Distributed Decision Through Self-Synchronizing Sensor Networks in the Presence of Propagation Delays and Asymmetric Channels
In this paper we propose and analyze a distributed algorithm for achieving globally optimal decisions, either estimation or detection, through a self-synchronization mechanism among linearly coupled integrators initialized with local measurements. We…
Authors: Gesualdo Scutari, Sergio Barbarossa, Loreto Pescosolido
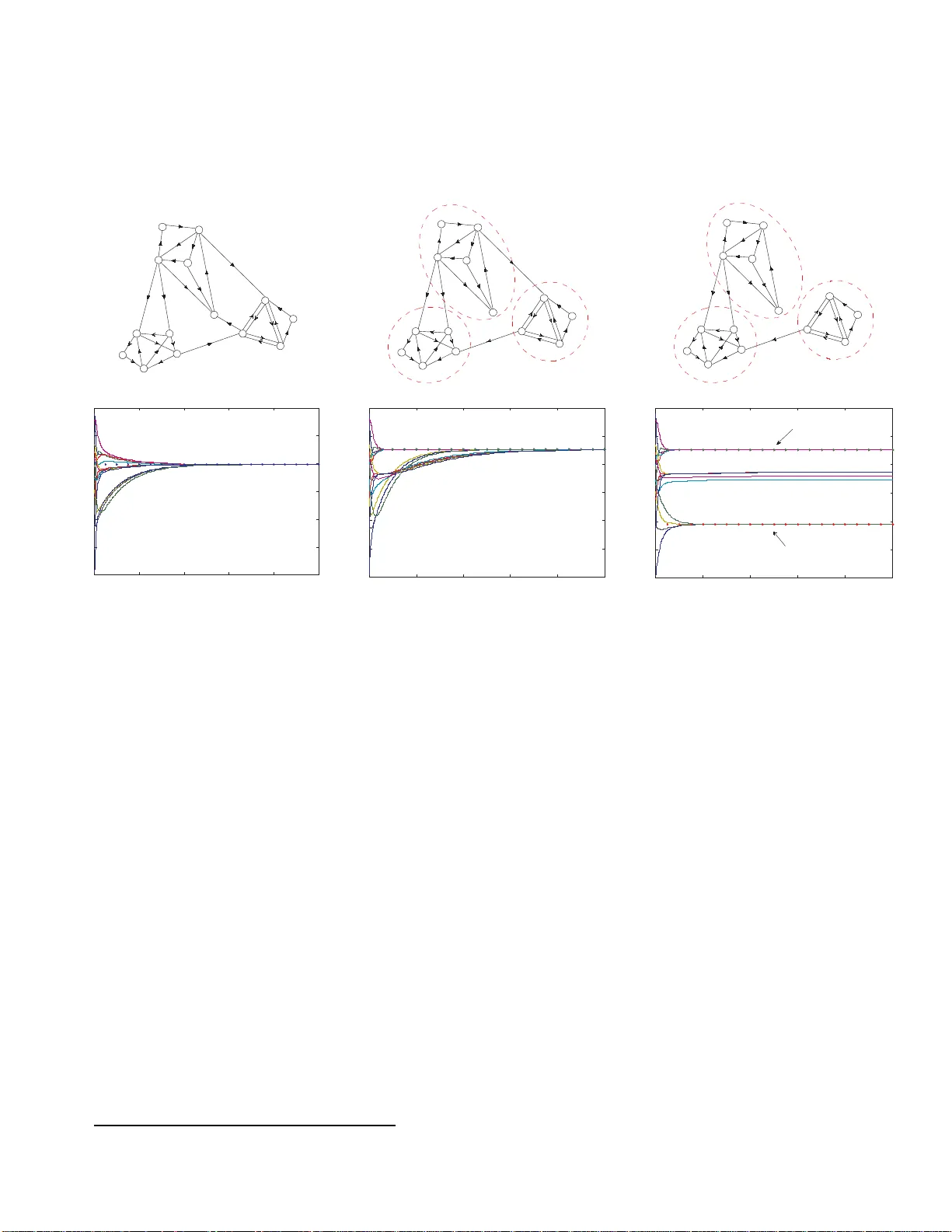
Distribu ted Decision Throug h Sel f-Sync hroni zing Sensor Net w orks in the Presence of Propaga tion Dela ys and Asymm etric Chann els Gesualdo Scutari, Sergio Barbarossa and Loreto P escos olido Dpt. INF OCOM, Univ. of Rome “ L a Sapienza ”, Via Eudos siana 18, 0 0184 Rome, Italy E-mail: { scuta ri, sergio , loreto } @in focom.uniroma1.it . ∗ Manuscript submitted on J anuary 10, 2007 . Fina lly accepted on September 15 , 2007 . Abstract In this paper we pr op ose and analyze a distributed alg orithm for ac hieving globally optimal decisions, either estimatio n or detection, through a self-synchronization mec hanism among linea r ly coupled int egr ators initialized with lo cal measurements. W e mode l the in teractio n among the nodes as a directed g raph with weights (po ssibly) dependent on the r a dio c hannels and w e pose specia l attent ion to the effect of the propa gation delay occur ring in the exchange of data among sens ors, a s a function of the net work ge ometry . W e de r ive necessar y and sufficient co nditions for the prop osed system to reach a consensus on globally optimal decision statis tics . O ne of the ma jor results proved in this w ork is that a consensus is reached with exp o nential conv erge nc e speed for any b ounded delay condition if and only if the directed gr aph is quasi-strong ly connected. W e pro vide a closed form expression for the globa l co ns ensus, sho wing that the effect o f delays is, in general, the int ro ductio n of a bias in the final decision. Finally , w e exploit our closed form expressio n t o devis e a double- step consensus mechanism a ble to provide a n un biased estimate with minim um extra complexit y , without the need to k now o r estimate the channel parameters. 1 In tro duction and Motiv a tions Endo wing a sensor net work w ith self-organizing capabilities is undoub tedly a usefu l goal to increase the resilience of the n et w ork against no de failures (or simply switc hes to sleep m o de) and a v oid p oten tially dangerous congestion conditions a round t he s ink no des. Decen tralizing decisions decreases also th e vulnerabilit y of the netw ork against damages to the sink or con trol nod es. Distributed computation o v er a n et w ork and its application to sta tistical consensus theory has a long history (see, e.g ., [1, 2]), including the pioneering wo rk of Tsitsiklis, Bertsek as and A thans on async hronou s agreemen t problem for discrete-time d istr ibuted decision-making systems [3] and parallel computing [4, 5]. A sensor net w ork m a y b e seen indeed as a sort o f distrib uted computer that has to ev aluate a function of the ∗ This work has b een partially funded by the WINSOC pro ject, a Sp ecific T argeted Research Pro ject (Con tract Number 0033914 ) co-funded by the INFSO DG of the European Commissio n within the R TD activities of the Thematic Priorit y Information S ociety T ec hnologies, and b y A RL/ERO Contrac t N62558-05-P-0458. P art of this w ork was presen ted in the IEEE W orkshop on Signal Pr o c essing A dvanc es in Wir eless Communic ations, (SP A WC-2006) , July 2006, for u ndirected graphs. 1 measuremen ts gathered by eac h sensor, p ossibly without the need of a fus ion cente r. This p roblem ma y b e ad d ressed by taking into accoun t the v ast literature on distribu ted consensus/agreemen t algorithms. These tec hniques ha ve r eceiv ed great atten tion in the r ecen t ye ars within the literature on co op erativ e con trol and multia gent systems [6] − [22]. In particular, the conditions for ac hieving a consensu s o v er a common sp ecified v alue, like a linear com bination of the observ ations, w as solv ed for netw orked c ontinuous-time dyn amic systems by Olfati-Sab er and Mur ra y , un d er a v ariet y of net work top ologies, also allo wing for top ology v ariations d uring th e time necessary to ac hiev e consensu s [7, 8]. The discr ete- time case w as addressed by Tsitsiklis in [4] (see also [5]). Man y recen t works fo cused on the distribu ted computation of more general fu nctions than the av erage of the initial measurements. Th ese includ e a v erage-max-min consen s us [12], geometric mean consensu s [13], and p o w er mean consensus [14]. A study on the class of smo oth functions th at can b e computed by distributed consensu s algorithms w as recen tly addressed in [15]. Applicati on of consensu s algorithms to data fusion p roblem and distributed filtering was prop osed in [16, 17]. The study of the so called alignment problem, w h ere all the agen ts ev en tually r eac h an agreemen t, but without sp ecifying ho w the final v alue is related to the initial measuremen ts, w as carried out in [18]-[22]. Tw o recen t excellen t tutorials on distributed consensu s and agreemen t tec hn iques are [23] and [24]. Consensus ma y b e also seen as a form of self-syn c hronization among coupled dynamical systems. In [25, 26], it w as shown ho w to use the self-synchronizat ion capabilities of a set of nonlinearly coupled dynamical systems to reac h the glob al ly optimal Best Linear Unbiased Estimator (BLUE), assuming symmetric comm un ication links. As we ll kno wn, the BLUE estimator coincides with the Maxim um Lik eliho o d (ML) estimate for th e linear observ ation mo del with additive Gaussian noise. In particular, it was shown in [26] that reac hing a consensus on the state d er iv ativ e, rather than on the state itself (as in [7 ] − [24]), allo ws for b etter resilience against coup lin g noise. In [27], the authors pro vided a discrete- time decen tralized consensu s algorithm to compu te the BLUE, b ased on linear coupling among the no des, as a result of a distributed o ptimization incorp orating the co up ling n oise. The consensus proto cols prop osed in [7], [9] − [21] and [24] − [27] assume that the in teractions among the no des o ccur ins tan taneously , i.e., without any p ropagation dela y . Ho wev er, t his assu mption is not v alid for large scale net works, wh ere the distances among the no des are large enough to introdu ce a nonnegligible communicat ion dela y . Th ere are only a few recen t wo rks that study the consens u s or the agree ment problem, in the p resence of propagatio n dela ys, namely [8], [28] − [32], [47] focu sing on c ontinuous-time s ystems, and [3, 4 ], [5, Ch. 7.3], [22], dealing with discr ete- time proto cols. More sp ecifically , in [8, 28] the authors p ro vide sufficient conditions for the con v ergence of a lin ear a v erage consensus proto col, in the case of time-in v arian t homo ge ne ous dela ys (i.e., equal dela y for all the links) and assuming symmetric comm un ication links. The most app ealing feature of the dynamical system in [8] is the con v ergence of all the state v ariables to a known , d elay-indep endent , function (equal to the a v erage) of the obser v ations. Ho w ev er, th is desired prop ert y is paid in terms of con ve rgence, sin ce, in the presence of homogeneous delays, the system of [8] is able to reac h a consensus if and only if the (common) dela y i s s maller than a giv en, top ology-dep endent, v alue. Moreo v er, the assump tion of h omogeneous dela ys a nd symmetric links is not appropriate for m o deling th e propagati on dela y in a t ypical wireless net work, where the dela ys are pr op ortional to the distance among the nodes and comm unication channels are t y p ically a symmetric . 2 The p roto col of [8] w as generalized in [29] to time-in v arian t inhomo gene ous delays (but symmetric c hannels) and in [30] to asymmetric channels. T he dyn amical systems studied in [29, 30] are guarantee d to reac h an agreement , f or an y given set of finite pr opagatio n dela ys, pr o vided that the netw ork is str ongly c onne cte d . S imilar results, und er weak er (su fficien t) conditions on the (p ossibly time- v arying) netw ork top ology , we re obtained in [3, 4], [5, Ch.7.3] and [22 ] for the con v ergence of d iscrete- time async hronous agreemen t algo rithms . Ho w ev er, since th e final agreemen t v alue is not a kn own function o f the lo cal measuremen ts, agreemen t algorithms prop osed in the ci ted pap ers are mostly appropriate for the alignmen t of mobile agent s, b ut th ey cannot b e imm ediately used to d istr ibutiv ely compute prescrib ed fu n ctions of the sensors’ mea sur emen ts, like decision tests or glo bal parameter estimates. In [47], the authors studied the con ve rgence pr op erties of the agreemen t algorithms p rop osed in [29] − [31] and provided a cl osed form expr ession of the ac hiev able c onsensu s in the case of strongly connected balanced digraphs, under the assumption that the initial conditions are nonnegativ e and the state tra j ectories remain in the nonnegativ e orthan t of the state space. Ho w ev er, the final agree ment v alue dep ends on dela ys, netw ork top ology a nd initial conditions of eac h no de, so that th e bias is practically un a v oidable. In su m mary , in the presence of prop agation d ela ys, classical distribu ted proto cols reac h ing consensus/agreemen t on the state [6] − [24], [27 ] − [31], [47] cann ot b e u sed to ac hiev e prescrib ed fun ctions of the sen s ors’ m easuremen ts that are not biased b y th e channel parameters. Ideally , we would like to hav e a totally decen tralized sy s tem able to r eac h a global consensus on a final v alue whic h is a known , delay-indep endent , function of th e lo cal measur emen ts (as in [8]), for any giv en set of inhomo gene ous propagation d ela ys (a s in [29]) and asym metric channels (as in [30]). In th is pap er, w e pr op ose a distrib u ted d y n amical system having all the ab o v e desired features. More sp ecifically , w e consider a set of linearly coupled first-order dynamical systems and we f ully charac terize its con ve rgence prop erties, for a net w ork with arbitrary topology (not necessarily strongly connected, as opp osed to [29] − [31]) and (p ossibly) asymmetric comm unication channels. In particular, w e consid er an inte raction mo d el among the sensors that is dir ectly related to the physica l channel parameters. The netw ork is mo deled as a w eighte d directed graph, whose w eigh ts are directly related to the (flat- fading) c hannel co efficien ts b et w een the no des and to the transm it p o w er. F urthermore, the geometry- dep end en t propagat ion d ela ys b et w een eac h pair of no d es, as w ell as p ossible time offsets among the no des, are p r op erly tak en in to acc ount. The most a pp ealing feat ur e of the prop osed system is that a consensus on a globally optimal decision statistic is ac hiev ed, for any (b ound ed) set of inhomogeneous dela ys and for any set of (asymmetric) comm un ication c hannels, with the only requirement that the net w ork b e quasi-strongly connecte d and the channel co efficien ts b e n onnegativ e. 1 In p articular, our main con tribu tions are the follo wing: i) W e pro vide the necessary and sufficien t conditions ensur ing local or global con ve rgence, f or any set of finite propagation d elays and net w ork top ology; ii) W e p ro v e that the con v ergence is exp onent ial, with conv ergence rate d ep endin g, in general, on the c hannel parameters and propagation dela ys; iii) W e derive a closed form expression for the final consensus, as a fun ction of the atten uation coefficien ts and pr op agation dela ys of e ac h lin k ; iv) W e sho w ho w to get a final, unbiase d f unction o f the sensor’s measurement s, whic h coi ncides with the globally op timal decision statistics that it would h av e b een compu ted b y a fu sion cen ter having err or- 1 This last requ iremen t, if not immediately satisfied, requires some form of ph ase comp ensation at the receiv er. 3 free access to all the no des. The pap er is organized as follo ws. S ection 2 d escrib es the prop osed first-order linearly coupled d ynamical system and shows ho w to design the system’s parameters and the lo cal pro cessing so th at the state d er iv ativ e of eac h no d e conv erges, asymp toticall y , to the globally optimal decision statistics. Section 3 con tains the main r esu lts of the pap er, namely th e necessary and sufficien t conditions ensuring the global or lo cal conv ergence of the prop osed dynamical system, in the presence of inhomogeneous p ropagation dela ys an d asymmetric c hann els. Finally , S ection 4 con tains n umerical r esu lts v alidating our theoreti cal findin gs and dra ws some co nclusions. 2 Reac h ing Globally Optimal De cisions Through Self-Sync hronization It was recent ly sho wn in [33] that, in many applications, an efficien t sensor net work design should incorp orate some sort of in-net w ork pro cessing. In this pap er, w e show first a class of functions that can b e co mpu ted with a totally distributed app roac h. Then, w e illustrate th e distributed mec hanism able to ac hieve the glo bally optimal decision tests. 2.1 F orms of Consensus A c hiev able With a Decen tralized Approach If w e denote by y i , i = 1 , . . . , N , the (sca lar) measuremen t ta ke n from node i , in a n et w ork co mp osed of N n o des, we ha v e shown in [25, 26] that it is p ossible to compute any fun ction of th e collected data expressible in the f orm f ( y 1 , y 2 , . . . , y N ) = h X N i =1 c i g i ( y i ) X N i =1 c i , (1) where { c i } are p ositiv e coefficient s and g i ( · ), i = 1 , . . . , N , and h ( · ) are arbitrary (p ossibly nonlinear) real functions o n R , i.e. , g i , h : R 7→ R , in a totally decen tralized wa y , i.e., without the need of a sink no de. In the vecto r observ ation case, the fu nction ma y b e generalized to the ve ctor form f ( y 1 , y 2 , . . . , y N ) = h N X i =1 C i ! − 1 N X i =1 C i g i ( y i ) ! , (2) where y i = { y i,k } L k =1 is the v ector con taining the observ ations { y i,k } L k =1 tak en b e sensor i, and g i ( · ) and h ( · ) are arbitrary (p ossibly non lin ear) real functions on R L , i.e., g i , h : R L 7→ R , and { C i } are arbitrary squ are p ositiv e defin ite matrices. Ev en though the class of functions expressible in the form (1) or (2) is not the most general one, nev ertheless it includes many cases of practical int erest, as sho wn in the f ollo wing exa mples. Example 1: ML or BLUE estimate . Let us consider the case where eac h sensor observe s a v ector in the form y i = A i ξ + w i , i = 1 , . . . , N , (3) where y i is th e M × 1 observ ation v ector, ξ is th e L × 1 unkn own common parameter v ector, A i is the M × L mixing mat rix of sensor i , a nd w i is th e observ ation noise v ector, mo deled as a circularly symmetric Gaussian v ector with zero mean and co v ariance matrix R i . W e assume that the n oise v ectors a ffecting different sensors are statistically indep endent of eac h other, and th at eac h matrix 4 A i is f ull column rank, whic h implies M ≥ L . As w ell known, in this case the globally optimal ML estimate of ξ i s [34]: ˆ ξ M L = f ( y 1 , y 2 , . . . , y N ) = N X i =1 A T i R − 1 i A i ! − 1 N X i =1 A T i R − 1 i y i ! . (4) This expression is a sp ecial case of (2), w ith C i = A T i R − 1 i A i and g i ( y i ) = ( A T i R − 1 i A i ) − 1 A T i R − 1 i y i . If the noise p df is unkno wn, (4) still represents a meaningful estimator, as it is the BLUE [34]. Example 2: Detection of a Gaussian pro cess with unkno wn v ariance embedded in Gaus- sian noise with kno wn v ariance. Let us consider no w a detect ion problem. Let y i [ k ] denote the signal obser ved by sensor i , at time k . The detection p roblem can b e cast as a b inary hyp othesis test, where the t wo hyp otheses are H 0 : y i [ k ] = w i [ k ] , H 1 : y i [ k ] = s i [ k ] + w i [ k ] , i = 1 , . . . , N , k = 1 , . . . , K , (5) where s i [ k ] is the useful signal and w i [ k ] is the additive noise. Let us consider the case where the random sequences s i [ k ] and w i [ k ] are spatially un correlated and mo d eled as zero mean in dep end en t Gaussian rand om pro cesses. A meanin gfu l mo del consists in assuming th at the n oise v ariance is kno wn, let us sa y equal to σ 2 w , whereas the useful signal v ariance is not. Under th ese assumptions, the optimal detector consists in computing t he g eneralized lik elihoo d ratio test (GLR T) [3 4, 35] T ( y ) = f ( y 1 , y 2 , . . . , y N ) = 1 K N X i =1 K X k =1 y 2 i [ k ] 1 σ 2 w − 1 b P i + σ 2 w ! − N X i =1 log b P i + σ 2 w σ 2 w ! , (6) and comparing it w ith a thr eshold that dep ends on the d esired false alarm rate. In (6), the term b P i denotes the ML estimate of the signal p ow er at no de i , giv en b y b P i = 1 K K X k =1 y 2 i [ k ] − σ 2 w ! + , where ( x ) + , max ( 0 , x ) . Also in this case, it is easy to c hec k that (6 ) is a s p ecial case of (1), with c i = 1 and g i ( y i ) = 1 K P K k =1 y 2 i [ k ] 1 σ 2 w − 1 b P i + σ 2 w − log b P i + σ 2 w σ 2 w [35]. These are only t w o examples, but the expr essions (1) or (2) can b e used to compute or appro ximate more general fun ctions of the c ollected data, lik e, maximum an d minimum [12], geometric m ean [13], p o wer m ean [14] and so on, through appropr iate choice of the parameters in v olv ed. 2.2 Ho w to Achie ve t he Consensus in a Decen tralized W ay The next question is ho w to ac hiev e the aforementioned optimal decision statistics with a net w ork ha ving no fu sion c ente r. In [25, 2 6] w e prop osed an approac h to solv e this problem usin g a nonlinear in teraction model a mong the n o des, b ased on a n undirected graph a nd with no p ropagation dela ys in the exc hange of informatio n among the sensors. In this paper, we consider a linear interactio n mo del, but we generalize the app roac h to a netw ork where the prop agation dela ys are tak en into accoun t and the net w ork is describ ed by a w eigh ted dir e cte d g raph ( or digr aph, for sh ort), whic h is a fairly general 5 mo del to capture the n on recipro cit y of the co mmunicatio n links go v erning the in teract ion among th e no des. The p rop osed sensor net w ork is comp osed of N no d es, eac h equipp ed with four basic c omp onen ts: i) a tr ansduc er that senses the physical parameter of in terest (e.g., temp erature, concen tration of con taminan ts, radiat ion, etc.); ii ) a lo c al pr o c essing unit that pr o cesses the measurement tak en by the no de; iii) a dynamic al system , whose s tate is initialized with the lo cal measur emen ts and it ev olv es in teractiv ely w ith th e states of nearby sensors; iv) a r adio interfac e that transmits the state of the dynamical system and receiv es th e state trans mitted by the other no des, thus ensuring the interac tion among the nodes 2 . Scalar observ ations . In the scal ar o bserv ation case, the dynamical system present in no de i ev olv es according to the follo wing lin ear fu nctional differential equation ˙ x i ( t ; y ) = g i ( y i ) + K c i X j ∈N i a ij ( x j ( t − τ ij ; y ) − x i ( t ; y )) , t > 0 , x i ( t ; y ) = e φ i ( t ) , t ∈ [ − τ , 0] , i = 1 , . . . , N , (7) where x i ( t ; y ) is th e state fun ction asso ciated to th e i -th sensor that d ep end s on the set of measurement s y = { y i } N i =1 ; g i ( y i ) is a fu nction of the lo cal observ atio n y i , whose form d ep ends on the sp ecific decision test; K is a p ositiv e co efficient measuring the g lobal co up lin g strength; c i is a p ositiv e co efficient that ma y b e adjusted to ac hieve the d esired consens u s; τ ij = T ij + d ij /c is a dela y incorp orating the propagation dela y du e to tra v eling the internod e distance d ij , at the sp eed of ligh t c , p lus a p ossible time o ffset T ij b et wee n no des i and j . The sensors a re assumed t o b e fixed so that all the dela ys are constan t. W e also assum e, realistically , that th e maxim um dela y is b oun ded, with maxim um v alue τ = max ij τ ij . Th e co efficients a ij are assumed to b e nonnegativ e and , in ge neral, dep endent on transmit p ow ers and c h an n el parameters. F or example, a ij ma y represen t the a mplitud e of the signal receiv ed fr om no de i and transmitted fr om no d e j . In suc h a case, w e ha ve a ij = q P j | h ij | 2 /d η ij , where P j is th e p ow er of the signal transm itted from no d e j ; h ij is a fading coefficien t describ ing th e c hannel b et w een n o des j and i ; η is the path loss exp onent . Th e nonnegativit y of a ij requires some form of c hannel comp ensation at the r eceiv er side, lik e in the maximal ratio receiv er, for example, if the c hannel co efficien ts { h ij } ij are complex v ariables. F urthermore, we assu m e, realistically , that no de i “hears” no d e j only if the p o wer receiv ed from i exc eeds a giv en threshold. In suc h a case, a ij 6 = 0, otherwise a ij = 0. The set of no des that sensor i hears is denoted by N i = { j = 1 , . . . , N : a ij 6 = 0 } . Observe that, in general, a ij 6 = a j i , i.e., the c hannels are asymmetric. It is w orth noticing that the state function o f, let us sa y , no d e i dep ends, directly , only on the measuremen t y i tak en by the no de itself a nd only indirectly on the measurements gathered b y the other no d es. In other w ords, ev en though the state x i ( t ; y ) gets to d ep end, ev ent ually , on all the m easur emen ts, through the in teract ion with the o ther no des, eac h no de needs to kno w only its own measuremen t. Because of the dela ys, the state ev olution (7) for, let u s sa y , t > 0, is uniqu ely d efined p ro vided 2 The state v alue is t ran smitted by mo dulating an appropriate carrier. Because of space limitations, it is n ot possible to go in to the details of this asp ect in this pap er. In parallel w orks, w e hav e shown that a p ulse p osition mo dulation of ultraw ideband signals ma y b e a va lid candidate for implementing the interaction mechanism. Some preliminary remarks on th e implementatio n of the proposed proto col can be found in [38]. 6 that the in itial state v ariables x i ( t ; y ) are sp ecified in the in terv al from − τ to 0. The initial conditions of (7) are assu med to b e tak en in the s et of contin uously differenti able and b ound ed functions e φ i ( t ) mapping the in terv al [ − τ , 0] t o R (see App endix B for more details). V ector observ ations . If eac h sens or measures a s et of, let us sa y , L ph ysical parameters , the coupling mec hanism (7 ) generalizes into th e follo wing expression 3 ˙ x i ( t ; y ) = g i ( y i ) + K Q − 1 i X j ∈N i a ij ( x j ( t − τ ij ; y ) − x i ( t ; y )) , t > 0 , x i ( t ; y ) = e φ i ( t ) , t ∈ [ − τ , 0] , i = 1 , . . . , N , (8) where x i ( t ) is the L -size vect or state of th e i -th no d e; g i ( y i ) is a vecto r f u nction of the lo cal observ ation y i = { y i,k } L k =1 , i.e. g i : R L 7→ R L ; and Q i is an L × L n on-singular matrix that is a free parameter to b e c hosen acco rd in g to the sp ecific purp ose of th e sensor net work. As in (7), the initial conditions of (8) are assumed to b e arbitrarily tak en in the set of conti nuously differen tiable a nd b ounded (v ectorial) functions e φ i ( t ) mapp ing the i nterv al [ − τ , 0] to R L , w .l.o.g.. 2.3 Self-Sync hronization Differen tly fr om most pap ers dealing with av erage consensus problems [6] − [24] and [27] − [31], where the global consen s us was intended to b e the situation where all d ynamical systems r eac h the same state v alue, w e adopt here the alternativ e definition already introduced in o ur previous work [26]. W e define the consensus (through netw ork sync hronization) with r esp ect to the s tate d erivative , rather than to the state, as follo ws. Definition 1 Given th e dynam ic al syst em in (7) (o r (8)), a solution { x ⋆ i ( t ; y ) } of (7 ) (or (8)) is said to b e a sync hronized state of the system, if ˙ x ⋆ i ( t ; y ) = ω ⋆ ( y ) , ∀ i = 1 , 2 , . . . , N . (9) The system (7) (or (8)) is said to globally synchr onize if ther e exists a synchr onize d state as in (9), and al l the state derivatives a symptotic al ly c onver ge to this c ommo n value, for an y giv en se t of initial c onditions { e φ i } , i.e., lim t 7→∞ k ˙ x i ( t ; y ) − ω ⋆ ( y ) k = 0 , ∀ e φ i , i = 1 , 2 , . . . , N , (10) wher e k · k denotes some ve ctor norm and { x i ( t ; y ) } is a solution of (7) (or (8)). The synchr onize d state is said to b e globally asymptotically stable if the system glob al ly synchr onizes, i n the sense sp e cifie d in (10). The system (7) (or (8)) is said to lo cally synchr onize if ther e exist disjoint subsets o f the no des, c al le d clusters, wher e th e no des i n e ach cluster have sta te derivatives c onver ging, asymp totic al ly, to the same value, for any given set of initial c onditions { e φ i } . Observe that, according to Definition 1, if there exists a globally asymptotically stable sync hronized state, then it m ust necessarily b e unique (in th e deriv ative ). In th e case of lo cal sync hr on ization in s tead, the system may hav e multiple syn c hronized clusters, eac h of them with a different sync hronized state. 3 W e assume th at the coupling coefficients a ij are t h e same for all estimated parameters. This assumption is justified by t he fact that all the parameters are sen t through the same physical channel. 7 As it will b e sho wn in the next section, one of the reasons to introd uce a no v el definition of consensus , differen t f r om the classical one [6] − [24], [27] − [31], is that the con v ergence on the s tate deriv ativ e, rather than on the state, is not affected b y the presence of propagation delays and there is a w a y to mak e the final co nsensu s v alue to coi ncide with the globally optimal decisio n statistic. In the ensuing sec tions, w e will provide necessary and su fficien t conditions for the system in (7) (o r (8)) to locally/glo bally sync hronize according to Definition 1, along with th e closed form expr ession of the sync hr on ized state. 3 Necessary and Sufficien t Conditions for Self-Sync hronization The pr oblem we addr ess no w i s to chec k if, in the pr esence of propagation delays and asymmetric comm unication links, the systems (7) and (8 ) can still b e used to ac hieve globally o ptimal decisio n statistics in the form (1) and (2), in a totally distributed wa y . T o deriv e our main results, we r ely on some basic notions of digraph theory . T o mak e the pap er self-con tained, in App endix A.1 we recall the basic defi nitions of we ak, qu asi-strong and str on g connectivit y (W C, QSC, and S C, for sh ort) of a digraph. In App endix A.2, w e recall th e algebraic prop erties of the Laplacian m atrix asso ciated to a digraph and we deriv e the prop erties of its left eigen v ectors, as they will p lay a fu ndamenta l r ole in computing the ac hiev able forms of consensus. In App endix B, we pro vide sufficient c onditions for the marginal stabilit y of linear dela y ed d ifferen tial equations, as they will b e in strumenta l to prov e the main results of this pap er. The next theorem pr ovides necessary and sufficien t conditions for th e prop osed decen tralized ap- proac h to ac hiev e the d esired consensus in the p resence of p ropagation d ela ys and asymmetric com- m unication links. Theorem 1 L et G = { V , E } b e the digr aph asso ci ate d to the network in (7), with L apla cian matrix L . L et γ = [ γ 1 , . . . , γ N ] T b e a left eigenve ctor of L c orr esp onding to the zer o eigenvalue , i.e., γ T L = 0 T N . Given the system i n (7), assume tha t the fol lowing c onditions ar e satisfie d: a1 The c oupling gain K and th e c o efficients { c i } ar e p ositive; the c o effici e nts { a ij } ar e non-ne g ative; a2 The pr op agation delays { τ ij } ar e time-invariant and finite, i.e. , τ ij ≤ τ = max i 6 = j τ ij < + ∞ , ∀ i 6 = j ; a3 The i ni tial c onditions ar e taken in the set of c ontinuously differ entiable and b ounde d functions mapping the interval [ − τ , 0] to R N . Then, system (7 ) g lob al ly synchr onizes for an y giv e n set of pr op agation delays, if and only if the digr aph G is Quasi-Str ongly Co nne cte d (QSC). The synchr onize d state is given by ω ⋆ ( y ) = X N i =1 γ i c i g i ( y i ) X N i =1 γ i c i + K X N i =1 X j ∈N i γ i a ij τ ij , (11) wher e γ i > 0 if and only i f no de i c an r e ach al l the other no des of the digr aph thr ough a str ong p ath, or γ i = 0 , otherwise. The c onver genc e is exp onential, with r ate arbitr arily close to r , − min i {| Re { s i }| : p ( s i ) = 0 and s i 6 = 0 } , wher e p ( s ) is the char acteristic function asso ciate d to system (7) (cf. App endix B). 8 Pro of. See App en d ix C. Theorem 1 has a v ery br oad applicabilit y , as it do es not mak e an y particular r eference to the net w ork top ology . If, con ve rsely , the top ology has a sp ecific structure, th en we m a y hav e the follo wing forms of co nsens u s. 4 Corollary 1 Given system (7), assume that c onditions a1)-a3) of The or em 1 ar e satisfie d. Then, 1. The system glob al ly synchr onizes and the synchr onize d state is given by ω ⋆ ( y ) = g r ( y r ) , r ∈ { 1 , 2 , . . . , N } , (12) if and only if the digr aph G c ontains only one sp anning dir e cte d tr e e, with r o ot no de given by no de r . 2. The system glob al ly synch r onizes and the synchr onize d st ate is given by (11) with al l γ i ’s p ositive if and only if the digr aph G is Str ongly Conne c te d (SC). The synchr onize d state b e c omes ω ⋆ ( y ) = X N i =1 c i g i ( y i ) X N i =1 c i + K X N i =1 X j ∈N i a ij τ ij , (13) if and only if, in addition, the digr aph G is b alanc e d. 3. The system lo cally synchr onizes in K disjoint clusters C 1 , . . . , C K ⊆ { 1 , . . . , N } , 5 with synchr o- nize d state derivatives for e ach cluster ˙ x ⋆ q ( t ; y k ) = X i ∈ C k γ i c i g i ( y i ) X i ∈ C k γ i c i + K X i ∈ C k X j ∈N i γ i a ij τ ij , ∀ q ∈ C k , k = 1 , . . . , K, (14) with y k = { y i } i ∈ C k , if and only if the digr aph G is we akly c onne cte d (WC) and c ontains a sp anning dir e cte d for est with K R o ot Str ongly Conne cte d Comp onents (RSCC). 6 The pr o of of this corollary is a p articular case of Theorem 1, exc ept that w e exploit the str ucture of the left eigen v ector corresp ond ing to the zero eigen v alue of the L aplacian matrix L , as d eriv ed in App end ix A.2. Th e p revious r esults can b e extended to the v ector case in (8), according to the follo wing. 7 Theorem 2 Given the system (8 ), assume that c onditions a 2)-a3) of The or em 1 ar e satisfie d and that the matric es { Q i } ar e p ositive definite. Then, the system synchr onizes for any given set of pr op agation delays, if a nd only if the digr aph G is QSC. The synchr onize d state is given by ω ⋆ ( y ) , N X i =1 γ i Q i + I L ⊗ K N X i =1 N X j ∈N i γ i a ij τ ij − 1 N X i =1 γ i Q i g i ( y i ) ! , (15) 4 W e fo cus, w.l.o.g., only on WC digraphs. In the case of non WC digraphs, Corollary 1 applies t o each disjoin t compon ent of the digraph. 5 In general, the clusters C 1 , . . . , C K are n ot a partition of the set of nod es { 1 , · · · , N } . 6 Please, see App end ix A.1 for the formal definition of (ro ot) strongly connected component. 7 The pro of is omitted b ecause of space limitations, but it follo ws the same guidelines as the proof for the scalar case, since the interaction among the nodes is the same. 9 wher e ⊗ denotes the Kr one cker pr o duct and γ i > 0 if and only if no de i c an r e ach al l the other no des of the digr aph b y a str ong p ath, or γ i = 0 , otherwise. The c onver genc e is exp onential, with r ate arbitr arily close to r , − min i {| Re { s i }| : p ( s i ) = 0 and s i 6 = 0 } , wher e p ( s ) is the char acteristic function asso ciate d to system (8). 3.1 Impact of propa gation de la ys on c onv ergence The impact of dela ys in consensus-ac hieving algorithms has b een analyzed in a series of w orks [5, Ch.7.3], [8], [22], [28] − [31]. Among these works, it is u seful to distinguish b et we en consensus al- gorithms, [8, 23], wh er e the states of all the sensors con verge to a prescrib ed function (t ypically the a v erage) of the s en sors’ initial v alues, and agreemen t algorithms, [5, Ch.7.3], [22], [28 ] − [31], [47], where the goal is to mak e all the states to conv erge to a common v alue, b ut w ithout sp ecifying h ow this v alue has to b e related to the initial v alues. In our application, w e can only rely on consensus algorithms, where the final consensus h as to c oincide with the globally optimal decision stat istic. The consensu s algorithms an alyzed in [8 , 23] assume the same dela y v alue for all the lin k s , i.e., τ ij = τ , and sym metric c hannels, i.e., a ij = a j i , for all i 6 = j . Und er these assumptions, the a verag e consensus in [8, 23] is reac hed if and only if the common dela y τ is upp er b ound ed by [8] τ < π 2 1 λ N , (16) where λ N denotes the maximum eigen v alue of the Lap lacian asso ciated to the und ir ected graph of the net w ork (cf. A pp endix A). Since, for an y graph with N nod es, we h a v e [39] N N − 1 d max ≤ λ N ≤ 2 d max , (17) with d max denoting the maximum graph degree, increasing d max imp oses a strong constrain t on the maxim um (common) tolerable dela y . This implies, for example, that net w orks w ith h ub s (i.e. , no d es with v ery large degrees) th at are commonly encoun tered in scale-free n et w orks [36], are fragile against propagation dela ys, when us in g the consensu s algorithms of [8, 23]. In o ur application, w e w ere motiv ated to extend the a pp roac h of [8, 23] to the general ca se of inhomogeneous dela ys and asymm etric c hann el lin ks. Nev ertheless, in spite of the less restrictiv e assumptions, Theorem 1 sho ws that our prop osed algorithm is more robust against propagation d ela ys, since its conv ergence capabilit y is not affe cte d by the delays . Moreo v er, our approac h is v alid in the more general case of asymmetric communicatio ns links an d the final v alue is not simply the av erage of the measur emen ts, but a weig hted a v erage of functions of the measurement s that can b e made to coincide with the desired globally optimal d ecision statistic in the form (1) or (2), through a prop er c hoice o f the co efficien ts c i . An in tuitiv e reason for explaining the main adv an tage of our approac h is relate d to the use of an alternativ e defin ition of global consensus: As opp osed to con v ent ional metho d s requirin g consensus on the state v alue, i.e. [6] − [24], [28] − [31], we require the con v ergence ov er the state deriv ativ e, i.e., w e only requir e that th e state tra jectories con v erge to wards p arallel straigh t lines. The slop e m ust b e the same for all the tra jectories and it h as to coincide with the desired decision statistic. But the constant terms of eac h line may differ from sensor to sensor. This provides additional deg rees of freedom that , ev en tually , mak e our approac h m ore r ob u st against propaga tion dela ys or lin k co efficien ts. 10 3.2 Effect of netw ork top ology on final consensus v alue Theorem 1 generalizes all th e previous (only su fficien t) conditions kn own in the literature [8], [28] − [31] for the con ve rgence of lin ear agree ment/ consensus pr otocols in the presence of p ropagation dela ys, since it pr ovides a complete c haracterization of the synchronizatio n capabilit y of the system for any p ossible degree of connectivit y in the n etw ork (not only for SC digraphs), as detailed next. In general, the digraph mo deling the in teraction among the no d es may ha v e one of the follo wing structures: i) the digraph con tains o nly one spanning directed tree, with a single ro ot no de, i.e., there exists only one no d e that can reac h all the other no des in the net w ork through a strong d irected path; ii) the d igraph con tains more than one spanning d irected tree, i.e., there exist m ultiple no d es (p ossibly all the n o des), strongly connected to eac h other, that can r eac h all the other no des b y a strong directed path; iii) th e digraph is we akly connected and con tains a spanning forest, i.e., there exists no n o de that can r eac h every other no de through a strong d irected path; iv) th e digraph is not even weakly connected. T h e last case is the least in teresting, as it corresp onds to a set of isolated sub net w orks, that can be analyzed indep endently of eac h other, as o ne o f the p r evious cases. In the first t w o ca ses, according to Theorem 1, system (7) ac hiev es a glob al consensu s, wh ereas in th e third case the system forms clus ters of consensus with, in g eneral, differen t consensu s v alues in e ac h cluster, i.e., the system sync hronizes o nly lo c al ly . In other words, a global consensus is p ossible if and only if there exists at least one n o de (the r o ot no de of the spannin g d irected tree of the d igraph) that can send its information, directly or indirectly , to all the other n o des. I f n o such a no d e exists, a global consensus cannot b e reac hed. H o wev er, a lo c al consensus is still ac hiev able among all the no des that are able to in fl uence eac h other. In terestingly , the closed form expr essions of the syn c hronized state giv en b y (11) confirms the ab ov e statemen ts: The obs er v ation y i of, let u s sa y , sensor i affects the final consensus v alue if and only if suc h an inform ation c an reac h all the other no des b y a strong directed p ath. As a b y-pro d uct o f this result, w e ha v e the follo wing sp ecial cases (Corollary 1): If there is only one n o de that can r eac h all the others, then the final consensus dep en d s only on the o bserv ation tak en fr om that no de; on the other extreme, the final consensu s con tains con tributions from al l the no des if and only if th e digraph is SC. Moreo v er, if a no d e con tributes to the final v alue, it do es that through a w eigh t that dep en d s on its in/out-degree. The set of weig hts { γ i } in (11) can b e in terpreted as a measure of th e “ symme- try/asymmetry” of the comm unication links in the net wo rk: Some of these weigh ts are equal to eac h other if and only if the su b d igraph asso ciated to t he co rresp onding no des is balanced ( or undirected). The sync hronized state, as giv en in (11), suggests also an interesti ng in terpretation of the consens u s formation mec hanism of system (7 ), based on the so called c ondensation digraph . 8 F rom (11) in fact, one infer s that all the no des th at are SC to eac h other (usually referred to as no des of a strongly connected comp onent (SCC)) pro du ce the same effect on the fi nal consensus as an e quivalent single no de th at r epresen ts the consensus within that SCC. In f act, one ma y easily chec k if system in (7) lo cally or globally synchronizes and whic h no d es co ntribute on the consensus, simp ly reducing the original digraph to its equiv alen t c ondensation digraph and looking for th e e xistence of a s p anning 8 Please, refer to Append ix A.1 for the d efinition of condensation digraph and th e pro cedure f or redu cing a digraph into its condensation digraph. 11 directed tree in the conden s ation d igraph. The only SCC s of the original digraph that w ill pr o vide a con tribution on the fi nal consensus are the SCCs asso ciated to th e ro ot no des of the condensation digraph. As an additional remark, th e p ossibilit y to form clusters of consensus, r ather than a global con- sensus, d ep ends on t he (c hannel) co efficient s a ij . If , e.g., these co efficients ha v e the expression as giv en in Section 2.2, they ma y b e altered by changing the t ransm it p o w ers P j . As a consequen ce, t he no des with the highest transmit p o w er will b e the most influential ones. If, for example, w e w ant to set a certai n parameter on eac h n o de, lik e, e.g., a decision threshold, w e can use the same consensus mec hanism used in this pap er b y assigning, for example, the desired v alue to, let us sa y , no de i , and select the transmit p ow ers so that nod e i is the only no de that can reac h ev ery o ther nod e. 3.3 Ho w to get un biased estimates The closed form exp r ession of th e sync hronized state, as giv en in (11) (or in (15)), is v alid for any giv en digraph (not only f or und irected graph s as in [8 ]). Expr ession (11) sho ws a dep end ence of the final consensus on the n et w ork top ology and p ropagation parameters, through the co efficien ts { a ij } , { γ i } and the delays { τ ij } . This means that, ev en if the propagation dela ys do not affect the con v ergence of the p rop osed system, th ey in tro duce a b ias on the final v alue, whose amoun t dep ends on b oth th e dela ys a nd coefficien ts { a ij } . The effect of propagation paramet ers and net w ork top ology on the final sync hronized state is also cont ained in the eigen ve ctor γ of the Laplacian L . Th is implies that the final consensus resulting from (11) ca nn ot b e made to c oincide with the desired decision statistics as giv en b y (1), except th at in the trivial case where all the dela ys are equal to zero and the digraph is balanced (and thus strongly connected). Ho wev er, expression (11) suggests a metho d to get rid of an y bias, as detai led next. The bias due to the propagation dela ys can b e remo v ed usin g the follo wing t wo -step algorithm. 9 W e let the s ystem in (7) to evo lv e twice : The first time, the system evo lve s according to (7) and we denote by ω ⋆ ( y ) the synchronized state; the second time, we set g i ( y i ) = 1 in (7), for all i , and th e system is let to evo lve again, d enoting the fin al synchronized state b y ω ⋆ ( 1 ). F rom (11 ), if w e take the ratio ω ⋆ ( y ) /ω ⋆ ( 1 ), we get ω ⋆ ( y ) ω ⋆ ( 1 ) = X N i =1 γ i c i g i ( y i ) X N i =1 γ i c i , (18) whic h coincides with the id eal v alue ac hiev able in the absence of dela ys. Thus, this simple doub le-step algorithm a llo ws us to remo v e the bias term dep en ding on the dela ys and o n the c han n el co efficients, without requir ing the kn o wledge or estimate of neither set of p arameters. If the netw ork is strongly connected and b alanced, γ i = 1 , ∀ i and then the comp ensated consen- sus coincides with the desired v alue (1). If the n et w ork is unbala nced, the c omp ensated consensu s ω ⋆ ( y ) /ω ⋆ ( 1 ) does not dep end on the (c hann el) coefficien ts { a ij } , but it is still biased, with a b ias dep end en t on γ , i.e., on the netw ork top ology . Nev ertheless, this residu al b ias can b e eliminated in a decen tralized wa y according to the follo wing iterativ e algorithm. Let u s denote by N r the num b er of no des in the RSCC of the digraph . A t the b eginning, ev ery no de sets g i ( y i ) = 1 and c i = 1 , 9 W e fo cus only on the scalar system in ( 7), b ecause of space limitation. 12 i = 1 , . . . , N and the netw ork is let to ev olv e. The fi nal consensu s v alue is denoted b y ω ⋆ ( 1 ). Th en, the net w ork is let to evo lv e N r times, according to the follo wing proto col. A t step i , w ith i = 1 , . . . , N r , the no des w ithin the i -th SC C , set g i ( y i ) = 1, while all the other no d es set g k ( y k ) = 0 for all k 6 = i . Let us denote by ω ⋆ ( e i ) th e fi nal consensu s v alue, w h ere e i is the canonical v ector having all zeros, except the i -th comp onen t, equ al to one. Rep eating this pr o cedure f or all the S CC’s, at the end of the N r steps, eac h no d e is n ow able to compute the ratio ω ⋆ ( e i ) /ω ⋆ ( 1 ), whic h coincides with ˜ γ i := γ i / P k γ k . Th us, after N r + 1 steps, ev ery no de kn o ws its o wn (normalized) ˜ γ i . Th is v alue is subsequent ly used to comp ensate for the netw ork unbala nce as follo ws. T h e comp ensation is ac hieve d b y simply setting, a t eac h n o de c i = c i / ˜ γ i . In f act, w ith th is setting, the fi nal ratio ω ⋆ ( y ) /ω ⋆ ( 1 ) coincides with th e d esir ed unbiase d expr ession given by (1), for all i such that γ i 6 = 0. If the digraph G is S C, this pr o cedure corresp onds ind eed to mak e the Laplaci an matrix L ( G ) balanced, so that the left ei gen vec tor of L asso ciated to the zero eigen v alue b e prop ortional to the vecto r 1 N . T his pro cedu r e only needs some kind of co ordination among the n o des to mak e them w orking according to a describ ed sc heduling. It is imp ortan t to r emark that, s in ce the eigenv ector γ do es not dep end on the obser v ations { y i } , the prop osed algorithm is r equired to be p erformed at the start-up phase o f t he net w ork and rep eated only if the net work top ology or the c h annels c hange through time. In summary , w e can eli minate the effect of b oth delays and c h annel paramete rs on the final consensus v alue, thus achieving the optimal decision statistics as giv en in (1), w ith a totally decentral ized algorithm, at th e price of a sligh t increase of complexit y and the need for some coordination among the no des. 10 3.4 Asymptotic con v ergence rate Theorem 1 generalize s previous results on the con v ergence s p eed of classica l linear consensus proto cols (see, e.g. [8, 23]) to the case in which there are pr opagation dela ys. In spite of the pr esence of dela ys, the pr op osed system still con ve rges to the consensus w ith exp onential con v ergence rate, i.e., k ˙ x ( t ; y ) − ω ⋆ ( y ) k ≤ O e r t , wh ere the con ve rgence factor r < 0 is d efined in Th eorem 1. Thus, the conv ergence sp eed is d ominated b y t he slo west “mod e” of the sy s tem. Moreo ve r, as exp ected, the presence o f dela ys affects the con ve rgence sp eed, as the roots of c haracteristic equation p ( s ) = 0 asso ciated to system (7) dep end, in general, on b oth netw ork top ology and propagation dela ys. Unfortunately , a closed form exp r ession of t his dep endence is n ot easy t o deriv e, and the roots of p ( s ) = 0 n eed to be co mpu ted numerically . In the sp ecial case of n egligible dela ys instead, we can pr o vide a b ound of the conv ergence factor as a function of the c hann el parameters throu gh the eigen v alues of the Laplacian m atrix L . Setting τ ij = 0 in (7), the c h aracteristic equation asso ciated to (7) becomes p ( s ) = | s I + L | = 0, whose solutions are just the eig env alues of − L . Und er the a ssum ptions of Theorem 1 , it foll o ws that r = − min i { Re { λ i } : λ i ∈ σ { L } , and λ i 6 = 0 } , (19) where σ { L } denotes the s p ectrum of Laplacian matrix L . The v alue of r is negativ e if and only if the digraph G is QSC [45, Lemma 2]. Using (19), w e can obtain b ound s on the con v ergence rate as a 10 In [47], the authors provided a closed form expression of the agreement o btainable with an SC b alanced net wo rk ac hieving consensus on the sta te. Ho w ever, t h at expression dep end s on the channel parameters and on the initial conditions in a w ay that the bias cann ot b e eliminated through a distributed procedu re. 13 function of the net wo rk top ology , as s h o wn next. When the d igraph is strongly connected w e ha v e 11 r ≤ κ , − λ 2 1 2 ( D γ L + L T D γ ) < 0 , (2 0) where D γ , d iag( γ 1 , · · · , γ N ), γ is the left eigen ve ctor o f L asso ciated to the zero eigen v alue, normal- ized s o that k γ k ∞ = 1, and λ 2 ( A ) denotes the second smallest eigen v alue of the symmetric matrix A . It f ollo ws from (20) that system ( 7) reac hes a consensus with rate at lea st κ . As sp ecial cases of (20) w e hav e the follo wing: i) In th e case of b alanced digraph s, D γ = I a nd th us κ = − λ 2 1 2 ( L + L T ) ; ii) If the digraph is undirected ( and connected) D γ = I , L = L T and th us κ = − λ 2 ( L ), where λ 2 ( L ) is also kno wn as the algebr aic c onne ctivity of the digraph [39]. F or the case in whic h th e digraph is QSC, some b oun ds of r can b e f ound in [44, 46] using the generalization of the classical defi nition of alge- braic connectivit y . Moreo ve r, interesti ngly , the con v ergence rate of the system, under the assumption of Theorem 1, can b e related to th e con v ergence rate s of the SCC s of cond en sation d igraph asso ciated to the system. B ecause of lac k of space, we su ggest the in terested reader to c hec k [45] for more details. In conclusion, according to the ab ov e r esu lts, we infer that the con v ergence r ate of the pr op osed consensus algorithm, at le ast in the ab s ence of pr opagatio n dela ys, is the same as t hat o f t he cl assical linear proto cols ac hieving consensus o n the state. 4 Numerical Results In this section, w e illustrate fir st s ome examples of consensus, for different netw ork top ologies. Then, we sho w an app lication of th e pr op osed tec hnique to an estimation problem, in the presence of random link co efficien ts. In b oth examples, the analog system (7) is implemen ted in discrete time, with sampling step size T s = 10 − 3 . Example 1: Different forms of consensus for differen t top ologies In Figure 1, w e consid er th ree top ologie s (top row), namely: (a) a SC digraph, (b) a QS C digraph with three SCCs, and (c) a WC (not Q SC) digraph with a spann ing forest comp osed b y t wo trees. F or eac h digraph, we also sk etc h its decomp osition in to SCCs (eac h one enclosed in a circle), corresp onding to the no d es of the asso ciated condensation digraph (whose ro ot S CC is den oted b y RSCC). In the b ottom ro w of Figure 1, w e p lot the dyn amical ev olutions of th e state deriv ativ es of system (7) versus time, for the th r ee net wo rk top ologies, together with the th eoretical asymptotic v alues predicted by (11) (dashed line w ith arro ws). As prov ed by Theorem 1, the dynamical system in Figure 1a) ac hiev es a global consensus, since the u nderlying d igraph is SC. The net wo rk of Figure 1b), instead, is not SC, but the system is still able to globally sync hronize, since there is a set of no des, in the RSC C comp onent , able to reac h all the other no des. The fin al consensus, in suc h a case, con tains only the con tributions of the no des in the RSCC , since no other no d e b elongs to the ro ot of a sp anning directed tree of the co nd ensation digraph . Finally , the system in Fig ure 1c) cannot reac h a global consensus since ther e is no n o de that can reac h all the others, but it do es admit t wo disjoint clusters, corresp ondin g to the t wo RSC Cs, n amely RSCC 1 and RS CC 2 . The middle lines of Figure 1c) refer to the n o des of the SCC component, not belonging to either RSCC 1 or RS CC 2 , that are affected b y the 11 The inequalit y in (20) follo ws from the fact that Re { λ i } ≥ | κ | for all nonzero eigen v alues { λ i } of L [45]. 14 consensus ac hiev ed in the tw o RS CC comp onent s, b ut that cannot affect th em. Observe that, in all the cases, the s tate deriv ativ es of the (global or lo cal) clusters conv erge to the v alues p redicted b y the closed form expression giv en in (11), (12) or (14), dep end ing on the n et w ork top ology . (a) (b) 1 2 4 5 6 8 11 9 10 12 13 ( c ) 3 7 14 1 2 4 5 6 8 11 9 10 12 13 3 7 14 1 2 4 5 6 8 11 9 10 12 13 3 7 14 RSCC 1 RSCC 2 0 200 400 600 800 1000 50 60 70 80 90 100 110 i t e r a ti o n i n d e x _ x i ( t ) 0 200 400 600 800 1000 50 60 70 80 90 100 110 i t e r a t i o n i n d e x _ x i ( t ) 0 200 400 600 800 1000 50 60 70 80 90 100 110 i t e r a t i o n i n d e x _ x i ( t ) RSCC SCC 1 SCC 2 SCC RSCC 1 RSCC 2 . . . Figure 1: Co ns ensus for three differe nt ne tw or k top olo gies: a) SC digraph; b) QSC digr aph with three SCCs; c) WC digraph with a tw o trees for est; T s = 10 − 3 , τ = 50 T s , K = 30, N= 14. Example 2: Distribut ed optimal decisions through self-sync hronization . T he b ehavio rs sho wn in the pr evious example refer to a giv en r ealizat ion o f the top ology , w ith give n link co efficien ts, and of the observ ations. In this example, we rep ort a global p arameter represent ing the v ariance obtained in the estimate of a scalar v ariable. Eac h s ensor observes a v ariable y i = A i ξ + w i , where w i is add itiv e zero mean Gaussian noise, with v ariance σ 2 i . The goal is to estimate ξ . The estimate is p erformed through the in teraction system (7), with functions g i ( y i ) = y i / A i and coefficients c i = A 2 i /σ 2 i , c hosen in ord er to ac hiev e the globally optimal ML estimate. Th e net w ork is comp osed of 40 no des, randomly spaced ov er a square of size D . Th e s ize of the square o ccupied by the net w ork is chosen in order to ha ve a maxim um dela y τ = 100 T s . W e set the thresh old on th e amplitude of the minimum useful signal to zero, so that, at least in p r inciple, eac h no de hears eac h other no de. T he corresp onding digraph is then SC. T o simulat e a practical scenario, the c hann el co efficients a ij are generated as i.i.d. Ra yleigh r andom v ariables, to accommod ate f or channel fading. Eac h v ariable a ij has a v ariance dep end ing on the distance d ij b et wee n no des i and j , equal to 12 σ 2 ij = P j / (1 + d 2 ij ). In Figure 2, we plot the estimated a v erage s tate deriv ativ e (plu s and m in us th e estimation standard deviation), as a function of the iteration index. Figure 2a) refers to the case in whic h there is only 12 W e use the attenuation factor 1 / (1 + d 2 ij ) instead of 1 /d 2 ij to a void th e un d esired even t that, for d ij < 1 the receive d p o wer might b e greater than th e transmitted p o wer. 15 0 50 100 150 200 250 300 350 400 450 500 0 20 40 60 80 100 120 140 160 180 200 ite ration i ndex m ˆ θ ± σ ˆ θ S N R m = 5 dB (a) 0 50 100 150 200 250 300 350 400 450 500 0 20 40 60 80 100 120 140 160 180 200 ite ration i ndex m ˆ θ ± σ ˆ θ S N R m = 5 dB S N R C = 20 dB (b) Figure 2: Estimated par ameter vs. conv ergence time in the a bsence [subplot a )] and in the presence [s ubplo t b)] of receiver noise: a) ML e stimate by a cen traliz e d system (dotted lines ); b) estimate by the prop osed method, with no pro pagation delays, (dashed and dotted lines plus “ × ” for the av erag e v a lue); c) estimate by the prop osed metho d, with pro pagation delays (dashed lines plus “ ⊳ ” for the av erage v a lue); d) estimate by the tw o-step estimation metho d leading to (18 ) (solid lines plus “ ◦ ” for the av erag e v alue). observ ation noise, but there is no noise in the exc hange of inf orm ation a mong the n o des. Con v ersely , Figure 2b) refers to the case wh ere the no de in teraction is n oisy , so that the state ev olution of eac h sensor is describ ed by the state equation ˙ z i ( t ) = ˙ x i ( t ) + v i ( t ), with ˙ x i ( t ) give n b y (7), where v i ( t ) is white Gaussian noise; the SNR is | ξ | 2 /σ 2 w = 20 dB. The av erages are tak en across all the no d es, for 100 indep end en t reali zations of the net w ork, wh ere, in eac h realization we generated a new top ology and a new set of c hannel co efficien ts and noise terms. The results refer to the follo wing cases of in terest: a) ML estimate ac hiev ed with a cen tralized sys tem, w ith no comm unication errors b et wee n nod es and fusion cen ter (dotted lines); b) estimat e ac hiev ed with the prop osed m etho d, with no propagatio n dela ys, as a b enchmark term (dashed and dotted lines plus × marks for the a v erage v alue); c) estimate ac hiev ed with the prop osed metho d, in the presence of p ropagation dela ys (dashed lines p lus triangles for the a ve rage v alue); d) estimate ac hieve d with the t w o-step estimation metho d leading to (18) (solid lines plus circles for the a v erage v alue). F rom Figure 2 w e can see that, in the absence of dela ys, the (decen tralized) iterativ e algorithm based on (7) b eha v es, asymptotically , as the (cen tralize d) globally optimal ML estimator. In the presence of dela ys, we obser ve a clear bias (dashed lines), du e to th e large dela y v alues, but with a fin al estimation v ariance still c lose to the ML estimator’s. In terestingly , the t w o-step pro cedur e leading to (18) pro vides results v ery close to th e optimal ML estima tor, with no apparent bias, in spite of the large dela ys and th e rand om channel fading co efficien ts. The only price paid with the tw o-step pro cedu re, b esides time, is a slight increase of the v ariance due to taking the ratio of tw o n oisy consensus v alues, as evidenced in F ig. 2 b). 5 Concluding remarks In conclusion, in this p ap er we ha v e prop osed a tota lly d ecen tralized sensor n etw ork sc heme capable to reac h globally optimal d ecision tests through lo cal exchange of in formation among the no des, in 16 the presence of asymmetric comm unication c hannels and inh omogeneous time-inv arian t propagation dela ys. The metho d is p articularly useful for app lications where the goal of th e net wo rk i s to take decisions ab out a common even t. Differently from th e a verag e consensus proto cols a v ailable in the literature, our system globally sync hronizes for any set of (finite) p ropagation dela ys if and only if the und erlying digraph is QS C, with a final synchronized state that is a kno wn fu n ction of the sensor measuremen ts. In general, the sync hr onized state d ep ends on the propagatio n parameters, suc h as dela ys and co mmunication c hannels. Nev ertheless, exploiting our clo sed form expression for the final consensus v alues, we hav e sho wn ho w to reco v er an unbiased estimate, f or an y set of d ela ys and c hann el co efficien ts, without the need to kno wing or estimating these co efficient s. T h is desirable result is a distinctiv e prop ert y of the co nsen s us ac hiev able on the state d eriv ative and cannot b e obtained using classical consensus/agreemen t algorithms that reac h a consensu s on the state v ariables. I f w e couple the nice prop erties men tioned ab o ve with th e pr op erties rep orted in [26], where w e sho we d that, in the absence of dela ys, the consensus protocol prop osed in this p ap er and in [26] is also robust against coupling noise, w e hav e, o v erall, a go o d ca nd idate for a distributed sens or net w ork. As in man y engineering problems, the adv an tages of our sc heme come with their own p rices. Three issues th at d eserv e further in v estigations are the follo wing: i) the states gro w linearly w ith time; ii) the co efficien ts a ij are nonnegativ e; and iii) a change of top ology affects the conv ergence prop erties of the prop osed s c heme. The first issue h as an impact on the c hoice of the r adio inte rface r esp onsible for the exc hange of informatio n b etw een th e nod es. T o a v oid the need for transmitting with a high dynamic range, the no des must transmit a nonlinear, b ounded function of the state v alue. One p ossibility , as prop osed in [38], is to asso ciate the state v alue to the ph ase of sinusoidal carrier or to the time shift of a pulse o scillator. The second p oint r equires that the receiv er b e able to comp ensate for p ossible sign in v ersions. As f ar as the switc h ing top ology is conce rn ed, it w ould b e useful to devise metho ds a imed at increasing the r esilience of our method against top ology c hanges. But it is w orth k eeping in mind that the previous a sp ects are only th e r everse of the medal of a metho d capable to ac hiev e a g lobally optimal decision for an y set of dela ys and for asym m etric channels. 6 App endix A Directed Graphs The in teraction among the sensors is prop erly d escrib ed b y a directed graph. F or th e reader’s con- v enience, in this sec tion, we b riefly review the n otation and basic r esu lts of grap h theory that w ill b e used throughout th is pap er. F or the reader inte rested i n a more in-depth study of this field, w e recommend, for exa mple, [39] − [41]. A.1 Basic Definitions T o ta ke explicitly in to ac count the p ossibilit y of unidir ectional links among th e net work n o des, w e represent the information top ology a mong the no des by their (w eigh ted) d irected graph . Directed graph . Given N no des, a (weig hted) directed graph (or digraph) G is defined as G = { V , E } , where V , { v 1 , . . . , v N } is th e set of no d es (or ve rtices) and E ⊆ V × V is a set of ed ges (i .e., or der e d 17 pairs of the no d es), with the con v enti on that e ij , ( v i , v j ) ∈ E (i.e., v i and v j are the head and the tail of the edge e ij , resp ectiv ely) means that the information flo ws fr om v j to v i . A digraph is w eigh ted if a p ositiv e w eigh t is asso ciate to eac h edge, according to a prop er map W : E → R + , su c h that if e ij , ( v i , v j ) ∈ E , then W ( e ij ) = a ij > 0 , otherwise a ij = 0 . W e fo cus in th e follo wing on we ight ed digraphs wh ere the weigh ts of lo ops ( v i , v i ) are ze ro, i.e., a ii = 0 for all i. If ( v i , v j ) ∈ E ⇔ ( v j , v i ) ∈ E (and a ij = a j i , ∀ i 6 = j ), then the graph is said t o b e (w eighte d) undir e cte d. F or an y no de v i ∈ V , w e define the information neigh b or of v i as N i , { j = 1 , . . . , N : e ij = ( v i , v j ) ∈ E } . (21) The set N i represent s the set of indices of the n o des send ing data to n o de i . The in-d egree and out-degree of n o de v i ∈ V are, resp ective ly , defined as: deg in ( v i ) , N X j =1 a ij , and deg out ( v i ) , N X j =1 a j i . (22) Observe that for undirected grap h s, deg in ( v i ) = deg out ( v i ) . W e ma y ha v e the follo wing cl ass of digraphs . Balanced digraph The no de v i of a digraph G = { V , E } is said to b e b alanc e d if and only if it s in-degree and out-deg ree coincide, i.e. , deg in ( v i ) = deg out ( v i ) . A digraph G = { V , E } is called b alanc e d if and only if all its n o des are balanced, i.e., N X j =1 a ij = N X j =1 a j i , ∀ i = 1 , . . . , N . (23) P ath/cycle A str ong p ath (or dir ected c hain) in a digraph G = { V , E } is a sequence of distinct no des v 0 , . . . , v q ∈ V such that ( v i , v i − 1 ) ∈ E , ∀ i = 1 , . . . , q . If v 0 ≡ v q , the path is s aid to b e close d. A w e ak path is a sequence of distinct no d es v 0 , . . . , v q ∈ V such that either ( v i − 1 , v i ) ∈ E or ( v i , v i − 1 ) ∈ E , ∀ i = 1 , . . . , q. A (strong) c yc le (or circuit) is a c losed (strong) path. Directed tree/forest A digraph with N n o des is a ( ro oted) dir e cte d tr e e if it has N − 1 edges and there exists a d istinguished nod e, ca lled the r o ot no d e, whic h can r eac h al l the other n o des b y a (unique) strong path. T h us a d irected tree cannot hav e cycles and ev ery n o de, except the ro ot, has one and only one incoming edge. 13 A digraph is a (directed) for est if it consists of one or more directed trees. A subgraph G s = { V s , E s } of a digraph G = { V , E } , with V s ⊆ V and E s ⊆ E ∩ ( V s × V s ) , is a sp anning directed tree (or a sp anning d ir ected forest), if it is a d irected tree (or a directed f orest) and it has the same no de set as G , i.e., V s ≡ V . W e sa y that a digraph G = { V , E } con tains a spanning tree (or a spanning forest) if th ere exists a subgraph of G that is a spanning directed tree (or a s p anning directed forest). Connectivit y . In a digraph there are man y degrees of co nn ectedness. In this pap er we fo cus on the follo wing. A digraph is Str ongly Connected (SC) if, for every pair of no d es v i and v j , ther e exists a strong path from v i to v j and vicev ersa. A digraph is Q uasi - Str ongly Connected (QSC) if, for every 13 Observe that some literature (e.g., [20, 21]) defines this concept using the opp osite conv ention for the orientation of the ed ges. 18 pair of nod es v i and v j , there exists a no de r that can reac h b oth v i and v j b y a str ong path. A digraph is we akly connected (W C) if any p air of distinct no des can b e joined by a we ak path. A digraph is disc onne cte d if it is not weakly connected. According to the ab o v e definitions, it is str aightforw ard to see that strong connectivit y implies quasi strong connectivit y a nd t hat quasi strong co nnectivit y implies wea k conn ectivit y , but the conv erse, in general, do es not hold. F or u ndirected graphs instead, the ab o v e n otions of connectivit y are equiv alent : An undir ected graph is connected if any t w o distin ct no des can b e joined by a path. Moreo v er, it is easy to c hec k that the quasi strong connectivit y of a d igraph is equiv alen t to t he existence o f at least one spannin g directed tree in the g raph (see, e.g., [42, p. 13 3 ]). Condensation Digraph When a d igraph G i s W C, it m a y still cont ain strongly connected subgrap h s. A maximal sub graph of G whic h is also S C is called Str ongly Conne cte d Comp onent (SCC ) of G 14 [40]. Using this concept, an y digraph G = { V , E } can b e p artitioned into S C Cs, l et us sa y G 1 , { V 1 , E 1 } , . . . , G K , { V K , E K } , where V j ⊆ V and E j ⊆ E denote the s et of no des and e dges lying in the j - th S CC, resp ectiv ely . Using this structure, one can reduce the original digraph G to th e so called c ondensation digraph G ⋆ = { V ⋆ , E ⋆ } , by substituting eac h no de set V i of ea c h SCC G i of G with a distinct n o de v ⋆ i ∈ V ⋆ of G ⋆ , and introdu cing an edge in G ⋆ from v ⋆ i to v ⋆ j if an d only if there exists some edges fr om the i -t h S CC G i and the j -th S C C G j [40, Ch. 3.2]. An SCC that is reduced to the ro ot no de of a d irected tree of the conden sation digraph is called R o ot SC C (RSCC). Observe th at, by definition, the condensation d igraph has no cycles [40, Lemm a 3.2.3]. Buildin g on this prop ert y , we ha v e the follo wing. Lemma 1 L e t G ⋆ = { V ⋆ , E ⋆ } b e the c ondensation digr aph of G , c omp ose d by K no des. Then, the no des of G ⋆ c an always b e or der e d as v ⋆ 1 , . . . , v ⋆ K ∈ V ⋆ , so that al l the existing e dges in G ⋆ ar e i n the form ( v ⋆ i , v ⋆ j ) ∈ E ⋆ , with 1 ≤ j < i ≤ K, (24) wher e v ⋆ 1 has zer o in-de gr e e . The ord ering v ⋆ 1 , . . . , v ⋆ K satisfying (24) can b e obtained by the follo wing iterativ e pro cedur e. Start- ing from v ⋆ 1 , remo v e v ⋆ 1 and all its out-coming edges from G ⋆ . Since the reduced d igraph with K − 1 no des has n o (strong) cycles by construction, there must exist a no de with zero in-degree in it. Let u s denote su c h a no d e by v ⋆ 2 . T h en, no edges in the form ( v ⋆ 2 , v ⋆ j ) , with j > 2 , can exist in the redu ced digraph (and thus in G ⋆ ). This justifies (24) for i = 2 a nd j = 1 , 2 . T h e rest of (24), for j > 2, is obtained by rep eating the same pr o cedure on th e remaining no d es. The connectivit y prop erties of a d igraph are rela ted to the structure of its c ondensation digraph , as giv en in the f ollo wing Lemma (we omit the p ro of b ecause of space limitations). Lemma 2 L e t G ⋆ b e the c ondensation digr aph of G . Then: i) G is SC if and only if G ⋆ is c omp ose d by a single no de; ii) G is QSC if and only if G ⋆ c ontains a sp anning dir e cte d tr e e ; iii) if G is WC, then G ⋆ c ontains either a sp anning dir e cte d tr e e or a (we akly) c onne cte d dir e cte d for est. The concept of condensation digraph is useful to understand the n et w ork sync hronization b eha vior, as sh o wn in Section 3. A similar idea wa s already used in [10, 21] to study leadership p roblems in co ordinated multi-a gen t systems. 14 Maximal means that there is no larger SC sub graph containing th e no des of the considered comp onent. 19 A.2 Spect ral prop erties of a Digraph W e r ecall now some basic r elationships b et w een the connectivit y prop erties of t he d igraph and the sp ectral prop erties of the matrices asso ciated to th e d igraph, since th ey pla y a fu ndamenta l role in the stabilit y analysis of t he system prop osed in this paper. In the f ollo wing, we d en ote b y 1 N and 0 N the N -length column v ector of al l ones and ze ros, resp ectiv ely . Giv en a d igraph G = { V , E } , we introdu ce the follo wing matrices asso ciated to G : • Th e N × N adjac ency matrix A is composed of entries [ A ] ij , a ij , i, j = 1 , . . . , N , equal to the w eigh t associated with the ed ge e ij , if e ij ∈ E , o r equal to zero, o therwise; • Th e de gr e e matrix ∆ is a diagonal matrix with diagonal entries [ ∆ ] ii , d eg in ( v i ); • Th e (w eigh ted) L aplacian L is defined as [ L ] ij , X N k 6 = i =1 a ik , if j = i, − a ij if j 6 = i. (25) Using the adj acency matrix A and the degree matrix ∆ , the Laplacian can b e r ewritten in compact form as L , ∆ − A . 15 By defi n ition, t he Laplacia n matrix L in (25) has the follo w in g prop erties: i) it is a diagonall y dominan t matrix [43]; ii) it has zero row sums; and iii) it has nonn egativ e diagonal elemen ts. F rom i)-iii), in vo king Ger ˇ sgorin’s disk Theorem [43], w e ha v e that zero is an eigen v alue of L corresp onding to a r igh t eigenv ector in the Null { L } ⊇ span { 1 N } , i.e., L 1 N = 0 N , (26) while all the other eigen v alues ha v e p ositiv e real part. This also means that rank( L ) ≤ N − 1 . Moreo v er, from (23) and (26), it turns out that b alanc e d digraphs can b e equiv alently charact erized in te rms of the Laplac ian matrix L : A digraph is b alanced if and only if 1 N is also a left eig env ector of L asso ciated w ith the zero eigen v alue, i.e., 1 T N L = 0 T N , (27) or equiv alen tly 1 2 ( L + L T ) is p ositiv e semidefinite. The relationship b etw een th e connectivit y pr op erties of a d igraph and the sp ectral prop erties of its Laplacian matrix are given by the f ollo wing. Lemma 3 L e t G = { V , E } b e a digr aph with L aplacian matrix L . The multiplicity of the zer o eigenvalue of L is e qual to the minimum numb er of dir e cte d tr e es c ontaine d in a sp anning dir e cte d for est of G . Corollary 2 The zer o ei genvalue of L is simple if and only if G c ontains a sp anning dir e cte d tr e e (or, e qu i valently, it is QSC). 15 Observe th at the definition of Laplacian matrix as giv en in (25) coincides with that used in the classical graph theory literature, except for the conve ntion we adopted in the orientation of the edges. This leads to L expressed in terms of the in-degrees matrix, rather than of th e out-degrees matrix. Our choice is motiv ated b y the physical interpretatio n we ga ve to the edges’ weig hts, as detailed in Section 2.2. 20 Lemma 3 comes directly form Theorem 9 an d Theorem 10 of [44]. C orollary 2 was in dep end en tly pro ve d in many pap ers, such as [9, Corollary 2], [20, Lemma 2]. Obs er ve that, since the strong connectivit y of the digraph implies QS C , the results p r o vided in [8, 21] for S C digraphs, can b e obtained as sp ecial case of Corollary 2. Sp ecifically , w e hav e the follo wing. Corollary 3 L et G = { V , E } b e a digr aph with L aplacian matrix L . If G is SC, then L has a simple zer o eigenvalue and a p ositive left-eigenv e ctor asso ciate d to the zer o eig envalue. According to Corollary 2 , b ecause of (26), th e Laplacian of a QS C digraph has an isolate d eigen v alue equal to zero, corresp onding to a r igh t eigen ve ctor in th e span { 1 N } . Obser ve that, for undir e cte d graphs, Corolla ry 3 can b e stated as follo ws: r ank( L ) = N − 1 if and only if G is connected [ 39]. F or directed graphs, instead, the “ only if” p art d o es not hold. W e deriv e no w the structure of th e left-eigen v ector γ of the Laplacian matrix L asso ciated to the zero eige nv alue, as a function of the n et w ork top ology . This result is instrumen tal to pro v e the main theorem of this pap er. W e h a v e the follo wing. Lemma 4 L e t G = { V , E } b e a digr aph with N no des and L aplacian matrix L . A ssume that G is QSC with K SCC’s G 1 , { V 1 , E 1 } , . . . , G K , { V K , E K } , with V i ⊆ V , E i ⊆ E , | V i | = r i and P i r i = N , num- b er e d w.l.o.g. so that G 1 c oincides with the RSCC of G . Then, the left-eigenve ctor γ = [ γ 1 , . . . , γ N ] T of L asso ciate d to the zer o ei genvalue has the fol lowing structur e γ i = ( > 0 , iff v i ∈ V 1 , = 0 , otherwise. (28) If G 1 is also b alanc e d, then γ r 1 , [ γ 1 , . . . , γ r 1 ] T ∈ span { 1 r 1 } , wher e r 1 , | V 1 | . Pro of. Since the digraph G is QSC, the set V 1 con tains either all N or 0 < r 1 < N no des of G . In the former case, V 1 ≡ V and thus the digraph is SC , by d efinition. Hence, acco rd in g to Corollary 3 (cf. App endix A.2), th e Laplacian matrix L ( G ) h as a simple zero eigen v alue w ith left-eigen v ector γ > 0 . If, in addition, G is balanced (and t hus also SC ), then γ ∈ span { 1 N } . W e consider no w the latter case, i.e., 0 < r 1 < N . According to Lemma 2, the cond ensation digraph G ⋆ = { V ⋆ , E ⋆ } of G con tains a spanning d irected tree comp osed b y K n o des v ⋆ 1 , . . . , v ⋆ K ∈ V ⋆ (asso ciated to the K SCCs G 1 , . . . , G K ), with ro ot no de v ⋆ 1 (asso ciated to the SCC G 1 of G ). F rom Lemma 1, we assume, w.l.o .g., that the no d es v ⋆ 1 , . . . , v ⋆ K ∈ V ⋆ are ord er ed according to (24), so that the L aplacian matrix of G ⋆ b e a lo wer triangular matrix. Using th e relationship b et w een the original digraph G and its condensation d igraph G ⋆ (cf. Ap- p endix A.1), the Laplacian matrix L ( G ) of G can b e written as a lo wer blo ck triangular matrix, i.e. L ( G ) = L 1 0 . . . 0 ∗ B 2 . . . . . . ∗ ∗ . . . 0 ∗ . . . ∗ B K , (29) with L 1 = L ( G 1 ) ∈ R r 1 × r 1 denoting the r 1 × r 1 Laplacian matrix asso ciated to the ro ot SCC G 1 , and B k = L k + D k ∈ R r k × r k , where L k = L ( G k ) is the r k × r k Laplacian matrix of the k -th SCC G k 21 of G and D k is a nonnegativ e d iagonal matrix whose i -th e ntry is equal to the sum of the wei ghts asso ciated to the edges outgoing from the no d es in G 1 , . . . , G k − 1 and incoming in the i -th n o de in G k . 16 Observe th at, since G is QSC, eac h D k has at least one p ositiv e entry; otherwise the SCC G k w ould b e decoupled from the other SCCs. Since eac h G k is S C b y defin ition, we ha v e rank( L k ) = r k − 1 (cf. C orollary 3) and Null( L k ) = span( 1 r k ) (see (26)). Usin g these prop erties and the fact that D k 1 r k 6 = 0 r k , w e ha ve that the ro ws (columns) of L k + D k are linearly indep endent , or equiv alen tly , rank( B k ) = r k , ∀ k = 2 , . . . , K. (30) Using (29) and (30), w e deriv e no w the structure of the left-ei genv ector γ o f L ( G ) in (29). Pa rti- tioning γ = [ γ T r 1 , γ T r 2 , . . . , γ T r K ] T according to (2 9), with γ r k ∈ R r k , we ha v e γ T r 1 L 1 = 0 T r 1 and γ T r k B k = 0 T r k , k = 2 , . . . , K , (31) whic h, using C orollary 3 and (30 ), provides γ r 1 > 0 r 1 and γ r k = 0 r k , k = 2 , . . . , K, (32) resp ectiv ely . If , in addition, G 1 is b alanced, then γ r 1 ∈ s p an { 1 r 1 } . B Preliminary Results on Linear F unctional Differen tial Equations In this s ection, we in tro d uce some basic definitions on linear functional differen tial equations and pr o v e some in termediate results that will b e extensiv ely u sed in the pr o of of Theorem 1, as giv en in App endix C. T o form ally introdu ce the concept of fu nctional d ifferential equations, we need the follo wing nota- tions: let R N b e an N -dimensional linear v ector space o v er the real num b er s with v ector norm k·k ; de- noting by τ the maxim um time d ela y of the system, let C , C [ − τ , 0] , R N [or C 1 , C 1 [ − τ , 0] , R N ] b e the Banac h space of con tin uous (or con tin uously differentia ble) fu nctions mapping the interv al [ − τ , 0] to R N with the top ology of uniform co nv ergence, i.e., for any φ ∈ C (or φ ∈ C 1 ) the n orm of φ is defined as | φ | s = su p − τ ≤ ϑ ≤ 0 k φ ( ϑ ) k . Since in this p ap er w e considered only linear coup ling among the differentia l equatio ns as given in (7), we fo cus on Line ar homo gene ous Dela y ed Differentia l E q u ations (LDDEs) with a finite n umb er of heterogeneous non-commensurate dela ys 17 [48]-[51]: · x i ( t ) = k i X j ∈N i a ij ( x j ( t − τ ij ) − x i ( t )) , i = 1 , . . . , N , t > t 0 , (33) where k i is an y arbitrary p ositiv e constan t. Equ ation (33) m eans that the deriv ativ e of the state v ariables x at time t dep ends on t and x ( ϑ ) , f or ϑ ∈ [ t − τ , t ] . Hence, to uniquely sp ecify the ev olution 16 W e assume, w.l.o.g., that in eac h SCC G k the n od es are num b ered from 1 to r k . 17 Observe that the LDDE (33) falls in the more general class of LDDE’s stud ied in [48]-[50]. In fact, it is straigh tforw ard to chec k that LDDE (33) can be rewritten in th e canonical form of [48 , Ch. 6, Eq. ( 6.3.2)], [50 , Ch. 3, Eq. (3.1)]. 22 of the state b ey ond time t 0 , it is r equired to sp ecify the initial state v ariables x ( t ) in a time in terv al of length τ , from t 0 − τ to t 0 , i.e., x i ( t 0 + ϑ ) = φ i ( ϑ ) , ϑ ∈ [ − τ , 0] , i = 1 , . . . , N . (34) Here a fter, the initi al conditions φ = { φ i } i are a ssum ed to b e tak en in the set C 1 β of (c onti nuously differen tiable) functions th at are b ounded in the n orm 18 | φ | s = su p − τ ≤ ϑ ≤ 0 k φ ( ϑ ) k ∞ , i.e., C 1 β , ( φ ∈ C 1 : | φ | s = sup − τ ≤ ϑ ≤ 0 k φ ( ϑ ) k ∞ ≤ β < + ∞ ) . (35) Giv en φ ∈ C 1 β and t 0 , let x [ t 0 , φ ]( t ) denote the fun ction x at time t , with in itial v alue φ at time t 0 , i.e., x ( t 0 + ϑ ) = φ ( ϑ ) , with ϑ ∈ [ − τ , 0] . F or th e sake of notation, we define x [ φ ]( t ) , x [0 , φ ]( t ) . A fun ction x [ t 0 , φ ]( t ) is said to b e a so lution to equation (33) on [ t 0 − τ , t 0 + t 1 ) with initial v alue φ at time t 0 , if there exist t 1 ≥ 0 su c h that: i) x ∈ C ([ t 0 − τ , t 0 + t 1 ] , R n ) ; ii) x [ t 0 , φ ]( t ) satisfies (33), ∀ t ∈ [ t 0 , t 0 + t 1 ]; and iii) x ( t 0 + ϑ ) = φ ( ϑ ) , with ϑ ∈ [ − τ , 0] . It follo ws from [50, Theorem 1.2] th at suc h a solution to equation (33 ) exists and is unique. W e fo cus now on tw o concepts related to the tra jectories o f (3 3 ), n amely b oun dedness and s tabilit y . Definition 2 Given system (33), a solution x [ t 0 , φ ]( t ) is b ounded if ther e exists a β = β ( t 0 , φ ) such that k x [ t 0 , φ ]( t ) k < β ( t 0 , φ ) for t ≥ t 0 − τ . The solutions ar e un iformly b ounded if, for any α > 0 , ther e exists a β = β ( α ) > 0 such that for al l t 0 ∈ R , φ ∈ C and | φ | s < α we have k x [ t 0 , φ ]( t ) k < β for al l t ≥ t 0 . As f ar as th e stability n otion is concerned, it is not at all differen t from its coun terpart for unretarded systems, except for the differen t assum ptions on the initial conditions. The in terested reader m a y refer, e.g., to [50, 51] for an in-depth treatment of this topic. W e fo cu s here on effectiv e methods on pro ving the stability of LDDEs. Since system (33) is linear, th e stabilit y analysis can b e carried out either in the time-domain [50, 51] or in the frequen cy-domain [48, 49], as for classical ordinary differentia l equations (see, e.g., [52]). In th is p ap er w e fo cus on the latter approac h. Th e same conclusions can also b e obtained using the time-domain analysis, based on Ly apunov-Kraso vskii functional [53]. Be fore stating the ma jor result, we need first the fol lo wing in termediate definitions. Let C + = { s ∈ C : Re { s } > 0 } , C − = { s ∈ C : Re { s } < 0 } , and C + b e the closure of C + , i.e., C + = { s ∈ C : Re { s } ≥ 0 } . Denoting by H n × m the set of n × m matrices wh ose en tries are analytic 19 and b ound ed fu nctions in C + , let us intro d uce the N × N diagonal degree matrix ∆ ≥ 0 N × N and th e complex matrix H ( s ) ∈ C N × N , d efined resp ectiv ely a s ∆ , diag ( k 1 deg in ( v 1 ) , ..., k N deg in ( v N )) and [ H ( s )] ij , ( 0 , if i = j, k i a ij e − sτ ij , if i 6 = j, (36) with deg in ( v i ) give n in (22) (see App endix A). Observe th at H ( s ) ∈ H N × N . W e can now p ro vide the main result of this section, stated in th e follo wing lemma. 18 W e u sed, without loss of generalit y , as ve ctor norm k·k in R N the infinity norm k·k ∞ , defined as k x k ∞ , max i | x i | . 19 A complex function is said to b e analytic (or holomorphic) on a region D ⊆ C if it is complex differentiable at every p oint in D , i.e., for any z 0 ∈ D the function satisfies the Cauch y-Riemann equations and h as con tinuous first partial deriv ativ es in th e neighborho o d of z 0 (see, e.g., [54, Theorem 11.2] ). 23 Lemma 5 Given system (33), assume that the fol lowing c onditions ar e satisfie d: b1. The initial value functions φ ∈ C 1 β , and the solutions x [ φ ]( t ) ar e b ounde d; b2. The char acteristic e quation asso ciate d to (33) p ( s ) , det ( s I + ∆ − H ( s )) = 0 , (37) with ∆ a nd H ( s ) define d in (36), has a l l r o ots { s r } r ∈ C − , with at most one simple r o ot at s = 0 . 20 Then, system (33) is mar g i nal ly sta ble, i.e., ∀ φ ∈ C 1 β and Re { s 1 } < c < 0 , ther e exist t 1 and α , with t 0 < t 1 < + ∞ and 0 < α < + ∞ , indep endent of φ , and a ve ctor x ∞ , with k x ∞ k < + ∞ , such that k x [ φ ]( t ) − x ∞ k ≤ α | φ | s e ct , ∀ t > t 1 . (38) Pro of. Under assumption b1 ), according to [48, Th eorem 6.5], the stabilit y p rop erties of system (33) are fu lly determined b y the ro ots of the charac teristic equation associated to (33), as detailed next. 21 Denoting b y M = { Re { s r } : p ( s r ) = 0 } the set of real p arts of the charact eristic roots { s r } r , it f ollo ws from [48, Theorem 6.7] that, ∀ φ ∈ C 1 β and c / ∈ M , there exist t 1 and α, with 0 < t 1 < + ∞ and 0 < α < + ∞ i nd ep endent on φ , suc h that x [ φ ]( t ) − lim l → + ∞ X s r ∈ C l : Re { s r } >c p r ( t ) e s r t ≤ α | φ | s e ct , ∀ t > t 1 , (39) where eac h p r is a (v ectorial) p olynomial of degree less than the multiplicit y of s r , C l denotes a cont our in the complex plane of radius increasing with l and cen tered around s = 0 (see [48, Sec. 4.1] for more details on ho w suc h con tours C l need to b e c hosen), and the sum in (39) is tak en o ve r all c haracteristic ro ots s r within the conto ur C l and to th e righ t of the line Re { s r } = c. Ob s erv e that, since the num b er of suc h r o ots is fi nite 22 [50, Theorem 1.5] (see also [48, Ch. 6 .8 and Ch. 12]), the limit in (39) is alw a ys w ell-defined. Using (39), we pro v e no w that, und er b2), system (33) is marginally stable. In v oking th e prop ert y that, for an y give n γ ∈ R , the n umb er of c haracteristic r o ots s r with Re { s r } > γ is finite, one can alw a ys c ho ose the constant c / ∈ M in (39) so that Re { s 1 } < c < Re { s 0 } = 0 , w hic h l eads to k x [ φ ]( t ) − p 0 k ≤ α | φ | s e ct , ∀ t > t 1 , (40) where we h a v e explicitly used t he a ssu m ption that the (p ossible) root s 0 = 0 is simple and that there are no r o ots with p ositiv e real part. It follo ws from [48, C orollary 6.2 ] that this condition is also sufficien t to guaran tee that p 0 is b ounded, i.e., k p 0 k < + ∞ . Setting in (40) x ∞ = p 0 , we obtain (38), whic h c ompletes the pro of. 20 W e assume, w.l.o.g., th at t he roots { s r } are arranged in nonincreasing order with resp ect to the real part, i.e., 0 = Re { s 0 } > Re { s 1 } ≥ Re { s 2 } ≥ ... . 21 Observe that assumpt ion b1) is only sufficient for the existence of the Laplace transform of the solutions to (33). 22 The reader who is familiar with Linear Retarded F unctional Differen tial Equations (LRFDE) ma y observe that this result comes directly from t he fact that the c haracteristic equation (37) does not h a ve neutral roots [48, Ch. 12]. 24 Remark 1. It follo ws from Lemma 5 that, un der assumptions b1 ) - b2) , all the solutions to (33) asymptotically con v ergence to the constan t vecto r x ∞ . Moreo v er, equation (38) provides an estimate of the conv er gence rate o f the system: as for systems without dela ys, the con v ergence sp eed of ( 33 ) is exp onenti al 23 with rate arb itrarily close to Re { s 1 } that, in g eneral, dep ends on net w ork topology a nd dela ys. Remark 2. L emma 5 generalizes r esults of [49, 50], where the authors pro vided alternativ e conditions for the asymptotic stabilit y o f a Linear Retarded Differen tial Equ ation (LRDE). In terestingly , Lemma 5 conta ins some of the conditions of [49, 50] as a sp ecial case: System (33) is asymptotical ly s table if all the characte ristic ro ots of (37) ha v e negativ e real part [see (38)]. This conclusion is the same as that for linear u nretarded systems (see, e.g., [52]). Moreo v er, Lemma 5 can b e easily ge neralized to include the case s in which one is in terested in “oscilla tory” behaviors of system (33). It is s traigh tforw ard to s ee that b ounde d oscillations arise if assumption b2) is replaced by the follo wing condition: All the r o ots of c haracteristic equation (37) ha v e nega tiv e real part and the ro ots with zero real part are simple. C Pro of of Theorem 1 In the follo wing, for the sak e of notation simplicit y , w e drop the dep end en ce of th e state fu nction from the observ ation, as this d ep enden ce does not play an y role in our pro of. C.1 Sufficiency W e prov e that, under a1) - a3) , the quasi strong connectivit y of digraph G asso ciated to the net w ork in (7) is a sufficient condition for the system (7) to sync hronize a nd that the syn c hronized state is give n b y (11). T o this end, w e orga nize the pro of ac cording to the fol lo wing t w o steps. W e first show th at, under a1) - a2) and the quasi-strong connectivit y of G , the set o f LRFDEs (7) admits a solutio n in the f orm x ⋆ i ( t ) = αt + x ⋆ i, 0 , i = 1 , . . . , N , (41) if α = ω ⋆ , where ω ⋆ is defined in (11) and { x ⋆ i, 0 } are constan ts that dep end in general on the system parameters and the initial co nd itions. This guaran tees the exist ence of the desired syn c hronized s tate (cf. D efinition 1). T hen, inv oking resu lts of App endix B, we pro v e that, under a1) - a3) and the quasi- strong connectivit y of G , suc h a synchronized sta tes is also globally asymptotically stable (according to Definition 1). C.1.1 Existence of a sync hronized stat e Let us assu me that conditions a1) - a2) are satisfied and that G = { V , E } asso ciated to (7) is Q SC. The sync hron ized state in the form (41 ) is a solution to (7) if and only if it satisfies e quations (7) (cf. App endix B), i.e ., if and only if there exist α and { x ⋆ i, 0 } suc h that the follo wing sys tem of linear equations is feasible: c i ∆ ω i ( α ) K + X j ∈N i a ij x ⋆ j, 0 − x ⋆ i, 0 = 0 , ∀ i = 1 , . . . , N , (42) 23 W e say that x ( t ) conv erges ex p onential ly tow ard x ∞ with rate r < 0 if k x ( t ) − x ∞ k ≤ O ` e r t ´ . 25 where ∆ ω i ( α ) , g i ( y i ) − α 1 + K c i X j ∈N i a ij τ ij . (43) In tro d u cing the w eigh ted Laplac ian L = L ( G ) asso ciated to digraph G (cf. S ection A), the system in (42) can be equiv alen tly rewritten as Lx ⋆ 0 = 1 K D c ∆ ω ( α ) , (44) where x ⋆ 0 , [ x ⋆ 1 , 0 , . . . , x ⋆ N , 0 ] T , D c , d iag( c 1 , . . . , c N ) , and ∆ ω ( α ) , [∆ ω 1 ( α ) , . . . , ∆ ω N ( α )] T , with ∆ ω i ( α ) defined in (43). Ob serv e t hat, under a1) - a2) and the quasi-strong co nn ectivit y of G , the graph Laplacian L has the follo win g p r op erties (cf. Corollary 2): rank( L ) = N − 1 , N ( L ) = span { 1 N } , and N ( L T ) = span { γ } , (45) where N ( L ) denotes the (righ t) n ull-space of L , and γ is a le ft eigen v ector of L corresp onding to the (simple) zero eige nv alue of L , i.e., γ T L = 0 T . Assume no w that α is fixed. It follo ws from (45) that, for an y given α, system (44) admits a solution if and only if D c ∆ ω ( α ) ∈ span { L } . Beca use of (45 ), w e ha v e D c ∆ ω ( α ) ∈ span { L } ⇔ γ T D c ∆ ω ( α ) = 0 . (46) It is easy to chec k that the v alue of α that s atisfies (4 6) is α = ω ⋆ , w ith ω ⋆ defined in (11). Hence, if α = ω ⋆ , the syn c hronized state in the form (41) is a solution to (7), for any giv en set of { τ ij } , { g i } , { c i } , { a ij } and K 6 = 0. The structure of the left ei gen vec tor γ asso ciated to the zero eigen v alue of L as giv en in (11) comes directly fr om Lemma 4 . Setting α = ω ⋆ , system (44) admits ∞ 1 solutions, give n b y x ⋆ 0 = 1 K L ♯ D c ∆ ω ( ω ⋆ ) + span { 1 N } , x 0 + span { 1 N } , (47) where x 0 , 1 K L ♯ D c ∆ ω ( ω ⋆ ) , (48) ∆ ω i ( ω ⋆ ) is obtained b y (43) setting α = ω ⋆ and L ♯ A is the generalized in v erse of the Laplac ian L [56 ]. C.1.2 Global Asymptotic Stability of the Synchroniz ed State T o pro v e the gl obal asymp totic stabilit y of the sync hronized state o f system (7), w hose existence h as b een pro v ed in Ap p endix C.1.1, w e use the follo wing intermediate result (see App endix B for the definitions used in the lemma). Lemma 6 ([55, Theorem 2.2]) L et H ( s ) ∈ H N × N and ρ ( H ( s )) denote the sp e ctr al r adius of H ( s ) . Then, ρ ( H ( s )) is a subharm onic 24 b ounde d (ab ove) function on C + . 24 See, e.g., [54, Ch. 12], [55], for the defin ition of sub harmonic function. 26 W e first rewr ite system (7) in a m ore con v enient form , as detailed n ext. Consider th e follo wing c hange of v ariables Ψ i ( t ) , x i ( t ) − ( ω ⋆ t + x i, 0 ) , i = 1 , . . . , N , (49) where ω ⋆ and { x i, 0 } are defined in (11) and (48), resp ectiv ely , so that the original system (7) c an b e equiv alentl y rewritten in terms of th e new v ariables { Ψ i ( t ) } i as ˙ Ψ i ( t ) = ∆ ω i ( ω ⋆ ) + K c i X j ∈N i a ij (Ψ j ( t − τ ij ) − Ψ i ( t ) + x j, 0 − x i, 0 ) , Ψ i ( ϑ ) = φ i ( ϑ ) , e φ i ( ϑ ) − ω ⋆ ϑ − x i, 0 , ϑ ∈ [ − τ , 0] , i = 1 , . . . , N , t ≥ 0 , (50 ) where e φ are the initial v alue fu nctions of the original system (7). Using (4 8) [see also (42), with α = ω ⋆ ], system (50) b ecomes ˙ Ψ i ( t ) = k i X j ∈N i a ij (Ψ j ( t − τ ij ) − Ψ i ( t )) , Ψ i ( ϑ ) = φ i ( ϑ ) , ϑ ∈ [ − τ , 0] , i = 1 , . . . , N , t ≥ 0 , (51) where, for the sake of c onv enience, we defined k i , K /c i > 0 , for i = 1 , . . . , N . It follo ws from (51 ) that the sync hronized state of system (7), as giv en in ( 41), is globally asymp- totical ly stable (according to Definition 1) if system in (51) is marginally stable (cf. App endix B). T o pro ve the marginal stabilit y of system (51), it is sufficient to sho w th at system (51) satisfies Lemma 5. T o this end, w e orga nize the rest of the pr o of in the follo wing t wo steps. Step 1. W e sho w that, un der a1) , a3), all the solutions Ψ [ φ ]( t ) to system (51) are un iformly b oun ded, as required b y assump tion b1) of Lemma 5; Step 2. W e prov e that, under a1) - a3) and the q u asi-strong connectivit y of the digraph , the charac- teristic equ ation asso ciated to system (51) has all the ro ots in C − and a simple ro ot in s = 0 , whic h sat isfies assumption b2) of Lemma 5. Step 1. Giv en any arbitrary β < + ∞ , assumptions a1) , a3) are sufficien t to guaran tee that all the tra jectories of (51) are u niformly b ounded (cf. Defin ition 2), as shown next. Sin ce φ ∈ C 1 β , we ha ve (see (35)) | Ψ i ( ϑ ) | ≤ β , ∀ i = 1 , . . . , N , ϑ ∈ [ − τ , 0] . (52) Condition (5 2) is sufficien t for { Ψ i [ φ ]( t ) } to be uniformly b ounded for all t > 0 . In fact, assu me th at { Ψ i [ φ ]( t ) } are not b ound ed. Th en, according to Definition 2 of App endix B, there must exist some t > 0 and a set J ⊆ { 1 , . . . , N } suc h that 25 k Ψ ( t ) k ∞ ≤ β , ∀ t < t, (53) and | Ψ j t | = β and · Ψ j ( t ) = ( < 0 , if Ψ j t = − β , > 0 , if Ψ j t = β , j ∈ J . (54) This wo uld imply that, for some t > t, | Ψ j t | > β . Giv en ( 53)-(54) and j ∈ J , w e ha v e t wo p ossib ilities, namely: 25 F or the sake of notation, w e omit in the follo wing the depen dence of Ψ [ φ ]( t ) on φ . 27 i) Ψ j t = β and · Ψ j ( t ) > 0 . Since | Ψ i ( t − τ j i ) | < β , ∀ i = 1 , . . . , N (see (53 )) and k j > 0, from (51) w e ha ve · Ψ j ( t ) = k j X i ∈N j a j i Ψ i ( t − τ j i ) − Ψ j t = k j X i ∈N j a j i Ψ i ( t − τ j i ) − β ≤ 0 , (55) where in the last inequ alit y , w e used (52). Expr ession (55) con tradicts the assu mption · Ψ j ( t ) > 0 . ii) Ψ j t = − β and · Ψ j ( t ) < 0 . Ho we ver, since · Ψ j ( t ) = k j X i ∈N j a j i Ψ i ( t − τ j i ) − Ψ j ( t ) = k j X i ∈N j a j i Ψ i ( t − τ j i ) + β ≥ 0 , (56) a contradict ion with · Ψ j ( t ) < 0 results. Th us, any solution Ψ [ φ ]( t ) to (51) is b oun ded and r emains in C 1 β for any t > 0 . Step 2. W e stud y no w the c haracteristic equation (37) asso ciated to system (51), assuming that a1) - a3) are satisfied and th at digraph G is QSC. First o f al l, observ e that, since ∆ − H (0) = K D c L , w e hav e p (0) = det ( ∆ − H (0)) = K d et ( D c ) det ( L ) = 0 , (57) where ∆ and H ( s ) are defin ed in (36), and the last equalit y in (57 ) is d u e to the pr op erties of Laplacian matrix L = L ( G ) of digraph G (see (26)). It follo ws f rom (57) that p ( s ) has a ro ot in s = 0 , corresp ondin g to the zero eigen v alue of the Laplacian L (recall that K det ( D c ) 6 = 0). S in ce the digraph is assumed to b e QSC , according t o Corolla ry 2, such a ro ot is simple. Th us, to complete the pr o of, w e need to show th at p ( s ) d o es not ha v e any solution in C + \{ 0 } , i.e., det ( s I + ∆ − H ( s )) 6 = 0 , ∀ s ∈ C + \{ 0 } . (58) Since s I + ∆ is nonsin gular in C + \{ 0 } [recall th at, u nder a1) , ∆ ≥ 0 , with at least one p ositiv e diagonal ent ry], (58) is equiv alen t t o det I − ( s I + ∆ ) − 1 H ( s ) 6 = 0 , ∀ s ∈ C + \{ 0 } , (59) whic h le ads to the follo wing sufficien t co nd ition for (58): ρ ( s ) , ρ ( s I + ∆ ) − 1 H ( s ) < 1 , ∀ s ∈ C + \{ 0 } . (60) Since ( s I + ∆ ) − 1 ∈ H N × N and H ( s ) ∈ H N × N (cf. App endix B), it follo ws from Lemma 6 that the sp ectral r adius ρ ( s ) in (60 ) is a subh armonic f u nction on C + . As a d ir ect consequence, w e ha v e, among all, that ρ ( s ) is a c onti nuous b oun ded function on C + 26 and satisfies the ma ximum mo dulus principle (see, e.g. , [54, Ch . 12]): ρ ( s ) ac hiev es its glob al maxim um only on the b oundary of C + . 27 Since ρ ( s ) is strictly prop er in C + , i.e., ρ ( s ) → 0 as | s | → + ∞ while k eeping s ∈ C + , it foll o ws that sup s ∈ C + ρ ( s ) < su p s ∈ C + ρ ( s ) ≤ sup ω ∈ R ρ ( j ω ) . (61) 26 Observe that ρ ( s ) is w ell-defined in s = 0 , and ρ (0) = 1 . 27 According to the maximum modu lus theorem [54, Theorem 10.24], the only p ossibilit y for ρ ( s ) to reach its gl obal maximum also on the interio r of C + is t h at ρ ( s ) be constant ov er all C + , whic h is not the case. 28 Using (61), w e infer that condition (60) is satisfied if ρ ( j ω ) = ρ ( j ω I + ∆ ) − 1 H ( j ω ) < 1 , ∀ ω ∈ R \{ 0 } . (62) F or any matrix norm k·k , since ρ ( A ) ≤ k A k ∀ A ∈ C N × M [43, Theorem 5.6.9], using the maximum r ow sum matrix norm k·k ∞ defined as [4 3, Definition 5.6.5] k A k ∞ , max r =1 ,...,N M X q =1 [ A ] r q , (63) w e hav e ρ ( j ω ) ≤ ( j ω I + ∆ ) − 1 H ( j ω ) ∞ = max r =1 ,...,N X q 6 = r k r a r q j ω + k r deg in ( v r ) e − j ω τ r q = max r =1 ,...,N k r deg in ( v r ) j ω + k r deg in ( v r ) ≤ 1 , (64) where in the last inequalit y the equalit y is reac hed if and o nly if ω = 0 . It follo ws from (64) that ρ ( j ω ) < 1 for all ω 6 = 0 , which guarantees that condition (60) is satisfied. This prov es that assumption b2) of Lemma 5 h olds true. He nce, all the tra jectories Ψ [ φ ]( t ) → Ψ ∞ as t → + ∞ , with exp onentia l rate arbitrarily cl ose to r , { min i Re { s i } : p ( s i ) = 0 a nd s i 6 = 0 } , where p ( s ) is defin ed in (37) and Ψ ∞ satisfies the linear s ystem of equations LΨ ∞ = 0 , whose solution is Ψ ∞ ∈ span { 1 N } (Corollary 2). I n other w ords, system (51) exp onentia lly reac hes the consensus on the state. C.2 Necessit y W e pro v e the n ecessit y of the condition by sh o wing that, if the d igraph G of (7) is not QSC, d ifferen t clusters of no des synchronize on different v alues. This lo cal sync hronization is in contrast with the definition of (gl obal) sync hronization, as giv en in Definition 1. He nce, if the o v erall system has to sync hronize, th e digraph asso ciated to the sys tem must b e QSC. Assume that the d igraph G asso ciated to (7) is not QSC , b ut W C with K SCCs and, let us say , r ≤ K (distinct) RSC C s . Then, acco rd ing to Lemma 2, the condensation digraph G ⋆ = { V ⋆ , E ⋆ } con tains a spann in g directed forest with r distin ct ro ots (asso ciated to the r RSCCs of the K S C Cs of G ) . Or dering the n o des v ⋆ 1 , . . . , v ⋆ K ∈ V ⋆ according to Lemma 1, and exploring the relationship b et w een G ⋆ and G (cf. A pp endix C.1.1), one can write the Laplacia n m atrix L = L ( G ) as an r -reducible matrix [43], i.e., L ( G ) = L 1 0 · · · · · · · · · 0 0 . . . . . . · · · · · · . . . 0 0 L r . . . · · · . . . ∗ ∗ ∗ B r +1 . . . . . . ∗ ∗ ∗ ∗ . . . 0 ∗ ∗ ∗ ∗ ∗ B K , (65) where th e fi rst r diagonal blo cks are the Laplacian matrices of the r RSCCs of G , and the { B k } , with k > r, are the nonsin gu lar matrice s asso ciated to the remaining SCCs . Eac h of these ma trices can b e 29 written as the linear com bination of the Laplacian matrix of the corresp onding SC C and a nonnegativ e diagonal matrix with at least one p ositiv e diagonal en try . The structure of L given in (65) sh o ws th at the RSCC s asso ciated to the first r diagonal blo c ks are totally decoupled from eac h other. Hence, (at least) the state deriv ativ es of the no d es in eac h of th ese r RSCCs reac h a common v alue (since the corresp ondin g su b digraph s are SC b y construction) that, in general, is d ifferen t for an y of the S CCs. This is sufficien t for th e o v erall system not to reac h a global sync hronization. References [1] E. Eisen b erg, D. Gale, “Cons ensus of Sub jective Pr o babilities: The Pari-mutuel Metho d,” The A nnals of Mathematic al Statistics , pp. 16 5–16 8 , Ma r. 195 9. [2] M. H. DeGro ot, “Reaching a Co nsensus,” Journ al of the Americ an S t atistic al Asso ciation , pp. 118– 121, Mar. 19 74. [3] J. N. Tsitsiklis, D. P . Ber tsek a s, M. Athans, “Distributed Asynchronous Deterministic and Stochastic Gradient Optimization Algor ithms,” IEEE T r ans. on A utomatic Contr ol , pp. 80 3 –812 , Sep. 1 986. [4] J. N. Tsitsiklis, “Pro blems in Decentralized Decisions Making a nd Computation,” Ph.D. D issertation , MIT, Cambridge, MA, Nov. 1982 . Av ailable at http ://web .mit. edu/jnt/www/Papers/PhD-84-jnt.pdf . [5] D. P Bertsek as and J.N. Tsits ik lis, Par al lel and Distribute d Computation: N umeric al Metho ds , A thena Scient ific, 1989 . [6] V. Bo rk ar, P . V a raiya, “ Asymptotic Agree ment in Distributed Estimation,” IEEE T r ans. on Automatic Contr ol , pp. 65 0–655 , 1 982. [7] R. Olfa ti-Sab er and R. M. Murray , “Conse nsus Pr oto cols for Netw orks of Dynamic Ag ent s,” in Pro c. of the 2003 Americ an Contr ol C onfer enc e , June 2003. [8] R. Olfati-Sa be r , and R.M. Murray , “Co ns ensus P roblems in Netw orks of Agents with Switching T op olog y and Time-Delays,” IEEE T r ans. on Automatic Contr ol, vol. 49, pp. 1520 - 1533 , Sep., 2004 . [9] W. Ren, R. W. Beard, and T. W. McLain, “Co o rdination V a riables and Consensus B uilding in Mult iple V ehicle Systems,”in P r o c. of the Blo ck Island Workshop on Co op er ative Contr ol, Springer-V erlag Series , vol. 309, p. 171 -188, 2005 . [10] C. W. W u, “ Agreement a nd Consensus Pro blems in Gro ups of Autonomous Age nt s with Linea r Dynamics ,” in Pr o c. of IEEE International Symp osium on Cir cu its and Systems ( ISCAS 2005) , pp. 292 - 295, 23-26 May 2005. [11] L. Xiao, S. Boyd, and S. Lall, “ A scheme for Robust Distributed Sens o r F usion bas e d on Average Consen- sus,” in Pro c. of the F ourth International S ymp osium on Information Pr o c essing in Sensor Net works, IPSN 2005 , 1 5 April 200 5, pp. 63 – 70. [12] J. Cor t ´ e s, “Finite-time Co nvergen t Gradient Flows with Applications to Netw ork Consens us,” Automatic a , vol. 42, no. 11, pp. 19 9 3–20 00, Nov ember 2006 . [13] R. Olfati-Sab er , E. F ranco, E. F r azzoli, and J. S. Shamma, “ Belief Co nsensus and Distributed Hyp othesis T es ting in Sensor Netw orks,” L e ctur e Notes in Contr ol and Information Scienc es , vol 33 1, pp. 169 - 182, July 200 6. [14] D. Bauso, L. Giarre, and R. Pesen ti, “Nonlinear Pr oto cols fo r O ptimal Distributed Consensus in Net works of Dynamic Ag ent s,” Systems & C ontr ol L etters , vol 55, no. 11, pp. 918- 928, J uly 200 6. [15] J. Cor t ´ e s, “Distr ibuted Algorithms for Rea ching Consensus on Genera l F unctio ns,”submitted to Automatic a , Octob er 20 06. Av ailable at h ttp:/ /www.s oe.ucsc.edu/ ∼ jcortes/research/data/2006 Co-aut o.pdf . [16] R. O lfati-Sab er and J . Shamma, “Co nsensus Filters for Sensor Net works and Distributed Sensor F usion,”in Pro c. of the Joint 44th IEEE Confer enc e on De cision and Contr ol and Eur op e an Contr ol Confer enc e (CDC- ECC’05 ) , Seville, Spain, December 2005. 30 [17] R. O lfati-Sab er, “Distr ibuted Kalman Filter with E mbedded Consensus Filters,”in Pr o c. of the Joint 44th IEEE Confer enc e on De cision and Contr ol and Eur op e an Contr ol Confer enc e (CDC-ECC’05) , Sev ille, Spain, December 2005. [18] A. Jadbabaie , J. L in, A. S. Morse, “Co ordina tio n of Gr oups of Mobile Autono mous Ag e nts Using Neares t Neighbor Rules,” IEEE T r ans. on Automatic Contr ol , pp. 988–1 001, J une 2003 . [19] L. Moreau, “Stabilit y of Multiagen t Systems with Time-dep endent Comm unication Links,” IEEE T ra ns- actions on Automatic Contr ol , vol. 50, no. 2 , pp. 16 9-18 2, F ebrua ry 2005 . [20] Z. Lin, B. F ra ncis, and M. Ma ggiore , “Necess ary and Sufficient Graphical Conditions for F or mation Control of Unicycles,” in IEEE T ra ns. on Automatic Contr ol , pp. 121-1 27, 2 005. [21] Z. Jin a nd R. M. Murray , “ Consensus Controllabilit y for Co o rdinated Multiple V ehicle Control, in Pro c. of Sixth Int. Conf. on Co op er ative Contr ol and Optimization, F eb. 1–3 , 2006, Gainesville, Florida. [22] V. D. Blo ndel, J. M. Hendrickx, A. Olshevsky , and J. N. Tsitsiklis, “ Conv ergence in Multiagent Co o r dina- tion, Consensus, a nd Flo cking,” in Pro c. of the J oint 44th IEEE C onfer enc e on De cision and Contr ol and Eur op e an Contr ol Confer enc e (CDC-ECC’05) , Sev ille, Spain, December 20 05. [23] R. Olfati-Sab er , J. A. F ax, R. M. Murray , “ C o nsensus a nd Co op eratio n in Netw or ked Multi-ag ent Systems,” in Pr o c. of the IEEE , vol. 95, no. 1 , pp. 21 5-23 3 , Jan. 2 007. [24] W. Ren, R. W. Bea rd, and E. M. Atkins, “ Information Conse ns us in Multivehicle Co op er ative Co ntrol: Collective Group Behavior Thr ough Lo cal Interaction,” IEEE Contr ol Systems Magazine , vol. 27, no. 2, pp. 71 - 82, April 200 7. [25] S. B a rbaro ssa, “Self-or ganizing Sensor Netw orks with Informa tion Propag a tion ba sed on Mutual Co upling of Dynamic Sy stems,” in Pr o c. of IWW A N 2005 , Lo ndon, UK, 20 05. [26] S. Bar ba rossa , and G. Scutar i, “Decent ra lized Max imu m Likelihoo d Estimation for Sensor Net works Co m- po sed of Self-synchronizing Lo cally Coupled Os c illators,”to appear on IEEE T r ansactions on Signal Pr o- c essing , July 2007. Av a ila ble a t http:/ /arxi v.org/abs/cs.DC/0612042 . [27] I. Schizas, A. Rib eir o, and G. B. Gianna kis “ Distr ibuted Estimation with Ad Ho c Wir eless Sensor Net- works,” in Pro c. of Eu ro p e an Signal. Pr o c ess. Conf. (EUSIPCO 06) , Flo r ence, Italy , Septem b er 4 -8, 20 06. [28] M.G. E arl, a nd S.H. Stro gatz, “Synchronization in Oscilla to r Net works with Delay ed Coupling: A Stability Criterion,” Physic al R ev. E , V ol. 67, pp. 1-4, 200 3. [29] A. Papachristodo ulou and A. Jadbabaie, “Synchronization in Oscillator Netw orks: Switchin g T op ologies and Presence of Nonhomogeneo us delays,”in Pro c of the 43th IEEE Confer enc e on De cision and Contr ol and Eur op e an Contro l Co nfer enc e (ECC-CDC 2005) , Seville, Spa in, December 2 005. [30] D.J. L ee and M.W. Sp ong, “ Ag reement With Non-uniform Infor mation Delays,” in Pro c. of the Americ an Contr ol Confer enc e (A CC 2006) , Minneap olis , MN, J une 14-1 6, 2006. [31] L. W a ng a nd F. Xiao, “A New Approach to Cons ensus P roblem fo r Discr ete-Time Multiagent Systems with Time-Delays,” in Pro c. of t he Americ an Contr ol Confer enc e (ACC 2006) , Minneap olis, MN, June 14-16, 2006. [32] G. Scutari, S. Ba rbaro ssa, and L. Pescosolido, “O ptimal Decentralized E stimation Thro ugh Self- synchronizing Netw orks in the Pre s ence of Propagation Delays,”in Pr o c. of IEEE Worksho p on Signal Pr o c essing A dvanc es in Wir eless C ommunic ations, (S P A WC-2006) , Cannes , F r ance, July 2006. [33] A. Giridhar, and P .R. Kumar, “Computing and Communications F unctions,” IEEE T r ans. on Information The ory , pp. 3 88–4 04, March 200 5. [34] S. M. Ka y , F undamentals of St atistic al Signal Pr o c essing , Pr e n tice Hall Signa l Pr o c. Ser ies, Upp e r Saddle River, NJ, 1998 . [35] L. P escoso lido, S. Barbarossa and G. Scutari, “Decen tralize d Detectio n and Localizatio n Throug h Sensor Net works Designed As a Population of Self-Synchronizing Os c illators,” in Pro c. of the IE EE International Confer enc e on Ac oustics, S p e e ch and S ignal Pr o c essing, (ICASS P 2006), V ol. 4, pp. 98 1-984 , T o ulouse, May 15-19, 2006. [36] A.-L. Bar abasi a nd R. Albert, “Emerge nce of Scaling in Rando m Net works,” Scienc e , v ol. 28 6 , pp. 509-5 12, 1999. 31 [37] S. Barbarossa , G. Scuta ri, A. Swami, “Achieving Co ns ensus in Self-organizing Wir eless Sensor Netw orks: The impact of Netw ork T op ology on Energy Consumption,” in Pro c. of the IEEE International Confer enc e on A c oustics, Sp e e ch and Signa l Pr o c essing, (ICASSP 2 007) , Honolulu, Haw ai, April 15-2 0, 2 007. [38] S. Barba rossa and G. Scutari, “Bio-inspired Sensor Net work Desig n: Distributed Decision Through Self- synchronization,” IEEE Signal Pr o c essing Mag azine , vol. 24, no. 3 , May pp. 2635 , 2007. [39] M. Fiedler, “Algebraic C o nnectivity of Gra phs ”, Journal of Cze choslovak Math. , vol. 23, pp. 298– 305, 1 9 73. [40] R. A. Brualdi a nd H. J. Ryser, Combinatorial Matrix The ory , Cambridge Univ ersity Press, 19 91. [41] C. Go dsil, and G. Royle, Alge br aic Gr aph The ory , Spring er, New Y ork, 2 001. [42] C. B erge a nd A. Ghouila–Hour i, Pr o gr amming, Ga mes and T r ansp ortation Networks , John Wiley & Sons, New Y ork, 1 965. [43] R. Ho r n, and C. R. Jo hnson, Matrix Analysis , Cambridge Univ ersity Press, 198 5. [44] C. W. W u, “On Bounds of Extr e mal E ig env alues of Irr educible a nd m-re ducible Ma trices,” Line ar Algebr a and its Applic ations , vol. 40 2, pp. 29-45 , June 200 5. [45] C. W. W u, “On Rayleigh–Ritz Ra tios o f a Generalized Laplacia n Matrix of Directed Gr a phs,” Line ar Algebr a and its Applic ations , vol. 40 2, pp. 20722 7, F ebruary 2005 . [46] C. W. W u, “Synchronization in an Arr ay of Chaotic Sys tems C o upled via a Directed Graph,”in P ro c. o f the IEEE Int. Symp osium on Cir cuits a nd S ystem (ISCAS S 2005) , Kob e, J apan, May 23-26 , 2 005. [47] V. Chellab o ina, W. M. Haddad, Q. Hui, a nd J. Ramakrishna n, “On Sys tem State E quipartitioning and Semistability in Netw ork Dynamical Systems with Arbitrar y Time- Delays,”in Pro c of the 44th IEEE Con- fer en c e on De cision and Contr ol (CDC 2006) , San Dieg o , CA, USA, December 1 3-15, 2006 . [48] R. B e llman and K.L. Co oke, Differ ent ial-Differ enc e Equations , New Y o rk Academic Press, 196 3. [49] G. Stepan, R etar de d Dynamic al Systems : Stability and Char acteristic F unctions , Pitman Research Notes in Mathematics Series, Long man Scientific & T echnical, 1989. [50] K. Gu, V.L. Kharitonov, J. Chen, St ability of T yme-Delay Syst ems, Control Engineer ing Series, Birkha user, 2002. [51] J. K. Hale, S.M.V. Lunel, In t r o duct ion to F unct ional Differ ential Equations , Spr inger-V erlag , 19 91. [52] T. K ailath, Line ar Systems , P rentice Hall, 1979. [53] J. R. Haddo ck and J. T erjeki, “Liapunov-Razumikhin F unctions and an Inv ar iance Principle fo r F unctional Different ial Equatio ns ,” Jour. of Diffe r ential Eq uations, vol. 48, pp. 95 -122, 1983 . [54] W. Rudin, R e al and Complex Analysis , McGraw-Hill, In terna tio nal Studen t Ed., 19 70. [55] S. Boyd and S. A. Deso er, “Subharmonic F unctions and Performa nce Bounds o n Linear Time-Inv ar ia nt F eedba ck Sy s tems,”in IMA J our. of Mathematic al Contr ol & Information , V ol. 2, pp. 153- 170, 1985. [56] S.L. Campbell and C.D. Meyer, Gener alize d Inverses of Line ar T r ansformations , Dov er Publications, 1991. 32
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment