Anisotropic selection in cellular genetic algorithms
In this paper we introduce a new selection scheme in cellular genetic algorithms (cGAs). Anisotropic Selection (AS) promotes diversity and allows accurate control of the selective pressure. First we compare this new scheme with the classical rectangu…
Authors: David Simoncini (I3S), Sebastien Verel (I3S), Philippe Collard (I3S)
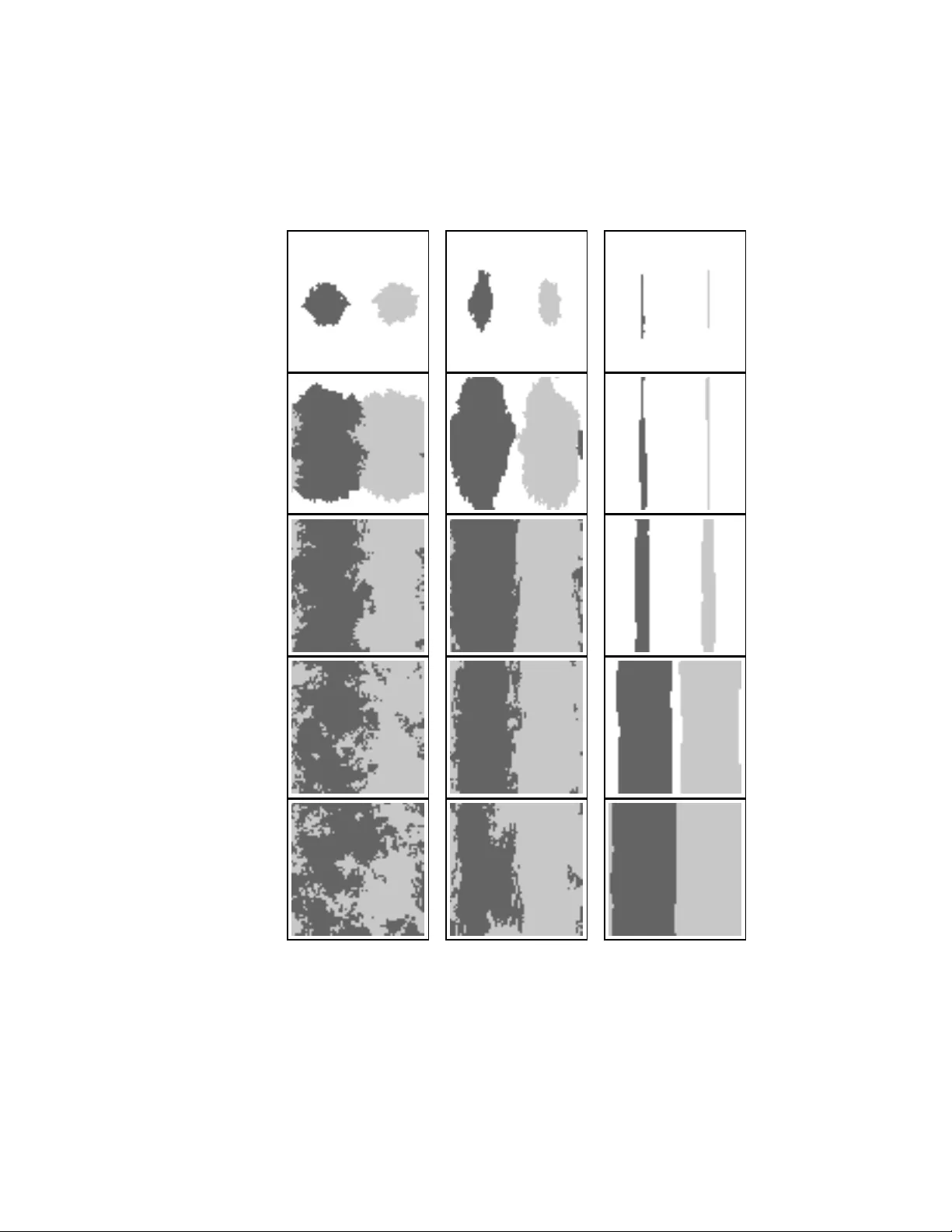
Anisotr opic Selection in Cellular Genetic Algorithms Da vid Simoncini Da vid.Simoncini@uni ce.fr S ´ ebastien V erel Sebastien.V erel@uni ce.fr Philippe Collard Philippe .Collard@un ice.fr Manu el Clergue Manu el.Clergue@uni ce.fr I3S Laboratory , CNRS-Universit ´ e de Nice Sophia Antipol is ABSTRA CT In this paper we in tro duce a new selec tion sc heme in cellular genetic algorithms (cGAs). Anisot r opic Sele ction (AS ) pro- motes diversit y and allo ws accurate contro l of th e selectiv e pressure. First we comp are th is new scheme with the classi- cal rectangular grid shap es solution according to the selec- tive pressure: w e can obtain the same tak eo ver time with the tw o techniques although the spreading of the b est individual is different. W e then give exp erimental results that show to what extent AS promotes the emergence of n ic hes th at su p- p ort lo w coupling and high cohesion. Finally , using a cGA with anisotropic selection on a Qu adratic Assignment Prob- lem w e show the existence of an anisotropic optimal v alue for whic h the b est ave rage p erformance is ob served. F ur- ther w ork will focus on the selectiv e pressure self-adjustment abilit y p ro vided by this new selection scheme. Categories and Subject Descriptors I.2.8 [ Problem Solving, Contr ol Metho ds, and Search ]: [Heuristic meth o ds] General T erms Algorithms Keyw ords Evol utionary computation, combinatoria l cptimization Intr oduction This paper deal s w ith selec tive pressure and diversit y in cellular genetic algo rithms (cGAs) whic h are a sub class of Genetic A lgorithms where the p opulation is embedd ed in a grid. These concepts are closely related to the explo- ration/exploitation trade-off. Previous stud ies on cGAs se- lected the size and the shape of neighborho o ds [13], or th e shap e of the grid [2, 5 , 6] as basic parameters to tune the Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not m ade or dist ributed for profit or commerc ial adv antage and that copi es bear this notic e and the full citatio n on the first pa ge. T o cop y otherwise, to republi sh, to post on serve rs or to re distrib ute to lists, req uires prior speci fic permission and/or a fee. GECCO’06, July 8–12, 2006, Seattle, W ashington, USA. Copyri ght 2006 A CM 1-59593-186-4/0 6/0007 ... $ 5.00. searc h pro cess. Altering these structural parameters entails a deep change in th e w ay we deal with the problem. F or instance, there is n o bu ilt-in mean to sw ap from a rectangu- lar grid to a square grid without misshaping th e neighbor- hoo d relation. W e suggest using anisotr opi c sele ction (AS ) to promote diversit y and to contro l accurately the selec- tive pressure in genetic searc h. The main adv antag e of the anisotr opic sele ction scheme is that it allo ws to control th e exploration/exploitation trade-off without affecting neith er the grid top ology nor the neighborh o o d shap e; so the cellu- lar genetic algorithm we p ropose merely w orks on a square grid and a simple V on Neumann neighborho o d shape. The pap er is divided in 6 sections. Section 1 gives a brief definition of cGAs and an ov erview of existing tec hniques used to control the exploration/exploitation tradeoff. Sec- tion 2 introduces th e AS scheme. S ection 3 studies the in- fluence of AS on t he selective pressure. In Section 4 we compare AS and rectangular grids top ologies’ influ en ce on the selective pressure. In Section 5 w e show how AS pro- motes the emergence of nic hes. In Section 6 we use a cGA on a Quadratic Assignment Problem to measure the cor- relation b etw een anisotrop y and p erformance. Finally we tie together the results of th e p rev ious sections and suggest directions for furth er researc h. 1. SELECT ION IN CELLULAR G ENETIC ALGORITHMS This section presents a brief ov erview on cellular Genetic Algorithms and a standard technique to measure th e selec- tive pressure. 1.1 Cellular Genetic Algorithms Cellular Genetic Algorithms are a sub class of Genetic Al- gorithms (GAs) in which ex ploration and p opulation diver- sit y are enhanced thank s to the existence of small over- lapp ed neighborho o ds [14]. Su ch algorithms are sp ecially w ell suited for complex problems [9]. W e assume a tw o- dimensional toroidal grid as a spatial p opulation structure. Eac h grid cell contains one individual of t he p opulation. The o verlapping neighb orho o ds provide an implicit mechanism for migration of genetic material th roughout the grid. A genetic algorithm is assumed to b e runn in g sim ultaneously on each grid cell, contin uously selecting parents from the neighborho od of that gri d cell in order to produce an off- spring which rep laces the current ind ividual. 1.2 T akeov er Time A standard technique to study the ind uced selection pres- sure without introducing the p erturb ing effect of va riation operators is to let selection b e the only active op erator, and then monitor the num b er of b est indiv idual copies N ( t ) in the p opulation [8]. The takeo ver time is the time it takes for the single b est ind iv idual to conq uer the whole p opula- tion. The grid is initialized with one cell h a ving the b est fitness and all the other having a null fitness. S ince no other evol ution mechanism but selection tak es place, w e can ob- serve the wa y the b est individual spreads ov er the grid b y counting generation after generation the number of copies of this one. A shorter takeo ver time thus means a higher se- lectiv e pressure. It has b een shown that when we mov e from a panmictic popu lation, as in standard GA, to a spatially structured one of the same size with syn c hronous up dat- ing of the cells, the global selection pressure induced on th e entire p opulation is w eaker [13]. Links hav e been established b etw een take ov er time and neighborho od size and shap e or grid topology . Neighbor- hoo d size and shape in a cGA are p arameters that have some influ ence on the takeo ver time. A larger ov erlap of local neigh b orho od s of the same shap e sp eeds up th e b est individual’s spreading o ver th e grid. The influence of the shap e is given by Sarma and De Jong through a measure on the neighborho od whic h represents t h e sp atial disp ersion of a cell pattern [13]. Rather than the size of the neigh b orhoo d in terms of individuals, the key particularity of a lo cal neigh- b orhoo d is its radius. The takeo ver time decreases while the radius increases in a spatially structured p opulation. W e measure the relation b etw een grid top ology and selec- tive pressure for rectangu lar grids where the p opulation size is fix ed to 4096. W e use the follo wing grid shap es: 64 × 64; 32 × 128; 16 × 256; 8 × 512; 4 × 1024 and 2 × 2048 indi- viduals. The selection strategy is a binary tournament. F or eac h cell w e randomly c ho ose t w o individu als in its neigh b or- hoo d. The b est one th en replaces the individual of the cell on the grid if it is fitter or with probability 0.5 if fi tnesses are equal. Figure 1 shows the av erage of 10 3 indep endant runs of grow th of N ( t ) against generations; the takeo ver time is reac hed when N ( t ) is equ al to the size of th e grid ( see T able I). The av erage growth rate ∆( t ), th at is the num b er of new b est individu al copies p er time unit, of these curves for four rectangular grid shap es (64 × 64, 32 × 128, 16 × 256,8 × 512) is plotted in Figure 2. This figure helps us to understand the grow th of N ( t ). The gro wth rate ∆( t ) is th e same for all grids for the fi rst generations. Then, th e spreading sp eeds dow n to reach a constant sp eed for rectangular grids. This constant is 2 lp where p is th e probabilit y of selecting the b est in d ividual when there is one copy of it in th e n eigh b or- hoo d and l the shortest side of th e grid [5]. More accurately , ∆( t ) decreases when l is filled by copies of th e b est indiv id- ual (see Figure 3(b)). Then, the sp eed b ecomes constant until t h e b est individu al has spread o ver to the other side (see Figure 3(c)). This explains why the 64 × 64 grid curve has no constant p erio d : the tw o sides are filled at the same time. Finally , the growth rate falls down to zero as t he b est individual fin ishes conquering the grid. The results of the exp eriments w e conducted are in agreement with E.Alba and J.T roy a observ ations that narrow grid shap es in d uce low se- lectiv e pressure [2]. W e wil l see in the next sections that this b ehavior can b e observed with th e AS to o. 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 50 100 150 200 250 best indiv copies time steps 64*64 32*128 16*256 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 500 1000 1500 2000 2500 best indiv copies time steps 8*512 4*1024 2*2048 Figure 1: Gro wth curv es of the num be r of be st in- dividual copies N ( t ) on different grid shapes . 0 20 40 60 80 100 120 50 100 150 200 250 300 350 400 450 500 Growth Rate Time steps 64 x 64 32 x 128 16 x 256 8 x 512 Figure 2: Gro w th rate agains t time s te ps for four rectangular grid shapes. (a) (b) (c) Figure 3: Spreading of the b est indiv idual ov er a 32x128 grid C 0.2 N E W S 0.2 0.2 0.2 0.2 C N E W S 0.2(1+α) 0.2(1+α) 0.2 0.2(1−α) 0.2(1−α) Figure 4: V on Ne umann and V on Neumann fuzzy Neighborhoo ds with probabilities t o choose each neighbor T able 1: T akeo ver time for diffe rent rectangular grid shape s. T akeo ver Time Grid sh ap e Avg Min Max 64 × 64 83 . 4 1 . 9 79 87 32 × 128 117 . 8 2 . 4 114 123 16 × 256 225 . 0 3 . 8 219 232 8 × 512 449 . 7 6 . 3 437 463 4 × 1024 937 . 1 9 . 9 921 960 2 × 2048 2101 . 2 29 . 9 2045 2155 2. ANISO TR OPIC SELECTION This section introd uces our contribution: the Anisotr opic Sele ction metho d where the neighbors of a cell ma y be se- lected with d ifferent probabilities. 2.1 V on Neumann Fuzzy Neighborhood The V on N eumann n eigh b orho od of a cell C is defin ed as the ball of radius 1 in Manhattan distance centered at C . Using the V on Neumann F uzzy Nei ghb orho o d , we assign dif- feren t probabilities to choose one cell in the neighborho o d according to the directions (see Figure 4). The probability p c to c ho ose th e center cell C is set at 1 5 as fo r V on N eumann neighborho od. Let p ns denote th e probability to choose the cell N or S and p ew denote the probabilit y to choose the cell E or W . Let α ∈ [ − 1; 1] b e the control parameter, th e anisotrop y degree. When α = − 1, we ha ve p ew = 1 − p c and p ns = 0, when α = 0 we hav e p ns = p ew and when α = 1 w e hav e p ns = 1 − p c and p ew = 0. Thus, the probabilities p ns and p ew can b e describ ed as: p ns = (1 − p c ) 2 (1 + α ) p ew = (1 − p c ) 2 (1 − α ) The case α = 0 corresp ond to th e standard V on Neumann neighborho od ( p ns = p ew = 2 5 ) and α = 1 is the limiting case for fuzzy neighborho o d where p ns = 4 5 and p ew = 0. In the latter case, th ere is a vertical n eighb orho o d with t h ree neighbors only 1 . 2.2 Definition The AS op erator exploits the V on Neumann F uzzy Neigh- b orhoo d. I t works as follo ws: for each cell k individuals are selected accordingly to the p robabilities p ns , p ew and p c ( k stands in the range [1 , 5]) within the cell neighborho o d. The k individ u als p articipate to a tournament and the winner re- places the old in d ividual if it is fitter or with probability 0.5 if fitn esses are equal. The contro l parameter α is a measure of anisotropy: α = 0 corresp onds to standard selection, and α = 1 is the limiting case with the u tmost anisotropy . W e conjecture that selectiv e pressure decreases when anisotrop y increases. 3. SELECT IVE PRESSURE AND ANISO TROPIC SE LECTION In this section we study the relationship b etw een selectiv e pressure and AS. First, we measure the takeo ver time for different anisotropy d egrees, th en we take the stud y further by considering the gro wth cu rve of the b est indiv idual. W e measure the effect of d ifferent anisotropy degrees on the takeo ver time. In our experiments, the anisotropic se- lection is based on tournamen t selection of size k = 2 on the square grid of side 64. All t h e 4096 cells are up dated synchronously . F or each cell, we substitute the selected in- dividual t o the one already p resen t in that cell, either sys- tematically if the selected individual is fitter, or with prob- abilit y 0.5 if fitnesses are equal. F or eac h val ue of α , w e p erform 10 3 indep endent ru ns. When α = 0, no direction is privileged and A S is equiva lent t o the standard selection metho d . When α = 1, only one direction is exploited, the grid can n ot b e filled and the takeo ver time is not defined. Figure 5 shows the influ ence of AS on the t akeo ver time : it increases with the parameter α . These results are fairly consisten t with our exp ectation that selection intensit y de- creases when the anisotropic d egree increases. Ho w ever, th e correlation b etw een t ake ov er an d anisotrop y is n ot linear; it rapidly increases after t he v alue α = 0 . 9. 1 using the grid sy mmetry we will consider α ∈ [0; 1] only 64 128 256 512 1024 2048 4096 0 0.2 0.4 0.6 0.8 1 takeover time (log) α Figure 5: Average of the takeo ver time as a function of the a ni sotropic de gree α . 0 500 1000 1500 2000 2500 3000 3500 4000 4500 20 40 60 80 100 120 140 160 180 200 Best Indiv Copies Time steps 0.0 0.2 0.4 0.6 0.7 0.8 0.9 (a) 0 20 40 60 80 100 120 20 40 60 80 100 120 140 160 180 200 Growth Rate Time steps 0.0 0.2 0.4 0.6 0.7 0.8 0.9 (b) Figure 6: Gro wth curves of N ( t ) (a) and ∆( t ) (b) on a square grid for different anisotropic degrees α . Figure 6 sho ws the av erage curves of the gro wth of b est T able 2: V al ues of α and l L for the same takeov er time. Linear regression shows the relation betw een α and l L b y the eq uation α = − 0 . 999 l L + 0 . 998 wi th high correlation coefficie n t − 0 . 9999 l/L α tak eov er time 0 . 00097 7 0 . 9991 1 2101 0 . 00390 6 0 . 9967 4 939 0 . 01562 5 0 . 9864 450 0 . 0625 0 . 944 225 0 . 25 0 . 75 118 1 . 0 0 . 0 83 individual (a) and its gro wth rate ( b) as a function of time steps. The shap e of th e curve is decomp osed into th ree stages: in the first stage, the gro wth rate is almost prop or- tional to the time steps and the growth curve is app ro xima- tively a parab ola. In the second stage, this rate b ecomes roughly constan t after a p eriod of decrease and the growth curve is almost linear. I n the last stage, the rate decreases linearly down to zero with a different slope th an in the first stage. The higher the anisotropic degree α , the weak er the initial slop e of t h e growth rate. In the same w ay in the second stage, the slop e of grow th curve is small er when α is higher. Therefore, the selectiv e pressure is low er when anisotrop y is higher. The t h ree stages of th e growth curve corresp ond to three p eriods in the spreading of the b est indiv idual on the square grid (see Figure 7). Du ring the first stage, the b est individ- ual spreads more in the p riv ileged direction. This p erio d finishes, as describ ed in Section 1.2, when a side of th e grid is filled by b est individu al copies in the priv ileged direction (see Figure 7(b)). During the second p erio d , the b est indi- vidual fills the seco nd direction of the grid until it has spread o ver a side of it in the less p rivileged direction (see Figure 7(c)). The b est indiv id u al front is sharp at the b eginning, and becomes appro ximatively a horizon tal line later. The third time finishes to fill the grid. T aking into account th ese three phases, one may b e able to give th e equation of the gro wth curve as in [5]. 4. ANISO TROPIC SE LECTION VS. RECT ANGULAR G RID Changing rectangular grid shap e and tu ning the anisotro- pic degree are tw o meth ods for va rying the selective pressure. This section compares the tw o metho ds and shows in which w ay th ey are equiv alent. F rom the experimental results presented in Sections 1.2 and 3, we compute the α parameter v alue for which we ob- tained the same takeo ver time as for one particular rectan- gular grid shap e. In T able I I we giv e the α and l L v alues and exhibit the correla tion betw een these parameters. W e can see that α is prop ortional to the l L ratio. So, according to the takeo ver time using α = 1 − l L , it is p ossible to hav e the same selective p ressure using the tw o metho ds. Figure 8 shows the mean gro wth curves of the b est indi- vidual spreadin g against t ime steps for all grid shap es and for the corresponding sq uare grids u sing AS. Although , us- ing th e relation α = 1 − l L , we found the same takeo ver time with rectangular grid shap es and with AS the selective pressure is applied in a different wa y for the tw o methods. (a) (b) (c) Figure 7: Spreading of the b est individual with α =0.75 It is w eaker during the first generatio ns in the anisotropic case then it b ecomes slightly stronger, to finally fill the grid at the same takeo ver time. 5. ANISO TR OPIC SELECTION AND NICHING Man y real optimization problems require the coex istence of diverse solutions during t he searc h. I n this section we sho w how th e anisotropic selection is able to promote nich- ing. 5.1 Niching methods Niching methods ha ve b een prop osed in the field of genetic algorithms t o preserve p opulation d ivers ity and to allo w th e GA to inv estigate many p eaks in parallel. A s a side effect, niching preven ts th e GA from b eing trapped in lo cal optima. Niching metho ds are inspired from nature where species sp e- cialize themselv es to different ecological nic hes in order to decrease the selectiv e pressure t hey undergo. Niching GA’s tend to achiev e a natural emergence of niches in the search space. A nic he is commonly referred to as an optimum of the domain, th e fitness representing the resources of th at 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 50 100 150 200 250 best indiv copies time steps 0 64*64 0.75 32*128 0.944 16*256 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 500 1000 1500 2000 2500 best indiv copies time steps 0.9864 8*512 0.99674 4*1024 0.99911 2*2048 Figure 8: Comparison b etw een gro wth curves on different rectangular grids and on a square grid with the equiv al ent ani sotrop y degree. niche [12]. Niching metho ds are used to solve multimodal problems, and also in dynamic optimization [4]. F or suc h problems a GA must maintain a diver se p opulation that can adapt to the c hanging land scape and lo cate b etter solutions dynamically . There are different niching GA for panmic- tic popu lation: sharing, crowding, etc. These meth ods are based on the concept of distance: sharing [7] decreases the fitness according t o th e number of similar individu als in the p opulation, an d with cro wding, replacement is p erformed considering the d istance b etw een solutions. 5.2 Experimental re sults T o sho w up to what ext ent anisotropic selection promotes niching, we hav e cond u cted exp eriments where tw o solu- tions with the b est fitness (here 1) are placed on a 64 × 64 square grid at the initial generation. These solutions are farther from each other in th e least fa vored d irection (here orien ted horizontally). Figure 5.2 shows some snapshots of the spreading of the tw o b ests o ver generations for different anisotropic degrees. Cells in light grey (resp. dark grey) are copies of the first b est (resp. the second b est), and all white cells have a null fi t ness v alue. Generations gro w from top to b ottom, and the anisotropic p arameter α increases from left to right. The left-h and row ( α = 0) represents standard binary tournament sc hema ; we observe t hat standard selec- tion is n ot able to maintain niches, after 1000 generations the grid is a mixture of the tw o op tima. On the other h an d , as α increases, tw o stable fron tiers b etw een nic hes emerge. Hence AS increases c ohesion in eac h cells lineages. Time steps α =0 α =0.75 α =0.99674 20 50 120 400 1000 Figure 9: Spreading of tw o copie s of the be st individual 6. TEST PR OBLEM W e exp erimen t a cGA using an isotropic selection on a Quadratic Assignmen t Problem (QAP): Nug30. Our aim here is not to obtain b etter results with resp ect to other optimization metho ds, but rather to observ e the b eh a vior of a cGA with AS. In particular, w e seek an optimal va lue for the anisotropy degree. 6.1 The Quadratic Assig ment Pr oblem The QAP is an imp ortant problem in b oth theory and practice. It w as introduced by Ko op m an s and Bec kmann in 1957 and is a mo dal for many practical problems [10]. The QAP can b e described as the problem of assigning a set of facilities to a set of lo cations with given distances b e- tw een the locations and given flows b etw een the facilities. The goal is to place the facilities on locations in such a wa y that the sum of th e p rodu cts b etw een flows and distances is minimal. Give n n facilities and n locations, tw o n × n matrices D = [ d kl ] and F = [ f ij ] where d kl is t he distance b etw een lo ca- tions k and l and f ij the flow b etw een facilities i and j , the ob jective function is: Φ = X i X j d p ( i ) p ( j ) f ij where p ( i ) gives t h e lo cation of facility i in the current p er- mutatio n p . Nugent, V ollman and R uml suggested a set of problem in- stances of d ifferent sizes noted for th eir difficulty [3]. The instances they suggested are kn o wn to h a ve m ultiple lo cal optima, so t hey are difficult for a genetic algortihm. W e ex- p erimen t our algorithm on their 30 v ariables instance called Nug30. 6.2 Experiments W e consider a p opu lation of 400 individuals placed on a square grid. Each individual represents a p ermutation of { 1 , 2 , ..., 30 } . W e n eed a sp ecial crossov er that preserves the p erm utations: • Select tw o indiv iduals p 1 and p 2 as genitors. • Cho ose a random p osition i . • Find j and k so that p 1 ( i ) = p 2 ( j ) and p 2 ( i ) = p 1 ( k ). • swap p ositions i and j from p 1 and p ositions i and k from p 2 . • rep eat n/ 3 times this p rocedu re where n is the length of an individu al. This crosso ver is an extended v ersion of the UPMX crosso ver prop osed in [11]. The mutation op erator consists in ran- domly selecting tw o positions from the in dividual and ex- changi ng t h ese p ositions. The crosso ver rate is 1 and w e p erform one mutation p er individu al in a verage. W e consider 500 run s for each anisotrop y degree. Each run stops after 1500 generations. Figure 10 show s th e a verage p erformance of the algorithm to wards α : for each val ue of α we av erage the b est solution of eac h run. Perf ormances are growing with α and then fall dow n as α is getting closer to its limit v alue. This curve sho ws the infl uence of the selective pressure on the p erfor- mances and h o w imp ortant it is to control it accurately . The b est ave rage p erformance is observed for α = 0 . 86, whic h correspond s to a goo d exp loration/exploitatio n trade- off. In the neighborho o d of this optimal v alue the algorithm fa vors p ropagation of goo d solutions in the vertical direction with few in teractions on the left or right sides. This kind of dynamics is well adapt ed to multi-modal p roblems as we can reach local optima on each columns of t he grid and then migrate them horizontally to fi nd n ew solutions. P erformances would p robably impro ve if the selective pres- sure d id not remain static du rin g the searc h pro cess. As in [1], we can define some criteria to self-adjust the anisotrop y degree along generations. F urthermore, we can assign a dif- feren t anisotrop y degree to each cell of the grid, so that w e can d eterminate criteria to self-adjust selective pressure lo- cally up on measures on neighborho o d s. 6152 6154 6156 6158 6160 6162 6164 6166 6168 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Performances α cost Figure 10: Average costs as a function of α . Conclusions and P erspective s This pap er presents a new selection sc heme in cellular ge- netic algorithms. The main ob jectiv e is to control the ex- ploration/exploitation tradeoff in a flexible wa y . W e pro- p ose to exploit the cellular GA characteris tics to promote diversi ty during a genetic searc h pro cess. Previous studies on cGAs selected structural parameters, as neighborho od or grid shap e, to tun e the selective pressure. The main draw back of these techniques is that altering a structural parameter entails a deep c hange in the wa y we deal with the problem. The new selection scheme we suggest is based on fuzzy neighb orho o d where a cell is chosen according to different probabilities. In order to fav or one d irection rather than the other one, anisotr opic sele ction chooses individu- als in fuzzy neighborho o d. Exp eriments p erformed in order to establish relation b etw een the takeo ver time and the de- gree of anisotropy are consistent with our exp ectation that selection pressure decreases with the degree of anisotropy . Analysis of the growth curves allo ws to distinguish three different phases in the diffu sion pro cess. Exp erimental re- sults establish linear correlati on in tak eov er betw een AS and cGA using rectangular grid. Then w e p oint out capabilities of AS to promote the emergence of niches. Finally , using a cGA with AS on a QAP w e h a ve shown the ex istence of an anisotropic optimal v alue of α such that the b est av erage p erformance is observed. This pap er is a preliminary inv estigation and a more ex- tensive analysis m ust b e made to confirm that eq uilibrium b etw een exploration and exploitation makes AS a go o d tec h- nique for complex problems in static or d ynamic environ- ments. F uture w ork should address the follow ing issues: comparison b etw een AS and c h anges in the neighborho od shap e and size, measuring AS effects with cGA using m u- tation and crossov er, change the balance of directions dy- namically . The latter p oint is an imp ortant feature: b y tun- ing the control parameter α , it would b e possible to make the algorithm to self-adjust th e selective pressure, dep end- ing on gl obal or local measures. This adaptive ability has tw o imp ortant advan tages: first, parameter α ma y v ary in a contin uous w ay , second, v ariations of th is parameter h a ve affect neither on the grid t op ology n or on the neighborho o d shap e. Such self-adaptive algorithms hav e been stud ied in previous works, bu t they need to change the grid topology to control the selectiv e pressure [1] , which means it is uni- form in the grid. AS allows d ifferen t propagation sp eeds on eac h area of the grid, promoting diversificatio n and intensi- fication (exploitation) at the same time on different spots. In general, we h a ve to contin ue inv estigation of Anisot r opic Sele ction to assess its va lidity and generalit y . 7. REFERENCES [1] E. Alba and B. Dorronsoro. The exploration/exploitation t radeoff in dynamic cellular genetic algorithms. I n IEEE tr ansactions on Evolutionnary Computation , volume 9, pages 126–14 2, 2005. [2] E. Alba and J. M. T roy a. Cellular evolutionary algorithms: Ev aluating the infl u ence of ratio. In PPSN , pages 29–38, 2000. [3] J. R . C.E. Nugent, T.E. V ollman. An ex p erimen tal comparison of tec hniqu es for th e assignment of techniques to lo cations. Op er ations R ese ar ch , 16:150– 173, 1968. [4] W. Cede˜ no an d V. R. V emuri. On th e use of n iching for dynamic landscap es. IEEE International Confer enc e on Evolutionary Computation , pages 1–6, 1997. [5] M. Giacobini, E. Alb a, A. T ettamanzi, and M. T omassini. Mo d eling selection intensit y for toroidal cellular evolutionary algorithms. In GECCO , pages 3–11, 2004. [6] M. Giacobini, A. T ettamanzi, and M. T omassini. Modelling selection intensit y for linear cellular evol utionary algorithms. In P . L. et al., editor, Ar tificial Evolution, Sixth International Confer enc e, Evolution Art ificiel le, EA 2003 , Lecture N otes in Computer Science, p ages 345–356, Marseille, F rance, Octob er 2003. Springer. [7] D. E. Golb erg and J. R ic hardson. Genetic algorithms with sharing for multimodal function optimization. International Confer enc e on Genetic Algorithms , pages 41–49, 1987. [8] D. E. Goldberg and K. D eb. A comparative analysis of selection schemes u sed in genetic algorithms. In FOG A , pages 69–93, 1990. [9] K. A. D. Jong and J. Sarma. On d ecen tralizing selection algorithms. In ICGA , pages 17–23, 1995. [10] T. Ko opmans and M. Beckmann. Assignment problems and the location of economic activities. Ec onometric a , 25(1):53–76, 1957. [11] V. V. Migkikh, A. P . T opchy , V. M. Ku reic hik, and A. Y. T etelbaum. Combined genetic and lo cal searc h algorithm for the quadratic assignmen t problem. [12] B. Sareni and L. Kr¨ ahenb¨ uhl. Fitness sharing and niching metho ds revisited. IEEE tr ansactions on evolutionary c omputation , 2(3):1–9, 1998. [13] J. Sarma and K. A. De Jong. An analysis of the effects of neighborho o d size and shap e on local selection algorithms. In PPSN , pages 236–244, 1996. [14] P . Spiessens and B. Manderic k. A massively parallel genetic algorithm: Imp lementation and first analysis. In ICGA , p ages 279–287, 1991.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment