Covering Directed Graphs by In-trees
Given a directed graph $D=(V,A)$ with a set of $d$ specified vertices $S=\{s_1,...,s_d\}\subseteq V$ and a function $f\colon S \to \mathbb{Z}_+$ where $\mathbb{Z}_+$ denotes the set of non-negative integers, we consider the problem which asks whether…
Authors: Naoyuki Kamiyama, Naoki Katoh
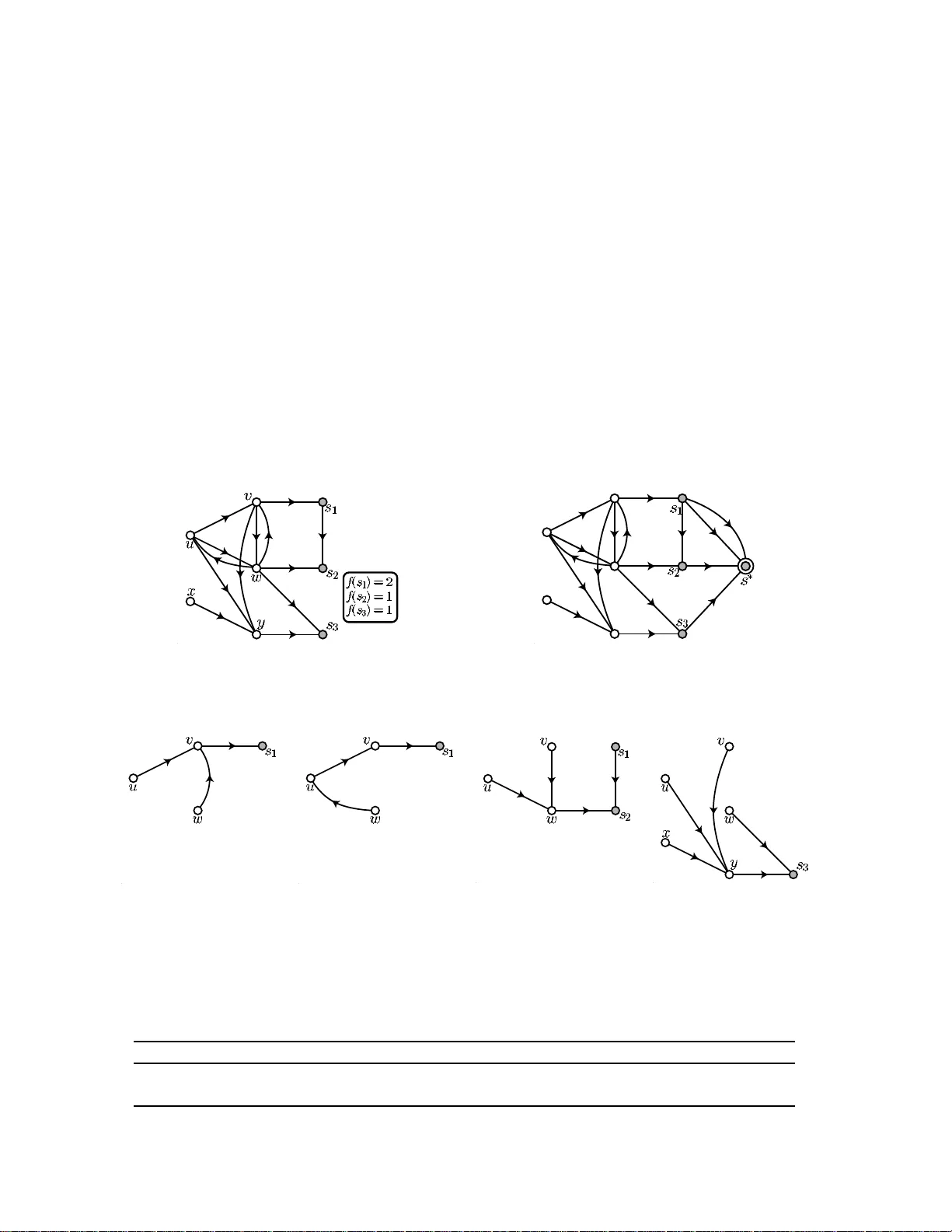
Co v ering Directed Graphs b y In-trees Nao yuki Kamiy ama ∗ Naoki Ka toh † Octob er 25, 2018 Abstract Given a directed graph D = ( V , A ) with a set of d sp ecified vertices S = { s 1 , . . . , s d } ⊆ V and a function f : S → Z + where Z + denotes the set of non-negative in teger s, we consider the problem which asks whether there exist P d i =1 f ( s i ) in-trees denoted by T i, 1 , T i, 2 , . . . , T i,f ( s i ) for every i = 1 , . . . , d such that T i, 1 , . . . , T i,f ( s i ) are ro oted at s i , each T i,j spans vertices from which s i is reachable and the union of all arc sets of T i,j for i = 1 , . . . , d and j = 1 , . . . , f ( s i ) cov ers A . In this pap er, we prov e that such set of in-trees cov ering A can b e found b y using an algorithm for the weight ed ma troid intersection problem in time b o unded by a p olynomial in P d i =1 f ( s i ) and the size of D . F urthermor e , for the case where D is acyclic, we present another c hara cterization of the existence of in-tree s cov ering A , a nd then we prove that in- trees cov ering A c an b e computed more efficiently than the gener al cas e b y finding maximum matchings in a s e ries of bipartite graphs. 1 In tro duction The problem for co v ering a graph b y subgraph s w ith sp ecified prop erties (for example, trees or paths) is v ery im p ortan t from practical and theoretical viewp oints and hav e b een extensiv ely studied. F or example, Nagamo c hi and O k ada [10] stud ied the p roblem f or co ve ring a set of v ertices of a giv en un d irected tree by subtr ees, and Arkin et al. [1] studied the problem for co v ering a set of vertices or edges of a giv en un directed graph b y sub trees or p aths. These results w ere motiv ate d b y v ehicle routing p roblems. Moreo v er, Even et al. [2] s tudied the co v ering p roblem motiv ated b y nurse statio n lo cati on problems. This pap er stud ies th e problem for cov ering a directed graph by ro oted trees w h ic h is mo- tiv a ted b y the follo wing ev ac uation plannin g pr oblem. Giv en a directed graph which mo dels a city , v ertices mo del in tersections and buildin gs, and arcs m od el roads connecting these in- tersections and buildings. P eople exist not only at vertices but also along arcs. Sup p ose we ha v e to give sev eral ev acuation instructions for ev a cuating all p eople to some safet y place. In order to a voi d disorderly confusion, it is desirable that one ev acuatio n instruction giv es a sin gle ev a cuation path for eac h p erson and these paths d o n ot cross eac h other. Th us, we wan t eac h ev a cuation instruction to b ecome an in-tree r ooted at some safet y place. Moreo v er, the n um b er of instructions for eac h safet y place is b ounded in prop ortion to a size of eac h safet y place. ∗ Department of Architecture and Arc hitectural Engineering, Kyoto Universit y , Kyotodaigaku-Katsura, Nishikyo-ku, Kyoto , 615-8540, Japan. E-mail : is.kamiyama@arch i.kyoto-u.ac.jp S upp orted b y JSPS Researc h F ellows hips for Y oung S cientists. † Supp orted by the pro ject New Horizons in Computing , Grant-in-Aid for Scientific Researc h on Priorit y Areas, MEXT Japan. Department of Architecture and Architectural Engineering, Kyoto Universit y , Kyotodaigaku- Katsura, Nishikyo -k u, Kyoto, 615-8540, Japan. E-mail : naoki@a rchi.kyoto-u.ac .jp 1 The ab o v e ev acuation planning problem is f ormulated as the follo wing co v ering pr oblem defined on a directed graph. W e are giv en a directed graph D = ( V , A, S, f ) wh ic h consists of a v ertex set V , an arc set A , a set of d sp ecified vertice s S = { s 1 , . . . , s d } ⊆ V and a fun ctio n f : S → Z + where Z + denotes th e set of n on-negati ve in tege rs. In the ab ov e ev acuation planning problem, S corresp onds to a set of safet y places, and f ( s i ) represents the u pp er b ound of th e n umb er of ev acuatio n instructions f or s i ∈ S . F or eac h i = 1 , . . . , d , we defin e V i D ⊆ V as the set of vertice s in V from whic h s i is reac hable in D , and we define an in-tree rooted at s i whic h spans V i D as a ( D , s i ) -in-tr e e . W e define a s et T of P d i =1 f ( s i ) subgraphs of D as a D -c ano nic al set of in-tr e es if T con tains exactly f ( s i ) ( D , s i )-in-trees for ev ery i = 1 , . . . , d . If ev ery t w o distinct in -trees of a D -canonical set T of in-trees are arc-disjoint , we call T a D -c anonic al set of ar c- disjoint in-tr e es . F urther m ore, if the union of arc sets of all in-trees of a D -canonical set T of in-trees is equal to A , we say that T c overs A . F our in-trees illustrated in Figure 2 comp ose a D -canonical set T of in-trees which cov ers the arc set of a directed graph D = ( V , A, S, f ) illustrated in Figure 1(a) where S = { s 1 , s 2 , s 3 } , f ( s 1 ) = 2, f ( s 2 ) = 1 and f ( s 3 ) = 1. Ho wev er, T is not a D -canonical set of arc-disj oint in-trees. (a) (b) Figure 1: (a) Directed gra ph D . (b) T ransformed graph D ∗ . (a) (b) (c) (d) Figure 2: (a) ( D, s 1 )-in-tree. (b) ( D , s 1 )-in-tree. (c) ( D , s 2 )-in-tree. (d) ( D , s 3 )-in-tree. W e will study the p roblem f or c overing dir e cte d gr aphs by in-tr e es (in short CDGI), and w e will present c haracterizations for a directed graph D = ( V , A, S, f ) for which th er e exists a feasible solution of C DGI( D ), and a p olynomial time algo rithm for CDGI( D ). Problem : CDGI( D ) Input : a directed graph D ; Output : a D -canonical set of in-trees wh ic h co v ers the arc set of D , if one exists. A sp ecial class of the problem CDGI( D ) in whic h S consists of a single v ertex w as considered b y Vidy asank ar [13]. He sho w ed th e necessary and sufficient condition in terms of linear inequ aliti es 2 that there exists a feasible s olution of this p roblem (a w eak er v ersion w as shown b y F rank [4]). Ho w ev er, to the b est of our kn o wledge, an algorithm for CDGI( D ) wa s not present ed. W e will summerize our r esu lts as follo w s. 1. W e first sh o w that CDGI( D ) can b e view ed as some t yp e of the conn ecti vit y augmen ta- tion problem. After this, we will prov e that this connectivit y augmenta tion problem can b e solv ed by us in g an algorithm for the w eigh ted matroid in tersection p roblem in time b ounded by a p olynomial in P d i =1 f ( s i ) and the size of D (this generalizes the result by F rank [3]). 2. F or the case wher e D is acyclic , we sho w another c haracterization f or D that there exists a feasible solution of CDGI ( D ). M oreo ve r, w e pro ve that in this case CDGI( D ) can b e solv ed more efficien tly than the general case by fin ding maxim um matc hings in a series of bipartite graphs instead of usin g an algorithm for the weigh ted matroid in tersection problem. 1.1 Outline The rest of this pap er is organized as follo ws. Section 2 giv es necessary definitions and fund a- men tal results. In Section 3, we giv e an algorithm f or the problem CDGI b y using an algorithm for the wei ghte d matroid int ersection problem. In Section 4, we consider the acyclic case. 2 Preliminaries Let D = ( V , A, S, f ) b e a connected directed graph whic h m a y h a v e m ultiple arcs. Let S = { s 1 , . . . , s d } . Since we can alw a ys co v er by | A | ( D , s i )-in-trees the arc set of the subgraph of D induced b y V i D , w e consider the pr oblem b y using at most | A | ( D , s i )-in-trees. That is, without loss of generalit y , w e assume that f ( s i ) ≤ | A | . F or B ⊆ A , let ∂ − ( B ) (resp. ∂ + ( B )) b e a set of tails (resp. h eads) of arcs in B . F or e ∈ A , we write ∂ − ( e ) and ∂ + ( e ) instead of ∂ − ( { e } ) and ∂ + ( { e } ), resp ectiv ely . F or W ⊆ V , w e define δ D ( W ) = { e ∈ A : ∂ − ( e ) ∈ W, ∂ + ( e ) / ∈ W } . F or v ∈ V , we write δ D ( v ) instead of δ D ( { v } ). F or t w o distinct v ertices u, v ∈ D , w e denote b y λ ( u, v ; D ) the lo cal arc connectivit y from u to v in D , i.e., λ ( u, v ; D ) = min {| δ D ( W ) | : u ∈ W , v / ∈ W , W ⊆ V } . W e call a su bgraph T of D for e st if T has no cycle wh en we ignore th e d irectio n of arcs in T . If a forest T is connected, we call T tr e e . If every arc of an arc set B is parallel to some arc in A , we sa y that B is p ar al lel to A . W e denote a directed graph obtained b y adding an arc set B to A by D + B , i.e., D + B = ( V , A ∪ B , S, f ). F or S ′ ⊆ S , let f ( S ′ ) = P s i ∈ S ′ f ( s i ). F or v ∈ V , w e denote b y R D ( v ) a set of vertices in S whic h are reac hable from v in D . F or W ⊆ V , let R D ( W ) = S v ∈ W R D ( v ). F or an arc set B whic h is parallel to A , we cle arly h a v e for every v ∈ V R D ( v ) = R D + B ( v ) . (1) F rom (1), w e hav e for ev ery i = 1 , . . . , d V i D = V i D + B . (2) W e define D ∗ as a directed graph obtained from D b y addin g a new v ertex s ∗ and connecting s i to s ∗ with f ( s i ) parallel arcs f or ev ery i = 1 , . . . , d (see Figure 1). W e denote b y A ∗ the arc set of D ∗ . F rom the definition of D ∗ , | A ∗ | = P v ∈ V | δ D ∗ ( v ) | = | A | + f ( S ) . (3) 3 W e sa y that D is ( S, f ) -pr op er when | δ D ∗ ( v ) | ≤ f ( R D ( v )) holds for every v ∈ V . 2.1 Ro oted arc-connectivit y augmen tation by reinforcing arcs Giv en a directed graph D = ( V , A, S, f ), w e call an arc set B with A ∩ B = ∅ whic h is parallel to A a D ∗ -r o ote d c onne ctor if λ ( v , s ∗ ; D ∗ + B ) ≥ f ( R D ( v )) holds for ev ery v ∈ V . Notice that since a D ∗ -ro oted connector B is parallel to A , B do es n ot cont ain an arc which is p arallel to an arc en tering into s ∗ in D ∗ . Then, the problem r o ote d ar c-c onne ctivity augmentation by r einfor cing ar cs (in short RAA-RA) is formally defined as follo ws. Problem : RAA-RA( D ∗ ) Input : D ∗ of a directed graph D ; Output : a D ∗ -ro oted connector B whose size is m inim um among all D ∗ -ro oted connectors. Notice that the problem RAA-RA( D ∗ ) is n ot equiv alen t to th e lo cal arc-connectivit y aug- men tation problem with m in im um num b er of reinforcing arcs fr om v ∈ V to s i ∈ R D ( v ). F or example, w e consider D ∗ illustrated in Figure 3(a) of a directed graph D = ( V , A, S, f ) where S = { s 1 , s 2 } , f ( s 1 ) = 2 and f ( s 2 ) = 2. The broken lines in Figure 3(b) represent a minimum D ∗ -ro oted connector. F or the pr ob lem that asks to increase the v - s i lo cal arc-connectivit y for ev ery v ∈ V and s i ∈ R D ( v ) to f ( s i ) by addin g min im um parallel arcs to A (this problem is called the problem incr e a sing ar c-c o nne ctivity by r e infor cing ar cs in [7], in short IARA( D ∗ )), an optimal solution is a set of br ok en lines in Figure 3(c). While it is kn o wn [7] that IARA( D ∗ ) is N P -hard, it is known [3] that RAA-RA( D ∗ ) in whic h S consists of a single element can b e solv ed in time b ounded b y a p olynomial in f ( S ) and the size of D b y usin g an algorithm for the w eigh ted matroid in tersection. (a) (b) (c) Figure 3: (a) Input. (b) Optimal solutio n for RAA-RA. (c) O ptimal solution for IARA. 2.2 Matroids on arc sets of directed graphs In this sub section, we define t w o matroids M ( D ∗ ) and U ( D ∗ ) on A ∗ for a directed graph D = ( V , A, S, f ), whic h will b e used in the sub sequen t discussion. W e denote by M = ( E , I ) a matroid on E whose coll ection of ind ep enden t sets is I . Introd uctory treatmen t of a matroid is giv en in [11 ]. F or i = 1 , . . . , d and j = 1 , . . . , f ( s i ), we d efine M i,j ( D ∗ ) = ( A ∗ , I i,j ( D ∗ )) where I ⊆ A ∗ b elongs to I i,j ( D ∗ ) if and only if b oth of a tail and a head of ev ery arc in I are con tained in V i D ∪{ s ∗ } and a directed graph ( V i D ∪{ s ∗ } , I ) is a forest. M i,j ( D ∗ ) is clearly a matroid (i.e. grap h ic matroid). Moreo v er, we d enote th e union of M i,j ( D ∗ ) for i = 1 , . . . , d and j = 1 , . . . , f ( s i ) by M ( D ∗ ) = ( A ∗ , I ( D ∗ )) in whic h I ⊆ A ∗ b elongs to I ( D ∗ ) if and only if I can b e partitioned into { I i, 1 , . . . , I i,f ( s i ) : i = 1 , . . . , d } suc h that eac h I i,j b elongs to I i,j ( D ∗ ). M ( D ∗ ) is also a matroid (see Chapter 12.3 in [11]. This m atroid is also called matr oid sum ). When I ∈ I ( D ∗ ) can b e partitioned into { I i, 1 , . . . , I i,f ( s i ) : i = 1 , . . . , d } such that a dir ecte d graph ( V i D ∪ { s ∗ } , I i,j ) is a tree for ev ery i = 1 , . . . , d and j = 1 , . . . , f ( s i ), w e call I a b ase of M ( D ∗ ). 4 Next we define another matroid. W e define U ( D ∗ ) = ( A ∗ , J ( D ∗ )) where I ⊆ A ∗ b elongs to J ( D ∗ ) if and only if I satisfies | δ D ∗ ( v ) ∩ I | ≤ f ( R D ( v )) , if v ∈ V , 0 , if v = s ∗ . (4) Since U ( D ∗ ) is a d irect su m of un iform matroids, U ( D ∗ ) is also a matroid (see Exercise 7 of pp.16 and Example 1.2.7 in [11]). W e call I ∈ J ( D ∗ ) a b ase of U ( D ) wh en (4) holds with equalit y . F or t w o m atroids M ( D ∗ ) and U ( D ∗ ), we call an arc set I ⊆ A ∗ D ∗ -interse ction wh en I ∈ I ( D ∗ ) ∩ J ( D ∗ ). If a D ∗ -in tersection I is a base of b oth M ( D ∗ ) and U ( D ∗ ), we call I c om plete . When w e are giv en a w eigh t fu nction w : A ∗ → R + where R + denotes the set of n on-negati ve reals, we define the w eigh t of I ⊆ A ∗ (denoted by w ( I )) b y the sum of weig hts of all arcs I . The weighte d matr oid interse ction pr oblem (in short WMI) is then defined as follo ws [5 ]. Problem : WMI( D ∗ ) Input : D ∗ of a directed graph D and a weigh t function w : A ∗ → R + ; Output : a complete D ∗ -in tersection I whose w eigh is minimum among all complete D ∗ -in tersections, if one exists. Lemma 2.1 We c a n solve WMI ( D ∗ ) in O ( M | A ∗ | 6 ) time wher e M = P v ∈ V f ( R D ( v )) . Pr o of. T o p ro v e the lemma, we use the follo wing theorem concernin g a matroid. Theorem 2.2 ([9]) Given a matr oid M = ( E , I ) which is a union of t ( ≤ | E | ) matr oids M 1 = ( E , I 1 ) , . . . , M t = ( E , I t ) , we c an test if a given set b elongs to I in O ( | E | 3 γ ) time wher e γ is the time r e quir e d to test if a given set b elongs to I 1 , . . . , I t . Theorem 2.3 ([5]) Given two matr oids M 1 = ( E , I 1 ) and M 2 = ( E , I 2 ) with a weight function w : E → R + and a non-ne gative inte ger k ∈ Z + , we c an find I ∈ I 1 ∩ I 2 with | I | = k whose weight is minimum among al l I ′ ∈ I 1 ∩ I 2 with | I ′ | = k in O ( k | E | 3 + k | E | 2 γ ) time if one exists wher e γ is the time r e quir e d to test if a given set b elo ngs to b oth I 1 and I 2 . W e consider the time required to test if a giv en set b elongs to b oth I ( D ∗ ) and J ( D ∗ ). Since it is not difficult to see that w e can test is a giv en set b elongs to eac h I i,j ( D ∗ ) in O ( | A ∗ | ) time, w e can test if a giv en set b elongs to I ( D ∗ ) in O ( | A ∗ | 4 ) time fr om Th eorem 2.2. F or J ( D ∗ ), the time complexit y is clearly O ( | A ∗ | ) time. The s ize of every complete D ∗ -in tersection is equal to M from (4). F rom this d iscussion, the total time r equired for s olving WMI( D ∗ ) is O ( M | A ∗ | 6 ) from Theorem 2.3. 2.3 Results from [8] In this section, we introdu ce results concerning pac king of in-trees giv en by Kamiy ama et al. [8] whic h plays a crucial role in this pap er. Theorem 2.4 ([8]) Given a dir e cte d gr aph D = ( V , A, S, f ) , the fol lowing thr e e statements ar e e quivalent : 1. F or every v ∈ V , λ ( v , s ∗ ; D ∗ ) ≥ f ( R D ( v )) holds. 5 2. Ther e exists a D -c anonic a l set of ar c-disjoint in-tr e es. 3. Ther e exists a c omplete D ∗ -interse ction. Although the follo wing theorem is not explicitly pro v ed in [8], we can easily obtain it from the pro of of Theorem 2.4 in [8]. Theorem 2.5 ([8]) Given a dir e cte d gr a ph D = ( V , A, S, f ) which satisfies the c o ndition of The o r em 2.4, we c an find a D -c anonic al set of ar c- disjoint in-tr e es in O ( M 2 | A | 2 ) time wher e M = P v ∈ V f ( R D ( v )) . F rom Theorem 2.4, we obtain the follo wing corollary . Corollary 2.6 Given a dir e cte d gr aph D = ( V , A, S, f ) and an ar c set B with A ∩ B = ∅ which is p a r al lel to A , the fol lowing thr e e statements ar e e quivalent : 1. B is a D ∗ -r o ote d c onne ctor. 2. Ther e exists a ( D + B ) -c anonic al set of ar c - disjoint in-tr e es. 3. Ther e exists a c omplete ( D + B ) ∗ -interse ction. Pr o of. The equiv a lence of th e statemen ts 2 and 3 follo ws from Theorem 2.4. 1 → 2 : Since B is parallel to A , we cle arly ha v e ( D + B ) ∗ = D ∗ + B . (5) Since B is a D ∗ -ro oted connector, w e hav e for ev ery v ∈ V λ ( v , s ∗ ; ( D + B ) ∗ ) = λ ( v, s ∗ ; D ∗ + B ) | {z } by (5) ≥ f ( R D ( v )) = f ( R D + B ( v )) | {z } b y (1) . F rom this inequalit y and Theorem 2.4, this part follo ws. 2 → 1 : Since there exists a ( D + B )-canonica l set of arc-disjoin t in-trees, w e ha v e for ev ery v ∈ V λ ( v , s ∗ ; D ∗ + B ) = λ ( v , s ∗ ; ( D + B ) ∗ ) | {z } by (5) ≥ f ( R D + B ( v )) | {z } by Theorem 2.4 = f ( R D ( v )) | {z } by (1) . This prov es that B is a D ∗ -ro oted connector. 3 An Algorithm for Co v ering by In-trees Giv en a d irected graph D = ( V , A, S, f ), we p resen t in this section an algorithm for CDGI( D ). The time complexit y of the prop osed algorithm is b ou n ded b y a p olynomial in f ( S ) and the size of D . W e fir st pro ve that CDGI( D ) can b e reduced to RAA-RA( D ∗ ). After th is, we show that RAA-RA( D ∗ ) can b e solve d by using an algorithm for the weig hted matroid intersect ion problem. 6 3.1 Reduction from CDGI to RAA-RA If D = ( V , A, S, f ) is not ( S, f )-prop er, i.e., | δ D ∗ ( v ) | > f ( R D ( v )) f or some v ∈ V , there exists no feasible solution of CDGI( D ) since there can not b e a D -canonical set of in-trees that co v ers δ D ∗ ( v ) from the definition of a D -canonical set of in-trees. Thus, w e assu me in the su b sequen t discussion that D is ( S, f )-prop er. Prop osition 3.1 Give n an ( S, f ) -pr op er dir e cte d gr ap h D = ( V , A, S, f ) , the size of a D ∗ -r o ote d c onne ctor is at le ast P v ∈ V f ( R D ( v )) − ( | A | + f ( S )) . Pr o of. Let B b e a D ∗ -ro oted connector. F or eve ry v ∈ V , | δ D ∗ + B ( v ) | ≥ f ( R D ( v )) h olds from the defi n ition of a D ∗ -ro oted conn ecto r. Thus, the num b er of arcs of D ∗ + B is at least P v ∈ V f ( R D ( v )). Sin ce the n umber of arcs of D ∗ is equal to | A | + f ( S ) from (3), the p rop osition holds. F or an ( S, f )-prop er directed graph D = ( V , A, S, f ), w e defin e opt D b y opt D = P v ∈ V f ( R D ( v )) − ( | A | + f ( S )) . (6) F rom Prop osition 3.1, the size of a D ∗ -ro oted connector is at least opt D . Lemma 3.2 Given an ( S, f ) -pr op er dir e cte d gr a ph D = ( V , A, S, f ) , ther e exists a fe asible so- lution of CDGI ( D ) if and only if ther e exists a D ∗ -r o ote d c onne ctor whose size is e qual to opt D . Pr o of. O nly if-part : Sup p ose there exists a feasible solution of CDGI( D ), i.e., there exists a D -canonical set T of in-trees whic h co v ers A . F or eac h i = 1 , . . . , d , we denote f ( s i ) ( D , s i )-in- trees of T by T i, 1 , . . . , T i,f ( s i ) . F or eac h e ∈ A , let P e = { ( i, j ) : e is con tained in T i,j } . S ince T co v ers A , eac h e ∈ A is con tained in at least one in-tree of T . Thus, | P e | ≥ 1 holds for ev ery e ∈ A . W e define an arc s et B b y B = S e ∈ A {| P e | − 1 copies of e } . W e will pr o v e that B is a D ∗ -ro oted connector whose size is equal to opt D . W e first pro v e | B | = opt D . F or this, we sho w that for every v ∈ V P e ∈ δ D ( v ) ( | P e | − 1) = f ( R D ( v )) − | δ D ∗ ( v ) | . (7) Let u s fi rst consider v / ∈ S . F or s i ∈ R D ( v ), T i,j con tains v since T i,j spans V i D and s i is reac hable from v . Hence, since T i,j is an in-tree and v is n ot a r o ot of T i,j from v / ∈ S , T i,j con tains exactly one arc e ∈ δ D ( v ), i.e., ( i, j ) is con tained in P e for exactly one arc e ∈ δ D ( v ). Th us, P e ∈ δ D ( v ) | P e | = P s i ∈ R D ( v ) f ( s i ) = f ( R D ( v )). F rom this equation and since | δ D ( v ) | = | δ D ∗ ( v ) | follo ws from v / ∈ S , (7) holds . I n the case of v ∈ S , for s i ∈ R D ( v ) \ { v } , ( i, j ) is cont ained in P e for exactly one arc e ∈ δ D ( v ) as in the case of v / ∈ S . Th us, P e ∈ δ D ( v ) | P e | = f ( R D ( v )) − f ( v ). F rom this equation and | δ D ∗ ( v ) | = | δ D ( v ) | + f ( v ), P e ∈ δ D ( v ) ( | P e | − 1) = f ( R D ( v )) − f ( v ) − | δ D ( v ) | = f ( R D ( v )) − | δ D ∗ ( v ) | . This completes the p r oof of (7). Since B con tains | P e | − 1 copies of e ∈ A , | B | = P v ∈ V P e ∈ δ D ( v ) ( | P e | − 1) = P v ∈ V ( f ( R D ( v )) − | δ D ∗ ( v ) | ) (from (7)) = opt D (from (3) and (6)) . What remains is to pro ve that B is a D ∗ -ro oted connector. F rom Corolla ry 2.6, it is sufficien t to pr o v e that there exists a ( D + B )-canonical set of arc-disj oint in-trees. F or th is, w e will 7 construct fr om T a set T ′ of arc-disjoint in-trees which consists of T ′ i, 1 , . . . , T ′ i,f ( s i ) for i = 1 , . . . , d , and we pro v e that T ′ is a ( D + B )-canonical set of in-trees. Eac h T ′ i,j is constructed from T i,j as follo ws. When e ∈ A is con tained in more than one in-tree of T , in ord er to construct T ′ from T , we need to r eplace e of T i,j b y an arc in B which is parallel to e for every ( i, j ) ∈ P e except one in-tree. F or ( i min , j min ) ∈ P e whic h is lexicographically s mallest in P e , we allo w T ′ i min ,j min to use e , w hile for ( i, j ) ∈ P e \ ( i min , j min ), w e replace e of T i,j b y an arc in B whic h is parallel to e so that for d istinct ( i, j ) , ( i ′ , j ′ ) ∈ P e \ ( i min , j min ), the resu lting T ′ i,j and T ′ i ′ ,j ′ con tain d istinct arcs which are p arallel to e , resp ectiv ely (see Figure 4). Figure 4: Illustra tion of the r eplacing op eration. Let e be an arc in A , and let e ′ , e ′′ be arcs in B . Assume that P e = { (1 , 1) , (1 , 2) , (2 , 1) } . In this cas e, T 1 , 1 , T 1 , 2 and T 2 , 1 contain e . Then, T ′ 1 , 1 contains e , T ′ 1 , 2 contains e ′ , and T ′ 2 , 1 contains e ′′ . W e will do th is op eration for ev ery e ∈ A . Let T ′ b e the set of in-trees obtained by p erform in g the ab ov e op eration for every e ∈ A . Here w e sho w that T ′ is a ( D + B )-canonical set of arc-disjoin t in-trees. Since T ′ i,j and T ′ i ′ ,j ′ are arc-disjoin t for ( i, j ) 6 = ( i ′ , j ′ ) f r om the w a y of constructing T ′ , it is sufficient to pro v e that T ′ i,j is a ( D + B , s i )-in-tree. Sin ce T ′ i,j is co nstru cted b y replacing arcs of T i,j b y the corresp onding parallel arc in B and T i,j is an in-tree ro oted at s i , T ′ i,j is also an in-tree r ooted at s i . Sin ce T i,j spans V i D and from (2), T ′ i,j spans V i D + B . Hence, T ′ i,j is a ( D + B , s i )-in-tree. This completes the pro of. If-part : Let B b e a D ∗ -ro oted conn ecto r with | B | = opt D . F r om Corollary 2.6, there exists a ( D + B )-canonical set T ′ of arc-disjoin t in-trees. F or eac h i = 1 , . . . , d , w e denote f ( s i ) ( D + B , s i )-in-trees of T ′ b y T ′ i, 1 , . . . , T ′ i,f ( s i ) . W e will p ro v e that we can construct f r om T ′ a D -canonical set of in-trees co v ering A . W e first constru ct from T ′ a set T of in-trees whic h consists of T i,j for i = 1 , . . . , d and j = 1 , . . . , f ( s i ) by the follo wing pr ocedu r e Repla ce . Pro cedure Repl ace : F or eac h i = 1 , . . . , d and j = 1 , . . . , f ( s i ), set T i,j to b e a d irected graph obtai ned from T ′ i,j b y replacing ev ery arc e ∈ B which is conta ined in T ′ i,j b y an arc in A which is parallel to e . F rom no w on, we pr ov e that T is a D -canonical set of in-trees wh ic h co ve rs A . It is not difficult to prov e that T is a D -canonical set of in-trees from the defi n ition of th e p rocedu re Replace in the same manner as the last part of th e pro of of the “only if-part”. Thus, it is sufficien t to pro ve that T co v ers A . F or this, we first sh ow that T ′ co v ers A ∪ B . F rom A ∩ B = ∅ , | B | = opt D and (6), | A ∪ B | = | A | + opt D = P v ∈ V f ( R D ( v )) − f ( S ) . (8) Recall that eac h v ∈ V is con tained in f ( R D + B ( v )) in-trees of T ′ from the definition of a ( D + B )-ca nonical set of in-trees. Th us, since in-trees of T ′ are arc-disjoint, it h olds for eac h v ∈ V that the num b er of arcs in δ D + B ( v ) whic h are contai ned in in-trees of T ′ is equal to f ( R D + B ( v )) , if v ∈ V \ S , f ( R D + B ( v )) − f ( v ) , if v ∈ S. (9) 8 Hence, the num b er of arcs in A ∪ B conta ined in in-trees of T ′ is equal to P v ∈ V \ S f ( R D + B ( v )) + P v ∈ S ( f ( R D + B ( v )) − f ( v )) = P v ∈ V f ( R D + B ( v )) − f ( S ) = P v ∈ V f ( R D ( v )) − f ( S ) (from (1)) . (10) Since any arc of T ′ is in A ∪ B and the num b er of arcs in A ∪ B is equ al to that of T ′ from (8) and (10), T ′ con tains all arcs in A . Th us, T co v ers A from the definition of the pro cedure Replace . As seen in the p r oof of th e “if-part” of Lemma 3.2, if we can find a D ∗ -ro oted connector B w ith | B | = opt D , we can compute a D -canonical s et of in-trees whic h co v ers A by using the pro cedure Replace fr om a ( D + B )-canonical set of arc-disjoin t in-trees. F urth ermore, we can construct a ( D + B )-canonical set of arc-disjoint in-trees b y using the algorithm of Theorem 2.5. Since th e optimal v alue of RAA-RA( D ∗ ) is at least opt D from Prop osition 3.1 , w e can test if there exists a D ∗ -ro oted connector wh ose size is equal to opt D b y solving RAA-RA( D ∗ ). Assuming that we can solv e RAA-RA ( D ∗ ), our algorithm for fi nding a D -canonical set of in-trees w h ic h co v ers A calle d Algorithm CR can b e illustrate d as Algorithm 1 b elo w. Algorithm 1 Algorithm CR Input: a directed graph D = ( V , A, S, f ) Output: a D -canonical set of in-trees co v ering A , if one exists 1: if D is not ( S, f )-pr op er then 2: Halt (there exists no D -canonical set of in -trees co v ering A ) 3: end if 4: Find an optimal solution B of RAA-RA( D ∗ ) 5: if | B | > opt D then 6: Halt (there exists no D -canonical set of in -trees co v ering A ) 7: else 8: Cons truct a ( D + B )-canonical set T ′ of arc-disjoin t in -trees 9: Cons truct a set T of in -trees from T ′ b y using the pr ocedu r e Replace 10: return T 11: end if Lemma 3.3 Given a dir e cte d g r aph D = ( V , A, f , S ) , Algorithm CR c orr e ctly finds a D - c anonic al set of i n-tr e es which c overs A i n O ( γ 1 + | V || A | + M 4 ) time i f one exists wher e γ 1 is the time r e quir e d to solve RAA-RA ( D ∗ ) and M = P v ∈ V f ( R ( v )) . Pr o of. The correctness of the algorithm follo ws f rom Lemma 3.2. Thus, we consider the time complexit y . In Step 1, w e ha ve to compu te R D ( v ) for ev ery v ∈ V . This can b e done in O ( | V || A | ) time b y applying depth-first searc h from ev ery s i ∈ S . After this, the time requir ed to test whether | δ D ∗ ( v ) | ≤ f ( R D ( v )) for all v ∈ V is O ( | A | ). Th us, the time required for Step 1 is O ( | V || A | ). Since the num b er of arcs of D + B is at most M for a D ∗ -ro oted conn ector B with | B | = opt D from (6), the time required for Step 8 is O ( M 4 ) from Theorem 2.5. Moreo v er, since the num b er of arcs of D + B is at most M , the time required f or Step 9 is O ( M ) from the defin ition of Pro cedure Replace . Hence, since th e time requir ed for Step 4 is γ 1 , the lemma follo ws. 9 3.2 Reduction from RAA-R A to WMI F rom th e algorithm CR in Section 3.1, in order to p resen t an algorithm for CDGI ( D ), what remains is to sho w ho w w e solv e RAA-RA( D ∗ ). In this sectio n, we will pro v e that we can test whether there exists a D ∗ -ro oted co nn ecto r w hose size is equ al to opt D (i.e., Steps 4 and 5 in the algorithm CR ) by reducing it to the pr oblem WMI. Our pro of is based on the algorithm of [3] for RAA-RA( D ∗ ) in whic h S consists of a single v ertex. W e extend the idea of [3 ] to the case of | S | > 1 by using Theorem 2.4. W e define a directed grap h D + obtained fr om D by adding opt D parallel arcs to ev ery e ∈ A . Then , w e will compute a D ∗ -ro oted connector whose size is equal to opt D b y using an algorithm for WMI ( D ∗ + ) as d escrib ed b elo w. Sin ce the n umb er of arcs in a D ∗ -ro oted connector whose size is equal to opt D whic h are parallel to one arc in A is at most opt D , it is enough to add opt D parallel arcs to eac h arc of A in D + in order to find a D ∗ -ro oted connector whose size is equal to opt D . W e d enote by A + and A ∗ + the arc sets of D + and D ∗ + , resp ectiv ely . If I ⊆ A ∗ + is a complete D ∗ + -in tersection, since I is a base of U ( D ∗ + ) and from (4) and (1), | I | = P v ∈ V f ( R D + ( v )) = P v ∈ V f ( R D ( v )) . (11) W e define a w eigh t function w : A ∗ + → R + b y w ( e ) = 0 , if e ∈ A ∗ , 1 , otherwise . (12) The follo wing lemma sho ws the relation b etw een RAA-RA( D ∗ ) and WMI( D ∗ + ). Lemma 3.4 Given an ( S, f ) -pr op er dir e cte d gr ap h D = ( V , A, S, f ) , ther e exists a D ∗ -r o ote d c onne ctor whose si ze is e qual to opt D if and only if ther e exists a c omplete D ∗ + -interse ction whose weight is e qual to opt D . T o pro v e Lemma 3.4, w e need to show the follo wing t wo lemmas. Lemma 3.5 Given a dir e cte d gr ap h D = ( V , A, S, f ) and an ar c set B which is p ar al lel to A , 1. if ther e is a c omplete D ∗ -interse ction I , I is also a c omplete ( D + B ) ∗ -interse ction, and 2. if ther e is a c omplete ( D + B ) ∗ -interse ction I such tha t I ⊆ A ∗ , I is also a c omplete D ∗ -interse ction. Pr o of. 1 : W e first p ro v e that I is a base of M (( D + B ) ∗ ). Sin ce I is a base of M ( D ∗ ), I can b e partitioned int o { I i, 1 , . . . , I i,f ( s i ) : i = 1 , . . . , d } such th at a directed graph ( V i D ∪ { s ∗ } , I i,j ) is a tree f or ev ery i = 1 , . . . , d and j = 1 , . . . , f ( s i ). T h us, since eac h ( V i D + B ∪ { s ∗ } , I i,j ) is a tree from (2), I is a base of M (( D + B ) ∗ ). Next w e p ro v e that I is a base of U (( D + B ) ∗ ). Sin ce I is a base of U ( D ∗ ), | δ D ∗ ( v ) ∩ I | is equal to f ( R D ( v )) , if v ∈ V , 0 , if v = s ∗ . F ur thermore, since I ∩ B = ∅ follo ws from I ⊆ A ∗ , | δ D ∗ ( v ) ∩ I | is equal to | δ ( D + B ) ∗ ( v ) ∩ I | f or ev ery v ∈ V . Thus, for eac h v ∈ V , | δ ( D + B ) ∗ ( v ) ∩ I | is equal to f ( R D ( v )) = f ( R D + B ( v )) , if v ∈ V , 0 , if v = s ∗ . (13) 10 This prov es that I is a base of U (( D + B ) ∗ ). 2 : This part can b e pro v ed in the same manner as in th e pro of of the part 1. Lemma 3.6 Given D ∗ + of an ( S, f ) - pr op er dir e cte d gr aph D = ( V , A, S, f ) and a weight function w : A ∗ + → R + define d by (12), if ther e exists a c omplete D ∗ + -interse ction I ⊆ A ∗ + , w ( I ) ≥ opt D . Mor e over, w ( I ) = opt D if and only if A ∗ ⊆ I . Pr o of. F rom (12), we ha v e w ( I ) = | I | − | I ∩ A ∗ | . F ur thermore, | I | − | I ∩ A ∗ | ≥ | I | − | A ∗ | = P v ∈ V f ( R D ( v )) − ( | A | + f ( S )) | {z } from (3) and (11) . Th us, w ( I ) ≥ opt D follo ws from (6). F rom the ab ov e equation, w ( I ) = opt D if and only if | I ∩ A ∗ | = | A ∗ | . This p r o v es the rest of the lemma. Pr o of of L emma 3.4. Only if-pa rt : Assum e that th ere exists a D ∗ -ro oted conn ector wh ose size is equal to opt D . Since D + has opt D parallel arcs to ev ery e ∈ A , there exists a D ∗ -ro oted connector B ⊆ A + \ A with | B | = opt D . Let u s fi x a D ∗ -ro oted connector B ⊆ A + \ A with | B | = opt D . F rom (i) of Lemma 3.5, in order to pro v e the “only if-part”, it is sufficient to pro ve that there exists a complete ( D + B ) ∗ -in tersection I with w ( I ) = opt D . Since there exists a complete ( D + B ) ∗ -in tersection I from Corollary 2.6 , we will pro ve that w ( I ) = opt D . Since the arc set of ( D + B ) ∗ is equal to A ∗ ∪ B and I is a ( D + B ) ∗ -in tersection, I ⊆ A ∗ ∪ B holds. Th us, since w ( A ∗ ∪ B ) = | B | = opt D follo ws fr om (12), w ( I ) ≤ w ( A ∗ ∪ B ) = opt D holds. Hence, w ( I ) = opt D follo ws f r om Lemma 3.6. This completes the pro of. If-part : Assume that there exists a complete D ∗ + -in tersection I with w ( I ) = opt D . Let B b e I \ A ∗ , and we will prov e that B is a D ∗ -ro oted connector with | B | = opt D . W e first p ro v e B is a D ∗ -ro oted conn ector b y u sing (ii) of L emm a 3.5 and Corollary 2.6. W e set B and D in Lemma 3.5 to b e A + \ ( A ∪ B ) and D + B , resp ectiv ely . Notice that ( D + B ) + ( A + \ ( A ∪ B )) = D + follo ws f rom B ⊆ A + and A + \ ( A ∪ B ) is parallel to A ∪ B . F rom B = I \ A ∗ , we hav e I ⊆ A ∗ ∪ B . Th us, I is a complete ( D + B ) ∗ -in tersection since I is a complete D ∗ + -in tersection and from (ii) of Lemma 3.5. Hence, fr om Corolla ry 2.6, B is a D ∗ -ro oted connector. What remains is to pro v e that | B | = opt D . F rom Lemm a 3.6 and w ( I ) = opt D , A ∗ ⊆ I holds. Thus, from B = I \ A ∗ and (11), | B | = | I \ A ∗ | = | I | − | A ∗ | = P v ∈ V f ( R D ( v )) − ( | A | + f ( S )) . This equation and (6) complete the pro of. As seen in the p ro of of the “if-part” of Lemma 3.4, if w e can find a complete D ∗ + -in tersection I with w ( I ) = opt D , we can find a D ∗ -ro oted connector B with | B | = opt D b y setting B = I \ A ∗ . F ur thermore, we can obtain a complete D ∗ + -in tersection whose we ight is equal to opt D if one exists by u s ing the al gorithm for WM I ( D ∗ + ) sin ce the optimal v alue of WMI( D ∗ + ) is at least opt D from Lemma 3.6 . The formal description of the algorithm called Algorithm RW for find ing a D ∗ -ro oted connector whose size is equal to opt D is illustrated in Algorithm 2. Lemma 3.7 Given D ∗ of an ( S, f ) -pr op er dir e cte d gr aph D = ( V , A, f , S ) , Algorithm RW c or- r e ctly finds a D ∗ -r o ote d c onne ctor whose size is e qual to opt D in O ( γ 2 + M | A | ) time if one exists wher e γ 2 is the time r e quir e d to solve WMI ( D ∗ + ) and M = P v ∈ V f ( R D ( v )) . 11 Algorithm 2 Algorithm RW Input: D ∗ of an ( S, f )-prop er directed graph D = ( V , A, S, f ) Output: a D ∗ -ro oted connecto r whose size is equ al to opt D , if one exits 1: Find an optimal solution I for WMI( D ∗ + ) with a w eigh t function w defined by (1 2 ) 2: if there exists n o solution of WMI( D ∗ + ) or w ( I ) > opt D then 3: Halt (There exists no D ∗ -ro oted connector whose size is equal to opt D ) 4: end if 5: return I \ A ∗ Pr o of. Th e correctness of the algorithm follo ws from Lemma 3.4. W e consider the time com- plexit y . In Step 1, w e can construct D ∗ + in O ( M | A | ) time since D ∗ + has opt D arcs parallel to eac h arc in A and fr om (6). Hence, since the time required for S tep 2 is equal to γ 2 , the lemma holds. 3.3 Algorithm for CDGI W e are ready to explain the formal description of our algorithm called Algorithm Covering for CDGI( D ). Algorithm Covering is the same as Algorithm CR such that Steps 4, 5 and 6 are replaced by Algorithm RW . Theorem 3.8 Given a dir e cte d gr aph D = ( V , A, S, f ) , Al gorithm Covering c orr e ctly finds a D -c ano nic al set of in-tr e es which c overs A in O ( M 7 | A | 6 ) time if one exits wher e M = P v ∈ V f ( R D ( v )) . Pr o of. Th e co rrectness of the algo rithm follo ws from Lemmas 3.3 and 3.7. W e then consider the time complexit y of this algorithm. F rom Lemmas 3.3 and 3.7, what remains is to analyze th e time required to solve WMI( D ∗ + ). If D is ( S, f )-prop er, | A ∗ | = P v ∈ V | δ D ∗ ( v ) | ≤ P v ∈ V f ( R D ( v )) = M . Th us, s in ce D ∗ + has opt D parallel arcs of ev ery e ∈ A , | A ∗ + | = | A ∗ | + P e ∈ A opt D ≤ M + M | A | . Hence w e ha v e | A ∗ + | = O ( M | A | ). Thus, fr om Lemma 2.1, w e can solv e WMI( D ∗ ) in O ( M 7 | A | 6 ) time. F r om this discuss ion and Lemmas 3.3 and 3.7, w e obtain the theorem. 4 Acyclic Case In this section, we sho w that in the case wh ere D = ( V , A, S, f ) is acyclic, a D -canonical set of in-trees co v ering A can b e computed more efficiently th an the general case. F or this, we pr o v e the follo wing theorem. Theorem 4.1 Given an acyclic dir e cte d gr ap h D = ( V , A, S, f ) , ther e exi sts a D -c ano nic al set of in-tr e es which c overs A if and only if | B | ≤ f ( R D ( ∂ + ( B ))) f or every v ∈ V and B ⊆ δ D ( v ) . (14) Pr o of. F or eac h v ∈ V , we d efine an undir ecte d bipartite graph G v = ( X v ∪ Y v , E v ) wh ic h is necessary to pro ve the theorem. Let X v = { x e : e ∈ δ D ( v ) } and Y v = { y i,j : s i ∈ R D ( v ) , j = 1 , . . . , f ( s i ) } . x e ∈ X v and y i,j ∈ Y v are connected b y an edge in E v if and only if s i is reac hable from ∂ + ( e ) (see Figure 5). 12 (a) (b) Figure 5: (a) Input acyclic dir ected graph D . (b) Bipar tite graph G u for u in (a). It is w ell-kno wn that (14) is equiv alen t to the necessary and sufficient condition that for an y v ∈ V , there exists a matc hing in G v whic h saturates v ertices in X v (e.g., Theorem 16.7 in Chapter 16 of [12 ]). Thus it is sufficient to pro ve that there exists a D -canonical s et of in-trees whic h co v ers A if and only if for any v ∈ V , there exists a matc hing in G v whic h saturates v ertices in X v . If-part : Since D has no cycle, we can label v ertices in V as follo ws, based on top olog ical ordering : (i) A lab el of eac h v ertex is an integ er b et wee n 1 and | V | . (ii) F or an y e ∈ A , a lab el of ∂ + ( e ) is s m aller than that of ∂ − ( e ). F or W ⊆ V , w e denote by D [ W ] a subgrap h of D = ( V , A, S, f ) induced b y W w ith a set of s p ecified vertic es S ∩ W and a restriction of f on S ∩ W . Let V t b e the set of all ve rtices wh ose lab el is at most t . W e p ro v e by ind uction on t . F or t = 1, it is clear that there exists a D [ V 1 ]-canonical set of in-trees cov ering the arc set of D [ V 1 ]. Assum e that in the case of t ≥ 1, there exists a D [ V t ]-canonical set T of in-trees co v ering the arc set of D [ V t ]. F or s i ∈ S ∩ V t and j = 1 , . . . , f ( s i ), let T i,j b e an in -tree of T w hic h is ro oted at s i and spans v ertices in V t from whic h s i is reac hable. Let v b e a ve rtex whose lab el is equal to t + 1. Case1 : W e first consider the case of v / ∈ S . In this case, from S ∩ V t = S ∩ V t +1 , we will construct a set T ′ of in-trees whic h consists of T ′ i, 1 , . . . , T ′ i,f ( s i ) for s i ∈ S ∩ V t (= S ∩ V t +1 ) suc h that eac h T ′ i,j is ob tained from T i,j . W e fir st consider T ′ i,j for s i ∈ ( S ∩ V t ) \ R D ( v ). F or s i ∈ ( S ∩ V t ) \ R D ( v ), from V i D [ V t ] = V i D [ V t +1 ] holds, T i,j is also a ( D [ V t +1 ] , s i )-in-tree. Thus, we set T ′ i,j = T i,j . Next w e consid er T ′ i,j for s i ∈ R D ( v ). F or s i ∈ R D ( v ), since V i D [ V t +1 ] = V i D [ V t ] ∪ { v } holds, we need to add an arc in δ D ( v ) to T i,j . Here we use a matc hing M in G v whic h saturates v ertices in X v . F or eac h edge x e y i,j ∈ M , w e set T ′ i,j b e an in-tree obtained by adding an arc e to T i,j . If there exists y i ′ ,j ′ ∈ Y v whic h is not conta ined in any ed ge in M , w e arbitrarily c ho ose an arc e ′ ∈ δ D ( v ) suc h that x e ′ is a neighb ou r of y i ′ ,j ′ in G v and w e set T ′ i ′ ,j ′ to b e an in-tree obtained by adding e ′ to T ′ i ′ ,j ′ . F r om the wa y of construction, T ′ is clearly a D [ V t +1 ]-canonical set of in-trees. Since M saturates v ertices in X v , T ′ i, 1 , . . . , T ′ i,f ( s i ) with s i ∈ R D ( v ) con tain all arcs in δ D ( v ). Thus, since T co v ers the arc s et of D [ V t ] from the induction h yp othesis, T ′ co v ers the arc set of D [ V t +1 ]. Case2 : Next w e consider the case of v ∈ S . In this case, since ( S ∩ V t ) \ ( S ∩ V t +1 ) = { v } holds, letting v = s i , we need to add new in-trees T ′ i,j = ( { s i } , ∅ ) for every j = 1 , . . . , f ( s i ) to T ′ whic h is constructed as ab ov e. This completes the pro of of the “if-part”. Only if-part : Assume that ther e exists a D -canonical set T of in-trees co v ering A . F or i = 1 , . . . , d , w e d en ote f ( s i ) ( D , s i )-in-trees of T by T i, 1 , . . . , T i,f ( s i ) . Let us fix v ∈ V , and for X v and Y v w e define a set E ′ in whic h an edge x e y i,j is con tained in E ′ if and only if e ∈ δ D ( v ) is con tained in T i,j . If e ∈ δ D ( v ) is con tained in T i,j , s i is reac hable from ∂ + ( e ). Th us, E ′ is a subset of E v . Sin ce T co v ers A , eac h e ∈ δ D ( v ) is con tained in at least one in-tree in T . Th at is, E ′ saturates X v . Since T i,j is an in-tree, eac h y i,j is con tained in exactly one edge in E ′ . Thus, it is n ot difficult to see that a matching in G v whic h saturates v ertices in X v can b e obtained 13 from E ′ . This completes the p r oof. F rom Theorem 4.1, instead of the alg orithm presente d in Sectio n 3, we can more efficient ly fin d a D -canonical set of in -trees co v ering A by find ing a maximum matc hing in a bipartite graph O ( | V | ) times. In regard to algorithms for fi n ding a maxim um matc hing in a bipartite graph, see e.g. [6]. Corollary 4.2 Given an acyclic dir e cte d gr aph D = ( V , A, S, f ) , we c an find a D -c anonic a l set of in-tr e es which c overs A in O ( match ( M + | A | , M | A | )) time if one exists wher e match ( n, m ) r ep r esents the time r e quir e d to find maximum matching in a bip artite gr ap h with n vertic es and m ar cs and M = P v ∈ V f ( R D ( v )) . Pr o of. F r om the pro of of Theorem 4.1, for eac h v ∈ V , | X v | = | δ D ( v ) | and | Y v | = f ( R D ( v )) hold. Then, | E v | = O ( | δ D ( v ) | · f ( R D ( v ))) follo ws. Thus, the corollary follo ws from P v ∈ V ( | X v | + | Y v | ) = M + | A | and P v ∈ V | E v | = M | A | . Ac kno wledgemen t : W e thank Prof. Tib or Jord ´ an w ho informed us of the pap er [3] and we are grateful to Sh in-ic hi T aniga wa for helpfu l comments. References [1] E. M. Arkin, R. Hassin, and A. L evin . Ap pro ximations for minim um and min-max v ehicle routing problems. J. Algorith ms , 59(1) :1–18, 2006. [2] G. Even, N. Garg, J. K¨ onemann, R. Ra vi, and A. Sin h a. Min-max tree co v ers of graphs. Op er. R es. L ett. , 32( 4):309–31 5, 2004. [3] A. F rank. Ro oted k -connections in d igraphs. D iscr ete A pplie d Mathematics . (to app ear). [4] A. F rank. C o v ering branc hings. A cta Scientiarum Mathematic arum [Sze ge d ] , 41:77–81, 1979. [5] A. F rank. A weigh ted matroid int ersection algorithm. J. Algorith ms , 2(4): 328–336, 1981. [6] J. E. Hop croft and R. M. Karp. An n 5 / 2 algorithm for maximum matc hings in bip artite graphs. SIAM J. Comput. , 2(4):22 5–231, 1973. [7] T. Jord an. Tw o N P -complete augmenta tion problems. T ec hnical Rep ort 8, Departmen t of Mathematics and Compu ter S cience, Odense Univ ersit y , 1997. [8] N. K amiyama, N. Katoh, and A. T akiza w a. Arc-disjoin t in-trees in d irected graphs. In Pr o c. the nine te enth A nnual ACM-SIAM Symp osium on Di sc r ete Algorithms (SODA2008) , pages 518–52 6, 2008. [9] D.E. K n uth. Matroid partitioning. T ec hnical Rep ort ST AN-CS-73-342, C omputer Science Departmen t, S tanford Univ ersit y , 1974. [10] H. Nagamoc hi and K. Ok ada. Appr o ximating th e minmax ro oted-tree co ve r in a tree. Inf. Pr o c ess. L ett. , 104( 5):173–17 8, 2007. [11] J. G. Oxley . Matr oid the or y . Oxford Univ ersit y Press, 1992. 14 [12] A. Sc hrijve r. Combinatorial Optimization : Polyhe dr a and Efficiency (Algorithms and Com- binatorics) . Sp r inger-V erlag, 2003. [13] K. Vidy asank ar. Co ve ring the edge set of a directed graph with trees. Discr ete Mathematics , 24:79– 85, 1978. 15
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment