Constructing Seifert surfaces from n-bridge link projections
This paper presents a new algorithm "A" for constructing Seifert surfaces from n-bridge projections of links. The algorithm produces minimal complexity surfaces for large classes of braids and alternating links. In addition, we consider a family of k…
Authors: Joan E. Licata
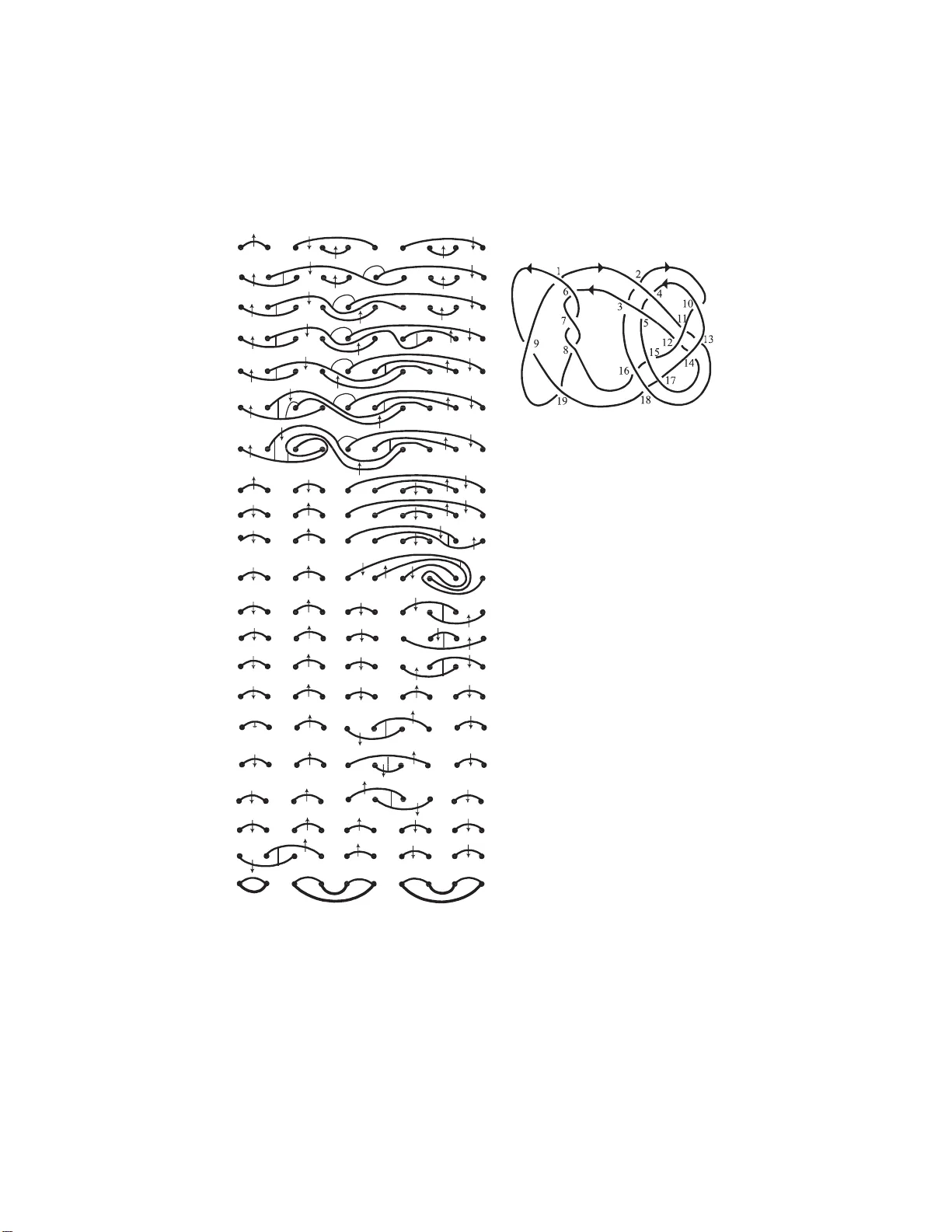
Constructing Seifert surfaces from n -bridge link pro jections Joan E. Licata July 17, 2021 Abstract This pap er presents a new algorithm A for co nstructing Seifert surfaces from n -bridge pro- jections of links. The a lgorithm pro duces minimal complexity surfaces for large cla sses of br aids and a lternating links. In addition, we co nsider a family of knots for which the canonical genus is strictly greater than the genus, ( g c ( K ) > g ( K )), and show that A builds surfaces realizing the knot g enus g ( K ). W e also present a generalizatio n of Seifert’s algor ithm which may b e used to construct surfaces representing arbitrary rela tive second ho mo logy class es in a link complement. 1 In tro duc tion A S eifert surface for an oriented link is a n orien table surface whose orien ted boun dary is the link. This notion giv es rise to a fundamenta l inv arian t of k n ots and links: the minimal gen us of a Seifert surface for L is known as th e genus of L and d enoted b y g ( L ). In this pap er we presen t a new algorithm, A , w hic h builds S eifert surfaces fr om n -bridge pro jections of links. F o r certain large classes of link pro jections, t h e a lgorithm b uilds surfaces realizing the link genus. (Theorems 1 and 2.) Seifert’s algorithm is a classica l met ho d for constru cting Seifert surfaces from a link p ro jection. The minimal p ossible gen us of a surface constructed via Seifert’s algorithm is kno wn as the c anonic al genus g c ( L ) of the link. In the case of alternating p ro jections or p ositiv e braids, Seifert’s algorithm realizes b oth the gen us and the canonical genus. Ho we ver, there also exist links for w hic h g c ( L ) > g ( L ). Section 2.3 presen ts a family of suc h e xamples due to Kobay ashi, K oba y ashi, and Ka wa uchi ([KK96] , [Ka w94]), and w e sho w th at A successfully yields surfaces realizing the knot gen us. Theorem 1. The surfac e Σ A built by ap plying A to an a lternating n -b ridge pr oje ction of a link L has genus e qual to the genus of L . Theorem 2. L et B b e a br aid on n str ands with the pr op erty that e ach gener ator of the br aid gr oup app e ars with only one sign in the br aid wor d. If L is the n -bridge link pr oje ction forme d by taking the closur e of B , th en the surfac e Σ A built by ap plying A to L has genus e qual to the g enus of L Morse theory p ro vides the k ey to ol in this construction. An n -bridge pr o jection of a link has a natural Morse function giv en b y height on the page, and this extends to an y Seifert surface for the link. Giv en suc h a sur face, the Euler c haracteristic is a signed sum of the num b er of critical p oint s of the Morse fun ction F . These in turn corresp ond to c hanges in the top ology of F − 1 ( x i ) for generic x i ∈ R , where eac h F − 1 ( x i ) can b e though t of as a horizont al slice through the surface. Although this description tak es a Seifert s u rface as its starting p oin t, the ob s erv ation that a sequence of horizonta l sections through a surface determines its Euler characte ristic may b e u sed 1 constructiv ely: b y sp ecifying suc h a sequence, one in fact builds a Seifert surface. The algorithm A is a set of instru ctions for constructing a sequ en ce of slices compatible w ith a fixed n -bridge link pro jection. The Morse theoretic approac h to surf aces is fund amen tal to the new algorithm A , but this p oint of view also enables a new pr esen tation of the classic al Seifert’s algorithm. This in turn extends to an algorithm whic h constructs surfaces repr esen ting arb itrary s econd homology classes in link complemen ts. 1.1 Organization and con v en tions Section 2 b egins with a m ore detailed exp osition of the Morse theoretical context , and A is de- scrib ed in detail in 2.2 . Section 2.3 presen ts sev eral examples of A applied to links, including examples for w hic h the canonical gen us is greater than the genus. A Morse-theoretic version of Seifert’s algorithm, in tro d uced in Section 3 , is used to pro ve T heorems 1 and 2 in Sections 4 an d 5, resp ectiv ely . Finally , the p ap er concludes with a generalization of th e Mo rse Seifert’s algorithm to constructing surf aces r epresen ting arbitrary r elativ e second h omology c lasses in link complements. Throughout this pap er all links will b e assumed to b e n onsplit. Links are also assumed to come with fixed pro jections, so that w e sp eak of applying an algorithm to the link rather than to the link pro jection. Finally , w e will use a standard p resen tation of the braid group wh ere generators are p ositiv e half-twists b et w een adjace nt strands: B k = ( b 1 , b 2 , ...b k − 1 k b i b i +1 b i = b i +1 b i b i +1 ; b i b j = b j b i , | i − j | ≥ 2) 2 The algorithm A Th u r ston in tro du ced the notion of the c omplexity of a surface em b edded in a three-manfold [Thu86] . Definition 1. Let S b e a su rface with comp onents s i prop erly embedd ed in a three-manifold w ith b ound a y . The c omplexity of the surface, χ − ( S ), is giv en b y the follo win g sum , where χ ( s i ) denotes the Eu ler c haracteristic of s i : χ − ( S ) = X i : χ ( s i ) ≤ 0 − χ ( s i ) . A minimal complexit y su rface is a m inimal gen us sur f ace, but complexit y is b oth easier to work with in th is conte xt and generalizes more naturally to other second homology classes in the link complemen t. (See Section 6.) 2.1 Morse theory prelimina ries Definition 2. An upp er cr ossingless match on 2 n colinear p oints is a collect ion of n disjoint cu rv es b ound ed by the p oin ts and lying enti rely ab o v e the line of the p oin ts. T he v ertical reflection of suc h a fi gu r e, in whic h all the curves lie b elo w the line of the p oints, is a l ower cr ossingless match . Figure 1 illustrates the up p er crossingless matc h es on six points. An n -bridge pr oje ction of a link is a decomp osition in to a pair of crossin gless m atc hes on 2 n p oint s (o ne upp er and one lo w er) toget h er with a br aid on 2 n strands connecting th e endp oin ts of the crossingless matc h curves. T he cur v es of the crossingless matc hes are referred to as the bridges 2 Figure 1: Th e upp er crossingless matc hes on six points. Figure 2: The p ositiv e crossing on the left corresp onds to the isotop y of the mark ed p lane sho w n on the righ t. of the pro jection. Every link has an n -bridge pro j ection for some n . This is easily seen via the fact that an y link has a pro j ection as a closed br aid, wh ic h is a k -b r idge pro jection for k equal to the braid ind ex. Give n an y n -bridge pro jection, heig ht on t he page pro vides a natural Mo rs e function f : L → [0 , 1] whic h maps the upp er and lo wer b ridges to [1 , 1 − ǫ ) and ( ǫ, 0], resp ectiv ely . F or any x ∈ ( ǫ, 1 − ǫ ), f − 1 ( x ) consists of 2 n p oint s wh ic h ma y b e though t of as the intersect ion of the b raid B with a h orizon tal p lane at h eigh t x . As x c hanges, th e p oin ts mov e around this plane via an isotop y defined by B . More p recisely , the braid group generator b i maps to an isotop y b i of the m ark ed p lane whic h interc h anges th e i th and ( i + 1) th p oint s b y clo c kwise rotation of a neigh b orh o o d of the pair. (See Figure 2.) b i is the iden tit y a wa y from a neigh b orho o d of these t wo p oint s, and m ultiplication in the braid group corresp onds to comp osition of the asso ciated b i . This map is well-defined up t o isoto py fi x in g the en dp oints of B . The Morse function f extends to a Morse function F on any Seifert surface Σ for L . F or a generic x , F − 1 ( x ) is a colle ction of n disjoint curves connecting the p oints of f − 1 ( x ) a nd p ossibly some disj oin t simple closed curve s. W e call the pre-image of a generic p oint of F a fr ame . According to th e Morse Lemma, ([Mil63], Theorem 3.2), a critical p oin t for F corresp onds to handle addition in Σ, and this in turn is reflected in a c hange in the top ology b et w een f rames immediately ab o v e and b elo w the critic al p oin t. There are three typ es of h andle add itions, corresp onding to index zero, one, and t w o critical p oint s. Addin g a zero-handle (“birth mo v e”) to Σ corresp ond s to in tro du cing a new innermost simple closed curve to a frame. Add ing a t w o-handle rev erses this pro cess and is known as a death mo v e. One-handle addition creates a saddle in Σ and c hanges a frame b y resolving along an arc as indicated in Fig ur e 3. T o build a su rface using A , let F − 1 (1 − ǫ ) b e the u p p er crossingless matc h of the link pro jection. The braid isotop y d escrib ed ab ov e acts on this fr ame, and A sp ecifies sadd le resolutions to p erform. Eac h resolution increases the complexit y of Σ by one. When the enti re braid isotopy h as acted, further resolutions are p erformed until the curv es in the resulting frame ma y b e paired with the lo w er crossingless matc h to create simple closed curv es. These cu rv es are capp ed off using death mo v es, eac h of wh ic h decreases the complexity of Σ by one. Ultima tely the Euler c haracteristic of the sur face constructed is equ al to the num b er of d eath mo v es p erfomed minus the num b er of saddle resolutions. 3 Figure 3: Left: Ad d ing or subtracting an in n ermost simple close d curv e corresp ond s to a ze ro-hand le or tw o-handle addition in the s urface Σ. Right: Resolution along an arc connecting compatibly- orien ted c u r v es co rr esp onds to a saddle in Σ. 2.2 The algorithm A The algo rithm A consists of the precise instructions for whic h saddle resolutions to p erf orm , toget her with an end-state algorithm whic h ev en tually p ermits the curves in some frame to b e glued to the lo w er brid ges and capp ed off. This section describ es the resolutions p erformed while the isotop y acts, deferring t he end-state algorithm to Sect ion 2.4. The reader ma y also find it helpful to lo ok at the exa mp les in Secti on 2.3. There are sev er al definitions which will b e con v enient for describing A : Definition 3. Two cur v es in a crossingless matc h are stacke d if the endp oint s of one curv e are b et wee n the endp oints of the other. The latter curv e is the o uter curv e, and the form er, the inner curv e. In Figure 1, the three crossingless m atches on the righ t ha v e stac ks. In general, a frame will consist of n cur v es with colinear endp oin ts, b ut it will not b e a c rossin gless matc h. Definition 4. An e nd p oint of a curv e is obstr ucted if s ome curv e in th e frame passes b eneath it. Note that a fr ame with no obstru ctions is an upp er crossingless matc h. W e will also d istinguish b et wee n dir e ct and indir e ct obs truction: an endp oin t is directly obstructed b y the curv e immedi- ately b elo w it, and ind irectly obstructed by an y curv es b elo w that. The obstruction numb er of a frame is the s um ov er the endp oin ts of the n umb er of curve s b elo w eac h p oint . Definition 5. A cu r v e connecting t wo p oin ts in a frame is critic al if it is not isotopic, in the complemen t of the 2 n endp oin ts, to a curve with no v ertical tangen t line. A fr ame is critic al if any of its constituent curves are critical. In a neigh b orho o d of t h e up p er bridges, the surf ace lo oks lik e the pr o duct o f the upp er cross- ingless matc h with an in terv al, so F − 1 (1 − ǫ ) is a cop y of this c rossin gless matc h. Note that these curv es in herit a transv erse orientat ion from the link. If the actio n of the first elemen tary isotop y b i on F − 1 (1 − ǫ ) creates a frame with an ob s truction, iden tify a saddle resolution to eliminate it as ind icated in Figure 4 . The obstru ction arcs sho wn there indicate r esolutions consisten t w ith the orien tations of the curves, ensuring that th e resu lting surface will b e orien table. Once th e obstruction arc is iden tified, let th e next elemen tary br aid isotop y act on the decorate d diagram and add new obstruction arcs if direct obstru ctions are created. If a curve ceases to directly obstruct a particular endp oint, remov e th e c orresp onding resolution arc. Con tinue decorating the 4 Figure 4: In eac h figure, the thin line indicates an a rc whose resolution r emo v es the obstruction. diagram with obs tr uction arcs and letting th e isotop y act u n til a frame b ecomes critical. When this happ ens , resolve the obstruction arcs whic h in dicate obstru ctions b y th e critical curv e(s). Once these are resolv ed, it ma y be necessary to add add itional obstruction arcs so that all obstructions are marked. If the frame had in direct obstructions, some cu rv es may still b e critical and the iredecorate/resol ve pro cess might need to b e rep eated. Once the frame b ecomes non-critical and all obstructions are m ark ed with app r opriate arcs, let the next elementa ry isotopy act. Rep eat this pro cess until the br aid-ind uced isotop y is exhausted. If the fin al frame is a crossin gless matc h, glue the endp oin ts to the corresp onding p oints of the lo we r br idges and remov e the simple closed curve s. If the fi nal frame is obstructed, apply th e end-state algorithm describ ed in Section 2.4 b efore gluin g to the lo wer bridges. 2.3 Examples This section co ntai n s t wo examples o f minimal complexit y surfaces constructed u sing A . The first example (Figure 5) sho ws A applied to a family of kn ots whose mem b ers are distinguished b y a t wist parameter. T his family w as studied by Koba yashi, Koba y ashi, and Ka wa uchi, who show ed that wh en n 6 = 0 , 12, the knot has g ( K ) < g c ( K ). [KK96], [K aw94] The second example (Figure 6) is a knot stud ied b y Alford, w ho sho we d that it has t wo minimal complexit y su rfaces with non-homeomorphic complemen ts ([Alf70 ]). The c hoice imp osed b y A to mak e F − 1 (1 − ǫ ) agree with the up p er crossingless matc h determines the surface s h o wn here. O ne ma y repr esen t any S eifert surface via a sequence of frames, how ev er, so we note that Alford’s other Seifert sur face w ould hav e an initial frame in wh ich additional simple closed curves en close comp onent s of the crossingless matc h. 2.4 End-state algorithm In order to pro duce a Seifert su rface for the link L , th e fin al frame m ust b e glued to the lo w er bridges and the resu lting simple closed curv es capp ed off w ith tw o-handles. This gluin g op eration is alw a ys p ossible if th e final frame is a crossingless matc h. The final ingredien t in A is an algorithm for resolving a n arbitrary non-critical frame to a crossin gless matc h . Definition 6. Two curv es are par al l el if no p art of another cur v e comes betw een them. Definition 7. An unstacking ar c is a resolution arc lying b et ween and connecting tw o parallel curv es with opp osite transverse orien tations. 5 Figure 5: The b ox represen ts n fu ll t wists, where n 6 = 0 , 12, a nd the surface shown realizes g ( K ). 6 Figure 6: A applied to a kn ot with t wo minimal complexit y surfaces. Th e n umbers on the knot diagram ind icate the order in whic h the corresp onding c rossin gs app ear in the braid word u sed in the constru ction. 7 The algorithm to c hange an arbitrary non-critical frame into a crossingless matc h is depicted in (1). E v ery resolution step either redu ces the obstruction n umber of the fr ame or sh ortens the total length of the curv es, so the algo rithm must terminate in fin ite time. Once the frame has b een trans f ormed into a crossingless matc h, the curves are glued to th e lo wer br idges of the link pro jection and the resulting simp le closed curves capp ed off with t wo-handles. I. Are there any indirectly obstructed endp oin ts? ✑ ✑ ✑ ✑ ✰ ◗ ◗ ◗ ◗ s Is a single p oin t obstructed b y curve s with opp osite co-orien tations? ✑ ✑ ✑ ✑ ✰ ◗ ◗ ◗ ◗ s Resolv e a ll arcs ❄ CM I I. Is there a pair of parallel obstructing curves with opp osite co-orien tations? ✑ ✑ ✑ ✰ ◗ ◗ ◗ ◗ s Resolv e a ll arcs ❄ ∃ obstru ctions? ✑ ✑ ✑ ✑ ✰ ◗ ◗ ◗ ◗ s Relab el & return to I CM Pic k a b ottommost pair o f o bs tr ucting curv es and resolv e all. arcs fr om the lo wer curve. ❄ Return to II. Resolv e the unstac king arc ❄ ∃ obstru ctions? ✑ ✑ ✑ ✰ ◗ ◗ ◗ ◗ s Relab el & return to I CM All“Y es” b r anc hes are to the left, and all “ No” branc hes to the r igh t. T he end − state al g or ithm (1) 3 A Morse v ersion of Seifert’s algorithm In order to pro ve the minimal complexit y results claimed for A , we will compare t h e su r faces b uilt using this tec hniqu e to those built using Seifert’s algorithm. W e th us in tro d uce a v ariant of A , denoted A S , wh ic h we pro v e is equiv alent to S eifert’s algorithm. A S is similar in structure to A , but resolve s obstructions more agressiv ely . Beginning with an n -bridge pro jection, let the fi rst elemen tary isotop y act and decorate the resulting frame with obstruction arcs as in A . I mmediately resolv e all the obstruction arcs to get a (possibly differen t) crossingless matc h . Rep eat this pro cess, alw a ys resolving a fr ame to a crossingless matc h b efore letting the next elemen tary isotop y act. When the isotopy is exhausted, glue th e crossingless m atc h in the final frame to the lo w er bridges and cap o ff a ll simple closed cur v es with t w o-handles. Theorem 3. W hen A S and Seifert’s algorith m ar e applie d to the same pr oje ction, they pr o duc e isotopic surfac es. Pr o of. Fix a p r o jection and denote the surface constructed b y A S b y Σ A S . Similarly , us e Σ S A to denote the s urface constru cted b y Seifert’s algorithm. 8 Figure 7: Th e end-state algorithm app lied to a co mp licated frame. Dots indicate wh ic h resolution arcs in a give n frame are b eing resolv ed. 9 Σ A S decomp oses nat u r ally into simple subsurfac es , eac h corr esp onding to a single el ementa ry isotop y . The fir st frame in eac h simple subsurf ace is a c rossin gless matc h. The elemen tary isoto py corresp ondin g to a single br aid generator acts on this frame, and any resulting obstru ctions are remo v ed using A S . Th is lea ves a (p ossibly differen t) crossingle ss matc h for the fin al frame, whic h is also the in itial fr ame for th e next s imple su bsurf ace. Since b oth Σ A S and Σ S A are built from the same pro jection, one may c ompare the corresp onding subsur faces when Σ S A is cut at the same heigh ts on the p r o jection. Recall that a frame is the preimage of a p oin t under the heigh t Morse function from a Seifert sur face to R ; cutting Σ S A at h eigh t x th us yields a fr ame which d epicts the int ersection of a horizon tal plane with Σ S A . (Our term “stac king” arises f rom this viewp oin t, where stac k ed curv es in a frame corresp ond to concen tric Seifert cycles, and th us v ertically stac ke d Seifert discs.) A simple sub surface of Σ S A is determined b y the initial crossin gless m atc h, whic h is inherited f rom th e pr evious su bsurface, and the orienta tions of the c rossin g strand s . Up to reflection, A S distinguishes sev en t yp es of crossings based on wh ether the crossing strand s are the end p oints of stac ked (or u nstac k ed) cur v es with the same (or opp osite) transv erse orien- tations. Seifert’s algo rithm distinguish es only b et w een crossing strands with t h e same or opp osite orien tations. Figure 8 sho ws wh at eac h constructions yields in eac h of th e cases. It is imp ortan t to note that the upp er crossingless ma tch is in h erited from the subs u rface ab o v e it; in the absence of this information, th e lo wer crossingless matc h is not un iquely determined. Note that the n on- crossing strands sh o wn in the diagrams might not b e adjacen t to the crossing strands , but the isotop y t y p es of the subsurf aces are unaffected b y disjoin t Seifert d iscs or sta ck ed curves. Comparing the left and righ t columns on Figure 8, one sees that for a fixed crossing t yp e and initial crossingless mat ch, the simple su bsurf aces of Σ A S and Σ S A are isotopic. In particular, they eac h pro d uce the s ame fi nal crossin gless matc h, so the p ro of is inductive on the num b er of cuts. The base case is the top crossin gless matc h, where Σ A S and Σ S A agree, and the indu ctiv e step sho ws t h at if the tw o surfaces agree at the n th cut, they agree at the n + 1 th cut as w ell. 4 Pro of of Theorem 1 F or an alternating pro jection, w e claim that A bu ilds s u rfaces of the same complexit y as do es A S . Theorem 3 establishes that Σ A S and Σ S A are isotopic, and Seifert’s algorithm is kno wn to constru ct a minimal c omplexit y surface from an y alternating pro jection. Lemma 1. In an alternat ing pr oje ction, no obstruction wil l vanish under the action of the br aid isotopy. Th u s , once an endp oin t in a frame is obstructed, some resolution w ill b e required to remo v e this obstruction. Pr o of of L emma 1. Beginnin g with a n on -critical frame, a non-critical obstruction o ccurs when th e righ t (resp ectiv ely , left) endp oint of a curv e passes in f ron t of the adjacen t endp oin t to its left, (righ t). Without loss of generalit y , consider the first case. Number the p oints from left to right, so that p i passes in fron t of p i +1 in the situation describ ed. In order f or this obstruction to v anish without the frame b ecoming critical, either the o ver-c rossin g endp oin t must retreat again to the left, or else the en tire curv e obstru cting curve m ust pass in front of p k +1 . In an alternating pro jection, neither of these is p ossib le. 10 Figure 8: Left: F rames for a simple subsur face of A S . Second column: The s ubbraid corresp onding to the simple subsu rface. T hird column: Seifert’s algorithm resolv es eac h crossin g according to the orien tation o f the b raid strands and glues in a t wisted band. F ourth and fifth column s: Sc hematic and pictorial illustrations of the simple subsurf aces of Σ S A . 11 Figure 9: A complete collect ion of the n on-critical frames wh ich can evolv e f r om a crossingless matc h o n six p oints u nder the ac tion of a b r aid in vo lving the generators b − 1 1 , b 2 , b − 1 3 , b 4 , and b − 1 5 . An a lternating braid has the prop ert y t hat eac h generator ma y app ear in the b r aid wo rd with exactly one sign. F ur thermore, if b i and b i +1 eac h o ccur in the b raid w ord (with some sign) at least once, then in fact they m ust occur with opp osite signs. The o ve r-crossin g of the r igh t en dp oint p i corresp onds to b − 1 i , and since b i do esn’t app ear in the braid w ord , the only wa y to remo v e the obstruction is for the en tire curv e b ounded b y p i to mo v e to the righ t of p i +1 . (Note that we a re retaining the labels o n the p oints d ictated by their p ositions when the obstru ction first o ccur r ed.) The condition that neigh b oring braid generators alternate in sign restricts the kind of frames that can ev olve fr om a crossingless matc h via the braid isotop y . I f an elemen tary isotop y switc hes the endp oints of a single curv e, the transverse orienta tion c hanges, but the (unorien ted) crossingless matc h remains th e same. An y other elementa ry isotop y , ho w eve r, has the prop erty that wh en it acts twice, the frame b ecomes criti cal. Thus, disregarding orien tation, there is only a small list of frames that may o ccur b efore an y fur ther elemen tary isotopies make the frame critical. See Figure 9 for an example of the frames wh ic h ma y o ccur when n = 3; the distinctive w a ve-l ike app earance of suc h fr ames mak es it easy to ident ify whether a g iven frame is in this set even for large n . I f a single elemen tary isotop y renders one of these frames critical, the resolution(s) p erformed under A returns a frame from this list. Thus, in the course of app lyin g A to an alternating p ro jection, t he only non-critical frames whic h o ccur are in fact frames that could hav e come fr om some crossingless matc h without the frame first b ecoming critical. One consequence of this argument is that there are no indirect obstru ctions in non-critical frames. T his constraint allo ws us to sh o w that the left endp oin t, p k , of the curve obstructing p i +1 cannot pass in fron t of p i +1 without making a critica l frame. First, note that p i +1 cannot mo v e further to the left; since b − 1 i app ears in the braid word, b i − 1 ma y as well, b u t the corresp ondin g isotop y p asses p i − 1 b ehind p i +1 . When p i +1 is the left endp oin t of a curve, this c reates an ind irect obstruction of p i − 1 b y th e curv e b ounded by p i and p k . When p i +1 is the r igh t endp oin t of a cu rv e, the argument ab o v e restricts this curv e to passing ab ov e p i − 1 , and the elemen tary isotopy b i − 1 mak es t he frame critical. (See Figure 10.) With the position of p i +1 fixed, note that for p k to b ecome adjacent to p i +1 without the fr ame b ecoming critical requires p k to mo v e alternately in front of and b ehind the p oin ts separating it from p i +1 . R equ iring suc h crossin gs to preserv e the n on -criticalit y of the frame forces the cur ve connecting p k and p i to s nak e alte rn ately o ver and under the separating p oints. Th is implies that i − k ≤ 3, for if the curve passes under a point, o ve r a p oint , and un der a second p oin t, the curve b ound ed b y th e middle p oint indir ectly obstru cts one of the lateral ones. (See Figure 11). F or eac h of the cases when i − k ≤ 3, how ev er, studying the p ossible fr ames dir ectly sho ws that p k could only pass b ehind p i +1 . Lemma 2. If P is an alternating pr oje ction of a link, then the c omplexity of Σ A agr e es with that 12 Figure 10: L eft: If p i +1 is a left endp oin t, b i − 1 creates an ind irect obstruction. C enter left: If p i +1 is a r ight endp oin t of a curve , b i − 1 mak es th e frame critical. Cen ter righ t: p i +1 cannot b e the right endp oint of a curve creating an indirect obstruction. Righ t: Since b − 1 i − 1 do es not ap p ear in the braid w ord, t his frame cannot h a v e ev olve d fr om a crossingless mat ch. Figure 11: A curve passing alternately o ver and under endp oints will necessarily create ind irect obstruction if its endp oin ts are separated b y at least three p oints. of Σ A S . Pr o of of L emma 2. T he p ro of rests on a pro cess w h ic h in terp olates b etw een A S and A to build a surface whose Euler c haracteristic agrees with b oth Σ A and Σ A S . Beginnin g with a crossingless matc h, let the br aid isotopy act on the in itial frame. Decorate the resu lting f rame w ith obstr u ction arcs as if applying A S . By h yp othesis and Lemma 1, once an obstruction arc app ears on the diagram, it cannot v anish u nder isotopy alone. Con tinue the isotop y/decoration pr o cess u ntil applying the next elemen tary isotop y w ould create a critical frame. Be fore letting this isotop y act, first resolv e an y obstruction arcs such that the obstru cting curv e would b ecome critical in the next frame. Comparing this fr ame to the corresp onding frame h ad we applied A S , note that ev ery resolution p erformed u nder A S corresp onds either to an obstruction arc still on the frame or an obstruction arc that w as just resolv ed. Now apply the n ext element ary isotopy and consider the resulting frame. If it is non-critical, pro ceed as a b o v e with the isotop y/decoration pr o cess. If the frame is critical, then a n ew obstr uction w as creat ed b y a no w -critical curv e, and b oth A S and A require its resolution. (F or example, consider either of the b ottom frames in Figure 4.) Rep eat th is pro cedure un til th e br aid isotop y is exhau s ted. Eve ry obstruction arc added to the diagram wa s resolv ed to p rev ent a critical frame, resolv ed t o remo v e a criticalit y , or remains on the diagram. Note that applying A to a n alternating pr o jection creates no fr ames with in d irect obstru ction. Th u s , the end-state algorithm in th is case consists simply of r esolving every arc on the frame, as if applying A S . This completes a surface w hose complexit y agrees with that of Σ A S , sin ce the same set of arcs w ere resolve d to giv e th e same crossingless matc h. Similarly , the surface is isotopic to Σ A since the t wo sur faces d iffer only by the order of the elemen ts in element ary iso topy/reso lution pairs. 5 Pro of of Theorem 2 The pr o of of Th eorem 2 is s im ilar to that of T heorem 1 in the sense th at the argumen t again relies on comparing A to A S . Ho wev er, w e use sutured manif old theory to show that Σ A S realizes the 13 gen us of the link. Th is resu lt encompasses the kno wn statemen t that Seifert’s algorithm builds minimal complexit y surfaces for positive braids. 5.1 χ (Σ A S ) = χ (Σ A ) Lemma 3. L et L b e the closur e of a b r aid w ith the pr op erty that e ach br aid gener ator app e ars with only one sign. The surfac es Σ A S and Σ A have the sa me c omplexity. Pr o of. Lemma 1 states th at for alternating p ro jections, obstructions can b e remo ve d only by resolu- tion. Ho w eve r, with minor mo dification, the lemma m a y b e extended to br aids of th e t yp e co vered b y T heorem 2. These braids are charact erized by the prop ert y that eac h braid group generator app ears w ith only a single s ign in the braid word; th us, r emo ving an obstr uction withou t resolution requires the ent ire obstructing curv e to pass in fron t of the obstructed p oin t. F or a closed braid pro jection this is imp ossible, as the righ t endp oints of the curves are all fix ed . This establishes the analogue of L emma 1 for the braids of Theorem 2. Lemma 2 also adapts to th ese braids. Th e pro of is id entical in this case u n til the end-state algorithm is app lied. Although frames with ind irect obstruction ma y o ccur wh en A is applied to these pro jections, any tw o curves obstructing the same end p oint ha v e the same co-orien tation. Therefore the end-state algorithm r esolv es all o bs truction arcs sim ultaneously . It is w orth noting th at th e absence of un s tac king arcs is necessary: in general, resolving a single unstac king arc may remov e m ore than one obstru ction, so resolving all obstruction arcs in that case could yield a surface with greater complexit y than that of Σ A S . (This is illustrated by the first r esolution in Figure 7.) 5.2 Sutured manifold theory Sutured manifold theory , d ev elop ed by Gabai, is a useful tool for studying minimal complexit y surfaces. This section collects some b asic r esults, and we refer the reader to [Gab83] f or more details. Definition 8. A sutur e d manifold ( M , γ ) is a compact, orien ted three-manifold with a collect ion of distinguished annuli an d tori in its b ound ary . F urthermore, eac h annular comp onen t of γ is equipp ed w ith an orien ted core core curve s ( γ ) known as the sutur e . Definition 9. If ( M , γ ) is a sutured manifold, let R ( γ ) = ∂ M − γ . Comp onents of R ( γ ) are coheren tly tr an s v ersely-orien ted in the sense that the b ound ary of eac h comp onent of R ( γ ) represents the same homology class in H 1 ( γ ) as some sutu re. Cutting a s utured manifold along an orien ted surf ace ( S, ∂ S ) embedd ed in ( M , γ ) giv es rise to a canonical γ ′ on the cut manifold M ′ . In particular, the new comp onen ts of R ( γ ′ ) inherit their orie ntati ons from that of S , and new sutures arise where o pp ositely-orien ted co mp onent s o f R ( γ ′ ) meet. Definition 10. A su tured man if old ( M , γ ) is taut if M is irreducible and R ( γ ) is norm-minimizing in H 2 ( M , γ ). Lemma 4 ([Gab83], Lemma 3.12) . L et ( M , γ ) → ( M ′ , γ ′ ) b e a de c omp osition along a disc J such that | J ∩ s ( γ ) | = 2 . Then ( M , γ ) is taut if a nd only if ( M ′ , γ ′ ) is ta ut. 14 Figure 12: T op: A negativ e crossing. Bottom: A p ositiv e crossing. The r ighthand fi gures sho w t wo three-balls connected b y a one-hand le, with the sutures indicated b y the d ark er lines. Figure 13: T wo h andles corresp onding to crossings of the same sign defi n e a natural decomp osition disc. One may view a Seifert surface Σ f or a link as a prop erly em b edd ed sur face in the link com- plemen t. Cutting the link complement along this surface in duces a sutured manifold structure where the tw o copies o f Σ b ecome the comp onents of R ( γ ). The b oun dary of the neigh b orho o d of eac h link comp onent b ecomes an ann ulus in the cu t manifold, and the cores of these ann uli are the sutures. In this setting, sho wing that the original surface Σ was of min imal complexit y is equ iv alen t to showing the sutur ed manifold is taut. 5.3 A S pro duces taut sutured manifolds Pr o of of The or em 2. T o show that A S is a m inimal complexit y su rface, consider the su tu red mani- fold M pro du ced by cutting the link complemen t along A S . Sp ecifically , we study the complemen- tary sutured manifold, M c , whic h is a pro d uct n eighb orh o o d of A S with the same sutures as M . A disc deco mp osition in M is equiv alen t to gluing a t wo hand le to M c . If there w ere no crossings in the braid, ev ery frame of A S w ould consist of a single stac k of n curv es, so M c w ould c onsist of n b alls, eac h with a single simple c losed curv e su ture. E ac h saddle resolution in A S in tro du ces a one-handle connecting t w o of these balls, and these are sho wn in Figure 12. Note that the d irection the sutu res r otate around the one-handle is dictated b y whether the corrsep onding crossing in the braid is p ositiv e and negativ e. W e th us distinguish b etw een p ositiv e o n e-hand les and negat ive one-handles. 15 Figure 14: The suture ma y b e isotop ed off the ball corresp onding to the in nermost stac k ed curve, and the b all itself c an b e collapsed into its n eigh b or. The innermost curve in the sta ck corresp onds to the front sutured ball, and the condition that eac h b raid generator app ears with a unique sign implies th at all the hand les connecting this ball to the next on hav e the same s ign. Any pair of o ne-hand les of th e same type connecting the same sutured balls defin es a natural disc in the surf ace complemen t. (See Figure 13.) Decomposin g along this disc replaces the pair with a single one-handle of the same sign. Rep eating this as necessary reduces the n umb er of one-handles unti l the fr on t ball is connected to its neigh b or b y a single handle. The sutur e enters the ball along this one-hand le, run s aroun d the ball once, and exits through the hand le again. The suture can thus b e isotop ed off the front ball and onto the next one, and the front ball itself collapsed along the one-handle s o that ball that w as originally second is n o w the front b all. (See Figure 14.) The pro cess ma y b e rep eated un til the original su tured manifold is r educed t o a s in gle b all w ith a single c onn ected suture. Sin ce the complemen t of a ball in S 3 is another b all, this p ro v es that M is ta ut and the original surface A S had minimal c omplexit y . 6 Extension of Seifert’s algorithm to arbitrary classes The relativ e second homology of the complement of a knot has rank one, so an y Seifert sur face for K generates H 2 ( S 3 − K, ∂ ( S 3 − K )). When | L | > 1, ho wev er, the s itu ation is more interesting, as the num b er of link comp onent s giv es the rank of the second homology . T o an y fixed second homology class σ ∈ H 2 ( S 3 − L, ∂ ( S 3 − L )) one ma y asso ciate the the minimal complexit y of an em b edd ed s u rface represen ting σ . Th ur ston first stud ied this family of inv ariants, and recen t w ork of Ozsv` ath, Szab` o, and Ni h as sho wn that the Heegaard Flo er link in v arian t can b e used to compute these min im al c omplexities. ([Thu86], [OS06], [Ni]) This pap er has b een primarily concerned with constructing surfaces represent ing the Seifert cla ss in th e s econd homology , but the tec hniques may b e extended to constructing surf aces representing arbitrary second homology classes as w ell. In p articular, A S ma y be e xtended to suc h an end. Fix some σ ∈ H 2 ( S 3 − L, ∂ ( S 3 − L )) by lab eling eac h link comp onen t L i with an intege r n i . As b efore, b egin with an n -bridge pro jection of a link, but instead of a single curve, connect pairs of p oin ts b y n i parallel curv es. Alternately , a sin gle cur v e ma y b e dra wn and lab eled with its m ultiplicit y; c han ging the transv erse orient ation if necessary allo ws us to assume all n i are nonnegativ e. This frame is a generalization of a crossin gless m atch in the sense that n o p oin ts are obstru cted. No te that this frame ma y include isolated p oin ts if an y of th e n i is zero. As the 16 Figure 15: The figures on the left depict multic u r v e obstructions, and the cen ter and righ t columns sho w the result of resolving sufficien t direct obstructions to y ield a generalized crossingless matc h. I n eac h case the num b er of resolutions needed is equal to th e m ultiplicit y of th e obstructing multicurv e. Note that if n = m = 1, these diagrams agree with those of Figure 4. braid-indu ced isotop y acts on this fr ame, again decorate the r esu lt with obstru ction arcs. Any obstruction by a curve with n i > 0 necessarily creates indirect as w ell as direct obstru ctions, so simply resolving a single arc will n ot return a generalize d crossingless m atc h. Figure 15 indicates th e num b er of resolutions and the r esulting frames in vol ved in remo ving m ulticurve obstructions. Eac h of these is derive d from rep eated application of the resolutions sh o wn in Figure 4. Ad ditionally , one must mak e sen se of obstructed p oin ts whic h are n ot the endp oin ts of an y c ur v e. Passing a curve across suc h a p oin t corresp onds to p uncturing Σ A S b y a c omp onen t of the link with n i = 0, so eac h p uncture increases th e complexit y by one. With these to ols in hand, one ma y pr o ceed a s in A S , resolving eac h frame to remo v e all obstru ctions b efore allo w in g the next elemen tary isotop y to act. Once the isotop y has b een exhausted, join th e generalized crossingless matc h to the lo w er generalized crossingless match of the lin k p r o jection and cap the resulting simple close d curv es with t w o-handles. This generalization of Seifert’s al gorithm offers a straigh tforward method for constructing sur - faces representing arbitrary homology classes, and for computing their complexit y . The author 17 is n ot a ware of an y alternating pro jections for which this pr o cess fails to construct a minimal- complexit y surface, a nd w e sp eculate that suc h surfaces might b e of minimal c omplexity f or some large class of pro jections. 7 Conclusion One ma y try , b ey ond the results of Theorems 1 and 2, to c haracterize th e links for wh ich Σ A realizes the link gen us. In [Mor87], Moriah used t wisted Whitehead d ou b les to sho w that the difference b etw een the gen us and the canonical genus of a knot may b e made arbitrarily large. (In fact, h e sho w ed this difference for gen us and fr ee genus, which is a lo wer b oun d for canonical gen us.) Th e tw o examples of Section 2.3 are b oth doubles, although this term is u sed lo osely in the case of Alford’s knot b ecause of the unusual clasp. W e n ote also an example of Ly on whic h fir st established the existence of knots w ith n o incompressib le free Seifert surfaces [Lyo7 2 ]. Although Ly on’s knot (*** *) is not a d ou b le, applyin g A to a bridge pro jection r eco v ers the incompressible, rather than th e free, surf ace. In eac h of these cases, the m inimal complexit y surfaces are comp osed of a r elativ ely small num b er of highly t wisted and knotted b an d s. W e suggest that A is particularly w ell-suited to constructing su c h surfaces, whereas Seifert’s algorithm is not. It would b e interesting to fi nd a more precise classificat ion of the t yp e of knot for wh ic h these are th e minimal complexit y Seifert su rfaces. Ev en when A d o es n ot pro duce a minimal complexit y surface, the tec h n ique of co nstr ucting a Seifert surface via a sequence of Morse slices may still b e useful. In [Lic], the author constructs minimal complexit y surfaces in pretzel link complemen ts by p erforming resolutions differen t from those suggested by A . Thus, a secondary goal of this pap er is to in tro du ce a flexib le technique that ma y be useful in a wide v ariet y of situations. References [Alf70] W. R. Alford. Complemen ts of minimal spann ing surfaces of knots are not u nique. Ann. of Math. (2) , 91:41 9–424, 1970. [Gab83] Da vid Gabai. F oliations and the top ology of 3-manifolds. J. Diff er ential Ge om. , 18(3 ):445– 503, 1983. [Ka w94] Akio K a w auchi. On co efficien t p olynomials of the sk ein p olynomial of an orien ted link. Kob e J. Math. , 11(1):49–6 8, 199 4. [KK96] Masak o Koba y ashi and Tsuyoshi Koba ya shi. On canonical gen us and free genus of knot. J. Knot Th e ory R amific ations , 5(1 ):77–85, 1996. [Lic] J. Licata. The Th ur ston polytop e for four-stranded pretzel links. math.GT/06094 66, to app ear in Alg ebr aic and Geo metic T op ology . [Ly o72] Herb ert C. Lyon. K n ots without u n knotted incompressib le spanning surfaces. Pr o c. Amer. Math. So c. , 3 5:617–620 , 1972 . [Mil63] J. Milnor. M orse the ory . Based on lecture notes by M. Spiv ak and R. W ells. An nals of Mathematics Studies, No. 51. Prin ceton Univ ersit y P ress, Pr inceton, N.J., 1963. 18 [Mor87] Y oa v Moriah. On the fr ee gen us of knots. Pr o c. Amer. M ath. So c. , 99 (2):373–37 9, 1987. [Ni] Y. Ni. Link Flo er homolo gy detec ts the Thurston norm. math.GT/0604360 . [OS06] P . S. Ozsv´ ath and Z. Szab´ o. Link Flo er homology and th e Thurston norm. math.GT/0601 618, 2006. [Th u86] William P . Thurston. A norm for the homology of 3-manifolds. Mem. Amer. M ath. So c. , 59(33 9):i–vi and 99–130, 1986 . 19
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment