermark embedding and detection was addressed in a recent paper b y Merhav and Sabbag, where the optimality criterion was the maximum false–negati v e error exponent subject to a guaran teed false– positi ve error exponen t. In particular , Merhav and Sabbag deriv ed unive rsal asymptotically optimum embedding and detection rules u nder the assumption that the d etector relies solely on second o rder joint empirical statistics of the recei ved signal and the watermark. In the case of a Gaussian host signal and a Gaussian attack, ho wever , closed–form express ions for the optimum embedding strategy and the false–ne gativ e error expo nent were not ob tained in that work. In this paper , we deriv e such expressions, again, under the univ ersality assumption that neither the host v ariance nor the attack po wer are kno wn to either the embedder or the detector . The optimum emb edding rule turns ou t to be very simple and with an intuitively–a ppealing g eometrical interpretation. The imp rov ement wi th respect to existing sub–optimum schemes is demonstrated by displaying the optimum false–neg ativ e error exp onent as a function of t he guaranteed false–positi ve error exp onent. Index T erms W atermarking, watermark embedding, watermark detection, hypothesis t esting, Neyman–Pearson . P . Comesa ˜ na is wi th the Signa l Theory and Communications Depa rtment, Uni versity of V igo, Ca mpus Lago as-Marcosend e, V igo 36310, Spain, (phone : +34 986 812683, fa x: +34 986 812116, e-mail: pcomesan@gts.tsc.uvi go.es), N. Merhav is with the Department of E lectri cal Engineeri ng, T echnion – I. I.T . , Hai fa 32000, Israel, (phon e/fa x: +972-4-8 294737, e-mai l: merha v@ee.tec hnion.ac.il ), M. Barni is with the Departmen t of Informati on Engineeri ng, Univ ersity of Siena, V ia Roma 56, Siena 53100, Italy , (phone: +39 0577 234624 / +39 0577 234621, fax: +39 0577 233630, e-mail: barni@dii.unisi.it ). This work was parti ally supported by the Italian Ministry of Researc h and E ducatio n under FIRB project no. RBIN04A C9W . Novem ber 13, 2018 DRAFT 2 I . I N T RO D U C T I O N About a decade ago , th e comm unity o f resear chers in the field of watermarking a nd data h iding has learned a bout the imp ortance and r elev ance of the problem of chann el co ding with non– causal side infor mation at the transmitter [1], and in particular , its Gaussian version – wr iting on dirty paper , due to Costa [2], along with its direct applicability to watermark ing, cf. [3], [4]. Costa’ s main result is that the capacity of the ad ditiv e white Gaussian noise (A WGN) channel with an additional independe nt interfer ing signal, known non–cau sally to th e transmitter o nly , is the same as if this interfer ence was av ailable at the decod er as well (or altogeth er n on–existent). Whe n applied in the realm of watermar king an d d ata hid ing, this means that th e host signal (play ing the role o f the inter fering sign al), sh ould not be actually con sidered as additional no ise, since the embed der (the transmitter) can incorporate its k nowledge upon generatin g the w atermarked signal (the codew ord). The methods based on this paradigm , u sually known as side-informed methods, can even asym ptotically elimina te ( under som e particu lar con ditions) the interfe rence of the host signal, that was previously b elieved to be in herent to an y watermark ing sy stem. Ever since the relev ance o f Costa’ s result to watermarking has b een o bserved, numero us work s have been published about the practical implementation of the side–infor med paradigm for the so-called multi–bit watermarking [4], [5] , [6], [7] case, where the decoder e stimates the transmitted message among ma ny po ssible messages. Far less attention has been devoted, h owe ver , to the pr oblem of d eciding on the presence or absence of a gi ven watermark in the observed signal. In f act, in most of the works that deal with this bin ary hypo thesis testing problem , usu ally known as one– bit (a. k.a. zero–bit) w atermark ing, the watermar king displac ement signal does n ot depen d on the the h ost [8] , [9], [10], [1 1], [1 2] that then inter feres with the watermark , thus con tributing to au gment the error probab ility . T o the best o f our kn owledge, exceptions to this statement are the works by Cox et al. [ 3], [13], Liu and Mo ulin [ 14], Merhav and Sabbag [ 15] and Furo n [1 6]. In the next few par agraph s, we briefly de scribe the main results con tained in these w orks. Cox et. al. [3], [13] : In [3], Cox et. a l. intro duce the p aradigm of watermarking as a coded com municatio n system with side info rmation at the embe dder . Based o n this para digm, and by con sidering a statistical mod el for attacks, the autho rs pro pose a detection r ule based on the Neyman –Pearson criterion . The resulting detection region is replaced by the union of two h yperco nes; m athematically , this detection rule is given by | s t · u | k s k·k u k ≥ τ ( α ) , where s is the recei ved signa l, u is t he watermark, s t is the transpose of s , s t · u is the inner product of s and u , α is the maximum a llowed false–positive pr obability , and τ ( α ) is the decision th reshold, wh ich is a f unction of α . In a successiv e pap er [1 3], Miller et al. a lso compare the perfo rmance of the strategy of [3] to other typical e mbeddin g strategies. No attem pt is mad e to jointly design the o ptimum embed ding and detectio n rules. Liu and Moulin [14] : In [14], both false–positiv e and false–negati ve err or e xpon ents are studied for the one– bit watermarking p roblem , both for ad ditiv e spr ead sp ectrum (Add-SS) an d a q uantization index modu lation (QIM) technique [4]. The constrain t on the embedd ing distor tion is expr essed in terms of the m ean Euclid ean nor m o f th e watermarking displacem ent signal, and th e no n–watermarked signal is also assumed to b e attacked ( with attacks that impact the false–positi ve error p robab ility). For Ad d-SS, exact expressions o f the er ror exp onents o f both Novem ber 13, 2018 DRAFT 3 false–positiv e and false–negati ve prob abilities are d erived. For QIM, the author s pr ovide b ound s o nly . These results show that altho ugh the error expone nts o f QIM are in deed larger than those o btained by public Ad d-SS (where the host signal is not a vailable at the detector), the y a re still s maller than those com puted f or priv ate Add-SS (where the h ost signal is also a vailable at the detector). This seems to indicate that the interfere nce d ue to the host is not completely rem oved. Merhav and Sabbag [15] : In [ 15], th e p roblem of o ne–bit watermarking is approached from an informa tion– theoretic po int of view . Optimum embedd ers and detectors are soug ht, in the sense of minimu m false–negati ve probab ility subject to the constraint that the false–po siti ve expo nent is gu aranteed to be at least as large as a giv en p rescribed co nstant λ > 0 , und er a ce rtain limitation o n the kin d of em pirical statistics gathe red by the detector . Another featur e of the analysis in [1 5] is th at the s tatistics o f th e host s ignal are assumed unkn own. The propo sed asympto tically o ptimum detection rule comp ares th e em pirical mutu al inf ormation between the watermark u an d the received signal y to a thresho ld d ependin g on λ . In the Gaussian c ase, th is bo ils down to th resholding the absolute value of th e empir ical co rrelation coefficient b etween these two signals. Merhav and Sabb ag also d erive the optimal embedd ing strategy for the attack –free case and der iv e a lower bound on the false–negative error exponen t. Furthermo re, the optimiz ation pro blem associated with u ptimum em beddin g is reduce d to an easily imp lementable 2D pro blem yielding a very simple embedd ing rule. In that paper, Merhav and Sabba g study also the scenario where the w atermarked s ignal is attacked. I n this c ase, howe ver , c losed–for m expressions for the err or exponents and the o ptimum emb edding rule are n ot av ailable due to the complexity of the inv olved optimizations. Fur on [16] : In [1 6], Furo n uses the Pitman –Noether theor em [1 7] to de riv e th e form of th e b est d etector for a g iv en embedd ing function , and the b est embedding fun ction fo r a giv en detection fun ction. By combining th ese results, a dif ferential equation is obtained , that the author refer s to as the fundamental equation o f zer o-bit waterma rking . Furon shows that many of the most popular watermarking methods in the literature can be seen as special cases of the fundamental equation, ran ging from Ad d-SS, multiplica ti ve spread spectru m, or J ANIS [18], to a tw o-sheet hyperb oloid, or even c ombinatio ns o f the pr evious techn iques with watermarking o n a pro jected domain [19], or watermarking based on la ttice quantization . Compared with the framework introd uced in [15], two impor tant differences must be h ighlighted : • In [16], the watermark ing displacem ent signa l is constrained to be a fun ction o f the host signal wh ich is scaled to yield a given embedd ing distortion. T his mean s that in th is set– up the directio n of the watermark ing displacement signal ca n n ot be ch anged as a function of th e allowed embeddin g d istortion. • One of the con ditions that m ust be verified in order to apply th e Pitman–Noeth er theorem is that the p ower o f the watermarkin g disp lacement signal goes to ze ro when the dimensionality increases without bo und. In fact, Furon hypoth esizes that this is the reason why neither the absolute nor malized cor relation nor th e normalized correlation are solutions of the fundamental equation. In this pa per, we extend the resu lts of [15] and derive a c losed–for m expression for the optimum em beddin g and detection strategies in the Gau ssian set–up, that is, for a Gaussian host sign al an d a Gaussian attack chann el. Novem ber 13, 2018 DRAFT 4 As in [1 5], we assume th at the embe dder and the detector do not kn ow the variance of the host signal an d that of the noise added by the attacker . W e also sha re with [15] th e assumption that the detector is of lim ited resources, specifically , that it relies only on th e Eu clidean nor m of the received signal and the emp irical correlation b etween the received sig nal and the watermark . W e d erive explicit emb edding a nd detectio n rules and establish th eir asympto tic optimality in the Neyman–Pearson s ense of maximizing the false–negati ve error exponent for a gi ven guaranteed false–positiv e error e xpon ent. W e also deriv e a closed–form expression f or the false–negati ve e rror expo nent. The optimum embedd ing strate gy turns out to be very simple, and this opens the door to the dev elopmen t of new practical watermarking scheme s f or real– life sign als like images, video or aud io sig nals. Th e imp roved performa nce o f the new sche me is demonstrated both theor etically , by com paring the achie ved err or exponents and those ach ieved by previous m ethods, and numerically , by display ing graph s of the er ror expo nent functions. The remain ing part of the paper is o rganized as follows: In Section II, we introd uce notation conv entions and formalize the problem. In Section III, an asymptotically optim um detection region is derived. In Section IV, we use it to compute the false–negati ve er ror expo nent, whose op timization is con sidered in Section V to derive a correspon ding optimum embedd er . In Section VI, the optimum embedd er and the exact false–negativ e error exponent for the noiseless case are introduce d as a by–pro duct of this analy sis and compared to previous results in the literature. Fina lly , th e main resu lts of th is work are summarized in Section VII wh ere some s uggestion s for future research are a lso ou tlined. I I . N O TA T I O N A N D P RO B L E M F O R M U L A T I O N Throu ghout the sequel, we d enote scalar rand om variables by cap ital letters (e.g., V ), their realizations with correspo nding l ower case letters (e.g., v ), and their alphabets, with the resp ectiv e script font (e.g., V ). The same conv ention applies to n –d imensional r andom vectors and their realizations, using bold face fonts (e.g., V , v ). Th e alphabet o f ea ch corr espondin g n – vector will b e taken to be the n –th Cartesian power of the alphabet of a single compon ent, which will be denoted b y th e alph abet of a single com ponen t with a superscr ipt n ( e.g., V n ). Th e i -th compon ent o f a v ector V is denoted V i . Th e prob ability law of a random vector V is d escribed by its probab ility density fun ction (pdf) f V ( v ) , or its pr obability mass fu nction (pmf) P V ( V = v ) , dep ending on whether it is continuo us or discrete, respectively . Let u a nd x , both n − dimen sional vecto rs, be the waterma rk sequ ence an d the host sequen ce , respec ti vely . Wh ile u i , i = 1 , . . . , n , the compo nents of u , take on b inary values in U = {− 1 , +1 } , 1 the compon ents o f x , na mely , x i , i = 1 , . . . , n , take values in X = I R . The embedd er receives x an d u , and produc es th e watermarked sequ ence y , yet another n –dimensio nal vector with compon ents in Y = I R . W e refer to the difference sign al w = y − x as the watermarking displa cement signal . The em bedder must k eep the e mbeddin g distortion d ( x , y ) = k y − x k 2 within a pr escribed limit, i.e., d ( x , y ) ≤ nD , where D > 0 is the max imum allowed distortion p er d imension, unif ormly for every x and u . 1 The basic deri v ation s of this work will remain val id for diffe rent choice s of U . Novem ber 13, 2018 DRAFT 5 The output signal o f the transmitter may eithe r be the unalter ed o riginal host x , in th e non–watermarked case, or the vector y , in th e watermarked case. In bo th c ases, this output signal is subjected to an attack, which yields a for gery signal, denoted by s . The action of the attacker is modeled by a channel, which is given in terms of a condition al prob ability den sity of the f orgery given the input it receiv es, W ( s | x ) – in the non–watermarked case, or W ( s | y ) – in the watermarked case. For the sake of convenience, we d efine z as th e noise vector ad ded by the attacker, i.e., the d ifference betwe en the forgery signal s an d the ch annel input signal, which is th e transmitter output ( x or y , d ependin g on whethe r the signal is watermarked or no t). W e assum e that z is a Gaussian vector with zer o–mean , i.i.d . compo nents, all having variance σ 2 Z . The detecto r partitions I R n into two complem entary regions, Λ (a.k.a. the d etection region) and Λ c . If s ∈ Λ , the detector decides that the watermark is pre sent, otherwise it decides that the watermark is absent. W e assume that the detecto r k nows the watermark u , but does not k now th e host signal x (blind or pu blic watermar king). The design of the optimum detection region for the attack–free case was stu died in [1 5], and it is generalized to the case of Gaussian attacks in Section III. The perform ance of a one– bit watermark ing system is u sually measured in terms of the tradeo ff between the false po sitive proba bility of decidin g that the w atermark is present wh en it is actually absen t, i.e., P f p = Z Λ d s · [2 π ( σ 2 X + σ 2 Z )] − n/ 2 · exp − k s k 2 2( σ 2 X + σ 2 Z ) (1) and the fa lse negative p robab ility , of decidin g that th e watermark is absent w hen it is actually pr esent, i.e., P f n = Z Λ c d s Z I R n d x · (2 π σ 2 X ) − n/ 2 · exp − k x k 2 2 σ 2 X · (2 π σ 2 Z ) − n/ 2 · e x p − k s − f ( x , u ) k 2 2 σ 2 Z , (2) where f is the embedd ing f unction, that is, y = f ( x , u ) . As n grows without b ound, these probab ilities n ormally decay expo nentially . T he corr espondin g exponen tial deca y rates, i.e., the err o r exponen ts , a re defined as E f p , lim n →∞ − 1 n ln P f p , (3) E f n , lim n →∞ − 1 n ln P f n . (4) The aim of this paper is to devise a dete ctor as well as an embedd ing rule for a ze ro–mea n, i.i.d. Gaussian host with variance σ 2 X and a zero–mea n memo ryless Gau ssian attack channel with noise power σ 2 Z , wh ere the detector is limited to base its decision on the empirical energy o f the received signal and its empirical corr elation with u . Both σ 2 X and σ 2 Z are assumed unknown to the embedder and the detector . W e seek optimum embedding and d etection rules in the sen se of u niform ly m aximizing the false–n egati ve error exponent, E f n , (across all po ssible v alues of σ 2 X and σ 2 Z ) sub ject to th e co nstraint that E f p ≥ λ , where λ is a prescribed positive real. Novem ber 13, 2018 DRAFT 6 I I I . O P T I M U M D E T E C T I O N A N D E M B E D D I N G In [15], an asymptotically optimum detector is derived for the discrete case and for the con tinuous Gaussian case. In the latter case, it is shown th at if the detector is limited to base its decision on th e empirical energy of the received signal, 1 n P n i =1 s 2 i , and its empirical correlation with the watermark, 1 n P n i =1 u i s i , then an asympto tically optimum decision strategy , in th e above defined sense, is to co mpare the (Gaussian) empirical mutual information , giv en by: ˆ I us ( U ; S ) = − 1 2 ln " 1 − 1 n P n i =1 u i s i 2 1 n P n i =1 u 2 i 1 n P n i =1 s 2 i # = − 1 2 ln " 1 − 1 n P n i =1 u i s i 2 1 n P n i =1 s 2 i # (5) to λ , or equiv alently , to comp are the ab solute nor malized correlation | ˆ ρ us | = 1 n P n i =1 u i s i q 1 n P n i =1 s 2 i , (6) to √ 1 − e − 2 λ , i.e., the d etection region is the un ion of two hy percon es, aroun d the vectors u and − u , with a spre ad depend ing on λ . This decision rule of thr esholding the emp irical mutual informatio n, or empirical correlation, is intuitively ap pealing since the empirical mu tual in formatio n is an estimate of the degree of statistical dependence between two data vectors. 2 For the present setting , we have to extend th e ana lysis to incorp orate the Gau ssian attack channe l. But this tur ns out t o be staightfo rward, as in the non–watermarked case (pertaining to the false–positive c onstraint), s contin ues to be Gaussian – the only effect of the channel is in ch anging its variance, which is assumed unk nown anyhow . Thus, the s ame detection ru le as above continu es to be asymptotically op timum in our setting as well. Before we pro ceed to the derivation of the op timum em bedder, it is instru ctiv e to lo ok more closely at the depend ence of the detectio n region on the false–po siti ve exponen t λ . As m entioned earlier, the cho ice of λ imposes a th reshold that must be comp ared with (6) in order to provid e the d etector o utput. Th is is equivalent to establishing the limit angle of the detection region, th at we will d enote by β = ar ccos( √ 1 − e − 2 λ ) = a rcsin( e − λ ) ∈ [0 , π / 2] . Letting θ = arccos( ˆ ρ us ) , we then hav e: P f p = Pr { ˆ ρ 2 us > 1 − e − 2 λ | H 0 } = Pr { 0 ≤ θ < β | H 0 } + Pr { π − β < θ ≤ π | H 0 } = 2 Pr { 0 ≤ θ < β | H 0 } = 2 A n ( β ) A n ( π ) . = e n ln(sin β ) , (7) where the notatio n . = stands for equality in th e exponential scale as a fun ction of n , 3 and where A n ( θ ) is the surface area of the n – dimension al spherical cap cut from a unit s phere centered in the origin, by a rig ht circular cone of half angle θ . In (7), we used the fact that in the no n–watermarked case, where s is a zer o–mean Gaussian 2 It is also encountered in the lite rature of uni versal decodi ng t he maximum mutual information (MMI) decod er for unkno wn memoryless channe ls. 3 More precisely , if { a n } and { b n } are two positiv e sequence s, a n · = b n means that l im n →∞ 1 n log a n b n = 0 . Novem ber 13, 2018 DRAFT 7 vector with i.i.d. components, independ ent o f u , the norma lized vector s / k s k is un iformly distributed across the surface of the n – dimension al unit sphere, as th ere are no preferred directions. T he exact expression of A n ( θ ) is giv en by: A n ( θ ) = ( n − 1) π ( n − 1) / 2 Γ n +1 2 θ Z 0 sin ( n − 2) ( ϕ ) dϕ. I V . T H E F A L S E – N E G A T I V E E X P O N E N T In this section, we ma ke th e first step to wards the deriv ation of the o ptimum embedding strategy . In p articular, we compute the f alse–negative er ror e xpon ent as a function of the w atermarkin g displacement sign al w , which is represented by a three–dim ensional vector v = ( v 1 , v 2 , v 3 ) . The vector v is the vector w , n ormalized by √ n , an d transform ed to the coo rdinate system p ertaining to the linear subspace spanned by u , x and w . This result will be used late r to deriv e the optimal embedding fu nction subject to the distortion constraint, th at limits the no rm of w not to exceed nD , which correspond s to the constraint v 2 1 + v 2 2 + v 2 3 ≤ D . T o th is end, we establish the following theorem. Theor em 1: Let P f p , P f n and th eir corresp onding er ror expo nents E f p and E f n , be defined as in eqs. ( 1),(2),(3) and (4), respecti vely . Let v = ( v 1 , v 2 , v 3 ) ∈ I R 3 be given, an d let Λ = { s : ˆ ρ 2 us ≥ 1 − e − 2 λ } . Then , E f n = min q ∈ [ max(0 ,T 1 ( r,α, v )) , ∞ ) min r ∈ [0 , ∞ ) min α ∈ [ − π / 2 ,π / 2] 1 2 q σ 2 Z − ln q σ 2 Z − 1 + 1 2 r σ 2 X − ln r σ 2 X − 1 − ln(cos α ) , (8) where T 1 ( r , α, v ) , ( √ r sin α + v 1 ) 2 1 cos 2 β − 1 − ( √ r co s α + v 2 ) 2 − v 2 3 . Pr o of. For co n venience, let u s apply the Gra m–Schmid t orthogon alization procedur e to the vectors u , x and w , and then select the remaining n − 3 ortho norm al basis function s fo r I R n in an arbitrary manner . After transform ing to the resulting coordin ate system, the above vectors h av e the fo rms u = ( √ n, 0 , 0 , . . . , 0 ) , x = ( x 1 , x 2 , 0 , . . . , 0) , w = ( w 1 , w 2 , w 3 , 0 , . . . , 0) and y = ( x 1 + w 1 , x 2 + w 2 , w 3 , 0 , . . . , 0) , while all the com ponen ts of the noise sequence z will remain, in gen eral, non–n ull. Fr om (6), the false–negati ve event occur s whenever ( x 1 + w 1 + z 1 ) 2 ( x 1 + w 1 + z 1 ) 2 + ( x 2 + w 2 + z 2 ) 2 + ( w 3 + z 3 ) 2 + P n j =4 z 2 j < cos 2 β , Novem ber 13, 2018 DRAFT 8 where w 2 1 + w 2 2 + w 2 3 ≤ nD , x 2 1 = nr sin 2 α an d x 2 2 = nr cos 2 α , with r being given by r , || x || 2 n , and α , a rcsin < x , u > || x ||·|| u || . Eq uiv alently , th e false n egativ e event can be rewritten as: ( x 1 + √ nv 1 + z 1 ) 2 1 cos 2 ( β ) − 1 − ( x 2 + √ nv 2 + z 2 ) 2 − ( √ nv 3 + z 3 ) 2 = ( √ nr sin( α ) + √ nv 1 + z 1 ) 2 1 cos 2 ( β ) − 1 − √ nr co s( α ) + √ nv 2 + z 2 2 − ( √ nv 3 + z 3 ) 2 < n X j =4 z 2 j = ( n − 3) q , where q , 1 n − 3 P n j =4 z 2 j . By defining T 1 , ( √ r sin α + v 1 ) 2 1 cos 2 β − 1 − ( √ r cos α + v 2 ) 2 − v 2 3 , (9) and T 2 , − [ z 2 1 + 2 z 1 ( √ nr s in α + √ nv 1 )] 1 cos 2 β − 1 + z 2 2 + 2 z 2 √ nr cos α + √ nv 2 + z 2 3 + 2 √ nv 3 z 3 , the p resentation of th e false negative ev ent can b e fu rther modified to nT 1 < ( n − 3) q + T 2 , or equ iv alently q > nT 1 n − 3 − T 2 n − 3 . Next, observe that ( n − 3) q σ 2 Z is a χ 2 random variable with n − 3 degrees of freedom, i.e. , f Q ( q ) = n − 3 σ 2 Z 1 2 ( n − 3) / 2 1 Γ ( n − 3 2 ) ( n − 3) q σ 2 Z ( n − 3 2 − 1 ) e − ( n − 3) q 2 σ 2 Z , if q ≥ 0 0 , else where . (10) By the same token, R = || X || 2 n , is also a χ 2 distribution, this time , with n degrees of freedom, and so its d ensity is given by f R ( r ) = n σ 2 X 1 2 n/ 2 1 Γ ( n 2 ) nr σ 2 X ( n 2 − 1 ) e − nr 2 σ 2 X , if r ≥ 0 0 , else where . (11) Defining Ψ = arcsin( < X , u > / k X k ) , we ha ve ( in the absence of a w atemark): P (Ψ ≤ α ) = 1 − A n ( π / 2 − α ) 2 A n ( π / 2) , Novem ber 13, 2018 DRAFT 9 from which it follows th at the pdf of Ψ is f Ψ ( α ) = ∂ P (Ψ ≤ α ) ∂ α = 2Γ n 2 √ π Γ n − 1 2 cos n − 2 α. and so P f n = π / 2 Z α = − π / 2 + ∞ Z r =0 + ∞ Z z 3 = −∞ + ∞ Z z 2 = −∞ + ∞ Z z 1 = −∞ + ∞ Z q =m ax ( 0 , nT 1 n − 3 − T 2 n − 3 ) n − 3 σ 2 Z 1 2 ( n − 3) / 2 1 Γ n − 3 2 ( n − 3) q σ 2 Z ( n − 3 2 − 1 ) e − ( n − 3) q 2 σ 2 Z e − z 2 1 2 σ 2 Z p 2 π σ 2 Z e − z 2 2 2 σ 2 Z p 2 π σ 2 Z e − z 2 3 2 σ 2 Z p 2 π σ 2 Z n σ 2 X 1 2 n/ 2 1 Γ n 2 nr σ 2 X ( n 2 − 1 ) e − nr 2 σ 2 X 2Γ n 2 √ π Γ n − 1 2 cos n − 2 α · dq dz 1 dz 2 dz 3 drdα. Using the f acts that lim n →∞ nT 1 n − 3 − T 2 n − 3 = T 1 and that T 2 grows sublinearly with n , we get lim n →∞ − 1 n ln P f n = − 1 2 − 1 2 − lim n →∞ 1 n ln π / 2 Z α = − π / 2 + ∞ Z r =0 + ∞ Z z 3 = −∞ + ∞ Z z 2 = −∞ + ∞ Z z 1 = −∞ + ∞ Z q =m ax ( 0 ,T 1 ) e − z 2 1 2 σ 2 Z p 2 π σ 2 Z e − z 2 2 2 σ 2 Z p 2 π σ 2 Z e − z 2 3 2 σ 2 Z p 2 π σ 2 Z × e ( n − 3 2 − 1) ln( q σ 2 Z ) e − ( n − 3) q 2 σ 2 Z e ( n 2 − 1 ) ln r σ 2 X e − nr 2 σ 2 X × e ( n − 2) ln(cos α ) dq dz 1 dz 2 dz 3 drdα. where we used the fact that lim n →∞ 1 n ln " (1 / 2) n 2 n n − 2 2 Γ( n/ 2) # = 1 2 . (12) Finally , by using the saddle–poin t meth od [ 20], the expone ntial ra te o f this multi–dimen sional integral is do minated by the poin t at which the integrand is m aximum, and we obta in the result asserted in the theo rem. This co mpletes the p roof of T heorem 1. V . T H E O P T I M U M W A T E R M A R K I N G D I S P L AC E M E N T S I G N A L Having derived E f n as a fun ction of v , we ar e now r eady to derive the main result of this paper , which is th e optimum emb edding functio n, i.e ., th e one tha t max imizes E f n . Theor em 2: The m aximum false–negative exponent, E f n , su bject to the constraint v 2 1 + v 2 2 + v 2 3 ≤ D , is ac hieved by v ∗ = ( v ∗ 1 , v ∗ 2 , v ∗ 3 ) wh ere: v ∗ 1 = ± p D − r co s 4 β , v ∗ 2 = − √ r cos 2 β , v ∗ 3 = 0 . Novem ber 13, 2018 DRAFT 10 Pr o of. Con sider first the dependen ce o f E f n on α . On th e one han d, − ln(cos α ) is min imized when α = 0 . On th e other han d, T 1 also depe nds on α . Since E f n is m onoton ically non– decreasing in T 1 and the distortio n is in sensitiv e to the sign o f any co mpone nt of the watermark, it is seen from eq. (9) that the signs v 1 and v 2 should be such that v 1 sin α ≥ 0 , and v 2 cos α ≤ 0 . Ther efore T 1 ( r , α ) is even in α , an d its minimum is reached at α = 0 . This means that the minimum of (8) is obtained for α = 0 , and then (8) c an be rewritten as lim n →∞ − 1 n ln P f n = min ( q,r ) ∈ [max(0 ,T 1 ( r )) , ∞ ) × [0 , ∞ ) 1 2 q σ 2 Z − ln q σ 2 Z − 1 + 1 2 r σ 2 X − ln r σ 2 X − 1 . (13) As the o bjective f unction is c onv ex in ( r , q ) , an d the glo bal minimum is at ( σ 2 X , σ 2 Z ) , the m inimum in (13) would vanish if ( σ 2 Z , σ 2 X ) ∈ [ma x (0 , T 1 ( r )) , ∞ ) × [0 , ∞ ) . Otherwise, the minim um lies on the b ounda ry , i.e., it is a point of the form ( T 1 ( r ) , r ) , with r ≥ 0 . Consider next the optimization of ( v 1 , v 2 , v 3 ) . Observe tha t the o nly influence o f v on E f n is via T 1 . Thus, v should be chosen so as to m aximize T 1 . Given that α = 0 , T 1 can be written as T 1 = v 2 1 1 cos 2 β − 1 − ( √ r + v 2 ) 2 − v 2 3 , which shou ld be m aximized over v subject to v 2 1 + v 2 2 + v 2 3 ≤ D . Obviously any no n–zero value of v 3 , both decre ases T 1 and reduces the distortion b udge t remaining for v 1 and v 2 . Thus, v ∗ 3 = 0 . Now , T 1 is mono tonically increasing in v 2 1 , so the max imum must be ach iev ed for v 2 1 + v 2 2 = D , which enab les to exp ress T 1 as 4 T 1 = v 2 1 1 cos 2 β − 1 − √ r − q D − v 2 1 2 . Equating dT 1 /dv 1 to zer o and s olving fo r v 1 , we o btain thr ee solutions: v 1 = 0 v 1 = − p D − r cos 4 β v 1 = p D − r co s 4 β . Considering the second derivati ve, it is easy to see that for v ∗ 1 = ± p D − r cos 4 β one obtains maxima of T 1 , yielding v ∗ 2 = − √ r co s 2 β , and a co rrespon ding value of T 1 = D tan 2 β − r sin 2 β . 4 Note that two solutions are possible for v 2 , namely v 2 = ± q D − v 2 1 . H ere we tak e the nega ti ve one, since, as we noted before, v 2 and cosα must have opposite signs and − π / 2 ≤ α ≤ π/ 2 , thus cosα is always positi ve. Novem ber 13, 2018 DRAFT 11 A. Discussion First, obser ve that the watermar king displacemen t sign al w , an d theref ore also the watermarked sequence y , lies in the plane spanned by the watermark u and the host signal x (a similar conclusion was reached in [15] in the attack–free case). This allows to exp ress the optim um watermarking displac ement signal, as well as the waterma rked sequence, as a combination of the h ost sign al and the w atermark, leadin g to the f ollowing r esult: Cor o llary 1: The optimu m watermarked signa l is g iv en by y = a x + b u , where a = 1 − cos 2 β cos α , b = √ r · tan α c os 2 β ± p D − r co s 4 β . Pr o of. From Th eorem 2, we ha ve: y 1 = √ nr s in α ± p n ( D − r cos 4 β ) (14) y 2 = √ nr [cos α − cos 2 β ] . On the other hand , y 2 = a √ nr co s α , and so, we can co nclude tha t a = 1 − cos 2 β cos α . T o fin d b , we use y 1 = a √ nr s in α + b √ n, which when combin ed with (14), gives th e value of b is asserted in Corollary 1. This completes the p roof of Co rollary 1. It sho uld also be pointed out that t he optimum emb edding strategy depen ds neither on σ 2 X nor on σ 2 Z , which is the desirab le requ ired un iv ersality feature . As a consequenc e, the em beddin g strategy is th e same for the attack– free case, stud ied in detail in Section VI. The geometrical interp retation of the emb edding strategy is the following: the embedde r dev otes par t of the allowed distortion budget to scale down the ho st signal, thu s red ucing its interf erence, and then injects the r emaining energy in the direction of the watermar k. In fact, this explains why o nly the c ompon ent of the w atermarked signal in the direction of the waterma rk (i.e., b ) depen ds on D . For illustration, we c ompare the optim um embedding and the sign - embedd er introduced in [1 5]. For the sign embed der, the watermarked signal is given by y se = x + sign ( x t · u ) √ D u , so the watermarking displacem ent signal can b e written as w se = sign ( x t · u ) √ D u . Th e two strategies are c ompared in Fig . 1, where it is easy to see th at the propo sed stra tegy is that of m inimizing the emb edding distortion n ecessary for obtaining a watermarked sign al. It is also interesting to observe that the optimum embedding techniq ue g iv en by Theorem 2, could not be described by [16], as in that case the watermarkin g d isplacement signal direction is just a function of the h ost signal, and it is scaled f or ob taining the desired distortion. Another way to look at Theore m 2 is by evaluating a joint condition o n the emb edding distortion and the false– positive exponent (o r equiv alently on β ) that allows to o btain a false–negati ve error exponen ts: if T 1 ≤ 0 , then the optimization in (13) is perfo rmed on the region [0 , ∞ ) × [0 , ∞ ) , so any pair ( σ 2 Z , σ 2 X ) , e ven with σ 2 Z = 0 , will be in the allowed region, yielding a vanishing err or exponent. The condition that permits to avoid this situation is r ≤ D cos 2 β . W e can reach the s ame result b y considering the case α = 0 , which is th e case that captures most of Novem ber 13, 2018 DRAFT 12 P S f r a g r e p l a c e m e n t s α β x w min opt w min se y min opt y min se y r ob opt y r ob se u Fig. 1. Geometric al interpretati on of the optimum embedding problem, and comparison between the sign-embedder and the optimum embedder . w min opt and w min se denote the minimum norm wate rmarking displace ment signals that produce signals in the detection regio n, for both the optimal embedder and the sign e mbedder , respecti vely . The corresponding watermark ed signals are y min opt and y min se . Furthermore , one can see the wate rmarked signals for the optimal embedder and the sign embedder when part of the embedding distortion can be used to gain som e robustness to noise (denoted by y r ob opt and y r ob se ). probab ility . In this case, the two comp onents of th e watermarked signal y are given by y 1 = ± p n ( D − r co s 4 β ) , y 2 = √ nr (1 − cos 2 β ) , or equiv alently a = 1 − cos 2 β and b = ± p D − r co s 4 β . The refore, when D = r cos 2 β the w atermarked signal is the intersection o f the boundary of the d etection region and th e p erpend icular vector to that bound ary that goes throug h x . On the other ha nd, when D < r cos 2 β , even in th e n oiseless case, one can not ensur e that the embedding distortion co nstraint allo ws to p roduc e a signal in the detection region, so the emb edding fun ction in that case will not be so impo rtant. In fact, regardless of the em beddin g function we ch oose, the false negati ve error exponent would vanish. B. F alse Negative Exponen t of the Op timum Embed der Having solved the optimum embedding problem, we can comp ute th e false–negati ve exponent ach iev ed by the optimum embedder and com pare it to previous results in the literature. T o do so, the optimization in (13) is performed over points of the form ( T 1 ( r ) , r ) = ( D tan 2 β − r sin 2 β , r ) , with 0 ≤ r ≤ D cos 2 β . The d eriv ati ve of ( 13) with Novem ber 13, 2018 DRAFT 13 respect to r tak es the v alue 1 2 − 1 r + 1 σ 2 X + cos 2 β D − r co s 2 β − sin 2 β σ 2 Z , which is piecewise con vex in (0 , D/ co s 2 β ) , and ( D/ cos 2 β , ∞ ) . Due to the con straints intro duced previously , we are interested in the minimum in the interval (0 , D / cos 2 β ) , which is achieved when r ∗ = D σ 2 Z + 2 σ 2 Z σ 2 X cos 2 β − D σ 2 X sin 2 β − q D 2 σ 4 Z + 4 σ 4 Z σ 4 X cos 4 β − 2 D 2 σ 2 Z σ 2 X sin 2 β + D 2 σ 4 X sin 4 β × 2( σ 2 Z cos 2 β − σ 2 X cos 2 β sin 2 β ) − 1 . (15) By rep lacing r with r ∗ in the d efinition o f T 1 ( r ) we get the value of q ∗ , then we insert r ∗ and q ∗ in (1 3), and finally obtain the o ptimum err or expon ent fo r the A WGN case: q ∗ = " 2 D σ 2 Z + q 16 σ 4 Z σ 4 X cos 4 β + D 2 [2 σ 2 Z − σ 2 X (1 − cos(2 β ))] 2 tan 2 β − 2 σ 2 X sin 2 β 2 σ 2 Z + D tan 2 β # 4 σ 2 Z − σ 2 X sin 2 β − 1 , (16) E ∗ f n = 1 2 q ∗ σ 2 Z − ln q ∗ σ 2 Z − 1 + 1 2 r ∗ σ 2 X − ln r ∗ σ 2 X − 1 . (17) Note that due to the cho ice of U and the symm etry of the Gaussian distribution f ollowed by th e host aroun d zero, the false-negative er ror expo nent d oes not d epend on the particular cho ice of the w atermark u . In Figs. 2, 3 a nd 4 the behavior of E ∗ f n is depicted as a function of various p arameters. As expected, the false– negativ e exponent decreases whe n the f alse–positive expo nent λ , the attack variance σ 2 Z , or the host v ariance σ 2 X , increase, while it increases with D . C. Numerica l Results In ord er to validate the theor etical results with n umerical ones, we compar e th e false–negativ e expon ent with the empirical values of − 1 n ln P f n , fo r large n . Althou gh large v alues of n and − 1 n log( P f n ) can n ot be con sidered simultaneou sly , due to the resulting very small probab ility of false negative, in Fig. 5 we can see th e similarity between E ∗ f n and its em pirical appro ximation when n increases, for different values of σ 2 Z . Furthermor e, in Fig. 6 we com pare the emp irical approx imation of the false–n egati ve expone nt to its theoretical value fo r the attack –free case (special attention will be paid to this p articular case in Section VI), for d ifferent values of λ . As expe cted, the larger is λ , the sma ller is the false–negati ve expon ent. Novem ber 13, 2018 DRAFT 14 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.5 1 1.5 2 2.5 3 3.5 4 λ E fn σ Z 2 = 0 σ Z 2 = 0.5 σ Z 2 = 1.0 σ Z 2 = 1.5 Fig. 2. False nega ti ve error expone nt as a functi on of λ , for sev eral powers of A WGN. σ 2 X = 1 and D = 2 . V I . T H E A T TAC K – F R E E C A S E As a special ca se of Theo rem 1 and Theor em 2 , we calculate the false–negative expo nent for the noiseless case ( σ 2 Z = 0 ). By computing the limit of σ 2 Z → 0 in (1 5), it is easy to see that in th e attack–fr ee case, we ha ve: lim σ 2 Z → 0 r ∗ = − 2 D σ 2 X sin 2 β − 2 σ 2 X cos 2 β sin 2 β = D cos 2 β = D 1 − e − 2 λ . (18) T o comp ute lim σ 2 Z → 0 q ∗ σ 2 Z from ( 16) we ca n use L ’H ˆ opital’ s ru le. Given th at lim σ 2 Z → 0 ∂ ∂ σ 2 Z " 2 D σ 2 Z + q 16 σ 4 Z σ 4 X cos 4 β + D 2 [2 σ 2 Z − σ 2 X (1 − cos(2 β ))] 2 tan 2 β − 2 σ 2 X sin 2 β 2 σ 2 Z + D ta n 2 β # = − 4 σ 2 X sin 2 β , and lim σ 2 Z → 0 ∂ ∂ σ 2 Z σ 2 Z 4 σ 2 Z − σ 2 X sin 2 β = − 4 σ 2 X sin 2 β , Novem ber 13, 2018 DRAFT 15 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.5 1 1.5 2 2.5 3 3.5 4 σ Z E fn D e = 0.5 D e = 1.0 D e = 1.5 D e = 2.0 Fig. 3. False nega ti ve error expone nt as a functi on of σ Z , for sev eral embeddin g distortions. σ 2 X = 1 and λ = 0 . 1 . we con clude that lim σ 2 Z → 0 q ∗ σ 2 Z = 1 . (19) From (18) and (19), it is straig htforward to see that the value of the false–negative exp onent for the attack–free case is gi ven by lim σ 2 Z → 0 E ∗ f n = 0 , if D 1 − e − 2 λ ≤ σ 2 X 1 2 h D σ 2 X (1 − e − 2 λ ) − ln D σ 2 X (1 − e − 2 λ ) − 1 i else where . (20) In view of (20), it is inte resting to note that as lo ng a s D > σ 2 X , E ∗ f n > 0 for any λ . In fact, und er th ese co nditions, the asym ptotic value of E f n when λ → ∞ is 1 2 D σ 2 X − ln D σ 2 X − 1 , (21) coinciding with the result of [2 . Corollary 1]. On the oth er hand , when D ≤ σ 2 X another in teresting po int which reflects the goo dness of the pr oposed strategy Novem ber 13, 2018 DRAFT 16 0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.5 1 1.5 2 2.5 3 σ X E fn D e = 0.5 D e = 1.0 D e = 1.5 D e = 2.0 Fig. 4. False nega ti ve error expone nt as a functi on of σ X , for se vera l embedding distortions. σ 2 Z = 1 and λ = 0 . 1 . is the computation of the range of values of λ wher e E f n > 0 can be achie ved. In this case, the co ndition to be verified is D 1 − e − 2 λ > σ 2 X , (22) implying that λ < − 1 2 ln 1 − D σ 2 X = λ 1 , for D ≤ σ 2 X , (23) whereas for the sig n em bedder [15], the v alues of λ for which E f n > 0 ar e tho se such that D σ 2 X > 1 − e − 2 λ e − 2 λ , (24) or , equivalently , λ < − 1 2 ln σ 2 X D + σ 2 X = λ 2 , for all D . (25) Giv en that λ 1 > λ 2 , larger values of fals e positiv e error e xponen ts are allowed (while still keeping E f n > 0 ) by Novem ber 13, 2018 DRAFT 17 10 2 10 3 10 4 10 5 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 n −1/n log(P fn ) −1/n log(P fn ) E fn Fig. 5. Theoretica l f alse negat i ve error exponent and − 1 n log( P f n ) as a funct ion of the number of dimensions n . D = 2 , σ 2 X = 1 and λ = 0 . 6 , and σ 2 Z equal to 0 . 52 , 0 . 53 , 0 . 54 and 0 . 55 , respecti ve ly (from top to bottom). the n ew embedding rule. In Figu re 7 we compare the bounds on the fals e–negative expon ent for the attack –free case found in [15], with its optimal v alue derived here. As can be seen, the improvement owing to the optimum embedd ing strategy is sign ificant, especially for small λ . V I I . C O N C L U S I O N S W e d erived a Neyman– Pearson asym ptotically optimum one–bit watermarking sch eme in the Gaussian setting, when the detecto r is limited to base its decisions on s econd order emp irical statistics only . The s cenario we co nsidered is universal in the sense that the variance of bo th the host signal and the attack are n ot kn own to the embedd er and to the detector . Our main results are s imple closed–form formulas fo r both the optimu m em beddin g fun ction and the corresp onding error exponents. The noiseless scenario can be seen as a special case, where we can co mpare the false–negative expon ent achieved b y the optimum schem e with the bound s deri ved in [15]. Interestingly , the optimum emb edder is very simple thus opening the door to practical implem entations. This work can be extended in many interesting d irections, in cluding non -Gaussian settings, more com plicated attacks, like de-synchron ization attacks [21], [ 22], more detailed empir ical statistics gath red by the detector, and the in troductio n of security consideration s in the picture [23]. Novem ber 13, 2018 DRAFT 18 10 2 10 3 10 4 10 5 0 0.005 0.01 0.015 0.02 0.025 n −1/n log(P fn ) −1/n log(P fn ) E fn Fig. 6. Theoretic al fa lse negat i ve error exponen t and − 1 n log( P f n ) as a functi on of the number of dimensions n . D = 0 . 75 , σ 2 X = 1 and σ 2 Z = 0 , and λ equal to 0 . 58 , 0 . 6 , 0 . 62 and 0 . 64 , respect i vely (from top to bottom). R E F E R E N C E S [1] S. I. Gel’fan d and M. S. Pinsker , “Coding for channel with random parameters, ” Proble ms of Information and Contr ol , vol. 9, no. 1, pp. 19–31, 1980. [2] M. H. M. Costa, “Writing on dirty paper , ” IE EE T ransac tions on Information Theory , vol . 29, no. 3, pp. 439–441, May 1983. [3] I. J. Cox, M. L . Miller , and A. L. McK ell ips, “W atermarking as communicat ions with side informat ion, ” Proc eedings of the IEEE , vol. 87, no. 7, pp. 1127–1141, July 1999. [4] B. Chen and G. W . W ornell, “Quan tizati on inde x modulat ion: A class of pro va bly good m ethods for digit al watermarki ng and informat ion embedding , ” IEEE T ran sactions on Informatio n Theory , vol . 47, no. 4, pp. 1423–1443 , May 2001. [5] M. Ramkumar and A. N. Akansu, “Signali ng m ethods for multimedi a steganograph y , ” IEEE T ransactions on Signal Pro cessing , vol. 52, no. 4, pp. 1100–1111, April 2004. [6] A. Abrardo and M. Barni, “Informed wate rmarking by means of orthogonal and quasi-or thogonal dirty paper coding, ” IEEE T r ansactions on Signal Pr ocessing , vol. 53, no. 2, pp. 824–833, February 2005. [7] F . P ´ erez-Gonz ´ alez, C. Mosquera, M. Barni, and A. Abrardo, “Rat ional dither modulati on: a high-rat e data-hiding method in varia nt to gain attac k, ” IE EE T ransacti ons on Signal Pr ocessing , vol. 53, no. 10, pp. 3960–3975, October 2005. [8] J. R. Hern ´ andez, M. Amado, and F . P ´ erez-Gonz ´ alez, “DCT -domain wate rmarking techniqu es for still images: detector performance analysis and a new structure, ” IEEE T ransact ions on Image Processi ng , vol. 9, no. 1, pp. 55–68, January 2000. [9] M. Barni, F . Bartoli ni, A. De Rosa, and A. Pi va , “ A ne w decoder for the optimum recove ry of non-addit i ve watermarks, ” IEEE Tr ansactio ns on Image Proc essing , vol. 10, no. 5, pp. 755–766, May 2001. Novem ber 13, 2018 DRAFT 19 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.5 1 1.5 2 2.5 3 3.5 4 λ E fn Sign Embedder Improved Present Fig. 7. Compa rison of the errors expone nts obtained by the sign embedder described by Merha v and Sabbag [15], its improv ed version, and the techniqu e presented in this work. σ 2 X = 1 and D = 2 . [10] X. Huang and B. Zhang, “Stat istical ly robust detect ion of multipl icati v e spread-spectrum watermarks, ” IEEE T ransactions on Information F or ensics and Security , vol. 2, no. 1, pp. 1–13, March 2007. [11] M. Noorkami and R. M. Mersereau, “ A framewo rk for robust wate rmarking of H.264-encoded video with controll able detection performanc e, ” IE EE T ransacti ons on Information F orensic s and Security , vol. 2, no. 1, pp. 14–23, March 2007. [12] W . L iu, L. Dong, and W . Zeng, “Optimum detection for spread-spe ctrum watermar king that employs self-masking, ” IE EE T ransac tions on Information F orensic s and Security , vol. 2, no. 4, pp. 645–654, December 2007. [13] M. L. Miller , I. J. Cox, and J. A. Bloom, “Informed embedding: Exploitin g image and detec tor information during wate rmark inserti on, ” in IEEE International Confer ence on Imag e Pr ocessing (ICIP) , vol. 3, V ancouv er , BC, Canada, September 2000, pp. 1–4. [14] T . Liu and P . Moulin, “Error expone nts for one-bit waterma rking, ” i n IEEE International Confer ence on Acoustics, Speech, and Signal Pr ocessing (ICASSP) , vol. 3, Hong Kong , April 2003, pp. 65–68. [15] N. Merha v and E . Sabbag, “Optima l watermark embeddi ng and dete ction strateg ies under limite d detecti on resources, ” IEEE T ransacti ons on Information Theory , vol . 54, no. 1, pp. 255–274, January 2008. [16] T . Furon, “ A constructi ve and unifyi ng frame work for zero-bit wat ermarking, ” IEEE T ransact ions on Information F oren sics and Security , vol. 2, no. 2, pp. 149–163, J une 2007. [17] H. V . Poor , A n Intr oducti on to Signal Detect ion and Estimation , 2nd ed. Springer T e xts in Electri cal Engineering, 1994. [18] T . Furon, B. Macq, N. Hurle y , and G. Silvestre , “J ANIS: Just Another N-order side-Informed watermarking Scheme, ” in IEEE International Confer ence on Imag e P r ocessing , vol. 2, Rochester , NY , USA, September 2002, pp. 153–156. [19] F . P ´ erez-Gonz ´ alez , F . Balado, and J. R. Hern ´ andez, “Performanc e analysis of exist ing and new methods for data hiding with known-host informati on in additi ve channels, ” IEEE T ransac tions on Signal Proce ssing , vol. 51, no. 4, pp. 960–980, April 2003. [20] R. W ong, Asymptotic A ppr oximat ions of Inte gr als . SIAM, 2001. [21] M. Barni, “Effe cti ve ness of exhau sti ve search and templat e matchi ng aga inst wate rmark desynchronizat ion, ” IEEE Signa l P r ocessing Novem ber 13, 2018 DRAFT 20 Letter s , vol. 12, no. 2, pp. 158–161, February 2005. [22] A. D’Ange lo, M. Barni, and N. Merhav , “ Expanding the cl ass of wate rmark desynchro nizatio n at tacks, ” in Proce edings of 9-th ACM Multime dia Security W orkshop , Dallas, T e xas, 20-21 Septembe r 2007. [23] M. Barni, F . Bartolini, a nd T . Furon, “ A general framewo rk fo r robust wat ermarking security , ” Signal Proce ssing , vol. 83, no. 10, pp. 2069–2084, October 2003. Novem ber 13, 2018 DRAFT
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment