Local search heuristics: Fitness Cloud versus Fitness Landscape
This paper introduces the concept of fitness cloud as an alternative way to visualize and analyze search spaces than given by the geographic notion of fitness landscape. It is argued that the fitness cloud concept overcomes several deficiencies of th…
Authors: Philippe Collard (I3S), Sebastien Verel (I3S), Manuel Clergue (I3S)
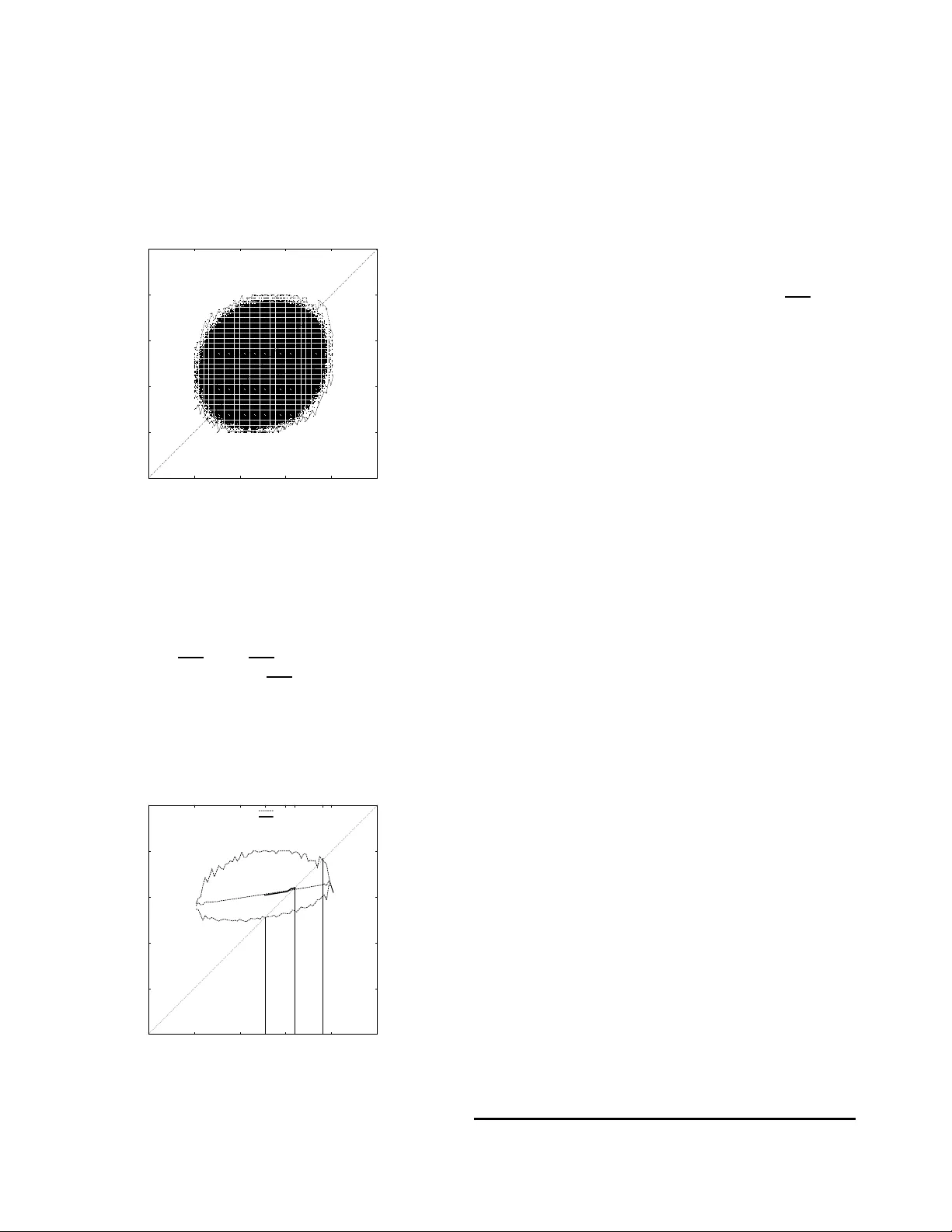
Local sear ch heuristics: Fitness Cloud ve rsus Fitness Landscape Collard Philippe and V er el S ´ ebastien and Clergue Manuel 1 Abstract. This paper introduces the concept of fitness cloud as an alternativ e way to visualize and analyze search spaces than giv en by the geographic notion of fitness landscap e. It is ar gued that the fitness cloud co ncept ov ercomes se veral deficiencies of the landscape repre- sentation. Our analysis is based on the correlation be tween fitness of solutions and fitnesses of nearest solutions ac cording to some n eigh- boring. W e focus on the beha vior of local search heuristics, such as hill climber , on the well-kno wn NK fitness landscape. In both cases the fitness vs. fitness correlation is sho wn to be related to the epistatic parameter K . Intr oduction The fitness landscape has first been introduced in 1932 by the biolo- gist Wright ([4 ]) as a metaphor for the visualization of ev olution of an optimization process. Usually , on the basis of a n -d imensional search space, an extra dimension is added which represents the fitness of each solution. So, this ( n + 1) − dimension space can be interpreted like a landscape wit h valle ys and peaks. This l andscape is more or less rough according to the complexity of the problem. Howe ver , this view of the search space presents some limitations. It is hard to visualize a search space of dimension higher than 2; the concept of neighboring, induced by a distance, an operator or an heuristic, is not easily percep tible; it is d ifficult to loca te, to count or to character- ize the set of local optima, as soon as the landscape becomes rough; barriers of fitness between basins of attraction are not alway s high- lighted and dynamics of search heuristics cannot be directl y t racked on the landscape. 1 The fitness cloud This section presents a complementary ”point of view” to the geo- graphical metaphor of landscape. The search space is noted S and the fitness function f is defined on S . 1.1 Bordering fitness T wo solutions are regarded as neighbo r if there is a transformation re- lated to sea rch heuristics or such an operator , which allows ”to pass” from one solution to the other one. Let s be a solution in the search space, its bor dering fitness ˜ f ( s ) , is defined as the fitness of a particu- lar neighbor of s . The choice of one neighbo r depends on the search heuristic only and we assume this choice to be unique. 1 Uni versity of Nice-Sophi a Antipolis, I3S Laboratory , France, email:p c@unice.fr v erel@i3s.uni ce.fr cler guem@i3s.unice .fr 1.2 Definition For each solution in t he solution space, a single point is plotted; t he abscissa is its fi tness and the ordinate is its bordering fitness. Thus, we obtain a scatterplot w hich informs about the correlation between fitness and bordering fitness (t he so-called F itness Cloud or FC). F or- mally , F C = { ( f ( x ) , ˜ f ( x )) | x ∈ S } . A set of neutrality of fit ness ϕ , so-called S ϕ , is the set of solutions that have the fitness ϕ . Such a set corresponds t o one abscissa in the fitness/fit ness plan; accord- ing to this abscissa, a vertical slice from the cloud represents all the fitness va lues one can reach fr om this set of neutrality . From a gi ven bordering fitness v alue ˜ f , an horizontal slice rep resents all the fitness v alues from which one can reach ˜ f . T o visualize the shape of the fitness cloud, we plot the three sub- sets of F C : F C min = { ( ϕ, ˜ ϕ ) | ϕ ∈ f ( S ) , ˜ ϕ = min x ∈ S ϕ ˜ f ( x ) } , F C max = { ( ϕ, ˜ ϕ ) | ϕ ∈ f ( S ) , ˜ ϕ = max x ∈ S ϕ ˜ f ( x ) } and F C mean = { ( ϕ, ˜ ϕ ) | ϕ ∈ f ( S ) , ˜ ϕ = mean x ∈ S ϕ ˜ f ( x ) } . 1.3 Evolv ability on fi tness cloud Evolvability is defined by [2] as ”the ability of random variations to sometimes produce improv ement”. There are th ree specific fitness v alues 2 (respecti vely α, β , γ ) co rresponding to the intersection of the curves (respe ctive ly F C min , F C mean and F C max ) with the diago- nal line ( ˜ f = f ). So, according to the fit ness lev el ϕ , four cases can be enumerated (see fig. 2): 1. ϕ ≤ α : bordering fi tness is always higher than fitness; applying the heuristic confers selecti ve adv antage. 2. α < ϕ ≤ β : the mean bordering fitness is higher than fitness. Thus, on av erage the heuristic is selectiv ely adv antageous. 3. β < ϕ ≤ γ : the mean bordering fitness is lo wer than fitness. Thus, on av erage the heuristic is selectiv ely deleterious. 4. γ < ϕ : bordering fi tness is always lo wer than fitness. T he heuris- tic is selectiv ely deleterious. 2 Experimental r esults on NK-landscape The search space is the set of bit-stri ng of length N = 25 . T wo strings are neighbors if their Hamming distance is one. All experi- ments are led on the same instance of NK-landscape with K = 20 . Datas are collected from an exhau stive enumeration of the search space 3 . P ractically t wo fitness values are taken as equal if they both stand in the same interv al of size 0 . 002 . 2 Existence of which depends on both the proble m and the heuristic 3 A sampling of the search also could be realiz e if it is large 2.1 Whole Fitness Cloud W e draw scatterplot, the so-called whole fit ness cloud including, for each string of t he search space, al l the points i n the hamming neigh- borhood (see fig.1). A s the density of points on the scatt erplot gives little information on dispersion, a standard de viation is plotted on both side of the mean curv e. 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 bordering fitness fitness Figure 1. The whole fitness cloud of NK-landscape with N = 25 and K = 20 : the fitness cloud ( F C ) and it shape ( F C min , F C max and F C mean with standart-de viation) under the hamming neighb orhood. The F C mean curve is roughl y a line. The fact that the F C mean curve computing on the whole scatter- plot is roughly a line (see fig.1) co nfirms the results from W ei nberg er [3]: ˜ f mean = 1 − K +1 N f + K +1 N 0 . 5 As reported by [1], let us note that the slope coef ficient 1 − K +1 N is the offspring-pa rent fit- nesses correlation. 2.2 Hill climbing A greedy hill climbing heuristic (so-called GHC) is used. 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 α 0.6 β γ 0.8 1 bordering fitness fitness Shape of the GHC Fitness Cloud Average trajectory of GHC Figure 2. The thin line is t he shape of fitness cloud ( F C min , F C max and F C mean with standart-de viati on) under GHC of NK-landsca pe with N = 25 and K = 20 . T he line is the a verage trajec tory of GHC 2.2.1 FC, local optima and epistasis A local optimum is a point in the landscape w hich i s higher than any of the points which immediately surround it. For such a point, the best possible fitness ov er its neighbourhood is less fit than it; so, its bordering fi tness is lower t han its fi tness. W ithin the cloud, local optima fit points under the diagonal line (see fig. 2). Such a localization gives insight on the amount and the fitnesses of local optima. Examining the fitness cloud, the set F C mean seems to be coarse ly supported by a line (see fig. 2). As for the whole fi tness cloud, we can prov e that F C mean is a line with the same slope of 1 − K +1 N and the Y -intercept is a constant which depends on N and K . 2.2.2 Dynamics on the F itness Cloud under GHC W e conjecture that the β fitness lev el i s a barrier of fitness . This means that, applying GHC heuristic from a rando m i nitial solu- tion, on av erage the search process breaks of f around β . T o val- idate this hypothesis we conduct a number of experiments on the NK-landscape with GHC: the sea rch heuristic is run ov er 100 gener- ations to c ollect information on the dynamics as the list of successi ve points ( f , ˜ f ) encountered during the search process. All the exper- imental datas collected from 70 such runs allo ws to build an aver- ag e trajectory . As e xpected this trajectory starts o n the F C mean line with a fit ness near to 0 . 5 4 , and t hen roughly follo ws th e F C mean line to finally breaks off around the ( β ; β ) point (see fig. 2 ). Therefore, examinin g the fitness cloud allows to predict the average long-term behav ior for GHC at fit ness le vel. Conclusion In this paper we hav e presented the F itness Cloud as a comple- mentary vie wpoint to the Fitness Landscape metaphor . FC is a 2-d representation where the topology induced by an heuristic i s directly taken into account. Our analytical and empirical results suggest that FC allows us to characterize the set of local optima and barriers of fi tness too. In others experimen ts on Simulated Annealing, we hav e established that FC can predict the barriers of fitness. In such a co ntext, we believ e the FC can be used b eneficially to track t he dynamic and t o predict the average behavior of the search process. T o change t he metaphor from landscape to cloud leads change to the picture from that of a point getting stuck on a lo- cal peak to that of a point pulled tow ards a particular set of neutrality . REFERE NCES [1] Smith, Husbands, Layzell , and O’Shea, ‘Fitness landscapes and ev olv- abili ty’, Evolutionary Computati on , 1 (10), 1–34, (2001). [2] G. P . W agner and L. Altenber g, ‘Complexe s adaptation s and the evol u- tion of e volv abilit y’, in Evolution , pp. 967–976, (1996). [3] E. D. W einber ger , ‘Correlate d and uncorrelatat ed fitness landsca pes and ho w to tell the differe nce’, in Biologic al Cybernetics , pp. 63:325–336, (1990). [4] S. Wright, ‘The roles of mutation, inbreedi ng, crossbreeding, and selec- tion in evo lution’, in P r oceedings of the Sixth International Congr ess of Genetic s 1 , pp. 356–366, (1932). 4 Fitness of a random initial solution is closed to the mean fitness over the search space ( ¯ f = 0 . 5 )
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment