Combinatorically Prescribed Packings and Applications to Conformal and Quasiconformal Maps
The Andreev-Thurston Circle Packing Theorem is generalized to packings of convex bodies in planar simply connected domains. This turns out to be a useful tool for constructing conformal and quasiconformal mappings with interesting geometric propertie…
Authors: ** Oded Schramm (주 저자) – 당시 Princeton University 박사 과정 학생 (지도교수: William Thurston) **
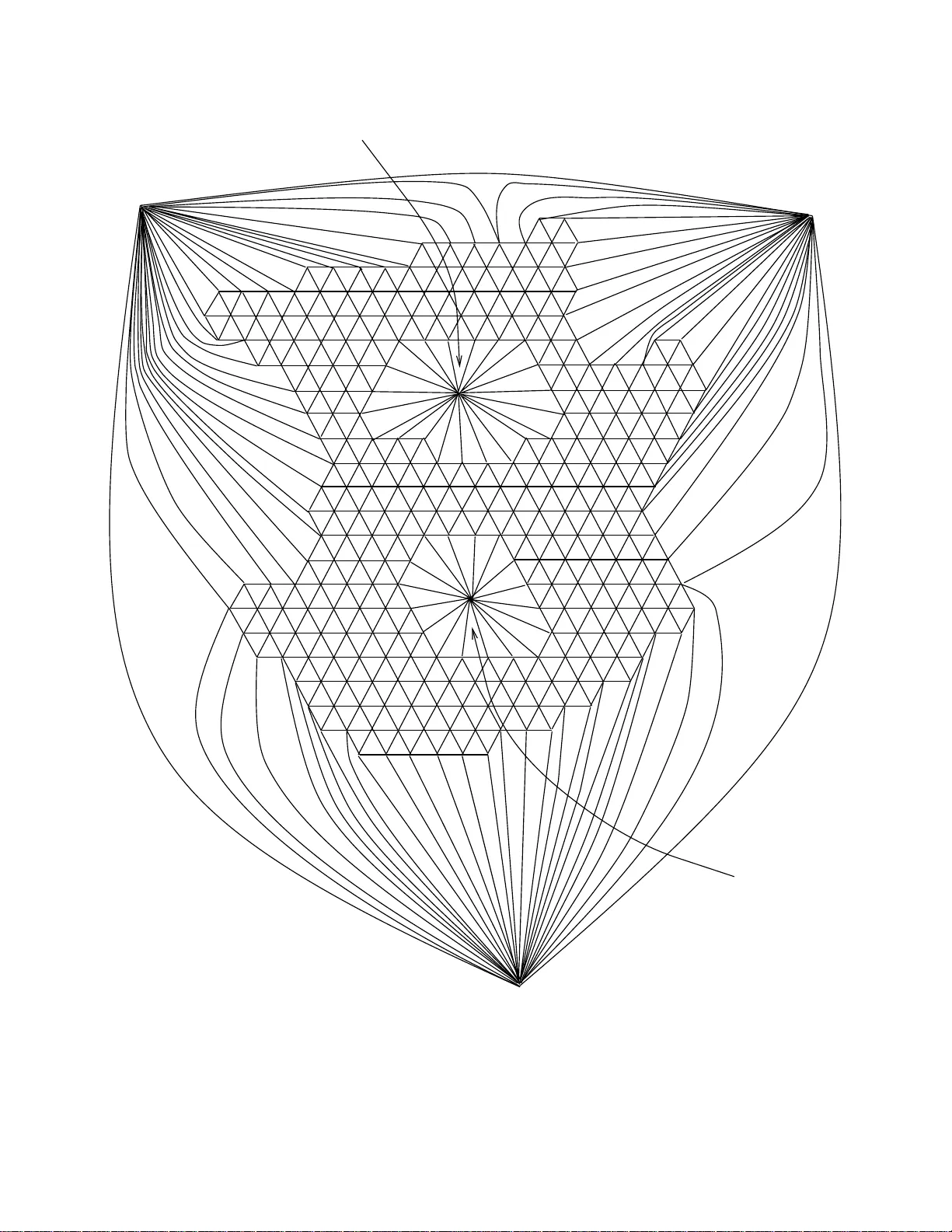
COMBINA TORICALL Y PRESCRIBED P A CKINGS AND APPLICA TIONS TO CONFORMAL AND QUASICONF ORMAL MAPS Oded Schramm Princeton Univ er s it y A b st ra ct . The Andreev-Th urston Cir cle P ac king Theorem is generalized to pac kings of conv ex b odi es in planar simply connected domains. This turns out to b e a useful tool for constructing conformal and quasiconformal map- pings with i nteresting geometric properties. W e attempt to illustrate this with a few results ab out unifor mizations of finitely connect ed planar domains. F or example, the following v ariation of a theorem by Couran t, Manel and Shiffman is prov ed and generalized. If G is an n + 1 -connected bounded planar domain, H is a simply connected bounded planar domain, and P 1 , P 2 , . . . , P n are (compac t) pl anar conv ex bo dies, then sets P ′ j can b e found so that G i s conformally equiv alen t to H − ∪ n j =1 P ′ j , and each P ′ j is either a p oint, or is p ositively homothetic to P j . 1. Introduction P ac king T heorem s. Say we are given a finite packing of cir cles in the plane or in the spher e . The nerve of the pac king is a plana r gr aph (without multiple edges or lo ops) which describ es the combinatorics of the packing. The vertices o f the nerv e corr esp ond to the cir cles in the pac king, and the edges corresp ond to pairs o f cir cles whic h touc h. A rein terpr e tation by Thurston 1 of a theorem of Andreev ([An1], [An2]) states that for any plana r gr aph there exists a packing of circles who s e nerve is the given gra ph. W e w ill refer to this fact as the Circle Pac king Theo rem. W e gener a lize the Circle Packing Theorem by proving the existence of pa ckings inv olving more g eneral figures. F o r example, we prov e the following. Supp ose that a planar graph is given, together with a corr e - sp ondence which as signs to e ach vertex of the g raph a (co mpact) smo oth plana r conv ex b o dy . Then it is po ssible to mo dify thes e c o nv ex b o dies by homotheties, so that they form a packing whose ner ve is the g iven graph. The Circle Pac king Theo rem is obtained when one takes a ll the conv ex b o dies to b e disks. The pr o of 1991 Mathematics Subje ct Classific ation . primary: 05B40, 30C20, 30C35, 30C60, 52A10, 52A45, 53C21; secondary: 05C05, 05C10, 35J60, 53C15.. Key wor ds and phr ases. packing, cir cle-pac king, conformal mapping, quasiconformal, multiply connected domains, uni- formization, Beltrami equation, elliptic equation.. 1 Giv en at the Internationa l Symp osium in Celebration of the Proof of the Bieb erbach Conjecture. Purdue Univ ersity , March 1985. See also [ Th] . Ty p eset by A M S -T E X 1 2 ODED SCHR AMM of this gener alization do es not rely on previously known pro ofs of the Circle Pac king Theorem, a nd is self contained, except for the use of Brower’s Fixed Poin t Theorem. It is p ossible to use the metho ds of this pap er to pro ve a generalization regarding packing o f balls of Riemannian metrics: Given a planar graph toge ther with a corr esp ondence which assigns to each vertex of the g r aph a Riemannian metr ic on the sphere, it is alw ays po ssible to find a packing on the sphere with the graph as its ner ve so tha t ea ch pack ed set is a ball in the Riemannian metr ic corresp o nding to the vertex asso ciated to the se t. See [Sch1], [Sch2]. Since the completion of this work, the author has develope d tw o additional appr o aches which yield similar generaliza tions o f the Cir cle Pac king Theorem [Sch2], [Sch3]. The adv an tag e s of these newer metho ds ar e that they give shorter pro ofs, and that one o btains sharp uniqueness statements. The main b enefit of the technique pr esented her e is that it ca n pro duce packing theor ems for which no r easonable unique ne s s statement holds, and is in that sense more general. Conformal Mappings. Th ursto n conjectured that the Circle Packing Theore m is related to the Riemann Mapping Theor em in that circle pac kings can be used to yield a ppr oximately confor mal mappings . This conjecture w as later prov ed by Ro din and Sulliv an in the charming pap er [R-S]. Ba s ically , the idea is that conformal mappings a re c har acterized by the pro per ty tha t their differentials take circles to circles. T o b e more sp ecific, consider a simply connected b ounded plana r domain G . Lo ok at a hexago nal pac king in the plane with small circles; that is, an infinite packing of small circles, all having the same size, s o tha t each one touches six others. F ro m this infinite packing select those circles that ar e contained in G , and call the resulting pa cking H . F rom the Circle Packing Theorem it follo ws that one ca n find a cir cle packing H ′ contained in the unit disk , together with a cor r esp ondence which assigns to every circle c in H a circle c ′ in H ′ , in suc h a way that touching circles in H corr esp ond to touching circles in H ′ , and that a b o undary circle in H (that is , a circle which do esn’t touch six o ther circles of H ) corre s po nds to a circle of H ′ which touches the unit circle (from the inside). The corresp ondence c → c ′ tends to the conformal map from G onto the unit disk, a s the size of the circles in the hexa g onal packing tends to zero, provided appropria te normalizatio ns are made. Pursuing this idea, w e use our ability to pack conv ex s hap es and the techniques of [R-S] to prove and generalize the follo wing theorem abo ut co nfo r mal mappings o f multiply c onnected domains. 9.1 Theorem. L et G b e an n + 1 -c onne cte d b oun de d domain in C which is obtaine d fr om a simply c onne cte d COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 3 r e gio n H after n disjoint c omp act c onne cte d sets F 1 , F 2 , . . . , F n have b e en r emove d f r om it. Assu me t hat none of the F j is a p oint. (T o avoid trivialities). Then for every planar b ounde d simply c onne cte d r e gion H ′ , and for every list P 1 , P 2 , . . . P n of n c omp act c onvex s et s which ar e not p oints, ther e ar e disjoint sets P ′ 1 , P ′ 2 , . . . , P ′ n c ontaine d in H ′ , with e ach P ′ j (p ositively ) homothetic to P j , such that G is c onformal ly e quivalent to H ′ − ∪ n j =1 P ′ j and the b oun dary of e ach F j c orr esp onds to the b oundary of the resp e ctive P ′ j under su ch a c onforma l e quivalenc e. In the c ase wher e the b oundaries of H and H ′ ar e simple close d curves, γ and γ ′ r esp e ctively, if thr e e distinct c oun t er clo ckwise or der e d p oints ar e chosen z 1 , z 2 , z 3 ∈ γ , and similarly z ′ 1 , z ′ 2 , z ′ 3 ∈ γ ′ , then such P ′ j -s and su ch an e quivalenc e c an b e chosen to satisfy the additional r e quir ement that e ach z j c orr esp onds to z ′ j when the c onformal e quivalenc e is extende d c ontinuously t o γ , γ ′ . The first part of this theorem follows from the work of Co urant, Manel and Shiffman [C-M-S]. Their re sults are o btained by v a riational techniques, and the pro of given here is very different. (See the intro duction in [Si] for references a nd a short survey of related results). In Theorem 9.1, instead o f prescribing the sets P ′ j up to homothety , one can use mo re g eneral prescriptio ns. F or example, if one is g iven a C 1 foliation of a neighborho o d of H ′ by cur ves, then the theorem still holds if P ′ 1 is req uir ed to b e some subarc o f one o f the leaves in the foliation. Meanwhile, the o ther P ′ j can b e prescrib ed as in the theore m, o r by the sa me foliation, o r b y other suc h foliations. Though this general s tatement follows from the techniques o f this pap er (packings of Riema nnian balls), we pr ove it her e only for the ca se wher e the leav es of the foliation ar e straight line segments. The pro o f for foliations b y curves will appear in a subsequent pap e r. Quasiconformal M aps. Circle packings hav e also been studied in connection to quasiconformal maps . Z. X. He [He2] used the Circle Pac king Theorem to construct solutio ns to the Beltra mi equa tion. How ever, for the study of quasiconformal maps it is more natural to use pa ckings of ellipses than packings of circles. The reason for this is that while conformal ma ps are characterized by the fact that their differential takes circles to circles, quasico nformal maps are (almo st) characterize d by the fact that their differential takes an ellipse o f b ounded eccentricit y to an ellipse o f b ounded eccentricit y . In the s ame manner that circle packings can b e used to c onstruct confor ma l maps, pa ckings of ellipses sho uld yield quasiconfor mal maps f that their differential at a po int z takes a sp ecified ellipse to a nother ellips e spe cified up to ho mothety . (The shap es o f the ellipse in the domain and of the ellipse in the range a re assumed to depe nd contin uously on z and f ( z ) .) This idea, for which I am indebted to Peter Doyle, c a n b e made to work in many situatio ns . O ne exa mple for 4 ODED SCHR AMM this is a generaliza tio n o f the ab ov e Theorem 9.1 to quasiconforma l ma ps satisfying a gener alized Beltrami equation, whic h we state and prov e in Section 9. Organization of the pap er. In Section 2 w e give some simple definitions and introduce notations. Section 3 is a sketc h of the technique use d here to prove the packing theorems. In Sections 4, 5 some prepar a tory work is do ne, and more definitions a re given. At the end of Section 5, a general packing theorem is stated, the Mons ter P acking Theorem. The subsequen t pa cking theor ems ar e directly derived from the Monster Pac king Theor em. Sections 6 and 7 ar e dev oted to the pro of of this theorem. Section 8 cont ains the results concerning pa ckings of co nv ex pla na r sets, while in Section 9 these res ults ar e applied to y ield confor mal a nd quasiconfor mal mappings of m ultiply connected domains. Ac kno wledgem en ts. I am deeply g rateful to my a dvisor Bill Thurston, to Peter Doyle, a nd to Richard Sch w ar tz, for teaching me muc h a b o ut circle-packings, for many discussions, a nd for giving muc h v aluable advice concerning this work. This pa p er is an edited v ersio n of my Ph. D. thesis [Sch1]. 2. Basic Definitions and Not a tions F or us, ‘the pla ne ’ will be the complex plane, C , and ‘the s pher e’ will b e the Riemann sphere, ˆ C = C ∪ {∞} . Let Q 1 , Q 2 be tw o closed sets in the sphere. W e will say that Q 1 and Q 2 touch , if they intersect, but the interior of Q 1 is disjoint fro m Q 2 , and the in terio r of Q 2 is disjoint from Q 1 . If they intersect, but do not touch, we s ha ll say that they int erse ct nontrivia l ly . A p acking is a finite indexe d collection of closed, connected, nonempty sets, suc h that there are no nontrivial intersections. A packing Q = ( Q i : i ∈ I ) in the sphere. is de gener ate d , if there is a p oint in common to three of the s ets Q i , or if one of the Q i -s contains only a single p oint. Gene r ally , when we mention a pa cking, it is assumed to b e nondegenera ted; other wise we will say sp ecifica lly that it may b e degenera ted. The n erve of the pac king Q = ( Q i : i ∈ I ) is the (abstract) gra ph whose vertex set is I and which has a (single) edg e h i, j i joining tw o distinct vertices i, j if a nd only if the sets Q i , Q j touch. If ea ch of the pack ed sets Q i is top o logically a disk, then the nerve is a planar graph; that is, it can be embedded in the pla ne. T o see this, cho ose an a rbitrary in terio r p oint, v i , in eac h of the s ets Q i , and cho ose a simple curve γ i,j in Q i ∪ Q j to join v i and v j whenever Q i and Q j touch. It is clearly p ossible to do this in such a w ay that the v a rious edges γ i,j are disjoint , except at the v ertices, and this defines a planar em b edding of the nerve. (Here the fact that the packing is nondegenerated is used). COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 5 Let T b e a tria ngulation of the spher e (without lo ops or multiple edges), a nd let G b e its 1 -skeleton as an abstract gra ph. Then G is a planar graph, a nd it is not hard to s ee that T ca n be reco ns tructed fro m G (up to homeomorphism). This is prov ed by noting that a tr iangle in G is the bounda r y of a triangle o f T if and only if it do es not sepa r ate G . F o r this r eason, we will be a little slopp y , and will no t distinguis h b etw een a triangulation and its 1-skeleton. F or example, w e ma y say that the ne r ve of a pac king is a tria ngulation. When trying to prove the existence o f a pa cking with a sp ecified nerve, and satisfying some co nditions on the shapes of the sets, it is gener ally sufficient to consider nerves which a re triangula tions, because if one is g iven a planar graph which is not a tria ngulation, then a dditional vertices may b e added, and edg es may b e adjoined to these new v ertices, connec ting them to each o ther and to preex isting vertices, to yield a triangulation. Th us, we will be dealing here mo stly with triangulatio ns . When we use the term triangulation it is implicitly assumed that we mea n a triang ulation of the spher e without lo ops and without multiple edges. F urthermore, the triangulations are as s umed to b e oriented, and so terms like ‘clo ckwise’ can be used. If Q ( x ) is a co mpact set in the sphere, dependent on a pa rameter x , then when we r efer to the limit of Q ( x ) as x → y , we will mea n the limit in the sense o f the Housdorff metric; likewise, contin uity of Q ( x ) is to b e unders to o d with resp ect to this metric. A c onvex b o dy is a b o unded compact c o nv ex set (in the plane) whic h has interior p oints. A homothety is a transformatio n o f the form z → az + b , where a, b are constants, a > 0 is rea l, and b ∈ C . Two sets are homothetic , if there is a homothety taking one set onto the other . 3. An Outline of the P acking Technique In this s ection we tr y to sketc h the technique used to prove the e x istence of packings on which our results are based. W e do this b y r estricting ours e lves to a s implified situatio n, and g iving a more or less co mplete pro of for that case. The co re of the pro of consists of an n -dimensiona l argument, and there are also many , mostly simple, tw o dimensional arguments. Hop efully this se c tio n will give the reader an idea o f the co re of the pro of, witho ut en tangling him or her in the m yriad of details. Instead of examining a g e ne r al triangulation, we shall no w consider only tria ngulations which have a spiral: 3.1 Defini tion. Let T be an (or iented) triangula tion of the spher e, a nd supp ose that v 1 , v 2 , . . . , v s is a Hamiltonian pa th in T . (That means that v 1 , v 2 , . . . , v s are distinct, tha t they are all the vertices of T , and 6 ODED SCHR AMM that v j neighbors with v j − 1 , for j = 2 , 3 , . . . , s ). F urther s upp os e that the edge h v j , v k i lies o n the left side of the pa th v j − 1 → v j → v j +1 , whene ver k > j + 1 , j > 1 , and v k neighbors with v j ; and tha t h v j , v k i lies on the r ight side of v j − 1 → v j → v j +1 , whenever k < j − 1 , j < s, and v k neighbors with v j . The n v 1 , v 2 , . . . , v s is called a c ounter clo ckwise spir al in T . See Fig. 3.1. 10 9 8 7 6 5 4 3 2 1 Figure 3. 1. A triangulation with a coun terclo c kwise spiral. Say we ar e given a tr iangulation o f the sphere T , to gether with a counterclo ckwise spir al v 1 , v 2 , v 3 , . . . , v s in T . L e t γ b e a smo oth simple clos ed curve in the plane C , a nd let Q 1 ⊂ ˆ C = C ∪ {∞} b e the closure in ˆ C o f the regio n determined by γ which contains ∞ . Supp ose that Q 2 , Q 3 are t wo circles which touch each o ther , a nd each one of them to uch es Q 1 . Our ob jective in this s ection is to establish the follo wing prop osition. 3.2 Prop ositio n . L et Q 1 , Q 2 , Q 3 , and T b e as ab ove. Ther e ar e cir cles Q 4 , Q 5 , . . . , Q s which, t o gether with Q 1 , Q 2 , Q 3 , form a p acking whose nerve is isomorphic to T . The ex hibite d isomorphism wil l take the vertex of the nerve which c orr esp onds to Q j to the vertex v j of T , for 1 6 j 6 s . Set C j def = Q j , j = 1 , 2 , 3 . W e examine the configura tions of circles C 4 , C 5 , . . . , C s satisfying, for j = 4 , 5 , . . . , s , the following conditions. (Here w e allow some of these circles to degenerate to p oints). (3.1) C j touches the circle C j − 1 . (3.2) C j also to uches ∪ j − 2 t =1 C t . (This a lso means that the interiors are disjoint). W e par ametrize this se t of configuratio ns in the fo llowing wa y . T ake the ( s − 3) -dimensional cube K = { ( x 4 , x 5 , . . . , x s ) : 0 6 x j 6 1 , j = 4 , 5 , . . . , s } . COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 7 Each p oint x ∈ K will determine such a configuration of circles C 4 ( x ) , C 5 ( x ) , . . . , C s ( x ) . Set C j ( x ) def = C j , j = 1 , 2 , 3 , x ∈ K . The definition of C j ( x ) will b e inductiv e; that is, C j ( x ) dep ends on C k ( x ) , k < j . Let 4 6 j 6 s , and supp ose that the circles C k ( x ) , 4 6 k < j hav e b een placed a lready . The co or dinate x j will help us place C j ( x ) . Lo ok a t C j − 1 ( x ) . The r e is a unique p oint, say p j − 1 = p j − 1 ( x ) , in whic h C j − 1 ( x ) touches C j − 2 ( x ) . Let p j = p j ( x ) b e the p o int who se angular distance from p j − 1 is 2 π x j , meas ured counterclockwise alo ng the boundar y o f C j − 1 ( x ) . The circle C j ( x ) is c hosen as the larg est circle whic h touches C j − 1 ( x ) a t p j and its interior is disjoint from ∪ j − 2 k =1 C k . (If no such circle exists, set C j ( x ) = { p j ( x ) } . In the s p ecia l case where C j − 1 ( x ) = { p j − 1 ( x ) } , we take p j ( x ) = p j − 1 ( x ) , C j ( x ) = C j − 1 ( x ) .) It is not to o difficult to see that this pro cedure defines the circle s C j ( x ) , tha t this definition satisfys (3 .1), (3.2), and that the circles C j ( x ) depend co ntin uously on x . W e wish to demonstra te the e x istence of a p oint x ∈ K such that the configura tion corresp onding to it is a packing with the required nerve. T ake s ome j, 4 6 j 6 s . If x j = 0 , or x j = 1 , then all the circ les C k ( x ) , k > j degenerate a nd are the point of contact of C j − 1 ( x ) with C j − 2 ( x ) . If x j is close to zero, then all the c ir cles C k ( x ) , k > j, are tr a ppe d in the funnel b etw een C j − 1 ( x ) a nd C j − 2 ( x ) . (See Fig. 3.2). If x j is close to o ne, they are tr app ed in the o ther funnel b etw een C j − 1 ( x ) and C j − 2 ( x ) . The first funnel is lo cated near the ‘right’ s ide o f C j − 2 ( x ) , and the s econd is lo cated near the ‘left’ side. Here, a nd in the following, the left side o f the circle C i ( x ) , (2 6 i < s ) , is that pa rt of the b oundar y of C i ( x ) which extends counterclockwise from the point p i +1 ( x ) , where C i +1 ( x ) to uches C i ( x ) , to p i ( x ) , the p oint where C i ( x ) touches C i − 1 ( x ) , including p i ( x ) and p i +1 ( x ) . When trying to find a n x which g ives our elusive pa cking, we se e tha t if x j is close to zero, it is to o small, be cause all the circles C t ( x ) , t > j, are in one of the funnels, and if it is close to o ne, it is to o larg e, bec ause all the cir cles C t ( x ) , t > j, a r e in the other funnel. One hop es that betw een zero a nd one there is some v alue which is right for x j . Of course, this must b e done simultaneously for j = 4 , 5 , . . . , s . This hints that some kind of ( s − 3) -dimensio nal In termediate V alue Theorem must b e used, and this is exac tly wha t we will do. Denote the 0- fa ces and 1-fa c es of K by F 0 j = { x ∈ K : x j = 0 } , F 1 j = { x ∈ K : x j = 1 } , j = 4 , 5 , . . . , s. F or each j = 4 , 5 , . . . , s , let h j be the least h > j suc h that v j − 2 has an edge in T with v h . (T o se e that v j − 2 neighbors with some vertex v t , t > j , lo ok at the edge h v j − 2 , v j − 1 i of T . Since T is a triangulation, there 8 ODED SCHR AMM j+3 j+2 j+1 j j-1 j-3 j-2 j+4 Figure 3.2. Some circles in the funnel. is some vertex, s ay v t , which c o mpletes this edge to a triangula r 2 -cell of T lying to the le ft of h v j − 2 , v j − 1 i . Now, t > j − 1 , since v 1 , v 2 , . . . , v s is a s pir al. So w e s e e that v j − 2 neighbors with some v ertex v t , t > j , and this shows that the definition ab ov e is OK ). Define K j = { x ∈ K : ∪ h j k = j C k ( x ) touches the left s ide o f C j − 2 ( x ) } − F 0 j , L = K − ∪ s j =4 K j . The pro of of Prop o s ition 3.2 consists o f showing that L ∩ ( ∩ s j =4 K j ) 6 = ∅ , and that for a p o in t y in this int ers ection, the sets C 1 ( y ) , . . . , C s ( y ) form a packing a s r equired. T o see that the intersection L ∩ ( ∩ s j =4 K j ) is no t empty , the following facts will be used. (3.3) K = ∪ s j =4 K j ∪ L . (3.4) K j ⊃ F 1 j , for j = 4 , 5 , . . . , s . (3.5) The rela tive interior of ∪ j − 1 i =4 K i contains ∩ s i =4 K i ∩ F 0 j , for j = 4 , 5 , . . . , s . (‘The rela tive interior’ means the interior r elative to K ). COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 9 Statement (3.3 ) is obvious. Statement (3.4 ) holds, b ecause if x j = 1 , then C j ( x ) contains p j − 1 , the int ers ection p oint of C j − 1 ( x ) a nd C j − 2 ( x ) . (Actually , in this case C j ( x ) = { p j − 1 } ). Statement (3.5) will be proved s hortly . Let us consider a p o int y in ∩ s i =4 K i , and let j b e in the r ange 4 6 j 6 s . As y ∈ K j , there is a sequence of p oints x ∈ K j conv erging to y . Since the definition o f K j implies that for these x , ∪ h j k = j C k ( x ) touches the left side o f C j − 2 ( x ) , we know that (3.6) ∪ h j k = j C k ( y ) touches the left side of C j − 2 ( y ) , by contin uit y . What happens if a ny o f the circles C i ( y ) degenera te to a p o in t? This certainly cannot happen when i < 4 . Assume tha t this does happ en fo r i > 4 , and that i is the minimal index such that C i ( y ) is a point. W e sha ll s e e now that y is in the relative interior o f K i . Since C i ( y ) is a p oint, supp ose that C i ( y ) = { p } . Then, b y the c o nstruction, C k ( y ) = { p } for k > i . T a king j = i , the union in (3.6) co nt ains only the po int p , and ther efore p is on the left side of C i − 2 ( y ) . Since C i − 1 ( y ) and C i − 2 ( y ) are touc hing circles, we conclude that p is their po int of tangency . This means y i = 0 or y i = 1 . Examine the case y i = 1 firs t. The sets C 1 ( y ) , . . . , C i − 3 ( y ) are smo oth; they ar e not po int s. None of these sets con tains the po in t p , be c ause C i − 1 ( y ) and C i − 2 ( y ) do, a nd it is impo ssible for three smo oth sets to touch at a p oint. So there is a positive dis ta nce from p to ∪ i − 3 t =1 C t ( y ) . This implies tha t, for x close enough to y , the circle C i ( x ) to uch es the left side of C i − 2 ( x ) , b ecaus e we know that it to uches ∪ i − 2 t =1 C t ( x ) , and x i is close to 1 . But this mea ns that y is in the re lative interior o f K i . F or the case y i = 0 , we use a similar argument. F or x / ∈ F 0 i close to y a ll the circles C k ( x ) , k > i are in the funnel b etw een C i − 1 ( x ) a nd the rig ht side of C i − 2 ( x ) . They therefore cannot r each the left side of C i − 2 ( x ) , a nd these x are no t in K i . This co ntradicts y ∈ K i , and shows that y i 6 = 0 . Now we are in a p os itio n to prov e statement (3.5 ). Suppose that x is a p oint in ∩ s i =4 K i ∩ F 0 j . As x j = 0 , it is easy to see that C j ( x ) consists of a sing le po int . Therefore, we may substitute x for y in the ab ov e analysis, to conclude that x is in the relative interior o f K i , for s ome i < j . This v erifys (3.5). In Sectio n 6 w e will use Brow er’s Fixed Poin t Theor e m to see that the facts (3 .3), (3 .4), (3 .5) imply that the in tersectio n L ∩ ( ∩ s j =4 K j ) is no t empty . Other topo logical arguments can be used instead. Having convinced ours elves that L ∩ ( ∩ s j =4 K j ) 6 = ∅ , we pick some p oint y in this in tersectio n. It remains to verify that the sets C 1 ( y ) , . . . , C s ( y ) form a pa cking a s required. 10 ODED SCHR AMM Since we are now assuming that y ∈ L , in addition to y ∈ ∩ s i =4 K i , the discussion ab ove shows that none of the sets C j ( y ) degenerates to a single p oint, b eca use o therwise we would hav e y ∈ rela tive interior K i , for some i , contradicting y ∈ L . The following lemma g a thers c ombinatorial prop erties of the spiral v 1 , v 2 , . . . , v s that w e will need be low. 3.3 Lemma. L et j b e an index in t he r ange 3 < j 6 s , and let k j b e the smal lest index k such that v j neighb ors with v k in T . (Se e Fig. 3.3). Then (1) k j < j − 2 , (2) v j − 1 neighb ors with v k j , (3) if k j < m 6 j − 2 , then v m has no neighb or in the r ange v t , m + 1 < t < j . j-2 k+1 k-1 k j-1 j Figure 3.3. A se ction of a s pi ral. Pr o of. Since T is a triang ulation, there is some vertex, say v k , which for ms a tria ngle together with the edge h v j − 1 , v j i , and this triangle, h v k , v j − 1 , v j i , lies to the rig ht of the edge h v j − 1 , v j i . k 6 = j − 2 , b e cause otherwise the edge h v j − 2 , v j i would emer ge fr om the right side of the pa th v j − 3 → v j − 2 → v j − 1 . The edge h v k , v j − 1 i appr oaches the pa th v j − 2 → v j − 1 → v j from the r ight, and therefore k < j − 1 . Using k 6 = j − 2 , we get k < j − 2 . This gives (1), since k j 6 k . T o prov e (2), we will show that k = k j . If k = 1 , this is obvious. Assume k > 1 . The edge h v k , v j − 1 i is to the r ig ht o f the path v j − 2 → v j − 1 → v j , and to the left o f the path v k − 1 → v k → v k +1 . Therefore the COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 11 closed path v k → v k +1 → · · · → v j − 2 → v j − 1 → v k separates v j from v k − 1 , and ther efore from all the vertices v t , t 6 k − 1 . So v j do es not neighbor with these vertices, and k = k j . Th us (2) is es ta blished. The pr o of of (3 ) is similar, and will not be given here . W e hav e used the fact that y ∈ K j to prov e (3.6). What can we deduce from y ∈ L ? Note tha t y / ∈ ∪ s i =4 F 0 i , b ecause we hav e sho wn that the circles C i ( y ) do not deg enerate. Since y ∈ L , there is a sequence o f x in L − ∪ s i =4 F 0 i conv erging to y . T ake such an x . Because x / ∈ ∪ j i =4 K i , the circle C j ( x ) cannot touch the left side of a cir cle C i − 2 ( x ) , when 4 6 i 6 j 6 h i . Let k j be the smallest index k such that v j neighbors with v k in T . If k j < i − 2 6 j − 2 , then 4 6 i 6 j holds, and j 6 h i follows from (3) o f Lemma 3.3. So, restating our prev io us co nc lus ion, the circle C j ( x ) do es not touch the left side of a ny o f the circles C t ( x ) , k j < t 6 j − 2 . But, by the construction, C j ( x ) touches ∪ j − 2 t =1 C t ( x ) . W e therefore see that C j ( x ) either touches ∪ k j t =1 C t ( x ) , or touc hes the r ig ht side of one of the circles C t ( x ) , k j < t 6 j − 2 . Using contin uit y , we see that the same holds for y instead of x ; that is, for j = 4 , 5 , . . . , s , (3.7) C j ( y ) touches ( ∪ k j t =1 C t ( y )) ∪ ( ∪ j − 2 t = k j +1 the right side o f C t ( y )) . (3.6) and (3.7 ) will be the only to ols that we will us e to s how that the to uchings dicta ted by the triangu- lation T a ctually occ ur in our pac king C 1 ( y ) , C 2 ( y ) , . . . , C s ( y ) . This is do ne in the following lemma. 3.4 Lemma. If v i neighb ors with v q in T and i < q , then C q ( y ) touches the left side of C i ( y ) . Pr o of. The lemma clearly holds when q = i + 1 . The pr o of fo r q > i + 1 will b e by induction on q . The case q 6 3 b eing obvious, we take some q, 3 < q 6 s , and assume that the lemma holds for smaller v alues of q . Case 1 , i = k q (notation of Lemma 3 .3 ): W e kno w tha t v q − 1 neighbors with v i , fro m (2) of Lemma 3.3. The induction hypotheses then implies that C q − 1 ( y ) touc hes the left side o f C i ( y ) . Let p b e a po int in this intersection. Consider the closed curve which travels counterclo ckwise along the bo unda ry of C i ( y ) from p to the first p oint of intersection with C i +1 ( y ) , then trav els counterclockwise along the bounda ry of C i +1 ( y ) , till it reaches C i +2 ( y ) , and so on, until, while walking alo ng the b oundary of C q − 1 ( y ) , it encounters p again. This cur ve determines a r egion R ⊂ C − ∪ q − 1 t =1 C t ( y ) , who se b oundary co nsists o f part of the left 12 ODED SCHR AMM i+2 R p i+1 q-2 i-1 q-1 i Figure 3. 4. The region R . side of C i ( y ) , the left s ide s of each of the cir cles C t ( y ) , i < t < q − 1 , and par t of the b oundar y of C q − 1 ( y ) . See Fig. 3 .4. T aking j = q in (3.6), shows that o ne o f the circles C t ( y ) , t > q , touches the left side of C q − 2 ( y ) , and therefore (b ecause i = k q < q − 2 ) is in R . But if one of these is in R , then all of them are, b eca use they are connected. In par ticular, C q ( y ) ⊂ R . This shows that C q ( y ) canno t touc h the s ets C t ( y ) , t < k q , and cannot touch the r ight side of the sets C t ( y ) , k q 6 t < q − 1 . By (3 .7 ) with j = q , C q ( y ) m ust therefore touch the left side o f C k q ( y ) = C i ( y ) , as required. Case 2 , k q < i < q − 1 : In this case q = h i +2 , by (3) o f Lemma 3.3. Lo oking at (3.6) with j = i + 2 , we see that it is sufficient to sho w that none of the circ les C t ( y ) , i + 2 6 t < q , touches the left side of C i ( y ) . Assume that this is not the case: assume that i + 2 6 m < q , and that C m ( y ) touches the left side of C i ( y ) . A con tra dic tio n will b e achiev ed using an argument very similar to the o ne a pp e a ring in case 1. Consider the regio n R ′ of C − ∪ m t =1 C t ( y ) whose b oundary consists o f part of the left s ide of C i ( y ) , the left sides of each of the c ircles C t ( y ) , i < t < m , and part o f the bounda ry of C m ( y ) . T aking j = m + 1 in COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 13 (3.6) sho ws that o ne o f the c ir cles C t ( y ) , t > m + 1 , is in R ′ . But if o ne o f these is in R ′ , then all of them are, in par ticular C q ( y ) . This contradicts what we have established in case 2, that C q ( y ) touc hes C k q ( y ) . This contradiction completes the discussion o f ca se 2 and the pro of of the lemma. Clearly , Prop osition 3 .2 follows from Lemma 3.4 , a nd so its pro of is complete. Reviewing what we have done in this section will reveal that we hav e used o nly the very gene r al pro per ties of c ir cles. In fact, there is no difficult y to generalize the discussio n to wider c la sses o f se ts . The harder part is to get rid of the ass umption that the tria ng ulation co nsidered has a spir a l, but the difficulty is mostly techn ical. 4. The Tree Let T be a n arbitr ary , but fixed, triangula tion o f the sphere, and let h a, b i b e an edge in T . W e shall denote the vertices of T b y V . It is the purp ose o f this section to construct a sp ecial spanning tree in T , called a right oriente d depth first se ar ch tre e , and to derive those prop erties which w e will need later. This spanning tree will take the ro le o f the spira l fro m the previo us section. T o constr uct the tree we imagine the vertices as b elonging to a dyna sty , and the tree will describ e their descendence hierar ch y . The founder of the dyna sty is a . He pr o duces the child b and dies. There ar e several rules that go vern the lives of the vertices a nd the evolution of the dy na sty . Every vertex lives o nly o nce. Except a , every vertex has one par ent; a has none. Just b efore he dies, a vertex may have children which are neig hbors of it in T . The vertices live a sad and lonely life. The loneliness rule s ays that in every given moment, and in ev ery connected compo nent o f T − { dea d vertices } , ther e is exactly one live vertex. Let’s follow the life of a typical vertex, v . As he is b orn and lo oks around him, what do es he see? He sees a c ir cle of vertices consisting of his neighbors in T , some o f them dead, and some not yet b orn. All the un bo rn neigh b ors must even tually become descendents o f v , b eca use v is the only liv e v ertex in its connected co mp onent of nondead vertices. O n the other hand, if u is a dea d neighbor of v , then, by the same reasoning as a b ove with v r eplaced b y u , we see that u is a n a ncestor of v . So the circle o f neighbors of v is par titione d into arcs containing ancestors of it a nd arcs containing descendents. The (maximal) ar c s consisting of descendents will be ca lled “the arcs” . It is obvious that tw o descendents included in the sa me arc a re in the sa me connected comp onent of the unbo r n vertices in T . The conv erse is also true: if u, w ar e t wo neigh b ors of v that are in the sa me connected comp onent of the 14 ODED SCHR AMM un b orn vertices, then they a re actua lly in the s ame arc. T o see this, lo o k at a simple (not self-intersecting), path of un b orn v ertice s joining u and w . When v is joined to this path o ne obtains a simple closed path. This close d path sepa rates T in to tw o compo nent s, because the top olo g ical space underlying T is a sphere. The comp onent that do esn’t contain the ro ot a must contain only unbo rn vertices. The neighbo r s of v that are in this comp onent c onnect u and w , th us showing tha t u a nd w are in the same arc. In order to pres e rve the loneliness r ule when v dies, it is necessar y and sufficient that v will have exactly one child in every connected comp onent of the unborn vertices that is contained in his connected c o mpo nent of T − { dea d vertices } . By the discussion a b ove, this means tha t v has one c hild in each a rc of unbor n vertices surrounding him. The last rule g ov erning the e volution of the dynasty is tha t every vertex v 6 = a, has the most clo ckwise vertex in every such arc a s a child. This is meaningful, since a is the o nly vertex having the un b orn vertices completely surr ounding him (Every other vertex has a parent). It is immediate that this pr o cedure defines a spanning tr ee, R, of T , with ro ot a, the edg es of R b eing {h f , s i : f is the parent o f s } . R defines a pa rtial order, 6 , on the vertices, in the following ma nner. W e say that u 6 v, if v is a descendent of u or v = u . E quiv alen tly , u 6 v if and only if u is on the shortest tree-path fro m v to the ro ot a . Since the pa rtial order 6 is induced, in this ma nner , by a tree, it has the prop erty that for eac h i ∈ V the set { j ∈ V : j 6 i } is linearly (that is, totally) ordered. W e have nea r ly completed the pro of of the follo wing propo sition. 4.1 Prop os i tion. Ther e is a sp anning t r e e R , in T , with r o ot a , so that R and the or der, 6 , induc e d by it satisfy: (1) b is the only child of a . (2) F or e ach e dge in the triangulation, its vertic es, e, f , ar e c omp ar able. Either e 6 f , or f 6 e . (3) If v 6 = a is a vertex in T and A is a maximal ar c c onsisting of desc endents of v neighb oring with v , then al l the vertic es in A ar e also desc endents of the most clo ckwise vertex in A , which is a child of v . (4) L et u, w b e desc endents of v neighb oring with v , then their me et (their latest c ommon anc estor), is v , or neighb ors with v . When v ∈ T − { a } we will denote by v − 1 the pa rent of v in the tree. Similarly v − 2 denotes th e grandpar ent of v , in cas e v 6 = a, b . Do not b e mislea d by the notation — v − 1 = u − 1 do es not imply u = v . The tree constructed ab ov e will be ca lled a right oriente d dfs t r e e for T r o ote d at h a, b i . Dfs s tands COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 15 for depth-first-search. Pr o of. Only (4 ) remains to b e justified. Le t s be the meet of u, w and assume s 6 = v . Let u ′ be the child of s which is 6 u , and similarly for w ′ and w . W e hav e u ′ 6 = w ′ . Let A ′ be the arc of neighbo rs of s , extending b et ween u ′ and w ′ , which do es not contain s − 1 . F r om (3), we know that there is so me a ncestor t of s in A ′ . Lo ok a t the cycle C comp osed of the (shortes t) tree- path fr o m s to u , the edges h v , u i , h v , w i and the tree-path fro m w to s . This cyc le separates T into tw o co mpo nent s, beca use the top ologic a l space underlying T is a sphere. ( C may se parate the gra ph of T into mor e than tw o co mpo nent s, but we take int o acco unt the t wo-cells as w ell). Lo oking in the neighborho od of s , we notice that this cycle separates t from s − 1 , if they a re not in C . Now lo ok at the circle of neighbo rs of v . As u, w desc e nd from the same c hild of v , one of the arcs extending be tw een them m ust consist exclusively of descendent s of v , b y (3). Denote this arc b y A . Again from (3), we s ee that in A v ha s no children. F ro m this we conclude that the co mp onent of T − C which corres p o nds to A contains only vertices which a r e > s , b eca us e all the vertices in C , except v , a r e > s . Therefore s − 1 cannot b e in this compo nent , and neither can t . Since they cannot b e together in the other comp onent, at least one of them is in C . Both are < s , so the only poss ibilit y is that one of them is v . In any case v neighbor s with s . Statement (3) of the Prop os itio n has the following useful cons equence. If u, v ar e neighbor ing vertices in T and u − 1 > v > a , then the edge h v , u i grows out o f the left side of the (directed) tree pa th fro m a to u − 1 . (Compare to Definition 3.1.) Suc h a n edge w ill be called a ‘left e dge’. So we s e e that all the edges in T are either tree -edges o r left edg es. There is a unique vertex in T , which we will denote b y c , so that h a, b, c i is a clo ckwise triangular 2-cell of T . F rom (3) o f the prop osition it follows that b = c − 1 , and that all the vertices of T , other than a, b, c are descendents of c ; that is, v > c for every v ∈ V − { a, b , c } . The fo llowing lemma provides more detail ab out the structure of ( T , 6 ) . 4.2 Cycle Lemma. L et i > c b e a vert ex in our triangulation T . L et I = { j ∈ V : j > i } and let H b e t he c ol le ction of vertic es in T b ounding I . (The vertic es in H ar e those vert ic es of T − I that have n eighb ors in I ). Then H forms a cycle in T . (Fig. 4.1). F u rthermor e, we have, (1) The vertic es in H ar e line arly or der e d (by our usual or der induc e d fr om the tr e e). Denoting the 16 ODED SCHR AMM vertic es of H by v 0 < v 1 < v 2 < · · · < v e , we have v e = i − 1 . (2) The e dges h v 0 , v e i and h v j − 1 , v j i , j = 1 , 2 , . . . e o c cur in T . If 0 < j < e and v j +1 < v < i , then the e dge h v j , v i do es not o c cur in T . (3) h i − 1 , i , v 0 i forms a cl o ckwise triangle in T . F or 0 6 j 6 e − 1 , ther e is a vertex i ′ ∈ I , so tha t h v j , i ′ , v j +1 i forms a clo ckwise triangle in T . (4) The vertic es of I lie on the left side of the cycle v 0 → v 1 → . . . v e → v 0 . 5 4 v v v 2 v 0 v 1 v i 3 v -2 3 v -1 3 v -1 5 v =i-1 6 Figure 4.1. The cycle H . An arr ow, u → w has b e en plac e d b etwe en two vertic es u, w , whenever u = w − 1 . Pr o of. Let u b e any vertex in H . It has a neighbor in I , say j . W e can walk along the boundar y of H and I in the follo wing manner. W a lking forward: u / ∈ I and therefore u − 1 / ∈ I , so u has some neighbor which is not in I . Lo oking at the circle of neighbors a round u , we mov e clo c kwise, starting a t j , un til a vertex not in I is reached. Denote this vertex by u ′ , and the vertex in I just b efore it deno te by j ′ . This is one s tep. Now the nex t step can b e taken if we put u ′ in place of u and j ′ in place of j . Note that h u, j ′ , u ′ i forms a clo c kwise COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 17 triangle in T . Let us check the case where u > u ′ . In tha t ca se (3 ) of Prop osition 4.1 implies that j ′ is a c hild of u , ( j ′ > u is tr ue in any ca se). Since j ′ ∈ I , u / ∈ I , we conclude that j ′ = i, u = i − 1 . What happ ens if we star t w alking from the pa ir i − 1 , i ? Call the v ertex of H that is reached in the first step v 0 , and the vertex o f I rea ched call i 0 . Let the vertices of H that are r eached in s ubs equent steps be v 1 , v 2 , . . . , and the v ertices o f I tha t ar e reached in subsequen t s teps b e i 1 , i 2 , . . . . Deno te b y e the first index > 0 so that v e > v e +1 ; i.e., v 0 < v 1 < · · · < v e , v e > v e +1 . F rom the discussio n ab ov e we ma y conclude that i e +1 = i, v e = i − 1 , v e +1 = v 0 . It is clear that the fir st pa rt of (2) is sa tisfied. Also (3) has b een established, with i ′ = i j +1 . T o v erify (4), no te that the cycle in (4) separates T into a comp onent lying to the left o f it and a comp onent lying to the right o f it. As I is connected, it m ust b e co nt ained in o ne o f these. F r om (3), we see that this mu st in fact be the comp onent to the left. T o see that there a re no other vertices in H , we will po int out that walking forward is inv ertible — one can walk backw ards. W alking backw ard is the same as forward, we only repla ce ‘clo ckwise’ with ‘counter- clo ckwise’. W alking forward a nd then backward fr om the pa ir u, j retur ns us to u . j may perhaps b e replaced b y h , another vertex in I , but this will ha ve no conseq uenc e s. ‘Ha ve no conse q uences’ here means that w alking forward or backw ard from u, j gives the same result as fr om u, h . Starting from an y adjacent pair u 0 ∈ H , i 0 ∈ I , we define u j , i j by walking forw ar d in the obvious manner. There will b e some index f so tha t u f > u f +1 . Then we have u f = i − 1 , i f +1 = i . Therefore a ll the v ertices in H ar e tho s e o btained b y walking backw ard from i − 1 , i . This gives H = { v 0 , v 1 , . . . v e } . It remains to prove the seco nd part o f assertion (2 ). Assume to the contrary that 0 < j < e , v j +1 < v < i and the edge h v j , v i o ccur s in T . Lo ok at the cycle C formed fro m the tree - path from v j to v b y adjoining the edge h v j , v i . Let this cycle b e oriented in the direction of the tre e - path from v j to v , and let the re g ion bo unded by the left side of this cycle b e denoted by R . There is some vertex in I , say k , which neighbo rs with v j +1 . Since the edge h v j +1 , k i is a left e dge, we see that k is necessarily in R . This shows that i is also in R , becaus e the tree pa th fro m i to k cannot cross C . Be c ause h v j , v i is a left edge, v j − 1 is not in R , and this shows that v 0 is not in R , contradicting the fact that i neighbors with v 0 . The contradiction establishes the second pa rt of a ssertion (2), and completes the pro of o f the lemma . 18 ODED SCHR AMM 5. Mons ters In Section 3 we hav e defined a mapping which assigns to each p oint in a Card( V ) − 3 cub e a configuratio n of circles in the plane. That mapping is a particula r case of what we call a monster . 5.1 Defini tion. Let T b e a triangulation o f a 2-sphere without multiple edges or lo ops, and let h a, b , c i b e a clo ckwise tr iangle in T . Let 6 b e the partial or der on V , the vertices o f T , induced by a right-oriented dfs tre e ro oted at the edge h a, b i . (As w e have seen, a < b < c a re the three smalle s t vertices.) Set J = V − { a, b, c } . A monster for ( T , 6 ) is a mapping M , which assigns to each p oint x in the Card( J ) - dimensional cub e K = [0 , 1] J a config uration of sets ( M i ( x ) : i ∈ V ) in the 2-sphere, ˆ C , s uch that the following conditions are satisfied. (M1) M i ( x ) is top ologically a closed disk or a p oint, for i ∈ J, x ∈ K . When i ∈ { a, b, c } and x ∈ K , M i ( x ) is top olog ically a closed disk. (M2) The mapping is contin uous. This means tha t for every i ∈ V the set M i ( x ) tends to M i ( y ) , as x tends to y in K . (M3) The in terior of M i ( x ) is disjoint from ev ery M j ( x ) , j < i (Note that when i , j a re not comparable, ov erlaps ar e permitted). (M4) M i ( x ) touches M i − 1 ( x ) , if i 6 = a . F urthermore, there are points p i = p i ( x ) in the in tersection M i ( x ) ∩ M i − 1 ( x ) , which depend cont inuously on x . The p oint p i ( x ) will b e called the b ase of M i ( x ) . (M5) M i ( x ) touc hes one o f the sets M j ( x ) , j < i − 1 , if i 6 = a, b . (M6) F o r each i ∈ J and x ∈ K , p i ( x ) = p i − 1 ( x ) if and only if e ither x i = 0 , x i = 1 or M i − 1 ( x ) is a po int . F urthermore, if x v aries in K and x i tends to zero, then the diameter of the counterclo ckwise arc fr om p i − 1 ( x ) to p i ( x ) along the bounda ry of M i − 1 ( x ) tends to zero, and if x i tends to 1 , then the dia meter of the clo ckwise arc fr om p i − 1 ( x ) to p i ( x ) along the b ounda ry o f M i − 1 ( x ) tends to zero. (M7) No- three-touch r ule: When i < j < k , x ∈ K a nd M i ( x ) ∩ M j ( x ) ∩ M k ( x ) 6 = ∅ , then one of these three sets is a p o int . Condition (M6) is w orthy o f some explanation. It is meant to describ e the motion of M i ( x ) around M i − 1 ( x ) . It says tha t M i ( x ) c ir cles counterclo ckwise aro und M i − 1 ( x ) , rela tive to p i − 1 , a s x i increases COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 19 from 0 to 1 . The reason for the sligh t technicalit y comes from the fact tha t the s et M i − 1 ( x ) may v ary during this proces s. Note that (M7), the no -three-touch r ule , is automatica lly satisfied if the sets M i ( x ) , when they don’t degenerate to points, hav e smoo th b oundar ies, or don’t hav e “sharp” cor ners. This is because of (M3). Sometimes we will write M i in place o f M i ( x ) ; likewise p i = p i ( x ) . One can just see the ter rible monster swinging its a rms in sheer r age, the tentacles causing a frightful hiss, as they rub ag a inst each other . Luc kily , the follo wing theorem comes to the rescue. 5.2 M onster P ac king Theorem. L et M b e a monst er for ( T , 6 ) and let K , V b e as ab ove . Then ther e is a p oint y ∈ K , such that the sets ( M i ( y ) : i ∈ V ) form a p acking with nerve T . A few lemmas will pr epare for the pro of of this theorem, which will b e co mpleted in Sectio n 7 . In Section 8 monsters consisting (mostly) of conv ex sets will be constr ucted, and existence results for packings of conv ex sets will follow from the Monster Pac king Theorem. 6. The Decomposition Let us fix a mons ter M and all the relev an t data : T , 6 , V , J = V − { a, b, c } , K etc. In this s ection we decomp ose the cube K = [0 , 1] J according to the touchings o ccurring b etw een the M i ( x ) , i ∈ V , x ∈ K . W e will see that the closures of the subsets forming this decomp osition in tersec t. In the next section it will be pro ved that a p oint in this intersection corr esp onds to a packing as require d for the Mo nster Pac king Theorem. Denote the 0- fa ces and 1-fa c es of K by F 0 i = { x ∈ K : x i = 0 } , F 1 i = { x ∈ K : x i = 1 } . Let j < i b e vertices in V − { a } . Suppos e, fo r instance, that the sets M i and M j touch, for a given x ∈ K . T o say only that they touch do es not describ e the situa tio n w ell. They ca n touch in tw o distinct wa ys (disregar ding deg enerate situations in which at least one of thes e sets ha ppe ns to b e a point). M i can touch either the r ight side or the left side of M j . Here, as usual, ‘right’ and ‘left’ are relative terms — they depe nd not only on j but also on i . T o make the distinction w e will need the following notatio n. 6.1 Notation. Let a 6 = j < i ∈ V , x ∈ K . Lo ok at the ‘snake’ of sets ∪ j 6 k i that is a neighbo r of g i in T , namely the mo st counterclockwise vertex in A . F r o m (4) of Pr o p o sition 4.1, we see that of all vertices v > i there is a unique minimal one h i which is a neig hbor of g i in T . (Possibly h i = i ). h i is called the heir of i . Now s et K i = { x ∈ K : ( ∪ i 6 j 6 h i M j ) ∩ LS i − 1 g i 6 = ∅ } − F 0 i , L = K − ∪ i ∈ J K i . Our decompo sition of K is K = ∪ i ∈ J K i ∪ L. M i-2 i-3 M i-4 M M i M i-1 M i-4 M i-3 i M i-1 M i-2 M Figure 6. 1. COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 21 6.2 In tersection Lemma. ∩ i ∈ J K i ∩ L 6 = ∅ . The pr o of of this lemma w ill b e given b elow, following so me prepa ration. A po int y ∈ ∩ i ∈ J K i ∩ L will henceforth be called an interse ction p oi nt . O ur metho d of proving the Monster Pac king Theor em will b e to show that any intersection point y gives a packing, ( M i ( y ) , i ∈ V ) , whose nerve is T . W e do not know muc h ab out the structure of o ur decomp osition o f K . Ho wev er, we will be able to o btain some information ab out the b oundar y b ehavior o f the decomp osition. The Intersection Lemma will follow from this infor mation and a top olo gical a rgument (Br ow er’s Fixe d Poin t Theorem). 6.3 Boundary Beha vior Lem m a. (1) K = ∪ j ∈ J K j ∪ L . (2) K j ⊃ F 1 j for j ∈ J . (3) F or every j ∈ J , F 0 j ∩ ( ∩ i ∈ J K i ) is c ontaine d in t he r elative interior of ∪ i i . 22 ODED SCHR AMM Since y ∈ K i , arbitrarily close to y ther e a re points y ′ ∈ K i . F o r these y ′ , (6.1) ( ∪ i 6 k 6 h i M k ) ∩ LS i − 1 g i 6 = ∅ . W e will exa mine three cases. Case 1 , y ∈ F 0 i : W e wish to see tha t this canno t happ en. In this ca se we hav e p = p i − 1 ( y ) , by (M6). Lo ok at a p oint y ′ ∈ K i very close to y . Provided y ′ is close enough to y , the M k ( y ′ ) , k > i, will still b e very small and v ery close to p i − 1 ( y ′ ) , by contin uity . Lo ok a t the unio n o f the b o dies cor resp onding to descendents o f i , including i : D ( x ) = ∪ k > i M k ( x ) . By (6.1), D ( y ′ ) in tersec ts LS i − 1 g i ( y ′ ) . Let us first see that D ( y ′ ) ∩ L S i − 1 i − 2 ( y ′ ) = ∅ . Since y ′ ∈ K i , y ′ i 6 = 0 , and since y ′ is close to y , y ′ i is small. Because of (M6), this means that the base of M i ( y ′ ) , p i ( y ′ ) , is a little counterclo ckwise from p i − 1 ( y ′ ) o n the b oundar y of M i − 1 ( y ′ ) . So M i ( y ′ ) and LS i − 1 i − 2 ( y ′ ) are on differen t sides of M i − 2 ( y ′ ) ∪ M i − 1 ( y ′ ) . (See Fig. 6.2). In other words, for D ( y ′ ) to touch LS i − 1 i − 2 ( y ′ ) it must either go aro und M i − 1 ( y ′ ) or go around M i − 2 ( y ′ ) , or sneak b etw een them. (The interiors of the M k , k > i are disjoint fro m ∪ k v and M u touches the left side of M v . Then there is a region in the complement of ∪ v 6 j 6 u M j whose b oundar y co nsists of part of ∂ M u together with L S u v excluding a pa r t of ∂ M v . See Fig. 7.1. W e will denote the closure of this re gion by R u v . (This regio n may b e no n-unique, if M u ∩ M v contains more tha n a single p oint. In that case, we choo se R u v to denote one o f those regio ns.) If j < v or j > u , and M j int ers ects R u v , then M j is contained in R u v This follows fro m the no-three- touch rule, bec ause M j cannot intersect no nt rivia lly with ∪ v 6 j 6 u M j . (Aga in see Fig. 7 .1). If v 6 = a , then R u v do es not co nt ain the base of M v , which is in M v − 1 . Therefore R u v is disjo in t from M v − 1 . Contin uing, we see that R u v is disjoint from all the sets M j , j < v . Similarly , if j > u and M j ⊂ R u v , then a ll the sets M k with k compara ble to j and k > u are contained in R u v . W e will use these facts in the following. u-2 v-1 v u-1 u M M M M M v R u Figure 7.1. The regi on R u v . Pr o of. As the name suggests , the lemma will b e prov ed by induction. It is obviously true for the case i = a, b, c . T ake some i ∈ J . W e will a ssume the lemma holds when i is re placed by any vertex < i , and COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 27 prov e that it holds for i . Let v 0 < v 2 < · · · < v e = i − 1 b e as in the Cycle Lemma 4.2. By the inductiv e hypo theses, M v e touches the le ft side of M v 0 . F r om the first part of the Contacts Lemma, we k now that ∪ i 6 j 6 h i M j touches LS i − 1 v e − 1 . This shows that one o f the s ets M j , j > i intersects R v e v 0 and therefore is contained in R v e v 0 . But if one of the sets M j , j > i is con tained in R v e v 0 , then all o f them a r e, for they are connected. In pa rticular, M i ⊂ R v e v 0 . Our next ob jective is to show that M i touches the left side of M v 0 . Since M i is in R v e v 0 , it canno t po ssibly touch any set M j , j < v 0 , a nd it ca nnot touch R S v e v 0 . The second par t of the Contacts L e mma says that M i touches ∪ j v 0 . Let s be the child o f v 1 which is < i . See Fig. 7.2. Since i is not in the reg ion of T which is b ounded by the left side of the tre e-path from v 0 to v 1 and the edge h v 0 , v 1 i , neither is s . Let v b e the ancestor of v 1 which is o ne vertex clo ckwise from s among the neighbor s of v 1 . v canno t be > v 0 , b eca use it is imp os sible for the edge h v , s i to go o ut of the rig ht side of the tree-path from v 0 to v 1 ; and v 6 = v 0 , b ecaus e v = v 0 would mean that there a re tw o distinct edges b etw een v 0 and v 1 . So we conclude that v < v 0 . By the induction hypotheses, M s touches M v . This shows that M s is not in R v 1 v 0 , and therefor e M i isn’t there either. So in any case M i do es not touch the left side of any of the sets M k , v 0 < k < v 1 . W e co nc lude that M i touches the left side of M v 0 . v 1 i v 0 i-1 s v Figure 7.2. A p ortion o f T . An y vertex v < i − 1 which neighbors with i must be one of the vertices v 0 , v 1 , . . . , v e − 1 . Assume that 28 ODED SCHR AMM v t neighbors with i ( 0 6 t 6 e − 1 ). W e must show that M i touches the left side o f M v t . W e hav e done this alrea dy for t = 0 , so a ssume that t > 0 . Let j be the child o f v t +1 which is 6 i . ( v t +1 = j − 1 , j 6 i ). In the pr o of of the Co ntacts Lemma we have o bserved that, in this setting, g j = v t and i 6 h j . But i > h j , bec ause i neig hbo rs with v t . So h j = i . F r om the Contacts Lemma we know that ∪ j 6 k 6 h j M k touches LS j − 1 g j = LS v t +1 v t . Therefore, to v erify that M i touches the left side o f M v t , it is sufficient to show that none of the s ets M k , j 6 k < i touc hes LS v t +1 v t , and that M i cannot touch the left side of an y of the sets M k , v t < k < v t +1 . W e will show no w that M i cannot touch the left side of a n y of the sets M k , v t < k < v t +1 . If v t +1 − 1 = v t there is nothing to show. O therwise, b y the inductive hypo thes es, M v t +1 touches the left side o f M v t . Since we have shown tha t M i touches M v 0 , it follo ws that M i is not in R v t +1 v t , a nd therefore M i do es not touc h the left side o f any of the sets M k , v t < k < v t +1 , as w as required. W e shall show now that none of the sets M k , j 6 k < i touches LS v t +1 v t . Since M i is not in R v t +1 v t , the same is true for all the sets M u , u > j , a nd therefore they to o c annot touc h the left side o f a ny o f the s ets M k , v t < k < v t +1 . It remains to show that none o f the sets M u , j 6 u < i touches the left side of M v t . Assume to the co nt ra ry that j 6 u < i and M u touches the left side o f M v t . Let r b e the child of u which is 6 i . It is easy to see that g r > v t . M i is not in R u v t , b eca use it touches M v 0 . This implies that none of the sets M k , k > r ar e there, in co nt ra diction to the Contact Lemma whic h says that ∪ r 6 k 6 h r M k touches LS r − 1 g r . This contradiction completes the pro of that M i touches the left s ide of M v t , and the pr o of of the lemma. Pr o of of the Monster Packing The or em. W e will first show that ( M i : i ∈ V ) is a pac king; that is, that the sets M j and M j ′ do not intersect non trivially when j 6 = j ′ . W e already know that this holds when j and j ′ are comparable. Let k be so me vertex in T , and suppo se that i and i ′ are tw o distinct children of k . Among the neighbor s of k , let v be the one which lies one step clo ckwise from i , and let v ′ relate to i ′ in the same manner . F ro m the prop erties of our tree, we know that v and v ′ are ancestors of k . Therefore they ar e compar a ble. It is obvious that v 6 = v ′ . Assume without loss of generality that v > v ′ . F r o m the Inductive Lemma we know that M k touches the left side of M v , a nd that M i ′ touches the left side of M v ′ . F ur thermore, in the pro o f of the lemma we have seen that M i is contained in the r e gion R k v (In the nota tio n of the lemma v is v 0 and k is v e = i − 1 ). Since v ′ < v , the set M v ′ is not in that r egion, a nd therefore neither is M i ′ , which COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 29 touches it. If j > i and j ′ > i ′ , then M j is in R k v , while M j ′ is not. W e deduce that M j cannot intersect M j ′ . If we now start with any t wo no nc o mparable vertices j, j ′ , we let k be their meet, let i b e the child o f k which is 6 j , and similarly for i ′ and j ′ . The argument of the previous pa ragra ph shows that M j and M j ′ do not intersect, as r equired. This s hows that we have a packing. It now follows tha t our pac king has the req uired nerve, for the argument ab ov e shows that it co ntains no edges which are not in T , and the Inductive Lemma 7 .2 shows that all the edges of T a re present in the nerve. The fact that the packing is nondegener ated follows from Cla im 6.4 and y ∈ L . This co mpletes the pro of of the Mo ns ter Packing Theorem. R emark 7.3. The Inductiv e Lemma actually implies that the packing pro duced, in a ddition to having T as its ner ve, also agr e e s with the orientation of T . F o r exa mple, the sets M j which touc h M b touch the left side of M b . 8. P a cking Conv ex Bodies In this section w e will apply the Monster Pac king Theorem to pr ov e the existence of packings of conv ex bo dies pres crib ed up to homothety . W e will sta r t with a situation in which a few simplifying assumptions hav e b een made, and then move on to rid our selves of the noness ent ial assumptions. 8.1 Prop osi tion. L et ther e b e given a triangulation of the spher e, T , a clo ckwise triangular 2-c el l h a, b, c i , in T , and fo r e ach vertex v in V , t he set of vertic es of T , let ther e b e a pr ototyp e P v , which is a set in the plane. Assume that P a is t he unb ounde d r e gion determine d by a smo oth simple close d curve, and e ach P v , v 6 = a, is a smo oth, st rictly c onvex c omp act set in the plane. Assume that every p air of the thr e e sets P a , P b , P c touch e ach other. Then ther e is a p acking in the plane Q = ( Q v : v ∈ V ) whose nerve is T su ch that Q a = P a , Q b = P b , Q c = P c and e ach Q v is (p ositively) homothetic to P v , for v ∈ V − { a, b, c } . (Se e Fig. 8.1). Here, and in the following, a curve is called smoo th, if it has finite length and is once differentiable with resp ect to an arc-length par ameter. A planar set is s mo o th, if it has nonempty interior and its b oundar y is smo oth. Pr o of. W e will use the Monster Packing Theorem. F o r tha t purpo s e we will need to crea te a monster whose comp onents hav e the desired sha p es. 30 ODED SCHR AMM c b a Figure 8.1. A pac king of con v ex shap es i n a Jordan do main. Let 6 b e the order induced on V by a righ t oriented dfs tree o f T r o oted at h a, b i . W e will use the notation and terminology in tro duced in the pr evious sections. A monster M will b e constructed in the following manner . F or every x ∈ K = [0 , 1 ] J , ( J = V − { a, b, c } ) , se t M a ( x ) = P a ∪ {∞} , M b ( x ) = P b , M c ( x ) = P c . The remaining sets M v ( x ) will b e defined inductively , using our pa rtial or der 6 . Cho ose p b and p c to be so me touching p oint o f M a , M b and M b , M c resp ectively and set p b ( x ) = p b , p c ( x ) = p c . Let v ∈ J, x ∈ K . Assume that M j ( x ) , ( j < v ) , and p j ( x ) , ( a < j < v ) , ha ve been defined already , in such a wa y that the interiors of M k ( x ) , M j ( x ) a re disjoint when k < j , that every p j ( x ) is a point where M j ( x ) to uches M j − 1 ( x ) , and that ea ch M j ( x ) , a < j < v , is either a p oint or is homothetic to P j . If M v − 1 ( x ) is a po int, M v − 1 ( x ) = { p v − 1 ( x ) } , and set p v ( x ) = p v − 1 ( x ) , M v ( x ) = { p v ( x ) } . Otherwis e let p v ( x ) b e the p oint o n the b oundar y of M v − 1 ( x ) s o that the length of the part of the bounda ry of M v − 1 ( x ) extending coun terclo ckwise from p v − 1 ( x ) to p v ( x ) is exac tly x v · length( ∂ M v − 1 ( x )) . In other w or ds, as x v increases fr o m 0 to 1 , while the other co ordinates remain fixed, the p oint p v ( x ) trav els counterclo ckwise along ∂ M v − 1 , with constan t spee d, star ting and ending at p v − 1 . This defines p v ( x ) . Now there is not m uch choice left in defining M v ( x ) . M v ( x ) will be defined to be a set S , whic h is either homothetic to P v or a p oint, touches M v − 1 ( x ) at p v ( x ) , and to uch es ∪ j β > 0 . Since C is strictly conv ex, C α will contain the bo undary of C β in its in terio r, e x cept for the p oint p v ( x ) . This shows that there is at mo s t one p ositive num b er α s uch that the homothety with cent er p v ( x ) a nd co efficient α takes C to a set which touches ∪ j c . The only pro blem arise s for the vertices d in T such that d − 1 = c , that is , children of c . Since h a, b , c i is a tr iangle in T , sta temen t (3) of Prop. 4.1 implies that there is at mo st one child of c in T ; deno te it by d . (It is po s sible that a, b, c are the only v ertices in T . W e ignore this trivia l case). So our task is to place M d ( x ) , x ∈ K . W e examine the simpler cas e in whic h P d is a geometric disk, a ball for the Euclidean metric o f the pla ne. The ex istence of a packing for the genera l case will fo llow fro m it. Consider the following situation. W e are g iven thr e e s mo oth sets P a , P b , P c ⊂ ˆ C so that any pair of them touch es. Assume that the ab ove sets ar e ho meomorphic to dis ks a nd one o f them c o ntains ∞ as an int erio r point. W e a re in terested in geometric disks, that is, close d balls of the E uclidean metric on C , which touc h P c and to uch P a ∪ P b . Such disks we will call p ermissible disks , a nd we do not exclude from this definition the p er missible dis k s of radius 0 , these ar e the sets co nt aining o nly a single p oint where P c int ers ects P a ∪ P b . A p o in t on ∂ P c which is co n tained in some per missible disk will b e called an ac c essible p oint . The se t of acce s sible points will b e denoted b y A . 8.2 Lemma. A is a close d subset of ∂ P c . F or e ach ac c essible p oint ther e is a unique p ermissible disk touching it. If Γ is an ar c of ∂ P c having b oth endp oints in A , but no othe r p oint of it is in A , then the p ermissible disks touching the two endp oints of Γ ar e the same. Pr o of. Let q ∈ A . If q is a p o in t where P c touches P a or P b , then the o nly p ermissible disk containing q is { q } , b ecause three smo oth sets ca nnot touch at a p oint. Assume that this is not the case. Since P c is smo oth, any permis s ible disk containing q must be tangent to ∂ P c at q . Compar ing tw o different disks which are ta ng ent from the outside to P c at q , we see that the larger one con tains the boundary o f the smaller one in its int er io r, exce pt for the po int q . Thus at most o ne o f them ca n b e a p e rmissible disk, a nd the second a ssertion of the lemma holds. F or the first a ssertion, let ( z i ) b e a sequence of p oints in A conv erging to some p oint z ∈ ∂ P c . The 34 ODED SCHR AMM corres p o nding sequence of permiss ible disk s containing the p oints z i will hav e s ome subsequence which will conv erge to so me disk D . It is immediate that D is a p ermissible disk co nt aining z . Th us z ∈ A , a s ne e de d. Now let D 1 , D 2 be t wo distinct p ermissible disks with centers o 1 , o 2 resp ectively . Let q 1 be a p oint where D 1 touches P a ∪ P b ∪ P c and simila r ly let q 2 be s uch a p oint for D 2 . The uniqueness a rgument ab ov e can b e applied to show that q 1 6 = q 2 , a nd we o bviously hav e o 1 6 = o 2 . The p oint o 1 is in the half-pla ne consisting of all the p oints tha t their distance to q 1 is no larg e r than their distance to q 2 , and the resp ective statement holds for o 2 . This shows that the line segments [ o 1 , q 1 ] and [ o 2 , q 2 ] do not intersect. Assume that the la st as sertion o f the lemma fails. Let the endp oints o f Γ b e q 1 and q 2 , let D 1 and D 2 be per missible disks touching at q 1 , q 2 , let their centers b e o 1 , o 2 , and let s 1 , s 2 be p oints wher e D 1 and D 2 touch P a ∪ P b , res p ectively . F rom the prev ious paragr aph we know that the tw o curves C 1 = [ q 1 , o 1 ] ∪ [ o 1 , s 1 ] and C 2 = [ q 2 , o 2 ] ∪ [ o 2 , s 2 ] do not intersect. T ake any simple curve C 3 contained in P a ∪ P b and joining the po int s s 1 and s 2 . (The sets P a and P b int ers ect). Lo ok at the r egion disjoint from P c that is b ounded by Γ , C 1 , C 3 , C 2 . (See Fig. 8.3). In this region there is some p oint o 3 whose distance to P c is the same as its dista nce to P a ∪ P b . o 3 m ust b e the center o f a p ermissible disk D 3 . Let q 3 be a p oint where D 3 touches P c . F rom the previous pa ragr a ph we know that the line segment [ o 3 , q 3 ] do es not intersect C 1 ∪ C 2 . An y in terior p oint o f it canno t intersect C 3 ∪ Γ . W e ma y conclude tha t q 3 ∈ Γ , in co n tra diction to our assumptions. This contradiction shows that D 1 = D 2 , a nd completes the pro o f of the lemma. W e will use the lemma to construct a monster for o ur new situation. Set M v ( x ) = P v for v = a, b , c, x ∈ K . ( M c will need to b e sligh tly modified la ter.) T ake some para metrization of ∂ P c , q : [0 , 1] → ∂ P c , which circles counterclo ckwise aro und P c and such tha t q (0) = q (1) = p b , a nd q is one-to-o ne o ther wise. With each t ∈ [0 , 1 ] we will asso cia te a p ermissible disk D ( t ) , in the following manner . If q ( t ) is a n access ible po int , let D ( t ) b e the unique per missible disk to uch ing q ( t ) . O therwise, since A is a clos ed set, there is a unique arc Γ , which satisfies the hypotheses o f the lemma and contains q ( t ) . In this case, we let D ( t ) b e the p ermissible disk which touches the endp oints of Γ . Finally , let M d ( x ) = D ( x d ) , for x ∈ K . The lemma shows that the definitio n mak es sense. Is M d ( x ) contin uous in x ? If q ( t ) is not an accessible p oint, then D ( t ′ ) = D ( t ) for every t ′ close enough to t , so D ( t ) is co ntin uous at such t . The uniqueness o f the per missible disk touching at a g iven a ccessible po int s hows that D ( t ) is a lso contin uous a t p oints t suc h that q ( t ) is access ible. Thus D ( t ) and hence als o M d ( x ) are contin uous. COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 35 P P P a b c D 1 D 2 C 3 Figure 8.3. Lo oking for another p ermissible di sk. F or this to b ecome part of our monster, we m ust define a p o in t p d ( x ) which v aries contin uously , a nd is alwa ys a po int where M d ( x ) to uches M c ( x ) . Shortly we will see that this is not alwa ys p o ssible with o ur current definitions of M c , M d , and therefor e we will slightly mo dify M c . When q ( x d ) is an acc e ssible p oint leav e M c ( x ) = P c , a s befo re, and set p d ( x ) = q ( x d ) . Let 0 6 t 1 < t 2 6 1 , and as sume tha t q ( t 1 ) , q ( t 2 ) are access ible , but no p o in t q ( t ) , t 1 < t < t 2 , is accessible. L et Γ b e the image of [ t 1 , t 2 ] under q ( · ) , then Γ is as in the lemma. As x d increases from t 1 to t 2 , the set M d ( x ) r emains the p e rmissible disk, s ay D , which touches M c at q ( t 1 ) and q ( t 2 ) , but p d ( x ) must so mehow trav el contin uously from q ( t 1 ) to q ( t 2 ) , while contin ually remaining in M c ∩ M d ( x ) . T o perfor m this difficult task w e redefine M c ( x ) . One of the ar c s o f the b oundary of D which extends betw een q ( t 1 ) and q ( t 2 ) bounds , together with Γ , a reg ion R , which is disjoint from P a ∪ P b ∪ P c ∪ D . Denote this ar c by C . T ake s ome smo oth ho motopy H fro m Γ to C which stays in the regio n R and keeps the endp oints q ( t 1 ) , q ( t 2 ) fixed. Now define M c ( x ) , 36 ODED SCHR AMM for t 1 6 x d 6 t 2 , a s fo llows. When x d increases in the first thir d of the interv al [ t 1 , t 2 ] the set M c ( x ) is P c together with part of R as v a ries according to the homotopy H , until, when x d reaches the po int (2 t 1 + t 3 ) / 3 , the set M c ( x ) be c omes P c together with the clo sure of R . (T o b e more ex plicit, if the ho motopy is such that H 0 = Γ and H 1 = C , then let M c ( x ) b e the regio n b ounded by ( ∂ P c − Γ) ∪ H s , when x d = t 1 + s ( t 2 − t 1 ) / 3 .) When x d increases fro m (2 t 1 + t 3 ) / 3 to ( t 1 + 2 t 3 ) / 3 , M c ( x ) r emains the same as for x d = (2 t 1 + t 2 ) / 3 . In the final third of [ t 1 , t 2 ] , M d ( x ) reverses its expansio n of the first third, and r eturns, w hen x d = t 2 , to b e ing P c . Now p d ( x ) can a ccomplish the jump from q ( t 1 ) to q ( t 2 ) . As x d v aries in the first thir d of [ t 1 , t 2 ] , let p d ( x ) r emain at q ( t 1 ) . In the second third let it trav els along C fro m q ( t 1 ) to q ( t 2 ) . In the la st third let it remain stationary at q ( t 2 ) . It is clear that with these definitions M c ( x ) , M d ( x ) a nd p d ( x ) a re contin uous. The definition of M v ( x ) , p v ( x ) , v > d can r emain as in the pro o f of the prop o sition. By our construction, the mapping M th us constructed satisfies the requir ement s (M1)–(M7 ), and is therefor e a monster. The Mo ns ter Packing Theorem may be applied to yield a pa cking Q = ( Q i : i ∈ V ) . Is Q the pac king w e need? Almost. There are only tw o problems. The first one is that it may happen that Q c 6 = P c . This is b ecause we mo dified the definition of M c . If this happ ens, and w e replace Q c by P c , w e will still hav e a packing, b ecause the difference betw een Q c and P c can only b e in the r egion R of the previous par a graph, and, in this region R , there aren’t any bo dies Q v , since the nerv e of Q is T . The new packing in which Q c is replaced b y P c will, of course, still hav e nerve T . The second pro blem is tha t w e hav e restricted our selves to the case that P d is a geometric disk . T o ov ercome this restriction w e insert a new vertex in the triangulation T . In T the child of c , d , is character ized by the fact that h c, d, a i is a clo ckwise triangular 2-cell. Insert in this 2-cell of T a new vertex d ′ , connect edges from it to a, c, d , and split the 2- cell accordingly . Let the re s ulting triangulation b e T ′ . By the restricted cas e , there is a pa cking with nerve T ′ for the data tha t we hav e together with the requirement that the set corr esp onding to d ′ is a disk. If this set is ignored o ne ha s the r e quired pac king for T . Let us summar ize what we have do ne. W e have shown that in P rop osition 8.1 one can rela x the require- men ts impo sed on P a , P b , a nd P c . It is sufficien t to require of them that they ar e smo oth top olog ical disk s in ˆ C , with each one touching the other t wo, and that one of them contains ∞ in its in terior . Suppo se that P a , P b , P c satisfy these conditions, then ther e are precisely tw o co nnected c o mpo nents o f ˆ C − ( P a ∪ P b ∪ P c ) which neighbor with all three of P a , P b , P c , and for just one o f these c onnected co mpo nent s, COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 37 say W , P a , P b and P c are counterclo ckwise s ituated, in that or der. So the packing g iven by Prop. 8.1 will necessarily take place in W , b ecause h a, b, c i is a clo ckwise tria ng le in T . (See Rema rk 7 .3). Therefore only the par ts of the bo undaries o f P a , P b , P c which are exp ose d to W a re relev ant to the Prop ositio n. So supp ose that C is a simple closed curve in C , which is smo oth, except for three distinct po ints, and that P a , P b , P c are the thr e e arcs determined by these p oints, situated counterclockwise with r esp ect to W , the b ounded region determined b y C , and further suppo se that the three angles o f W that P a , P b and P c determine at their intersections a re zero, then the existence of a packing like that in the Prop os itio n holds in this case also. Replacing Strict Con v exity With Conv exi t y. Using approximations, the requirement tha t the sets P v , v 6 = a, b, c, are strictly con vex is easy to r eplace b y the w eaker condition that they are convex. T o see this, suppose that the sets P v , v ∈ V − { a, b, c } , are smo oth compact conv ex sets, w itho ut the assumption that they a re strictly c onv ex. Since compa ct convex sets can b e approximated by smo oth strictly conv ex sets (The intersection o f all balls of r adius r co ntaining S is a go o d stric tly co nvex approximation for S , if r is larg e and S is compa ct and conv ex. The smo othness is no proble m.), for each v ∈ V − { a, b, c } we can find a sequences P 1 v , P 2 v , . . . of smo o th strictly co nv ex sets conv erging to P v . By the prop o s ition, for i = 1 , 2 , . . . , there is a packing Q i = ( Q i v : v ∈ V ) with the rig h t ner ve, with Q i a = P a , Q i b = P b , Q i c = P c and with e ach Q i v , v ∈ V − { a, b, c } , homothetic to P i v resp ectively . W e c a n choose a subseque nce of pa ckings such that all the sets will conv erge. In o ur car elessness, we shall denote this subse quence to o by ( Q i ) . So each s e q uence ( Q i v ) con verges to some set Q v . How can Q = ( Q v : v ∈ V ) fail to b e a packing as required? It cannot fail. First it is clear that the interiors of the sets ar e disjoint and that each of them touches a ll the sets that it is supp o sed to touch. O nce we convince our selves that the sets do not degenerate to p oints it will be clear that ea ch Q v , v ∈ V − { a, b , c } , is homothetic to P v , resp ectively , and that we hav e a packing as required. Certainly the sets Q a , Q b , Q c are not p oints, because they are equal to P a , P b , P c resp ectively . T o reach a contradiction, a ssume that Q v consists of o ne po int p . Let V ′ be the set of vertices u ∈ V such that Q u = { p } , and let U b e the set of vertices in V − V ′ neighboring with some vertex in V ′ . F or every u ∈ U , the set Q u contains the p oint p (and is therefore not a single p oint and thus is homothetic to P u ). Since at most t wo smo oth sets can touch a t p , w e see that there can b e at most tw o vertices in U . This is clearly impo ssible, b ecause U m ust contain at least one cycle (the edges with b o th endp oints in U separa te the 38 ODED SCHR AMM union of 2 -cells with at lea st one vertex in V ′ from the tr iangle h a, b, c i ), and there are no multiple edges in T . This co ntradiction establishes our claim that the strict conv exity in Prop osition 8.1 may be replaced b y conv exity . F o r this argument, showing that the limit packing do es not degener ate, I am indebted to Richard Sch w ar tz. Compare also [Th, Ch. 13]. Smo othnes s. The discussio n a bove exp os es very well the extent to which smo othness is an essential hy- po theses in the P rop osition. Ther e is no problem to approximate co nv ex s ets by smoo th conv ex sets, or to approximate a nonsmo o th region P a by smo o th regions . The pla ce whe r e the above r easoning br eaks down in the absence of smo othness is the pro of of nondegenera cy . In fact, it is eas y to see that this cannot b e ov ercome, at least not in the g enerality in which the prop osition is stated. Fig. 8.4 illustra tes an example which shows that some smo o thness requirement is needed. If one still do esn’t like the smo othness r estriction, one has tw o optio ns. One ca n try to find weak er conditions whic h still suffice, or can drop the restr iction altog ether, and see what can still b e prov ed in this new situation. W e will pursue both trails . F o r the first endeavor, note that in the a pproximation arg umen t ab ov e all that was used w as that for every cycle C in T the sets corres po nding to vertices in C cannot all touch at one p o int. This is satisfied, for instance, if, in the situatio n where P a , P b , P c are arcs o f a s imple closed curv e (this situation is discussed at the end of the subsection ab out fre eing P b and P c ), the sets P v , v ∈ V − { a, b, c } ar e smo o th, the arcs P a , P b , P c are smo oth, and ea ch of the thre e angles of W which they determine is < π . Without the presence of a smo othness condition, o r something like the no-three-touch rule, the a pprox- imation pr o cedure might yield a ‘degenerated pa cking’. It will still retain the structure of the packing but some deg eneration may o c c ur. Each set will still b e disjoint from the int erio rs o f the other sets, and will touch those sets which it is supp osed to touch by the decree of the triang ulation T . Howev er it may also touch some o f the sets without the co nsent of T , and some of the sets might degener ate to p oints (or line segments, if some of the P v are line segments). W e will term s uch a configuratio n a de gener ate d p acking c onforming to T . T o summarize: 8.3 Conv ex P ac king Theorem. L et ther e b e given a triangulation of the spher e, T , and a clo ckwise triangular 2-c el l h a, b, c i , in T . Le t C b e a simpl e close d curve in the p lane, and let P a , P b , P c b e t hr e e ar cs c omp osing C in c ounter clo ckwi se or der, which ar e determine d by thr e e distinct p oints of C . F or e ach COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 39 d P P b P a P e P c e d c b a T Figure 8.4. Imp o s sible to pac k nondegenerately . vertex v in V − { a, b, c } ( V is the set of vertic es of T ), let ther e b e a pr ototyp e P v , which is a c onvex set in t he plane c ontaining mor e than one p oint. Then ther e is a (p ossib ly de gener ate d) p acking i n the p lane Q = ( Q v : v ∈ V ) c onformi ng to T , such that Q a = P a , Q b = P b , Q c = P c and e ach Q v ( v ∈ V − { a, b , c } ) is either a p oint or (p ositively) homothetic to P v . In the fol lowing situation it c an b e guar ante e d that the p acking ab ove is nonde gener ate, and its n erve is T . The sets P v ( v ∈ V − { a , b, c } ) ar e also smo oth, the ar cs P a , P b , P c ar e smo oth, and the thr e e angles of the b ounde d r e gion determine d by C (at the p oints wher e these ar cs me et) ar e < π . Shap e Fie lds. W e will no w generalize Theo rem 8.3 still further. Ins tea d o f determining the sets to b e 40 ODED SCHR AMM pack ed up to homo thet y , they will b e spe cified in a more g eneral manner . This will be useful later for some applications. 8.4 Defini tion. Let D be a set in the plane. A (conv ex) shap e field on D is a contin uous function F which assigns to each p oint p ∈ D a compact convex set F ( p ) containing mor e than a single p oint. The image o f F is then the co llection of a ll s ets P ⊂ D whic h are homothetic to F ( p ) for some p oint p on the b ounda r y of P . F will be called smo oth , if a ll the sets F ( p ) are smo oth. (It is not required that F is a smo oth function in an y sense.) Similarly , when the sets F ( p ) are strictly c o nv ex, F is said to b e strictly c onvex . W e will see some exa mples of sha pe fields in the nex t section. The reas on for introducing these definitions is the following theorem. 8.5 Shap e Field Pac ki n g Theorem. L et t her e b e given a triangulation of the spher e, T , and a clo ckwi se triangular 2-c el l h a, b, c i , in T . L et C b e a simple close d curve in the plane, and let P a , P b , P c b e thr e e ar cs c omp osing C in c ounter clo ckwise or der, which ar e determine d by thr e e distinct p oints of C . L et D b e t he union of C and the b ounde d domain determine d by C . F or e ach vertex v in V − { a, b, c } ( V is t he set of vertic es of T ), let F v b e a sha p e field on D . Then ther e is a (p ossibly d e gener ate d) p acking in the plane Q = ( Q v : v ∈ V ) c onformi ng to T , such that Q a = P a , Q b = P b , Q c = P c and e ach Q v ( v ∈ V − { a, b , c } ) is in the image of F v . If the shap e fields F v ar e smo oth, the ar cs P a , P b , P c ar e smo oth, and the thr e e a ngles of the b ounde d r e gio n determine d by C ar e < π , then the p acking ab ove is nonde gener ate, and its nerve is T . Pr o of. First the shap e fields F v are extended contin uously to the who le plane. There is no problem in doing so, since D is clo sed. Consider now the statement a nalogo us to Pro p. 8.1 , with the requirement that the pack ed sets Q v , v ∈ V , be in the c orresp onding images of smo oth, strictly convex shap e fields F v replacing the requirement that they be homothetic to some pr ototype, P v . The pro o f of this mo dified statement is the same as the pro o f of Prop. 8.1, the only minor difference b eing in the inductive construction of the monster M . When M v − 1 and a p oint p v on the b oundary of M v − 1 hav e b een c hos e n, the set M v is then chosen as the only set homothetic to F ( p v ) whic h touches M v − 1 at p v and also touches ∪ j 0 , let H ǫ be a hexag onal circle packing o f the whole plane with the diameter s of the c ir cles b eing ǫ . Provided ǫ is small eno ugh, the flow er of one of these circles, say C 0 , will co ntain p , and b e contained in G . A cir cle of H ǫ will be called inner if it can be co nnected to C 0 by a chain of circles whos e flow ers a re co n tained in G . A circle of H ǫ will b e called a b oundary circle if it is not inner, but is adjace n t to some circle whic h is. Le t Q = Q ǫ be the packing consisting of the inner and b o undary circles in H ǫ , and let N = N ǫ be its nerve. See Fig. 9.1 and Fig. 9.2. W e tak e ǫ small enough so that the collectio n of b oundary circles will consist of n + 1 disjoint cycles of circles, R, S 1 , . . . , S n : the circles in R will b e those which a r e nea r γ , and those in each S j are near F j , resp ectively . z 1 z 2 z 3 S and S R 1 2 Figure 9. 2. The pac king Q ǫ appro ximates the region G . COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 43 R * S 1 * S 2 * Figure 9.2. The nerve N . Split R into three paths of c ircles, R 1 , R 2 , R 3 , with an ov erlap of one circle b etw een every t wo of these paths, so that the dis tance betw een any circle of R j to γ j is at most 2 ǫ , for j = 1 , 2 , 3 . It is clea r that this can be done. W e shall construct from N , the nerv e of the packing Q ǫ , a triangulation T = T ǫ . In (the complement of the embeding in the s phere of ) N there ar e 2-cells R ∗ , S ∗ 1 , . . . , S ∗ n whose vertices cor resp ond to the c ircles in R, S 1 , . . . , S n resp ectively . F or eac h j = 1 , 2 , . . . , n ta ke a new vertex, v j , insert it into the 2- c ell S ∗ j and s plit S ∗ j by inserting edges which join v j to ea ch vertex in the b oundary of S ∗ j . Int o R ∗ insert three vertices, a 1 , a 2 , a 3 , connect them with edges to for m a clo ckwise tr iangular 2 -cell, h a 1 , a 2 , a 3 i , connect a 1 to all the v er tices corresp onding to circles in R 1 , connect a 2 to all the vertices corr esp onding to cir cles in R 2 , connect a 3 to all the vertices cor resp onding to circle s in R 3 , and split R ∗ int o tr iangular 2-cells according ly . One easily verifies that this pro cedur e y ields a triang ulation of the sphere. See Fig. 9.3. 44 ODED SCHR AMM 2 v v 1 a 1 a 2 a 3 Figure 9.3. The triangul ation T . COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 45 By the Co nv ex Packing Theo rem, there exists some packing H ′ ǫ whose ner ve is T , and which satisfies the following. The sets in H ′ ǫ corres p o nding to a 1 , a 2 , a 3 are γ ′ 1 , γ ′ 2 , γ ′ 3 , r esp ectively , thos e cor r esp onding to v 1 , v 2 , . . . , v n are homothetic to P 1 , P 2 , . . . , P n , r esp ectively , and the r est, thos e corresp o nding to vertices which are in N , ar e cir cles. W e shall denote the set in H ′ ǫ corres p o nding to v j by P ′ j,ǫ ; it is ho mothetic to P j . Q ′ ǫ will deno te the collectio n of circles in H ′ ǫ corres p o nding to the v ertices whic h were origina lly in N . So there is a one-to-o ne corresp ondence betw een the circles of Q ǫ to tho se of Q ′ ǫ . Pick some sequence of ǫ - s decre a sing to zer o. The remainder of the pro of uses the metho ds of [R-S] to show that some subsequence o f the ‘appr oximate mappings’ which match each circle in the packing Q ǫ to the circle corresp onding to the same v ertex of T in Q ′ ǫ , co nv erges to a conformal mapping, as r equired. 9.2 Reso lution Lem m a. The diameters of the cir cles in Q ′ ǫ de cr e ase to 0 as ǫ → 0 . Pr o of of R esolution L emma. The pr o of is a n adapta tion of the pro of of the Length-Area lemma o f [R-S]. Let d b e a p ositive num ber which is sma lle r than the distance b etw een any t wo of the s e ts γ , F 1 , F 2 , . . . , F n . Let C b e some cir cle in Q ǫ , let C ′ be the corres po nding cir cle in Q ′ ǫ , and let k be the la rgest integer satisfying ( k + 2) ǫ < d/ 2 . Lo ok a t the k co ncentric rings of cir cles in H ǫ around C consisting of 6 , 12 , 18 , . . . , 6 k circles, denote these rings by Z 1 , Z 2 , . . . , Z k . ( Z j consists of the cir cles in H ǫ that hav e combinatorial distance j from C ). They meet at most one of the sets γ , F 1 , F 2 , . . . , F n . Consider firs t the case in which they don’t meet any of these sets . In this case they are in Q ǫ . Denote the corresp onding rings of circles in Q ′ ǫ around C ′ by Z ′ 1 , Z ′ 2 , . . . , Z ′ k . Let l j denote the length of Z ′ j , that is, twice the sum o f the radii o f circles in Z ′ j , a nd let l be the minim um of the l j ( j = 1 , 2 , . . . , k ) . In Z ′ j there are 6 j cir cles and the sum o f their radii is l j / 2 . F rom the Cauch y-Sch warz inequality , we deduce tha t the sum of the s quares of the radii is > ( l j / 2) 2 / 6 j . This means that the a rea cov ered b y all the Z ′ j -s together is > co nstant · l P k j =1 1 /j , beca use the Z ′ j are disjoint in area. But this area is cer tainly b ounded ab ov e by the a rea of H ′ , thus, as ǫ → 0 and k → ∞ , necessa rily also l → 0 . But if l is small then C ′ is also sma ll, b ecause each l j is an upp er bo und for the diameter of C ′ . This is so, because the closed curve consisting of line segments b etw een consecutive circles in Z ′ j has length l j and surrounds C ′ . W e deal now with the case where the co nc e ntric ring s Z 1 , Z 2 , . . . , Z k meet γ (and therefore do not meet any of the sets F 1 , F 2 , . . . , F n ). Since these rings are not all contained in Q ǫ , we need to mo dify the argument of the pr evious case. W e c a n assume that d has b een chosen sma ll enough s o that there is no po int in the plane who se dis tance to all three arcs γ 1 , γ 2 , γ 3 is 6 d . Assuming this, one of these a rcs, say γ 1 , has distance 46 ODED SCHR AMM > d from the cent er of C . Thus, each circle in one of the rings Z 1 , Z 2 , . . . , Z k has distance > 2 ǫ from γ 1 , and is not in R 1 . Denoting now by Z ′ j the co llection of circles in Q ′ ǫ which cor r esp ond to cir c le s of Q ǫ which ar e in Z j , we see that e a ch Z ′ j is either a ring of circles s eparating C ′ from γ ′ 1 , or con tains a path of circles which, together with por tions of γ ′ 2 , γ ′ 3 , s e pa rates C ′ from γ ′ 1 . Define l as t wice the minim um of the sum of ra dii o f circles in Z ′ j , a s pr eviously . So in H ′ ǫ there is either a closed curve of length l separating C ′ from γ ′ 1 , or a path of length 6 l , whic h tog ether with por tions of γ ′ 2 and γ ′ 3 do es so. If l is small, this implies that C ′ is small. (The following fact was use d here. If x, y ar e p oints on the simple curve γ 2 ∪ γ 3 , then the diameter o f the portion of the curv e betw een x a nd y tends uniformly to zero , a s the dista nce betw een x a nd y tends to zero). Applying the sa me pr o of as in the pr evious ca se, we know that l tends to zero when ǫ → 0 . (If Z ′ j contains less circles than Z j , it mak es our estima tes even b etter). So w e conclude that in this ca se also C ′ is small once ǫ is. The case where the rings Z 1 , Z 2 , . . . , Z k int ers ect one of the s e ts F 1 , F 2 , . . . , F n is dealt with similarly , but less care is needed. The only differe nce is that the Z ′ j -s and p ortions o f one of the P ′ m,ǫ now separate C ′ from γ ; that is, they surro und C ′ . This co ncludes the pr o of o f the le mma. W e now wish to define a mapping, by utilizing the cor resp ondence b e t ween Q ǫ and Q ′ ǫ . La ter, it will be sho wn that this mapping is ‘approximately confor mal’ when ǫ is small. F or a pa cking whose sets are all c ir cles, the nerve has a na tur al g eometric r ealization. In this r ealization, the vertices are the centers of the appro pr iate circles, a nd an edge b etw een vertices is the line segment joining them. The 2-cells are, of course, the reg ions determined by these edges, p oly gons. So we have tw o geo metric realiza tions fo r the nerve N , one coming from the pac king Q ǫ , and the other, from Q ′ ǫ . T his is the basis of the definition o f our ‘approximately confor mal’ map, f ǫ . Lo ok at the 2-cells of N . Exce pt for R ∗ , S ∗ 1 , S ∗ 2 , . . . , S ∗ n , every s uch 2-cell is a triangular 2- cell, a nd has a geometric realiza tion coming from Q ǫ , as a geometric tr iangle A , and a geo metr ic rea liz ation, coming from Q ′ ǫ , a s a geometric triangle A ′ . Such a tria ngle A will be calle d an inner t riangle (o f Q ǫ ), if its vertices co rresp ond to inner circles of Q ǫ . G ǫ will denote the union o f such inner tria ngles. The triangle A ′ , co rresp onding to an inner triangle A of Q ǫ , will b e calle d an inner triangle of Q ′ ǫ . T he unio n of the inner triangles of Q ′ ǫ will be denoted by G ′ ǫ . Let f ǫ be the mapping which is defined o n G ǫ , takes ea ch vertex of an inner triangle A to the co rre- sp onding vertex o f the corresp onding triangle A ′ , and is a ffine in each such A . In other w ords, f ǫ takes the COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 47 center of an inner circ le o f Q ǫ to the center o f the corre sp o nding c ir cle of Q ′ ǫ and is affine in each of the triangles which have a s vertices the centers o f three inner circle s o f Q ǫ that touch. It is immediate that f ǫ is w ell-defined, and is a homeo morphism b etw een its domain, G ǫ , a nd its range, G ′ ǫ . The following a ssertions are evident: Every G ǫ is con tained in G , a nd every co mpact subset of G is contained in G ǫ , once ǫ is small eno ug h. G ǫ is the unio n o f equila teral tr iangles, o f edg e-length ǫ . The bo undary of G ǫ is con tained in a 3 ǫ neighbor ho o d of the b o undary of G . 9.3 Quasiconformali t y Lemma. Ther e is some c onstant K such that e ach mapping f ǫ is K - quasic onforma l. F urthermor e, given a c omp act subset B ⊂ G and a num b er α > 1 , t hen f ǫ is α -qu asic onfo rmal on B , onc e ǫ is smal l enough. Pr o of. If sev en circles form a flower, as in Fig. 9.4, then it is easy to see that the ratio of the radius of any one of the sur r ounding cir cles to the center circle is bounded aw ay from zero . (This can b e deduced from the fact that three circles cannot to uch at a p oint. Also see [R-S,Ring Lemma]). This means that the ratio of the ra dii o f tw o touching circles of Q ′ ǫ which cor resp ond to inner cir cles o f Q ǫ is bounded. W e ma y conclude that the ratio of any t wo edges of an inner triang le of G ′ ǫ is bo unded. T ake an inner tria ngle A . A is equilateral and f ǫ maps it affinely ont o a triangle which is not to o far aw ay fro m being equila teral. This implies that ther e is some co nstant K so that every f ǫ is K -quasic onformal on every inner tria ng le, and from this the first assertio n o f the lemma follows. Figure 9.4. Sev en circles form a flo wer. In [R-S] and a lso in [He1 ], it has b een proven that the hexa gonal packing is rigid in the following sens e. In 48 ODED SCHR AMM any circle packing whic h is combinatorially equiv alent to k genera tions of the hexago na l pa cking around a circle C , the ratio of the r adius o f C to the radius of a ny of its neigh b ors approa ches 1, if k approa ches ∞ . (‘ k generations of the hexago nal pa cking a round a cir cle C ’ is the colle c tion of cir cles having combinatorial distance from C which is 6 k .) T ake a triangle A of G ǫ int ers ecting B . A circle of Q ǫ which corresp o nds to a v ertex in such a triang le is surr ounded in Q ǫ by man y g enerations of the hexagona l pac king, and many → ∞ as ǫ → 0 . The sa me is true in Q ′ ǫ for the cor resp onding circle. Applying the ab ove quo ted result to the situation in Q ′ ǫ , we deduce that A ′ , the tria ng le co rresp onding to A in Q ′ ǫ , is a s close as we can wish to b eing equilatera l, provided ǫ is small eno ugh. So given any α > 1 , once ǫ is small eno ugh, f ǫ is α -quasico nformal on any of the triangles comp osing G ǫ which meet B . Since G ǫ contains B for sufficiently small ǫ , this implies our assertion. The eq ui-quasiconfor mality just proved will help us deduce the following. 9.4 Separation Lemma. L et z b e s ome p oint in G . As ǫ → 0 the distanc e of f ǫ ( z ) to ∪ n j =1 P ′ j,ǫ ∪ γ ′ is b ounde d away fr om zer o. Pr o of. Let η b e some compac t subset of ( γ ′ 1 ∪ γ ′ 2 ) − { z ′ 1 , z ′ 3 } . W e firs t show that the distance of f ǫ ( z ) to η is bounded aw ay from zero. W e will construct a quadrilateral B ha ving edge s B 1 , B 2 , B 3 , B 4 . (Fig. 9.5). Let z 4 , z 5 , z 6 , z 7 be four po int s placed counterclo ckwise on γ b etw een z 3 and z 1 ; that is , in γ 3 . Let B 1 be the suba r c of γ 3 betw een z 4 and z 5 . Let B 2 be a s imple curve with endpoints z 5 , z 6 , which lies in G , except for its endpoints, and separates z fr om γ 1 ∪ γ 2 in G . Let B 3 be the subar c of γ 3 betw een z 6 and z 7 . Finally , let B 4 be a simple curve with endp oints z 7 , z 4 , which lies in G , e xcept for its endpo int s, so that the strip of G b et ween B 2 and B 4 do es not contain any of the sets F 1 , F 2 , . . . , F n . This strip is taken as the interior of our quadr ilateral B . It is clear that B 4 separates B 2 from γ 1 ∪ γ 2 in G . W e approximate the quadr ilateral B b y a quadr ila teral B ǫ in G ǫ which has sides B ǫ, 1 , B ǫ, 2 , B ǫ, 3 , B ǫ, 4 . W e do this in such a way that the distance fro m a p oint on any side B ǫ,j of B ǫ to the corr esp onding side B j of B is at most 3 ǫ , and so that B ǫ, 2 separates z in G ǫ from the p oints of G ǫ near γ 1 ∪ γ 2 , and B ǫ, 4 separates B ǫ, 2 in G ǫ from the po in ts o f G ǫ near γ 1 ∪ γ 2 . (It is easy to see that this can b e do ne; one ca n take B ǫ, 1 and B ǫ, 3 to lie on the b oundar y of G ǫ ). As ǫ → 0 the q ua drilatera l B ǫ tends to B , and the mo dulus o f B ǫ approaches the mo dulus of B . Since the f ǫ are equi- quasiconfor mal, b y the a bove lemma, we can deduce that the moduli of the quadr ilaterals B ′ ǫ def = f ǫ ( B ǫ ) are b ounded awa y from zer o and infinit y . COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 49 4 B 2 B z 1 z 2 z 3 z z 4 5 B B 1 B 3 z 6 z 7 z Figure 9. 5. The quadrilateral B . Set B ′ ǫ,j = f ( B ǫ,j ) . What do we know ab out the sides of the quadr ila terals B ′ ǫ ? Since B ǫ, 1 did not stray more tha n a constant times ǫ aw ay from γ 3 , w e know that any p oint on B ′ ǫ, 1 is at most a constan t n umber of c ir cles o f Q ′ ǫ aw ay from γ ′ 3 . A simila r argument holds fo r B ǫ, 3 . F rom the Resolution L emma, we may ther efore deduce tha t as ǫ → 0 , the sides B ′ ǫ, 1 and B ′ ǫ, 3 are c o nfined to sma ller and smaller neighbor ho o ds of γ ′ 3 . Suppo se that the distance of η to γ ′ 3 is d . Let ǫ be so small so that the distanc e fr om η to B ′ ǫ, 1 ∪ B ′ ǫ, 3 is 50 ODED SCHR AMM larger than d/ 2 . Supp ose that the distance of f ǫ ( z ) to η is δ , and that δ < d/ 4 . Since the qua drilateral B ′ ǫ separates f ǫ ( z ) from the p oints o f G ′ ǫ that are near η , we see that in the quadrilatera l B ′ ǫ there is a curv e c o f leng th sma ller than δ which connec ts the sides B ǫ, 2 and B ǫ, 4 , a nd who se distance to B ′ ǫ, 1 ∪ B ′ ǫ, 3 is > d/ 4 . Since the mo dulus of B ′ ǫ is b ounded aw ay from 0 and ∞ , this implys that δ ca nnot be arbitrarily small in re la tion to d . This establishes our claim that the distance o f f ǫ ( z ) to η is b ounded aw ay from zero. The same argument can yield s tronger r esults. The quadr ilateral B could be chosen to sepa rate an arbitrar y compac t subset of G fro m η . Therefore, the images under f ǫ of s uch a set a re b ounded a wa y from η . The same is true, of cour se, if we c ho ose η to b e a compa ct subset of ( γ ′ 2 ∪ γ ′ 3 ) − { z ′ 2 , z ′ 1 } or a compact subset of ( γ ′ 3 ∪ γ ′ 1 ) − { z ′ 3 , z ′ 2 } . Since γ ′ can b e r epresented as a union o f a co mpact subset of ( γ ′ 1 ∪ γ ′ 2 ) − { z ′ 1 , z ′ 3 } , a co mpact s ubset o f ( γ ′ 2 ∪ γ ′ 3 ) − { z ′ 2 , z ′ 1 } , and a co mpact s ubs et o f ( γ ′ 3 ∪ γ ′ 1 ) − { z ′ 3 , z ′ 2 } , we see that the image s under f ǫ of a c o mpact subset o f G ar e b ounded aw ay from γ ′ , a s ǫ → 0 . Now let Γ 1 be a s imple c losed curve in G which separa tes z from ∪ n j =1 F j , let Γ 2 be a s imple c losed curve passing throug h z , whic h sepa rates Γ 1 from γ . The images of Γ 1 under the f ǫ are b ounded awa y from γ ′ . Therefore, by lo oking at the image under f ǫ of the annuli b ounded by Γ 1 and the b o undary comp onent of G ǫ corres p o nding to γ , a nd using the eq ui-quasiconfor mality of the f ǫ again, we see that the diameter of f ǫ (Γ 1 ) is bo unded aw ay from zero. No w lo oking a t the images of the annulus b ounded by Γ 1 and Γ 2 , we can therefore conclude that the distance of f ǫ (Γ 1 ) to f ǫ (Γ 2 ) is b ounded aw ay from zero , b ecause the mo duli of these a nnuli are bounded aw ay from zero. Since f ǫ ( z ) ∈ f ǫ (Γ 2 ) , and f ǫ (Γ 1 ) separates f ǫ ( z ) from ∪ n j =1 P ′ j,ǫ , we see that f ǫ ( z ) is bounded aw ay from ∪ n j =1 P ′ j,ǫ . This completes the pro of of our lemma . Conclusion of the Pr o of of The or em 9.1. Pick some seq ue nce { ǫ k } conv erging to zer o, so that for each j = 1 , 2 , . . . , n the sets P ′ j,ǫ k conv erge, as k → ∞ , to so me s et, which will b e denoted by P ′ j . Let G ′ = H ′ − ∪ n j =1 P ′ j . F r om the Resolution Lemma it follows that any compact subset o f G ′ is contained in the image of f ǫ k , once k is lar g e eno ugh. The eq ui-quasiconfor mality implies that none of the sets P ′ j is a p o int, that these sets are disjoint , and therefore that G ′ is co nnected. Because of the equi-qua siconformality , by picking a subsequence if necessary , we may assume tha t the functions f ǫ k conv erge uniformly on compact subsets of G , and their inverses conv erge unifor mly on compac t subse ts of G ′ . Ass ume this, and denote the limit function of f ǫ k by f , and the limit function of f − 1 ǫ k denote by g . T a ke some point z ∈ G . The Separation Lemma implies that the set { f ǫ k ( z ) : k > k 0 } is contained in a compact s ubset of G ′ , once k 0 is larg e e no ugh. Therefore, since the functions f − 1 ǫ k conv erge uniformly to g on compact subsets of G ′ , we COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 51 hav e g ( f ( z )) = lim k →∞ f − 1 ǫ k ( f ǫ k ( z )) = z , and f is a homeomorphism. F r om the second part of the Quasiconfor ma lit y Lemma w e see that f is 1-quasico nformal, and therefore conformal. T o see that f maps G surjectiv ely o nt o G ′ , it is sufficient to show that g ( G ′ ) ⊂ G , becaus e then we ca n write f ( g ( w )) = lim k →∞ f ǫ k ( f − 1 ǫ k ( w )) = w . Clearly , g ( G ′ ) is co nt ained in the closur e of G , so it is sufficient to demonstrate that g is an op en mapping. F or this we quote the following result (see [L-V, p. 7 4]): The limit o f a lo ca lly uniformly c onv erging sequence o f K -qua siconformal maps defined in an o pen connected set is either a constant, or a K -quasiconformal map, and there fo re a homeomorphism. Le t w 1 , w 2 be distinct po int s in f ( G ) and let U be any connected op en set containing w 1 , w 2 whose clos ure is co nt ained in G ′ . The function g is no t c onstant in U , it takes distinct v alues in w 1 , w 2 . Therefore, by apply ing the a b ove quoted result to the sequence f − 1 ǫ k restricted to U , we conclude that g ( U ) ⊂ G . This cle arly implies g ( G ′ ) ⊂ G , and f is onto G ′ . Each P ′ j cannot b e a p oint, be c a use f is confo r mal. Therefore, since it is the limit o f the P ′ j,ǫ k -s, it must be homo thetic to P j . It is clear that the boundary of each F j corres p o nds under f to the resp ective P ′ j . Since f can b e (uniquely) extended contin uously to γ , it remains to verify that this extension maps γ 1 , γ 2 , γ 3 to γ ′ 1 , γ ′ 2 , γ ′ 3 resp ectively . T o see this, recall the quadrilateral B from the proof of the Sepa ration Lemma. There w e hav e shown that the imag e s under the f ǫ -s of the region of G whic h is separa ted by B from γ 1 ∪ γ 2 stay bo unded aw ay fr om any compact subset of γ ′ 1 ∪ γ ′ 2 . Since B ca n be c hosen to separ a te an ar bitrary p oint o f γ 3 − { z 2 , z 3 } from γ 1 ∪ γ 2 , we see that f maps p oints of γ 3 − { z 2 , z 3 } to p oints of γ ′ 3 . Similar statements are true for γ 1 , γ ′ 1 and γ 2 , γ ′ 2 . This es tablishes the b o unda ry v a lue require men t, and co mpletes the proo f. A Gene rali zed Beltrami Equation. Theorem 9.1 g ives the existence of a map satisfying the Cauc hy- Riemann equations a long with some bo undary conditions. W e will now present an a nalogue of Thm. 9 .1 with equations mor e general than the Cauch y-Riema nn equa tions. In the situation of the theore m, let z v ary in G , and let w v ar y in H ′ . Suppos e that to ea ch such pa ir ( z , w ) cor resp onds an ellipse E ( z , w ) ⊂ C in a contin uous ma nner. The ellipse E ( z , w ) is allowed to ha ve arbitra ry eccentricit y a nd o r ientation. (The po sition and size of E ( z , w ) will b e irr elev an t for o ur purpose s .) 52 ODED SCHR AMM Theorem 9.5. L et the situation b e as in The or em 9.1, and let E ( z , w ) b e an el lipse field as ab ove. The- or em 9.1 is stil l true if inste ad of re quiring the existenc e of a c onformal mapping, we r e quir e the existen c e of a qu asic onformal mapping f : G → H ′ − ∪ n j =1 P ′ j with the pr op erty that for almost every p oint z ∈ G the inverse image of E ( z , f ( z )) under the differ ential of f is a cir cle: (9.1) d f − 1 z E ( z , f ( z )) is a cir cle , for almost every z ∈ G. The r e quir ements other t han c onformality st ay the same. Theorem 9 .1 is obtained as a spec ial case when one takes all the ellipses E ( z , w ) to be circles. If g = g ( w ) denotes the in verse of f , then co ndition (9 .1) can b e tra ns formed to the form ∂ g ∂ ¯ w = µ ( g ( w ) , w ) ∂ g ∂ w almost ev ery where , where µ is a c o mplex contin uous function, | µ ( z , w ) | < 1 , whic h enco des the s hap e o f the ellipse field E ( z , w ) . Thu s (9.1) can be thought of as a generalized Be ltr ami equation for the inv erse o f f . There is yet another wa y to express co ndition (9.1). Let h be a homeomo rphism of G onto G ′ ⊂ H ′ , then h induces the contin uous ellipse field E ( h − 1 ( w ) , w ) on G ′ . This ellipse field induces a new co nformal structure on G ′ , in the following manner. T o spec ify a confor ma l structure one needs to sp ecify c onformal co ordinate c harts. Consider an open top olo gical disk D in G ′ . Solutions to the Beltr ami equation pro duce (an essentially unique) quasic o nformal homeomorphism from D onto the op en unit disk with the prop erty that its differential a t almost ev er y p oint w tak es the ellipse E ( h − 1 ( w ) , w ) to a circle. Let this be a co ordinate chart for D . Since a quasiconfo r mal homeomor phism whose differential at almos t every p oint takes a circle to a circle is co nfo r mal, it fo llows that these charts give a confor mal structur e for G ′ , induced by h . Condition (9.1) and the quasiconfor mality of f ar e together equiv alent to the statement that f is con- formal, when we use for the image of f the new co nformal str uctur e which f induces on it v ia the ellipse field E ( f − 1 ( w ) , w ) , w ∈ f ( G ) . W e shall now sketc h the mo dificatio ns needed in the pro of of Theorem 9.1 to prov e Theorem 9 .5. The construction of Q ǫ and T ǫ remains as ab ov e, but the pa cking H ′ ǫ will change. Its co m binator ics will remain the sa me, but for every circle C of Q ǫ the co rresp onding set C ′ in H ′ ǫ , instead of being a circle, will b e an ellipse C ′ which is homothetic to E ( z , w ) for some p oints z ∈ C and w ∈ C ′ . (Rather v aguely , one COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 53 can sa y that the corresp ondence C → C ′ is an a pproximate solution of our differen tial equation.) T o prov e the existence of s uch a packing H ′ ǫ , we cho ose an arbitr ary p oint z ∈ C , for every c ir cle C of Q ǫ . The functions w → E ( z , w ) are sha pe fields on H ′ , and Theorem 8.5 ca n b e use d to guar a ntee the existence of the required pac king H ′ ǫ . Now that we’ve g o t H ′ ǫ , the corre spo nding analog ue of the Resolution Lemma 9.2 is prov ed in exactly the same manner a s the pro of given; one only has to observe that there is a b ound on the eccentricit y of the ellipses in volv ed. This is b eca use the E ( z , w ) v ary contin uously as ( z , w ) v arie s in a compact s et. The definition of the mapping f ǫ has to undergo some cosmetic modificatio ns, b eca use the cont act point of tw o touching ellipses might not lie on the line connecting the cent ers of them. F o r the new definition o f f ǫ , w e use the follo wing geometric triangulatio n induced b y the packing H ′ ǫ . The v ertices of this geometric triangulation ar e the cent ers o f the ellipses a nd the contact p oints of any t wo touching ellipses. The center po int of each ellips e is joined by a line segmen t to every contact po in t o f it. Tw o contact po in ts of an ellipse are joined by a line segment if, and only if, they are co nsecutive contacts of the ellipse; i.e., there is n’t any other cont act p o ints on the shorter arc of the ellipse which joins them. It is easy to see that this pr o cedure gives a geometric triangulation (of par t of H ′ ). The co rresp onding pro cedure is done for the pa cking Q ǫ , and one gets a c orresp ondence b et ween triang les in b oth geometric tr iangulations. Now the mapping f ǫ is defined similar ly to its definition in the orig inal pro of, but using these new, more refined, triangulations. The first assertion of the Quasiconformality Lemma 9.3 and the Separation Lemma 9 .4 readily follo w. Here, again, all that is needed is the fact that the ellips es hav e b ounded ecce n tricity . Then it is c le ar that some sequence of ǫ → 0 can b e ch os en so that the f ǫ conv erge uniformly on co mpact subsets. If the limit function is denoted by f , then f induces a new conformal str ucture o n its imag e, the o ne induce d by the assignment o f the ellipse E ( f − 1 ( w ) , w ) to each po int w ∈ f ( G ) . By contin uity of the ellipses E ( z , w ) , it follows that near a po in t w , for sufficiently sma ll ǫ (and f ǫ near f ), all the ellipses of H ′ ǫ will be o f homothet y t yp e close to E ( f − 1 ( w ) , w ) . This mea ns that the second part of the Q uasiconfor ma lit y Lemma holds, when one takes the new c o nformal structure induced on the image o f f , and we see that f is co nformal, in this conformal structure; verifying the claim. Shap e Fields, R evisited. Another gene r alization of Theorem 9.1 is obtained if instead o f ha ving the sets P ′ j be s p ecified up to homothety , they a re r equired to b e in the ima ge of given shap e fields. F or the 54 ODED SCHR AMM conv enience of the reader w e will state a n abridged version of this gene r alization. 9.6 Theorem. L et H and H ′ b e b ounde d Jor da n do mains in C , and let thei r b oundari es b e the Jor dan curves γ and γ ′ , r esp e ctively. Set G = H − ∪ n j =1 F j , wher e the F j ar e some disjo int c onne cte d c omp act subsets of H c ontaining mor e than one p oint. L et F 1 , . . . , F n b e shap e fields on H ′ . Su pp ose tha t thr e e distinct c ounter clo ckwise or der e d p oints ar e chosen z 1 , z 2 , z 3 ∈ γ , and similarly z ′ 1 , z ′ 2 , z ′ 3 ∈ γ ′ . Then ther e ar e sets F ′ 1 , . . . , F ′ n , with e ach F ′ j in the image of the shap e field F j (se e the definitions of t he pr evious se ction), and ther e is a c onformal e quivalenc e of G and H ′ − ∪ n j =1 F ′ j , so that un der this c onformal e quivale nc e e ach F j c orr esp onds to F ′ j , and e ach z k c orr esp onds to z ′ k , ( k = 1 , 2 , 3 ) . Pr o of. The pro o f of The o rem 9.1 generaliz e s directly to prove Theor em 9.6; the o nly change is tha t an appe al to T he o rem 8.5 r eplaces the co rresp onding appea l to Theo r em 8.3. H’ Figure 9.5. A fol iation of a neighborho od of H ′ b y li ne segments. W e c lose this sectio n with an example of a class of s hap e fields having in teres ting imag es. Let H ′ be a Jordan domain. Suppo se that a neighborho o d o f H ′ is foliated by straig h t line segments (see Fig . 9.6). One can define a shap e fie ld on H ′ by assigning to each p oint p ∈ H ′ a line segment of length one with center at 0 whose direction is the direction of the fo lia tion at p . The image of this s ha p e field is the collection of all line segments contained in the leav es of the foliation. Given a finitely connected planar do main G , one can use Theorem 9.6 and this example to cons tr uct a conformally equiv a lent ‘s lot do main’, with slots contained COMBINA TOR ICALL Y PRESCRIBED P ACKINGS 55 in the leaves of the fo lia tion. This y ields a g eneralizatio n of some of the canonical slot domains int ro duce d by Ko eb e. (See [Si]). References [ An1 ] E. M. Andreev, On c onvex p olyhe dr a in L ob a ˇ cevski ˘ ı sp ac es , Mat. Sb. (N.S.) 81 (123) (197 0), 445–478; English transl. in Math. USSR Sb. 10 (1970), 413–440. [ An2 ] , On c onvex p olyhe dr a of finit e volume in L ob aˇ cevski ˘ ı sp ac e , Mat. Sb. (N.S.) 83 (125) (1970), 256– 260; English transl. in Math. USSR Sb. 12 (1970), 255–259. [ C-M-S ] R. Couran t, B. Manel and M. Shiffman, A g ener al the or em on c onformal mapping of multiply c onne cte d domains , Pro c. Nat. Academy of Science (USA) 2 6 (1940), 503–507. [ He1 ] Zheng-Xu He, An estimate for hexagonal cir cle p acki ng s , J. Di fferen tial Geometry (to app ear). [ He2 ] , Solving Beltr ami e quations by c ir cle p acking , T r ans. of the A MS (to app ear). [ L-V ] O. Leh to and K. I. Virtanen, Quasic onform al mappings in the plane , translated f rom German, Springer, 1973, pp. 258. [ R-S ] B. Ro din and D. Sulliv an, The co nver genc e of cir cle p ackings to the Riema nn mapping , J. Di fferen tial Geometry 26 (1987), 349–360. [ Sch1 ] O. Schramm, Packing two-dimensional b o dies with pr escrib e d c ombinatorics and applic ations to t he c onstruction of c onformal and quasic onformal mappings , Ph.D. thesis, Pr inceton 1990. [ Sch2 ] , Existenc e and uniqueness of p acking s with sp e cifie d c ombinatorics , Israel J. Math. (to appear). [ Sch3 ] , How to c age an e gg , preprint. [ Si ] R. J. Sibner, ‘Uniformizations’ of infinit ely c onne cte d dom ains , Adv ances i n the theory of Riemann Surfaces, Pr oc. of the 1969 Ston y Bro ok Conf., Ann. of Math. Studies, Princeton Universit y Press, 1971, pp. 407–419. [ Th ] W. P . Thurston, The ge ometry and top olo gy of 3-manifolds , Princeton Universit y Notes.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment