On the decomposition of k-valued rational relations
We give a new, and hopefully more easily understandable, structural proof of the decomposition of a $k$-valued transducer into $k$ unambiguous functional ones, a result established by A. Weber in 1996. Our construction is based on a lexicographic ord…
Authors: Jacques Sakarovitch (LTCI), Rodrigo De Souza (LTCI)
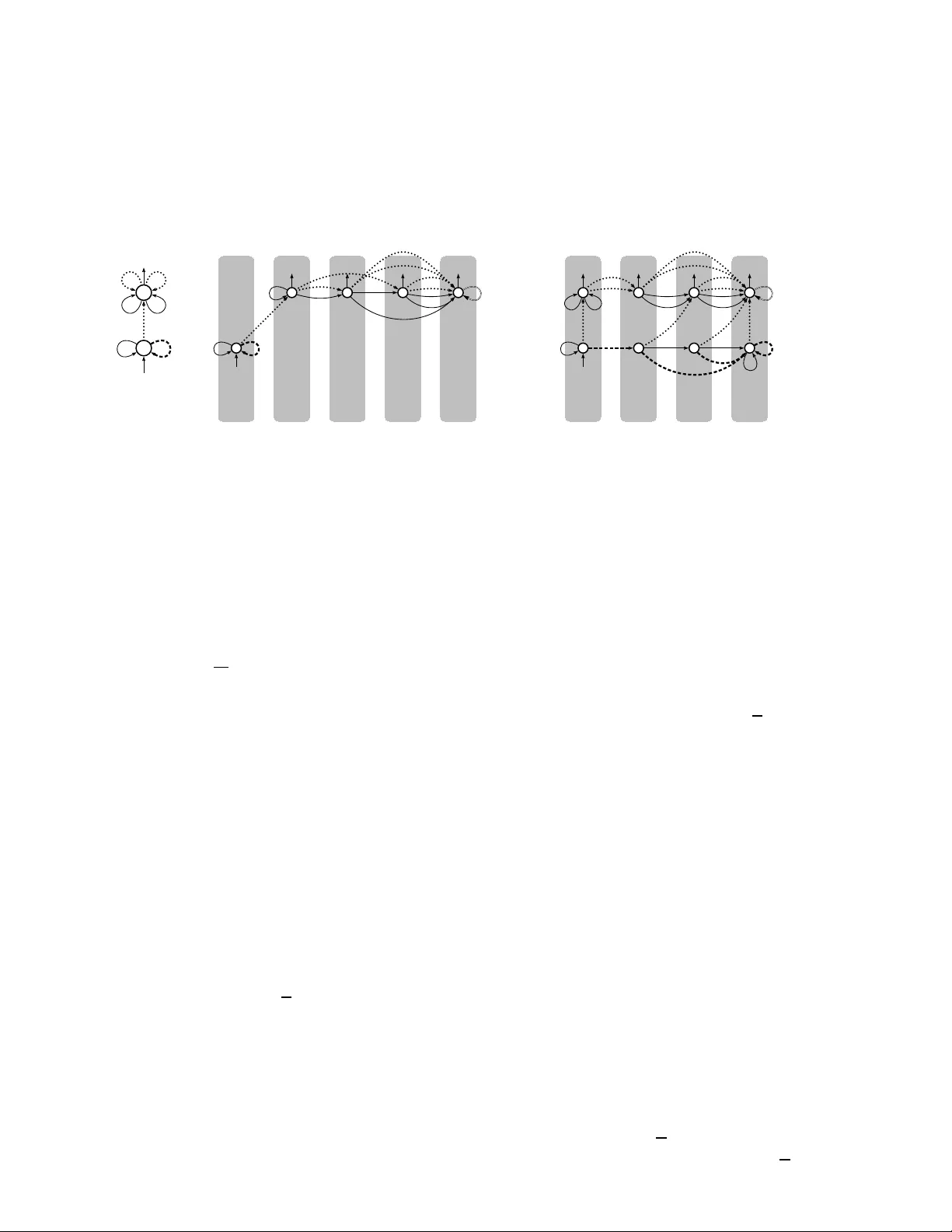
Symposium on Theoretical Aspects of Computer Science 2008 (Bordeaux), pp. 621-632 www .stacs-conf .org ON THE DECO MPOSITION OF k -V ALUED RA TIONAL RELA TIO NS JAC QU ES SAKAROVITCH 1 AND RODRIGO DE SOUZA 2 1 L TCI, ENST/CNRS, Paris (F rance) E-mail addr ess : sakarovitc h@enst.fr 2 ENST, 46, rue Barrault, 75634 Pa ris Cedex 13 (F ra nce) E-mail addr ess : rsouza@ens t.fr Abstra ct. W e giv e a new, and hop efully more easily u n derstandable, structural pro of of the decomp osition of a k - v alued transducer into k unambiguous functional ones, a result established by A. W eber in 1996. Our construction is based on a lexicographic ordering of computations of automata and o n tw o co verings that ca n b e build b y means of this o rdering. The complexity of the construction, measured as the number of states of the transducers inv olved in the decomp osition, impro ves the original one by one exp onential. Moreo ver, this metho d allo ws further generalisation that solves the problem of decomp osition of rational relations with b ounded length - degree, which wa s left op en in W eber’s p ap er. Extended abstract 1. In tro duction This c ommunication is part of a complete rew orking 1 and r ewriting o f the theory of k -v alued rational r elations and transd ucers wh ic h pu ts it in line with the theory of rational functions (1-v alued rational r elatio n s) and fu nctional transdu cers and mak es it app ear as a natural generalisation of the latter n ot only at the lev el of the r esu lts — as we recall in the next paragraph — but also at the level of pr o ofs . It is decidable w hether a transducer is functional (originally d ue to S c h ¨ utzen b er ger [13]); as a consequen ce, the equiv alence of functional transd ucers is decidable, and, ab ov e all, ev- ery f unctional transducer is equiv ale nt to an u nam biguous one [5]. These results generalise in a remark able w a y to b ounded v alued rational r elations and transdu cers. It is decidable whether th e image of every word b y a given trans d ucer is b ound ed (W eb er [14]), it is decid- able whether it is b ound ed by a given integ er k (Gurari and Ib arra [6 ]), ev ery k -v alued tr ans- ducer is equ iv ale nt to the sum of k fu nctional (and thus un am biguous) ones (W eb er [15]) and the equiv alence of k -v alued transducers is decidable (Culik and Karhum¨ aki [4]). It is notew orth y that all the results just quoted for functional transd ucers are no w (if not in the original pap ers) established b y means of constru ctions conducted on the 1998 ACM Subje ct Classific ation: F.1.1, F.4.3. Key wor ds and phr ases: rati onal relation, k -v alued transducer, unambiguous transducer, co vering of automata. 1 A financial su p p ort of CAPES F oundation (Brazilian gov ernment) for do ctoral stu d ies is gratefully ac kn o wledged by the second author (second in the alphab etical order, as in u se in the British and F renc h encyclop edias — n ot in the Lusitanian ones). c Jacques Sakarovitch and Rodr igo de S ou za CC Creative Commons Attribution- NoDer ivs License 622 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA transducers themselve s [2,9,11] whereas the corresp ond ing results on k -v alued transd ucers come, in some sense, “from outsid e” and, what is worse, from a d ifferen t w orld for eac h of them. Gurari an d Ibarra’s pro of for the decidabilit y of the k -v aluedness r elies on a reduction to the emptiness p roblem for a class of counter au tomata, Culik and Karhum¨ aki’s one for the d ecidability of the equiv alence app ears in the con text of the solution of Ehr enfeuc ht’s conjecture on HDTOL languages, and W eb er’s p r o of of the decomp osition — wh ic h we shall discuss more in detail b elow — is highly com binatorial and still somewhat detac hed from the transd ucers. Our app roac h for those results are based on constructions w h ic h depen d directly on the structure of the automata. They giv e bac k the sub ject a full coherence and yield systematically b etter complexit y b ounds. This will b e illustrated in this p ap er with a new pro of of the decomp osition theorem which we restate b elo w as Th eorem 1.1. In [12] we giv e a new p ro of f or the decidabilit y of the k -v aluedness. Theorem 1.1 (W eb er [15]) . Every k -value d tr ansd uc er T c an b e effe ctively de c o mp ose d into a sum of k (unambiguous) functional tr ansduc ers. 2 Our pro of for T heorem 1.1 differs f r om the original one by thr ee asp ects. First, W eb er’s pro of is generally considered as very difficult y to f ollo w, w hereas ours is hop efu lly simpler. Second, W eb er’s construction results in k transd ucers wh ose num b er of states is a double exp onent ial on the num b er of states of T , whereas we obtain a decomp osition of single exp onent ial size. Third a nd finally , our metho d allo ws to solv e the problem, p osed b y W eb er, of th e decomp osition of b oun ded length-degree rational r elations with a more general statemen t (in W eb er’s qu estion, θ is th e length morph ism): Theorem 1.2 . L et τ : A ∗ → B ∗ b e a finite image r ational r elation and θ : B ∗ → C ∗ a morphism such that the c omp o sition τ θ is k - value d. 3 Every tr an sduc er S r e alising τ c an b e effe ctively de c omp ose d into k tr ansduc ers whose c omp o sitions with θ ar e functions. Our p ro of makes us e t wice of the n otion of co v ering of automata. A co v ering of an automaton 4 A is an exp ansion of A : a new automaton B whose states and transitions map to those of A , preserving adjacency and lab els of trans itions. Moreo ver, the outgoing transitions of ev ery state of B map one-to-one to those of the pr o j ection, whic h implies a bijection b et ween the successful computations of A and B . T ypically , B is larger th an A , for sev eral states can ha ve the same image. This allo ws to c ho ose certain subsets of the computations of A b y erasing parts of B . The tw o co v erings we are going to defin e are b ased on a lexicographic ordering on the computations. T h is metho d can b e seen as a conceptual generalisation of th e one u sed by H. Johnson in ord er to build a lexicographic selectio n of deterministic rational relations [7, 8]. The first construction, explained in Section 3.3, is what w e call the lag sep ar ation c overing U N of a (real time) transducer T . It is parameterised by an intege r N , and roughly sp eaking allo ws to distinguish b et wee n computations w ith same input and same output and 2 By “decomp osed” we mean that th e relation realised by T and the union of the relations realised by the k transducers are the same. 3 W e write functions and relations using a p ostfix n otation: xτ is th e image of x by th e relation τ and thus th e composition of relations is written by left-to-right concatenation. Let us recall that t he rational relations are closed under comp osition [5]. 4 As w e shall defi ne in Section 2 , transducers are automata of a certain kind . ON THE DECOM POSITION OF k -V ALUED RA TIONAL RELA TIONS 623 whose lag 5 is b oun ded by N . If T is k -v alued, we sho w that for a certain N , U N con tains a sub tr ansducer V N whic h is equiv alen t to T and input- k -am biguous 6 (Prop osition 4.2). The second constru ction (S ection 3.2) is wh at we call th e multi-skimming c overing of an N -automaton. It p ro ve s the follo wing multi-skimming the or em for N -rational series: Theorem 1.3. L et A b e a finite N -automa ton with n states r e alising the series s . Ther e exists an infinite N -c overing B of A such that f or every inte ger k > 0 , ther e exists a finite N - quotient B k of B which satisfies: B k is an N -c overing of A with at most n ( k + 1) n states; for every i , 0 ≤ i < k , ther e exists an unambiguous sub automato n B ( i ) k of B k which r e c o gnises the supp o rt of s − i ; ther e exists a sub automaton D k of B k whose b ehaviour i s s − k . Here s − k is the series obtained from s by su btracting k to ev ery co efficien t larger than k and assigning 0 to th e others. In particular, Theorem 1.3 sa ys that, if A is a k -am biguous automaton, then there exists a finite co vering B k of A and unambiguous su bautomata B (0) k , . . . , B ( k − 1) k of B k suc h that the succe ssf ul computations of the u nion S i B ( i ) k are in bijection with those of A . Of course, it is not new that s − k is a N -rational series when s is. T his is an old result b y Sch¨ utzen b erger which can b e pro ved by iterated applications of Eilenb er g’s Cross-Section Th eorem [5], or of the constru ction giv en in [11]. But all these metho ds y ield an automaton wh ose size is a to w er of exp onential s of heigh t k . Theorem 1.3 th us answers a problem left op en in [11] with a solution which is b etter than the one that w as conjectured there. These co v erings together giv e in t w o steps a decomp osition of a k -v alued transducer T . First, the lag separation co vering of T yields a transducer V N equiv alen t to T and wh ose underlying in put automaton, sa y A , is k -ambiguous. Next, the m ulti-skimming co ve rin g applied to A yields, as stated in th e d iscussion after Theorem 1.3, k u n am biguous automata B ( i ) k ; the successful computations of the union of the B ( i ) k are in bijection with those of A and, as the transitions of ev ery B ( i ) k map on those of A , one can “lift” on them the outp ut of the corresp ond ing transitions of V N : one thus obtain k unam b iguous functional transdu cers Z (0) , . . . , Z ( k − 1) decomp osing T (see Figure 1). T U N V N A S i B ( i ) k S i Z ( i ) π π Figure 1: Decomp osition of a k -v alued transdu cer T . The sim p le edge stands for a co vering; the dotted one represen ts an inpu t- k -ambiguous subautomaton; the double ones are immersions; π is a pro jection on th e und erlying inp ut automaton. Our p ro of go es so to sp eak in the opp osite w ay that W eb er’s one: our firs t step is to build an inp ut- k -am biguous transducer from which the decomp osition is extracted, w h ereas the existence of suc h a transducer is view ed in [15] as a consequ ence of the d ecomp osition. Moreo v er, although b oth pro ofs hav e a v ery general idea in common — a classificati on of computations from wh ic h at most k successful ones can b e distinguish ed, for ev ery in- put w ord — the wa y we do th is is completely different. Indeed, W eb er’s decomp osition is 5 T o b e defined in the b o dy of the pap er. 6 When it comes to ambiguit y in transducers, w e d istinguish b etw een input-ambiguity (called ambiguit y in most of the references) and ambiguit y of the transducer (which allo ws to defin e ambiguit y for relations). 624 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA extracted from the strongly connected co mp onen ts of a graph built on a preliminary de- comp osition of T in to exp onentia lly many fu nctional transducers. W e p erform a selection among the computations of T according to a lexicographic ordering on the tran s itions. A rough estimation of the complexit y (num b er of states, as a fu nction on the n u m b er of states of T ) of this t wo -step p ro cedure giv es a doub le exp onentia l: one for the lag sep- aration co vering U N and other for the multi-skimming co vering. Ho w eve r, a ma j or feature of this construction is that ev ery computation in the newly b uilt automata corresp ond s to a computation in the original trans d ucer — this is basically what we mean by structur al pro of — wh ich allo ws to trac k down the us efulness of ev ery newly created state. Then, a careful analysis sh o ws that restricting the constructions to the trim parts of the automata the n u m b er of obtained states is b ounded b y 2 O ( hLk 4 n k +4 ) states, where n is the num b er of states of T , h is th e size of the output alphab et and L is the maximal length of the outp uts of the transitions (Section 4.2). This is to b e compared with the size of W eb er’s decomp o- sition describ ed in [15], 2 2 P , wh ere P = p ( n + L + h + k ) is a p olynomial whose degree and co efficien ts do not seem to b e easily d eriv ed fr om the arguments d ev elop ed there. The pro of of Theorem 1.2 starts with the constru ction of k un am biguous tran s ducers decomp osing the k -v alued relatio n τ θ . Next, w e sho w that these t ran s ducers i n duce a decomp osition of th e set of su ccessful compu tations of S . This giv es a new set of k fi nite transducers, n ot n ecessarily un am biguous, whic h decomp ose S (Section 4.3). Finally , let us note that — as explained in [15] — the improv emen t in the size of the decomp osition from double to sin gle exp onen tial yields an improv emen t of the same ord er for the complexity of the d ecision of the equ iv alence of k -v al u ed transd ucers. 2. Preliminaries W e b asically f ollo w the definitions and notation in [1, 5, 10]. The semiring of the nonn egativ e intege rs is denoted by N , the set of words o ver a finite alphab et A (the free monoid ov er A ) b y A ∗ and the e mp t y word b y 1 A ∗ . The length of u ∈ A ∗ is denoted by | u | . The p ow erset of a set X is d enoted b y P ( X ). An automaton o v er a monoid M is a lab elled directed graph A = ( Q, M , E , I , T ) defined b y the set Q of vertic es, called states an d E of edges, called tr ansitions , together with tw o subsets I and T of Q , the initial and fin al states resp ectiv ely . Every transition e in E is asso ciated with a triple ( p, m, q ) of Q × M × Q , sp ecifying its origin, lab el and end. Note that w e shall explicitly consider cases where distinct tr ans itions h av e the same origin, lab el and end, eve n though we tak e the lib erty to w rite e : p m − → q ∈ E meaning a trans ition e asso ciated with ( p, m, q ). The automaton A is finite if Q and E are finite. A c omputation in A is a sequen ce of transitions c : p 0 m 1 − − → p 1 m 2 − − → . . . m l − − → p l , also de- noted as p 0 m 1 ...m l − − − − − → A p l . Its lab el is m 1 . . . m l ∈ M and its length l . It is suc c essful if p 0 ∈ I and p l ∈ T . The b ehaviour of A is the set | | |A | | | ⊆ M of lab els of successful computations. These sets are the family Rat M of the r a tional subsets of M . A state of A is ac c essible if it can b e reac hed by a compu tation starting at some state of I , and c o-ac c essible if some state of T can b e reac hed from it. The state is useful if is b oth accessible and co-accessible, and w e say that A is trim if every state is useful. If M is a free monoid A ∗ and the lab els of transitions are letters, th en A is a classical automaton ov er A ; we write in this case A = ( Q, A, E , I , T ). If M is a p ro duct A ∗ × B ∗ , then ev ery transition is lab elled b y a pair den oted as u | x and consisting of an input word ON THE DECOM POSITION OF k -V ALUED RA TIONAL RELA TIONS 625 u ∈ A ∗ and an output one x ∈ B ∗ ; and A is a tr ansduc er realising a r ational r elation from A ∗ to B ∗ . The image of a word u ∈ A ∗ b y a transducer is the set of outputs o f successful computations whose input is u . The transdu cer is called k -value d , for k ∈ N , if the cardinalit y of the image of eve r y inpu t word is at most k . By u sing classical constructions on automata, ev ery transducer can b e transf orm ed into a r e a l-time one: a transd ucer whose lab els are of form a | K , w here a is a letter , K ∈ Rat B ∗ and I and T are functions from Q to Rat B ∗ [5, 10]. F or finite imag e relations w e ma y supp ose that the transitions read a letter and outpu t a single word, and the image of ev ery final state is 1 B ∗ . In this case, th e transdu cer is denoted rather as T = ( Q, A, B ∗ , E , I , T ). The underlying input automaton A of a real-t ime transducer T is the (classical) au- tomaton obtained by forgetting the outpu t of the transitions and replacing the f u nctions I and T b y their domains. The b ehavio ur of A is the domain of th e relation realised b y T . p q a | b 2 a | 1 B ∗ a | b p q a a a Figure 2: A 2-v alued real-time transducer T o ver { a } ∗ × { b } ∗ and its (infinitely am bigu- ous) un derlying inpu t automaton. T he b ehavio u r of T is th e relation defined by (1 A ∗ ) | | |T | | | = 1 B ∗ and ( a n ) | | |T | | | = { b n , b n +1 } for n > 0. An N -automaton is an automaton lab elled by letters with m ultiplicities in N attac hed to th e transitions and to initial and final states. It realises an N - r atio nal series : a f unction s : A ∗ → N whic h assigns to u ∈ A ∗ a m ultiplicit y gi ven b y summing the multiplicites (pro duct of the m ultiplicities of transitions) of the successful computations lab elled by u . Ev ery N -automaton or r eal-time transducer can b e describ ed by a matrix r epr esentatio n ( λ, µ, ν ), wh ere λ ∈ S Q ( ν ∈ S Q ) is a ro w (column) ve ctor f or the multiplicitie s of the initial (final) states, µ : A ∗ → S Q × Q is a morph ism , S = N f or N -automata and S = Rat B ∗ for transducers. The b eha viour can b e expressed b y the fu n ction which maps ev ery u ∈ A ∗ to λ · uµ · ν . This leads to call dimension the set of states of an automaton. It will b e u seful to consider N -automata whose transitions are char a cteristic , that is, with multiplicit y 1. E very N -automaton can b e transform ed into such a one b y splitting ev ery transition with multiplicit y l > 0 in to a set of l characte ristic ones (Figure 3). p q b a 2 a b 2 b p q b a b a b a b Figure 3: An N -automaton C 1 o v er { a, b } , on the right-hand side with charac teristic tr an s i- tions obtained by sp litting multiplic ities. If u ∈ { a, b } ∗ is viewe d as the wr iting in the binary system of an in teger u by in terpreting a as 0 and b as 1, then u | | |C 1 | | | = u . A morphism fr om B = ( R, M , F , J, U ) to A = ( Q, M , E , I , T ), d enoted by ϕ : B → A , is a pair of mappings R → Q and F → E , b oth d enoted by ϕ , suc h th at J ϕ ⊆ I , U ϕ ⊆ T and for ev ery e ∈ F , if e is asso ciated with ( p, m, q ), then eϕ is asso ciated with ( pϕ, m, q ϕ ). W e sa y that ϕ is a c overing if ϕ induces a b ijection b et wee n the outgoing transitions of p and pϕ , I is in bijection with J and T ϕ − 1 = U . An immersion is by definition a subautomaton of a co v ering. These conditions imply that e very successful computation of B maps to a 626 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA successful computation of A , an d thus | | |B| | | ⊆ | | |A | | | . In the case of co v erings, there is indeed a bijection b etw een the s u ccessful computations and th us | | |B| | | = | | |A | | | [9]. A co vering of the split form of an N -automaton A is the split form of an N -c overing of A , see [3 , 10, 11] for the defin ition of the latter. The N -series realised by an N -automata and any of its N -co v erings are the same. 3. Lexicographic cov erings The idea of the tw o co verings we are going to define is to order lexicographically com- putations of automata, in asm uc h as it can b e done with words on some alphab et. Here, the alphab et is the set of trans itions, and computations are seen as words on it. 3.1. The lexicographic ordering of computations Let A = ( Q, A, E , I , T ) b e a classical automaton. Fix a (partial) ordering ≺ on E such that transitions are comparable iff they ha ve the same lab el and origin. This ordering is ex- tended on E ∗ and thus on the computations of A in suc h a wa y that it can b e called a lexic o- gr ap hic or d ering of the c omputatio ns : c = e 1 e 2 . . . e l e l +1 . . . e n and d = e ′ 1 e ′ 2 . . . e ′ l e ′ l +1 . . . e ′ m ( e i , e ′ j ∈ E for 1 ≤ i ≤ n and 1 ≤ j ≤ m ) are suc h th at c ≺ d iff c and d hav e the same lab el (th us m = n ) and th er e exists l such that e i = e ′ i for 1 ≤ i ≤ l − 1 an d e l ≺ e ′ l . p q b a b a b a b p p p p ≺ ≺ p p p q p p q q ≺ ≺ p q q q p q q q ≺ ≺ p q q q p q q q ≺ p q q q b b b b b b b b b b b b b b b b b b b b b b b b Figure 4: A lexicographic ordering b etw een the compu tations of C 1 lab elled b y bbb a n d starting at p . S olid transitions are smaller than the d otted and dash ed ones. The definitions for other kinds of automata are similar b ut, in ord er to giv e them th e w ante d meaning, a little bit more delicate: for N -automata, the ordering is put on the split form, and for real-time transdu cers, on the un derlying input automaton. 7 3.2. The multi-skimming co v ering of an N -aut omaton The aim of th e multi-skimming cov ering of an N -automaton A = ( Q, A ∗ , E , i, T ) is to coun t, f or ev ery successful compu tation, the num b er of the smaller ones according to ≺ . Let ξ : E → N Q b e the fu nction from transitions to N -v ectors in dexed by Q defined b y ( eξ ) r = card { f ∈ E | f : p a − → r and f ≺ e } , for e : p a − → q ∈ E and r ∈ Q . Definition 3.1. Th e m ulti-skimming co v ering of A is the ( infi nite) N -automat on B of dimension Q × N Q defined as f ollo ws : 7 In order to ease the exp lanation, we shall describ e the constructions for automata with a single initial state. Computations starting at distinct initial states b ecome ordered by extending ≺ to new transitions i 1 − → p starting at a “hidd en” initial state i , for every p ∈ I . Initial multiplicities can b e treated similarly . ON THE DECOM POSITION OF k -V ALUED RA TIONAL RELA TIONS 627 • the initial state is ( i, ~ 0) (where ~ 0 is the zero v ector); • the fin al s tates are T × N Q ; • for ev ery ( p, v ) ∈ Q × N Q and eve ry e : p a − → q ∈ E , ( p, v ) a − → ( q , v · aµ + eξ ) is a transition of B (where µ is the morphism of the matrix rep resen tation of A ). It follo ws from this d efinition that f or ev ery state ( p, v ) of B , th e outgoing transitions of ( p, v ) are in bijection w ith th ose of p . Th u s, th e pro jection ϕ of B on the fir st comp onen t is an N -co ve rin g of A . The prop ert y b elo w follo ws by in d uction on the length of computations 8 : Prop ert y 3.2. Let C : ( i, ~ 0) u − → B ( p, v ) b e a compu tation. F or every q ∈ Q , v q is the num b er of computations d : i u − → A q such that d ≺ C ϕ (where C ϕ is the pro jection of C on A ). W e d efi ne as ab o v e the (finite) automaton B k satisfying T heorem 1.3; the difference is that it counts until k − 1. Let N k = { 0 , . . . , k − 1 , ω } b e the qu otien t semiring of N giv en by the relation k = k + 1 ( ω is the class of k and plays the role of an infin ity). Th e dimension of B k is Q × N Q k ; t r an s itions and initial and final states a re defined as in Definition 3.1, but the matrix op erations v · aµ + eξ are made in N k . The m orp hism N → N k induces an N -quotien t B → B k , and as noted, B k is an N -co v ering of A . Figure 5 sho ws an example. By indu ction on the length of computations, we h a v e: Prop ert y 3.3. Let C : ( i, ~ 0) u − → B k ( p, v ) b e a compu tation. F or every q ∈ Q , v q is the num b er of computations d : i u − → A q su c h that d ≺ C ϕ , if this num b er is smaller than k , or it is ω otherwise. Pr o of of The or e m 1.3. In view of Pr op ert y 3.3, we can obtain the s u bautomata B ( i ) k of B k b y erasing the condition of b eing final of some fi nal states of B k : eac h B ( i ) k is d efined b y c ho osing as fi nal only the states ( p, v ) ∈ T × N Q k suc h that P q ∈ T v q = i ; D k is the s u bautomaton of B k defining as fi n al the states ( p, v ) ∈ T × N Q k suc h that P q ∈ T v q = ω . 3.3. The lag separation co vering of a real-time t ransducer Let T = ( Q, A, B ∗ , E , i, T ) b e a r eal-time transducer. W e aim with the lag separation co v ering of T at a selectio n b etw een computations of this tr an s ducer with same input and same output (stated in Pr op ert y 3.9). This will b e usefu l in S ection 4 to construct a inpu t- k -am biguous transducer fr om a k -v alued one. It is not p ossible in general to build a fi nite expansion wh ic h allo ws to select exactly one computation for eac h p air of words in the relation realised b y the transd ucer, for this w ould lead to an unam b iguous transd ucer and there exist rational relations which are inh er ently am biguous. The idea is to fix a parameter N a n d compare only compu tations such that the differ enc e s of lengths of outputs along them (their “lag”) ar e b ounde d b y N . A t fir s t, let us r ecall the L e a d or Delay action , defined in [2] to describ e differences of w ords. W e restate it in a slightl y differen t form, based on the fr e e gr oup F ( B ) generated by B : the quotien t of ( B ∪ B ) ∗ b y the r elatio n s x x = x x = 1 B ∗ ( x ∈ B ), w here B a disj oin t cop y of B . The inv erse of u ∈ B ∗ , d enoted by u , is the mirror image of u with b arred letters. 8 Computations of coveri ngs will b e represented with capital letters. 628 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA B (0) 3 B (1) 3 B (2) 3 D 3 p q b a b a b a b (0 0) (1 0) (1 1) (1 2) (1 ω ) b a b b a b a b b a b a a a b 2 a + 2 b (a) With t h e dashed transition starting at p b eing smaller than th e d otted one... B (0) 3 B (1) 3 B (2) 3 D 3 (0 0) (0 1) (0 2) (0 ω ) a b a b a b a b b b a a a b b a a b b a b b b b 2 a + 2 b (b) ... and with the other ordering on the outgoing transitions of p . Figure 5: T h e multi-skimming co v ering at la yer k = 3 f or C 1 with t wo d ifferen t orderin gs of the transitions starting at p . States of th e co v ering are p airs ( r , v ), w here r is a state of the automaton (h orizon tal pro jection) and v is an N 3 -v ector ind exed by { p, q } in that order (vertic al pr o jection). Solid trans itions lea ving q are sm aller than the dotted ones in b oth co ve r ings. Th e double tr an s itions stand for four transitions. The automata B ( i ) 3 recognising the su pp ort of s − i and D 3 recognising s − 3 are giv en by kee pin g as final exactly one final state at the in dicated columns . W e d en ote b y 1 the empty w ord of F ( B ) (whic h is the class of the emp ty w ord of B ). Let ∆ = B ∗ ∪ B ∗ ∪ { 0 } , wh ere 0 is a n ew elemen t, a zero, n ot in F ( B ), and ρ : F ( B ) ∪ { 0 } → ∆ b e the fu n ction wρ = w , if w ∈ ∆, and wρ = 0 otherw ise. Definition 3.4. Th e Lead or Dela y Action of B ∗ × B ∗ on ∆ is defined by w · ( x, y ) = ( x w y ) ρ , w ∈ ∆, ( x, y ) ∈ B ∗ × B ∗ (the pro d uct is tak en with the r u les 0 x = x 0 = 0 ). In tuitivel y , 1 · ( x, y ) repr esen ts the “difference” of the wo r d s x and y , b eing a p ositiv e w ord if x is a p r efix of y (the le ad of y with resp ect to x ), a negativ e w ord if y is a p refix of x (the delay of y with r esp ect to x ), and 0 if x and y are not pr efixes of a common word. Definition 3.5. Let c : p u | x − − → q an d d : p ′ u | y − − → q ′ b e t wo computations of T with the same input u . As T is a real-time transducer, c and d hav e the same length. W e define their L e ad or Delay , denoted by LD( c, d ), as the elemen t 1 · ( x, y ) of ∆, and if LD( c, d ) 6 = 0 , their lag as the integ er h c, d i = max {| LD( c ′ , d ′ ) | | c ′ , d ′ prefixes of c, d with the same length } . Similarly to the multi-skimming co v ering, the states of the lag separation co ve rin g of T carry vecto rs indexed b y Q . But in this case th e “stored information” is th e Lead or Dela y b et ween an y computation and those whic h are smaller. Let ξ : E → P (∆) Q b e the function giv en by ( eξ ) r = { ( xy ) ρ | f : p a | y − − → r ∈ E , f ≺ e } , for e : p a | x − − → q ∈ E and r ∈ Q . Definition 3.6. T he lag separatio n co v ering of T is the (infinite) real-t ime transdu cer U = ( R, A, B ∗ , F , j, U ) defin ed by • R = Q × P (∆) Q ; • j = ( i, ~ 0) (wh ere ~ 0 is the v ector whose en tries are all equal to ∅ ); • U = T × R ; • for ev ery ( p, v ) ∈ R and ev ery e : p a | x − − → q ∈ E , ( p, v ) a | x − − → q , ( x · v · aµ + eξ ) ρ is a transition in F (where µ is the morphism of the matrix representa tion of T , x · v ON THE DECOM POSITION OF k -V ALUED RA TIONAL RELA TIONS 629 is the v ector obtained by multiplying on the left eve ry en try of v by x , and ρ is extended comp onent wise to vecto rs in P (∆) Q ). As b efore, for ev ery state ( p, v ) of U , there is a bijection b et wee n the outgoing tr ansitions of ( p, v ) and those of p : the pr o jection ϕ of U on the firs t comp onent is a co v ering on T . By indu ction on the length of computations, we h a v e: Prop ert y 3.7. Let C : ( i, ~ 0) u | x − − → ( p, v ) b e a computation of U . F or every state q of T , v q is the set of Lead or Dela y of C ϕ (the p ro jection of C on T ) and an y computation of T smaller than C ϕ and wh ic h ends in q : v q = { LD( C ϕ, d ) | d : i u | y − − → T q , d ≺ C ϕ } . In ord er to build the ann ounced selection of computations of T , we d efine a “b ound ed” lag separation co v ering where only the computations with lag b oun ded by N are compared, so that only w ords in ∆ N = B ≤ N ∪ B ≤ N are “stored” in the entries of the vec tors v . Let ρ N : F ( B ) → ∆ N ∪ { 0 } b e the fu nction defined by w ρ N = w , if w ∈ ∆ N , and w ρ N = 0 otherwise. The elemen t 0 is in ten tionally omitted from ∆ N in order to simplify th e writing of Pr op ert y 3.8, and in the extension of ρ N to P ( F ( B )) Q the image of a wo rd not in ∆ N will b e seen as th e empt y set so that for v ∈ P ( F ( B )) Q , v ρ N is a v ector in P (∆ N ) Q (whic h do es n ot con tain 0 in any of its entries). W e define U N as the (finite) tran s ducer constru cted as in Defin ition 3.6, but with states and transitions giv en b y: R = Q × P (∆ N ) Q , ∀ ( p, v ) ∈ R, ∀ e : p a | x − − → q ∈ E ( p, v ) a | x − − → q , ( x · v · aµ + eξ ) ρ N ∈ F . Due to the f act that ρ N is not a morp hism, it is not true in general that U is a cov ering of U N ; bu t U N is another co vering of T . B y induction we hav e (see Figure 6(a)): Prop ert y 3.8 . Let C : ( i, ~ 0) u | x − − → ( p, v ) b e a computation of U N . F or ev ery s tate q of T , v q = { LD( C ϕ, d ) | d : i u | y − − → T q , x, y prefixes of a common w ord , d ≺ C ϕ, h C ϕ, d i ≤ N } . The wa nted selection is a consequence of Prop ert y 3.8 and can b e stated as f ollo ws: Prop ert y 3.9 . Let V N b e th e sub tr ansducer of U N obtained b y remo ving the pr op ert y of b eing final of ev ery s tate ( p, v ) ∈ T × R such that 1 ∈ v t for some t ∈ T . A computation C of V N is successful if, and only if, C ϕ is su ccessfu l in T and f or every successful computation d of T smaller than C ϕ w ith (same in put and) same outp u t, h C ϕ, d i > N . The tr ansduc ers T and V N ar e e quivalent : if ( u, x ) is in th e b ehaviour of T , the smallest successful computation of T lab elled b y ( u, x ) is the pr o j ection of a su ccessful one in V N . The follo wing remark on the trim part of V N will b e us efu l for the ev aluation of the size of the d ecomp osition (Section 4.2). Prop ert y 3.10. Let T b e a trim and k -v alued transdu cer with n states, and whose outpu t alphab et has h letters. The num b er of usefu l states of V N is b ounded b y 2 2 hN k 2 n . Pr o of. W e write P ( l ) ( X ) for the set of the subsets with at most l elemen ts of a set X . Clearly , card P ( l ) ( X ) ≤ card ( X ) l 2 . The hyp othesis that T is tr im and k -v alued together with Pr op ert y 3.8 imply that th e vec tors in the useful states of V N ha ve in ev ery co ordin ate at m ost k w ords, th us these states b elong to Q × P ( k ) (∆ N ) Q . The cardinality of th is set is at most n · card (∆ N ) k 2 n ≤ n · (2 h ) N k 2 n . This is clearly b ounded b y 2 2 hN k 2 n . 630 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA 4. Decomp osing a k -v alued rational relation As said in the in tro d u ction, we fir st pro ve a result for k -v alued transducers: Theorem 4.1. Any k - value d tr ansduc er is e quivalent to an i nput- k -ambiguous one. This will b e established by the lag separation co v ering: for so me adequ ate N , V N is input- k -am b iguous (Pr op osition 4.2). Next, T heorem 1.1 is pr o v ed b y applyin g the multi- skimming co ve rin g on the und erlying input automaton of V N (Section 4.2). 4.1. F rom a k -v alued transducer to an input- k -ambiguous one Prop osition 4.2. L et T b e a r e al-time tr ansduc er with n states and lengths of outputs of tr an sitions b ounde d by L . If T is k -v alue d, then for N ≥ L n k +1 V N is input- k -ambiguous. The crux of the p ro of is a combinato r ial prop ert y stated in Theorem 2.2 of [15], and restated here as Lemm a 4.3. In this lemma, T k +1 is the cartesian pro du ct of T b y itself k + 1 times, a natur al generalisation of the squaring of T defined in [2] to establish th e decidabilit y of the fu nctionalit y of transd ucers. In T 2 , eve ry computation corresp onds to a pair of computations of T with the same input ; in T k +1 , ev ery compu tation corresp onds then to a ( k + 1) tuple of computations of T with the same input (this construction is hea vily used in [12] to giv e a new pr o of of the d ecidabilit y of k -v al u ed ness). Lemma 4.3 (W eb er [15]) . If T is k - value d, then for every suc c essful c omputatio n c of T k +1 ther e exists a p air i, j of c o or dinates such that the pr oje ction s c i and c j satisfy LD ( c i , c j ) = 1 (that is, c i and c j have the same output) and h c i , c j i < Ln k +1 . A concise pro of for Lemma 4.3 can b e derive d from a pr op ert y of the Lead or Dela y action stated in Lemma 5 of [2]. Although not so long, it is omitted due to space constraints. Pr o of of Pr op o sition 4.2. Fi x N ≥ Ln k +1 . By Pr op ert y 3.9, distinct successful compu ta- tions of V N with th e same inpu t either o u tput distinct wo r d s or hav e a lag greater than Ln k +1 . He nce k + 1 d istinct successful computations of V N with the same input w ord would pro ject on a ( k + 1)-tuple of computations of T th at con tradicts Lemma 4.3. 4.2. Decomposing the input- k -am biguous t ransducer V N As observ ed in Section 3.3 , T and V N are equiv alen t (for eve ry N ). Th us, a decomp o- sition of V N is also a d ecomp osition of T . T ak e N = Ln k +1 and let A b e the und erlying inpu t automaton of V N . It is straigh t- forw ard to decomp ose V N b y app lying the m ulti-skimming co vering on A . By Prop osi- tion 4.2, A is k -am b iguous, hence the multi -skimmin g cov ering yie lds unam biguous au- tomata B (0) k , . . . , B ( k − 1) k whic h are immersions in A , and whose successful co mp utations are in bijection with those of A . By lifting to the transitions of B (0) k , . . . , B ( k − 1) k the corresp onding outputs in V N of the pro jected ones, w e obtain unam biguous transducers Z (0) , . . . , Z ( k − 1) whose union is equiv alen t to T . Figure 6 shows an example with a giv en ordering for eac h co vering. Other decomp ositions are obtained by v arying these orderings. The num b er of states of the decomp osition dep ends on th e follo wing parameters of T : n (num b er of states), h (cardin alit y of the output alphab et), L (maximal of the lengths of the outpu ts of transitions) and k (v aluedness). W e claim: ON THE DECOM POSITION OF k -V ALUED RA TIONAL RELA TIONS 631 p q a | b 2 a | 1 a | b ( ∅ ∅ ) { ¯ b } ∅ ( { 1 } { b } ) { ¯ b } { 1 } r s a | b 2 a | b a | b a | 1 a | 1 a | b 2 (a) A lag separation co vering U N with N = 1. The P (∆ 1 ) Q -vectors (vertical pro jection) are index ed b y { p, q } , in that order. The dotted transition is larger th an the solid one. The input-2-ambiguous (and equiv alent to T ) subtransd u cer V 1 is reduced to the states { r, s } . Z (0) Z (1) r s a | b a | b 2 (0 0) (1 0) a | b a | b 2 (b) The lifted transdu cers Z (0) and Z (1) from a 2-skimming of th e input automaton of V 1 . The c hoices of final states y ield | | |Z (0) | | | : a n 7→ b n ( n ≥ 0) and | | |Z (1) | | | : a n 7→ b n +1 ( n > 0). Figure 6: A d ecomp osition of the 2-v alued transdu cer T of Figure 2. Prop ert y 4.4. Ea ch transducer Z ( i ) has at most 2 O ( hLk 4 n k +4 ) useful states. The pro of is based on a fi ne analysis of th e useful states of Z ( i ) and go es as follo ws. Let X b e the set of useful stat es of V N (as said in Section 3.3, X ⊆ Q × P ( k ) (∆ N ) Q ). Eac h transducer Z ( i ) is obtained by the multi -skimm in g co v ering of the und erlying inp ut automaton of V N , hence its stat es b elong to X × N X k (assuming that Z ( i ) w as bu ilt on the trim part of V N ). By the stated prop erties of the constructions, we can deriv e that if 9 ( P , V ) is useful in Z ( i ) , then V has at most k n en tries d ifferen t from 0. In other w ord s, the set of co ordinates of V having a nonzero v alue b elongs to P ( kn ) ( X ). There are k p ossible nonzero v alues for eac h suc h co ordinate, namely { 1 , . . . , k − 1 , ω } , th u s the n umb er of usefu l states of Z i is at most card ( X ) · card P ( kn ) ( X ) · k k n . T o conclude, it remains to use the discussion on th e n umber of useful states of V N at the end of Section 3.3: we h a v e that card P ( kn ) ( X ) ≤ ca r d ( X ) ( kn ) 2 , and b y Prop ert y 3.10, ca r d ( X ) ≤ 2 2 hN k 2 n . With N = n k +1 L , w e obtain the b ound of 2 O ( hLk 4 n k +4 ) states. 4.3. The morphic decomp osition theorem W e turn no w to Theorem 1.2, th e pro of of w h ic h go es in four steps. First, we construct a k -v alued transdu cer T realising the comp osition τ θ . This is done by relab elling the tran- sitions of the transd ucer S realising τ : ev ery transition p a | x − − → q of S is r ep laced b y p a | xθ − − → q . Next, T is d ecomp osed in to k u nam biguous transdu cers Z (0) , . . . , Z ( k − 1) . These trans d ucers are immersions in V N and, by comp osition of morp hisms, also in T ; but it may b e the case that n ot ev ery su ccessful computation of T is pro jected by some s uccessful one in the u nion of the Z ( i ) . T he thir d and crucial step (describ ed more precisely b elo w) consists, roughly sp eaking, to stick the successful computations of T to the tran s ducers Z (0) , . . . , Z ( k − 1) in order to obtain equiv alen t (thus functional) transdu cers W (0) , . . . , W ( k − 1) , not n ecessarily unam b iguous, whose successful computations pro ject on th e whole set of su ccessful compu- tations of T . Finally , the transitions of eac h W ( i ) are relab elled in order to construct an 9 Capital letters are used in order to distinguish the states of Z ( i ) from the states of other automata. 632 JACQUES SAK ARO VITCH AND RODRIGO DE SOUZA immersion of S : e : p a | y − − → q in W ( i ) pro jects on a transition f of T ; th e lab el of f is, by construction, of form a | xθ ; the output y o f e is replaced by x . Th is yields k transducers decomp osing S , not necessarily functional, bu t wh ose comp ositions w ith θ are fu n ctional. The defin ition of the transducers W (0) , . . . , W ( k − 1) is based on a generalisation of the prop erty of functional transdu cers that th e lag b et wee n ev ery p air of successful computations with same lab el is b ounded b y some in teger (this app ears imp licitly in a pro of of [2]). Prop ert y 4.5. Let N = n k +1 L and K = 2( k + 1) N . If T is k -v alued, then for ev ery successful compu tation c of T there exists a successful compu tation D in Z (0) ∪ · · · ∪ Z ( k − 1) with same in p ut, same output and suc h th at h c, D ϕ i < K . W e can obtain eac h W ( i ) from the pro du ct of T × Z ( i ) b y the Lead or Dela y action, see [2] for details. The part of th is p ro duct restricted to states ha ving L ead or Dela y in ∆ K pro jects on the successful computations of T with lag smaller than K w ith some s uccessful computation in Z ( i ) . The n umb er of states of W ( i ) is b ounded by n × M × card ( ∆ K ), where M is the num b er of states of Z ( i ). This is again of order 2 O ( hLk 4 n k +4 ) . References [1] J. Berstel. T r ansduct i ons and Context- F r e e La nguages . B. G. T eu bner, 1979. [2] M. - P . B´ eal, O . Carton, C. Prieur, and J. Sak aro v itc h. Squaring transducers: an efficien t pro cedure for deciding functionality and sequentialit y . The or etic al Computer Sci enc e , 292:45–6 3, 2003. [3] M. - P . B´ eal, S . Lombardy , and J. Saka rovitc h. Conjugacy and equiv alence of weigh ted automata and functional transdu cers. In D . Grigoriev, J. H arrison, and E. A. Hirsch, editors, Pr o c. of CSR’06 , volume 3967 of Le ctur e Notes in Computer Scienc e , pages 58–69, 2006. [4] K. Culik and J. Karhum¨ aki. The equiva lence of finite val u ed transdu cers (on HDT0L languages) is decidable. The or etic al Computer Sci enc e , 47(1):71–84 , 1986. [5] S. Eilenberg. Automata, L anguages, and M achines , volume A. Academic Press, 1974. [6] E. Gurari and O. Ibarra. A note on fi nite-v alued and finitely ambiguous transducers. Mathematic al Systems The ory , 16:61–66, 1983. [7] J. H. Johnson. Do rational equiv alence relations have regular cross-sections? In Wilfried Brauer, editor, Pr o c. I CALP’85 , vo lume 194 of L e ctur e Notes in Computer Scienc e , pages 300–309. Springer-V erlag, 1985. [8] J. H. Johnson. Rational equiv alence relations. The or etic al Computer Sci enc e , 47(3):39–60, 1986. [9] J. Saka rovitc h. A constru ction on fi nite automata th at has remained hidden. The or etic al Computer Scienc e , 204(1–2):205– 231, 1998. [10] J. Sak arovitc h. ´ El´ ements de th´ eorie des automates . V uib ert, 2003. English translation: El ements of Aut omata The ory , Cambridge Universit y Press, to app ear. [11] J. Sak arovitc h. The rational skimming th eorem. In Do Long V an and M. Ito, editors, Pr o c. of The Mathematic al F oundations of Inf ormatics (1999) , W orl d Scientific, pages 157–172, 2005. [12] J. Sak arovitc h and R. de Souza. On the d ecidabilit y of fin ite v aluedness of transducers. in p reparation (preliminary version a va ilable at http://www.i nfres.enst.fr/ ∼ rsouza ). [13] M. P . S c h ¨ utzenberger. Su r les relations rationnelles. In H . Barkhage, editor, Automata The ory and F ormal L anguages, 2nd GI Confer enc e , volume 33 of L e ctur e Notes i n Computer Scienc e , pages 209– 213, 1975. [14] A . W eb er. On the va luedn ess of finite transdu cers. A cta Informatic a , 27(8):749–780, 1989. [15] A . W eber. D ecomposing a k -va lued transducer into k un am biguous ones. RAIRO Informatique Th´ eorique et Appli c ations , 30(5):379–413, 1996. This wo rk is license d unde r the Creative Commons Attribution- NoDerivs Licen se. T o view a copy of this license, visit http:/ /creativ e commons.org/licenses/by- nd/3.0/ .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment