Low Complexity Sphere Decoding for Spatial Multiplexing MIMO
In this paper we present a novel method for decoding multiple input - multiple output (MIMO) transmission, which combines sphere decoding (SD) and zero forcing (ZF) techniques to provide near optimal low complexity and high performance constant time …
Authors: Vadim Neder, Doron Ezri, Motti Haridim
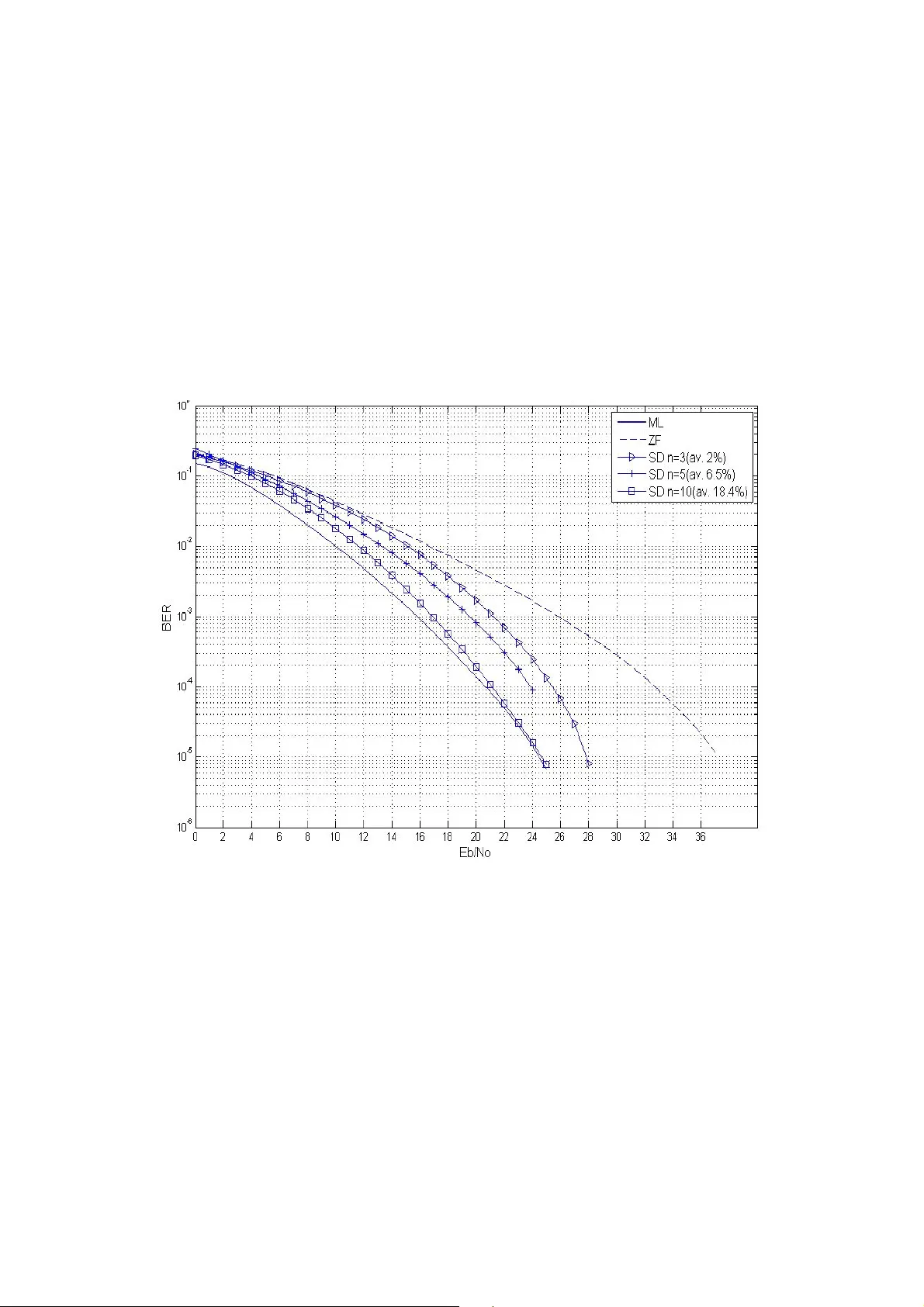
Low Complexi ty Sphere Decoding for Spati al Multiplexing MIMO Vadim Neder, Doron Ezri and Motti Haridim 1. Abstract In this p aper we pr esent a novel method for de coding multiple input - multiple output (M I MO) transmission, which combines sphere decoding (SD) and zero forcing ( ZF) techniques to provide near optimal low complexit y and high pe rformance constant time m odified sphere decoding algorithm. This algorithm was designed especiall y for large num ber of transmit antennas, and allows efficient implementation in hardware . W e do this by limiting the number of overall SD iterations. Moreover, we make sure th at m atrices with high condition number are mor e likel y t o undergo SD. Index Terms — Integer least-squares problem, wireless communications, MIMO systems, data detection, diversity, spatial multiplexing, sphere decoding, zero forcing, maximum-li kelihood. 2. Introduction One of the most p romising M IMO transmission methods is spatial multiplexing (SM). In SM the transmitter e ndowed with M transmit ante nnas, transmi ts M independent information st ream, one from each antenna. In the case of SM, the rec eiver endowed with M N ≥ receive antennas, is to decode the transmi tted information streams. I t is known that the optimal solution to the decoding of SM signals is maximum-likelihood (ML), which involves exhaustive search in multiple dimensions. Sphere dec oding [1 ] is a n iterative method for the computation of the M L esti mator in SM MIMO. However, one o f the severe problems in the implementation of SD lies in t he fact t hat the number of iterations per realization i s neither defined nor bounded. Thus, usuall y , SD methods are not suitable for hardware implementation. ___________________________________ V. Neder and D. Ezri are with Runcom Technologies LTD, {vadimne,dorone}@runcom.co.il. M. Haridim is with the Department of Communication Engineering at Holon I nstitute of Technology, mharidim@hit.ac.il. A few resent results pertaining to fixed complexi ty SD are the followin g. In [6] the K-Best lattice decoder with breadth-first tree search w as presented. This method uses the breadth-first tre e search technique which introduces fix ed throughput. I n this method the best K candidates, which have the smallest overall Euclidian distance, are kept at each search level, therefore a fixed amount of nodes are visit ed each time. Th e dis advantage of this is that its K parameter c annot be defined analytically and it is also very dependant of the channel condition. In [7] the authors prop ose the depth-f irst tree search SD. This is a straightforward way of enforcing a run-time constraint is to terminate t he search, on a symbol vector by s ymbol vector basis, after a maxi mum number o f visit ed nod es. The detector then returns the best solution found so far, i. e., the current ML and counter-hypotheses. This method also, as in [6] can degrade detection performance in case of bad channel condition. In [8] the unconstrained list sphere detector with a s earch method that is bounded independently per search level i s propo sed. The bound is determined based on the distribution of th e candidates found in each search level for the large number of detected sub- carriers. It is shown that the search process cannot be bounded for the first s earch level without a substantial performance loss. This method exploits the main i dea of [7] but with lower upper bound, also it doesn’t provide the constant rate, but onl y bounds it. In [ 9] it is shown that d iversity achievin g scheme may b e devised, b y combination of the low complexit y zero fo rcing (ZF) al gorithm and M L detection. This method i s based of division of the channel matrices int o 2 sets according to the condition number. Matrices with condition number lower than a predefined threshold ar e ZF decoded, while t he others are M L decoded. However, this result does not allow hardware implementation of SD for the ML estimates since again, the number of iterations is not defined. Moreover, thr eshold bas ed technique implies receiver calibration, which should be recalibrated for different channel conditions . 3. Review of Prominent Spatial Multiplexing Decodin g Algorithms The mathematical model for the received vector y in the case of SM is v Hs y ρ + = (1) where H is the channel matrix, s is the transmitted si gnal vector and v ρ vector of independent complex valued Gaussian random v ariables (RV) each with variance 2 ρ . A s chematic of the SM scenario is given in Figure 1. Figure 1: Schem atic representa tion of an SM system. 3.1. Zero Forcin g The linear zero forcing (ZF) computes the least square estimator [3] y H = s ZF + ˆ (2) where + H denotes the left pseudo-inverse of H . The esti mator ZF s ˆ then underg oes standard processing as in the s ingle i nput single output case ( SISO). The complexit y of finding the ZF estimate i s essentiall y determined b y the complexit y of findin g the pseudo-inverse of the matrix y 1 y 2 y N H in (1). For large matrices, the simplest way of calculating the ps eudo-inverse is b y m eans of QR factorization, H = QR . It can also be cal culated in a more stable way (which avoids inverting the upper triangul ar matrix R ) b y means of the singular value d ecomposition (SVD) o f H . The ZF algorithm is not optimal in the case of MIMO, but re mains attractive due to its low implementation complexit y. The problem with the ZF appro ach is evid ent when the channel matrix H is il l conditioned (small determinant), c orresponding to strong correlation between the channels. In this case, the entries of + H in (2) are lar ge. This leads to large noi se at the out put of the ZF estimator. The ZF solutio n provides diversity ord er of 1 + − M N and array gain of M M N 1 + − . 3.2. Maximu m Likeliho od We now address the optimal ML decoder for SM . In this case, the opt imal log likelihood ra tio (LLR) of a bit b in the data-stream s is defined b y { } { } . 0 Pr 1 Pr log y y | = b | = b = LLR(b) (3) Applying Bayes formula we obtain { } { } { } { } { } { } { } { } { } { } . Pr Pr p 0 Pr 0 Pr p 1 Pr 1 Pr 0 Pr 1 Pr 0 : 1 : ∑ ∑ = = ⋅ ⋅ b b | | = = b = b | = b = b | = | = b | = b = LLR(b) s s s y s y y y y y y y (4) Using (1) and (5) we obtain ∑ ∑ − − − − 0 2 2 1 2 2 ρ ρ = b : = b : e e = LLR(b) s Hs y s Hs y (5) which can be rewritten u sing max-log approximation as . 1 ρ ρ log 2 n i m 0 2 n i m 1 2 2 2 0 : min 2 2 1 : min − − − − = − − = − Hs y Hs y Hs y Hs y = b : s = b : s b s b s + ρ = e e = LLR(b) (6) However, this approach quickly be comes i mpractical when the numb er of streams or number of constellation points i s large as it requires exhaustive search. The ML solution provides di versity order of N and array gain of M N . 3.3. Sph ere Decoding SD is an iter ative method that c onverges to the ML when the numbe r of iterations is not bounded. In S D, the mul tidimensional search i mplies b y th e ML crit erion is transformed to multiple searches in one complex dimension. The building block of the optimal LLR is the search for the min imizer of the functional 2 min Hs y s − Γ ∈ (7) over some set of points (2 -dimensional QAM) Γ . Denoting the ZF solution as s ˆ , the cost functional in (7) may be rewritten as ( ) ( ) ( ) s s H H s s = s s H * * 2 − − − ˆ ˆ ˆ (8) Note that since H H * is a posi tive definite symmetric matrix , it can always be decomposed to H H = U U * * where U is an upper triangular matrix wit h real diagonal (this can be done by applying the QR decomp osition on H ). Thus, th e cost functional (8) turns to ( ) ( ) s s U U s s * * − − ˆ ˆ (9) The special structure of U allows writing (9) expli citly, for the 2 × N case, as ( ) | | ( ) 2 2 2 11 12 1 1 2 11 2 2 2 2 22 2 2 1 2 1 2 ˆ ˆ ˆ ˆ ˆ − − − − − ∑ ∑ s s u u + s s u + s s u = s s u u + s s u + =i j j j ii ij i i = i ii (10) We begin wi th searchin g for points s for whi ch the cost functional (10) is smaller than an arbitrary r 2 . Taking onl y the first term in the su m (10) we obt ain a necessary (but not sufficient) for a point s to have a cost smaller than r 2 as | | | | 2 22 2 2 2 2 2 2 2 2 2 22 ˆ ˆ u r < s s r < s s u − ⇒ − (11) which impl ies that a necessar y condition is that s 2 lies within a circle about t he ZF soluti on s ˆ . I f there are no points in the set Γ satisfying (11), the magnitude of r is increased and the algorithm starts all over. In the case t here are points that satisf y the condition , we pea k one of them and use it to produce a similar cond ition on s 1 (for the specific s 2 chosen) through (10) as | | ( ) 2 2 2 2 11 12 1 1 2 11 2 2 2 2 22 ˆ ˆ ˆ r < s s u u + s s u + s s u − − − (12) which implies that s 1 should lie within a circle about ZF that depends on the s 2 chosen. If there are no points s 1 satisfying the condition, we turn to the next point s 2 satisfy ing (11 ), Ot herwise we have a point s with cost smaller than r 2 , d ubbed candidate. We compu te the cost of this point say 2 2 ~ r < r and repeat the algorithm wit h 2 ~ r . Eventually, r 2 wi ll be small enough such that no points with smaller cost ex ist and the minimizer is the candidate of the last iteration. Surel y , if no point s exist for a certain r 2 and no candidates have been found in previous it erations, r 2 should be increased. One of the major proble ms with the SD algorithm is that the number of it erations is not constant and ma y significantl y var y b etween matrices. This makes hard ware imple mentation of SD ver y difficult. When the number of iterations of SD algorithm is not limited, the array gain and diversity order are the sam e as for the ML. 4. The Combined SD Z F Method The propos ed method assumes constant h ardware clock budget for the decoding of the K matrices, each with dimensions M N × . We further assume that the clock budget is larger than that needed for ZF decoding of all matrices. The method is based on several i deas. The first i s t hat matrices with high condition number should be likel y to undergo S D. The s econd is that t he hardware cloc k budget must remain constant for the decoding of K matrices. Note that we do not attempt to construct an SD algorithm with fini te numb er of iterations for each m atrix, but restrict the number of overall iterations for the decoding of multi ple matrices. Following this line of thought, the propos ed method sums up t o the following steps: 1. Compute the linear ZF decoder y H = s + ˆ (13) for each o f the K S M inputs (or matrices). We note an S VD based a pproach i s preferred here since it expedites the calculati on of the condition number. 2. Order the K m atrices a ccording to th e conditio n number, in descending order (lar gest first). This wa y the more problematic matrices in terms of decodin g are first in order. 3. Apply SD t o the matrices according t o the abo ve-mentioned order unt il the hardware clock budget runs out. We note that the SD alg orithm requires the ZF solution alrea dy obtained in the first step, so no waste of clo ck budget is done in the first ste p. Figure 2 shows possible HW imp lementation of the algorithm. SVD k(H) H + ZF + SD + H Y clk counter = clk _ budget ? 1 0 Figure 2: Po ssible HW imp lementation of the a lgorithm. Thus, in the propos ed algorithm, the m atrices with high condition number are first to invoke the SD mechanism, which m eans efficient use of the hardware resou rces. The performance of the proposed algorithm i s low bounded b y that of ZF (in case the clock bud get is i dentical to that required for ZF decod ing), and high boun ded b y the performance of M L (in case th e clock budget is sufficient for SD of all matric es). We conclude with the understanding t hat the per formance of the algorithm in actual scenarios is determined by t he clo ck budget allocated and th e di stribution of the condition num ber of t he channel matrices. 5. Simulation Results Simulation results for the proposed algorithm are given in Figure 3. We de fine the parameter n as ZF TOT n n n = (14) where TOT n - is the number of overall HW clocks, reserved for the decodin g ZF n - is the number of HW clocks, rese rved for ZF decoding The BER curves for ZF and ML are added to the figure for means of compa rison. The figure shows the BER curves correspondin g to the performance of the proposed algorithm with different clock budgets. Obvious ly the BER is smaller as the clock bud get is increased. The most important result of our method we can see in Fig. 2, which shows, that when the matrices are sorted by their conditional nu mber, a small fraction of them undergoin g SD, but still we can get significant enhancement in the performance. Note further that in the case of n =10, where the average of 18% of the matri ces is undergoin g SD, the performance is almost identical to the optimal M L decoder. Figure 3 Sim ulation results o f ML, ZF and proposed SD algorithm s in the Raleigh fa ding environm ent 6. Discussion and Co nclusions In this paper we propos ed a novel constant t ime modified SD algorithm for decoding M IMO transmission, which is upper bounded b y exact M L soluti on, dependi ng of overall number of iterations, reserved for th e decoding. Higher num ber of ov erall iterations c auses the algorithm to be closer to the optimal M L solution. The future wireless communi cation s y stems are more likel y to incorporate a large number of transmit and receive antenna s. IEEE802.16 and WiMax standards are alread y di scussing future user terminals and base stations wit h large number of antennas arrays. This kind of setup altogether with hi gh rate QAM modulations schemes will make t oday’s M IMO ML decodin g algorithms a v ery probl ematic issue for th e future HW i mplementation. The proposed al gorithm allows the emplo y ment of the SD to a small portion of the matrices, allowing the accommodation of large antenna arra ys featuring a large number of spatial streams. 7. References [1] U. Fincke, M. Pohs t, “I mproved methods for c alculating vectors of short length in a lattice, including a complexit y analysis”. Mathematics of C omputation, vol. 44, pp. 463–471, 1985 [2] Foschini, G.J.: “Lay ered space-time architecture for wi reless communication in a fading environment when using m ultiple antennas’, Bell Lab. Tech. J., 1996, 1, (2 ), pp. 41–59 [3] M. Grots chel, L . Lov´asz, A. S chriver, “Geometric Algorithms and Combi natorial Optimization”, S pringer Verlag, 2nd ed., 1993 [4] T. Kailath, H. Vik alo, B . Hassibi, “MIMO Re ceive Algorithms” in Space-Time Wireless Systems: From Arra y Processing to MIMO Com munications, (editors H. Bolcskei, D. Gesbert, C. Papadias, and A. J. van der Veen), Cambrid ge University Press, 2005 [5] Arogyaswami Paulraj, R ohit Nabat, Dhananjay Gore, “Introduction to Space-Tim e Wireless Communications”, Cambridge Univ ersity Press, Cambridge, UK, 2003 [6] Kwan-wai Wong, Chi-Ying Tsui, R. S .-K. Cheng, Wai Ho Mow, “A V LSI architecture of a K-best lattice decoding algorithm for M IMO channels”, ISCAS (3) 2002: 273-276 [7] D. Garrett, L. Davis, S. ten Brink, B. Hochw ald, and G. Knagge, “Silicon complex ity for maximum likelihood MIMO detec tion using sphe rical decoding”, IEEE Journal of Solid-St ate Circuits, vol. 39, pp. 154 4–1552,Sept. 2004. [8] B. M. Hochwald and S . ten Brink, “Achieving near-capacit y on a multiple-antenna channel”, IEEE Trans. Commun., vo l. 51, no. 3, pp. 389{399, Mar. 2003 [9] Maurer, J., Matz, G., and Seethaler, D., “Low complexit y and full diversit y MIMO detection based on condition number thresholdin g”, ICASSP 2007
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment