Cs-Ro
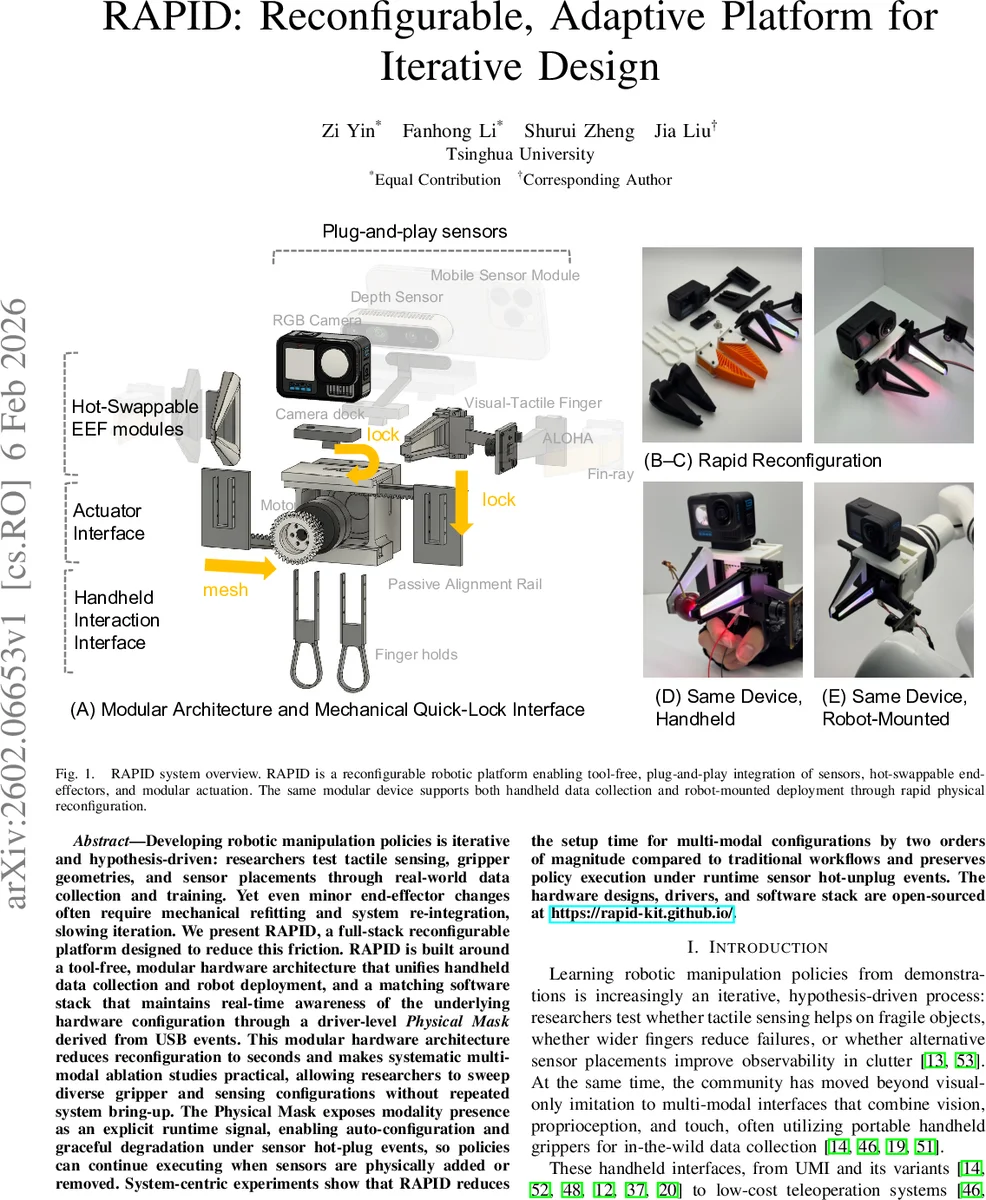
RAPID: Reconfigurable, Adaptive Platform for Iterative Design
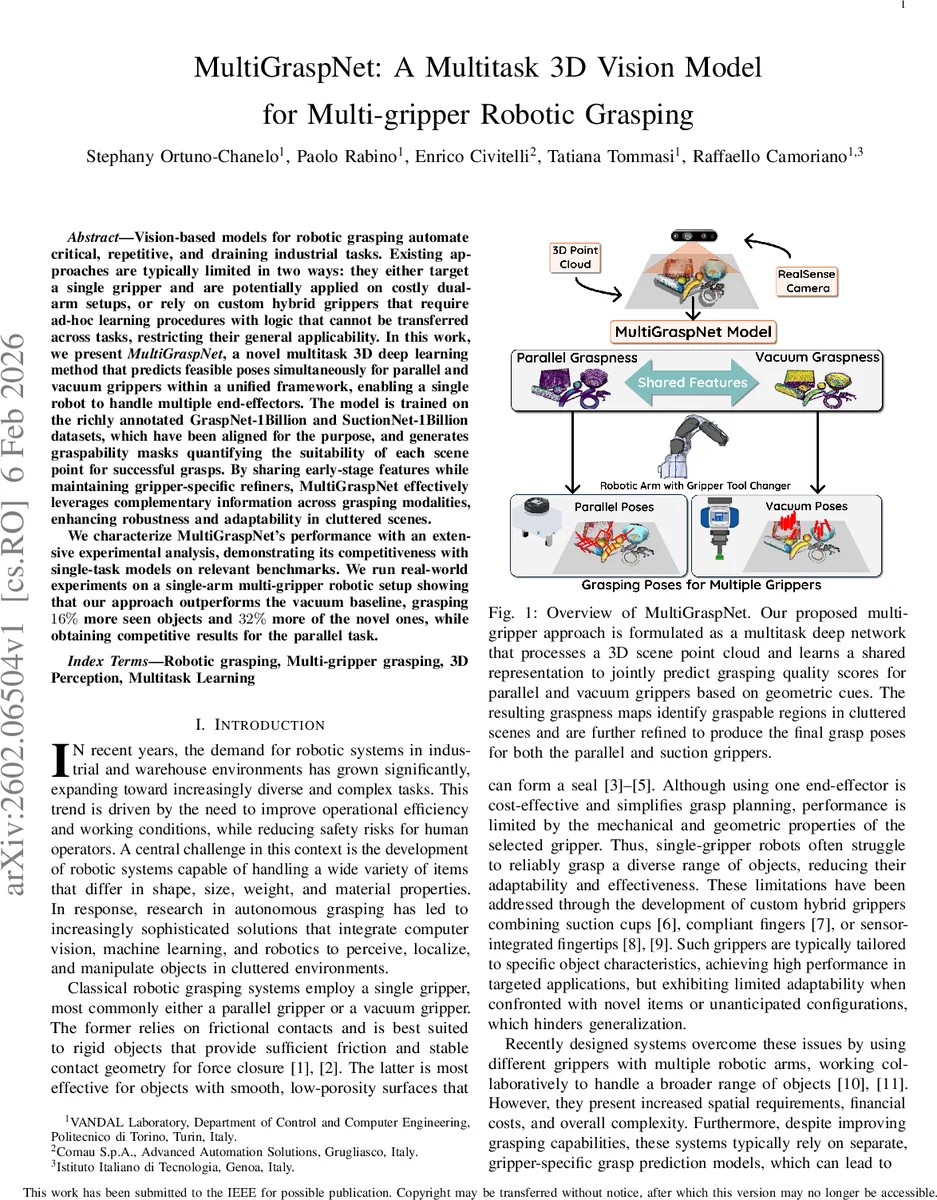
MultiGraspNet: A Multitask 3D Vision Model for Multi-gripper Robotic Grasping
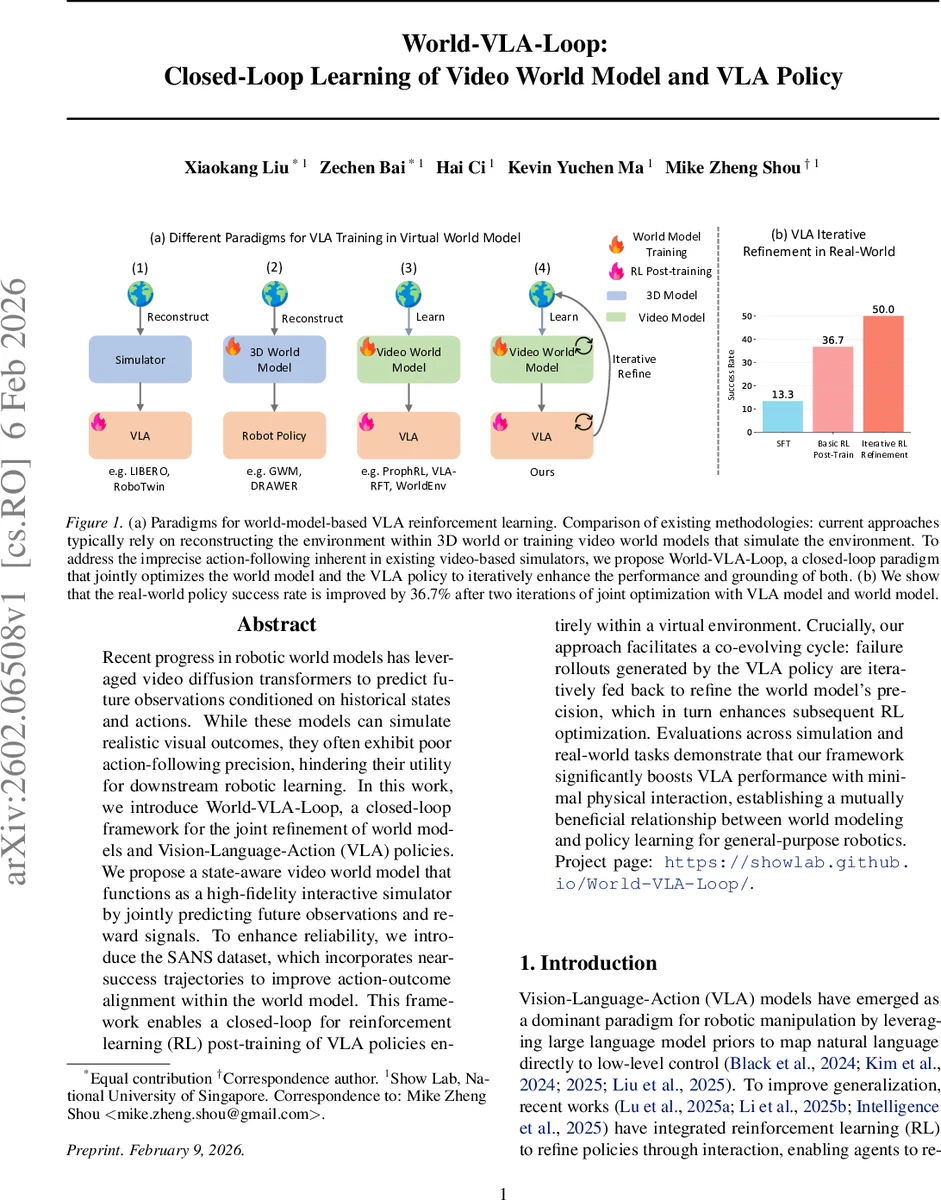
World-VLA-Loop: Closed-Loop Learning of Video World Model and VLA Policy
SPIDER: Scalable Physics-Informed Dexterous Retargeting
TFusionOcc: Student's t-Distribution Based Object-Centric Multi-Sensor Fusion Framework for 3D Occupancy Prediction
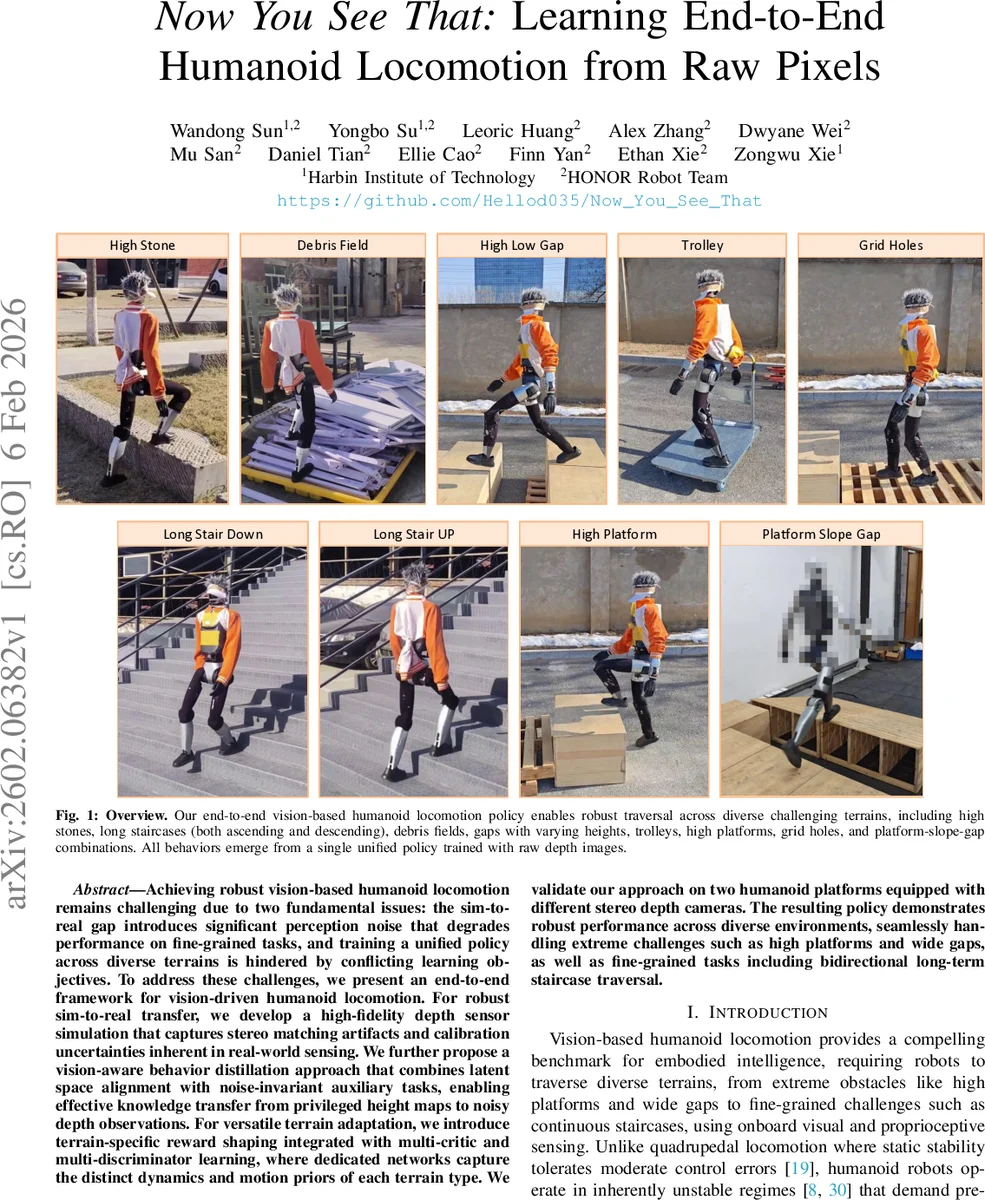
Now You See That: Learning End-to-End Humanoid Locomotion from Raw Pixels

Towards Adaptive Environment Generation for Training Embodied Agents

ECO: Energy-Constrained Optimization with Reinforcement Learning for Humanoid Walking