Cumulative and Averaging Fission of Beliefs
Belief fusion is the principle of combining separate beliefs or bodies of evidence originating from different sources. Depending on the situation to be modelled, different belief fusion methods can be applied. Cumulative and averaging belief fusion i…
Authors: Audun Josang
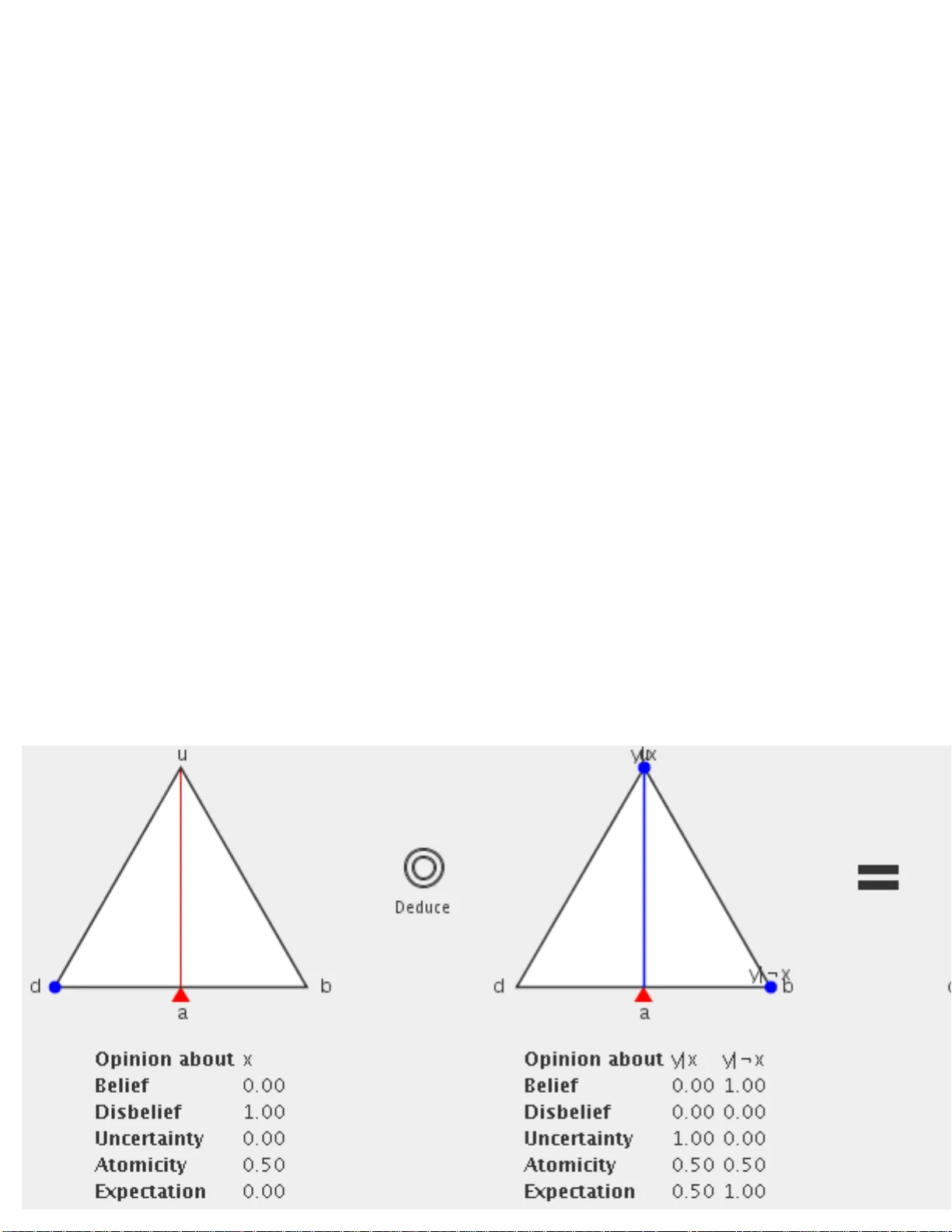
Cumulativ e and A veraging Fission of Beliefs A udun J øsang UniK, Univ ersit y of Oslo Norway josang @ unik .no Abstract Belief fusion is the princi ple of com- bining separa te beliefs or bodies of e vidence origin ating from dif ferent source s. Dependin g on the situation to be modelled , differ ent belief fusion methods can be applied. Cumulati v e and a vera ging belief fusion is defined for fusing opini ons i n subjecti v e lo gic, and fo r fus ing belief fun ctions in gen- eral. The pri nciple of fi ssion is the oppos ite of fusion, namely to elimi- nate the con trib ution of a specific be - lief fro m an already fused be lief, w ith the purpose of derivi ng the remainin g belief. This paper describes fissi on of cumulati v e belie f as well as fission of av eraging b elief in subjec ti ve logi c. These operato rs can for exa mple be ap- plied t o belief re vision in Bayesian be- lief network s, where the belief contri- b ution of a gi v en evi dence source can be determine d as a f unction of a giv en fused beli ef and its other contr ib uting beliefs . Ke ywords: Fusio n, fission , sub jecti ve logic, belief , uncertai nty 1 Intr oduction Subjecti v e logic is a type of probabilis tic lo gic that expl icitly takes uncerta inty and belie f own- ership in to ac count. In genera l, subje cti ve logi c is suitabl e f or modeling and analysin g situat ions in v o lving uncertainty and inco mplete kno wledge [1, 2]. For example, it can be used for m odelin g trust netwo rks [6] an d f or analysi ng Bayesian net- works [5]. Arg uments in s ubjecti v e logic are su bjecti v e op in- ions ab out pro positio ns. The opinion spac e is a subset of the belief func tion space used in Dempster -Shafer belief theory . The term be- lief will be used interch angeab ly with opinio ns throug hout this paper . A binomial opinion ap- plies to a singl e propositio n, and can be rep- resent ed as a Beta distrib utio n. A m ultino mial opinio n applie s to a collection of propos itions, and ca n be represent ed as a Dirichlet di strib u- tion. Through the co rrespond ence between op in- ions and Beta/Dirichlet distr ib utions, sub jecti v e logic prov ides an algebra for these functions . The two types of fusion defined for subjecti ve logic a re cumul ative fusio n and avera ging fusio n [4]. Situations that can be m odelle d with th e cu- mulati v e operator are for exampl e when fusing beliefs of two observers w ho hav e assessed sepa- rate a nd ind epende nt eviden ce, such as when t hey ha ve obse rved the out comes of a gi ve n process ov er two separate non-ov erlapp ing time periods. Situation s that can be modelled with the av erag - ing operator are for e xample when fu sing bel iefs of two observ ers who hav e assess ed the same ev- idence and possib ly interpre ted it diff erently . Dempster’ s rule also represen ts a method com- monly applied for fusing beliefs. Ho wev er , it is not used in subjecti ve logic and w ill not be dis- cussed here. There are situatio ns where it is useful to split a fused b elief in its contrib uting belief compo nents, and this process is called belief fi ssion. This re- quires the already fused belief and one of its con- trib uting belie f componen ts a s input , and will pro- duce the remainin g co ntrib uting beli ef componen t as output. Fission is basically th e opposite of fu- sion, a nd the formal expres sions for fission can be deri ved by re arrangi ng the exp ression s for fu sion. This will be descri bed in the follo wing sections. 2 Fundamentals of Subjecti ve Logic Subjecti ve opinion s exp ress subjec tiv e beliefs about the truth of proposi tions with degrees of un- certain ty , and ca n indicate sub jecti ve be lief o wn- ership when ev er require d. An opinion is usu ally denote d as ω A x where A is the subje ct, also called the belief o wner , and x is the propos ition to which the opinion applies . An altern ati ve notation is ω ( A : x ) . The propos ition x is assumed to be- long to a frame of di scernment (also called state space) e.g. denoted as X , b ut the frame is usually not included in the opini on notat ion. The propo- sition s of a frame are normally assumed to be ex- hausti ve and mutually dis joint, and subjec ts are assumed to hav e a common semantic interpre ta- tion of proposition s. The subject, the propositio n and its frame are attrib utes of an opinio n. Indi- cation of sub jecti ve be lief o wnershi p is normally omitted whene ver irre le va nt. 2.1 Binomia l Opinions Let x be a proposi tion. Entity A ’ s binomial opin- ion abo ut the tr uth of a x is the ordere d quadruple ω A x = ( b, d , u, a ) with the compon ents: b : belief that the proposit ion is true d : d isbelief that the propositi on is true (i.e. th e belief that the proposition is false) u : uncertai nty about the probabi lity of x (i.e. th e amount of uncommitted belief) a : base rate of x (i.e. pr obabilit y of x in the absence of belief ) These compone nts satisfy: b, d, u, a ∈ [0 , 1] (1) and b + d + u = 1 (2) The characte ristics of variou s op inion classes are listed belo w . A n opini on w here: b = 1 : is equi valen t to binary logic TRUE, d = 1 : is equi valen t to binary logic F ALSE, b + d = 1 : is equi v alent to a probability , 0 < ( b + d ) < 1 : e xpresse s uncertain ty , and b + d = 0 : is va cuous (i.e. totally uncert ain). The probabilit y expe ctation v alue of a binomial opinio n is: p ( ω x ) = b x + a x u x . (3) The expressio n of Eq.(3) is equi v alent to the pig- nistic prob ability in traditiona l belie f function theory [10], and is based on the principle tha t the belie f mass assig ned to the whole frame is split equally among the singleto ns of the frame. In Eq.(3) the base rate a x must be interpre ted in the s ense th at the relativ e proportion of single tons contai ned in x is equal to a x . Binomial op inions can be represen ted on an equi - lateral tria ngle as sho wn in Fig.1 bel ow . A point inside the triangle represent s a ( b, d, u ) triple . The b,d,u-ax es run from one edge to the opposite ver - tex indicate d by the Belief, Disbelief or Uncer - tainty label. For examp le, a str ong positiv e opin- ion is repr esented by a point to ward s the bottom right Belief verte x. The base rate, also called rel- ati ve atomicity , is sho wn as a red pointer alon g the probabil ity base line, and the probabili ty ex- pectat ion, E, is formed by projecting the opin- ion ont o the base, paralle l to the base rate pro- jector line. As an exa mple, the opinio n ω x = (0 . 4 , 0 . 1 , 0 . 5 , 0 . 6) is sho w n on the figure. x ω x 0,5 0 0 1 0,5 0,5 Disbelief 1 Belief 1 0 0 1 Uncertainty 0,5 Probability base line Projector Director E( ) ω x a Figure 1: Opinio n triang le w ith exampl e opinion Uncertain ty about probab ility values c an be in ter - preted as ignora nce, or second order uncertain ty about the first order probab ilities. In this pa- per , the term “uncertai nty” will be used in the sense of “ uncert ainty abo ut the pr obability val- ues” . A p robabil istic logic based on belief theo ry therefo re repres ents a generalisatio n of tradit ional probab ilistic logic. 2.2 Multi nomial Opinions Let X be a frame, i.e. a set of e xhausti ve and mu- tually disjoi nt proposition s x i . Entity A ’ s multi- nomial opinion o ver X is the composite fun c- tion ω A X = ( ~ b, u, ~ a ) , where ~ b is a vec tor o f b elief masses ove r th e p ropositi ons of X , u is the u ncer - tainty m ass, and ~ a is a v ector of base rate va lues ov er the propo sitions of X . These components satisfy : ~ b ( x i ) , u, ~ a ( x i ) ∈ [0 , 1] , ∀ x i ∈ X (4) u + X x i ∈ X ~ b ( x i ) = 1 (5) X x i ∈ X ~ a ( x i ) = 1 (6) V isualisin g multin omial opinions is not tri vial. T rinomial opinion s can b e visu alised as p oints in- side a triangula r pyr amid as sho wn in Fig.2, bu t the 2D aspec t of printe d p aper and computer mon- itors make this impra ctical in general. Figure 2: Opinion pyramid with example trino- mial opini on Opinions with dimension s large r than trinomial do not lend themselv es to traditional visualisa- tion. 3 Fusion of Multinomial Opinions In man y situa tions there will b e mul tiple sou rces of evid ence, and fusion can be used to combine e vidence from dif ferent sources. In order to pro vide an interpret ation of fusion in subjec ti ve logic it is useful to consi der a proces s that is observ ed by two s ensors. A dis tinction can be made between two case s. 1. The two sen sors observ e the proce ss during disjoi nt time period s. In this case the ob- serv ations are indepen dent, and it is natu ral to simply add the observ ations from the two sensor s, and the resu lting fus ion is called cu- mulative fusion . 2. The two sen sors observ e the proce ss during the same time period . In this case the ob- serv ations are dependen t, and it is natural to tak e the av erage of the observ ation s by the two senso rs, an d the resulting fusion is called aver agin g fusion . 3.1 Cumulati ve Fusion Assume a frame X co ntaining k elements. As- sume two observ ers A an d B who hav e indepen- dent opinions o ver the frame X . This ca ne for ex- ample result from having ob serv ed the ou tcomes of a process ov er two sepa rate time period s. Let the two obse rvers ’ respecti ve opinions be exp ressed as ω A X = ( ~ b A X , u A X , ~ a A X ) an d ω B X = ( ~ b B X , u B X , ~ a B X ) . The cumulati ve fusion of the se two bod ies of e vi- dence is d enoted as ω A ⋄ B X = ω A X ⊕ ω B X . The symbol “ ⋄ ” d enotes the fusion of two observ ers A and B into a single imaginary observ er den oted as A ⋄ B . The mathema tical e xpressi ons for c umu- lati ve fusion is descri bed belo w . Theor em 1 The Cumulativ e Fusion Operator Let ω A X and ω B X be opinions res pectivel y held by a gents A and B over the same fr ame X = { x i | i = 1 , · · · , k } . Let ω A ⋄ B X be the opinion suc h that: Case I: F or u A X 6 = 0 ∨ u B X 6 = 0 : b A ⋄ B x i = b A x i u B X + b B x i u A X u A X + u B X − u A X u B X u A ⋄ B X = u A X u B X u A X + u B X − u A X u B X (7) Case II: F or u A X = 0 ∧ u B X = 0 : b A ⋄ B x i = γ b A x i + (1 − γ ) b B x i u A ⋄ B X = 0 (8) wher e γ = lim u A X → 0 u B X → 0 u B X u A X + u B X Then ω A ⋄ B X is called the cumulatively fused opin- ion of ω A X and ω B X , r epr esenting the combina tion of independ ent opinions of A and B . B y u sing t he symbol ‘ ⊕ ’ to designate this belief opera tor , we define ω A ⋄ B X ≡ ω A X ⊕ ω B X . The cumulat iv e fusion operato r is equi val ent to a poster iori updati ng of D irichle t dist rib utions . Its proof and deri v ation is based on the bijecti ve mapping between multinomial opinions and and an augmente d rep resentat ion of the Dirichlet dis- trib ution [4]. It can be verified that the cumula tiv e fusion operat or is commutati ve, associati ve and non- idempote nt. In Case II of Theorem 1, the asso- ciati vity depend s on the preserv ation of rel ati ve weights of inte rmediate resu lts, which requires the additi onal weigh t var iable γ . In this case, the cumulati ve operato r is equi valen t to the weighted a vera ge of probab ilities. The cumulati ve fus ion o perator represent s a gen- eralisa tion of the consensus operat or [3, 2] which emer ges direct ly from Theor em 1 by assuming a binary frame. 3.2 A veraging Fusion Assume a frame X co ntaining k elemen ts. A s- sume two observ ers A and B who ha ve dependen t opinio ns over the frame X . This can for example result from o bservin g the outcomes of th e pr ocess ov er the same time perio ds. Let the two obse rvers ’ respecti ve opinions be exp ressed as ω A X = ( ~ b A X , u A X , ~ a A X ) an d ω B X = ( ~ b B X , u B X , ~ a B X ) . The av eraging fusion of these two bodies of ev- idence is denoted as ω A ⋄ B X = ω A X ⊕ ω B X . T he symbol “ ⋄ ” denotes the av eraging fusion of two observ ers A and B into a single imaginar y ob- serv er denoted as A ⋄ B . The mathematic al ex- pressi ons for a veraging fusion is describ ed belo w . Theor em 2 The A v eraging Fusion Operator Let ω A X and ω B X be opinions res pectivel y held by a gents A and B o ver the sa me frame X = { x i | i = 1 , · · · , k } . Let ω A ⋄ B X be the opinion suc h that: Case I: F or u A X 6 = 0 ∨ u B X 6 = 0 : b A ⋄ B x i = b A x i u B X + b B x i u A X u A X + u B X u A ⋄ B X = 2 u A X u B X u A X + u B X (9) Case II: F or u A X = 0 ∧ u B X = 0 : b A ⋄ B x i = γ b A x i + (1 − γ ) b B x i u A ⋄ B X = 0 (10) wher e γ = lim u A X → 0 u B X → 0 u B X u A X + u B X Then ω A ⋄ B X is called the avera ged op inion of ω A X and ω B X , r epr esenting the combin ation of the de- pende nt opinio ns of A a nd B . B y using the s ym- bol ‘ ⊕ ’ to designat e th is belief operato r , we define ω A ⋄ B X ≡ ω A X ⊕ ω B X . The a vera ging operator is equi v alent to av eraging the eviden ce of Dirichlet distrib ution s. Its proof deri vation is based on the bijecti ve m apping be- tween multinomial opinio ns and an augment ed repres entation of Dirichlet distrib utions [4]. It can be verified that the a verag ing fusion opera- tor is c ommutati ve and idempotent, b ut not asso- ciati ve. The a veraging fusion ope rator repres ents a gener - alisati on of the consensu s ope rator for dependent opinio ns defined in [7]. 4 Fission of Multinomial Opinions The principle of belief fission is the opposite to belief fusion. This section describe s the fi ssion operat ors correspon ding to the cumulati ve and av- eragin g fusio n ope rators described i n the pre vious sectio n. 4.1 Cumulati ve Fiss ion Assume a frame X containing k elements. As- sume two observ ers A and B who ha ve observe d the outcomes of a process ov er two separa te time period s. Assume that the observ ers beliefs hav e been cumulati vely fused into ω A ⋄ B X = ω C X = ( ~ b C X , u C X , ~ a C X ) , and assume that entity B ’ s con- trib uting opinion ω B X = ( ~ b B X , u B X , ~ a B X ) is kno wn. The cumulati ve fi ssion of these two bodies of ev - idence is denote d as ω C ⋄ B X = ω A X = ω C X ⊖ ω B X , which repres ents ent ity A ’ s contrib uting opi nion. The mathematical exp ression s f or cumulat iv e fis- sion is describ ed belo w . Theor em 3 The Cumulativ e Fission Operator Let ω C X = ω A ⋄ B X be t he cumu latively fused opin- ion of ω B X and the un known opinion ω A X ove r the fra me X = { x i | i = 1 , · · · , k } . Let ω A X = ω C ⋄ B X be the opini on such tha t: Case I: F or u C X 6 = 0 ∨ u B X 6 = 0 : b A x i = b C ⋄ B x i = b C x i u B X − b B x i u C X u B X − u C X + u B X u C X u A X = u C ⋄ B X = u B X u C X u B X − u C X + u B X u C X (11) Case II: F or u C X = 0 ∧ u B X = 0 : b A x i = b C ⋄ B x i = γ B b C x i − γ C b B x i u A X = u C ⋄ B X = 0 (12) wher e γ B = lim u C X → 0 u B X → 0 u B X u B X − u C X + u B X u C X γ C = lim u C X → 0 u B X → 0 u C X u B X − u C X + u B X u C X Then ω C ⋄ B X is called the cumulati vely fissioned opinio n of ω C X and ω B X , r epr esenting th e r esult of eliminati ng the opinion s of B fr om that of C . By using the symbo l ‘ ⊖ ’ to designate this belief op- era tor , we define ω C ⋄ B X ≡ ω C X ⊖ ω B X . Cumulati ve fission is the in ver se of cumulati ve fusion . Its proof and deri v ation is based on re - arrang ing the mathematical e xpres sions of T heo- rem 1 It can be verified tha t the cumulati ve rule is no n-commutati ve, n on-asso ciati ve and no n- idempote nt. In C ase II of Theorem 3, th e fissio n rule is equiv alent to the weighted subtrac tion of probab ilities. 4.2 A veraging Fission Assume a frame X co ntaining k elements. As- sume two observ ers A and B who ha ve observe d the same outco mes of a process over the same time perio d. Assume tha t the observ ers beliefs ha ve been a vera gely fused into ω C X = ω A ⋄ B X = ( ~ b C X , u C X , ~ a C X ) , and assume that entity B ’ s con- trib uting opinion ω B X = ( ~ b B X , u B X , ~ a B X ) is kno wn. The av eraging fission of these two bodies of ev- idence is denoted as ω A X = ω C ⋄ B X = ω C X ⊖ ω B X , which represen ts ent ity A ’ s contrib uting opi nion. The mathematical express ions for a vera ging fis- sion is describ ed belo w . Theor em 4 The A v eraging Fission Operator Let ω C X = ω A ⋄ B X be the fused aver ag e opin ion of ω B X and the un known opi nion ω A X ove r the frame X = { x i | i = 1 , · · · , k } . Let ω A X = ω C ⋄ B X be the opinio n suc h that: Case I: F or u C X 6 = 0 ∨ u B X 6 = 0 : b A x i = b C ⋄ B x i = 2 b C x i u B X − b B x i u C X 2 u B X − u C X u A X = u C ⋄ B X = u B X u C X 2 u B X − u C X (13) Case II: F or u C X = 0 ∧ u B X = 0 : b A x i = b C ⋄ B x i = γ B b C x i − γ C b B x i u A X = u C ⋄ B X = 0 (14) wher e γ B = lim u C X → 0 u B X → 0 2 u B X 2 u B X − u C X γ C = lim u C X → 0 u B X → 0 u C X 2 u B X − u C X Then ω C ⋄ B X is called the aver ag e fission ed o pinion of ω C X and ω B X , r epr esenting the r esult of eliminat- ing t he o pinion s of B fr om t hat of C . By using the symbol ‘ ⊖ ’ to designate this belief opera tor , we define ω C ⋄ B X ≡ ω C X ⊖ ω B X . A veragin g fission is the in verse of av eragin g fu- sion. Its proof and deri vati on is base d on rear- rangin g the mathematica l exp ressions of T heo- rem 2 It can be verified that the a veraging fission op- erator is idempotent, non-co mmutati ve and non- associ ati ve. 5 Examples 5.1 Simple Belief Fission Assume that A has an unkno w n opinion about x . Let B ’ s opinion and the cumulati vel y fused opin- ion between A ’ s and B ’ s opinions be know as : ω A ⋄ B x = (0 . 90 , 0 . 05 , 0 . 05 , 1 2 ) ω B x = (0 . 70 , 0 . 10 , 0 . 20 , 1 2 ) and respec tiv ely . Using the cu mulati ve fission op era- tor it is possible to deri ve A ’ s opinion . This situ- ation is illustr ated in Fig.3. Figure 3: Princip le of belief fission By insertin g the opinio ns v alues into Eq.(7) the contri bu ting opinion from A can be deri ved as ω A x = (0 . 93 , 0 . 03 , 0 . 06 , 1 2 ) 5.2 I n verse Reasoning in Bayesian Networks Bayesian belief networks represent m odels of condit ional relationshi ps be tween propositio ns of interes t. Subjecti ve logic provid es operators for condit ional deductio n [8] an d con ditional abduc - tion [9] which allows reasonin g to take place in either direction along a con ditiona l edge. Fig.4 sho w s a simple Bayesian belief network where x and y are parent e vidence nodes and z is the ch ild node. Figure 4: Bayesi an network with belief fusion In order to deriv e the deduce d opin ions ω z k x and ω z k y using the deductio n operator , the opin ions ω x and ω y , as well as the condit ional opinio ns ω z | x , ω z | x , ω z | y and ω z | y are needed. Assuming that the co ntrib utions of ω z k x and ω z k y are ind e- pende nt, they can be fused with the cumula ti ve fusion operator to produc e the deriv ed opinion ω z k ( x,y ) . Belief rev ision based on the fission operator can be useful in case a very certain opinion about z has been determine d from other sources , and it is in conflict w ith the opinion der iv ed through the Bayesian netwo rk. In that ca se, the reasoni ng can be applied in the in verse directio n using the fis- sion opera tor to revis e the opin ions about x and y or about the condit ional relatio nships z | x and z | y . Opinion ownersh ip in the form of a supersc ript to the opinions is not exp ressed in this exa mple. It can be assumed that the analyst deriv es input opinio n v alues as a function of e vidence c ollected from differe nt source s. The orig in of the opin- ions are therefore implicitly repres ented as the e v- idence source s in this model. 6 Conclusion The principle of belief fusion is used in numero us applic ations. T he opposite p rinciple of belief fis- sion is less commonly used. Howe ver , there are situati ons w here fi ssion can be useful. In this pa- per we hav e describ ed the fission operators cor - respon ding to cumulati ve and av eraging fusion in subjec ti ve logic. The deriv ation of the fi ssion op- erators are based on rearrangin g the express ions for the corresp onding fusion operat ors. Refer ences [1] A. Jøsang. Artificial reason ing w ith subjec - ti ve logic. In A bhaya Nayak and Maurice Pagnu cco, ed itors, Pr oceedin gs of the 2nd Aus trali an W orkshop on Commonsense Rea- soning . Australian Computer Society , Perth, December 1997 . [2] A. Jøsang. A L ogic for Uncertai n Prob- abiliti es. Internation al Jou rnal of Unce r- tainty , Fuzzine ss and Kno wledge -Based S ys- tems , 9(3):2 79–311 , Ju ne 2001. [3] A. Jøsang. The Consen sus Operator fo r Combining B eliefs. Artificial Intellig ence J ournal , 142(1–2 ):157–1 70, October 2002. [4] A. Jøsang. Probab ilistic Logi c U nder Un- certain ty . In The Pr oceedings of Com- puting : The Austr alian Theory Symposium (CA TS2007), CRPIT V olume 65 , B allarat , Australia , January 2007. [5] A. Jøsang. Conditio nal Reasoning in Sub- jecti ve Logic ( to appe ar). J ournal of Multiple -V alu ed Logic and Sof t C omputing , 00(00 ):00–00 , 20 08. [6] A. Jøsan g, E. Gray , and M. Kinateder . Sim- plificatio n and Analysis of T ransiti ve T rust Network s. W eb Int ellig ence and Agent Sys- tems , 4(2):1 39–161 , 2006 . [7] A. Jøsang and S.J. Knapskog . A Metric for Tru sted Systems (full paper). In Pr o- ceedin gs of the 21 st National Information Systems Security Con fer ence . NSA, Octo ber 1998. [8] A. Jøsang , S. Pop e, and M. Daniel. C ondi- tional deduc tion under uncertainty . In Pr o- ceedin gs of the 8th Eur opean Confer ence on Symbolic and Quantitative Appr oaches to Reasoning with Uncertainty (E CSQAR U 2005) , 2005. [9] S imon Pope and Audun Jøsang . Analsysis of Competing Hypotheses using Subjecti ve Logic. In Pr oceed ings of the 10th Interna- tional C ommand and Contr ol Resear ch and T echn olog y Symposium (ICCRTS) . United States Department of Defense Comm and and Contro l Research Progra m (DoDC- CRP), 2005. [10] Ph. Sm ets and R. Kenn es. The tra nsfer - able belie f model. Artificial Intellig ence , 66:19 1–234, 1994. 0 1 2 3 4 5 0 0.2 0.4 0.6 0.8 1 p Probability Probability density Beta( | 1,1 ) p 0 1 2 3 4 5 0 0.2 0.4 0.6 0.8 1 Probability density Beta( | 8,2 ) p p Probability
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment