Energy Aware Self-Organizing Density Management in Wireless Sensor Networks
Energy consumption is the most important factor that determines sensor node lifetime. The optimization of wireless sensor network lifetime targets not only the reduction of energy consumption of a single sensor node but also the extension of the enti…
Authors: Erwan Le Merrer (IRISA, FT R&D), Vincent Gramoli (IRISA)
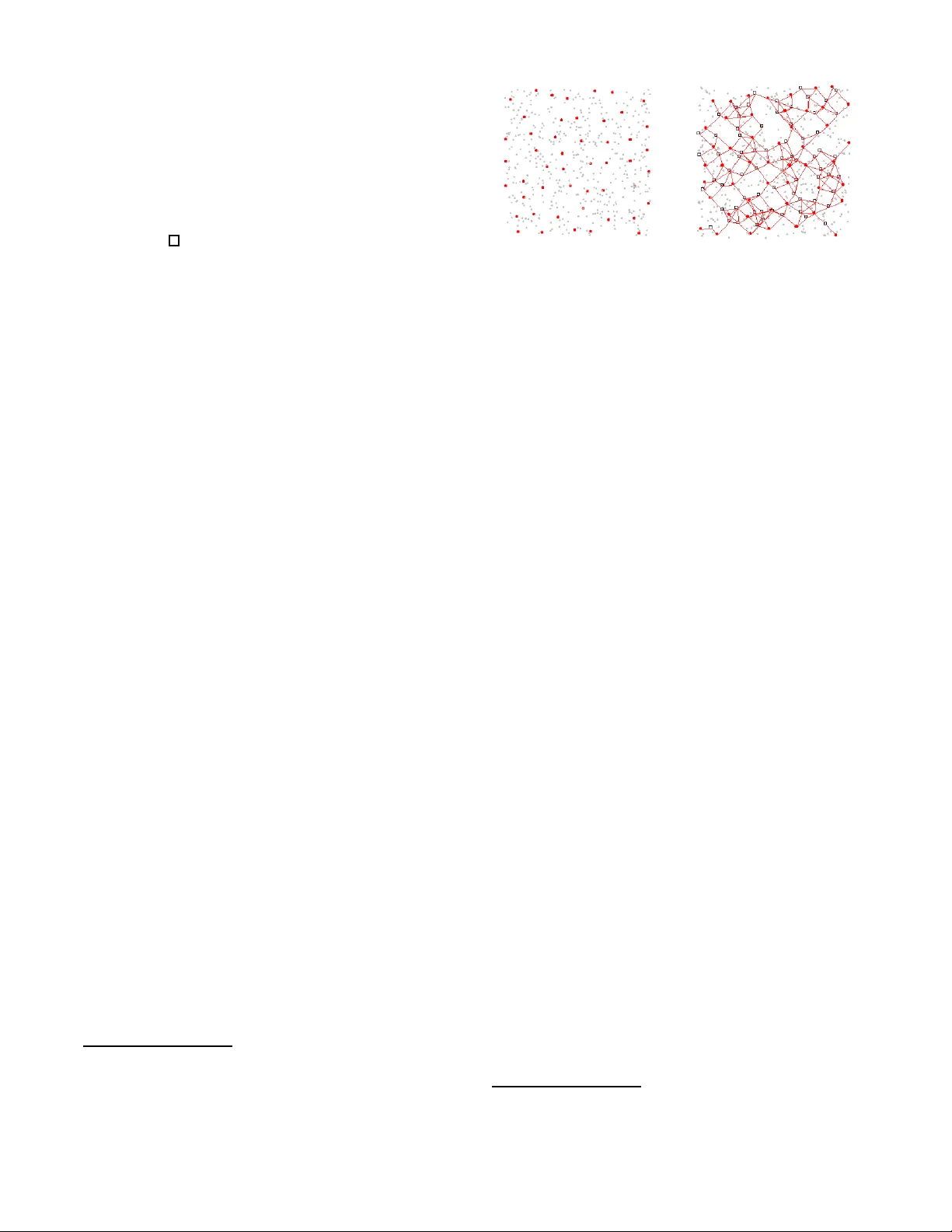
Ener gy A war e Self-org anizing Density Mana gement i n Wireless sensor netw orks Erwan L e Merrer F r ance T elecom and IRISA, F r ance erwan .lemerrer@o rang e- ft.com Vincent Gramoli, Anne-Ma rie K ermarrec, Aline C . Viana IRISA/INRIA, F rance Aline . Viana@irisa.fr Marin Be r tier IRISA/INSA, F rance Marin.Ber tier@irisa.fr ABSTRA CT Energy consumption is the most imp ortant fa ct or that de- termines sensor no de lifetime. The optimization of wireless sensor netw ork lifetime targets not only the reduction of en- ergy consumption of a single sensor no de b ut also the ext en - sion of the entire netw ork lifetime. W e prop ose a simple and adaptive energy-conserving topology managemen t scheme, called SAND (Self-Organizing Activ e Node Density). SA ND is fully decentrali zed a nd r elies o n a distributed probing approac h and on the redundancy resolution of sensors for energy optimizations, while preserving th e data forwarding and sensing capabili ties of the n etw ork. W e p resent the SAND’s algorithm, its analysis of conv ergence, and simula- tion results. Simulati on results sho w that, though sligh tly increasing path lengths from sensor to sink no des, the pro- p osed scheme improve s significantly th e netw ork lifetime for different neighborho o d densities degrees, while preserving b oth sensing and routing fidelity . Categories and Subject Descriptors C.2.1 [ Computer-Communication Netw orks ]: Netw ork Architecture and Design— distribute d networks, wir eless c om- munic ation General T erms Design, Managemen t Keyw o rds Wireless sensor n etw orks, top ology managemen t, p eer-to- p eer distributed systems. 1. INTR ODUC TION Cont e xt. Area monitoring is one of the most typical appli- cations of wireless sensor n etw orks (W S Ns). It consists in deploying a large number of sensors in a given geographic Permission t o make digital or ha rd copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distri bute d for profit or commerci al advant age and tha t copie s bear this notic e and the full citati on on the first page. T o cop y othe rwise, to republi sh, to post on se rvers or to re distribute to l ists, requi res prior speci fic permission and/or a fee. MobiShar e’06, Septe m ber 25, 2006, Los Angeles, California , USA. Copyri ght 2006 A CM 1-59593-558 -4/06/00 09 .. . $ 5.00. area, for collecting data or monitoring even ts. I t is not un- usual that in this situation, human interven tion is not fea- sible. Sensors are th en thrown in mass, for example from a plane, and must b e able t o form a netw ork and to operate in a decentralized self-organized manner, maintaining conn ec- tivity and area monitoring as long as p ossible. In addition, b ecause of the absence of wire and the small p hysical size of sensors, WSNs hav e strong p ow er restrictions. Mechanisms for energy optimization in WSN s constitute then an imp or- tant requirement. This optimization targets not only the reduction of energy consumption of a single sensor no de but also th e ex tension of t he entire netw ork lifetime. The sensor netw ork lifetime is d efined as the p erio d during which the routing fidelity and the sensing fidelity of the netw ork are guaran teed. Guaranteeing sensing fidelity means that any monitored stimulus in th e area will alw ays b e sensed by at least one sensor. Routing fidelity means the existence of a path b etw een any sensor no de and at le ast one base station. Our goal is then to leverage n od e redundancy in WS Ns to reduce and distribut e the computational and communica- tion energy consumption of the netw ork b etw een sensors. W e consider that the co op erative nature of sensors offers significan t opp ortun ities to manage energy consumption. Give n th e p otentia lly large number of sensors in a W SN and th eir limited resources, it is also crucial to deploy fully decentrali zed solutions and to ev enly spread th e load o ver the netw ork. Recent works in Peer-to-P eer (P2P) systems can b e successfully adap t ed t o exp lore new solutions for en- ergy consumpt ion distribution in sensor netw orks. Cont ributions. This pap er describ es an adaptive a nd fully decentrali zed top ology managemen t scheme, called SAND (Self-organizing Active N od e Density). SA N D significantly extends net w ork lifetime by redu cing nodes activity . T he ma jor con tribu tion of S A ND is its simple algorithm: eac h nod e takes lo cal decision based on the observ ation of its neighborho od in order to ensure the properties of routing and sensing fidelity . Moreo ver, S AND as a whole conv erges to w ard s t he exp ected prop erties. In order to manage en- ergy c onsumption, we leverage P 2P’s co op eration paradigms and explore local no de information and sensors resolution through neighborho o d communicatio n only . No no de lo ca- tion information is requ ired, and our app roac h is indep en- dent of any wireless routing p rotocol. F or any configuration of the energy-aw are topology , w e sho w that SAND guarantees that routing and sensing fi- delit y will b e extended. I n comparison with the case where no top ology managemen t is applied, S AND considerably ex- tends netw ork lifetime at th e price of th e slightly increasing paths lengths from sensor to sink n od es. Moreo ver, sim u- lations of SAN D suggest th at netw ork lifetime and SAND’s robustness increases prop ortionally to no de density . Outline. The rest of this pap er describ es and ev aluates SAND. I n Section 2, we discuss the adv antages in p erform- ing p ow er management of radios in wireless netw orks and describe our system mo del. W e rev iew related works in S ec- tion 3. In Section 4, we describ e the SAND app roac h , anal- yse interesting p rop erties, and discuss design issues. W e present the p erformance results in Section 5. F inally , in Section 6, we conclude this pap er and discuss futu re w orks. 2. FOREWORD 2.1 Wher e does the energy go? P o w er dissipation analyses of a sensor no de in t h e lit- erature sho w that wireless communication is a ma jor en- ergy consumer during system op eration [1, 2]. Results show that ( i ) the ov erhearing pro cess increases p o w er consump- tion, 1 and ( ii ) energy optimizations must turn off the radio and not simply reduce pac ket transmission and recept ion. SAND, therefore, incorp orates p ow er management into the comm unication pro cess. W e optimize energy consumption by completely turning off rad io whenever p ossible, conserv- ing energy b oth in I d l e state when no t raffic exists and in o verheari ng du e to data transfer. W e also take advan tage of the sensor n etw ork density for energy savings. SA ND also pow ers do wn sensor n od es that are equ iv alent fro m a sensing p ersp ective. In summary , SAND is a very simple topology management sc heme, which generates lo w communication o verhead. SAND applies in the context of no des that are able to: 1. turn off th eir radios for c ommunic ation p ower c onser- vation , w hile still maintai ning conn ectiv ity b etw een sensors and sinks, i. e. the rout ing fid elity; 2. completely p ow er down for sensing p ower c onserva- tion , while still ensuring a correct stimuli monitoring, i.e. the sensing fidelity . 2.2 System model W e consider a distributed system consisting of a fin ite set of n sensors and s sinks, each un iq uely iden tified . Nodes (sensors or sink s) are spread into a delimited area. W e con- sider that b oth sensor and sink no des form a connected net- w ork or th at all netw ork partitions contain at least one sink nod e. Nodes may crash and recov er during the netw ork life- time, we do not consider Byzan tine failure. W e assume that, although t h ere is no n eed for synchronized clocks, there is an upp er b oun d on the drift rate of lo cal clo cks. W e define δ as an upp er b ound on the transmission time of a mes- sage b etw een tw o neighbors. W e consider that sensing and comm unication ranges are eq u al. SAND do es not requ ire any no d e lo cation information. W e explore density determination by assuming that no des comm unicate on ly by 1-hop broadcast tow ard nod es in their neighborho od , corresponding to th eir transmission range. Finally , a no de may b e in one of th e four follo wing energy states: sleep, sensor-only , router- sensor, and gatew ay . Each state corresponds to a d efi ned no de activity and one or sev- eral services p ro vided to the netw ork (see T able 1). SAN D 1 In [3], auth ors sho w that f or t yp ical sensor netw ork scen arios, around 65% of all pack e ts received by a sensor no de need to b e forwarded to other destinati ons. guides nodes’ energy state switching in d ep endently of the underlying wireless routing proto col. Interactions b etw een SAND and the routing proto col are part of a future work. 3. RELA TED WORKS T op ology management techniques, called SP A N [4 ] and GAF [5 ], have similar goals to those of SAND: they trade netw ork density for energy savings while p reserving the for- w ardin g capacit y of the netw ork. Nevertheless, they d o not exploit the absence of traffic in the active sensing state. Be- sides the energy consump tion reduction in the sensing state, the STEM [6] scheme also prop oses to ensure a satisfactory latency for transitioning t o the routing state. Authors then suggest in tegrating S TEM with scheme such as GAF and SP AN. SAND co ordinates the radio sleep and the w akeup switc h for sensing and /or rout ing states in a uniqu e scheme, b eing no integra tion necessary . 2 Several algorithms hav e b een prop osed for exploiting the area co verag e problem in sensor n etw orks [7, 8, 9]. Con trary to SAND , all these solu- tions assume th at the sensors are aw are of their o wn p osi- tions. A uthors in [8] do not address th e connectivity p rob- lem and req uire every sensor to know all their neigh b ors p ositions b efore making its monitoring decisions [8]. The prop osal presented by Carle and Simplot-Ryl [7] sp ecifies that each sensor n eed s t o construct its sub set of relays and broadcast it t o its neighbors, which generates h igher com- municatio n o verhead th an SAND. The solution prop osed by A. Gallais et al. [9] relies on lo w communication ov erhead and do es not need any neighborho o d discov ery . N everthe- less, no des hav e to memorize the p ositions and the decisions of their n eigh b ors in order to make appropriate monitoring decisions. In S AND, how ever, no des need a small amount of information ( e. g. only a partial neighborho o d discov ery ) and p erform a low pro cessing ove rhead to take their activity decisions. Clustering algorithms can b e also u sed to select router nodes. As an example, M. Chatterjee et al. in [10] use quite sophisticated concept s an d heuristics to decide whic h nod es should b e cluster heads. SAND instead, has as a ma- jor con tribution th e simplicity for router election proced ure. 4. SAND DESIGN RA TIONAL E A ma jor issue in sensor-based applications is the diffusion of the sensed d ata to a specific entit y that can store and process it – the sink no de. Mechanisms that ensure this diffusion are imp ortant components in WS Ns and hav e b een the sub ject of many researches in the literature [11]. In this con text , the cooperation b etw een energy conserving and information diffu sion robustness is crucial. Sensor Router Sleep Sleep order from router Gateway Wake−up order from router 2 routers and no gateway in its No router in its area Same function detected area that already link them Figure 1: Ene rgy s tate transition di agram i n SAND. W e take advan tage of information provided by routing la yer and/or information related to th e envisaged applica- tion to determine when the radio is not needed. W e consider 2 The insuranc e of a satisf actory latency for transitions of state is not our fo cus h ere. T able 1: Energy state description State Energy consumption Activit y Provided service Sle ep very low none - p e rio dically turns on the rad io for receiv ing control m sg Sensor-only low sensing - sen sing - p e rio dically turns on the rad io for receiv ing/sendin g con trol msg - sen ding loc al data, when neede d Gateway high sensing - sen sing routing - receivin g/sending control m sg - sen ding/forwarding data R ou ter-sensor high sensing - sen sing routing - receivin g/sending control m sg - sen ding/forwarding data - m anaging sensor density that during netw ork lifetime, sensor no des can alternate their energy consu mption b etw een four states (see Fig. 1): (1) sle ep , where all hardware comp onents are p ow ered off, (2) sensor-only , where only sensor and some p re-pro cessing circuit y are p ow ered on, and (3) gateway and r outer-sens or , where all hardw are comp onents are p ow ered on. 3 SAND p erforms then the energy-aw are top ology m an agement by contro lling th e rout in g and the sensing fidelity during th e netw ork lifetime. 4.1 F orwarding nodes dis trib ution The forw arding n od es distribution is p erformed in tw o consecutive phases. The first one distributes nodes i n router- sensor state uniformly in the netw ork. The second one con- sists in connecting close router-sensors by selecting no des to switc h to the gatewa y state. These tw o phases are based on the SONDe’s p rinciple [12]: if a no de do es not detect any neighbor in each one of th ese tw o states th en it tu rns itself into th e missing state. 1: Phase 1 : 2: if ¬ router-detection () then 3: status ← router-sensor 4: else if r ← router-detection () then 5: if r. ts > ts then 6: status ← sensor-only 7: Phase 2 : 8: if | ro uters ← detecte d-routers () | ≥ 2 then 9: if ¬ ( g ← gatewa y-detection () ) ∨ ( g. ts < ts ) 10: ∧¬ ( r outers ⊆ g . r oute rs ) then 11: status ← gatewa y 12: else status ← sensor-only 13: else if status = gatew ay then 14: status ← sensor-only Algorithm 1: The SAND Algorithm Algorithm overview. The SA ND algorithm is p resented in Algorithm 1. Each p erio d of time ∆ > 2 δ , the rout er- sensor no des send Hello messages containing their current state and a timestamp ts . Observ e that we d o not fo cus on sp ecifying the message retransmission in case of collision; w e rather assume that this is implemented at a lo w er lay er. The timestamp ts of no de i contai ns: the time i spent in its current state and its identifier (tie breaker). Eac h sensor- only no de in the netw ork chec ks if there is a rout er- sensor nod e in its immediate neighborh o o d, by listening d uring a timeout T on with T on > ∆ + δ . I f no router-sensor nod e is detected, then the sensor-only nod e b ecomes a router-sensor nod e (Lines 2-3). If a router-sensor no de detects the pres- ence of another router-sensor no de in its transmission range 3 Router-sensor and gatewa y nodes can also optimize local ene rgy con- sumption by changing the p ow e r state of t h eir me mory and/or pro- cessor. with a higher timestamp than its own, it comes back to the sensor-only state (Lines 4 -6). While the first phase guaran- tees a goo d distribution of router-sensor, th e second phase (Lines 8-14 ) elects gatew ays to connect them. A sensor-only nod e b ecomes gatew a y if it detects tw o routers and no gate- w ay with a lo w er timestamp t h an its ow n and that already makes a link path betw een those tw o routers. A gatew a y nod e informs with a p eriod ∆ ab out the routers it sees. If a gatew ay detects another gatewa y which connects th e same router-sensor and with a h igher t imestamp t h an its own, it comes back to th e sensor-only state (Line 12). Indepe ndent- dominating set conv ergence. In the fol- lo wing, we show that S A ND presents tw o interesting p rop- erties b orrow ed from graph theory . First, to help rou t ing to a sink nod e, each no de is in th e neighborho od of a router- sensor nod e or is itself a router-sensor nod e. Second, to preven t energy consumpt ion w aste, a sub set of no des b e- comes router-sensor n od es. There are solutions for related problems known as vertex c over and mini mal dominating set , which guarantees activ ated sensors to form such a set. The m in imality problem of the aforementioned solutions migh t invol ve many state changes eac h time a router-sensor crashes. H ere, w e rath er ensure that the sensor-router no des satisfy b oth domination and indep en dence prop erties. This helps at red u cing, yet making it sufficien t, the number of router-sensor no des, while this number has not to b e min- imal. Roughly sp eaking, the router-sensor no des satisfy (i) dominanc e : all no des are either router- sensor or a neigh- b or of a router-sensor and (ii ) indep endenc e : no router- sensor n od e is a n eighbor of another router-sensor no de. The follo wing pro of sho ws that the algorithm con verg es to a configuration verifying both prop erties under system stabilization. Let a r e al-r outer (resp. r e al-sensor ) denote a rout er- sensor n od e (resp. sensor-only no de) that b ecame router-sensor (resp. sensor-only) T on time ago, and whic h did not revert its state since then. Theorem 1. The SAND algorithm c onver ges towar ds an indep endent-dominating set. Pr oof sketch. The pro of is divided i n three p arts. First w e show that the indep en dent-dominating property is an inv ariant. Consider the communicatio n subgraph con taining only real-routers and real-sensors whose real-routers form an indep en dent dominating set when the system stabilizes. That is, any real-sensor no de receiv es a message from a real- router in eac h T on p eriod of time and does not become a router. Similarly the real-routers stay in their state. Second w e show that indep end ence can n ever be violated. Observe that no d es are initiall y in their sensor-only state and thus can not violate ind ep endence by aw akening. Be- fore stabilization, real-router can crash b u t indep endence is never violated since message delay remains b oun d ed. Finally , w e sh ow that the num b er of lo cations where the dominance is violated eventually d ecreases, let G be any comm unication subgraph whose set of real-routers is not dominant. After s ome time, some no des of G b ecome routers. This m ight h ap p en in the meantime at differen t places in the same n eighborhoo d. After a T on dela y , messages are ex- changed b etw een rout ers and the one with the low est ts is chos en to become exclusivel y the real-router of the neig hbor- hoo d. Oth er router n o des, so as sensor-only no des, b ecome real-sensor. Exp eriment describ ed in Fig 2(a) confi rms our t heoretical analysis and shows the result of our router selection after three simula tion rounds: this sim ulation leads to 50 router- sensor n od es (b lac k circles) for 450 sensor-only no d es (gra y circles). Provided these prop erties, w e claim that a sufficient sensor nodes densit y will provide e nough gatewa y candidates to ensure th e connection b etw een tw o close router-sensors. Consequently , SAN D d oes not determine th e optimal mini- mum num b er of forw arding no des to maintain sink connec- tivities, ensuring then, that there are several path s b etw een any no de and at least one sink. This redund ancy makes the routing fidelity more resilient to failures. Ou r claim is sat- isfied by the exp eriments obtained in Fig. 2 (b) commented hereafter. Sp ecifying a proto col to obtain a path among all router-sensors from a dominating set is left as an op en wo rk. 4.2 Sensing guarantee Fidelit y in stim uli sensing can b e ensured only by router- sensor and gatewa y no des, b ecause th ey are uniformly dis- tributed in the netw ork and their sensing range is equal to their t ransmission range. Nev erth eless, for reliabilit y is- sues and for the cases where a sp ecific sensor n od e density should b e ensured, SAND allo ws the control of th e sensor- only no des resolution in each target area, while p erforming the sensing load distribut ion among no des. T o th is end, router-sensor no des are in charge of selecting nod es to switc h to sleep or sensor-only state. This selection dep ends on the envisaged reliabilit y degree of the monitored area. Thus, nod es that are for a long time in the sensor- only state will b e selected to switc h to sleep state, and vice versa . Each sensor-only n o de perio dically turns on its ra- dio and sends Hello messages containing its curren t state and its estimated lifetime ( el ). 4 No d es in sleep state also p eriodically turn on t heir radio, b ut never send messages. 5 Up on reception of sensor-only el of sensor-only n eigh b ors, router-sensor nodes compute the avera ge (by considering the el of the last switched-to-sleep n o des t o o) and th e standard deviation (by considering only th e sensor-only no des th at hav e low er el than th e resulting a verage). Finally , router- sensor no des send 1-hop “ switch-to -sleep ” order messages to sensor-only no des that hav e their e l level low er than the resulting standard deviation. The switc h of sensor-only t o sleep state is p erformed as so on as another sensor-only nod e app ears in the monitored area. Sensor-only no des also turn on their radio if any lo cal collected data h as to b e transmit- ted to t he sink ( e.g. , for full memory resource). Router-sensor no des also control the switc h from sleep to sensor-only states, by sending “ switch-to-sensor ” order 4 el corre sp onds to the exp ect e d r emainin g no de ene rgy and i s set by assuming that no des wil l hav e a start e nergy level and th ey will consume ene r gy (relate d to the i r state) until they die. 5 W e assum e th eir estimated lifeti me is the same of the last el sent when they were in the se nsor-only state. Figure 2: A 300 × 300 m area netw ork with an aver- age of 20 neighbors p e r node representing: (a) the router sele ction, (b) the energy state di s tribution. messages. 6 In this case, n od es in th e sleep state switc h to the sensor-only state if th ey hav e (1) their radio turned on, and (2) their el level is higher than the computed av erage. In addition, like sensor-only n od es, n od es in the sleep state with t he radio turned on, verif y their router- sensor no de con- nectivity . If no Hello message from a router-sensor no de is receiv ed, a sleep no de b ecomes a sensor-only no de and t h en, based on the SAN D b o otstrap proced ures, can switch to th e router-sensor or gatew a y state. Fig. 2(b) shows the result of the S AND energy state distribution at a random p oint in time. The figure presents 68 router-sensor no des (black cir- cles), 47 gatew a y no des (squares) and 385 sensor-only and sleep no des (gray circles). The line connecting p oints rep- resen ts the connectivity among forw arding no des. The net- w ork conn ection among forwarding, sleep, and sensor-only nod es is not represen ted here. This sho ws that the generated forw arding top ology is conn ected . 4.3 Discussion W e now discuss some design choices. Outlining parameters: The radio of sleep and sensor- only n od es is p eriodically turned on for fidelity veri fications at in terv als T of f and sta y on for a t least a timeout v alue T on . The range of T of f can b e influ en ced by the time th at n o des hav e b een conserving their energy during th e sleep state. Optimizations of these p arameters are under ev aluation. Outlining adv antages: Con trary to some existing area co verage solutions, SA ND d oes not require no des p osition information or geographic co verage computing for ensu ring connectivity . Therefore SAND has a lo w computing over- head. Moreo ver, since no des do not need to p erform a com- plete neighborho o d discov ery to take their state decisions, SAND has al so as adv an tage a low co mmunicatio n ov erhead. What i f di sconnections o ccur: Considering the p o or failure resilience of sensor n od es and the S AND’s guarantee of sink connectivit y , it may o ccur that failed no des cause temp orary disconnections. This can also o ccurs if Hello messages from router-sensor no des are lost, causing gate- w ay nod es to b ecome sensor-only no des. Nevertheless, since SAND allow s disconnection detection and restores connec- tivity by state switching, we consider that disconnection p e- riods will not b e long. No des may store t heir messages and w ait for conn ectivity restora tion. In the case of router-sensor Hello message losses, gatew ay no des can b e instrumented to w ait at least a timeout v alue of 2 × T on b efore deciding to switch to sensor-only state. This kind of improv ements is sub ject t o future wo rks. 6 In the c ase of the rece ption of t wo c ontrary order me ssages, th e priority is given to the “ switch-to-sensor ” messages. 5. PERFORMANCE EV ALU A TION W e h ave condu ct ed a number of sim ulation exp eriments o ver 800 roun ds, using a simulator consisting of the SAND engine and a netw ork em ulation environment. W e ex p eri- ment on a large sca le stati c net work with 4,700 no des. Nodes are uniformly d istributed ov er a squ are area of 700 m on a side and hav e a transmission range of 37 m . The dynamism of th e created top ology is imp osed by fail no des only . The sim ulator is a discrete time-based en gine, in whic h actions are p erformed p er round of simulation. W e hav e set T of f to be 2 roun d s. W e consider that no des send order or Hello messages at eac h round. W e also consider th at sensor-only nodes send Hello messages at eac h ∆ p erio d, where ∆ and T on are initially set to 1 round. W e set all no des with an estimated lifetime e l of 100,000 unities ( u ). Our energy consumption mo del is based on th e p ow er consumption of th e sensor no de describ ed in [13]. W e consider t hus, the costs describ ed in T able 2 . The n etw ork lifetime column sh ows approximated v alues for the estimate maximum lifetime corresp onding to no des in each state. W e un iformly generated 1,000 stim uli o ver the netw ork. Unless otherwise sp ecified, w e set th e reliability degree of eac h monitored s timulus to 5 no des. No wi reless rout ing p ro- tocol is implemented. Thus, to ev aluate the routing fi delity of our approac h, we simply verif y if th ere is a path b etw een a source no de ( i.e. , a sensor-only , a gatew ay , or a router- sensor no de) and at least one sink n od e. P ath verification is p erformed each time a stimulus is generated. Unless other- wise sp ecified, sink n od es are uniformly distributed ov er th e netw ork and correspond to 1% of all no des. T o examine th e impact of the neighborho o d density in the netw ork lifetime, w e v ary the n umber of nod es from 1,000, to 1,900, 2,800, and 4,700 ( corresp onding to approximately 10, 20, 30, and 50 n eigh b ors in range, resp ectivel y), while keeping constant the area and the transmission range of no des. T able 2: Energy consumption No de Radio Energy Estimated state state consumption lifetime Sle ep radio OFF ± 10 u ∼ = 3300 radio ON ± 70 u r ound s Sensor-only radio OFF ± 200 u ∼ = 450 radio ON ± 270 u r ounds Gateway and radio ON ± 1040 u ∼ = 96 R ou ter-sensor r ounds W e ev aluate SA N D along the follo wing metrics: (i) the netw ork lifetime and the en ergy conserva t ion; (ii) the for- w ardin g robustness; (iii) the sensing fidelit y preserv ation; and (i v) the effects of netw ork d ensity . Exp erimental resul ts. One of th e SA ND goals it to pre- serve netw ork routing fidelity . W e consider that if paths in the gatew ay/router-sensor nodes backb on e exist, th ere are similar n on-conflicting paths in th e u n derlying netw ork. Fig. 3(a) ev aluates the robustness of SAND in ensuring a sink connectivity in a 1,900-nodes netw ork. F or this pur- p ose, we v ary the sink no de density from 0.5%, 1%, and 1.5% of the t otal num b er of nod es. As exp ected, as sink resolution decreases, more active nod es are needed to ensure sink connectivities. This results in a decrease of th e netw ork lifetime and the faster en ergy exh austion of no des. Nev- ertheless, compared t o results obtained in Without-SA N D top ology with 1% of sink d ensity , S AND still extends the num b er of forwarding paths of net work (95% of p aths are ensured for a double of time t h an in Without- SAND) , even with a lo wer sink resolution of 0.5%. Additionally , for different neighborho od densities, w e sho w that despite using few er forw arding no des, SAND do es n ot significan tly increase the number of hops of paths to sink nod es. T able 3 shows the ave rage ( τ ) and the standard de- viation ( σ ) path length of SAND and Without-SAN D, calcu- lated while 90% of th e generated stimuli are sensed and cor- rected forwa rded. SA ND constructs forw arding paths with only a slightly higher n umber of hops, on a verage 18% of more hops. T able 3: Path l ength results. SAND W/o-SAND Num b er Neighborho o d of no des density τ σ τ σ 1,000 10 3.146 1.844 2.566 1.843 1,900 20 3.408 2.267 2.762 2.047 2,800 30 3.043 2.086 2.461 2.057 4,700 50 2.486 2.046 1.961 2.114 Fig. 3(b) show s the av erage of energy remaining at each nod e after 40 simulation rounds under different neighbor- hoo d densities. In th is simulation round, all n od es in the netw ork are still alive. The figure also compares the energy conserv ation resulted in SAND with the case where n o p ow er managemen t is p erformed. W e observe that SA ND pro- vides a considerable amount of energy saving o ver Without- SAND. This is because all no des in Without -SAND topology hav e the same energy consumption as router-sensor no des. In SAND , ho wev er, no des switch when ever p ossible to sleep or sensor-only states, as a few forw arding no des are present in eac h transmission range. W e also chec k that the energy sa v ing increases p rop ortionally to th e neighborho od density . This is due to the fact that as the d ensity increases, a low er fraction of alive no des is comp osed of forw arding no des (th e highest consumer of energy state), while a higher fraction are in the sleep state (see Fig. 3(e)) . Fig. 3(c) ev aluates the robu stn ess of SAN D with resp ect to sensing fi delity , in a 1,900-nod es netw ork . W e v ary t he required sensor no de density in the netw ork from 2, 7, and 10 nod es, and show th e rate of success sensed stimuli for eac h d ensity . Compared to the results obtained in Without- SAND top ology (where all no des are sensing for all the sim- ulation time), SAND exten ds the number of sensed stim u li o ver the netw ork lifetime, even when a lo wer sensor no de resolution of 2 is used p er target area. SAN D ensures for a triple of time, 95% of sensing fidelity th an With ou t -SAND . As exp ected, the increase of the num b er of required sen- sor density , impacts th e energy consump tion of n od es and consequently , decreases th e netw ork lifetime. Fig 3(d) sho ws the results of the p erformance of SAND in ensuring sink connectivity for d ifferent n eigh b orhoo d densi- ties (for 20 and 50 neighbors in range) and sink resolution (for 0.5%, 1%, and 1.5% of th e total num b er of no des). As exp ected, SAND is less impacted b y sink resolution w hen th e neighborho od density increases. This is because the increas e of n eighborhoo d densit y , increases the num b er of forw ard- ing candidates, and consequently , increases the probability of fin ding paths to sink no des. Fig 3(e) shows the fraction of active and forw arding n od es after 120 rounds of sim ulation (among many exp eriments), under different neighborho o d d ensities. Here, w e compare the fraction of active and forwarding no des o ver th e total num b er of no des in the netw ork and over the total num b er of alive no des. W e show that th e p otential of sa ving energy of SAND dep ends on the nod e density , since the fraction of active and forw arding no des dep en d on the number of 0 0.2 0.4 0.6 0.8 1 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 Successful packet delivery rate Simulation time SAND, sink: 0.5% SAND, sink: 1.0% SAND, sink: 1.5% Without-SAND, sink: 1.0% (a) 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 Average of energy remaining (Ku) per node Neighborhood density SAND Without-SAND (b) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 0 80 160 240 320 400 480 560 640 720 800 Successful sensed stimuli rate Simulation time SAND: 2 sensor nodes SAND: 7 sensor nodes SAND: 10 sensor nodes Without-SAND (c) 0 0.2 0.4 0.6 0.8 1 0 80 160 240 320 400 480 560 640 720 800 Successful packet delivery rate Simulation time 20 neigh. density 50 neigh. density Sink: 0.5% Sink: 1.0% Sink: 1.5% (d) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 0 10 20 30 40 50 60 Active nodes rate Neighborhood density Active over alive nodes Active over total number of nodes Fwd over active nodes Fwd over alive nodes Fwd over total number of nodes (e) Figure 3: (a) T he sink connectivi ty . (b) Average of energy remaini ng after 40 rounds. (c) The stimuli sensing fidelity . (d) Successful forwarding paths. (e) F raction of active and forwarding node s. nod es p er radio cov erage area. W e can easily verify that the higher the no de den sit y , the low er th e p ercentage of active nod es in the net w ork. Also the rate of f orw arding no d es o ver the number of active nod es decreases as the neighborho o d density increase. On the other hand, despite t h e increase of the rate of forwarding no des o ver the total number of nod es, the n umb er of forw arding no des becomes almost constant f or higher neighborho o d densities ( e.g. , for 30 an d 50 neigh b ors in range). 6. CONCLUSION In t his pap er, we hav e p resented S AND, an approac h to energy conserv ation for wireless sensor netw orks. Energy consumption is one of th e most imp ortant factors t hat de- termines sensor no de lifetime. SAND is a fully decen tralized, simple, and efficient algorithm able to significantly ex tend not only sensor lifetime but also th e entir e netw ork lifetime. SAND focuses on turning off the nodes radio as much as p ossible while still en suring stimuli sensing and multi-hop routing fi delity . W e hav e p resented th e algorithm analysis and the sim ulation of SAN D. O ur experiments sh ow that SAND guarantees for a longer time, ( 1) the existence of paths b etw een an y sensor no de to at least one sink n od e in the netw ork an d (2) the correct sensing of stim u lu s in a monitored sensor netw ork. SAND improv es considerably netw ork lifetime prop ortionally to no de density , at the price of the slightly increasing p aths length from sensor to sink nod es. Additional analyses are b eing p erformed to eval uate the netw ork b ehaviour of SAND as nod es mov e. W e also in- tend to study netw ork partitions and to val idate our results with physical hardware in real scenarios. 7. REFERENCES [1] V. Raghunathan, C. Schurgers, S. Park, and M. Sriv asta v a, “Energy-aw are wirele ss m icrosensor netw orks,” IEEE Signal Pr oc essing Mag azine , vol. 19, no. 2, pp. 40–114, Mar. 2002. [2] D. Estrin, R. Govindan, J. He idemann , and S. Kumar, “Next century challenges: S calable co ordinati on in sensor netw orks,” in Pr oc e e dings of ACM International Confer enc e on Mob ile Computing and Networking (MOBICOM) , pp. 263–270, 1999. [3] V. Tsiatsis, S. A. Zimbeck, and M . B. Srivas tav a, “Architecture strategie s for en e rgy-efficient pack e t forw arding in wireless sensor netw orks,” in Pro c ee dings of ACM International Symp osium on L ow Power Ele c tr onics and Design (ISLPED) , pp. 92–95, Aug. 2001. [4] B. Che n, K. Jamieson, H. Balakrishnan, and R. Morri s, “Sp an: An energy-effici ent coordi nation algorithm f or top ology maintenance in ad ho c wirele ss ne tw orks,” in Pr oc e e dings of A CM International Conferenc e on M obile Computing and Networking (MOBICOM) , pp. 85–96, July 2001. [5] Y. Xu, J. Heidem ann, and D. Estrin , “Geography-informed energy conserv ati on for ad ho c rou ting,” in Pr oc e edings of A CM International Conferenc e on M obile Computing and Networking (MOBICOM) , pp. 70–84, July 2001. [6] C. S ch urge rs, V. Tsiatsis, S. Gane riwal, and M. Sriv asta va, “Optimizi ng sensor netw orks i n the e nergy-laten cy-density design space,” IEEE T r ansactions on Mob ile C omputing , vol. 1, no. 1, pp. 70–80, May 2002. [7] J. Carle, A. Gallais, and D. Simplot-Ryl, “Preservi ng area cov erage in wirele ss sen sor n e tw orks based on surf ace cov erage relay domin ating sets,” in Pro c ee dings of IEEE Symp osium on Computers and Comm unic ations , pp. 347–352, June 2005. [8] D. Tian an d N. Georganas, “A cov e rage-preservin g no de scheduling scheme f or large wireless sensor netw orks,” in Pr oc e edings of ACM Wir eless Sensor Network and Applic ation Workshop , S ept. 2002. [9] J. Carle, A. Gallais, D. Simp lot-Ryl, and I. Sto jme novic, “Loc alized se nsor area cov erage with low communication ov erhead ,” in Pro c. of IEEE Int’l Confer ence on Pervasive Computing and Commu nic ations , pp. 328–337, 2006. [10] M. Chatterjee , S. K. Das, and D. T u rgut, “Wca: A weigh t e d clusterin g algorithm for mobil e ad ho c netw ork s,” Journal of Cluster Computing (Sp ecial Issue on M obile A d hoc Networks) , vol. 5, no. 2, pp. 193–204, Ap r. 2002. [11] J. N. Al-Karaki and A. E. Kamal, “Routing techniques in wireless sensor netw orks: A survey ,” IEEE W ir eless Communicati ons , vol. 11, no. 6, pp. 6–28, Dec. 2004. [12] E. L. Merrer, A.-M. Kermarre c, and D. Neveux, “Sonde: Self-organiz ing density for p e er-to-p eer ne tw ork serv ices,” tech. rep., IRISA/INRIA-Rennes, F rance , 2006. [13] A. Sinha and A. Chandrak asan, “Dynami c p ow e r manage ment in wireless sensor netw orks,” IEEE Design & T est of Computers , vol. 18, no. 2, pp. 62–74, Mar. 2001.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment